Välkomna till TSRT15 Reglerteknik Föreläsning 2
|
|
|
- Alexandra Jonsson
- för 6 år sedan
- Visningar:
Transkript

1 Välkomna till TSRT15 Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
2 Sammanfattning av förra föreläsningen 2 w(t) r(t) Regulator u(t) System y(t) Återkoppling Konstruera en regulator (matematiskt uttryck datorkod) som beräknar styrsignalen u(t) så att systemet (enligt mätsignalen y(t)) beter sig som önskat (referenssignalen r(t)) trots störningar w(t)
3 Sammanfattning av förra föreläsningen 3 Öppen styrning: Regulatorn använder sig ej av utsignalen y(t) Sluten styrning: Regulatorn använder sig av utsignalen y(t) Återkoppling: ett annat namn på sluten styrning P-reglering: återkoppling med styrlagen u(t)=k(r(t)-y(t)) Modell: en matematisk beskrivning (differentialekvation) av ett system
 Reglerteknik handlar i princip om att ta fram, lösa, och analysera differentialekvationer samt dess lösningar!")
4 Farthållaren från förra föreläsningen 4 Vi utvärderade farthållaren genom att lösa differentialekvationen och relatera till önskat beteende (snabbhet, stationärt fel, ) Reglerteknik handlar i princip om att ta fram, lösa, och analysera differentialekvationer samt dess lösningar! (vi kommer dock ta genvägar...)
5 Generella fallet 5 Ett reglersystem beskrivs, i denna kurs, med en differentialekvation i insignaler och utsignaler Vi kallar detta ett n:te ordningens system (n m, kallas propert system) koefficienterna a i och b i konstanta (linjär differentialekvation) u(t) och begynnelsevillkor givna Lösning ges av homogen+partikulär lösning
6 Karakteristiska ekvationen 6 Homogena lösningen ges av (antag enkla rötter) λ 1,, λ n är lösningar till den karakteristiska ekvationen Partikulära lösningen fås genom ansättning (dvs kvalificerad gissning)



 Lösning av karakteristiska")
7 Karakteristiska ekvationen 7 Det viktiga är inte den exakta lösningen (konstanter osv), utan det faktum att rötterna till karakteristiska ekvationen beskriver karaktären hos alla tänkbara lösningar. Vi studerar ett andra ordningens system drivet av ett steg (ett s.k stegsvar) Lösning av karakteristiska ekvationen och partikulärlösning ger
8 Karakteristiska ekvationen 8 Fall 1: λ 1 och λ 2 reella och negativa, t.ex λ 1 =-1 och λ 1 =-2 C 1 och C 2 fås från begynnelsevillkor
9 Karakteristiska ekvationen 9 Fall 1: λ 1 och λ 2 reella men en positiv, t.ex λ 1 =-1 och λ 1 =2
10 Karakteristiska ekvationen 10 Fall 1: λ 1 och λ 2 komplexa med negativ realdel
11 Karakteristiska ekvationen 11 Fall 1: λ 1 och λ 2 komplexa med positiv realdel
12 Karakteristiska ekvationen 12 Sammanfattning Lösningarnas karaktär bestäms av rötternas position i det komplexa talplanet imag(λ) real(λ) Alla rötter i vänstra halvplanet garanterar att y h (t) 0 (kallas stabilt) Någon rot i högra halvplanet leder till y h (t) (kallas instabilt) Komplexa rötter kan ge oscillationer


13 Karakteristiska ekvationen 13 Ett antal rötter i -1, samt ett antal komplexa -0.5±0.86i Mer behöver vi inte veta för att dra slutsatsen att utsignalen går mot 0, möjligtvis med lite oscillationer (om u(t) är 0)
14 Laplacetransform 14 Ett sätt att förenkla arbete med linjära differentialekvationer Beteckning: tidsfunktion (en signal): signaltransform: Definition:


15 Laplacetransform 15 Viktigaste räkneregler (sidan 232 i boken) Slutvärdesteoremet (om f(t) konvergerar)
16 Laplacetransform 16 Exempel: Laplacetransform av ett steg
17 Laplacetransform 17 Exempel: Farthållare med icke definierad styrsignal antag alla begynnelsevärden noll bryt ut Y(s)
18 Laplacetransform 18 I en beskrivning kallar vi G(s) systemets överföringsfunktion Definition: Poler till G(s) = rötter till nämnaren i G(s) = rötter till karakteristiska ekvationen Nollställen till G(s) = rötter till täljaren i G(s) Inom reglerteknik arbetar vi ofta med systemets överföringsfunktion, istället för de underliggande differentialekvationerna
19 Generella fallet 19 Generella fallet: Ett insignal-utsignalsamband transformeras till (antag att alla begynnelsevillkor är 0) Överföringsfunktionen från u till y blir sålunda
20 Specifikationer 20 Reglerteknikens kärna: Välj insignal så att utsignalen beter sig som önskat Vi behöver sätt att beskriva vad vi menar, specifikationer
21 Specifikationer 21 Regulator System r(t) Σ e(t) F u(t) G y(t) -1 Hur skall vi välja regulatorn F? (nästa föreläsning) Oftast ges specifikationer i form av krav på stabilitet samt respons på stegsvar i termer av snabbhet och svängighet. Vi vill relatera dessa specifikationer till reglersystemets överföringsfunktioner
22 Specifikationer 22 Stabilitet: Absolut viktigaste specifikationen! Definition 1: Ett system är insignal-utsignalstabilt om en begränsad insignal leder till en begränsad utsignal. Definition 2: Inversa Laplacetransformen av en överföringsfunktion kallas för viktsfunktionen Sats 2.1: Ett system är insignal-utsignalstabilt om och endast om viktsfunktionen uppfyller
23 Specifikationer 23 Sats 2.2: Ett system med proper (m<=n) överföringsfunktion G(s) är insignal-utsignalstabil om och endast om alla poler till G(s) has strikt negativa realdelar
24 Specifikationer 24 Snabbhet: Hur snabbt konvergerar lösningarna till slutvärdet Studera ett första ordningens system med en pol i Med ett steg som insignal (ett stegsvar) och begynnelsevärde noll blir lösningen Konstanten T kallas systemets tidskonstant och är inversen av G(s) pol Poler långt till vänster in i vänstra halvplanet ger liten tidskonstant vilket ger ett snabbt system
25 Specifikationer 25 Svängighet: Studera ett fjäder-dämparsystem y(t) y(t): Upphängningspunktens position [m] u(t): Kraft verkande i fäste [N] Dämpningskonstant α [Ns/m] Fjäderkonstant k [N/m] Upphängd massa m [kg] u(t)
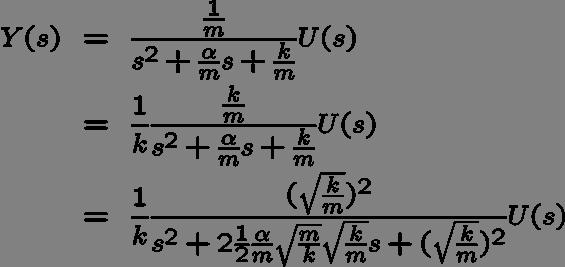
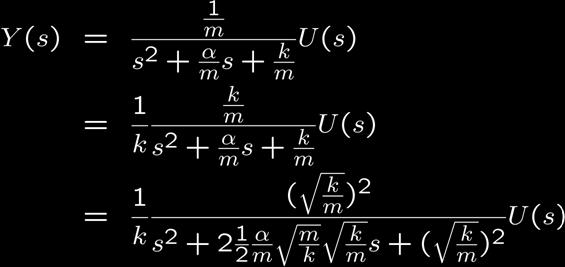
26 Specifikationer 26 Svängighet: Studera ett normaliserat andra ordningens system Om relativa dämpningen ξ är mindre än 1 fås komplexa poler Med ett steg som insignal (ett stegsvar) och begynnelsevärde noll blir lösningen
27 Specifikationer 27
28 Specifikationer 28 Större ger ett snabbare system Mindre ger ett svängigare system Poltolkning: Poler längre bort från origo ger ett snabbare system. Poler relativt längre upp/ner i komplexa talplanet ger ett svängigare system
29 Specifikationer 29 y(t) u(t)
30 Sammanfattning 30 Sammanfattning av dagens föreläsning Vi modellerar system med linjära differentialekvationer. Lösningarna till differentialekvationerna ges av en summa exponentialfunktioner, framtagna via karakteristiska ekvationens rötter. Vi använder Laplacetransformer som ett verktyg för att hantera differentialekvationer (varför blir mycket mer tydligt nästa föreläsning). När vi Laplacetransformerat våra ekvationer får vi en överföringsfunktion, och denna kommer vi använda mycket. Specifikationer på ett stegsvar kan tolkas i termer av polernas position. Poler långt till vänster = snabbt, mycket komplexdel = svängigt
31 Sammanfattning 31 Viktiga begrepp Stegsvar: Utsignal när insignalen är ett steg. Används ofta (i teori och praktik) för att studera ett systems kvalitativa beteende. Överföringsfunktion: Transformsambandet mellan in- och utsignal. Poler: Rötterna till överföringsfunktionens nämnare. Innehåller mycket information om systemets egenskaper. Nollställen: Rötterna till överföringsfunktionens täljare. Stabil: Homogena lösningen går mot noll. Kräver att polerna är i vänstra halvplanet.
Välkomna till Reglerteknik Föreläsning 2
 Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till TSRT19 Reglerteknik Föreläsning 3. Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula
 Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
AUTOMATIC CONTROL REGLERTEKNIK LINKÖPINGS UNIVERSITET. M. Enqvist TTIT62: Föreläsning 3 AUTOMATIC CONTROL REGLERTEKNIK LINKÖPINGS UNIVERSITET
 Martin Enqvist Överföringsfunktioner, poler och stegsvar Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(8) Repetition: Öppen styrning & återkoppling 4(8)
Martin Enqvist Överföringsfunktioner, poler och stegsvar Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(8) Repetition: Öppen styrning & återkoppling 4(8)
Laplacetransform, poler och nollställen
 Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
TSIU61: Reglerteknik. Sammanfattning från föreläsning 3 (2/4) ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.
 ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.") TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik. PID-reglering Specifikationer. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
AUTOMATIC CONTROL REGLERTEKNIK LINKÖPINGS UNIVERSITET. M. Enqvist TTIT62: Föreläsning 2. Här är
 Martin Enqvist Återkoppling, PID-reglering, specifikationer Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(21) Exempel: Farthållare i en bil 4(21) Välj
Martin Enqvist Återkoppling, PID-reglering, specifikationer Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(21) Exempel: Farthållare i en bil 4(21) Välj
TSRT91 Reglerteknik: Föreläsning 2
 Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Välkomna till TSRT19 Reglerteknik Föreläsning 4. Sammanfattning av föreläsning 3 Rotort Mer specifikationer Nollställen (om vi hinner)
") Välkomna till TSRT19 Reglerteknik Föreläsning 4 Sammanfattning av föreläsning 3 Rotort Mer specifikationer Nollställen (om vi hinner) Sammanfattning av förra föreläsningen 2 Vi introducerade PID-regulatorn
Välkomna till TSRT19 Reglerteknik Föreläsning 4 Sammanfattning av föreläsning 3 Rotort Mer specifikationer Nollställen (om vi hinner) Sammanfattning av förra föreläsningen 2 Vi introducerade PID-regulatorn
TSIU61: Reglerteknik. Poler och nollställen Stabilitet Blockschema. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 3 Poler och nollställen Stabilitet Blockschema Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 3 Gustaf Hendeby HT1 2017 1 / 26 Innehåll föreläsning 3 ˆ Sammanfattning
TSIU61: Reglerteknik Föreläsning 3 Poler och nollställen Stabilitet Blockschema Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 3 Gustaf Hendeby HT1 2017 1 / 26 Innehåll föreläsning 3 ˆ Sammanfattning
TSIU61: Reglerteknik. Matematiska modeller Laplacetransformen. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 2 Matematiska modeller Laplacetransformen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 2 Gustaf Hendeby HT1 2017 1 / 21 Innehåll föreläsning 2 ˆ Sammanfattning
TSIU61: Reglerteknik Föreläsning 2 Matematiska modeller Laplacetransformen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 2 Gustaf Hendeby HT1 2017 1 / 21 Innehåll föreläsning 2 ˆ Sammanfattning
TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 10
 TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 10 Johan Löfberg Avdelningen för Reglerteknik Institutionen för systemteknik johan.lofberg@liu.se Kontor: B-huset, mellan ingång 27 och 29
TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 10 Johan Löfberg Avdelningen för Reglerteknik Institutionen för systemteknik johan.lofberg@liu.se Kontor: B-huset, mellan ingång 27 och 29
Övningar i Reglerteknik. Differentialekvationer kan lösas med de metoder som behandlades i kurserna i matematisk analys. y(0) = 2,
 = 2,") Differentialekvationer Övningar i Reglerteknik Differentialekvationer kan lösas med de metoder som behandlades i kurserna i matematisk analys.. Lös följande begynnelsevärdesproblem dy dt y =, t > 0 y(0)
Differentialekvationer Övningar i Reglerteknik Differentialekvationer kan lösas med de metoder som behandlades i kurserna i matematisk analys.. Lös följande begynnelsevärdesproblem dy dt y =, t > 0 y(0)
Övningar i Reglerteknik
 Övningar i Reglerteknik Stabilitet hos återkopplade system Ett system är stabilt om utsignalen alltid är begränsad om insignalen är begränsad. Linjära tidsinvarianta system är stabila precis då alla poler
Övningar i Reglerteknik Stabilitet hos återkopplade system Ett system är stabilt om utsignalen alltid är begränsad om insignalen är begränsad. Linjära tidsinvarianta system är stabila precis då alla poler
Lösningsförslag till tentamen i Reglerteknik (TSRT19)
") Lösningsförslag till tentamen i Reglerteknik (TSRT9) 26-3-6. (a) Systemet är stabilt och linjärt. Därmed kan principen sinus in, sinus ut tillämpas. Givet insignalen u(t) sin (t) sin ( t) har vi G(i )
Lösningsförslag till tentamen i Reglerteknik (TSRT9) 26-3-6. (a) Systemet är stabilt och linjärt. Därmed kan principen sinus in, sinus ut tillämpas. Givet insignalen u(t) sin (t) sin ( t) har vi G(i )
Föreläsning 2. Reglerteknik AK. c Bo Wahlberg. 3 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Välkomna till TSRT19 Reglerteknik Föreläsning 8. Sammanfattning av föreläsning 7 Framkoppling Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
Föreläsning 1 Reglerteknik AK
 Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
Föreläsning 3. Reglerteknik AK. c Bo Wahlberg. 9 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 3 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 9 september 2013 Introduktion Förra gången: PID-reglering Dagens program: Stabilitet Rotort
Föreläsning 3 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 9 september 2013 Introduktion Förra gången: PID-reglering Dagens program: Stabilitet Rotort
Välkomna till TSRT19 Reglerteknik Föreläsning 6. Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 6 Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden! Sammanfattning av förra föreläsningen 2 G(s) Sinus in (i stabilt system) ger sinus
Välkomna till TSRT19 Reglerteknik Föreläsning 6 Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden! Sammanfattning av förra föreläsningen 2 G(s) Sinus in (i stabilt system) ger sinus
TENTAMEN I REGLERTEKNIK
 TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
A
 Lunds Universitet LTH Ingenjorshogskolan i Helsingborg Tentamen i Reglerteknik 2008{05{29. Ett system beskrivs av foljande in-utsignalsamband: dar u(t) ar insignal och y(t) utsignal. d 2 y dt 2 + dy du
Lunds Universitet LTH Ingenjorshogskolan i Helsingborg Tentamen i Reglerteknik 2008{05{29. Ett system beskrivs av foljande in-utsignalsamband: dar u(t) ar insignal och y(t) utsignal. d 2 y dt 2 + dy du
Välkomna till TSRT19 Reglerteknik Föreläsning 10
 Välkomna till TSRT19 Reglerteknik Föreläsning 10 Sammanfattning av föreläsning 9 Tillståndsbeskrivningar Överföringsfunktion vs tillståndmodell Stabilitet Styrbarhet och observerbarhet Sammanfattning föreläsning
Välkomna till TSRT19 Reglerteknik Föreläsning 10 Sammanfattning av föreläsning 9 Tillståndsbeskrivningar Överföringsfunktion vs tillståndmodell Stabilitet Styrbarhet och observerbarhet Sammanfattning föreläsning
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER, TER 2, TER E TID: 4 mars 208, klockan 8-3 KURS: TSRT2, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
TENTAMEN I REGLERTEKNIK Y/D SAL: TER, TER 2, TER E TID: 4 mars 208, klockan 8-3 KURS: TSRT2, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
Välkomna till TSRT19 Reglerteknik M Föreläsning 9
 Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning av förra föreläsningen H(s) W(s) 2 R(s)
Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning av förra föreläsningen H(s) W(s) 2 R(s)
Välkomna till TSRT19 Reglerteknik M Föreläsning 9
 Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning föreläsning 8 2 F(s) Lead-lag design:
Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning föreläsning 8 2 F(s) Lead-lag design:
6. Stabilitet. 6. Stabilitet
 6. Stabilitet 6. Stabilitet Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt
6. Stabilitet 6. Stabilitet Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt
TENTAMEN Reglerteknik 4.5hp X3
 OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 4.5hp. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans
OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 4.5hp. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans
Reglerteknik, TSIU61. Föreläsning 2: Laplacetransformen
 Reglerteknik, TSIU61 Föreläsning 2: Laplacetransformen Reglerteknik, ISY, Linköpings Universitet Innehåll 2(13) 1. Sammanfattning av föreläsning 1 2. Hur löser man differentialekvationer på ett arbetsbesparande
Reglerteknik, TSIU61 Föreläsning 2: Laplacetransformen Reglerteknik, ISY, Linköpings Universitet Innehåll 2(13) 1. Sammanfattning av föreläsning 1 2. Hur löser man differentialekvationer på ett arbetsbesparande
Välkomna till TSRT19 Reglerteknik Föreläsning 5. Sammanfattning av föreläsning 4 Frekvensanalys Bodediagram
 Välkomna till TSRT19 Reglerteknik Föreläsning 5 Sammanfattning av föreläsning 4 Frekvensanalys Bodediagram Sammanfattning av förra föreläsningen 2 Givet ett polpolynom med en varierande parameter, och
Välkomna till TSRT19 Reglerteknik Föreläsning 5 Sammanfattning av föreläsning 4 Frekvensanalys Bodediagram Sammanfattning av förra föreläsningen 2 Givet ett polpolynom med en varierande parameter, och
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 214-1-24 Sal (1) TER1,TER2,TERE (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 214-1-24 Sal (1) TER1,TER2,TERE (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
6. Stabilitet. 6. Stabilitet. 6. Stabilitet. 6.1 Stabilitetsdefinitioner. 6. Stabilitet. 6.2 Poler och stabilitet. 6.1 Stabilitetsdefinitioner
 Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt kan bli instabilt genom för
Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt kan bli instabilt genom för
Reglerteknik I: F2. Överföringsfunktionen, poler och stabilitet. Dave Zachariah. Inst. Informationsteknologi, Avd. Systemteknik
 Reglerteknik I: F2 Överföringsfunktionen, poler och stabilitet Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 16 Linjära systemmodeller Linjära tidsinvarianta modeller är användbara
Reglerteknik I: F2 Överföringsfunktionen, poler och stabilitet Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 16 Linjära systemmodeller Linjära tidsinvarianta modeller är användbara
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 216-8-19 Sal (1) (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal som
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 216-8-19 Sal (1) (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal som
TSRT91 Reglerteknik: Föreläsning 9
 TSRT91 Reglerteknik: Föreläsning 9 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 20 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT91 Reglerteknik: Föreläsning 9 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 20 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TENTAMEN I REGLERTEKNIK TSRT03, TSRT19
 TENTAMEN I REGLERTEKNIK TSRT3, TSRT9 TID: 23 april 29, klockan 4-9 KURS: TSRT3, TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 5.3, 7.3 KURSADMINISTRATÖR:
TENTAMEN I REGLERTEKNIK TSRT3, TSRT9 TID: 23 april 29, klockan 4-9 KURS: TSRT3, TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 5.3, 7.3 KURSADMINISTRATÖR:
Reglerteknik I: F3. Tidssvar, återkoppling och PID-regulatorn. Dave Zachariah. Inst. Informationsteknologi, Avd. Systemteknik
 Reglerteknik I: F3 Tidssvar, återkoppling och PID-regulatorn Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 12 Poler och tidssvar Stegsvar u(t) G y(t) Modell Y (s) = G(s)U(s) med överföringsfunktion
Reglerteknik I: F3 Tidssvar, återkoppling och PID-regulatorn Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 12 Poler och tidssvar Stegsvar u(t) G y(t) Modell Y (s) = G(s)U(s) med överföringsfunktion
Reglerteknik AK. Tentamen 9 maj 2015 kl 08 13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 9 maj 5 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt 5 poäng.
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 9 maj 5 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt 5 poäng.
6. Stabilitet. 6. Stabilitet. 6. Stabilitet. 6.1 Stabilitetsdefinitioner. 6. Stabilitet. 6.2 Poler och stabilitet. 6.1 Stabilitetsdefinitioner
 Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt kan bli instabilt genom för
Såsom framgått i de två inledande kapitlen förutsätter en lyckad regulatordesign kompromisser mellan prestanda ( snabbhet ) och stabilitet. Ett system som oreglerat är stabilt kan bli instabilt genom för
Välkomna till TSRT15 Reglerteknik Föreläsning 12
 Välkomna till TSRT15 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Återkoppling av skattade tillstånd Integralverkan Återblick på kursen Sammanfattning föreläsning 11 2 Tillstånden innehåller
Välkomna till TSRT15 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Återkoppling av skattade tillstånd Integralverkan Återblick på kursen Sammanfattning föreläsning 11 2 Tillstånden innehåller
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-6-7 Sal () TER2 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-6-7 Sal () TER2 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL En tillståndsmodell ges t.ex. av den styrbara kanoniska formen: s 2 +4s +1.
 REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL20 Lösningsförslag till tentamen 2009 2 5, kl. 4.00 9.00. (a) Laplacetransform av () ger s 2 Y (s)+4sy (s)+y (s) =U(s), och överföringsfunktionen blir G(s)
REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL20 Lösningsförslag till tentamen 2009 2 5, kl. 4.00 9.00. (a) Laplacetransform av () ger s 2 Y (s)+4sy (s)+y (s) =U(s), och överföringsfunktionen blir G(s)
TENTAMEN: DEL B Reglerteknik I 5hp
 TENTAMEN: DEL B Reglerteknik I 5hp Tid: Fredag 8 mars 0, kl. 4.00-9.00 Plats: Gimogatan 4 sal Ansvarig lärare: Hans Norlander, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl 5.30 och kl 7.30.
TENTAMEN: DEL B Reglerteknik I 5hp Tid: Fredag 8 mars 0, kl. 4.00-9.00 Plats: Gimogatan 4 sal Ansvarig lärare: Hans Norlander, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl 5.30 och kl 7.30.
Kap 3 - Tidskontinuerliga LTI-system. Användning av Laplacetransformen för att beskriva LTI-system: Samband poler - respons i tidsplanet
 Kap 3 - Tidskontinuerliga LTI-system Användning av Laplacetransformen för att beskriva LTI-system: Överföringsfunktion Poler, nollställen, stabilitet Samband poler - respons i tidsplanet Slut- och begynnelsevärdesteoremen
Kap 3 - Tidskontinuerliga LTI-system Användning av Laplacetransformen för att beskriva LTI-system: Överföringsfunktion Poler, nollställen, stabilitet Samband poler - respons i tidsplanet Slut- och begynnelsevärdesteoremen
Industriella styrsystem, TSIU06. Föreläsning 1
 Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Kursöversikt 2(34) Detta är en laborations- och projektkurs. Praktiken kommer före teorin (kursen Reglerteknik) Tre
Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Kursöversikt 2(34) Detta är en laborations- och projektkurs. Praktiken kommer före teorin (kursen Reglerteknik) Tre
Lösningsförslag till tentamen i Reglerteknik fk M (TSRT06)
") Lösningsförslag till tentamen i Reglerteknik fk M (TSRT6) 216-1-15 1. (a) Känslighetsfunktionen S(iω) beskriver hur systemstörningar och modellfel påverkar utsignalen från det återkopplade systemet. Oftast
Lösningsförslag till tentamen i Reglerteknik fk M (TSRT6) 216-1-15 1. (a) Känslighetsfunktionen S(iω) beskriver hur systemstörningar och modellfel påverkar utsignalen från det återkopplade systemet. Oftast
TENTAMEN I REGLERTEKNIK I
 TENTAMEN I REGLERTEKNIK I SAL: TER2 TID: 6 mars 2, klockan 8-3 KURS: TSRT9, Reglerteknik I PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 9 ANSVARIG
TENTAMEN I REGLERTEKNIK I SAL: TER2 TID: 6 mars 2, klockan 8-3 KURS: TSRT9, Reglerteknik I PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 9 ANSVARIG
Välkomna till TSRT19 Reglerteknik Föreläsning 12
 Välkomna till TSRT19 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Integralverkan Återkoppling av skattade tillstånd Återblick på kursen LABFLYTT! 2 PGA felbokning datorsal så måste ett
Välkomna till TSRT19 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Integralverkan Återkoppling av skattade tillstånd Återblick på kursen LABFLYTT! 2 PGA felbokning datorsal så måste ett
Reglerteknik AK. Tentamen 24 oktober 2016 kl 8-13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
Formalia. Reglerteknik, TSRT12. Föreläsning 1. Första föreläsningen. Vad är reglerteknik?
 Formalia Reglerteknik, TSRT12 Föreläsning 1 Hemsida. http://www.control.isy.liu.se/student/tsrt12/ Föreläsnings-oh läggs ut ca en dag i förväg. Lablistor på första lektionen. Läroboken tillåten på tentan
Formalia Reglerteknik, TSRT12 Föreläsning 1 Hemsida. http://www.control.isy.liu.se/student/tsrt12/ Föreläsnings-oh läggs ut ca en dag i förväg. Lablistor på första lektionen. Läroboken tillåten på tentan
Övning 3. Introduktion. Repetition
 Övning 3 Introduktion Varmt välkomna till tredje övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Nästa gång är det datorövning. Kontrollera att ni kan komma in i XQ-salarna. Endast en kort genomgång,
Övning 3 Introduktion Varmt välkomna till tredje övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Nästa gång är det datorövning. Kontrollera att ni kan komma in i XQ-salarna. Endast en kort genomgång,
A. Stationära felet blir 0. B. Stationära felet blir 10 %. C. Man kan inte avgöra vad stationära felet blir enbart med hjälp av polerna.
 Man använder en observatör för att skatta tillståndsvariablerna i ett system, och återkopplar sedan från det skattade tillståndet. Hur påverkas slutna systemets överföringsfunktion om man gör observatören
Man använder en observatör för att skatta tillståndsvariablerna i ett system, och återkopplar sedan från det skattade tillståndet. Hur påverkas slutna systemets överföringsfunktion om man gör observatören
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-- Sal () T,T2,KÅRA (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-- Sal () T,T2,KÅRA (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
TENTAMEN REGLERTEKNIK TSRT15
 TENTAMEN REGLERTEKNIK TSRT5 SAL: TER3+4 TID: 8 december 2, klockan 4-9 KURS: TSRT5 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL BLAD: 3 exklusive försättsblad ANSVARIG LÄRARE: Johan Löfberg JOURHAVANDE
TENTAMEN REGLERTEKNIK TSRT5 SAL: TER3+4 TID: 8 december 2, klockan 4-9 KURS: TSRT5 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL BLAD: 3 exklusive försättsblad ANSVARIG LÄRARE: Johan Löfberg JOURHAVANDE
övningstentamen I DYNAMISKA SYSTEM OCH REGLERING
 övningstentamen I DYNAMISKA SYSTEM OCH REGLERING SAL: - TID: mars 27, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 73-9699 BESÖKER SALEN:
övningstentamen I DYNAMISKA SYSTEM OCH REGLERING SAL: - TID: mars 27, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 73-9699 BESÖKER SALEN:
EL1000/1120/1110 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 12: Sammanfattning Kursinfo: Resterande räknestugor 141208, 10-12 Q24 141210, 10-12 L21 141215, 10-12 Q34 141215, 13-15 Q11
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 12: Sammanfattning Kursinfo: Resterande räknestugor 141208, 10-12 Q24 141210, 10-12 L21 141215, 10-12 Q34 141215, 13-15 Q11
Regulator. G (s) Figur 1: Blockdiagram för ett typiskt reglersystem
 Figur 1: Blockdiagram för ett typiskt reglersystem") Rs) + Σ Es) Regulator G s) R Us) Process G s) P Ys) Figur : Blockdiagram för ett typiskt reglersystem Något om PID-reglering PID-regulatorn består av proportionell del, integrerande del och deriverande
Rs) + Σ Es) Regulator G s) R Us) Process G s) P Ys) Figur : Blockdiagram för ett typiskt reglersystem Något om PID-reglering PID-regulatorn består av proportionell del, integrerande del och deriverande
TENTAMEN I TSRT22 REGLERTEKNIK
 SAL: TENTAMEN I TSRT22 REGLERTEKNIK TID: 27--23 kl. 8:-3: KURS: TSRT22 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Svante Gunnarsson, tel. 3-28747,7-3994847 BESÖKER SALEN:
SAL: TENTAMEN I TSRT22 REGLERTEKNIK TID: 27--23 kl. 8:-3: KURS: TSRT22 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Svante Gunnarsson, tel. 3-28747,7-3994847 BESÖKER SALEN:
TSRT91 Reglerteknik: Föreläsning 5
 TSRT9 Reglerteknik: Föreläsning 5 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar / 23 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT9 Reglerteknik: Föreläsning 5 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar / 23 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Figur 2: Bodediagrammets amplitudkurva i uppgift 1d
 Lösningsförslag till tentamen i Reglerteknik Y (för Y och D) (TSRT) 008-06-0. (a) Vi har systemet G(s) (s3)(s) samt insignalen u(t) sin(t). Systemet är stabilt ty det har sina poler i s 3 samt s. Vi kan
Lösningsförslag till tentamen i Reglerteknik Y (för Y och D) (TSRT) 008-06-0. (a) Vi har systemet G(s) (s3)(s) samt insignalen u(t) sin(t). Systemet är stabilt ty det har sina poler i s 3 samt s. Vi kan
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24-4-22 Sal () TER2,TER3,TERF (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24-4-22 Sal () TER2,TER3,TERF (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Från tidigare: Systemets poler (rötterna till kar. ekv.) påverkar egenskaperna hos diffekvationens lösning.
 påverkar egenskaperna hos diffekvationens lösning.") Föreläsning 4 Stabilitet (2.5) Från tidigare: Systemets poler (rötterna till kar. ekv.) påverkar egenskaperna hos diffekvationens lösning. Definition av insignal-utsignalstabilitet: OH-bild Sats 2.1: OH-bild
Föreläsning 4 Stabilitet (2.5) Från tidigare: Systemets poler (rötterna till kar. ekv.) påverkar egenskaperna hos diffekvationens lösning. Definition av insignal-utsignalstabilitet: OH-bild Sats 2.1: OH-bild
Reglerteknik I: F1. Introduktion. Dave Zachariah. Inst. Informationsteknologi, Avd. Systemteknik
 Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars
Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars
TENTAMEN Reglerteknik 4.5hp X3
 OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 4.5hp för X3. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans
OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 4.5hp för X3. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans
TENTAMEN Reglerteknik 3p, X3
 OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 3p. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 3p. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
1RT490 Reglerteknik I 5hp Tentamen: Del B
 RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Tisdag 23 oktober 208, kl. 4.00-7.00 Plats: Polacksbackens skrivsal Ansvarig lärare: Hans Rosth, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl
RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Tisdag 23 oktober 208, kl. 4.00-7.00 Plats: Polacksbackens skrivsal Ansvarig lärare: Hans Rosth, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl
Laplace, Fourier och resten varför alla dessa transformer?
 Laplace, Fourier och resten varför alla dessa transformer? 1 Bakgrund till transformer i kontinuerlig tid Idé 1: Representera in- och utsignaler till LTI-system i samma basfunktion Förenklad analys! Idé
Laplace, Fourier och resten varför alla dessa transformer? 1 Bakgrund till transformer i kontinuerlig tid Idé 1: Representera in- och utsignaler till LTI-system i samma basfunktion Förenklad analys! Idé
TENTAMEN I TSRT19 REGLERTEKNIK
 SAL: XXXXX TENTAMEN I TSRT9 REGLERTEKNIK TID: 25-8-2 kl. 8:-3: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Inger Erlander Klein, tel. 3-28665,73-9699 BESÖKER
SAL: XXXXX TENTAMEN I TSRT9 REGLERTEKNIK TID: 25-8-2 kl. 8:-3: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Inger Erlander Klein, tel. 3-28665,73-9699 BESÖKER
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
Kort introduktion till Reglerteknik I
 Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars egenskaper vi vill studera/styra. Vi betraktar system som har
Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars egenskaper vi vill studera/styra. Vi betraktar system som har
Välkomna till TSRT19 Reglerteknik M Föreläsning 8
 Välkomna till TSRT19 Reglerteknik M Föreläsning 8 Sammanfattning av föreläsning 7 Kretsformning Lead-lag design Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet) Sammanfattning av förra
Välkomna till TSRT19 Reglerteknik M Föreläsning 8 Sammanfattning av föreläsning 7 Kretsformning Lead-lag design Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet) Sammanfattning av förra
Industriella styrsystem, TSIU06. Föreläsning 1
 Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Utgångspunkter Vad? Varför? Hur? Vad? Reglerteknik - Konsten att styra system automatiskt Vad? System - Ett objekt
Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Utgångspunkter Vad? Varför? Hur? Vad? Reglerteknik - Konsten att styra system automatiskt Vad? System - Ett objekt
1RT490 Reglerteknik I 5hp Tentamen: Del B
 RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Torsdag 5 december 206, kl. 3.00-6.00 Plats: Fyrislundsgatan 80, sal Ansvarig lärare: Fredrik Olsson, tel. 08-47 7840. Fredrik kommer och svarar på frågor
RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Torsdag 5 december 206, kl. 3.00-6.00 Plats: Fyrislundsgatan 80, sal Ansvarig lärare: Fredrik Olsson, tel. 08-47 7840. Fredrik kommer och svarar på frågor
TENTAMEN I REGLERTEKNIK
 TENTAMEN I REGLERTEKNIK SAL: T,T2 KÅRA TID: januari 27, klockan 8-3 KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 9.3,.3 KURSADMINISTRATÖR:
TENTAMEN I REGLERTEKNIK SAL: T,T2 KÅRA TID: januari 27, klockan 8-3 KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 9.3,.3 KURSADMINISTRATÖR:
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Kortfattade lösningsförslag till tentamen , kl
 REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL20 Kortfattade lösningsförslag till tentamen 202 2 7, kl. 9.00 4.00. (a) (i) Överföringsfunktionen ges av G(s)U(s) = G 0 (s)u(s)+g (s)(u(s)+g 0 (s)u(s)) = [G
REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL20 Kortfattade lösningsförslag till tentamen 202 2 7, kl. 9.00 4.00. (a) (i) Överföringsfunktionen ges av G(s)U(s) = G 0 (s)u(s)+g (s)(u(s)+g 0 (s)u(s)) = [G
Reglerteknik AK, FRTF05
 Institutionen för REGLERTEKNIK Reglerteknik AK, FRTF05 Tentamen 3 april 208 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
Institutionen för REGLERTEKNIK Reglerteknik AK, FRTF05 Tentamen 3 april 208 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
TENTAMEN: DEL A Reglerteknik I 5hp
 TENTAMEN: DEL A Reglerteknik I 5hp Tid: Torsdag 9 december 03, kl. 8.00-.00 Plats: Magistern Ansvarig lärare: Hans Norlander, tel. 08-473070. Tillåtna hjälpmedel: Kursboken (Glad-Ljung), miniräknare, Laplace-tabell
TENTAMEN: DEL A Reglerteknik I 5hp Tid: Torsdag 9 december 03, kl. 8.00-.00 Plats: Magistern Ansvarig lärare: Hans Norlander, tel. 08-473070. Tillåtna hjälpmedel: Kursboken (Glad-Ljung), miniräknare, Laplace-tabell
Välkomna till TSRT19 Reglerteknik Föreläsning 7
 Välkomna till TSRT19 Reglerteknik Föreläsning 7 Sammanfattning av föreläsning 6 Kretsformning Lead-lag design Labförberedande exempel Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet)
Välkomna till TSRT19 Reglerteknik Föreläsning 7 Sammanfattning av föreläsning 6 Kretsformning Lead-lag design Labförberedande exempel Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet)
Nyquistkriteriet. Henrik Sandberg. Extra material till Reglerteknik AK 19 maj 2014
 Nyquistkriteriet Henrik Sandberg Extra material till Reglerteknik AK 19 maj 2014 Upplägg Harry Nyquist Frekvensanalys i sluten loop Nyquistkriteriet Exempel Argumentvariationsprincipen Harry Nyquist (1889-1976)
Nyquistkriteriet Henrik Sandberg Extra material till Reglerteknik AK 19 maj 2014 Upplägg Harry Nyquist Frekvensanalys i sluten loop Nyquistkriteriet Exempel Argumentvariationsprincipen Harry Nyquist (1889-1976)
TSIU61: Reglerteknik. Sammanfattning av kursen. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 12 Sammanfattning av kursen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 12 Gustaf Hendeby HT1 2017 1 / 56 Innehåll föreläsning 12: 1. Reglerproblemet 2. Modellbygge
TSIU61: Reglerteknik Föreläsning 12 Sammanfattning av kursen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 12 Gustaf Hendeby HT1 2017 1 / 56 Innehåll föreläsning 12: 1. Reglerproblemet 2. Modellbygge
Välkomna till TSRT19 Reglerteknik M Föreläsning 7. Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet
 Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
ERE103 Reglerteknik D Tentamen
 CHALMERS TEKNISKA HÖGSKOLA Institutionen för signaler och system System- och reglerteknik ERE03 Reglerteknik D Tentamen 207-0-2 08.30-2.30 Examinator: Jonas Fredriksson, tel 359. Tillåtna hjälpmedel: Typgodkänd
CHALMERS TEKNISKA HÖGSKOLA Institutionen för signaler och system System- och reglerteknik ERE03 Reglerteknik D Tentamen 207-0-2 08.30-2.30 Examinator: Jonas Fredriksson, tel 359. Tillåtna hjälpmedel: Typgodkänd
Fredrik Lindsten Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
") Innehåll föreläsning 12 2 Reglerteknik, föreläsning 12 Sammanfattning av kursen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Innehåll föreläsning 12 2 Reglerteknik, föreläsning 12 Sammanfattning av kursen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Reglerteknik AK. Tentamen kl
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 20 0 20 kl 8.00 3.00 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 20 0 20 kl 8.00 3.00 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
INLÄMNINGSUPPGIFT I. REGLERTEKNIK I för STS3 & X4
 SYSTEMTEKNIK, IT-INSTITUTIONEN UPPSALA UNIVERSITET DZ 2015-09 INLÄMNINGSUPPGIFTER REGLERTEKNIK I för STS3 & X4 INLÄMNINGSUPPGIFT I Inlämning: Senast fredag den 2:a oktober kl 15.00 Lämnas i fack nr 30,
SYSTEMTEKNIK, IT-INSTITUTIONEN UPPSALA UNIVERSITET DZ 2015-09 INLÄMNINGSUPPGIFTER REGLERTEKNIK I för STS3 & X4 INLÄMNINGSUPPGIFT I Inlämning: Senast fredag den 2:a oktober kl 15.00 Lämnas i fack nr 30,
Föreläsning 8, Introduktion till tidsdiskret reglering, Z-transfomer, Överföringsfunktioner
 Föreläsning 8, Introduktion till tidsdiskret reglering, Z-transfomer, Överföringsfunktioner Reglerteknik, IE1304 1 / 24 Innehåll 1 2 3 4 2 / 24 Innehåll 1 2 3 4 3 / 24 Vad är tidsdiskret reglering? Regulatorn
Föreläsning 8, Introduktion till tidsdiskret reglering, Z-transfomer, Överföringsfunktioner Reglerteknik, IE1304 1 / 24 Innehåll 1 2 3 4 2 / 24 Innehåll 1 2 3 4 3 / 24 Vad är tidsdiskret reglering? Regulatorn
TENTAMEN Reglerteknik I 5hp
 OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller Reglerteknik I 5hp för F4/IT4/STS3. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller Reglerteknik I 5hp för F4/IT4/STS3. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
Reglerteknik AK. Tentamen 27 oktober 2015 kl 8-13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 27 oktober 205 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 27 oktober 205 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
1RT490 Reglerteknik I 5hp Tentamen: Del A Tid: Onsdag 23 augusti 2017, kl
 Tentamenskod Klockslag för inlämning Utbildningsprogram Bordnummer RT490 Reglerteknik I 5hp Tentamen: Del A Tid: Onsdag 23 augusti 207, kl. 4.00-7.00 Plats: Fyrislundsgatan 80, sal Ansvarig lärare: Hans
Tentamenskod Klockslag för inlämning Utbildningsprogram Bordnummer RT490 Reglerteknik I 5hp Tentamen: Del A Tid: Onsdag 23 augusti 207, kl. 4.00-7.00 Plats: Fyrislundsgatan 80, sal Ansvarig lärare: Hans