Välkomna till TSRT19 Reglerteknik Föreläsning 5. Sammanfattning av föreläsning 4 Frekvensanalys Bodediagram
|
|
|
- Niklas Ekström
- för 5 år sedan
- Visningar:
Transkript
1 Välkomna till TSRT19 Reglerteknik Föreläsning 5 Sammanfattning av föreläsning 4 Frekvensanalys Bodediagram
2 Sammanfattning av förra föreläsningen 2 Givet ett polpolynom med en varierande parameter, och dess karakteristiska ekvation P(s)+KQ(s)=0 Vi kan illustrera polernas position som funktion av parametern K genom att rita en rotort En approximativ rotort kan skissas genom att använda lite enkla regler
3 Sammanfattning av förra föreläsningen 3 Lösningstiden är ungefär 3/(avstånd till origo för poler närmast origo) för system med realla poler och oscillerande system med en bra relativ dämpning ξ (typiskt mellan 0.5 and 1) En relativ dämpning ξ på 0.7 ger en översläng på runt 5%, vilket typiskt är vad man vill ha. Im 45º Re Nollställen är kul men svåra att analysera
4 Frekvenssvar 4
5 Frekvenssvar 5
 skickas till högtalaren En")

 men")
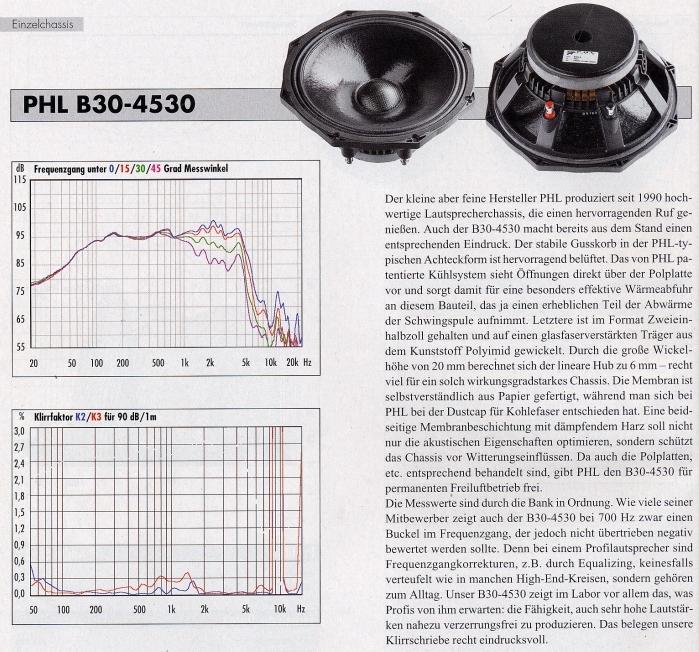
6 Frekvenssvar 6 Högtalartest: En testsignal (en sinusformad spänning) skickas till högtalaren En mikrofon mäter ljudet och registrerar förstärkningen från spänningsstyrka till ljudvolym. Typiska fenomen: Mätsignalen (ljudet) har samma frekvens (skulle låta väldigt illa annars) men förstärkningen beror på frekvensen

 i meter) kan approximativt beskrivas med")
7 Frekvenssvar 7 Liknande experiment kan utföras på alla system med insignaler Bilslalom: Vi testar att röra ratten i en sinussignal, och registrerar bilens laterala position (avstånd från mittlinjen) Bildynamiken (från rattutslag u(t) i radianer till lateral position y(t) i meter) kan approximativt beskrivas med följande linjära system


8 Frekvenssvar 8 Insignal: Utsignal: Sinussignal med en amplitud på ungefär 3 meter

9 Frekvenssvar 9 Insignal: Utsignal: Sinussignal med en amplitud på ungefär 80 centimeter

10 Frekvenssvar 10 Insignal: Utsignal: Sinussignal med en amplitud på ungefär 6 meter
11 Frekvenssvar 11 Experimentellt underbyggd tes: Sinussignal in ger en sinussignal ut (asymptotiskt efter att effekter av begynnelsetillståndet försvunnit)

12 Frekvenssvar 12 Linjära system beskrivs av differentialekvationer vars lösningar skapas via den homogena delen (som beror på begynnelsetillstånd) samt den partikulära delen som beror på insignalen Antag nu att en sinussignal legat på systemet sedan t=- Den homogena delen har då försvunnit vid t=0 och vi kan använda faltningsteoremet för Laplacetransformer (sid 30 i boken)

 och fasförskjuts")
13 Frekvenssvar 13 En sinussignal med frekvens ω som skickas in i ett linjärt system G(s) förstärks med en faktor G(iω) och fasförskjuts arg(g(iω)) radianer


14 Frekvenssvar 14 Om vi använder denna formel får vi följande förstärkning och fasförskjutning för bildynamiken
15 Frekvenssvar 15 Fasändring
16 Frekvenssvar 16 Bilens förstärkning från rattutslag till lateral position
17 Bodediagram 17 Amplitudförstärkningskurvor blir ofta ganska svårtolkade i linjär-linjär plot, istället ritar man amplitudkurvan i log-log skala. Vidare så multiplicerar man ofta förstärkningen med 20 för att erhålla en decibelskala Dvs, vi plottar 20 log G(iω) med en logaritmiskt växande frekvens Detta kallas för ett Bodediagram. Vi skall nu lära oss att skissa Bodediagram





18 Bodediagram 18 Antag att systemet är givet i följande faktoriserade form (dvs n poler, p integratorer och m nollställen enkelt synliga) Amplitud och fas:
 När vi ökar frekvensen kommer de andra termerna bli allt större, och till")
19 Bodediagram Skissmetod: Börja med väldigt små frekvenser. 19 Denna funktion är linjär i log-log skala, med lutning p (dvs den faller med p*20db per decad, om vi konverterar till db) När vi ökar frekvensen kommer de andra termerna bli allt större, och till slut måste vi även ta hänsyn till dem. När ω närmar sig ett nollställe eller en pol, måste även motsvarande term tas med, eftersom termer av typen då blir signifikant stora När en sådan term läggs till, byter amplitudkurvan riktning, och minskar antingen lutningen med en enhet (om en pol passeras) eller ökar riktningen med en enhet (om ett nollställe passeras)

 - radianer Faskurvan är typiskt svårare att")
20 Bodediagram 20 För små frekvenser även ungefär När vi ökar frekvensen kommer de andra termerna bli allt större även här Ett stabilt nollställe ger en fasavancering på (asymptotiskt) radianer och en stabil pol ger en fasförlust på (asymptotiskt) - radianer Faskurvan är typiskt svårare att rita manuellt


21 Bodediagram 21
22 Bodediagram 22


23 Bodediagram 23 Komplexa rötter är svårare att rita manuellt. Vad som händer är att man får en resonansfrekvens, där insignaler förstärks extra mycket Denna uppträder nära ω 0, och dess höjd beror på relativa dämpningen ξ
24 Periodiska signaler 24 Varför är vi egentligen intresserade av frekvenssvar? Vi har ju kanske helt andra, mer generella, signaler i verkligheten Anledningen är att alla periodiska signaler med periodtid T kan skrivas som en summa av sinus- och cosinussignaler med vinkelfrekvenserna nω 0 där ω 0 =(2π/T) och n=0,1,2, Detta kallas en Fourierserie
 Om relativa dämpningen ξ är låg så kommer vi få en signifikant resonansfrekvens vid ω 0, vilket gör att G(jω 0 )")
25 Periodiska signaler 25 Exempel: Vi har ett linjärt system Som insignal använder vi en fyrkantsvåg med frekvensen ω 0. Denna kan Fourierserieutvecklas Vi får som utsignal (asymptotiskt) Om relativa dämpningen ξ är låg så kommer vi få en signifikant resonansfrekvens vid ω 0, vilket gör att G(jω 0 ) blir stor. Således kommer första sinustermen att dominera utsignalen
26 Sammanfattning 26 Sammanfattning av dagens föreläsning Ett system kan analyseras och utvärderas efter hur det svara på en sinusformad insignal. Alla linjära system som drivs med en sinusformad insignal ger en sinusformad utsignal med samma frekvens, men med en annan amplitud och fas Ett diagram som visar denna amplitudförstärkning och fasförskjutning kallas ett Bodediagram Bodediagram ritas i log-log-skala då detta tydligare åskådliggör vissa egenskaper i amplitudkurvan En pol böjer amplitudkurvan nedåt i Bodediagrammet, medan ett nollställe böjer upp amplitudkurvan
27 Sammanfattning 27 Viktiga begrepp Frekvenssvar: Utsignalen från ett system då insignalen är en sinussignal. Bodediagram: Diagram som visar amplitudförstärkning och fasförskjutning av en sinussignal för ett linjärt system. Ritas oftast i log-log (för amplitudförstärkning) och log-linjär (för fas) skala Resonansfrekvens: Frekvens för vilken insignaler förstärks extra mycket Resonanstopp: Den puckel som syns i ett Bodediagram vid en resonansfrekvensen
TSIU61: Reglerteknik. Frekvensbeskrivning Bodediagram. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 5 Gustaf Hendeby HT1 2017 1 / 1 Innehåll föreläsning 5 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 5 Gustaf Hendeby HT1 2017 1 / 1 Innehåll föreläsning 5 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik. de(t) dt + K D. Sammanfattning från föreläsning 4 (2/3) Frekvensbeskrivning. ˆ Bodediagram. Proportionell }{{} Integrerande
 dt + K D. Sammanfattning från föreläsning 4 (2/3) Frekvensbeskrivning. ˆ Bodediagram. Proportionell }{{} Integrerande") TSIU6 Föreläsning 5 Gustaf Hendeby HT 207 / 25 Innehåll föreläsning 5 TSIU6: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby ˆ Sammanfattning av föreläsning 4 ˆ Introduktion till
TSIU6 Föreläsning 5 Gustaf Hendeby HT 207 / 25 Innehåll föreläsning 5 TSIU6: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby ˆ Sammanfattning av föreläsning 4 ˆ Introduktion till
Välkomna till TSRT19 Reglerteknik Föreläsning 6. Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 6 Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden! Sammanfattning av förra föreläsningen 2 G(s) Sinus in (i stabilt system) ger sinus
Välkomna till TSRT19 Reglerteknik Föreläsning 6 Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden! Sammanfattning av förra föreläsningen 2 G(s) Sinus in (i stabilt system) ger sinus
Frekvensbeskrivning, Bodediagram
 Innehåll föreläsning 5 Reglerteknik I: Föreläsning 5 Frekvensbeskrivning, Bodediagram Fredrik Lindsten fredrik.lindsten@it.uu.se Kontor 2236, ITC Hus 2, Systemteknik Institutionen för informationsteknologi
Innehåll föreläsning 5 Reglerteknik I: Föreläsning 5 Frekvensbeskrivning, Bodediagram Fredrik Lindsten fredrik.lindsten@it.uu.se Kontor 2236, ITC Hus 2, Systemteknik Institutionen för informationsteknologi
Reglerteknik I: F6. Bodediagram, Nyquistkriteriet. Dave Zachariah. Inst. Informationsteknologi, Avd. Systemteknik
 Reglerteknik I: F6 Bodediagram, Nyquistkriteriet Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 11 Frekvensegenskaper Hur svarar ett (slutet) system på oscillerande signaler? 2 / 11
Reglerteknik I: F6 Bodediagram, Nyquistkriteriet Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 11 Frekvensegenskaper Hur svarar ett (slutet) system på oscillerande signaler? 2 / 11
Frekvensbeskrivning, Bodediagram
 Innehåll föreläsning 5 Reglerteknik, föreläsning 5 Frekvensbeskrivning, Bodediagram Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Innehåll föreläsning 5 Reglerteknik, föreläsning 5 Frekvensbeskrivning, Bodediagram Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Välkomna till TSRT19 Reglerteknik Föreläsning 8. Sammanfattning av föreläsning 7 Framkoppling Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
Välkomna till TSRT19 Reglerteknik Föreläsning 4. Sammanfattning av föreläsning 3 Rotort Mer specifikationer Nollställen (om vi hinner)
") Välkomna till TSRT19 Reglerteknik Föreläsning 4 Sammanfattning av föreläsning 3 Rotort Mer specifikationer Nollställen (om vi hinner) Sammanfattning av förra föreläsningen 2 Vi introducerade PID-regulatorn
Välkomna till TSRT19 Reglerteknik Föreläsning 4 Sammanfattning av föreläsning 3 Rotort Mer specifikationer Nollställen (om vi hinner) Sammanfattning av förra föreläsningen 2 Vi introducerade PID-regulatorn
Välkomna till TSRT19 Reglerteknik Föreläsning 7
 Välkomna till TSRT19 Reglerteknik Föreläsning 7 Sammanfattning av föreläsning 6 Kretsformning Lead-lag design Labförberedande exempel Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet)
Välkomna till TSRT19 Reglerteknik Föreläsning 7 Sammanfattning av föreläsning 6 Kretsformning Lead-lag design Labförberedande exempel Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet)
TSRT19 Reglerteknik: Välkomna!
 TSRT9 Reglerteknik: Välkomna! Föreläsning 6 Inger Erlander Klein / 25 Förra föreläsningen (föreläsning 5) Rotort plotta rötternas (polernas) läge som fnktion av någon parameter Bakhjlsstyrda cykeln (&
TSRT9 Reglerteknik: Välkomna! Föreläsning 6 Inger Erlander Klein / 25 Förra föreläsningen (föreläsning 5) Rotort plotta rötternas (polernas) läge som fnktion av någon parameter Bakhjlsstyrda cykeln (&
Nyquistkriteriet, kretsformning
 Sammanfattning från föreläsning 5 2 Reglerteknik I: Föreläsning 6 Nyquistkriteriet, kretsformning Fredrik Lindsten fredrik.lindsten@it.uu.se Kontor 2236, ITC Hus 2, Systemteknik Institutionen för informationsteknologi
Sammanfattning från föreläsning 5 2 Reglerteknik I: Föreläsning 6 Nyquistkriteriet, kretsformning Fredrik Lindsten fredrik.lindsten@it.uu.se Kontor 2236, ITC Hus 2, Systemteknik Institutionen för informationsteknologi
Välkomna till TSRT19 Reglerteknik M Föreläsning 8
 Välkomna till TSRT19 Reglerteknik M Föreläsning 8 Sammanfattning av föreläsning 7 Kretsformning Lead-lag design Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet) Sammanfattning av förra
Välkomna till TSRT19 Reglerteknik M Föreläsning 8 Sammanfattning av föreläsning 7 Kretsformning Lead-lag design Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet) Sammanfattning av förra
Frekvenssvaret är utsignalen då insginalen är en sinusvåg med frekvens ω och amplitud A,
 Övning 8 Introduktion Varmt välkomna till åttonde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Frekvenssvar Frekvenssvaret är utsignalen då insginalen är en sinusvåg med frekvens
Övning 8 Introduktion Varmt välkomna till åttonde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Frekvenssvar Frekvenssvaret är utsignalen då insginalen är en sinusvåg med frekvens
TSIU61: Reglerteknik. Sammanfattning från föreläsning 5 (2/4) Stabilitet Specifikationer med frekvensbeskrivning
 Stabilitet Specifikationer med frekvensbeskrivning") TSIU6 Föreläsning 6 Gustaf Hendeby HT 206 / 7 Innehåll föreläsning 6 TSIU6: Reglerteknik Föreläsning 6 Stabilitet Specifikationer med frekvensbeskrivning Gustaf Hendeby ˆ Sammanfattning av föreläsning
TSIU6 Föreläsning 6 Gustaf Hendeby HT 206 / 7 Innehåll föreläsning 6 TSIU6: Reglerteknik Föreläsning 6 Stabilitet Specifikationer med frekvensbeskrivning Gustaf Hendeby ˆ Sammanfattning av föreläsning
Kap 3 - Tidskontinuerliga LTI-system. Användning av Laplacetransformen för att beskriva LTI-system: Samband poler - respons i tidsplanet
 Kap 3 - Tidskontinuerliga LTI-system Användning av Laplacetransformen för att beskriva LTI-system: Överföringsfunktion Poler, nollställen, stabilitet Samband poler - respons i tidsplanet Slut- och begynnelsevärdesteoremen
Kap 3 - Tidskontinuerliga LTI-system Användning av Laplacetransformen för att beskriva LTI-system: Överföringsfunktion Poler, nollställen, stabilitet Samband poler - respons i tidsplanet Slut- och begynnelsevärdesteoremen
Kompletterande material till föreläsning 5 TSDT08 Signaler och System I. Erik G. Larsson LiU/ISY/Kommunikationssystem
 ompletterande material till föreläsning 5 TSDT8 Signaler och System I Erik G. Larsson LiU/ISY/ommunikationssystem erik.larsson@isy.liu.se November 8 5.1. Första och andra ordningens tidskontinuerliga LTI
ompletterande material till föreläsning 5 TSDT8 Signaler och System I Erik G. Larsson LiU/ISY/ommunikationssystem erik.larsson@isy.liu.se November 8 5.1. Första och andra ordningens tidskontinuerliga LTI
Välkomna till TSRT15 Reglerteknik Föreläsning 2
 Välkomna till TSRT15 Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till TSRT15 Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till Reglerteknik Föreläsning 2
 Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Reglerteknik AK. Tentamen 24 oktober 2016 kl 8-13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Figur 2: Bodediagrammets amplitudkurva i uppgift 1d
 Lösningsförslag till tentamen i Reglerteknik Y (för Y och D) (TSRT) 008-06-0. (a) Vi har systemet G(s) (s3)(s) samt insignalen u(t) sin(t). Systemet är stabilt ty det har sina poler i s 3 samt s. Vi kan
Lösningsförslag till tentamen i Reglerteknik Y (för Y och D) (TSRT) 008-06-0. (a) Vi har systemet G(s) (s3)(s) samt insignalen u(t) sin(t). Systemet är stabilt ty det har sina poler i s 3 samt s. Vi kan
Cirkelkriteriet (12.3)
") Föreläsning 3-4 Cirkelkriteriet (12.3) En situation där global stabilitetsanalys kan utföras. r + u G(s) y f( ) där f( ) är en statisk olinjäritet, t ex f(y) = 1 y 0 1 y < 0 eller Antag att: f(y) = y 2
Föreläsning 3-4 Cirkelkriteriet (12.3) En situation där global stabilitetsanalys kan utföras. r + u G(s) y f( ) där f( ) är en statisk olinjäritet, t ex f(y) = 1 y 0 1 y < 0 eller Antag att: f(y) = y 2
Reglerteknik AK Tentamen
 Reglerteknik AK Tentamen 20-0-7 Lösningsförslag Uppgift a Svar: G(s) = Uppgift b G c (s) = G(s) = C(sI A) B + D = s. (s+)(s+2) Slutna systemets pol blir s (s + )(s + 2). G o(s) + G o (s) = F (s)g(s) +
Reglerteknik AK Tentamen 20-0-7 Lösningsförslag Uppgift a Svar: G(s) = Uppgift b G c (s) = G(s) = C(sI A) B + D = s. (s+)(s+2) Slutna systemets pol blir s (s + )(s + 2). G o(s) + G o (s) = F (s)g(s) +
TSIU61: Reglerteknik. Sammanfattning av kursen. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 12 Sammanfattning av kursen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 12 Gustaf Hendeby HT1 2017 1 / 56 Innehåll föreläsning 12: 1. Reglerproblemet 2. Modellbygge
TSIU61: Reglerteknik Föreläsning 12 Sammanfattning av kursen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 12 Gustaf Hendeby HT1 2017 1 / 56 Innehåll föreläsning 12: 1. Reglerproblemet 2. Modellbygge
Välkomna till TSRT19 Reglerteknik M Föreläsning 7. Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet
 Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
TSRT91 Reglerteknik: Föreläsning 4
 TSRT91 Reglerteknik: Föreläsning 4 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 16 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT91 Reglerteknik: Föreläsning 4 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 16 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Lösningsförslag till tentamen i Reglerteknik Y/D (TSRT12)
") Lösningsförslag till tentamen i Reglerteknik Y/D (TSRT) 0-03-8. (a) Nolställen: - (roten till (s + ) 0 ) Poler: -, -3 (rötterna till (s + )(s + 3) 0) Eftersom alla poler har strikt negativ realdel är systemet
Lösningsförslag till tentamen i Reglerteknik Y/D (TSRT) 0-03-8. (a) Nolställen: - (roten till (s + ) 0 ) Poler: -, -3 (rötterna till (s + )(s + 3) 0) Eftersom alla poler har strikt negativ realdel är systemet
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-- Sal () T,T2,KÅRA (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-- Sal () T,T2,KÅRA (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
För att förenkla presentationen antas inledningsvis att förstärkningen K 0, och vi återkommer till negativt K senare.
 8. Frekvensanalys För att förenkla presentationen antas inledningsvis att förstärkningen K 0, oh vi återkommer till negativt K senare. 8.1. Första ordningens system K y( s u( s Ts 1 Om vi antar att insignalen
8. Frekvensanalys För att förenkla presentationen antas inledningsvis att förstärkningen K 0, oh vi återkommer till negativt K senare. 8.1. Första ordningens system K y( s u( s Ts 1 Om vi antar att insignalen
Föreläsning 10, Egenskaper hos tidsdiskreta system
 Föreläsning 10, Egenskaper hos tidsdiskreta system Reglerteknik, IE1304 1 / 26 Innehåll Kapitel 18.1. Skillnad mellan analog och digital reglering 1 Kapitel 18.1. Skillnad mellan analog och digital reglering
Föreläsning 10, Egenskaper hos tidsdiskreta system Reglerteknik, IE1304 1 / 26 Innehåll Kapitel 18.1. Skillnad mellan analog och digital reglering 1 Kapitel 18.1. Skillnad mellan analog och digital reglering
Reglerteknik AK. Tentamen kl
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 20 0 20 kl 8.00 3.00 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 20 0 20 kl 8.00 3.00 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
TENTAMEN I REGLERTEKNIK TSRT03, TSRT19
 TENTAMEN I REGLERTEKNIK TSRT3, TSRT9 TID: 23 april 29, klockan 4-9 KURS: TSRT3, TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 5.3, 7.3 KURSADMINISTRATÖR:
TENTAMEN I REGLERTEKNIK TSRT3, TSRT9 TID: 23 april 29, klockan 4-9 KURS: TSRT3, TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 5.3, 7.3 KURSADMINISTRATÖR:
Lösningar Reglerteknik AK Tentamen
 Lösningar Reglerteknik AK Tentamen 15 1 3 Uppgift 1a Systemet är stabilt ( pol i ), så vi kan använda slutvärdesteoremet för att bestämma Svar: l = lim y(t) = lim sg(s)1 t s s = G()1 = 5l = r = 1 Uppgift
Lösningar Reglerteknik AK Tentamen 15 1 3 Uppgift 1a Systemet är stabilt ( pol i ), så vi kan använda slutvärdesteoremet för att bestämma Svar: l = lim y(t) = lim sg(s)1 t s s = G()1 = 5l = r = 1 Uppgift
Laplacetransform, poler och nollställen
 Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Välkomna till TSRT15 Reglerteknik Föreläsning 12
 Välkomna till TSRT15 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Återkoppling av skattade tillstånd Integralverkan Återblick på kursen Sammanfattning föreläsning 11 2 Tillstånden innehåller
Välkomna till TSRT15 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Återkoppling av skattade tillstånd Integralverkan Återblick på kursen Sammanfattning föreläsning 11 2 Tillstånden innehåller
TSRT91 Reglerteknik: Föreläsning 4
 Föreläsningar 1 / 16 TSRT91 glerteknik: Föreläsning 4 Martin Enqvist glerteknik Institutionen för systemteknik Linköpings universitet 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar 1 / 16 TSRT91 glerteknik: Föreläsning 4 Martin Enqvist glerteknik Institutionen för systemteknik Linköpings universitet 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
1RT490 Reglerteknik I 5hp Tentamen: Del B
 RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Tisdag 23 oktober 208, kl. 4.00-7.00 Plats: Polacksbackens skrivsal Ansvarig lärare: Hans Rosth, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl
RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Tisdag 23 oktober 208, kl. 4.00-7.00 Plats: Polacksbackens skrivsal Ansvarig lärare: Hans Rosth, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl
Övning 3. Introduktion. Repetition
 Övning 3 Introduktion Varmt välkomna till tredje övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Nästa gång är det datorövning. Kontrollera att ni kan komma in i XQ-salarna. Endast en kort genomgång,
Övning 3 Introduktion Varmt välkomna till tredje övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Nästa gång är det datorövning. Kontrollera att ni kan komma in i XQ-salarna. Endast en kort genomgång,
Föreläsning 3. Reglerteknik AK. c Bo Wahlberg. 9 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 3 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 9 september 2013 Introduktion Förra gången: PID-reglering Dagens program: Stabilitet Rotort
Föreläsning 3 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 9 september 2013 Introduktion Förra gången: PID-reglering Dagens program: Stabilitet Rotort
Innehνall 1 Introduktion Processbeskrivning Inloggning och uppstart
 UPPSALA UNIVERSITET SYSTEMTEKNIK EKL och PSA, 2002 Dynamiska System (STS) Modellering av en DC-motor Sammanfattning Dynamiken för en dc-motor bestäms utifrνan en s k icke-parametrisk modellering, i detta
UPPSALA UNIVERSITET SYSTEMTEKNIK EKL och PSA, 2002 Dynamiska System (STS) Modellering av en DC-motor Sammanfattning Dynamiken för en dc-motor bestäms utifrνan en s k icke-parametrisk modellering, i detta
Sammanfattning TSRT mars 2017
 Sammanfattning TSRT2 3 mars 207 Innehåll Överföringsfunktion 4 2 Stegsvar, :a och 2:a ordningens system 4 2. Första ordningens system...................... 4 2.2 2:a ordningens system, poler.....................
Sammanfattning TSRT2 3 mars 207 Innehåll Överföringsfunktion 4 2 Stegsvar, :a och 2:a ordningens system 4 2. Första ordningens system...................... 4 2.2 2:a ordningens system, poler.....................
Välkomna till TSRT19 Reglerteknik Föreläsning 12
 Välkomna till TSRT19 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Integralverkan Återkoppling av skattade tillstånd Återblick på kursen LABFLYTT! 2 PGA felbokning datorsal så måste ett
Välkomna till TSRT19 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Integralverkan Återkoppling av skattade tillstånd Återblick på kursen LABFLYTT! 2 PGA felbokning datorsal så måste ett
Laplace, Fourier och resten varför alla dessa transformer?
 Laplace, Fourier och resten varför alla dessa transformer? 1 Bakgrund till transformer i kontinuerlig tid Idé 1: Representera in- och utsignaler till LTI-system i samma basfunktion Förenklad analys! Idé
Laplace, Fourier och resten varför alla dessa transformer? 1 Bakgrund till transformer i kontinuerlig tid Idé 1: Representera in- och utsignaler till LTI-system i samma basfunktion Förenklad analys! Idé
REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL En tillståndsmodell ges t.ex. av den styrbara kanoniska formen: s 2 +4s +1.
 REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL20 Lösningsförslag till tentamen 2009 2 5, kl. 4.00 9.00. (a) Laplacetransform av () ger s 2 Y (s)+4sy (s)+y (s) =U(s), och överföringsfunktionen blir G(s)
REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL20 Lösningsförslag till tentamen 2009 2 5, kl. 4.00 9.00. (a) Laplacetransform av () ger s 2 Y (s)+4sy (s)+y (s) =U(s), och överföringsfunktionen blir G(s)
ÖVNINGSTENTAMEN Modellering av dynamiska system 5hp
 ÖVNINGSTENTAMEN Modellering av dynamiska system 5hp Tid: Denna övn.tenta gås igenom 25 maj (5h skrivtid för den riktiga tentan) Plats: Ansvarig lärare: Bengt Carlsson Tillåtna hjälpmedel: Kurskompendiet
ÖVNINGSTENTAMEN Modellering av dynamiska system 5hp Tid: Denna övn.tenta gås igenom 25 maj (5h skrivtid för den riktiga tentan) Plats: Ansvarig lärare: Bengt Carlsson Tillåtna hjälpmedel: Kurskompendiet
TENTAMEN Modellering av dynamiska system 5hp
 TENTAMEN Modellering av dynamiska system 5hp - 0 Tid: måndag 8 Maj 0, kl 4-9 Plats: Polacksbacken Ansvarig lärare: Bengt Carlsson, tel 070-674590. Bengt kommer till tentasalen ca kl 6 och besvarar ev frågor.
TENTAMEN Modellering av dynamiska system 5hp - 0 Tid: måndag 8 Maj 0, kl 4-9 Plats: Polacksbacken Ansvarig lärare: Bengt Carlsson, tel 070-674590. Bengt kommer till tentasalen ca kl 6 och besvarar ev frågor.
Reglerteknik AK. Tentamen 9 maj 2015 kl 08 13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 9 maj 5 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt 5 poäng.
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 9 maj 5 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt 5 poäng.
Välkomna till TSRT19 Reglerteknik Föreläsning 3. Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula
 Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Laplace, Fourier och resten varför alla dessa transformer?
 Laplace, Fourier och resten varför alla dessa transformer? 1 Vi har sett hur ett LTI-system kan ges en komplett beskrivning av dess impulssvar. Genom att falta insignalen med impulssvaret erhålls systemets
Laplace, Fourier och resten varför alla dessa transformer? 1 Vi har sett hur ett LTI-system kan ges en komplett beskrivning av dess impulssvar. Genom att falta insignalen med impulssvaret erhålls systemets
TENTAMEN I REGLERTEKNIK
 TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
2 Ortogonala signaler. Fourierserier. Enkla filter.
 Ortogonala signaler. Fourierserier. Enkla filter. ktuella ekvationer: Se formelsamlingen och förberedelsehäftet. För effektivvärdet av en summa av N ortogonala signaler gäller: ν rms = ν rms1 + ν rms +...
Ortogonala signaler. Fourierserier. Enkla filter. ktuella ekvationer: Se formelsamlingen och förberedelsehäftet. För effektivvärdet av en summa av N ortogonala signaler gäller: ν rms = ν rms1 + ν rms +...
Lead-lag-reglering. Fundera på till den här föreläsningen. Fasavancerande (lead-) länk. Ex. P-regulator. Vi vill ha en regulator som uppfyller:
 länk. Ex. P-regulator. Vi vill ha en regulator som uppfyller:") TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby Sammanfattning av föreläsning 6 Regulatorsyntes
TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby Sammanfattning av föreläsning 6 Regulatorsyntes
Grundläggande signalbehandling
 Beskrivning av en enkel signal Sinussignal (Alla andra typer av signaler och ljud kan skapas genom att sätta samman sinussignaler med olika frekvens, Amplitud och fasvridning) Periodtid T y t U Amplitud
Beskrivning av en enkel signal Sinussignal (Alla andra typer av signaler och ljud kan skapas genom att sätta samman sinussignaler med olika frekvens, Amplitud och fasvridning) Periodtid T y t U Amplitud
Tentamen ssy080 Transformer, Signaler och System, D3
 Tentamen ssy080 Transformer, Signaler och System, D3 Examinator: Ants R. Silberberg 19 oktober 2011 kl. 08.30-12.30 sal: Hörsalsvägen Förfrågningar: Ants Silberberg, tel. 1808 Lösningar: Anslås torsdag
Tentamen ssy080 Transformer, Signaler och System, D3 Examinator: Ants R. Silberberg 19 oktober 2011 kl. 08.30-12.30 sal: Hörsalsvägen Förfrågningar: Ants Silberberg, tel. 1808 Lösningar: Anslås torsdag
Reglerteknik AK. Tentamen 27 oktober 2015 kl 8-13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 27 oktober 205 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 27 oktober 205 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Elektronik 2018 EITA35
 Elektronik 218 EITA35 Föreläsning 1 Filter Lågpassfilter Högpassfilter (Allpassfilter) Bodediagram Hambley 296-32 218-1-2 Föreläsning 1, Elektronik 218 1 Laboration 2 Förberedelseuppgifter! (Ingen anmälan
Elektronik 218 EITA35 Föreläsning 1 Filter Lågpassfilter Högpassfilter (Allpassfilter) Bodediagram Hambley 296-32 218-1-2 Föreläsning 1, Elektronik 218 1 Laboration 2 Förberedelseuppgifter! (Ingen anmälan
TSIU61: Reglerteknik. Lead-lag-regulatorn. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 ˆ Sammanfattning av
TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 ˆ Sammanfattning av
TENTAMEN Reglerteknik 3p, X3
 OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 3p. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 3p. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
Överföringsfunktion 21
 Vad är reglerteknik? 8 Analys och styrning av dynamiska system Välj styrsignalen (u(t)) så att systemet (mätsignalen y(t)) uppför sig som önskat (referenssignalen r(t)) trots störningar (v(t)) Vi betraktar
Vad är reglerteknik? 8 Analys och styrning av dynamiska system Välj styrsignalen (u(t)) så att systemet (mätsignalen y(t)) uppför sig som önskat (referenssignalen r(t)) trots störningar (v(t)) Vi betraktar
Figure 1: Blockdiagram. V (s) + G C (s)y ref (s) 1 + G O (s)
 + G C (s)y ref (s) 1 + G O (s)") Övning 9 Introduktion Varmt välkomna till nionde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Känslighetsfunktionen y ref + e u F (s) G(s) v + + y Figure : Blockdiagram Känslighetsfunktionen
Övning 9 Introduktion Varmt välkomna till nionde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Känslighetsfunktionen y ref + e u F (s) G(s) v + + y Figure : Blockdiagram Känslighetsfunktionen
TENTAMEN Reglerteknik 4.5hp X3
 OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 4.5hp för X3. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans
OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 4.5hp för X3. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans
Specifikationer i frekvensplanet ( )
") Föreläsning 7-8 Specifikationer i frekvensplanet (5.2-5.3) Återkopplat system: Enligt tidigare gäller att där och Y (s) =G C (s)r(s) G C (s) = G O(s) 1+G O (s) G O (s) =F (s)g(s) är det öppna systemet
Föreläsning 7-8 Specifikationer i frekvensplanet (5.2-5.3) Återkopplat system: Enligt tidigare gäller att där och Y (s) =G C (s)r(s) G C (s) = G O(s) 1+G O (s) G O (s) =F (s)g(s) är det öppna systemet
TSRT91 Reglerteknik: Föreläsning 2
 Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSIU61: Reglerteknik. Reglerproblemet. Innehåll föreläsning 12: 1. Reglerproblemet: Ex design av farthållare. Sammanfattning av kursen
 TSIU6: Reglerteknik Föreläsning 2 Sammanfattning av kursen gustaf.hendeby@liu.se TSIU6 Föreläsning 2 / 56 Innehåll föreläsning 2:. Reglerproblemet 2. Modellbygge ˆ Fysikalisk modell ˆ Identifiering (t
TSIU6: Reglerteknik Föreläsning 2 Sammanfattning av kursen gustaf.hendeby@liu.se TSIU6 Föreläsning 2 / 56 Innehåll föreläsning 2:. Reglerproblemet 2. Modellbygge ˆ Fysikalisk modell ˆ Identifiering (t
REGLERTEKNIK Laboration 5
 6 SAMPLADE SYSTEM 6. Sampling av signaler När man använder en dator som regulator, kan man endast behandla signaler i diskreta tidpunkter. T.ex. mäts systemets utsignal i tidpunkter med visst mellanrum,
6 SAMPLADE SYSTEM 6. Sampling av signaler När man använder en dator som regulator, kan man endast behandla signaler i diskreta tidpunkter. T.ex. mäts systemets utsignal i tidpunkter med visst mellanrum,
Lösningsförslag till tentamen i Reglerteknik (TSRT19)
") Lösningsförslag till tentamen i Reglerteknik (TSRT9) 26-3-6. (a) Systemet är stabilt och linjärt. Därmed kan principen sinus in, sinus ut tillämpas. Givet insignalen u(t) sin (t) sin ( t) har vi G(i )
Lösningsförslag till tentamen i Reglerteknik (TSRT9) 26-3-6. (a) Systemet är stabilt och linjärt. Därmed kan principen sinus in, sinus ut tillämpas. Givet insignalen u(t) sin (t) sin ( t) har vi G(i )
ÖVNINGSTENTAMEN Reglerteknik I 5hp
 ÖVNINGSTENTAMEN Reglerteknik I 5hp Tid: När det passar dig Plats: Där det passar dig Ansvarig lärare: Någon bra person. Tillåtna hjälpmedel: Kursboken (Glad-Ljung), miniräknare, Laplace-tabell och matematisk
ÖVNINGSTENTAMEN Reglerteknik I 5hp Tid: När det passar dig Plats: Där det passar dig Ansvarig lärare: Någon bra person. Tillåtna hjälpmedel: Kursboken (Glad-Ljung), miniräknare, Laplace-tabell och matematisk
Välkomna till TSRT19 Reglerteknik M Föreläsning 9
 Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning föreläsning 8 2 F(s) Lead-lag design:
Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning föreläsning 8 2 F(s) Lead-lag design:
Från tidigare: Systemets poler (rötterna till kar. ekv.) påverkar egenskaperna hos diffekvationens lösning.
 påverkar egenskaperna hos diffekvationens lösning.") Föreläsning 4 Stabilitet (2.5) Från tidigare: Systemets poler (rötterna till kar. ekv.) påverkar egenskaperna hos diffekvationens lösning. Definition av insignal-utsignalstabilitet: OH-bild Sats 2.1: OH-bild
Föreläsning 4 Stabilitet (2.5) Från tidigare: Systemets poler (rötterna till kar. ekv.) påverkar egenskaperna hos diffekvationens lösning. Definition av insignal-utsignalstabilitet: OH-bild Sats 2.1: OH-bild
Reglerteknik AK, FRT010
 Institutionen för REGLERTEKNIK Reglerteknik AK, FRT Tentamen januari 27 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK, FRT Tentamen januari 27 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Lösningsförslag till tentamen i Reglerteknik fk M (TSRT06)
") Lösningsförslag till tentamen i Reglerteknik fk M (TSRT6) 216-1-15 1. (a) Känslighetsfunktionen S(iω) beskriver hur systemstörningar och modellfel påverkar utsignalen från det återkopplade systemet. Oftast
Lösningsförslag till tentamen i Reglerteknik fk M (TSRT6) 216-1-15 1. (a) Känslighetsfunktionen S(iω) beskriver hur systemstörningar och modellfel påverkar utsignalen från det återkopplade systemet. Oftast
Tentamen ssy080 Transformer, Signaler och System, D3
 Tentamen ssy080 Transformer, Signaler och System, D3 Examinator: Ants R. Silberberg oktober 009 kl. 4.00-8.00 lokal: Johanneberg Förfrågningar: Ants Silberberg, tel. 808 Lösningar: Anslås torsdag okt.
Tentamen ssy080 Transformer, Signaler och System, D3 Examinator: Ants R. Silberberg oktober 009 kl. 4.00-8.00 lokal: Johanneberg Förfrågningar: Ants Silberberg, tel. 808 Lösningar: Anslås torsdag okt.
TENTAMEN I TSRT19 REGLERTEKNIK
 SAL: XXXXX TENTAMEN I TSRT9 REGLERTEKNIK TID: 25-8-2 kl. 8:-3: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Inger Erlander Klein, tel. 3-28665,73-9699 BESÖKER
SAL: XXXXX TENTAMEN I TSRT9 REGLERTEKNIK TID: 25-8-2 kl. 8:-3: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Inger Erlander Klein, tel. 3-28665,73-9699 BESÖKER
( ), så kan du lika gärna skriva H ( ω )! ( ) eftersom boken går igenom laplacetransformen före
, så kan du lika gärna skriva H ( ω )! ( ) eftersom boken går igenom laplacetransformen före") Några allmänna kommentarer gällande flera av lösningarna: Genomgående används kausala signaler och kausala system, vilket innebär att det är den enkelsidiga laplacetransformen som används. Bokens författare
Några allmänna kommentarer gällande flera av lösningarna: Genomgående används kausala signaler och kausala system, vilket innebär att det är den enkelsidiga laplacetransformen som används. Bokens författare
Nyquistkriteriet. Henrik Sandberg. Extra material till Reglerteknik AK 19 maj 2014
 Nyquistkriteriet Henrik Sandberg Extra material till Reglerteknik AK 19 maj 2014 Upplägg Harry Nyquist Frekvensanalys i sluten loop Nyquistkriteriet Exempel Argumentvariationsprincipen Harry Nyquist (1889-1976)
Nyquistkriteriet Henrik Sandberg Extra material till Reglerteknik AK 19 maj 2014 Upplägg Harry Nyquist Frekvensanalys i sluten loop Nyquistkriteriet Exempel Argumentvariationsprincipen Harry Nyquist (1889-1976)
i(t) C i(t) = dq(t) dt = C dy(t) dt y(t) + (4)
 C i(t) = dq(t) dt = C dy(t) dt y(t) + (4)") 2 Andra lektionen 2. Impulssvar 2.. En liten krets Beräkna impulssvaret för kretsen i figur genom att beräkna hur y(t) beror av x(t). R x(t) i(t) C y(t) Figur : Första ordningens lågpassfilter. Utsignalen
2 Andra lektionen 2. Impulssvar 2.. En liten krets Beräkna impulssvaret för kretsen i figur genom att beräkna hur y(t) beror av x(t). R x(t) i(t) C y(t) Figur : Första ordningens lågpassfilter. Utsignalen
Elektro och Informationsteknik LTH Laboration 4 Tidsplan, frekvensplan och impedanser
 Elektro och Informationsteknik LTH Laboration 4 Tidsplan, frekvensplan och impedanser Elektronik för D ETIA01 Andrés Alayon Glasunov Palmi Thor Thorbergsson Anders J Johansson Lund Mars 2009 Laboration
Elektro och Informationsteknik LTH Laboration 4 Tidsplan, frekvensplan och impedanser Elektronik för D ETIA01 Andrés Alayon Glasunov Palmi Thor Thorbergsson Anders J Johansson Lund Mars 2009 Laboration
Lösningar till Tentamen i Reglerteknik AK EL1000/EL1100/EL
 Lösningar till Tentamen i Reglerteknik AK EL000/EL00/EL20 20-0-3 a. Överföringsfunktionen från u(t) till y(t) ges av Utsignalen ges av G(s) = y(t) = G(iω) A sin(ωt + ϕ + arg G(iω)) = 2 sin(2t). Identifierar
Lösningar till Tentamen i Reglerteknik AK EL000/EL00/EL20 20-0-3 a. Överföringsfunktionen från u(t) till y(t) ges av Utsignalen ges av G(s) = y(t) = G(iω) A sin(ωt + ϕ + arg G(iω)) = 2 sin(2t). Identifierar
Välkomna till TSRT19 Reglerteknik Föreläsning 10
 Välkomna till TSRT19 Reglerteknik Föreläsning 10 Sammanfattning av föreläsning 9 Tillståndsbeskrivningar Överföringsfunktion vs tillståndmodell Stabilitet Styrbarhet och observerbarhet Sammanfattning föreläsning
Välkomna till TSRT19 Reglerteknik Föreläsning 10 Sammanfattning av föreläsning 9 Tillståndsbeskrivningar Överföringsfunktion vs tillståndmodell Stabilitet Styrbarhet och observerbarhet Sammanfattning föreläsning
Välkomna till TSRT19 Reglerteknik M Föreläsning 9
 Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning av förra föreläsningen H(s) W(s) 2 R(s)
Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning av förra föreläsningen H(s) W(s) 2 R(s)
TENTAMEN I REGLERTEKNIK Y TSRT12 för Y3 och D3. Lycka till!
 TENTAMEN I REGLERTEKNIK Y TSRT2 för Y3 och D3 TID: 7 mars 25, klockan 4-9. ANSVARIGA LÄRARE: Mikael Norrlöf, tel 28 27 4, Anna Hagenblad, tel 28 44 74 TILLÅTNA HJÄLPMEDEL: Läroboken Glad-Ljung: Reglerteknik,
TENTAMEN I REGLERTEKNIK Y TSRT2 för Y3 och D3 TID: 7 mars 25, klockan 4-9. ANSVARIGA LÄRARE: Mikael Norrlöf, tel 28 27 4, Anna Hagenblad, tel 28 44 74 TILLÅTNA HJÄLPMEDEL: Läroboken Glad-Ljung: Reglerteknik,
REGLERTEKNIK I BERÄKNINGSLABORATION 2
 UPPSALA UNIVERSITET Systemteknik/IT-institutionen HN 0608, 1001 REGLERTEKNIK I BERÄKNINGSLABORATION 2 1. Bode och Nyquistdiagram och stabilitetsmarginaler 2. Systemdynamik, stabilitet och rotort Förberedelseuppgifter:
UPPSALA UNIVERSITET Systemteknik/IT-institutionen HN 0608, 1001 REGLERTEKNIK I BERÄKNINGSLABORATION 2 1. Bode och Nyquistdiagram och stabilitetsmarginaler 2. Systemdynamik, stabilitet och rotort Förberedelseuppgifter:
REGLERTEKNIK, KTH. REGLERTEKNIK AK EL1000, EL1110 och EL1120
 REGLERTEKNIK, KTH REGLERTEKNIK AK EL1000, EL1110 och EL1120 Tentamen 20111017, kl 14:00 19:00 Hjälpmedel: Observandum: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande), räknetabeller,
REGLERTEKNIK, KTH REGLERTEKNIK AK EL1000, EL1110 och EL1120 Tentamen 20111017, kl 14:00 19:00 Hjälpmedel: Observandum: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande), räknetabeller,
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen , kl
 REGLERTEKNIK KTH REGLERTEKNIK AK EL/EL/EL2 Tentamen 2 2 4, kl. 4. 9. Hjälpmedel: Kursboken i glerteknik AK (Glad, Ljung: glerteknik eller motsvarande) räknetabeller, formelsamlingar och räknedosa. Observeraattövningsmaterial
REGLERTEKNIK KTH REGLERTEKNIK AK EL/EL/EL2 Tentamen 2 2 4, kl. 4. 9. Hjälpmedel: Kursboken i glerteknik AK (Glad, Ljung: glerteknik eller motsvarande) räknetabeller, formelsamlingar och räknedosa. Observeraattövningsmaterial
Övningar i Reglerteknik
 Övningar i Reglerteknik Stabilitet hos återkopplade system Ett system är stabilt om utsignalen alltid är begränsad om insignalen är begränsad. Linjära tidsinvarianta system är stabila precis då alla poler
Övningar i Reglerteknik Stabilitet hos återkopplade system Ett system är stabilt om utsignalen alltid är begränsad om insignalen är begränsad. Linjära tidsinvarianta system är stabila precis då alla poler
Reglerteknik AK, Period 2, 2013 Föreläsning 6. Jonas Mårtensson, kursansvarig
 Reglerteknik AK, Period 2, 213 Föreläsning 6 Jonas Mårtensson, kursansvarig Senaste två föreläsningarna Frekvensbeskrivning, Bodediagram Stabilitetsmarginaler Specifikationer (tids-/frekvensplan, slutna/öppna
Reglerteknik AK, Period 2, 213 Föreläsning 6 Jonas Mårtensson, kursansvarig Senaste två föreläsningarna Frekvensbeskrivning, Bodediagram Stabilitetsmarginaler Specifikationer (tids-/frekvensplan, slutna/öppna
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
1RT490 Reglerteknik I 5hp Tentamen: Del B
 RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Torsdag 5 december 206, kl. 3.00-6.00 Plats: Fyrislundsgatan 80, sal Ansvarig lärare: Fredrik Olsson, tel. 08-47 7840. Fredrik kommer och svarar på frågor
RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Torsdag 5 december 206, kl. 3.00-6.00 Plats: Fyrislundsgatan 80, sal Ansvarig lärare: Fredrik Olsson, tel. 08-47 7840. Fredrik kommer och svarar på frågor
Ellära 2, Tema 3. Ville Jalkanen Tillämpad fysik och elektronik, UmU. 1
 Ellära 2, ema 3 Ville Jalkanen illämpad fysik och elektronik, UmU ville.jalkanen@umu.se 1 Innehåll Periodiska signaler Storlek, frekvens,... Filter Överföringsfunktion, belopp och fas, gränsfrekvens ville.jalkanen@umu.se
Ellära 2, ema 3 Ville Jalkanen illämpad fysik och elektronik, UmU ville.jalkanen@umu.se 1 Innehåll Periodiska signaler Storlek, frekvens,... Filter Överföringsfunktion, belopp och fas, gränsfrekvens ville.jalkanen@umu.se
TSIU61: Reglerteknik. Sammanfattning från föreläsning 3 (2/4) ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.
 ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.") TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik. PID-reglering Specifikationer. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
EL1000/1120/1110 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 12: Sammanfattning Kursinfo: Resterande räknestugor 141208, 10-12 Q24 141210, 10-12 L21 141215, 10-12 Q34 141215, 13-15 Q11
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 12: Sammanfattning Kursinfo: Resterande räknestugor 141208, 10-12 Q24 141210, 10-12 L21 141215, 10-12 Q34 141215, 13-15 Q11