4. Laplacetransformmetoder
|
|
|
- Barbro Jonasson
- för 5 år sedan
- Visningar:
Transkript
1 4. Laplacetranformmetoder 4. Laplacetranformmetoder Differentialekvationer utgör grunden för en matematik bekrivning av dynamika ytem i kontinuerlig tid bekriver hur en vi variabel, utignalen, beror av en eller flera andra variabler, inignaler Efterom inignaler är oberoende av varandra kan vi för ett ytem med flera inignaler normalt betrakta en inignal i taget. Ett ytem med koncentrerade parametrar kan då allmänt bekriva med en ordinär differentialekvation av formen n n1 m m1 d y d y dy d u d u du g,,,, y,,,,, u 0 n n1 m m1 (4.1) där u = inignal, y = utignal, g() = goycklig analytik funktion. Storheten n = ordningen på högta utignalderivatan = ytemet ordningtal. Normalt är n m. Ett ådant ytem är propert; motaten är ett icke-propert ytem. Reglerteknik I Grundkur (419300) 4 1 Om funktionen g() är linjär, kan DE:n kriva på formen n n1 m m1 d y d d d d d 0 y 1 y u u u n n 1 n1 n 0 m 1 m1 m1 m (4.) a a a a y b b b b u Koefficienterna a 0, a 1,, a n, b 0,, b m är ytemparametrar om karakterierar egenkaperna ho det linjära ytemet. Parametrarna kan (om å önka) omkala med en goycklig faktor olik noll: a0 1 alltid möjligt efterom n:te ordningen DE har a0 0 an 1 möjligt om an 0 Om icke-propra ytem utelute, kan man alltid välja m n; icke-förekommande inignalderivator får då en b-koefficient = noll. I praktiken gäller ofta b0 0, vilket är ett trikt propert ytem. Om man väljer kalning å att a0 1, kan DE:n då kriva n n1 n1 y y y u u a n 1 a n 1 n1 any b1 b n 1 n1 bnu (4.3) d d d d d Ob. hur koefficienterna nedre index är förknippade med derivatorna ordningtal. 4. Laplacetranformmetoder 4 För linjära ytem gäller uperpoitionprincipen: Om funktionparen u1(), t y1() t och u(), t y() t är löningar till (4.) å är även funktionparet ut (), yt () en löning, om få genom en goycklig linjär kombination ut () au 1() t bu () t, yt () ay1() t b y() t Grundläggande matematik gör det möjligt att löa den linjära DE:n (4.) eller (4.3) om ytemparametrarna är kontanta och inignalen ut () har en någorlunda enkel form. Löningen, dv utignalen yt, () erhålle då om umman av en partikulärlöning och den allmänna löningen till motvarande autonoma ytem, om få när DE:n högerled ätter = 0 (dv ett ytem utan inignal!). Att löa linjära DE:r med denna metod är dock komplicerat: Det matematika arbetet blir bevärligt vid ytem av högre ordningtal. Metoden erbjuder inga bekväma genvägar för att behandla ammanatta ytem, uppbyggda av enklare linjära delytem. För praktik hantering av ytem baerade på linjära DE:r kommer vi att utnyttja Laplacetranformen Den har en central roll i grundläggande analy- och yntemetoder för linjära ytem. Den är peciellt lämplig för ytem med en inignal och en utignal (SISO-ytem). Metoder baerade på tilltåndbegreppet är ofta lämpligare för ytem med flera inignaler och flera utignaler (MIMO-ytem). Tilltåndmetoder behandla närmare i kuren Reglerteknik II. 4. Laplacetranformmetoder Laplacetranformmetoder 4 4
2 För att motivera användningen av Laplacetranformmetoder kall vi fört tudera ett ytem bekrivet av en enkel linjär DE med hjälp av traditionella löningmetoder. Exempel 4.1. Stegvaret för en kvickilvertermometer. Dynamiken för en kvickilvertermometer bekriv av differentialekvationen d T 1 (1) där = kvickilvret temperatur och 1 = omgivningen temperatur. Antag att termometern finn utomhu och att jämviktläge råder. Då är 1 1, där 1 betecknar den kontanta utetemperaturen. Antag nu att termometern för inomhu, där temperaturen är lika med 1 1. Hur förändra kvickilvret temperatur i termometern om funktion av tiden? Det förefaller rimligt att anta att temperaturen förändra exponentiellt från 1 till 1 1 enligt figur Vi kan kontrollera detta antagande amt betämma hur nabbt förändringen av ker genom att löa DE:n (1). 0 t Enligt vår hypote kulle förändringen ha Figur 4.1. Stegvar för Hg-termometer. formen bt () t ae c, b 0 () där villkoret b 0 förhindrar att när t. Kan differentialekvationen ge upphov till en löning av denna typ? 4. Laplacetranformmetoder Laplacetranformmetoder 4 6 Vi kontrollerar genom att derivera ovantående uttryck, vilket ger d bt abe (3) Inättning i differentialekvationen ger bt bt Tabe a e c (4) Efterom högra ledet är en kontant, måte ockå väntra ledet vara lika med amma kontant för alla t. Detta är endat möjligt om bt bt bt Tabe a e (1 Tb) a e 0 (5) dv om b 1/ T, c 1 1 (6) Inättning i () ger då / () t ae t T 1 1 (7) Ytterligare vet vi att (0) 1. Detta ger (0) 1 a1 1, dv a 1 (8) Vi får då att förändra exponentiellt enligt / () t 1e t T 1 (9) där () t () t 1. Ob. att (9) inte är en allmän modell för termometern utan en löning om gäller för en pecifik förändring av inignalen. 4. Laplacetranformmetoder Laplacetranformmetoder 4 8
3 4. Laplacetranformmetoder 4..1 Definition 4. Laplacetranformen 4..1 Definition De ignaler om uppträder i dynamika ytem är funktioner av tiden. Betrakta en tämligen goycklig ignal f () t med den egenkapen att f () t 0för t 0, integrerbar för t 0 Laplacetranformen F() L f() t för tidfunktionen () f t definiera då av integraluttrycket L t (4.4) 0 F() f() t e f()d t t där är en komplex variabel, var realdel är (mint) å tor att integralen konvergerar. Man äger att F() är definierad i Laplaceplanet eller -planet medan f () t är definierad i tidplanet. Rekommendera att man betecknar tidfunktioner med må boktäver (gemena) och dera Laplacetranformer med motvarande tora boktäver (veraler). Reglerteknik I Grundkur (419300) 4 9 För att Laplacetranformen kall kunna utnyttja praktikt kräv att man ockå kan beräkna den tidfunktion f () t om motvarar Laplacetranformuttrycket F(). Denna operation, dv övergången från F() till f () t, kalla invertranformering. 1 Invertranformen f () t L F( ) ge av uttrycket j 1 1 t ft () L F ( ) e F ( )d j (4.5) j där j 1 är den imaginära enheten och är ett reellt tal, om bör vara å tort att F() aknar ingulariteter (dv är begränad) för alla med törre realdel än. Vid praktik räkning med Laplacetranformen klarar man ig utan ekvation (4.5) behöver man ällan använda definitionen (4.4) 4. Laplacetranformen Definition 4. Laplacetranformen I tället utnyttjar man formelamlingar (t.ex. T. Gutafon Ingenjörmatematik formelamling ) där vanligen förekommande tidfunktioner och dera Laplacetranformer finn tabellerade. Med hjälp av en ådan tabell kan man tranformera båda vägarna. Funktioner, om inte finn tabellerade, kan å gott om alltid erhålla om någon kombination av tabellerade funktioner. Efterom Laplacetranformuttrycken är algebraika uttryck, medför dylika kombinationer och motvarande uppdelningar inga törre beräkningmäiga problem. Laplacetranformen kan använda för löning av differentialekvationer. Avancerade metoder för analy av modeller uttryckta med hjälp av Laplacetranformen exiterar (tabilitetanaly, frekvenanaly). 4.. Beräkning av Laplacetranformen för några enkla funktioner Pulfunktionen En ideal pul om tartar vid t 0 karakteriera av en kontant amplitud a och en varaktighet (pullängd) T, e figur 4.. Med hjälp av f(t) Laplacetranformen definition (4.4) få a T T T t 1 t 1 e F () e aa e a 0 0 (4.6) T t Figur 4.. Pulfunktion. Deign av reglerytem med frekvenplanmetoder. 4. Laplacetranformen Laplacetranformmetoder 4 1
4 4.. Beräkning av Laplacetranformen för några enkla funktioner 4.. Beräkning av Laplacetranformen för några enkla funktioner Enhetimpulen (t) Dirac deltafunktion Vi kan definiera en impul om en pul var varaktighet T går mot noll, amplitud a går mot oändligheten pularea at har ett ändligt värde olika noll För enhetimpulen () t gäller att at 1 (uttryckt i någon lämplig enhet). Laplacetranformen för en enhetimpul vid t 0 kan erhålla genom Taylorerieutveckling och gränvärdeberäkning med a 1/ T i ekvation (4.6). Vi får T 1 1 e T ( T ) F () L () t lim lim 1 (4.7) T0 T T0 T Räknande med impuler har praktik innebörd på många områden, åom elektrika, mekanika och proceteknika områden. Alla kortvariga inignaler kan normalt behandla om impuler karakterierade enbart av pularean oberoende av pulen exakta form. Typika exempel är pänning- och trömpuler i elektrika ytem tötkrafter i mekanika ytem injicering av pårämnen i medicinka och proceteknika tillämpningar 4. Laplacetranformen 4 13 Enhetteget (t) En tegfunktion kan betrakta om en pul med oändlig varaktighet T. Laplacetranformen för enhetteget () t, om har a 1, få genom en gränvärdebetraktele: 1 e 1 F () L () t lim (4.8) T Enhetrampen (t) En ramp är en funktion var värde förändra linjärt med tiden. Enhetrampen () t är en ramp med lutningkoefficienten 1, dv () t t, t 0. Med hjälp av partiell integration få t e t e t 1 e 1 F () L () t te t 1 0 t (4.9) 4. Laplacetranformen 4 14 T Beräkning av Laplacetranformen för några enkla funktioner 4.. Beräkning av Laplacetranformen för några enkla funktioner Ett amband mellan de enkla enhetfunktionerna Figur 4.3 illutrerar uteendet ho enhetimpulen, enhetteget och enhetrampen. impulen kan betrakta om derivatan av teget teget är derivatan av rampen Omvänt gäller att teget är integralen av impulen rampen är integralen av teget Notera de tre funktionerna Laplacetranformer, dv 1, 1/ rep. 1/. () t () t () t t t t Figur 4.3. Enhetimpulen () t, enhetteget () t och enhetrampen () t. 4. Laplacetranformen 4 15 Exponentiellt avklingande funktion En exponentiellt avklingande funktion definiera f() t e at, t 0. Laplacetranformen: L at t at ( a) t 1 ( a) t 1 a a (4.10) F () e e e e e Sinu- och coinufunktioner För härledning av Laplacetranformer för inu- och coinufunktioner behöv uperpoitionaten (4.13), om ge i näta avnitt. Därutöver kan vi utnyttja (4.10) genom att låta parametern a vara imaginär. Vi utnyttjar Euler identitet för inbt, om ger jbt jbt e e inbt j där j 1 betecknar den imaginära enheten. 4. Laplacetranformen 4 16
5 4.. Beräkning av Laplacetranformen för några enkla funktioner 4. Laplacetranformen Tillämpning av ekvation (4.10) ger 1 bt 1 bt b L L L (4.11) j j bt F () in e e j j j jb jb b För cobt gäller enligt Euler identitet e cobt och analogt med härledningen av (4.11) få jbt 4. Laplacetranformen 4 17 e j j bt jbt 1 bt 1 bt L L L (4.1) F () co e e jb jb b 4..3 Räkneregler för Laplacetranformer Superpoitionaten Om F 1 () och F () är Laplacetranformerna för tidfunktionerna f 1 () t och f () t å gäller för en linjär kombination av dea där A och B är goyckliga kontanter. Bevi: L L A f1() t B f() t AF1( ) BF( ) (4.13) t A f () t B f () t e A f () t B f () t t t A e f ( t)b e f ( t)d t AF( ) BF ( ) Invertranformen uppfyller amma egenkap, dv 1 L AF1( ) BF() A f1() t B f() t (4.14) 4. Laplacetranformmetoder Räkneregler för Laplacetranformer 4..3 Räkneregler för Laplacetranformer Deriveringaten Om F() är L-tranformen för f () t å ge L-tranformen för derivatan f d f / av L f () t F() f(0 ) (4.15) där f (0 ) är tidfunktionen f () t : värde när man närmar ig t 0 från negativa idan. Bevi: Med partiell integration få t t t L f( t) e f ( t) e f( t) ( )e f( t)d t F( ) f(0 ) Ett ucceivt utnyttjande av deriveringaten ger följande uttryck för Laplacetranformen för n:te derivatan f d f / av funktionen f () t : ( n) n n ( n) n n1 n ( n) ( n1) L f F( ) f(0 ) f (0 ) f (0 ) f (0 ) (4.16) Bortett från begynnelevärdena f (0 ), f (0 ), etc., å motvara en derivering av en tidfunktion av en multiplikation med Laplacevariabeln i Laplaceplanet. Laplacevariabeln har ålede tora likheter med differentialoperatorn p dd / t. 4. Laplacetranformen 4 19 Integrationaten Om F() är L-tranformen för f () t å ge L-tranformen för tidfunktionen integral av t 1 L f ( )d F ( ) (4.17) 0 t Bevi: Vi utnyttjar beteckningen gt () f ( )d om ger gt () f() t. Tillämpning av 0 deriveringaten (4.15) på funktionen gt () ger då t F() L f() t L g () t L g() t g(0 ) L g() t L f( )d 0 där g(0 ) 0 följer av definitionen på gt. () Genom ucceiv tillämpning av (4.17) få Laplacetranformen för en n-faldig integral: t t t n 1 L f ( )d F ( ) (4.18) n Laplacetranformen 4 0
6 4..3 Räkneregler för Laplacetranformer 4..3 Räkneregler för Laplacetranformer Dämpningaten Om F() är Laplacetranformen för f () t å ge Laplacetranformen för den exponentiellt dämpade tidfunktion e at f ( t) av Bevi: L L e at f ( t ) F ( a ) (4.19) at t at a t ( ) e f ( t) e e f( t) e f( t)d t F( a) Laplacetranformen 4 1 Förkjutningaten Om F() är Laplacetranformen för f () t å ge Laplacetranformen för funktionen f ( t L), dv funktionen f () t fördröjd med L tidenheter, e figur 4.4, av L L f ( tl) e F( ) (4.0) Bevi: Med variabelubtitutionen t L amt genom att f () t 0för t 0 få L f () t f ( t L) t t Figur 4.4. Ofördröjd och fördröjd tidfunktion f () t. t ( L) L L f ( tl) e f( tl) e f( )d e e f( )d e F( ) 0 L 0 4. Laplacetranformen 4 L 4..3 Räkneregler för Laplacetranformer 4..3 Räkneregler för Laplacetranformer Gränvärdeater För en tidfunktion f () t och de Laplacetranform F() gäller att må värden på tiden t motvara av tora värden på Laplacevariabeln, och vice vera. De.k. gränvärdeaterna ger konkreta uttryck för detta amband. Begynnelevärdeaten För en tidfunktion f () t och de Laplacetranform F() gäller, under förutättning att F() är trikt proper, lim f ( t) lim F( ) (4.1) t0 Slutvärdeaten För en tidfunktion f () t och de Laplacetranform F() gäller, under förutättning att F() aknar ingulariteter (dv är begränad) för alla med icke-negativ realdel lim f ( t) lim F( ) (4.) t 0 Övning 4.1. t t Beräkna Laplacetranformen för tidfunktionen f() t 68e 5e. Kontrollera reultatet med begynnele- och lutvärdeaterna. Övning 4.. 0,8,4e Betäm den tidfunktion om har Laplacetranformen. 3,6 Övning 4.3. Härled Laplacetranformen för en fördröjd f () t ågtandpul enligt figuren t Figur 4.5. Sågtandpul. 4. Laplacetranformen Laplacetranformen 4 4
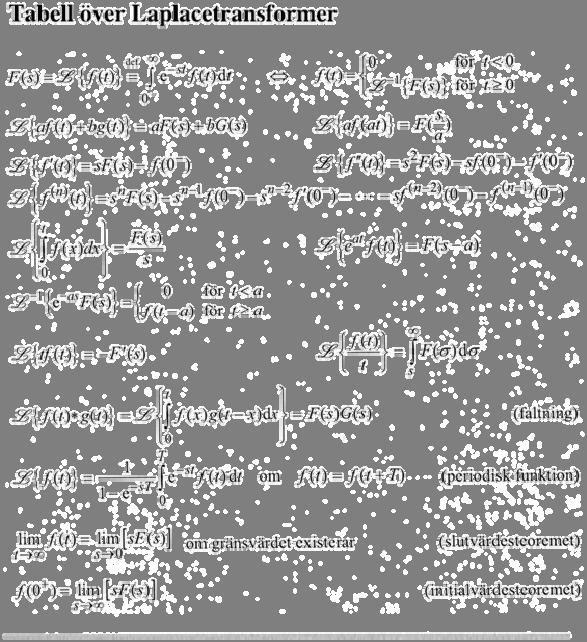
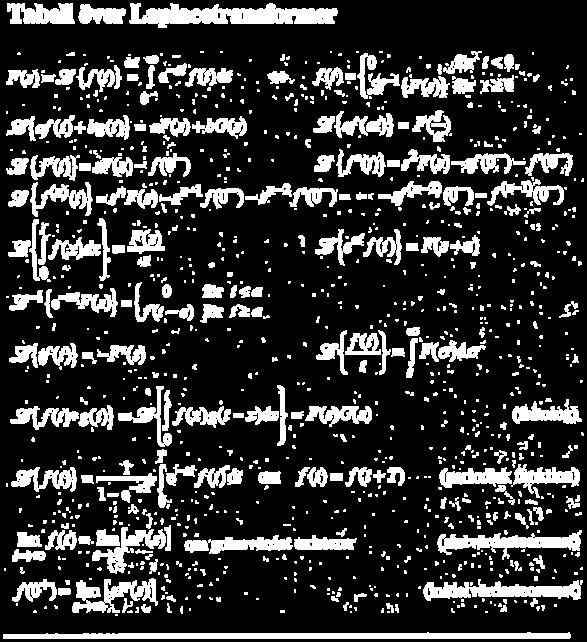
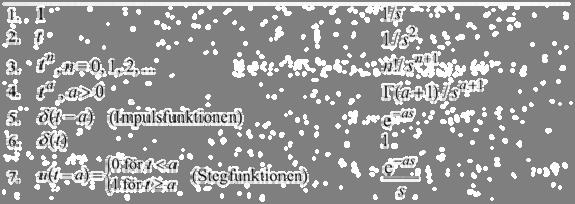
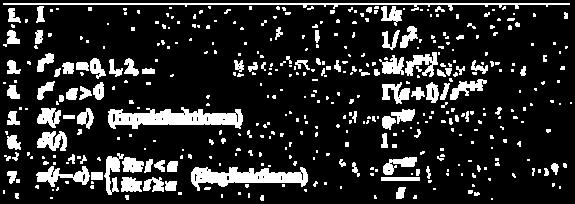
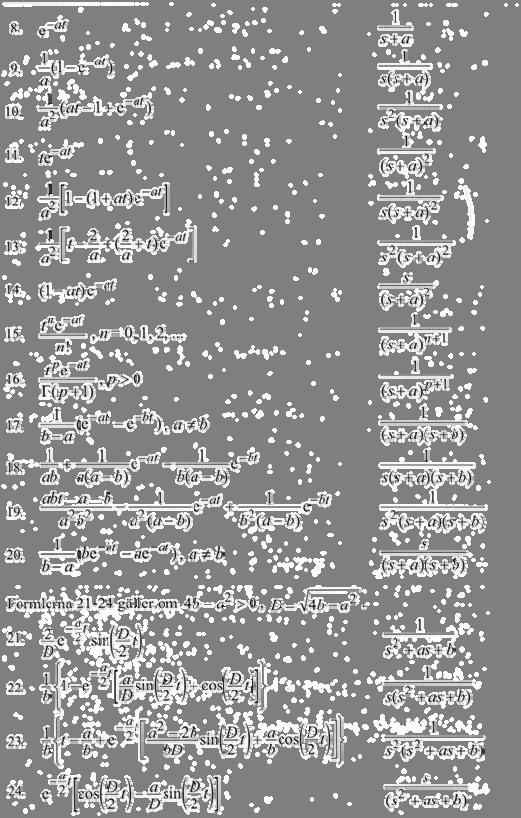
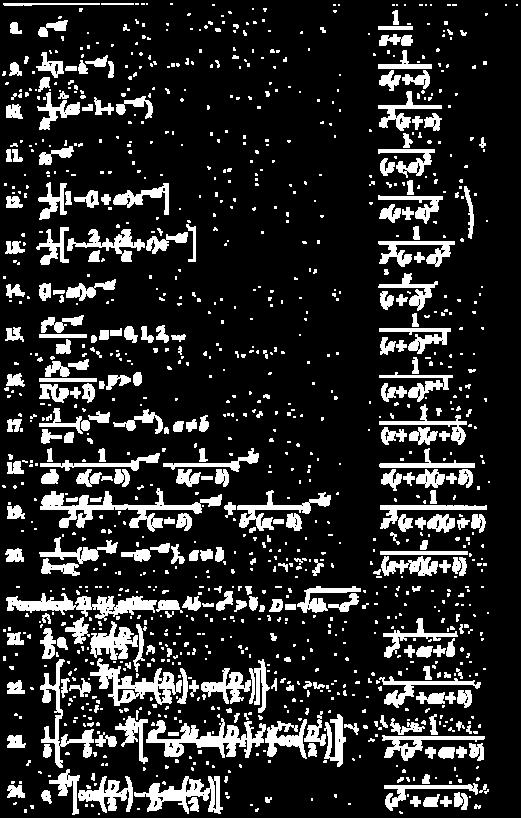
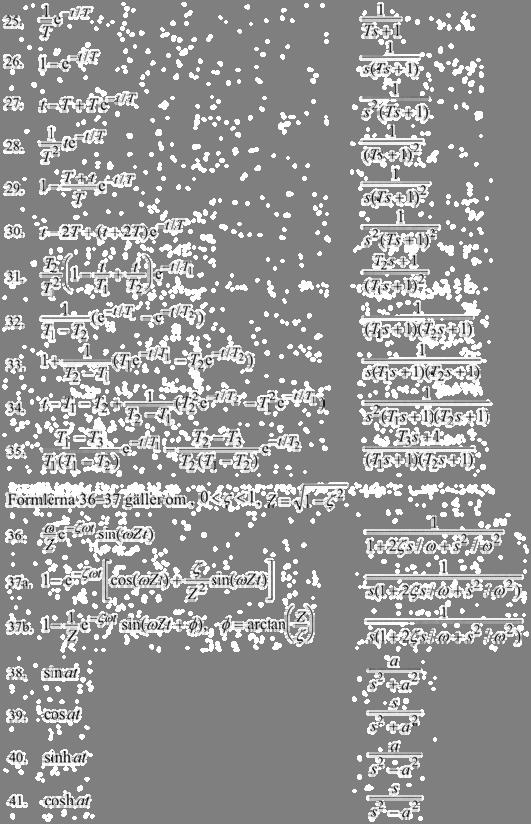
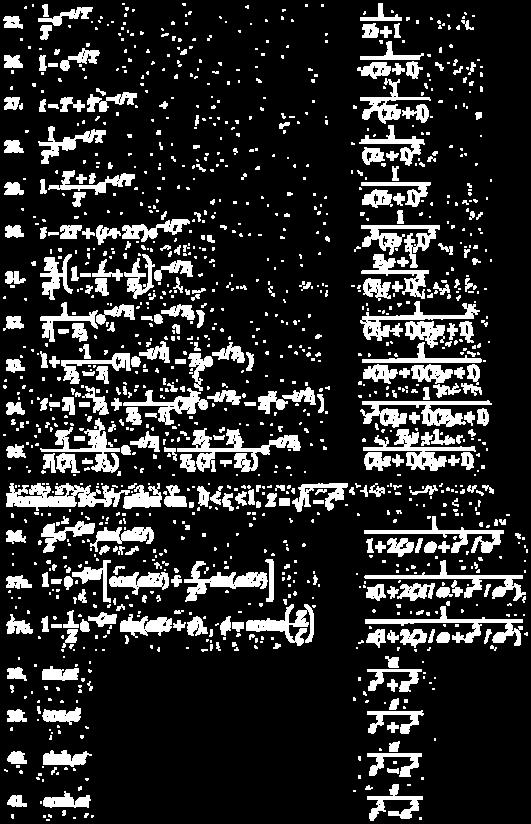
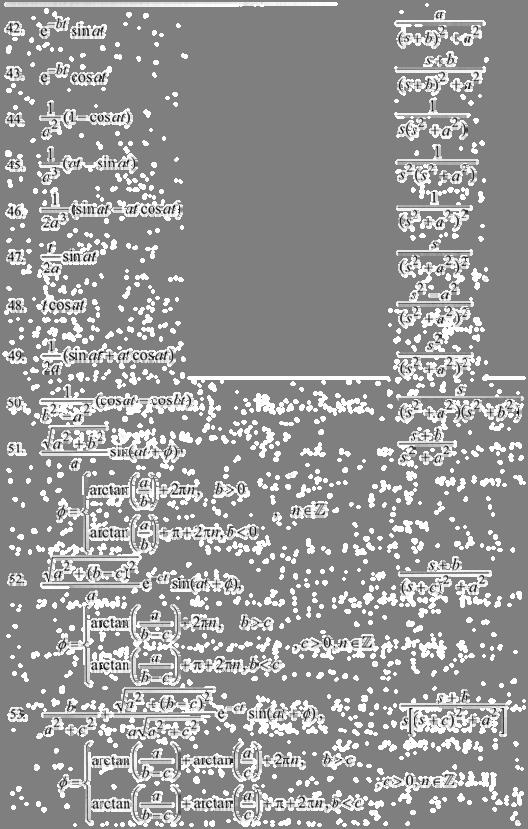
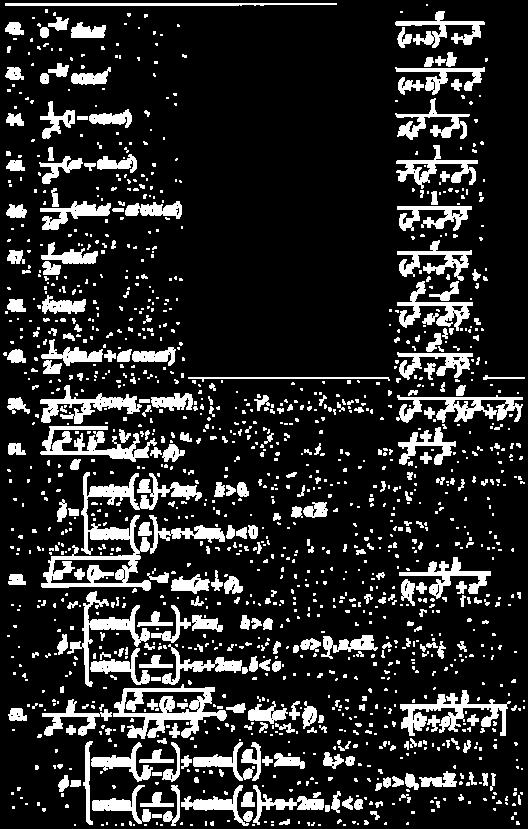
7 Laplacetranformtabell Laplacetranformtabell 4. Laplacetranformen Laplacetranformen 4 6 Laplacetranformtabell Laplacetranformtabell 4. Laplacetranformen Laplacetranformen 4 8
8 4. Laplacetranformmetoder Överföringfunktionen 4.3 Bekrivning av dynamika ytem i Laplaceplanet Överföringfunktionen Antag att DE:n (4.) atifiera av variabelvärdena ( n) ( n1) ( m) ( m1) y, y,, y, y, u, u,, u, u dv detta är en löning till DE:n. Om detta tilltånd är av peciell betydele kan vi kalla det för ett referentilltånd eller en arbetpunkt. Ofta är denna punkt ett tationärtilltånd, även kallat fortfarighettilltånd eller jämviktläge, där alla derivator är noll (men detta behöver inte alltid vara fallet). ( n) ( n1) ( m) ( m1) Ett tilltånd y, y,, y, y, u, u,, u, u, om atifierar DE:n, kan relatera till ett referentilltånd enligt ( n) ( n) ( n) ( n1) ( n1) ( n1) y y y, y y y,, y y y, y y y ( m) ( m) ( m) ( m1) ( m1) ( m1) u u u, u u u,, u u u, u u u där -variablerna anger avvikeler från referentilltåndet. Reglerteknik I Grundkur (419300) 4 9 Inättning av dea variabler i DE:n (4.) ger efter bortförkortning av referentilltåndet och valet a0 1 n n1 m m 1 y y y u u u n 1 n1 n1 n 0 m 1 m m1 m d d d d d d a a a y b b b b u (4.3) Laplacetranformering av (4.3) ger, med beaktande av att alla begynnelevärden för - variablerna är noll, n n1 Y() a1 Y() an1y() any() (4.4) m m1 b 0 U() b 1 U() bm1u() bmu() där Y() och U() är Laplacetranformerna av yt () rep. ut (). n En n:te derivata ger ålede vid Laplacetranformering upphov till en faktor när begynneletilltåndet är noll. 4.3 Bekrivning av dynamika ytem i Laplaceplanet Överföringfunktionen Överföringfunktionen Ekvation (4.4) kan även kriva n n1 m m1 ( a 1 an1an) Y() ( b 0 b 1 bm1bm) U() (4.5) eller kompaktare Y() G() U() (4.6) där m m1 b 0 b 1 bm1bm B () G () (4.7) n n1 a1 an1an A() är ytemet överföringfunktion. Ibland tala även om överföringoperator, men denna benämning är miviande efterom både och G () är variabler. G (p), där p d/, är en överföringoperator. Vi er att vid beräkningar i Laplaceplanet få ytemet utignal genom multiplicering av de inignal med ytemet överföringfunktion. I ekvation (4.7) betecknar A() överföringfunktionen nämnare och B () de täljare. Ekvationen A() 0 är ytemet karakteritika ekvation; rötterna till A() 0 kalla ytemet poler; rötterna till B () 0 kalla ytemet nolltällen. Betydelen av poler och nolltällen behandla närmare i kapitlen 5 och 6. Ifall ytemet innehåller en ren tidfördröjning, även kallad döid (e kapitel 5), å att det tar en tid L innan en inignal börjar påverka ytemet, kan i ekvation (4.4) göra ubtitutionen ut () vt ( L), där v är den verkliga inignalen. Användning av -variabler amt Laplacetranformering ger L U()=e V() (4.8) där V() är Laplacetranformen av vt (). Överföringfunktionen från V() till Y() är då G ()e L. Vid Laplacetranformering av ett ytem med döid kan vi ålede fört tranformera ytemet utan döid, och därefter beakta döiden enligt (4.8). 4.3 Bekrivning av dynamika ytem i Laplaceplanet Bekrivning av dynamika ytem i Laplaceplanet 4 3
9 4.3.1 Överföringfunktionen Överföringfunktionen Exempel 4.. Härledning av överföringfunktionen för en kvickilvertermometer. Enligt exempel 4.1 kan en kvickilvertermometer bekriva med DE:n d T 1 (1) d t där 1 är omgivningen temperatur och är kvickilvret temperatur. Vi inför -variabler, om avvikeler från ett jämviktläge 1 1 och, dv 1 1 1, () där 1 och anger avvikelerna torlek. Inättning i ekvation (1) ger d( ) T 1 1 (3) Efterom 1 och d / 0, då är en kontant, få d ( t) T () t 1() t (4) där vi för tydlighet kull infört tidargumentet t. 4.3 Bekrivning av dynamika ytem i Laplaceplanet 4 33 Laplacetranformering av denna modell ger T() (0) () 1() (5) där 1 () () 1 () () Efterom vi använder -variabler, om anger avvikeler från begynneletilltåndet, är (0 ) 0. Vi får då T() () 1() (6) eller () G () 1() (7) där 1 G () T 1 (8) är ytemet överföringfunktion. 4.3 Bekrivning av dynamika ytem i Laplaceplanet Överföringfunktionen 4.3 Bekrivning av dynamika ytem i Laplaceplanet Övning 4.4. Ett ytem bekriv av differentialekvationen d y dy 5 6y u där u och y anger avvikeler från ett jämviktläge. Betäm ytemet överföringfunktion. 4.3 Bekrivning av dynamika ytem i Laplaceplanet Några konventioner rörande in- och utignaler Såom tidigare kontaterat få vid beräkningar i Laplaceplanet ytemet utignal genom multiplicering av de inignal med ytemet överföringfunktion inga andra termer kan ingå i uttrycket (om man har en inignal). Vid Laplacetranformering erhålle ett ådant linjärt uttryck endat om ignalerna begynnelevärden, dv dera värden vid t 0, är noll. Detta villkor uppfyll automatikt när man använder -variabler, vilka anger avvikeler från ett referentilltånd om gäller vid tidpunkten t 0, dv när man närmar ig noll från negativa idan. 0 har betydele ifall funktionen är dikontinuerlig vid t 0. Efterom det är ett ofrånkomligt krav vid beräkningar med överföringfunktioner att ignalerna har ovannämnda egenkap, ane det vara underförtått att å är fallet även om det inte kulle omnämna. Därmed kan man, om i övning 4.4, utelämna ymbolen för att förenkla beteckningarna. Om -variabler med ymbolen använd, är det ofta för att betona ignalerna fyikalika anknytning. I ådana fall är ymbolen utan ofta upptagen för att beteckna verkliga fyikalika variabler, t.ex. mätvärden i proceen. 4. Laplacetranformmetoder 4 36
 och dera Laplacetranformer med motvarande tora boktäver (veraler).")



10 4.3. Några konventioner rörande inoch utignaler 4.3 Bekrivning av dynamika ytem i Laplaceplanet Det rekommendera att man betecknar tidfunktioner med må boktäver (gemena) och dera Laplacetranformer med motvarande tora boktäver (veraler). I brit på lediga ymboler är det dock inte ovanligt att man larvar med detta och använder amma ymbol både för tidfunktionen och de Laplacetranform. Detta är möjligt för att det vanligtvi är klart av ammanhanget vilken funktiontyp det är frågan om. Till exempel vid beräkningar med överföringfunktioner är det klart att ignalerna Laplacetranformer använd. Om rik för miförtånd föreligger, kan man inkludera argumentet t eller för att ange funktiontypen. När man t.ex. gör en Laplacetranformering kan denna ditinktion behöva om man använder amma ymbol för tidfunktionen och de Laplacetranform. Det bör även obervera att både ignalerna tidfunktioner och dera Laplacetranformer i allmänhet har en enhet. Operationer både i tid- och Laplaceplanet bör därmed vara dimenionriktiga. Speciellt bör obervera att förtärkningen för ett ytem inte är dimenionlö om in- och utignalen har olika enheter. 4.3 Bekrivning av dynamika ytem i Laplaceplanet Blockcheman Vi har redan kommit i kontakt med reglerteknika blockcheman i kapitel. I detta avnitt ge en utförligare behandling av typika blockchemakomponenter och - konfigurationer amt vilka räkneoperationer de motvarar i Laplaceplanet. Ett linjärt dynamikt ytem med inignalen ut, () utignalen yt () och överföringfunktionen G () kan repreentera grafikt med hjälp av ett blockchema enligt figur 4.6. Figur 4.6. Blockcheman för dynamikt ytem. Om man namnger ignalerna i blockchemat kan man använda ignalerna tidplanymboler, åom till vänter i figuren, eller ymboler för ignalerna Laplacetranformer, åom till höger i figuren. Oberoende av vilken form om använd, gäller ambandet Y() G() U() (4.9) dv överföringfunktionen opererar på ignalerna Laplacetranformer, inte på dera tidfunktioner (åom överföringoperatorn G (p)). 4. Laplacetranformmetoder Blockcheman Blockcheman Man kan med ett blockchema åkådligt via hur ett dynamikt ytem bygg upp av mindre delytem. Viktiga element i ådana blockcheman är kontruktioner om bekriver ummation, jämförele och förgrening av ignaler. Såom framgår innebär Figur 4.7. Tre olika ätt att beteckna ummation. en jämförele en ubtraktion. Ob. att en förgrening endat flerfaldigar en ignal, den förändrar Figur 4.8. Tre olika ätt att beteckna jämförele. inte ignalen. I figurerna använd ignalerna tidfunktioner, men amma räkneregler gäller för ignalerna Laplacetranformer. Kontruktionerna kan givetvi generaliera å att fler än två ignaler beakta. Figur 4.9. Förgrening. 4.3 Bekrivning av dynamika ytem i Laplaceplanet 4 39 Seriekoppling Ett ofta förekommande arrangemang av delytem är eriekoppling eller kakadkoppling, om illutrera i figur Av ekvation (4.9) följer Y() G() X() G() G1() U() dv G () G() G1() (4.30) om är överföringfunktionen för det ammanatta ytemet inom den treckade konturen i figur Figur Seriekoppling. 4.3 Bekrivning av dynamika ytem i Laplaceplanet 4 40
 Y1() Y() G1() U() G() U() G1() G() U() dv G () G1() G() (4.31) om är överföringfunktionen för en parallellkoppling. Figur 4.")
 1 GH ( ) ( ) om är det lutna ytemet överföringfunktion. Produkten GH () () kalla ytemet kretöverföring. Ekvationen 1 GH ( ) ( ) 0 är ytemet karakteritika ekvation. Figur 4.")


11 4.3.3 Blockcheman Blockcheman Parallellkoppling En annan ytemtruktur är parallellkoppling, om illutrera i figur Denna innehåller både en förgrening och en ummation. Elementär algebra ger Y() Y1() Y() G1() U() G() U() G1() G() U() dv G () G1() G() (4.31) om är överföringfunktionen för en parallellkoppling. Figur Parallellkoppling. 4.3 Bekrivning av dynamika ytem i Laplaceplanet 4 41 Återkoppling Den met fundamentala ytemtrukturen inom en är (negativ) återkoppling, om illutrera i figur 4.1. När överföringfunktionen i framriktningen beteckna G () och överföringfunktionen i återkopplingen beteckna H() få G () Y () GE () () G () R () HY () () R () 1 GH ( ) ( ) dv G () G () (4.3) 1 GH ( ) ( ) om är det lutna ytemet överföringfunktion. Produkten GH () () kalla ytemet kretöverföring. Ekvationen 1 GH ( ) ( ) 0 är ytemet karakteritika ekvation. Figur 4.1. Återkoppling. 4.3 Bekrivning av dynamika ytem i Laplaceplanet Blockcheman 4. Laplacetranformmetoder Övning 4.5. Härled överföringfunktionen från u till y i nedantående blockchema. Figur Blockchema för ammanatt ytem. 4.3 Bekrivning av dynamika ytem i Laplaceplanet Löning av differentialekvationer Ett behändigt ätt att löa linjära ordinära differentialekvationer är att använda Laplacetranformmetoder. När differentialekvationen Laplacetranformerat term för term, med beaktande av initialtilltånd, kan Laplacetranformen för den beroende variabeln, dv utignalen, enkelt löa ut med rent algebraika metoder. Om differentialekvationen bekriver ett dynamikt ytem, har den en inignal om ockå tranformera. Tidfunktionen för den beroende variabeln kan edan erhålla genom invertranformering av de Laplacetranform. Figur Arbetgång vid löning av differentialekvationer via Laplacetranformering. INITIALPROBLEM (i tidplanet) LÖSNING (i tidplanet) Laplacetranformering Inver Laplacetranformering Algebraika operationer i Laplaceplanet TRANSFORMERAT PROBLEM (i Laplaceplanet) LÖSNING (i Laplaceplanet) Reglerteknik I Grundkur (419300) 4 44
12 4.4 Löning av differentialekvationer 4.4 Löning av differentialekvationer Tabeller över Laplacetranformer och motvarande tidfunktioner kan utnyttja åväl vid jälva Laplacetranformeringen om vid invertranformeringen. Ifall tabellen inte upptar Laplacetranformen ifråga, kan man genom partialbråkuppdelning vanligtvi kriva den om en umma av enklare tranformer var tidfunktioner finn i tabellen. Enligt uperpoitionaten (e avnitt 4..3) få den ökta tidfunktionen då om umman av de enklare Laplacetranformerna tidfunktioner Begynnelevärdeproblem Efterom Laplacetranformen av en tidfunktion innehåller tidfunktionen begynnelevärde, är Laplacetranformen peciellt lämpad för löning av begynnelevärdeproblem (initialvärdeproblem). Exempel 4.3. Löning av linjär differentialekvation med begynnelevillkor. Lö differentialekvationen y5y 6y 1med begynnelevillkoren y(0 ) 0, y (0 ) 1. Laplacetranformering ger med uttnyttjande av deriveringaterna (4.15) och (4.16) Y ( ) y(0 ) y (0 ) 5 Y ( ) y(0 ) 6 Y ( ) 1 (1) Inättning av begynnelevillkoren ger efter hyfning 1 1 Y() () ( 56) ( )( 3) 4. Laplacetranformmetoder Laplacetranformmetoder Begynnelevärdeproblem 4.4 Löning av differentialekvationer Detta uttryck finn inte i kompendiet Laplacetranformtabell, men vi kan eparera täljaren termer och efter hyfning kriva 1 1 Y() (3) ( )( 3) ( )( 3) Dea termer finn om punkt 17 och 18 i tabellen med a och b 3. I enlighet med uperpoitionaten kan vi invertranformera termerna var för ig och ummera reultatet för att få tidfunktionen yt. () Reultatet blir 1 t 3t 1 1 t 1 3t 1 t 3t 1 yt () e e e e e e 3 3 ( 3) 3( 3) (4) 3 6 Kontroll genom derivering och inättning i differentialekvationen och begynnelevillkoren viar att löningen är korrekt. 4.4 Löning av differentialekvationer Tidvaret för ett dynamikt ytem Tidvaret för ett dynamikt ytem kan betämma genom invertranformering när ytemet överföringfunktion och inignalen Laplacetranform är kända. Exempel 4.4. Stegvaret för ett förta ordningen ytem. Ett linjärt förta ordningen ytem med inignalen u och utignalen y kan bekriva med differentialekvationen dy T y Ku (1) där K är ytemet (tatika) förtärkning och T de tidkontant. Om u 0 å är y 0 en löning till DE:n. Vi kan anta att detta tilltånd råder vid t 0. Laplacetranformering ger då Y() G() U() () K där G () (3) T1 är ytemet överföringfunktion. 4. Laplacetranformmetoder 4 48
13 4.4. Tidvaret för ett dynamikt ytem 4.4. Tidvaret för ett dynamikt ytem Om inignalen förändra tegformigt från 0 till uteg vid t 0, dv om ut () 0, t 0; ut () uteg, t 0 (4) å är detta teg u teg gånger å tort om ett enhetteg och har enligt avnitt 4.. (eller punkt 1 i kompendiet Laplacetranformtabell) Laplacetranformen uteg U() (5) Inättning av G () och U() i ekvation () ger Kuteg Kuteg () / T Y (6) ( T1) ( 1/ T) Enligt punkt 9 eller 6 i Laplacetranformtabellen är motvarande tidfunktion / yt () Kuteg 1 e t T (7) Det härledda tegvaret har givetvi amma form om tegvaret för kvickilvertermometern om härledde genom direkt löning av differentialekvationen i exempel Löning av differentialekvationer 4 49 Övning 4.6. Betäm enhettegvaret (dv varet när inignalen är en tegförändring av torleken 1) för ytemet i övning Löning av differentialekvationer 4 50 Reglerteknik I/ KEH 4.4 Löning av differentialekvationer Partialbråkuppdelning Partialbråkuppdelning Laplacetranformen för en tidfunktion f () t, t.ex. den beroende variabeln i en differentialekvation med given inignal och givna begynnelevärden, kan vanligtvi kriva i formen m m1 b 0 b 1 bm1bm B () F () (4.33) n n1 a1 an1an A() För en Laplacetranform Y() innehållande en döid L, å att Y() F()e L, kan man fört betämma f () t från F() och därefter yt () f( t L) enligt förkjutningaten. Den mot Laplacetranformen F() varande tidfunktionen f () t kan man ofta finna direkt i tabellverk eller, om i exempel 4.3, efter en enkel eparering av täljaren termer i enlighet med uperpoitionprincipen. Om detta inte hjälper, kan man göra en partialbråkuppdelning. Vid partialbråkuppdelning av ekvation (4.33) gör man på följande ätt: Fört underök om täljaren graal m är mindre än nämnaren graal n. I praktiken gäller å gott om alltid att m n, dv att ytemet är trikt propert. Skulle å inte vara fallet dividera täljarpolynomet med nämnarpolynomet å att ett nytt täljarpolynom erhålle med lägre graal än nämnaren. Genom en ådan polynomdiviion kan Laplacetranformen kriva B0 () F () F0 () (4.34) A() där A() är amma nämnarpolynom om i ekvation (4.33) och B 0 () är ett polynom med lägre graal än A(). I fortättningen anta därför m0 n. Enligt uperpoitionaten kan polynomet F 0 () invertranformera kilt för ig och den reulterande tidfunktionen f 0 () t addera till reten av löningen. Efterom F 0 () aknar nämnare, kommer f 0 () t att betå av en eller flera termer motvarande en impul och tidderivator av impuler. Speciellt det enare är ovanligt i praktiken. 4. Laplacetranformmetoder Löning av differentialekvationer 4 5
14 4.4.3 Partialbråkuppdelning Partialbråkuppdelning Exempel 4.5. Polynomdiviion. Betraka den rationella funktionen 3 4 F (). 3 (1) Den kan med hjälp av polynomdiviion kriva på formen (4.34). Om vi använder den klaika diviionupptällningen (andra upptällningar är liggande tolen och trappan ) er proceduren ut på följande ätt. 3 B () 43 A () F0 ( ) B ( ) 4.4 Löning av differentialekvationer Reultatet är ålede 5 F () 3 () 3 Ekvationerna (4.15) och (4.16) amt punkterna 6 och 8 i Laplacetranformtabellen ger tidfunktionen d ( t) d ( t) 3t f() t 3 () t 5e (3) där () t är enhetimpulen. 4.4 Löning av differentialekvationer Partialbråkuppdelning Partialbråkuppdelning Faktoriering Näta teg är att faktoriera polynomet A() enligt A() ( p1)( p) ( p n ) (4.35) där p k, k 1,,, n, är de n tycken reella och komplexa rötterna till den karakteritika ekvationen A() 0. Om rötterna p k är ditinkta (alla rötter är olika tora) och reella kan F() kriva om n Ck F () F0 () (4.36) k 1 pk där C k, k 1,,, n, är kontanter om bör betämma. Ifall karakteritika ekvationen har multipla (lika tora) reella rötter kan F() kriva r n Ck Ck F () F0 () k k1 ( pr ) kr1 p (4.37) k där pr pk, k 1,,, r, är r tycken lika tora rötter. I praktiken förekommer dock ällan multipla rötter. 4.4 Löning av differentialekvationer 4 55 Ifall komplexa rötter förekommer uppträder dea om komplexkonjugerade rotpar p j, där j 1 är den imaginära enheten. Vid faktorieringen av A() kan ett ådant rotpar ammanlå till faktorn ( ). En term C 1 C ( ) bör då inkludera i partialbråkuppdelningen av F(). Ifall pn 1 och p n är ett komplexkonjugerat rotpar och rötterna p k, k 1,, r, är multipla och reella ( pr ) amt reten av rötterna är ditinkta och reella, få r n Ck Ck Cn1 Cn F () F0 () k k1 ( pr ) kr1 pk ( ) Multipla komplexa rötter kan även hantera, men kommer inte att behandla. Alla termer i partialbråkuppdelningen (4.38) är ådana att dera invertranformer enkelt hitta i kuren Laplacetranformtabell. Enligt uperpoitionaten är den ökta funktionen f () t umman av de enkilda invertranformerna. (4.38) 4.4 Löning av differentialekvationer 4 56
15 4.4.3 Partialbråkuppdelning Partialbråkuppdelning Betämning av kontanterna C k Kontanterna C k kan betämma på flera olika ätt. Efterom partialbråkuppdelningen bör gälla för goyckliga värden på variabeln, kan man ubtituera n tycken lämpligt valda olika värden på i partialbråkuppdelningen och betämma C k, k 1,,, n, ur de n ekvationer om upptår. En annan mera allmän metod är att förlänga partialbråkuppdelningen (dv multiplicera båda leden) med A() och därefter förkorta bort nämnaruttrycken. Det å erhållna uttrycket kall vara lika med B 0 (). Kontanterna C k kan då betämma ur de n ekvationer om upptår när man kräver att partialbråkuppdelningen kall gälla kilt för varje poten av. Ifall rötterna är ditinkta och reella betäm C k enklat enligt B0 lim ( ) () Ck pk (4.39) pk A() Obervera att faktorn ( p k ) kan förkorta bort mot motvarande faktor i A(). Exempel 4.6. Rampvaret för ett förta ordningen ytem. Vi kall betämma det å kallade rampvaret för ett förta ordningen ytem. Inignalen u är en ramp, vilket innebär att den förändra linjärt med tiden enligt ambandet ut () bt, där b är en kontant. Enligt exempel 4.4 har ett förta ordningen ytem överföringfunktionen K G () (1) T 1 För en ramp med lutningkoefficienten b gäller i enlighet med ekvation (4.9) att den har Laplacetranformen b U() () Utignalen ge då av Kb Y() G() U() ( T 1) (3) 4.4 Löning av differentialekvationer Löning av differentialekvationer Partialbråkuppdelning Partialbråkuppdelning Denna Laplacetranform finn i kuren Laplacetranformtabell, men vi kall här illutrera hur vi kan finna löningen genom partialbråkuppdelning och invertranformering av redan kända Laplacetranformer. Nämnaren i ekvation (3) är färdigt faktorierad; vi har en enkel rot 1/ T och en dubbelrot 0. I enlighet med ekvation (4.37) gör vi då partialbråkuppdelningen Kb C1 C C3 (4) ( T 1) T 1 Förlängning med ( T 1) ger Kb C1( T 1) C( T 1) C3 (5) Detta uttryck måte gälla kilt för varje poten av, vilket ger 0 : Kb C C Kb 1 : 0C1CT C1 KbT 0 : CT 1 C3 C3 KbT (6) Inättning i ekvation (4) och vidare inättning i ekvation (3) ger KbT Kb KbT Y() (7) T 1 Men hjälp av punkterna 1, och 5 i Laplacetranformtabellen få då t/ T t/ T y() t KbT Kbt KbTe Kb( t T Te ) (8) Efter att initialeffekterna dött ut, närmar ig utignalen en ramp med lutningkoefficienten Kb. Direkt tillämpning av punkt 7 i Laplacetranformtabellen ger givetvi amma var. Övning 4.7. Invertranformera följande funktioner med hjälp av partialbråkuppdelning: a) Fa (), b) F b (). ( 4) ( 65) 4.4 Löning av differentialekvationer Löning av differentialekvationer 4 60
ÖVN 15 - DIFFTRANS - DEL2 - SF Nyckelord och innehåll. Inofficiella mål
 ÖVN 5 - DIFFTRANS - DEL - SF683 HTTP://KARLJODIFFTRANS.WORDPRESS.COM KARL JONSSON Nyckelord och innehåll Laplacetranformen Differentialekvationer med dikontinuerlig drivande term g(t) Heaviide och δ-funktionen
ÖVN 5 - DIFFTRANS - DEL - SF683 HTTP://KARLJODIFFTRANS.WORDPRESS.COM KARL JONSSON Nyckelord och innehåll Laplacetranformen Differentialekvationer med dikontinuerlig drivande term g(t) Heaviide och δ-funktionen
4. Laplacetransformmetoder
 4. Laplacetransformmetoder 4. Laplacetransformmetoder 4.1 Differentialekvationer Differentialekvationer utgör grunden för en matematisk beskrivning av dynamiska system i kontinuerlig tid beskriver hur
4. Laplacetransformmetoder 4. Laplacetransformmetoder 4.1 Differentialekvationer Differentialekvationer utgör grunden för en matematisk beskrivning av dynamiska system i kontinuerlig tid beskriver hur
Lösningar till tentamen i Reglerteknik
 Löningar till tentamen i Reglerteknik Tentamendatum: 8 Juni 205. (a) Välj t.ex. tyrbar kanonik form 5 4 3 ẋ(t) = 0 0 x(t) + 0 u(t) 0 0 0 y(t) = ( 0 ) x(t) (b) Stabilt ytem och tationär förtärkning G(0)
Löningar till tentamen i Reglerteknik Tentamendatum: 8 Juni 205. (a) Välj t.ex. tyrbar kanonik form 5 4 3 ẋ(t) = 0 0 x(t) + 0 u(t) 0 0 0 y(t) = ( 0 ) x(t) (b) Stabilt ytem och tationär förtärkning G(0)
AB2.9: Heavisides stegfunktion. Diracs deltafunktion
 AB29: Heaviide tegfunktion Dirac deltafunktion Heaviide tegfunktion Heaviide tegfunktion definiera ut a) = { if t < a, if t > a Betrakta via exempel: ft) = 5 in t ft)ut 2) ft 2)ut 2) k[ut ) 2ut 4) + ut
AB29: Heaviide tegfunktion Dirac deltafunktion Heaviide tegfunktion Heaviide tegfunktion definiera ut a) = { if t < a, if t > a Betrakta via exempel: ft) = 5 in t ft)ut 2) ft 2)ut 2) k[ut ) 2ut 4) + ut
Lösningsförslag till tentamen i TSRT19 Reglerteknik Tentamensdatum: Svante Gunnarsson
 Löningförlag till tentamen i TSRT9 Reglerteknik Tentamendatum: 207-0-03 Svante Gunnaron. (a) Styrignaler: Gapådrag, rattvinkel Utignaler: Hatighet, poition på vägbanan Störignaler: Vind, uppför-/nedförbackar
Löningförlag till tentamen i TSRT9 Reglerteknik Tentamendatum: 207-0-03 Svante Gunnaron. (a) Styrignaler: Gapådrag, rattvinkel Utignaler: Hatighet, poition på vägbanan Störignaler: Vind, uppför-/nedförbackar
ω L[cos(ωt)](s) = s 2 +ω 2 L[sin(ωt)](s) =
 = s 2 +ω 2 L[sin(ωt)](s) =](/thumbs/93/112784770.jpg "ω L[cos(ωt)](s) = s 2 +ω 2 L[sin(ωt)](s) =") Matematik Chalmer Tentamen i TMA683/TMA682 Tillämpad matematik K2/Bt2, 28 4 4, kl 4:-8: Telefon: Henrik Imberg, 3-772 5325; Kontaktperon: Mohammad Aadzadeh, 3-772 357 Hjälpmedel: Endat tabell på bakidan
Matematik Chalmer Tentamen i TMA683/TMA682 Tillämpad matematik K2/Bt2, 28 4 4, kl 4:-8: Telefon: Henrik Imberg, 3-772 5325; Kontaktperon: Mohammad Aadzadeh, 3-772 357 Hjälpmedel: Endat tabell på bakidan
Läs i vågläraboken om interferens (sid 59-71), dopplereffekt (sid 81-84), elektromagnetiska vågor (sid 177-181) och dikroism (sid 413-415).
, dopplereffekt (sid 81-84), elektromagnetiska vågor (sid 177-181) och dikroism (sid 413-415).") Dopplerradar Förberedeler Lä i vågläraboken om interferen (id 59-71), dopplereffekt (id 81-84), elektromagnetika vågor (id 177-181) och dikroim (id 413-415). Lä igenom hela laborationintruktionen. Gör
Dopplerradar Förberedeler Lä i vågläraboken om interferen (id 59-71), dopplereffekt (id 81-84), elektromagnetika vågor (id 177-181) och dikroim (id 413-415). Lä igenom hela laborationintruktionen. Gör
Läs i vågläraboken om interferens (sid 59-71), dopplereffekt (sid 81-84), elektromagnetiska vågor (sid 177-181) och dikroism (sid 413-415).
, dopplereffekt (sid 81-84), elektromagnetiska vågor (sid 177-181) och dikroism (sid 413-415).") Dopplerradar Förberedeler Lä i vågläraboken om interferen (id 59-71), dopplereffekt (id 81-84), elektromagnetika vågor (id 177-181) och dikroim (id 413-415). Lä igenom hela laborationintruktionen. Gör
Dopplerradar Förberedeler Lä i vågläraboken om interferen (id 59-71), dopplereffekt (id 81-84), elektromagnetika vågor (id 177-181) och dikroim (id 413-415). Lä igenom hela laborationintruktionen. Gör
1. Använd Laplacetransformen för att lösa differentialekvationen (5p) y (t) y(t) = sin 2t, t > 0 y(0) = 1
 y (t) y(t) = sin 2t, t > 0 y(0) = 1") Matematik Chalmer Tentamen i TMA683/TMA68 Tillämpad matematik K/Bt, 7 4, kl 8:3-:3 Telefon: Maximilian Thaller, 3-77 535 Hjälpmedel: Endat tabell på bakidan av teen. Kalkylator ej tillåten. Betyggräner,
Matematik Chalmer Tentamen i TMA683/TMA68 Tillämpad matematik K/Bt, 7 4, kl 8:3-:3 Telefon: Maximilian Thaller, 3-77 535 Hjälpmedel: Endat tabell på bakidan av teen. Kalkylator ej tillåten. Betyggräner,
1. Använd Laplacetransformen för att lösa differentialekvationen (5p) y (t) + 3y (t) + 2y(t) = 1, t > 0 y(0) = 1, y (0) = 1
 y (t) + 3y (t) + 2y(t) = 1, t > 0 y(0) = 1, y (0) = 1") Matematik Calmer Tentamen i TMA68/TMA68 Tillämpad matematik K/Bt, 7 8 7, kl 4:-8: Telefon: Olof Gielon, -77 55 Hjälpmedel: Endat tabell på bakidan av teen. Kalkylator ej tillåten. Betyggräner, : -7p, 4:
Matematik Calmer Tentamen i TMA68/TMA68 Tillämpad matematik K/Bt, 7 8 7, kl 4:-8: Telefon: Olof Gielon, -77 55 Hjälpmedel: Endat tabell på bakidan av teen. Kalkylator ej tillåten. Betyggräner, : -7p, 4:
4. Laplacetransformmetoder
 4. Laplacetransformmetoder 4. Laplacetransformmetoder 4.1 Differentialekvationer Differentialekvationer utgör grunden för en matematisk beskrivning av dynamiska system i kontinuerlig tid beskriver hur
4. Laplacetransformmetoder 4. Laplacetransformmetoder 4.1 Differentialekvationer Differentialekvationer utgör grunden för en matematisk beskrivning av dynamiska system i kontinuerlig tid beskriver hur
REGLERTEKNIK. Formelsamling
 REGLERTEKNIK Formelamling Intitutionen för reglerteknik Lund teknika högkola Juni 27 2 Matriteori Beteckningar Matri av ordning m x n a a 2 a n a 2 a 22 a 2n A =. a m a m2 a mn Vektor med dimenion n x
REGLERTEKNIK Formelamling Intitutionen för reglerteknik Lund teknika högkola Juni 27 2 Matriteori Beteckningar Matri av ordning m x n a a 2 a n a 2 a 22 a 2n A =. a m a m2 a mn Vektor med dimenion n x
Föreläsning 7: Stabilitetsmarginaler. Föreläsning 7. Stabilitet är viktigt! Förra veckan. Stabilitetsmarginaler. Extra fördröjning i loopen?
 Föreläning 7 Föreläning 7: Känlighetfunktionen och Stationära fel 4 Februari, 29. 2. Standardkreten 3. Känlighetfunktion Förra veckan Stabilitet är viktigt! yquitkriteriet Im G(iω) Amplitud- och famarginal
Föreläning 7 Föreläning 7: Känlighetfunktionen och Stationära fel 4 Februari, 29. 2. Standardkreten 3. Känlighetfunktion Förra veckan Stabilitet är viktigt! yquitkriteriet Im G(iω) Amplitud- och famarginal
Tentamen: Lösningsförslag
 Tentamen: Löningförlag Fredag 8 juni 8 8:-3: SF74 Flervariabelanaly Inga hjälpmedel är tillåtna Ma: 4 poäng (4 poäng Rita följande mängder i R : (a A {(, y R ma(, y } (b B {(, y R + y 4 4 4y y } (c C {(,
Tentamen: Löningförlag Fredag 8 juni 8 8:-3: SF74 Flervariabelanaly Inga hjälpmedel är tillåtna Ma: 4 poäng (4 poäng Rita följande mängder i R : (a A {(, y R ma(, y } (b B {(, y R + y 4 4 4y y } (c C {(,
7. Låt f(x) vara en 2π-periodisk, integrerbar funktion. Visa noggrant att om
 vara en 2π-periodisk, integrerbar funktion. Visa noggrant att om") Matematik Chalmer Tentamen i TMA68 Tillämpad matematik K/Bt, 4 8 ; KL 4:-8: Telefon: Mohammad Aadzadeh: 73-8834. Hjälpmedel: Endat utdelad (vänd textlappen) tabell. Kalkylator ej tillåten. Uppgifterna
Matematik Chalmer Tentamen i TMA68 Tillämpad matematik K/Bt, 4 8 ; KL 4:-8: Telefon: Mohammad Aadzadeh: 73-8834. Hjälpmedel: Endat utdelad (vänd textlappen) tabell. Kalkylator ej tillåten. Uppgifterna
SIMULINK. Introduktion till. Grunderna...2. Tidskontinuerliga Reglersystem. 6. Uppgift Appendix A. Symboler 14
 Intitutionen för Tillämpad Fyik och elektronik Umeå Univeritet BE Verion: 02-03-09 TFEA3 Introduktion till SIMULINK Grunderna....2 Tidkontinuerliga Reglerytem. 6 Uppgift.. 3 Appendix A. Symboler 4 Introduktion
Intitutionen för Tillämpad Fyik och elektronik Umeå Univeritet BE Verion: 02-03-09 TFEA3 Introduktion till SIMULINK Grunderna....2 Tidkontinuerliga Reglerytem. 6 Uppgift.. 3 Appendix A. Symboler 4 Introduktion
Reglerteknik 5. Kapitel 9. Köp bok och övningshäfte på kårbokhandeln. William Sandqvist
 Reglerteknik 5 Kapitel 9 Köp bok och övninghäfte på kårbokhandeln Föreläning 5 kap 9 Frekvenanaly Sinuformade ignaler i linjära ytem amma frekven Ain t G Bin t ϕ annan amplitud annan favinkel G och Gj
Reglerteknik 5 Kapitel 9 Köp bok och övninghäfte på kårbokhandeln Föreläning 5 kap 9 Frekvenanaly Sinuformade ignaler i linjära ytem amma frekven Ain t G Bin t ϕ annan amplitud annan favinkel G och Gj
TENTAMEN: DEL B Reglerteknik I 5hp
 TENTAMEN: DEL B Reglerteknik I 5hp Tid: Tordag 3 oktober 04, kl. 3.00-6.00 Plat: Fyrilundgatan 80, Sal Anvarig lärare: Kjartan Halvoren, tel. 073-776 090. Tillåtna hjälpmedel: Kurboken (Glad-Ljung), miniräknare,
TENTAMEN: DEL B Reglerteknik I 5hp Tid: Tordag 3 oktober 04, kl. 3.00-6.00 Plat: Fyrilundgatan 80, Sal Anvarig lärare: Kjartan Halvoren, tel. 073-776 090. Tillåtna hjälpmedel: Kurboken (Glad-Ljung), miniräknare,
ÖVN 2 - DIFFERENTIALEKVATIONER OCH TRANSFORMMETODER - SF1683. Inofficiella mål
 ÖVN 2 - DIFFERENTIALEKVATIONER OCH TRANSFORMMETODER - SF1683 KARL JONSSON Nyckelord och innehåll Andra ordningens linjära differentialekvationer Homogena ekvationen Fundamental lösningsmängd, y 1 (t),
ÖVN 2 - DIFFERENTIALEKVATIONER OCH TRANSFORMMETODER - SF1683 KARL JONSSON Nyckelord och innehåll Andra ordningens linjära differentialekvationer Homogena ekvationen Fundamental lösningsmängd, y 1 (t),
TSRT09 Reglerteori. Sammanfattning av Föreläsning 4. Sammanfattning av Föreläsning 4, forts. Sammanfattning av Föreläsning 4, forts.
 Reglerteori 217, Föreläning 5 Daniel Axehill 1 / 28 Sammanfattning av Föreläning 4 TSRT9 Reglerteori Föreläning 5: Regulatortrukturer och reglerprinciper Daniel Axehill Reglerteknik, ISY, Linköping Univeritet
Reglerteori 217, Föreläning 5 Daniel Axehill 1 / 28 Sammanfattning av Föreläning 4 TSRT9 Reglerteori Föreläning 5: Regulatortrukturer och reglerprinciper Daniel Axehill Reglerteknik, ISY, Linköping Univeritet
Kalibrering. Dagens föreläsning. När behöver man inte kalibrera? Varför kalibrera? Ex på kalibrering. Linjär regression (komp 5)
") Dagen föreläning Kalibrering Kemik mätteknik CSL Analytik kemi Inledning. Linjär regreion Olika typer av tandarder. Vilken typ av kalibrering till vilken analymetod? Något om pårbarhet. Varför kalibrera?
Dagen föreläning Kalibrering Kemik mätteknik CSL Analytik kemi Inledning. Linjär regreion Olika typer av tandarder. Vilken typ av kalibrering till vilken analymetod? Något om pårbarhet. Varför kalibrera?
Optimering Linjär programmering
 Optimering Linjär programmering Ett optimeringprolem etår av: En målfunktion, f(), var maimum, eller minimum ka öka. En eller flera -varialer (elutvarialer om man tr över). Eventuellt ockå ett antal ivillkor
Optimering Linjär programmering Ett optimeringprolem etår av: En målfunktion, f(), var maimum, eller minimum ka öka. En eller flera -varialer (elutvarialer om man tr över). Eventuellt ockå ett antal ivillkor
Massa, densitet och hastighet
 Detta är en något omarbetad verion av Studiehandledningen om använde i tryckta kuren på SSVN. Sidhänviningar hänför ig till Quanta A 000, ISBN 91-7-60500-0 Där det har varit möjligt har motvarande aker
Detta är en något omarbetad verion av Studiehandledningen om använde i tryckta kuren på SSVN. Sidhänviningar hänför ig till Quanta A 000, ISBN 91-7-60500-0 Där det har varit möjligt har motvarande aker
SIMULINK. Grunderna. Introduktion till
 Introduktion till SIMULINK Intitutionen för Tillämpad Fyik och elektronik Umeå Univeritet Verion: / - Reglerytem BE Grunderna Introduktion till Starta MATLAB - Välj i förta hand den Matlab om finn lokalt
Introduktion till SIMULINK Intitutionen för Tillämpad Fyik och elektronik Umeå Univeritet Verion: / - Reglerytem BE Grunderna Introduktion till Starta MATLAB - Välj i förta hand den Matlab om finn lokalt
2. Optimering Linjär programmering
 . Optimering Linjär programmering Ett optimeringprolem etår av: En målfunktion, f(), var maimum, eller minimum ka öka. En eller flera -varialer (elutvarialer om man tr över). Normalt okå ett antal ivillkor
. Optimering Linjär programmering Ett optimeringprolem etår av: En målfunktion, f(), var maimum, eller minimum ka öka. En eller flera -varialer (elutvarialer om man tr över). Normalt okå ett antal ivillkor
6. Stabilitet. 6. Stabilitet. 6. Stabilitet. 6.1 Stabilitetsdefinitioner. 6. Stabilitet. 6.2 Poler och stabilitet. 6.1 Stabilitetsdefinitioner
 Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt kan bli instabilt genom för
Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt kan bli instabilt genom för
Digital signalbehandling Sampling och vikning
 Intitutionen ör data- och elektroteknik Digital ignalbehandling --9 Sampling Då vi tuderar en vanlig analog ignal, t ex med hjälp av ett (analogt) ocillokop, å kan vi vid varje tidpunkt regitrera hur ignalen
Intitutionen ör data- och elektroteknik Digital ignalbehandling --9 Sampling Då vi tuderar en vanlig analog ignal, t ex med hjälp av ett (analogt) ocillokop, å kan vi vid varje tidpunkt regitrera hur ignalen
6. Stabilitet. 6. Stabilitet
 6. Stabilitet 6. Stabilitet Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt
6. Stabilitet 6. Stabilitet Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt
ökar arbetslösheten i alla länder, men i USA sker tilbakagången snabbare
 Europeik arbetlöhet numera generellt högre än i USA. Vid lågkonjunktur ökar arbetlöheten i alla länder, men i USA ker tilbakagången nabbare än i typikt Europeikt land. Från att ha legat på en tabil, internationellt
Europeik arbetlöhet numera generellt högre än i USA. Vid lågkonjunktur ökar arbetlöheten i alla länder, men i USA ker tilbakagången nabbare än i typikt Europeikt land. Från att ha legat på en tabil, internationellt
TEKNISKA FAKULTETEN Adress: Åbo Telefon: WWW: PROCESSDYNAMIK. a v. Tore Gustafsson
 Åbo Akademi EKNISKA FAKULEEN Adre: 5 Åbo eleon: -5 3 WWW: http://www.abo.i/ PROCESSDYNAMIK a v ore Gtaon E-pot: ore.gtaon@abo.i 8 redje pplagan,..8 Copyright ore Gtaon 8 3 Innehållörtekning Förord... 5.
Åbo Akademi EKNISKA FAKULEEN Adre: 5 Åbo eleon: -5 3 WWW: http://www.abo.i/ PROCESSDYNAMIK a v ore Gtaon E-pot: ore.gtaon@abo.i 8 redje pplagan,..8 Copyright ore Gtaon 8 3 Innehållörtekning Förord... 5.
1. f är en två gånger deriverbar funktion på intervallet (a, b) och π 1 f är dess linjära interpolant. Visa att π 1 f f L (a,b) (b a) 2 f L (a,b).
 och π 1 f är dess linjära interpolant. Visa att π 1 f f L (a,b) (b a) 2 f L (a,b).") Matematik Chalmer Tentamen i TMA68 Tillämpad matematik K/Bt, ; KL 8:3-:3 Telefon: Martin Berglund: 73-883. Hjälpmedel: Endat utdelad vänd textlappen tabell. Kalkylator ej tillåten. Uppgift 7 ger max 8p,
Matematik Chalmer Tentamen i TMA68 Tillämpad matematik K/Bt, ; KL 8:3-:3 Telefon: Martin Berglund: 73-883. Hjälpmedel: Endat utdelad vänd textlappen tabell. Kalkylator ej tillåten. Uppgift 7 ger max 8p,
6. Stabilitet. 6. Stabilitet. 6. Stabilitet. 6.1 Stabilitetsdefinitioner. 6. Stabilitet. 6.2 Poler och stabilitet. 6.1 Stabilitetsdefinitioner
 Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt kan bli instabilt genom för
Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt kan bli instabilt genom för
TATM79: Föreläsning 3 Komplexa tal
 TATM79: Föreläsning 3 Komplexa tal Johan Thim 22 augusti 2018 1 Komplexa tal Definition. Det imaginära talet i uppfyller att i 2 = 1. Detta är alltså ett tal vars kvadrat är negativ. Det kan således aldrig
TATM79: Föreläsning 3 Komplexa tal Johan Thim 22 augusti 2018 1 Komplexa tal Definition. Det imaginära talet i uppfyller att i 2 = 1. Detta är alltså ett tal vars kvadrat är negativ. Det kan således aldrig
Regressionsanalys Enkel regressionsanalys Regressionslinjen
 --9 Regreionanaly - en fråga om balan Kimmo Sorjonen Sektionen för Pykologi Karolinka Intitutet. Enkel reg.analy.. Data.. Reg.linjen.. Beta (β).. Signifikan.. Reg. om Var..6. Korr. & Förklarad var..7.
--9 Regreionanaly - en fråga om balan Kimmo Sorjonen Sektionen för Pykologi Karolinka Intitutet. Enkel reg.analy.. Data.. Reg.linjen.. Beta (β).. Signifikan.. Reg. om Var..6. Korr. & Förklarad var..7.
Välkomna till TSRT15 Reglerteknik Föreläsning 2
 Välkomna till TSRT15 Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till TSRT15 Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till Reglerteknik Föreläsning 2
 Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
= y(0) 3. e t =Ce t, y = =±C 1. 4 e t.
 3. e t =Ce t, y = =±C 1. 4 e t.") Löningförlg till tentmenkrivning i SF16 Differentilekvtioner I Tidgen den 8 jnuri 1, kl 14-19 Hjälpmedel: BETA, Mthemtic Hndbook Redovi löningrn på ett ådnt ätt tt beräkningr och reonemng är lätt tt följ
Löningförlg till tentmenkrivning i SF16 Differentilekvtioner I Tidgen den 8 jnuri 1, kl 14-19 Hjälpmedel: BETA, Mthemtic Hndbook Redovi löningrn på ett ådnt ätt tt beräkningr och reonemng är lätt tt följ
TATA42: Föreläsning 8 Linjära differentialekvationer av högre ordning
 TATA42: Föreläsning 8 Linjära differentialekvationer av högre ordning Johan Thim 23 april 2018 1 Differentialoperatorer För att underlätta notation och visa på underliggande struktur introducerar vi begreppet
TATA42: Föreläsning 8 Linjära differentialekvationer av högre ordning Johan Thim 23 april 2018 1 Differentialoperatorer För att underlätta notation och visa på underliggande struktur introducerar vi begreppet
Planering för Matematik kurs E
 Planering för Matematik kurs E Läromedel: Holmström/Smedhamre, Matematik från A till E, kurs E Antal timmar: 60 (0 + 0) I nedanstående planeringsförslag tänker vi oss att E-kursen studeras på 60 klocktimmar.
Planering för Matematik kurs E Läromedel: Holmström/Smedhamre, Matematik från A till E, kurs E Antal timmar: 60 (0 + 0) I nedanstående planeringsförslag tänker vi oss att E-kursen studeras på 60 klocktimmar.
Processbeskrivning Driftsättning
 ProcIT-P-007 Procebekrivning Driftättning Ledning- och kvalitetytem Fattällt av Sven Arvidon 2012-06-20 Innehållförteckning 1 Inledning 2 1.1 Symboler i procebekrivningarna 2 2 Driftättning 3 2.1 Samband
ProcIT-P-007 Procebekrivning Driftättning Ledning- och kvalitetytem Fattällt av Sven Arvidon 2012-06-20 Innehållförteckning 1 Inledning 2 1.1 Symboler i procebekrivningarna 2 2 Driftättning 3 2.1 Samband
Sammanfattning av ordinära differentialekvationer
 Sammanfattning av ordinära differentialekvationer Joakim Edsjö 1 Institutionen för teoretisk fysik, Uppsala Universitet Telefon: 018-18 32 50 eller 018-18 76 30 19 februari 1995 1 Första ordningens differentialekvationer
Sammanfattning av ordinära differentialekvationer Joakim Edsjö 1 Institutionen för teoretisk fysik, Uppsala Universitet Telefon: 018-18 32 50 eller 018-18 76 30 19 februari 1995 1 Första ordningens differentialekvationer
DIFFERENTIALEKVATIONER. INLEDNING OCH GRUNDBEGREPP
 DIFFERENTIALEKVATIONER INLEDNING OCH GRUNDBEGREPP Differentialekvation (DE) är en ekvation som innehåller derivator av en eller flera okända funktioner ORDINÄRA DIFFERENTIALEKVATIONER i) En differentialekvation
DIFFERENTIALEKVATIONER INLEDNING OCH GRUNDBEGREPP Differentialekvation (DE) är en ekvation som innehåller derivator av en eller flera okända funktioner ORDINÄRA DIFFERENTIALEKVATIONER i) En differentialekvation
Regressionsanalys Enkel regressionsanalys Regressionslinjen
 -9-6 Regreionanaly - om en mak åt en hungrande Kimmo Sorjonen Sektionen för Pykologi Karolinka Intitutet. Enkel reg.analy.. Data.. Reg.linjen.. Beta (β).. Signifikan.. Reg. om Var..6. Korr. & Förklarad
-9-6 Regreionanaly - om en mak åt en hungrande Kimmo Sorjonen Sektionen för Pykologi Karolinka Intitutet. Enkel reg.analy.. Data.. Reg.linjen.. Beta (β).. Signifikan.. Reg. om Var..6. Korr. & Förklarad
Crash Course Envarre2- Differentialekvationer
 Crash Course Envarre2- Differentialekvationer Mattehjälpen Maj 2018 Contents 1 Introduktion 2 2 Integrerande faktor 2 3 Separabla diffekvationer 3 4 Linjära diffekvationer 4 4.1 Homogena lösningar till
Crash Course Envarre2- Differentialekvationer Mattehjälpen Maj 2018 Contents 1 Introduktion 2 2 Integrerande faktor 2 3 Separabla diffekvationer 3 4 Linjära diffekvationer 4 4.1 Homogena lösningar till
x(t) I elimeringsmetoden deriverar vi den första ekvationen och sätter in x 2(t) från den andra ekvationen:
 I elimeringsmetoden deriverar vi den första ekvationen och sätter in x 2(t) från den andra ekvationen:") Differentialekvationer II Modellsvar: Räkneövning 6 1. Lös det icke-homogena linjära DE-systemet ( ( 0 e x t (t = x(t + 1 3 e t med elimineringsmetoden. Lösning: den explicita formen av DE-systemet är
Differentialekvationer II Modellsvar: Räkneövning 6 1. Lös det icke-homogena linjära DE-systemet ( ( 0 e x t (t = x(t + 1 3 e t med elimineringsmetoden. Lösning: den explicita formen av DE-systemet är
Teori för linjära ordinära differentialkvationer med konstanta koefficienter
 Institutionen för Matematik SF1625 Envariabelanalys Läsåret 2016/2017 Teori för linjära ordinära differentialkvationer med konstanta koefficienter 1. FÖRSTA ORDNINGEN Homogena fallet. En homogen linjär
Institutionen för Matematik SF1625 Envariabelanalys Läsåret 2016/2017 Teori för linjära ordinära differentialkvationer med konstanta koefficienter 1. FÖRSTA ORDNINGEN Homogena fallet. En homogen linjär
Processbeskrivning Övervakning inom Operation Center
 ProcIT-P-016 Procebekrivning Övervakning inom Operation Center Ledning- och kvalitetytem Fattälld av Sven Arvidon 2012-09-10 Innehållförteckning 1 Inledning 3 1.1 Symboler i procebekrivningarna 3 2 Övervakning
ProcIT-P-016 Procebekrivning Övervakning inom Operation Center Ledning- och kvalitetytem Fattälld av Sven Arvidon 2012-09-10 Innehållförteckning 1 Inledning 3 1.1 Symboler i procebekrivningarna 3 2 Övervakning
TATA42: Föreläsning 7 Differentialekvationer av första ordningen och integralekvationer
 TATA42: Föreläsning 7 Differentialekvationer av första ordningen och integralekvationer Johan Thim 0 januari 207 Introduktion En differentialekvation (DE) i en variabel är en ekvation som innehåller både
TATA42: Föreläsning 7 Differentialekvationer av första ordningen och integralekvationer Johan Thim 0 januari 207 Introduktion En differentialekvation (DE) i en variabel är en ekvation som innehåller både
Laplacetransform, poler och nollställen
 Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
DIFFERENTIALEKVATIONER. INLEDNING OCH GRUNDBEGREPP
 DIFFERENTIALEKVATIONER INLEDNING OCH GRUNDBEGREPP Differentialekvation (DE) är en ekvation som innehåller derivator av en eller flera okända funktioner ORDINÄRA DIFFERENTIALEKVATIONER i) En differentialekvation
DIFFERENTIALEKVATIONER INLEDNING OCH GRUNDBEGREPP Differentialekvation (DE) är en ekvation som innehåller derivator av en eller flera okända funktioner ORDINÄRA DIFFERENTIALEKVATIONER i) En differentialekvation
För att uttrycka den primitiva funktionen i den ursprungliga variabeln sätter vi in θ = arcsin 2x. Lektion 14, Envariabelanalys den 23 november 1999
 Lektion 4, Envariabelanalys den november 999 6.. Beräkna d 4. Det första vi observerar i integralen är uttrycket i nämnaren, 4. När ett uttryck av den här typen förekommer i en rationell integrand kan
Lektion 4, Envariabelanalys den november 999 6.. Beräkna d 4. Det första vi observerar i integralen är uttrycket i nämnaren, 4. När ett uttryck av den här typen förekommer i en rationell integrand kan
TATA42: Föreläsning 9 Linjära differentialekvationer av ännu högre ordning
 TATA42: Föreläsning 9 Linjära differentialekvationer av ännu högre ordning Johan Thim 4 mars 2018 1 Linjära DE av godtycklig ordning med konstanta koefficienter Vi kommer nu att betrakta linjära differentialekvationer
TATA42: Föreläsning 9 Linjära differentialekvationer av ännu högre ordning Johan Thim 4 mars 2018 1 Linjära DE av godtycklig ordning med konstanta koefficienter Vi kommer nu att betrakta linjära differentialekvationer
= = i K = 0, K =
 ösningsförslag till tentamensskrivning i SF1633, Differentialekvationer I Tisdagen den 14 augusti 212, kl 14-19 Hjälpmedel: BETA, Mathematics Handbook Redovisa lösningarna på ett sådant sätt att beräkningar
ösningsförslag till tentamensskrivning i SF1633, Differentialekvationer I Tisdagen den 14 augusti 212, kl 14-19 Hjälpmedel: BETA, Mathematics Handbook Redovisa lösningarna på ett sådant sätt att beräkningar
DIFFERENTIALEKVATIONER. INLEDNING OCH GRUNDBEGREPP
 Armin Halilovic: EXTRA ÖVNINGAR DIFFERENTIALEKVATIONER. INLEDNING OCH GRUNDBEGREPP Differentialekvation (DE) är en ekvation som innehåller derivator av en eller flera okända funktioner. ORDINÄRA DIFFERENTIALEKVATIONER
Armin Halilovic: EXTRA ÖVNINGAR DIFFERENTIALEKVATIONER. INLEDNING OCH GRUNDBEGREPP Differentialekvation (DE) är en ekvation som innehåller derivator av en eller flera okända funktioner. ORDINÄRA DIFFERENTIALEKVATIONER
DIFFERENTIALEKVATIONER. INLEDNING OCH GRUNDBEGREPP
 DIFFERENTIALEKVATIONER INLEDNING OCH GRUNDBEGREPP Differentialekvation (DE) är en ekvation som innehåller derivator av en eller flera okända funktioner ORDINÄRA DIFFERENTIAL EKVATIONER i) En differentialekvation
DIFFERENTIALEKVATIONER INLEDNING OCH GRUNDBEGREPP Differentialekvation (DE) är en ekvation som innehåller derivator av en eller flera okända funktioner ORDINÄRA DIFFERENTIAL EKVATIONER i) En differentialekvation
PTG 2015 Övning 5. Problem 1
 PTG 05 Övning 5 Problem En tvättvamp om tillverkat av ett polymermaterial med deniteten ρ p = 800 kg/m 3 har deniteten ρ p = 640 kg/m 3, då poroiteten (öppna ytan) är 0 %. Svampenärenkubmedmåtten0cm 0cm
PTG 05 Övning 5 Problem En tvättvamp om tillverkat av ett polymermaterial med deniteten ρ p = 800 kg/m 3 har deniteten ρ p = 640 kg/m 3, då poroiteten (öppna ytan) är 0 %. Svampenärenkubmedmåtten0cm 0cm
Vektorgeometri för gymnasister
 Vektorgeometri för gymnasister Per-Anders Svensson http://homepage.lnu.se/staff/psvmsi/vektorgeometri/gymnasiet.html Fakulteten för teknik Linnéuniversitetet 27 augusti 2013 Innehåll Linjära ekvationssystem
Vektorgeometri för gymnasister Per-Anders Svensson http://homepage.lnu.se/staff/psvmsi/vektorgeometri/gymnasiet.html Fakulteten för teknik Linnéuniversitetet 27 augusti 2013 Innehåll Linjära ekvationssystem
SVAR: Det är modell 1 som är rimlig för en avsvalningsprocess. Föremålets temperatur efter lång tid är 20 grader Celsius.
 Lösningsförslag till tentamensskrivning i SF633 Differentialekvationer I Onsdagen den maj 03, kl 0800-300 Hjälpmedel: BETA, Mathematics Handbook Redovisa lösningarna på ett sådant sätt att beräkningar
Lösningsförslag till tentamensskrivning i SF633 Differentialekvationer I Onsdagen den maj 03, kl 0800-300 Hjälpmedel: BETA, Mathematics Handbook Redovisa lösningarna på ett sådant sätt att beräkningar
1. Beräkna volymen av det område som begränsas av paraboloiden z = 4 x 2 y 2 och xy-planet. Lösning: Volymen erhålles som V = dxdydz.
 Lösningsförslag till tentamensskrivning i Matematik IV, F636(5B0,5B30). Tisdagen den januari 0, kl 400-900. Hjälpmedel: BETA, Mathematics Handbook. Redovisa lösningarna på ett sådant sätt att beräkningar
Lösningsförslag till tentamensskrivning i Matematik IV, F636(5B0,5B30). Tisdagen den januari 0, kl 400-900. Hjälpmedel: BETA, Mathematics Handbook. Redovisa lösningarna på ett sådant sätt att beräkningar
LMA515 Matematik, del B Sammanställning av lärmål
 LMA515 Matematik, del B Sammanställning av lärmål Lärmål för godkänt Funktion, gränsvärde, kontinuitet, derivata. Förklara begreppen funktion, definitionsmängd och värdemängd, och bestämma (största möjliga)
LMA515 Matematik, del B Sammanställning av lärmål Lärmål för godkänt Funktion, gränsvärde, kontinuitet, derivata. Förklara begreppen funktion, definitionsmängd och värdemängd, och bestämma (största möjliga)
DOM. 2014-10- 0 B Meddelad i Göteborg. KLAGANDE Stadsområdesnämnd Söder i Malmö kommun Box 31065. Ombud:!Vfoharnmed Hourani
 KAMMARRÄTTEN I Avdelning 2 2014-10- 0 B Meddelad i Göteborg Sida 1 (5) Mål m 7419-13 KLAGANDE Stadområdenämnd Söder i Malmö kommun Box 31065 200 49 Malmö MOTPART Ombud:!Vfoharnmed Hourani Juritfirman New
KAMMARRÄTTEN I Avdelning 2 2014-10- 0 B Meddelad i Göteborg Sida 1 (5) Mål m 7419-13 KLAGANDE Stadområdenämnd Söder i Malmö kommun Box 31065 200 49 Malmö MOTPART Ombud:!Vfoharnmed Hourani Juritfirman New
Gränsvärden. Joakim Östlund Patrik Lindegrén Pontus Nyrén 4 december 2003
 Gränsvärden Joakim Östlund Patrik Lindegrén Pontus Nyrén 4 december 2003 Innehåll Introduktion 3 2 Gränsvärden 4 2. Gränsvärden då går mot.................... 4 2.2 Gränsvärden då går mot a.....................
Gränsvärden Joakim Östlund Patrik Lindegrén Pontus Nyrén 4 december 2003 Innehåll Introduktion 3 2 Gränsvärden 4 2. Gränsvärden då går mot.................... 4 2.2 Gränsvärden då går mot a.....................
Matematiska Institutionen L osningar till v arens lektionsproblem. Uppgifter till lektion 9:
 Uppsala Universitet Matematiska Institutionen Inger Sigstam Envariabelanalys, hp --6 Uppgifter till lektion 9: Lösningar till vårens lektionsproblem.. Ett fönster har formen av en halvcirkel ovanpå en
Uppsala Universitet Matematiska Institutionen Inger Sigstam Envariabelanalys, hp --6 Uppgifter till lektion 9: Lösningar till vårens lektionsproblem.. Ett fönster har formen av en halvcirkel ovanpå en
ÖVN 6 - DIFFERENTIALEKVATIONER OCH TRANSFORMMETODER - SF Nyckelord och innehåll. a n (x x 0 ) n.
 n.") ÖVN 6 - DIFFERENTIALEKVATIONER OCH TRANSFORMMETODER - SF683 HTTP://KARLJODIFFTRANS.WORDPRESS.COM KARL JONSSON Nyckelord och innehåll Potensserielösningar Analytiska funktioner Konvergensradie Rot- och
ÖVN 6 - DIFFERENTIALEKVATIONER OCH TRANSFORMMETODER - SF683 HTTP://KARLJODIFFTRANS.WORDPRESS.COM KARL JONSSON Nyckelord och innehåll Potensserielösningar Analytiska funktioner Konvergensradie Rot- och
Sannolikhetslära statistisk inferens F10 ESTIMATION (NCT )
") Stat. teori gk, vt 2006, JW F10 ESTIMATION (NCT 8.1-8.3) Ordlita till NCT Iferece Slutledig, ifere Parameter Parameter Saolikhetlära tatitik ifere Hittill har vi ylat med aolikhetlära. Problem av type:
Stat. teori gk, vt 2006, JW F10 ESTIMATION (NCT 8.1-8.3) Ordlita till NCT Iferece Slutledig, ifere Parameter Parameter Saolikhetlära tatitik ifere Hittill har vi ylat med aolikhetlära. Problem av type:
Om dagens föreläsning!
 F8: Krafthalvledarförluter och kylning Om dagen föreläning! Termik deign är en av de viktigate ingredienerna i kraftelektrik deign, i ynnerhet för effekter högre än någ kw. Även om verkninggraden för en
F8: Krafthalvledarförluter och kylning Om dagen föreläning! Termik deign är en av de viktigate ingredienerna i kraftelektrik deign, i ynnerhet för effekter högre än någ kw. Även om verkninggraden för en
yz dx + x 2 ydy+ x 2 dz, (0, 0, 0) (1, 1, 1) (0, 0, 0) (1, 0, 0) (1, 1, 0) (0, 0, 0) (1, 1, 1) z = xy y = x 2 x(t) =y(t) =z(t) =t, 0 t 1
 (1, 1, 1) (0, 0, 0) (1, 0, 0) (1, 1, 0) (0, 0, 0) (1, 1, 1) z = xy y = x 2 x(t) =y(t) =z(t) =t, 0 t 1") γ z d d dz, γ,,,,,,,,,,,,,,,, z t t zt t, t P z t Q t R t P tq trz t dt t t t t dt t t r t,,, t P t Qt, Rt t P tq trz t dt,,,, r,t,, t P t, Qt t, Rt dt P tq trz t dt,,,, tdt r,,t, t P t t, Qt Rt P tq trz
γ z d d dz, γ,,,,,,,,,,,,,,,, z t t zt t, t P z t Q t R t P tq trz t dt t t t t dt t t r t,,, t P t Qt, Rt t P tq trz t dt,,,, r,t,, t P t, Qt t, Rt dt P tq trz t dt,,,, tdt r,,t, t P t t, Qt Rt P tq trz
SF1624 Algebra och geometri
 SF1624 Algebra och geometri Första föreläsningen Mats Boij Institutionen för matematik KTH 26 oktober, 2009 Översikt Kurspresentation Komplexa tal Kursmålen Efter genomgången kurs ska studenten vara förtrogen
SF1624 Algebra och geometri Första föreläsningen Mats Boij Institutionen för matematik KTH 26 oktober, 2009 Översikt Kurspresentation Komplexa tal Kursmålen Efter genomgången kurs ska studenten vara förtrogen
sanningsvärde, kallas utsagor. Exempel på utsagor från pass 1 är
 PASS 7. EKVATIONSLÖSNING 7. Grundbegrepp om ekvationer En ekvation säger att två matematiska uttryck är lika stora. Ekvationen har alltså ett likhetstecken och två deluttryck på var sin sida om likhetstecknet.
PASS 7. EKVATIONSLÖSNING 7. Grundbegrepp om ekvationer En ekvation säger att två matematiska uttryck är lika stora. Ekvationen har alltså ett likhetstecken och två deluttryck på var sin sida om likhetstecknet.
Implementering av bistatisk markspridningsmodell baserad på IEM
 FOI-R--1158--SE Januari 004 ISSN 1650-194 Metodrapport Magnu Gutafon Implementering av bitatik markpridningmodell baerad på IEM Senorteknik SE-581 11 Linköping TOTALFÖRSVARETS FORSKNINGSINSTITUT Senorteknik
FOI-R--1158--SE Januari 004 ISSN 1650-194 Metodrapport Magnu Gutafon Implementering av bitatik markpridningmodell baerad på IEM Senorteknik SE-581 11 Linköping TOTALFÖRSVARETS FORSKNINGSINSTITUT Senorteknik
Lågpassfilter. - filtrets passbandsförstärkning - filtrets gränsfrekvens - filtrets egenfrekvens H PB. arctan. Bilaga 7.1 sida 7.1.
 Bilaga 7. Vi kall här tudera egenkaper ho analoga ilter ör att enare i kuren preentera metoder ör att realiera tiddikreta ilter med liknande egenkaper.. Texten är en utvidgning av den text om örekommer
Bilaga 7. Vi kall här tudera egenkaper ho analoga ilter ör att enare i kuren preentera metoder ör att realiera tiddikreta ilter med liknande egenkaper.. Texten är en utvidgning av den text om örekommer
Sidor i boken
 Sidor i boken 0- Dagens mängdträning gäller ekvationer. Med den algebraträning vi nu har i ryggen bör även de mest komplicerade ekvationerna gå att reda ut. Tillsammans med övningarna i föreläsning 6 täcker
Sidor i boken 0- Dagens mängdträning gäller ekvationer. Med den algebraträning vi nu har i ryggen bör även de mest komplicerade ekvationerna gå att reda ut. Tillsammans med övningarna i föreläsning 6 täcker
Prov 1 2. Ellips 12 Numeriska och algebraiska metoder lösningar till övningsproven uppdaterad 20.5.2010. a) i) Nollställen för polynomet 2x 2 3x 1:
 i) Nollställen för polynomet 2x 2 3x 1:") Ellips Numeriska och algebraiska metoder lösningar till övningsproven uppdaterad.. Prov a) i) ii) iii) =,, = st 9,876 =,9876,99 = 9,9,66,66 =,7 =,7 Anmärkning. Nollor i början av decimaltal har ingen betydelse
Ellips Numeriska och algebraiska metoder lösningar till övningsproven uppdaterad.. Prov a) i) ii) iii) =,, = st 9,876 =,9876,99 = 9,9,66,66 =,7 =,7 Anmärkning. Nollor i början av decimaltal har ingen betydelse
(2xy + 1) dx + (3x 2 + 2x y ) dy = 0.
 dx + (3x 2 + 2x y ) dy = 0.") UPPSALA UNIVERSITET Matematiska institutionen Marko Djordjevic Prov i matematik Civilingenjörsprogrammen Ordinära differentialekvationer, 2 poäng 2006-03-06 Skrivtid: 9.00 1.00. Tillåtna hjälpmedel: Skrivdon,
UPPSALA UNIVERSITET Matematiska institutionen Marko Djordjevic Prov i matematik Civilingenjörsprogrammen Ordinära differentialekvationer, 2 poäng 2006-03-06 Skrivtid: 9.00 1.00. Tillåtna hjälpmedel: Skrivdon,
10.1 Linjära första ordningens differentialekvationer
 10.1 Linjära första ordningens differentialekvationer Här ska vi studera linjära första ordningens differentialekvationer som kan skrivas y (x) + g(x)y(x) = h(x) Om g(x) har en primitiv funktion G(x) så
10.1 Linjära första ordningens differentialekvationer Här ska vi studera linjära första ordningens differentialekvationer som kan skrivas y (x) + g(x)y(x) = h(x) Om g(x) har en primitiv funktion G(x) så
Gripenberg, Pohjonen, Solin. Mat-1.1510 Grundkurs i matematik 1 Tentamen och mellanförhörsomtagning 12.1.2012
 Mat-.5 Grundkur i matematik Tentamen och mellanförhöromtagning.. Gripenberg, Pohjonen, Solin Skriv ditt namn, nummer och övriga uppgifter på varje papper! Räknare eller tabeller får inte använda i detta
Mat-.5 Grundkur i matematik Tentamen och mellanförhöromtagning.. Gripenberg, Pohjonen, Solin Skriv ditt namn, nummer och övriga uppgifter på varje papper! Räknare eller tabeller får inte använda i detta
Numeriska metoder, grundkurs II. Dagens program. Gyllenesnittminimering, exempel Gyllenesnittetminimering. Övningsgrupp 1
 Numeriska metoder, grundkurs II Övning 5 för I Dagens program Övningsgrupp 1 Johannes Hjorth hjorth@nada.kth.se Rum :006, Roslagstullsbacken 5 08-790 69 00 Kurshemsida: http://www.csc.kth.se/utbildning/kth/kurser/d0/numi07
Numeriska metoder, grundkurs II Övning 5 för I Dagens program Övningsgrupp 1 Johannes Hjorth hjorth@nada.kth.se Rum :006, Roslagstullsbacken 5 08-790 69 00 Kurshemsida: http://www.csc.kth.se/utbildning/kth/kurser/d0/numi07
 http://www.i.e http://www.i.e http://www.i.e http://www.i.e http://www.i.e SVENSK STANDARD SS-EN 13445/C1:006 Fattälld 006-08-11 Utgåva 1 Tryckkärl (ej eldberörda) Unfired preure veel ICS 3.00.30 Språk:
http://www.i.e http://www.i.e http://www.i.e http://www.i.e http://www.i.e SVENSK STANDARD SS-EN 13445/C1:006 Fattälld 006-08-11 Utgåva 1 Tryckkärl (ej eldberörda) Unfired preure veel ICS 3.00.30 Språk:
1 Addition, subtraktion och multiplikation av (reella) tal
 tal") Omstuvat utdrag ur R Pettersson: Förberedande kurs i matematik Addition, subtraktion och multiplikation av (reella) tal För reella tal gäller som bekant bl.a. följande räkneregler: (a + b) + c = a + (b
Omstuvat utdrag ur R Pettersson: Förberedande kurs i matematik Addition, subtraktion och multiplikation av (reella) tal För reella tal gäller som bekant bl.a. följande räkneregler: (a + b) + c = a + (b
Upphämtningskurs i matematik
 Upphämtningskurs i matematik C.J. 2013 Föreläsningsunderlaget är uppbyggt utgående från kurserna i den långa gymnasiematematiken, ellips-kursböckerna (Schilds förlag) har använts som förebild. Böckerna
Upphämtningskurs i matematik C.J. 2013 Föreläsningsunderlaget är uppbyggt utgående från kurserna i den långa gymnasiematematiken, ellips-kursböckerna (Schilds förlag) har använts som förebild. Böckerna
Anmälan av rapporten inskrivna barn, ungdomar och föräldrar vid HVB barn och ungdoms verksamheter
 SOCIALTJÄNSTFÖRVALTNINGEN HVB BARN & UNGDOM SID 1 (6) 2007-04-02 Handläggare: Maija-Liia Laitinen Telefon: 08-508 25 255 Till Till ocialtjäntnämnden Anmälan av rapporten inkrivna barn, ungdomar och föräldrar
SOCIALTJÄNSTFÖRVALTNINGEN HVB BARN & UNGDOM SID 1 (6) 2007-04-02 Handläggare: Maija-Liia Laitinen Telefon: 08-508 25 255 Till Till ocialtjäntnämnden Anmälan av rapporten inkrivna barn, ungdomar och föräldrar
M0038M Differentialkalkyl, Lekt 17, H15
 M0038M Differentialkalkyl, Lekt 17, H15 Staffan Lundberg Luleå Tekniska Universitet Staffan Lundberg M0038M H15 1/ 38 Repetition Lekt 16 Uppskatta (8.2) 1/3 genom att använda differentialer. Svara på bråkform.
M0038M Differentialkalkyl, Lekt 17, H15 Staffan Lundberg Luleå Tekniska Universitet Staffan Lundberg M0038M H15 1/ 38 Repetition Lekt 16 Uppskatta (8.2) 1/3 genom att använda differentialer. Svara på bråkform.
MAA7 Derivatan. 2. Funktionens egenskaper. 2.1 Repetition av grundbegerepp
 MAA7 Derivatan 2. Funktionens egenskaper 2.1 Repetition av grundbegerepp - Det finns vissa begrepp som återkommer i nästan alla kurser i matematik. Några av dessa är definitionsmängd, värdemängd, största
MAA7 Derivatan 2. Funktionens egenskaper 2.1 Repetition av grundbegerepp - Det finns vissa begrepp som återkommer i nästan alla kurser i matematik. Några av dessa är definitionsmängd, värdemängd, största
Reglerteknik Ö6. Köp övningshäfte på kårbokhandeln. William Sandqvist
 eglerteknik Ö6 öp övninghäfte på kårbokhndeln . Stbilitet Vilk proceer är tbil? y y 6y x x b y 6y 8y x c y y y x 4x d y y y y u 5u e y 7 y y 4y u u f y y y 6y u 7u g h 6 4 . löning, Stbilitet y y 6y x
eglerteknik Ö6 öp övninghäfte på kårbokhndeln . Stbilitet Vilk proceer är tbil? y y 6y x x b y 6y 8y x c y y y x 4x d y y y y u 5u e y 7 y y 4y u u f y y y 6y u 7u g h 6 4 . löning, Stbilitet y y 6y x
ATT KUNNA TILL. MA1203 Matte C Vuxenutbildningen Dennis Jonsson
 ATT KUNNA TILL MA1203 Matte C 2011-06-14 Vuxenutbildningen Dennis Jonsson Sida 2 av 5 Att kunna till prov C1 Kunna kvadreringsreglerna! (...utan att titta i formelsamlingen) Kunna konjugatregeln! (...utan
ATT KUNNA TILL MA1203 Matte C 2011-06-14 Vuxenutbildningen Dennis Jonsson Sida 2 av 5 Att kunna till prov C1 Kunna kvadreringsreglerna! (...utan att titta i formelsamlingen) Kunna konjugatregeln! (...utan
MA2001 Envariabelanalys 6 hp Mikael Hindgren Tisdagen den 12 januari 2016 Skrivtid:
 Högskolan i Halmstad Tentamensskrivning ITE/MPE-lab MA Envariabelanalys 6 p Mikael Hindgren Tisdagen den januari 6 Skrivtid: 9.-3. Inga jälpmedel. Fyll i omslaget fullständigt oc skriv namn på varje papper.
Högskolan i Halmstad Tentamensskrivning ITE/MPE-lab MA Envariabelanalys 6 p Mikael Hindgren Tisdagen den januari 6 Skrivtid: 9.-3. Inga jälpmedel. Fyll i omslaget fullständigt oc skriv namn på varje papper.
Omtentamen i DV & TDV
 Umeå Universitet Institutionen för Datavetenskap Gunilla Wikström (e-post wikstrom) Omtentamen i Teknisk-Vetenskapliga Beräkningar för DV & TDV Tentamensdatum: 2006-06-05 Skrivtid: 9-15 Hjälpmedel: inga
Umeå Universitet Institutionen för Datavetenskap Gunilla Wikström (e-post wikstrom) Omtentamen i Teknisk-Vetenskapliga Beräkningar för DV & TDV Tentamensdatum: 2006-06-05 Skrivtid: 9-15 Hjälpmedel: inga
Diagonalisering och linjära system ODE med konstanta koe cienter.
 Diagonalisering och linjära system ODE med konstanta koe cienter. Variabelbyte i linjära system di erentialekvationer. Målet med det kapitlet i kursen är att lösa linjära system di erentialekvationer på
Diagonalisering och linjära system ODE med konstanta koe cienter. Variabelbyte i linjära system di erentialekvationer. Målet med det kapitlet i kursen är att lösa linjära system di erentialekvationer på
ODE av andra ordningen, och system av ODE
 ODE av andra ordningen, och system av ODE Exempel på di erentialekvation av andra ordningen (innehåller andra derivata) Pendel beskrives av Newtons andra lag: Kraft = massa Acceleration Acceleration =
ODE av andra ordningen, och system av ODE Exempel på di erentialekvation av andra ordningen (innehåller andra derivata) Pendel beskrives av Newtons andra lag: Kraft = massa Acceleration Acceleration =
Implementering av digitala filter
 Kapitel 9 Implementering av digitala filter Som vi sett i kapitel 8 kan det behövas ett mycket stort antal koefficienter för att representera ett digitalt filter. Detta gäller i synnerhet FIR filter. Det
Kapitel 9 Implementering av digitala filter Som vi sett i kapitel 8 kan det behövas ett mycket stort antal koefficienter för att representera ett digitalt filter. Detta gäller i synnerhet FIR filter. Det
BEGREPPSMÄSSIGA PROBLEM
 BEGREPPSMÄSSIGA PROBLEM Större delen av de rekommenderade uppgifterna i boken är beräkningsuppgifter. Det är emellertid även viktigt att utveckla en begreppsmässig förståelse för materialet. Syftet med
BEGREPPSMÄSSIGA PROBLEM Större delen av de rekommenderade uppgifterna i boken är beräkningsuppgifter. Det är emellertid även viktigt att utveckla en begreppsmässig förståelse för materialet. Syftet med
201. (A) Beräkna derivatorna till följande funktioner och förenkla så långt som möjligt: a. x 7 5x b. (x 2 x) 4. x 2 +1 x + 1 x 2 (x + 1) 2 f.
 Beräkna derivatorna till följande funktioner och förenkla så långt som möjligt: a. x 7 5x b. (x 2 x) 4. x 2 +1 x + 1 x 2 (x + 1) 2 f.") Kap..5,.8.9. Lutning, tangent, normal, derivata, höger och vänsterderivata, differential, allmänna deriveringsregler, kedjeregel, derivator av högre ordning, implicit derivering. Gränsvärden. 0. (A) Beräkna
Kap..5,.8.9. Lutning, tangent, normal, derivata, höger och vänsterderivata, differential, allmänna deriveringsregler, kedjeregel, derivator av högre ordning, implicit derivering. Gränsvärden. 0. (A) Beräkna
Introduktion till Komplexa tal
 October 8, 2014 Introduktion till Komplexa tal HT 2014 CTH Lindholmen 2 Index 1 Komplexa tal 5 1.1 Definition och jämförelse med R 2................ 5 1.1.1 Likheter mellan R 2 och C................ 5
October 8, 2014 Introduktion till Komplexa tal HT 2014 CTH Lindholmen 2 Index 1 Komplexa tal 5 1.1 Definition och jämförelse med R 2................ 5 1.1.1 Likheter mellan R 2 och C................ 5
Föreläsningen ger en introduktion till differentialekvationer och behandlar stoff från delkapitel 18.1, 18.3 och 7.9 i Adams. 18.
 Föreläsningen ger en introduktion till differentialekvationer och behandlar stoff från delkapitel 18.1, 18.3 och 7.9 i Adams. 18.1 Delkapitlet introducerar en del terminologi och beteckningar som används.
Föreläsningen ger en introduktion till differentialekvationer och behandlar stoff från delkapitel 18.1, 18.3 och 7.9 i Adams. 18.1 Delkapitlet introducerar en del terminologi och beteckningar som används.
Studietips info r kommande tentamen TEN1 inom kursen TNIU23
 Studietips info r kommande tentamen TEN inom kursen TNIU3 Lämplig ordning på sammanfattande studier inom denna kurs: Inled med att grundligt studera föreläsningsanteckningarna Därefter läs tillhörande
Studietips info r kommande tentamen TEN inom kursen TNIU3 Lämplig ordning på sammanfattande studier inom denna kurs: Inled med att grundligt studera föreläsningsanteckningarna Därefter läs tillhörande
med angivande av definitionsmängd, asymptoter och lokala extrempunkter. x 2 e x =
 UPPSALA UNIVERSITET Matematiska institutionen Anders Källström Prov i matematik Distans, Matematik A Analys 2004 02 4 Skrivtid: 0-5. Hjälpmedel: Gymnasieformelsamling. Lösningarna skall åtföljas av förklarande
UPPSALA UNIVERSITET Matematiska institutionen Anders Källström Prov i matematik Distans, Matematik A Analys 2004 02 4 Skrivtid: 0-5. Hjälpmedel: Gymnasieformelsamling. Lösningarna skall åtföljas av förklarande
Avsnitt 1, introduktion.
 KTHs Sommarmatematik Introduktion 1:1 1:1 Kvadratkomplettering Avsnitt 1, introduktion. Det här är en viktig teknik som måste tränas in. Poängen med kvadratkomplettering är att man direkt kan se om andragradsfunktionen
KTHs Sommarmatematik Introduktion 1:1 1:1 Kvadratkomplettering Avsnitt 1, introduktion. Det här är en viktig teknik som måste tränas in. Poängen med kvadratkomplettering är att man direkt kan se om andragradsfunktionen
KTH Matematik Tentamensskrivning i Differentialekvationer I, SF1633.
 KTH Matematik Tentamensskrivning i Differentialekvationer I, SF1633. Måndagen den 17 oktober 11, kl 8-13. Hjälpmedel: BETA, Mathematics Handbook. Redovisa lösningarna på ett sådant sätt att beräkningar
KTH Matematik Tentamensskrivning i Differentialekvationer I, SF1633. Måndagen den 17 oktober 11, kl 8-13. Hjälpmedel: BETA, Mathematics Handbook. Redovisa lösningarna på ett sådant sätt att beräkningar