Kompletterande anteckningar för Mät- & Reglerteknik 1
|
|
|
- Ann-Christin Johansson
- för 9 år sedan
- Visningar:
Transkript
1 Kompletterande anteckningar för Mät- & Reglerteknik 1 Matias Waller 12 september 2011 Föreliggande anteckningar skall tjäna som ett stöd för undervisningen i Mät- & Reglerteknik 1: Någon ambition att göra materialet fristående och tillräckligt för en full förståelse finns inte. Materialet utvecklas fortlöpande, och alla kommentarer/förslag/synpunkter välkomnas med tacksamhet!

2 Tabell 1: Vanliga termer och beteckningar. Term Förklaring English Beteckning Ärvärde, processens Den reglerade storhetens Actual value, y(t) utsignal, reglerad variabel verkliga (aktuella) värde process value, controlled variable Börvärde, ledvärde, Önskat värde på den Set point, desired r(t) referenssignal storhet man vill reglera value Reglerfel, regleravvikelse Skillnad mellan börvärde och ärvärde Control error e(t) = r(t) y(t) Styrsignal, regulatorns utsignal, styrd variabel Störning(ar) Regulator Signal System Styrdon, ställdon Storhet som används för att påverka processen man vill reglera Storhet som påverkar processen (oönskat) Den enhet som (på basen av mätningar) beräknar styrsignal En storhet som kan variera med tiden (innehåller information) Sambanden mellan två eller flera signaler Don som används för att styra processen Reglerteknik Reglera Återkoppling, slutet system Framkoppling, öppet system PID-regulator Stabilitet Enligt en vanlig definition sägs ett system vara stabilt om begränsade insignaler leder till begränsade utsignaler Fortfarighet, stationärt Då signaler i systemet inte tillstånd, jäm- ändrar, systemet befinner vikt sig i vila Stegsvar Utsignalens förlopp efter att insignalen ändrar som ett steg Dödtid, fördröjningstiändring Tiden det tar efter en för- i insignalen innan något märks i utsignalen Tidskonstant Mått på systemets tröghet, den tid det tar (efter dödtiden) innan stegsvaret nått 63 % av slutvärdet Stigtid Insvängningstid Översväng Stabilitetsmarginal Control signal Disturbance(s) Controller, regulator Signal System Actuator u(t) w(t) (Automatic) Control engineering Control Feedback, closed loop Feed forward (control), open loop PID-Controller Stability Steady state Step response (Transport) delay, dead time Time constant Rise time Settling time Overshoot Stability margin
 Regulator Signal System Styrdon, ställdon Storhet som används för att påverka processen man vill reglera Storhet som påverkar processen")
3 1 Dynamik: Stegsvar och frekvenssvar 1.1 Stegsvar Ett exempel på ett stegsvar (ärvärdets förlopp som funktion av tiden då styrsignalen ändrar som ett steg) ges i Figur 1. Figur 1: Mätningar på ett stegsvar på Armfields PCT23MkII. Från figuren kan man bestämma ungefärligt värde på dödtid (ca 1 sekund), tidskonstant (ca 1 sekund) och förstärkning, K: K = y 100 ml/min = 5 ml/(min%) u 20 % I Figur 2 illustreras olika vanliga stegsvar. 1.2 Frekvenssvar Med frekvenssvar avser man ärvärdets (utsignalens) förlopp som funktion av tiden då styrsignalen (insignalen) är sinusformad. Ett sådant exempel ges i 3
, tidskonstant (ca 1 sekund) och förstärkning, K: K = y 100 ml/min = 5")
4 Figur 2: Exempel på olika sorters stegsvar. Figur 3. Med beteckningar från Fig. 3: Amplitudförhållandet A(ω) ges av förhållandet mellan utsignalens amplitud B(ω) och insignalens amplitud D(ω): A(ω) = B(ω) D(ω) Amplitudförhållandet anges ofta i db: A(ω) db = 20 log 10 (A(ω)) Om utsignalens amplitud är 10 gånger så stor som insignalens amplitud motsvarar det en förstärkning på 20 db. Om utsignalens amplitud är samma som insignalens motsvarar detta en förstärkning på 0 db. En dämpning på 10, dvs att utsignalens amplitud är en tiondel av insignalens motsvaras då av en förstärkning på -20 db. En bra tumregel för db-skalan är att en 4

5 Figur 3: Frekvenssvar: utsignalens förlopp då insignalen är sinusformad. fördubbling (halvering) motsvaras av 6 db (-6 db) och att multiplikation i absolut förstärkning motsvaras av addition (räkneregler för logaritmer) i db: en absolut förstärkning på 8 motsvaras då av en förstärkning 18 db. Fasförsjutningen anges vanligtvis i grader och ges (med beteckningar från Fig. 3) av: φ = t 1 T 360 där minustecknet kommer av att man säger att fasförkjutningen är negativ om utsignalen släpar efter insignalen. För dynamiska system är amplitudförhållandet och fasförskjutningen en funktion av (vinkel)frekvensen (ω, som ofta anges i rad/s)! Sambandet mellan vanlig frekvens f (i Hz) och vinkelfrekvens ges av ω = 2πf. Amplitudförhållande och fasförsjutning illustreras ofta i en tvådelad figur som kallas Bode-diagram: Ytterligare ett Bode-diagram med vanliga termer illustreras i Fig. 7 5
 av: φ = t 1 T 360 där minustecknet kommer av att man säger att fasförkjutningen är negativ om utsignalen släpar efter insignalen.")
6 Figur 4: Bode-diagram för ett system med en tidskonstant. 6

7 Figur 5: Bode-diagram för ett system med bara en dödtid. 7

8 2 PID-regulatorer PID-regulatorer (uttalas PE-I-DE -regulatorer) beskrivs och implementeras i olika former. Här beskrivs några vanliga former. PID i parallell form: u(t) = K c ( e(t) + 1 T i ) de(t) e(t)dt + T d dt där K c är regulatorns förstärkning, T i integraltiden och T d derivatatiden. I praktiken sker derivering ofta på negativa ärvärdet (varför?): ) u(t) = K (e(t) + 1Ti dy(t) e(t)dt T d dt Istället för integraltid och derivatatid stöter man också på integralförstärkning I, och derivataförstärkning D enligt: u(t) = K c e(t) + I e(t)dt + D de(t) dt Sambanden I = Kc T i och D = K c T d gäller. I böcker är PID i parallell form den vanligare, medan många tillverkare implementerar serieformen: e 1 (t) = e(t) + T d de(t) ( dt u(t) = K c e 1 (t) + 1 T i ) e 1 (t)dt Derivering av negativa ärvärdet är också vanligt i detta fall: e 1 (t) = e(t) T d dy(t) ( dt u(t) = K c e 1 (t) + 1 T i ) e 1 (t)dt Man kan notera att PI-regulatorn är samma för parallell och serieformen men skiljer sig åt för PID-reglering. 8
: ) u(t) = K (e(t) + 1Ti dy(t) e(t)dt T d dt Istället för integraltid och derivatatid stöter man också på integralförstärkning I, och derivataförstärkning D enligt: u(t) = K c e(t) + I e(t)dt + D")
9 2.1 Tumregelmetoder för att ställa in PI/PID-regulatorer 1. Minnesregel: Kallas stabilitetsmarginalmetoden i Hägglund (1990) och är kanske den enklaste metoden (kräver inte några mätinstrument men utgår från en mycket grov modell av processen): (a) Lägg regulatorn i automatisk reglering med I- och D-delarna bortkopplade (b) Vrid upp förstärkningen K till regleringen blir orolig. Vrid därefter ner förstärkningen till hälften. (c) Om integralverkan önskas vrid ner integraltiden T i tills regleringen blir orolig. Vrid därefter upp integraltiden till det dubbla värdet. (d) Om derivataverkan önskas vrid upp derivatatiden T d tills regleringen blir orolig. Vrid därefter ner derivatatiden till hälften. 2. Ziegler-Nichols svängningsmetod: En välkänd metod som kritiseras för att vara för aggressiv. Metoden går ut på följande: (a) Lägg regulatorn i automatisk reglering med I- och D-delarna bortkopplade (b) Vrid upp förstärkningen K i P-regulatorn tills systemet nätt och jämnt börjar självsvänga. Notera värdet på förstärkningen som ger självsvängning, K max, och periodtiden för svängningarna, T 0. (c) Ställ in parametrarna i PID-regulatorn enligt Tabell 2. Tabell 2: Ziegler-Nichols tumregler för inställning av PI/PID-regulatorer enligt frekvensmetoden. K max är den förstärkning i P-regulatorn som ger stående svängningar, T 0 är perioden för de stående svängningarna. Regulator K T i T d P 0.5K max PI 0.45K max 0.85T 0 PID parallell 0.6K max 0.5T T 0 PID serie 0.3K max 0.25T T 0 3. Utgående från stegsvar: I Forsman (2005) behandlas inställning av PID-regulatorer på basen av stegsvar mera ingående. Rutinera kring 9
 Om integralverkan önskas vrid ner integraltiden T i tills regleringen blir orolig. Vrid därefter upp integraltiden till det dubbla värdet.")
10 experimenten och analys av stegsvar beskrivs också mera ingående och endast en kort översikt ges i dessa anteckningar. Forsman (2005) tar även avstånd från de två andra tumregelmetoderna som presenterats i dessa anteckningar, speciellt Ziegler-Nichols svängningsmetod som bedöms som olämplig för processindustrin och onödigt aggressiv. Ett stegsvar för en s.k. KLT -process, dvs en process vars stegsvar planar ut och kan beskrivas med de tre parametrarna K (processförstärkning), L (dödtid) och T (tidskonstant), ges i Fig. 1. De tre parametrarna kan skattas från stegsvaret enligt följande: Processförstärkningen: K = y 100 ml/min = 5 ml/(min%) u 20 % De flesta reglersystem skalar dock om mätvärdet före beräkning av styrsignal och man bör då också skala om processförstärkningen (det är då nödvändigt att känna till hela mätområdet). För denna process gäller y max = 500 ml/min och y min = 0 ml/min och då fås processförstärkningen i skalade enheter: K = 100 y/(y max y min ) ml/min/(500 ml/min) = u/(u max u min ) %/(100 %) En väldesignad process har ofta en (skalad) processförstärkning som är 1. Dödtiden L, den tid det det tar efter steget i u innan y börjar svara på ändringen. För denna process gäller ungefär att L 1 s. Tidskonstanten T är den tid det tar för y att genomföra 63 % av sin totala ändring, efter att y börjat ändra. För processen gäller ungefär att T 1 s. Det kan noteras att T vanligen är svårast att skatta, och olika altenativa metoder kan användas för att få gränser för värdet på T. T.ex. kan man utnyttja att totala förändringen (efter att dödtiden förlupit) skett efter ca 4T. L och T kan också skattas med tangentmetoden som presenteras i samband med Chien, Hrones och Reswicks stegsvarsmetod i Thomas (2008). Givet skattningar på K, T och L kan en PI-regulator ställas in så att regulatorns förstärkning ges av K c = 10 T K(L + λ)
, L (dödtid) och T (tidskonstant), ges i Fig. 1.")
11 och integraltiden T i = T Om processen saknar dödtid är λ den tidskonstant man vill ge det slutna systemet, dvs tidskonstanten för ärvärdet vid ett steg på börvärdet. Med dödtid i processen brukar man definiera λ = κt där κ < 1 ger aggressiv reglering och κ > 1 defensiv. I processindustrin rekommenderas κ = 1.5 som default-värde. För integrerande processer och stegsvarmetoden hänvisas till (Forsman, 2005). 2.2 Autotuning Autotuning utnyttjar idén om de enkla tumreglerna för att på basen av enkla experiment erhålla den information (löst uttryckt förstärkning och dynamik) som behövs för att automatiskt ställa in en regulator. Principen för en vanlig typ av autotuning, relämetoden, illustreras i Fig. 6, från Hägglund (2008). Denna går ut på att när autotuningen startar Figur 6: Principen för autotuning, förklaras i större detalj under föreläsningar. 11
. 2.")
12 kopplas PID-regulatorn tillfälligt bort och ersätts med tvålägesreglering : Styrsignalen hoppar mellan två nivåer. Reglerfelet (skillnaden mellan börvärde och ärvärde) avgör vilken nivå styrsignalen skall ha. Ärvärdet kommer då att svänga runt börvärdet. Frekvensen på svängningen är ungefär samma frekvens som man får med Ziegler-Nichols svängningsmetod och förhållandet mellan ärvärdets amplitud och styrsignalens är ungefär samma som processens amplitudförhållande vid denna frekvens. När man använder autotuning är det ofta viktigt att justera amplituden på styrsignalen (mellan vilka nivåer skall styrsignalen hoppa) så att experimentet ger användbar information. 2.3 Ett enkelt stabilitetskriterium Hur kan man avgöra om ett reglersystem är stabilt? Från exemplena har noterats att återkopplingen bör vara negativ för att systemet skall vara stabilt. Detta betyder att då man multiplicerar alla förstärkningarna i alla element i den återkopplade slingan med varandra bör produkten bli negativ. Som exemplet med återkopplingen av den rena transportfördröjningen visade är det dock inte tillräckligt att återkopplingen är negativ, utan i det exemplet gällde att produkten av alla förstärkningar i måste vara mellan 0 och 1 för att systemet skulle vara stabilt. Mera allmänt kan man resonera kring stabilitet genom att undersöka vad som händer med en sinussignal (med en viss frekvens) rör sig genom den återkopplade slingan. Om signalen för varje varv den går genom slingan dämpas (dvs totala förstärkningen är mindre än 1) så kommer signalen att så småningom försvinna. Men om den för varje varv får en större amplitud blir svängningarna allt större och systemet är instabilt. Den frekvens som är kritisk i detta fall är när signalen kommer i fas med sig själv, dvs den frekvens när den totala fasförskjutningen är 360. I ett Bode-diagram för ett återkopplat system är den kritiska frekvensen den frekvens då totala fasförsjutningen är 180. Orsaken att det är 180 och inte 360 är att man inte tar med fasförskjutningen pga den negativa återkopplingen (som spegelvänder signalen, dvs fasförskjuter signalen med 180 ). I Fig. 7 illustreras ett Bode-diagram (med ampltudförhållandet i absolut skala) med flera vanliga termer. Stabilitetskriteriet enligt ovan brukar också kallas för Bodes stabilitetkriterium: Ett återkopplat system är stabilt om totala förstärkningen i den återkopplade slingan är mellan 0 och 1 vid den kritiska frekvensen, dvs den frekvens då den sammalagda fasförskjutningen i de element som ingår i kretsen exklusive teckenvändaren är 180. Relaterat till ett Bode-diagram är det den kritiska frekvensen och amplitudmarginalen för det återkopplade systemet man bestämmer när man ut- 12

13 Figur 7: Bode diagram med nyttiga termer, från Hägglund (1990). nyttjar Ziegler-Nichols frekvensmetod för att ställa in regulatorer. 2.4 Parameterstyrning Parameterstyrning kan utnyttjas för PID-reglering av en process där man vill utnyttja olika inställningar på regulatorn beroende på värdet på en parameter. Denna parameter är oftast ärvärdet eller styrsignalen. Parameterstyrning i kombination med autotuning illustreras i Fig. 8, från användarbeskrivningen till ECA40, en PID-regulator från Alfa Laval Automation som används i högskolans automationslaborium. Man kan notera att styrsignalen benämns utsignal i användarbeskrivningen för ECA40 detta är vanligt i manualer för regulatorer. 13

14 Figur 8: Exempel på hur parameterstyrning kan användas. 14

15 3 Reglerkopplingar Reglerkopplingar eller reglerstrategier är ett gemensamt namn för några strategier som används för att få mera ändamålsenlig reglering vid speciella men rätt allmänna reglertekniska utmaningar. Här sammafattas några av dessa. 3.1 Övertagande reglering Vid övertagande reglering finns det två reglersystem där det ena, det övertagande reglersystemet, tar över under icke-normala förhållanden. Till exempel kan ett reglersystem ha som primär uppgift att hålla ett konstant flöde med tanke på processerna nedströms i produktionen trots att tillgången varierar. Man kan då utnyttja en bufferttank för att möjliggöra ett konstant flöde efter tanken. För att förhindra att tanken rinner över (eller rinner tom) kan man ha ett övertagande reglersystem som ökar flödet om nivån blir för hög (eller stryper flödet om nivån blir för låg). Övertagande reglering kan ofta implementeras med sk väljare. Ett exempel på hur väljare kan utnyttjas i andra sammanhang illustreras i samband med kvotreglering. 3.2 Kaskadreglering Kaskadreglering illustreras bra i Thomas (2008), och visas i Fig. 9. När man ställer in de två regulatorerna, den primära (yttre) regulatorn kallas Regulator 1 och den sekundära (inre) regulatorn kallas Regulator 2 i Fig. 9, är det av avgörande betydelse att göra detta i rätt ordning: 1. Lägg den yttre regulatorn (primärregulatorn) i manuell reglering, 2. Ställ in den inre regulatorn (sekundärregulatorn), 3. Lägg den inre regulatorn i automatisk reglering, 4. Ställ därefter in den yttre regulatorn. Ofta är det tillräckligt att den inre regulatorn är av enklare typ, t.ex., kan en P-regulator utnyttjas som inre regulator, och man kan låta den yttre regulatorn eliminera eventuella bestående fel. Om man vill ha en mjuk inkoppling av en kaskadreglering då denna tas i drift, dvs utgående från att bägge regulatorerna är inställda men i manuell reglering, kan man använda följande metodik: 1. Sätt börvärdet för den inre regulatorn lika med dess ärvärde, 15

16 Figur 9: Exempel på kaskadreglering. 16
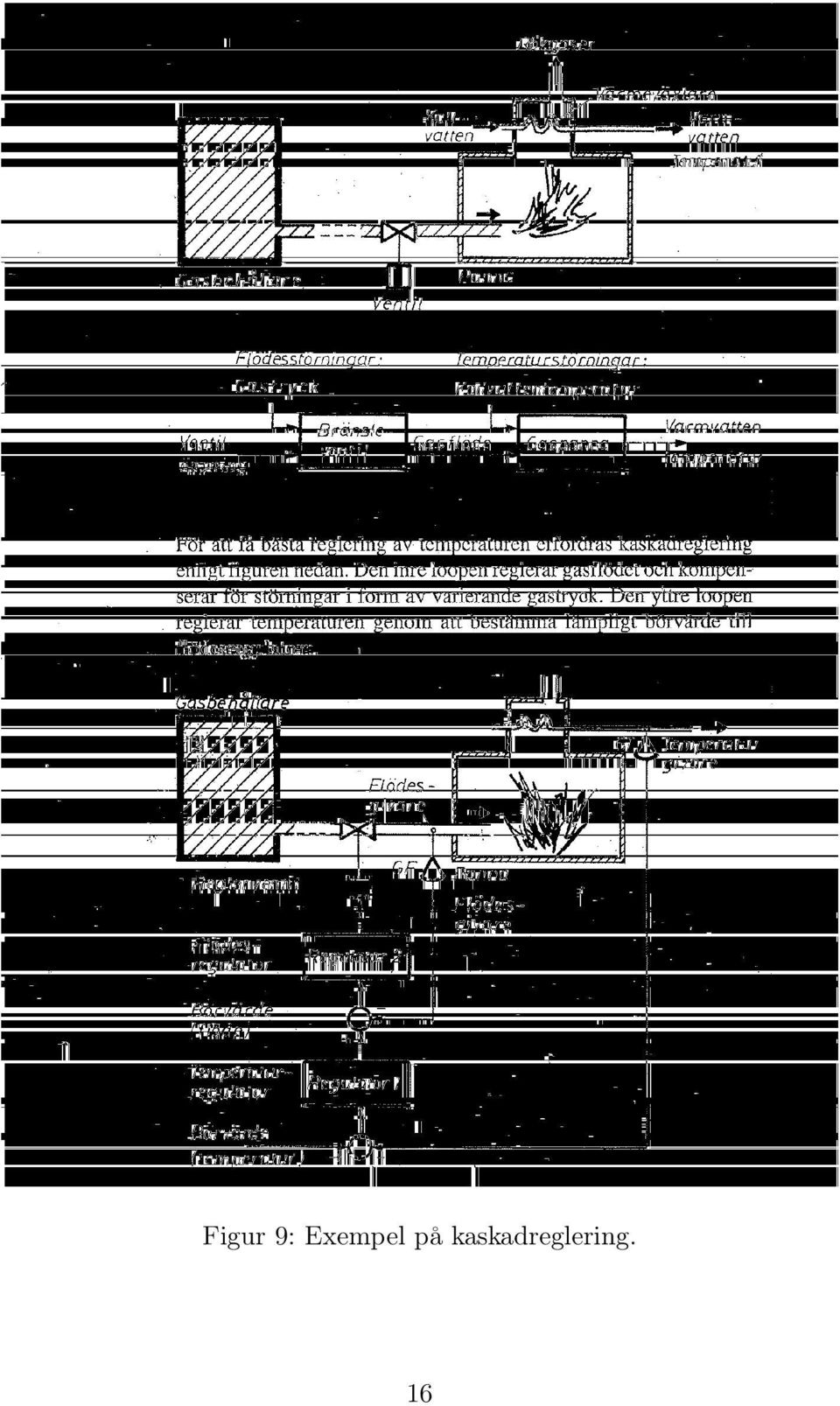
17 2. Lägg den inre regulatorn i automatisk reglering med internt börvärde valt, 3. Justera styrsignalen (manuellt) från den yttre regulatorn så att denna sammanfaller med börvärdet för den inre regulatorn, 4. Byt från internt till externt börvärde för den inre regulatorn, 5. Sätt börvärdet för den yttre regulatorn lika med dess ärvärde, 6. Lägg den yttre regulatorn i automatisk reglering 7. Justera det yttre börvärdet till önskad nivå. 3.3 Kvotreglering Kvotreglering används ofta när man vill reglera två storheter (ärvärden) så att dessa följer ett givet förhållande. Man har då bara ett externt börvärde och en önskad kvot samt två styrsignaler. Principen illustreras i Fig. 10 och är från Hägglund (2008). Figuren innehåller dessutom två väljare. Vilken funktion har dessa väljare i detta sammanhang? 3.4 Framkoppling Framkoppling innebär att man mäter en störning och använder denna information för att bestämma sin styrsignal. Ett vanligt exempel på denna reglerstrategi är att försöka styra rumstemperaturen y med hjälp av en formel eller tabell som anger vilken effekt som ska tillföras värmeelementet, u, i förhållande till aktuell utomhustemperatur, w, och önskad inomhustemperatur, r. I det enklaste fallet är detta statiskt: u = ar bw där a och b är parametrar som bör beskriva rummets egenskaper. Vanligare är dock att framkoppling använder ett filter för att bestämma hur störningen överförs till styrsignalen. Framkoppling kan fungera bra förutsatt att modellen för hur störningen påverkar systemet är god och förhållandena inte varierar särskilt mycket. Om förhållandena ändras, t.ex., en annan störning inträffar som att många fler personer är i rummet, kommer tillskottet från deras kroppsvärme att höja temperaturen. Eftersom styrsystemet inte vet vad innetemperaturen är kan det inte kompensera för detta. Framkoppling är känslig både för fel i 17
 så att dessa följer ett givet förhållande.")
18 Figur 10: Exempel på kvotreglering. FT avser flödesgivare och FIC avser flödesregulator. modellen och för störningar som inte mäts eller är okända. För att komma tillrätta med detta kombinerar de flesta moderna styrsystem framkoppling med någon form av återkoppling. 3.5 Kombinationer Exempel: Utgå från en kvotreglering där man reglerar lufttillförseln i proportion till mängden bränngas för en förbränningsugn. Mängden bränngas bestäms utanför reglersystemet. Denna reglering har dock vissa brister och man vill förbättra den enligt: Trycket i bränngasledningen varierar betydligt varför gasströmmen varierar trots ett givet läge på ventilen. Man vill införa någon reglering som eliminerar dessa variationer. Målet med förbränningen är att hålla ugnens temperatur konstant. Belastningen på ugnen varierar varför det inte räcker att ha en konstant 18

19 reglering av gasströmmen enligt förra punkten. Man vill att regleringen automatiskt beaktar en varierande belastning på ugnen. Ett konstant förhållande mellan bränngas och luft är inte tillräcklig eftersom gasens sammansättning varierar. För att undvika ofullständig förbränning tänker man mäta syrgashalten på rökgaserna. Man vill utnyttja denna information för att automatiskt bestämma ett lämpligt värde på kvoten mellan luft och gas. Skissera det förbättrade reglersystemet! 4 Multivariabla system En multivariabel process kännetecknas av att den har flera styrsignaler och flera ärvärden. Ett enkelt exempel är en vanlig dusch där man genom att vrida på två olika ventiler (två styrsignaler) reglerar både flöde och temperatur. Grovt taget kan man tänka sig två olika strategier för att reglera en multivariabel process: 1. Enkelvariabla regulatorer, dvs man väljer en vanlig regulator (t.ex., en PID-regulator) och kopplar ihop en styrsignal med ett ärvärde. Med denna strategi blir övriga styrsignaler störningar för denna enkelvariabla regulator: vänstra handen inte vet vad högra handen gör (jämför exemplet med duschen). Med denna strategi blir regleringen lika enkel som tidigare, men detta sker ofta på bekostnad av prestanda. 2. En multivariabel regulator. Detta är en regulator som bestämmer samtliga styrsignaler utgående från alla är- och börvärden (all tillgänglig information). Fördelarna med denna strategi är uppenbara ( vänstra handen vet vad högra handen gör ), men nackdelen är att en multivariabel regulator är mera komplicerad och i regel måste implementeras digitalt. Ofta krävs också en bättre modell av processen, t.ex. att modellen även beskriver kopplingarna mellan olika styr- och ärvärden för att reglering skall vara framgångsrik. 5 Digital reglering I moderna reglersystem implementeras regulatorer nästan alltid digitalt. Detta innebär att regulatorn arbetar i diskret tid medan processen man reglerar nästan alltid kan beskrivas i kontinuerlig tid. 19

20 Som exempel kan en PID-regulator nämnas: I kontinuerlig tid (det vanliga fallet) ges PID-regulatorn av ) u(t) = K (e(t) + 1TI de e(t)dt + T D dt Givet en samplingsperiod T s (T s = 1/f s där f s är samplingsfrekvensen) kan en kontinuerlig modell diskretiseras på olika sätt. En enkel möjlighet för en PID-regulator är att approximera integralen med en summa, t=kts 0 e(t)dt T s k e(i) där i och k avser samplingsögonblick och är heltal (index i en minnesvektor i ett program). I praktiken kan man inte implementera denna summa då det skulle kräva att ett växande antal värden av e(i) lagras och summeras för varje sampling. Man inför därför en hjälpvariabel i=1 k 1 w(k 1) = e(i) vilket betyder att man istället kan beräkna summan med: i=1 k e(i) = w(k) = e(k) + w(k 1) i=1 På motsvarande sätt som för integralen kan derivatan (vid tiden t = kt s ) approximeras med en differens de dt e(k) e(k 1) T s Denna diskreta PID-regulator kan därmed skrivas w(k) = w(k 1) + e(k) ( u(k) = K e(k) + T s w(k) + T ) D (e(k) e(k 1)) T I T s Det finns två vanliga sätt att hantera att processen i princip är tidskontinuerlig och regulatorn tidsdiskret: 20
. I praktiken kan man inte implementera denna summa då det skulle kräva att ett växande antal värden av e(i) lagras och summeras för varje sampling.")
21 1. Diskretisera en kontinuerlig regulator Man designar regulatorn med kontinuerliga metoder, dvs som om regulatorn skulle implementeras kontinuerligt. När regulatorn sedan implementeras diskretiserar man regulatorn, dvs översätter från kontinuerlig till diskret tid. Detta innebär en approximation som i regel försämrar reglerprestandan något. Med höga samplingsfrekvenser är detta dock sällan ett problem. Exemplet med PID-regulatorn från förra stycket illustrerar denna princip. 2. Utnyttja en tidsdiskret modell av processen Man designar regulatorn direkt i diskret tid utgående från en beskrivning av processen som är i diskret tid. Då sker all design i tidsdiskret tid. Detta har fördelen att effekten av sampling (tidsdiskretisering) direkt beaktas och vidare öppnas nya möjligheter för design av reglersystem. Som exempel kan nämnas modellprediktiv reglering som är ett område som utvecklats aktivt. I grova drag kan man säga att modellprektiv reglering går ut på använda sin modell av processen för att bestämma den sekvens av styrsignaler som leder till önskat ärvärde (en form av framkoppling). I praktiken blir ärvärdet inte helt som önskat och då bestäms en ny sekvens av styrsignaler för att igen nå önskat resultat (en form av återkoppling). Detta kan ses som ett exempel på en typ av arbetsmetodik som möjliggörs i en digital miljö. En tidsdiskret modell av processen kan bestämmas antingen genom att (försöka) diskretisera en kontinuerlig modell eller genom anpassning av en modell utgående från samplade mätningar. En kontinuerlig modell för processen bestäms oftast utgående från principerna för fysikalisk modellering (nästa kurs). När en modell bestäms på basen av mätningar kallas det för identifiering. Referenser Forsman, K. (2005). Reglerteknik för processindustrin. Studentlitteratur. Lund. Hägglund, T. (1990). Praktisk processreglering. Studentlitteratur. Lund. Hägglund, T. (2008). Praktisk processreglering. Studentlitteratur. Lund. Thomas, B. (2008). Modern Reglerteknik. Liber. Ljubljana. 21
REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN
 AV REGLERTEKNIKEN") REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN Automatisk styra processer. Generell metodik Bengt Carlsson Huvudantagande: Processen kan påverkas med en styrsignal (insignal). Normalt behöver man kunna mäta
REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN Automatisk styra processer. Generell metodik Bengt Carlsson Huvudantagande: Processen kan påverkas med en styrsignal (insignal). Normalt behöver man kunna mäta
Mät- & reglerteknik 1: Kompletterande material
 Mät- & reglerteknik 1: Kompletterande material Matias Waller 22 augusti 2013 Dessa anteckningar är avsedda för att komplettera kurslitteraturen och undervisningen i reglerteknik. Anteckningarna är knappast
Mät- & reglerteknik 1: Kompletterande material Matias Waller 22 augusti 2013 Dessa anteckningar är avsedda för att komplettera kurslitteraturen och undervisningen i reglerteknik. Anteckningarna är knappast
Mät- & reglerteknik 1: Kompletterande material
 Mät- & reglerteknik 1: Kompletterande material Matias Waller 25 augusti 2015 Dessa anteckningar är avsedda för att komplettera kurslitteraturen och undervisningen i reglerteknik. Anteckningarna är knappast
Mät- & reglerteknik 1: Kompletterande material Matias Waller 25 augusti 2015 Dessa anteckningar är avsedda för att komplettera kurslitteraturen och undervisningen i reglerteknik. Anteckningarna är knappast
Överföringsfunktioner, blockscheman och analys av reglersystem
 Övning 3 i Mät- & Reglerteknik 2 (M112602, 3sp), MT-3, 2013. Överföringsfunktioner, blockscheman och analys av reglersystem Som ett led i att utveckla en autopilot för ett flygplan har man bestämt följande
Övning 3 i Mät- & Reglerteknik 2 (M112602, 3sp), MT-3, 2013. Överföringsfunktioner, blockscheman och analys av reglersystem Som ett led i att utveckla en autopilot för ett flygplan har man bestämt följande
2. Reglertekniska grunder
 2.1 Signaler och system 2.1 Signaler och system Ett system växelverkar med sin omgivning via insignaler, som påverkar systemets beteende utsignaler, som beskriver dess beteende Beroende på sammanhanget
2.1 Signaler och system 2.1 Signaler och system Ett system växelverkar med sin omgivning via insignaler, som påverkar systemets beteende utsignaler, som beskriver dess beteende Beroende på sammanhanget
Reglerteknik 1. Kapitel 1, 2, 3, 4. Köp bok och övningshäfte på kårbokhandeln. William Sandqvist william@kth.se
 Reglerteknik 1 Kapitel 1, 2, 3, 4 Köp bok och övningshäfte på kårbokhandeln Reglerteknik 1. Givare för yttertemperatur 2, 3. Givare för inomhustemperaturer Behaglig innetemperatur med hjälp av reglerteknik!
Reglerteknik 1 Kapitel 1, 2, 3, 4 Köp bok och övningshäfte på kårbokhandeln Reglerteknik 1. Givare för yttertemperatur 2, 3. Givare för inomhustemperaturer Behaglig innetemperatur med hjälp av reglerteknik!
Tentamen i Styr- och Reglerteknik, för U3 och EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 2 december kl. 9-13, 29 Sal: R1122 Tillåtna hjälpmedel:
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 2 december kl. 9-13, 29 Sal: R1122 Tillåtna hjälpmedel:
TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT62
 TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT62 Tid: Tisdagen den 2 juni 27, kl 4.-8. Lokal: TER Ansvariga lärare: Inger Klein, 28 665 eller 73-9699, Calin Curescu, 28 937 eller 73-54355 Hjälpmedel:
TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT62 Tid: Tisdagen den 2 juni 27, kl 4.-8. Lokal: TER Ansvariga lärare: Inger Klein, 28 665 eller 73-9699, Calin Curescu, 28 937 eller 73-54355 Hjälpmedel:
MODELLERING AV DYNAMISKA SYSTEM OCH INLUPP 2
 UPPSALA UNIVERSITET AVDELNINGEN FÖR SYSTEMTEKNIK EKL och PSA, 2002, rev BC 2009, 2013 MODELLERING AV DYNAMISKA SYSTEM DATORSTÖDD RÄKNEÖVNING OCH INLUPP 2 1. Överföringsfunktioner 2. Tillståndsmetodik Förberedelseuppgifter:
UPPSALA UNIVERSITET AVDELNINGEN FÖR SYSTEMTEKNIK EKL och PSA, 2002, rev BC 2009, 2013 MODELLERING AV DYNAMISKA SYSTEM DATORSTÖDD RÄKNEÖVNING OCH INLUPP 2 1. Överföringsfunktioner 2. Tillståndsmetodik Förberedelseuppgifter:
REGLERTEKNIK Laboration 5
 6 SAMPLADE SYSTEM 6. Sampling av signaler När man använder en dator som regulator, kan man endast behandla signaler i diskreta tidpunkter. T.ex. mäts systemets utsignal i tidpunkter med visst mellanrum,
6 SAMPLADE SYSTEM 6. Sampling av signaler När man använder en dator som regulator, kan man endast behandla signaler i diskreta tidpunkter. T.ex. mäts systemets utsignal i tidpunkter med visst mellanrum,
1. Inledning. 1. Inledning
 För de flesta människor är ett relativt okänt begrepp trots att var och en i det dagliga livet ständigt kommer i kontakt med och t.o.m. själv utövar. Reglerteknik är varje rationell metod att styra eller
För de flesta människor är ett relativt okänt begrepp trots att var och en i det dagliga livet ständigt kommer i kontakt med och t.o.m. själv utövar. Reglerteknik är varje rationell metod att styra eller
2. Reglertekniska grunder
 2. Reglertekniska grunder 2.1 Signaler oc system Ett system växelverkar med sin omgivning via insignaler, som åverkar systemets beteende, oc utsignaler, som beskriver dess beteende. Beroende å sammananget
2. Reglertekniska grunder 2.1 Signaler oc system Ett system växelverkar med sin omgivning via insignaler, som åverkar systemets beteende, oc utsignaler, som beskriver dess beteende. Beroende å sammananget
Reglerteknik 6. Kapitel 10. Köp bok och övningshäfte på kårbokhandeln. William Sandqvist william@kth.se
 Reglerteknik 6 Kapitel Köp bok och övningshäfte på kårbokhandeln Föreläsning 6 kap Reglersystemets egenskaper Stabilitet är den viktigaste egenskapen. Ett ostabilt system är oanvändbart. Stabilitet är
Reglerteknik 6 Kapitel Köp bok och övningshäfte på kårbokhandeln Föreläsning 6 kap Reglersystemets egenskaper Stabilitet är den viktigaste egenskapen. Ett ostabilt system är oanvändbart. Stabilitet är
Reglerteknik M3, 5p. Tentamen 2008-08-27
 Reglerteknik M3, 5p Tentamen 2008-08-27 Tid: 08:30 12:30 Lokal: M-huset Kurskod: ERE031/ERE032/ERE033 Lärare: Knut Åkesson, tel 0701-749525 Läraren besöker tentamenssalen vid två tillfällen för att svara
Reglerteknik M3, 5p Tentamen 2008-08-27 Tid: 08:30 12:30 Lokal: M-huset Kurskod: ERE031/ERE032/ERE033 Lärare: Knut Åkesson, tel 0701-749525 Läraren besöker tentamenssalen vid två tillfällen för att svara
Reglerteknik Z2. Kurskod: SSY 050 och ERE080. Tentamen 2006-08-24
 Reglerteknik Z2 Kurskod: SSY 050 och ERE080 Tentamen 2006-08-24 Tid: 14:00-18:00, Lokal: V-huset Lärare: Goran Cengic tel 3729, 073-903 70 10 Tentamen omfattar 25 poäng, där betyg tre fordrar 10 poäng,
Reglerteknik Z2 Kurskod: SSY 050 och ERE080 Tentamen 2006-08-24 Tid: 14:00-18:00, Lokal: V-huset Lärare: Goran Cengic tel 3729, 073-903 70 10 Tentamen omfattar 25 poäng, där betyg tre fordrar 10 poäng,
Lösningar till tentamen i Industriell reglerteknik TSRT07 Tentamensdatum: Martin Enqvist
 ösningar till tentamen i Industriell reglerteknik TSRT7 Tentamensdatum: 28-3-2 Martin Enqvist a) Z-transformering av sambanden som beskriver den tidsdiskreta regulatorn ger Iz) = KT Sz T i z ) Ez) = Kz
ösningar till tentamen i Industriell reglerteknik TSRT7 Tentamensdatum: 28-3-2 Martin Enqvist a) Z-transformering av sambanden som beskriver den tidsdiskreta regulatorn ger Iz) = KT Sz T i z ) Ez) = Kz
Lösningar till tentamen i styr- och reglerteknik (Med fet stil!)
") Lösningar till tentamen i styr- och reglerteknik (Med fet stil!) Uppgift 1 (4p) Figuren nedan visar ett reglersystem för nivån i en tank.utflödet från tanken styrs av en pump och har storleken V (m 3 /s).
Lösningar till tentamen i styr- och reglerteknik (Med fet stil!) Uppgift 1 (4p) Figuren nedan visar ett reglersystem för nivån i en tank.utflödet från tanken styrs av en pump och har storleken V (m 3 /s).
Reglerteknik M3. Inlämningsuppgift 3. Lp II, 2006. Namn:... Personnr:... Namn:... Personnr:...
 Reglerteknik M3 Inlämningsuppgift 3 Lp II, 006 Namn:... Personnr:... Namn:... Personnr:... Uppskattad tid, per person, för att lösa inlämningsuppgiften:... Godkänd Datum:... Signatur:... Påskriften av
Reglerteknik M3 Inlämningsuppgift 3 Lp II, 006 Namn:... Personnr:... Namn:... Personnr:... Uppskattad tid, per person, för att lösa inlämningsuppgiften:... Godkänd Datum:... Signatur:... Påskriften av
LABORATIONSINSTRUKTION DIGITAL REGLERTEKNIK. Lab nr. 3 DIGITAL PI-REGLERING AV FÖRSTA ORDNINGENS PROCESS
 LABORATIONSINSTRUKTION DIGITAL REGLERTEKNIK Lab nr. 3 DIGITAL PI-REGLERING AV FÖRSTA ORDNINGENS PROCESS Obs! Alla förberedande uppgifter skall vara gjorda innan laborationstillfället! Namn: Program: Laborationen
LABORATIONSINSTRUKTION DIGITAL REGLERTEKNIK Lab nr. 3 DIGITAL PI-REGLERING AV FÖRSTA ORDNINGENS PROCESS Obs! Alla förberedande uppgifter skall vara gjorda innan laborationstillfället! Namn: Program: Laborationen
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
Tentamen i Systemteknik/Processreglering
 Institutionen för REGLERTEKNIK Tentamen i Systemteknik/Processreglering 22 augusti 2011 kl 14 19 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen
Institutionen för REGLERTEKNIK Tentamen i Systemteknik/Processreglering 22 augusti 2011 kl 14 19 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen
Utbildning i reglerteknik. Ett samarbete inom ProcessIT mellan LTU och Optimation
 Utbildning i reglerteknik Ett samarbete inom ProcessIT mellan LTU och Optimation Upplägg Grov planering Seminarium Riktat mot en bredare publik än bara kursdeltagarna. Syftar till att skapa en förståelse
Utbildning i reglerteknik Ett samarbete inom ProcessIT mellan LTU och Optimation Upplägg Grov planering Seminarium Riktat mot en bredare publik än bara kursdeltagarna. Syftar till att skapa en förståelse
TSRT91 Reglerteknik: Föreläsning 2
 Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Innehåll. Vad är reglerteknik? Forskning inom processtyrning - Resurseffektiv avloppsvattenrening genom reglerteknik
 Forskning inom processtyrning - Resurseffektiv avloppsvattenrening genom reglerteknik Bengt Carlsson Uppsala universitet Innehåll Vad är reglerteknik? (kortversionen!) Överordnad syrereglering ILC ett
Forskning inom processtyrning - Resurseffektiv avloppsvattenrening genom reglerteknik Bengt Carlsson Uppsala universitet Innehåll Vad är reglerteknik? (kortversionen!) Överordnad syrereglering ILC ett
Praktisk ProcessAutomation. Göran Malmberg Kim Nyborg
 Praktisk ProcessAutomation Göran Malmberg Kim Nyborg Kopieringsförbud! Kopiering av denna publikation är förbjuden enligt svensk lag. Skogsindustrins Utbildning i Markaryd AB Redaktör: Pär-Ola Folcker
Praktisk ProcessAutomation Göran Malmberg Kim Nyborg Kopieringsförbud! Kopiering av denna publikation är förbjuden enligt svensk lag. Skogsindustrins Utbildning i Markaryd AB Redaktör: Pär-Ola Folcker
Föreläsning 8, Introduktion till tidsdiskret reglering, Z-transfomer, Överföringsfunktioner
 Föreläsning 8, Introduktion till tidsdiskret reglering, Z-transfomer, Överföringsfunktioner Reglerteknik, IE1304 1 / 24 Innehåll 1 2 3 4 2 / 24 Innehåll 1 2 3 4 3 / 24 Vad är tidsdiskret reglering? Regulatorn
Föreläsning 8, Introduktion till tidsdiskret reglering, Z-transfomer, Överföringsfunktioner Reglerteknik, IE1304 1 / 24 Innehåll 1 2 3 4 2 / 24 Innehåll 1 2 3 4 3 / 24 Vad är tidsdiskret reglering? Regulatorn
Industriell reglerteknik: Föreläsning 6
 Föreläsningar 1 / 15 Industriell reglerteknik: Föreläsning 6 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Föreläsningar 1 / 15 Industriell reglerteknik: Föreläsning 6 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Datorövning Matlab/Simulink. Styr- och Reglerteknik för U3/EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 0803/ Thomas Munther Datorövning Matlab/Simulink i Styr- och Reglerteknik för U3/EI Laborationen förutsätter en del förberedelser
Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 0803/ Thomas Munther Datorövning Matlab/Simulink i Styr- och Reglerteknik för U3/EI Laborationen förutsätter en del förberedelser
Reglerteknik, TSIU 61
 Reglerteknik, TSIU 61 Föreläsning 8 Störningar, modellfel och svårstyrda system Reglerteknik, ISY, Linköpings Universitet Innehåll 2(15) 1. Sammanfattning av föreläsning 7 2. Känslighet mot störningar
Reglerteknik, TSIU 61 Föreläsning 8 Störningar, modellfel och svårstyrda system Reglerteknik, ISY, Linköpings Universitet Innehåll 2(15) 1. Sammanfattning av föreläsning 7 2. Känslighet mot störningar
Styr- och Reglerteknik för U3/EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071118/ Thomas Munther LABORATION 4 i Styr- och Reglerteknik för U3/EI2 Målsättning: Använda tumregler för att ställa
Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071118/ Thomas Munther LABORATION 4 i Styr- och Reglerteknik för U3/EI2 Målsättning: Använda tumregler för att ställa
Reglerteknik, TSIU 61
 Reglerteknik, TSIU 61 Föreläsning 7 Regulatorkonstruktion i Bodediagram Reglerteknik, ISY, Linköpings Universitet Innehåll 2(18) 1. Sammanfattning av föreläsning 6 2. Hur ställer man in en PID-regulator
Reglerteknik, TSIU 61 Föreläsning 7 Regulatorkonstruktion i Bodediagram Reglerteknik, ISY, Linköpings Universitet Innehåll 2(18) 1. Sammanfattning av föreläsning 6 2. Hur ställer man in en PID-regulator
Systemteknik/Processreglering F2
 Systemteknik/Processreglering F2 Processmodeller Stegsvarsmodeller PID-regulatorn Läsanvisning: Process Control: 1.4, 2.1 2.5 Processmodeller I den här kursen kommer vi att huvudsakligen att jobba med
Systemteknik/Processreglering F2 Processmodeller Stegsvarsmodeller PID-regulatorn Läsanvisning: Process Control: 1.4, 2.1 2.5 Processmodeller I den här kursen kommer vi att huvudsakligen att jobba med
F13: Regulatorstrukturer och implementering
 Föreläsning 2 PID-reglering Förra föreläsningen F3: Regulatorstrukturer och implementering 25 Februari, 209 Lunds Universitet, Inst för Reglerteknik. Bodediagram för PID-regulator 2. Metoder för empirisk
Föreläsning 2 PID-reglering Förra föreläsningen F3: Regulatorstrukturer och implementering 25 Februari, 209 Lunds Universitet, Inst för Reglerteknik. Bodediagram för PID-regulator 2. Metoder för empirisk
En översikt av Kap 7. Tillbakablick, återkoppling Informationsteknologi Reglering av vätskenivån i en tank. Framkoppling. Informationsteknologi
 Bengt Carlsson Avd f... och även i reningsverk En översikt av Kap 7 Tekniken i Kap 7 är vanlig i många industriella tillämpningar (t ex kärnkraftver och för klimatreglering i byggnader llbakablick, återkoppling
Bengt Carlsson Avd f... och även i reningsverk En översikt av Kap 7 Tekniken i Kap 7 är vanlig i många industriella tillämpningar (t ex kärnkraftver och för klimatreglering i byggnader llbakablick, återkoppling
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Kortfattade lösningsförslag till tentamen 2015 04 08, kl. 8.00 13.00
 REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL0 Kortfattade lösningsförslag till tentamen 05 04 08, kl. 8.00 3.00. (a) Signalen u har vinkelfrekvens ω = 0. rad/s, och vi läser av G(i0.) 35 och arg G(i0.)
REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL0 Kortfattade lösningsförslag till tentamen 05 04 08, kl. 8.00 3.00. (a) Signalen u har vinkelfrekvens ω = 0. rad/s, och vi läser av G(i0.) 35 och arg G(i0.)
Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen.
 Reglering Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen. Regulator eller reglerenhet används för att optimera
Reglering Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen. Regulator eller reglerenhet används för att optimera
Tentamen i Reglerteknik, för D2/E2/T2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Lördagen den 15 Augusti kl.9.-13. 29 Sal: Tillåtna hjälpmedel: Valfri
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Lördagen den 15 Augusti kl.9.-13. 29 Sal: Tillåtna hjälpmedel: Valfri
Välkomna till TSRT19 Reglerteknik Föreläsning 3. Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula
 Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Elektro och Informationsteknik LTH Laboration 4 Tidsplan, frekvensplan och impedanser
 Elektro och Informationsteknik LTH Laboration 4 Tidsplan, frekvensplan och impedanser Elektronik för D ETIA01 Andrés Alayon Glasunov Palmi Thor Thorbergsson Anders J Johansson Lund Mars 2009 Laboration
Elektro och Informationsteknik LTH Laboration 4 Tidsplan, frekvensplan och impedanser Elektronik för D ETIA01 Andrés Alayon Glasunov Palmi Thor Thorbergsson Anders J Johansson Lund Mars 2009 Laboration
Välkomna till TSRT19 Reglerteknik M Föreläsning 7. Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet
 Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
Processidentifiering och Polplacerad Reglering
 UmU/TFE Laboration Processidentifiering och Polplacerad Reglering Introduktion Referenser till teoriavsnitt följer här. Processidentifiering: Kursbok kap 17.3-17.4. Jämför med det sista exemplet i kap
UmU/TFE Laboration Processidentifiering och Polplacerad Reglering Introduktion Referenser till teoriavsnitt följer här. Processidentifiering: Kursbok kap 17.3-17.4. Jämför med det sista exemplet i kap
Tentamen i Reglerteknik, 4p för D2/E2/T2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, 4p för D2/E2/T2 Tid: Måndagen den 28 maj kl.9.-13. 27 Sal: R1122 Tillåtna hjälpmedel: Valfri
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, 4p för D2/E2/T2 Tid: Måndagen den 28 maj kl.9.-13. 27 Sal: R1122 Tillåtna hjälpmedel: Valfri
Tillämpningar av fysik och dynamik i biologiska system 2007-11-21, kl. 09:00-15:00
 Umeå universitet Tillämpad fysik och elektronik Staffan Grundberg Bo Tannfors Tentamen i elektronik: Hjälpmedel: Tillämpningar av fysik och dynamik i biologiska system 2007--2, kl. 09:00-5:00 Reglerteknikformelsamling,
Umeå universitet Tillämpad fysik och elektronik Staffan Grundberg Bo Tannfors Tentamen i elektronik: Hjälpmedel: Tillämpningar av fysik och dynamik i biologiska system 2007--2, kl. 09:00-5:00 Reglerteknikformelsamling,
Reglerteknik 7. Kapitel 11. Köp bok och övningshäfte på kårbokhandeln. William Sandqvist
 Reglerteknik 7 Kapitel Köp bok och övningshäfte på kårbokhandeln Föreläsning 7 kap Dimensionering av analoga reglersystem. Tumregelmetoder Bodediagram (Kompenseringsfilter) Simulering MATLAB-programmet
Reglerteknik 7 Kapitel Köp bok och övningshäfte på kårbokhandeln Föreläsning 7 kap Dimensionering av analoga reglersystem. Tumregelmetoder Bodediagram (Kompenseringsfilter) Simulering MATLAB-programmet
Exempel: reglering av en plattreaktor. Varför systemteknik/processreglering? Blockdiagram. Blockdiagram för en (del)process. Exempel: tankprocess
process. Exempel: tankprocess") Systemteknik/reglering Föreläsning Vad är systemteknik oc reglerteknik? Blockdiagram Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling PID-reglering Läsanvisning: Control:..3 Vad
Systemteknik/reglering Föreläsning Vad är systemteknik oc reglerteknik? Blockdiagram Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling PID-reglering Läsanvisning: Control:..3 Vad
TSRT91 Reglerteknik: Föreläsning 5
 TSRT9 Reglerteknik: Föreläsning 5 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar / 23 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT9 Reglerteknik: Föreläsning 5 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar / 23 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
ÅBO AKADEMI REGLERTEKNIK I
 INSTITUTIONEN FÖR KEMITEKNIK Laboratoriet för reglerteknik ÅBO AKADEMI DEPARTMENT OF CHEMICAL ENGINEERING Process Control Laboratory REGLERTEKNIK I Grundkurs Kurt-Erik Häggblom Biskopsgatan 8 FIN-20500
INSTITUTIONEN FÖR KEMITEKNIK Laboratoriet för reglerteknik ÅBO AKADEMI DEPARTMENT OF CHEMICAL ENGINEERING Process Control Laboratory REGLERTEKNIK I Grundkurs Kurt-Erik Häggblom Biskopsgatan 8 FIN-20500
Regulator. G (s) Figur 1: Blockdiagram för ett typiskt reglersystem
 Figur 1: Blockdiagram för ett typiskt reglersystem") Rs) + Σ Es) Regulator G s) R Us) Process G s) P Ys) Figur : Blockdiagram för ett typiskt reglersystem Något om PID-reglering PID-regulatorn består av proportionell del, integrerande del och deriverande
Rs) + Σ Es) Regulator G s) R Us) Process G s) P Ys) Figur : Blockdiagram för ett typiskt reglersystem Något om PID-reglering PID-regulatorn består av proportionell del, integrerande del och deriverande
TSRT91 Reglerteknik: Föreläsning 9
 TSRT91 Reglerteknik: Föreläsning 9 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 20 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT91 Reglerteknik: Föreläsning 9 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 20 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Laplacetransform, poler och nollställen
 Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Välkomna till TSRT19 Reglerteknik Föreläsning 8. Sammanfattning av föreläsning 7 Framkoppling Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
Industriell reglerteknik: Föreläsning 3
 Industriell reglerteknik: Föreläsning 3 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 19 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Industriell reglerteknik: Föreläsning 3 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 19 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Tentamen i reglerteknik SSY310/ERE091. Torsdagen den 4 juni 2015 kl. 14:00
 Chalmers Tekniska Högskola Institutionen för signaler och system Avdelningen för reglerteknik, automation och mekatronik Tentamen i reglerteknik SSY31/ERE91 Torsdagen den 4 juni 215 kl. 14: 1. Längd: 4
Chalmers Tekniska Högskola Institutionen för signaler och system Avdelningen för reglerteknik, automation och mekatronik Tentamen i reglerteknik SSY31/ERE91 Torsdagen den 4 juni 215 kl. 14: 1. Längd: 4
TSIU61: Reglerteknik. Sammanfattning från föreläsning 3 (2/4) ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.
 ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.") TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
Vad är systemteknik och reglerteknik? Föreläsning 1. Systemteknik handlar om dynamiska system
 1 Föreläsning 1 Vad är systemteknik oc reglerteknik? Grundläggande begrepp Grafiska representationer Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling Vad är systemteknik oc reglerteknik?
1 Föreläsning 1 Vad är systemteknik oc reglerteknik? Grundläggande begrepp Grafiska representationer Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling Vad är systemteknik oc reglerteknik?
TSIU61: Reglerteknik. PID-reglering Specifikationer. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik. Matematiska modeller Laplacetransformen. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 2 Matematiska modeller Laplacetransformen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 2 Gustaf Hendeby HT1 2017 1 / 21 Innehåll föreläsning 2 ˆ Sammanfattning
TSIU61: Reglerteknik Föreläsning 2 Matematiska modeller Laplacetransformen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 2 Gustaf Hendeby HT1 2017 1 / 21 Innehåll föreläsning 2 ˆ Sammanfattning
EL1000/1120/1110 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Administration För frågor kring Bilda, labbanmälan, kurshemsida, etc.: kontakta Anneli Ström
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Administration För frågor kring Bilda, labbanmälan, kurshemsida, etc.: kontakta Anneli Ström
Industriella styrsystem, TSIU06. Föreläsning 1
 Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Kursöversikt 2(34) Detta är en laborations- och projektkurs. Praktiken kommer före teorin (kursen Reglerteknik) Tre
Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Kursöversikt 2(34) Detta är en laborations- och projektkurs. Praktiken kommer före teorin (kursen Reglerteknik) Tre
FOURIERANALYS En kort introduktion
 FOURIERAALYS En kort introduktion Kurt Hansson 2009 Innehåll 1 Signalanalys 2 2 Periodiska signaler 2 3 En komplex) skalärprodukt 4 4 Fourierkoefficienter 4 5 Sampling 5 5.1 Shannon s teorem.................................
FOURIERAALYS En kort introduktion Kurt Hansson 2009 Innehåll 1 Signalanalys 2 2 Periodiska signaler 2 3 En komplex) skalärprodukt 4 4 Fourierkoefficienter 4 5 Sampling 5 5.1 Shannon s teorem.................................
Industriella Styrsystem Övningskompendium
 Industriella Styrsystem Övningskompendium 14 mars 2013 REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING Reglerteknik, Institutionen för systemteknik, Linköpings universitet, 581 83 Linköping www.control.isy.liu.se
Industriella Styrsystem Övningskompendium 14 mars 2013 REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING Reglerteknik, Institutionen för systemteknik, Linköpings universitet, 581 83 Linköping www.control.isy.liu.se
Reglerteori, TSRT09. Föreläsning 4: Kalmanfiltret & det slutna systemet. Torkel Glad. Reglerteknik, ISY, Linköpings Universitet
 Reglerteori, TSRT09 Föreläsning 4: Kalmanfiltret & det slutna systemet Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 3 2(19) Kovariansfunktion: Spektrum: R u (τ) = Eu(t)u(t τ)
Reglerteori, TSRT09 Föreläsning 4: Kalmanfiltret & det slutna systemet Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 3 2(19) Kovariansfunktion: Spektrum: R u (τ) = Eu(t)u(t τ)
ÅBO AKADEMI REGLERTEKNIK I
 INSTITUTIONEN FÖR KEMITEKNIK Laboratoriet för reglerteknik ÅBO AKADEMI DEPARTMENT OF CHEMICAL ENGINEERING Process Control Laboratory REGLERTEKNIK I Grundkurs Kurt-Erik Häggblom Biskopsgatan 8 FIN-0500
INSTITUTIONEN FÖR KEMITEKNIK Laboratoriet för reglerteknik ÅBO AKADEMI DEPARTMENT OF CHEMICAL ENGINEERING Process Control Laboratory REGLERTEKNIK I Grundkurs Kurt-Erik Häggblom Biskopsgatan 8 FIN-0500
TSRT09 Reglerteori. Sammanfattning av Föreläsning 3. Sammanfattning av Föreläsning 3, forts. Sammanfattning av Föreläsning 3, forts.
 Reglerteori 2016, Föreläsning 4 Daniel Axehill 1 / 18 Sammanfattning av Föreläsning 3 Kovariansfunktion: TSRT09 Reglerteori Föreläsning 4: Kalmanfiltret & det slutna systemet Daniel Axehill Reglerteknik,
Reglerteori 2016, Föreläsning 4 Daniel Axehill 1 / 18 Sammanfattning av Föreläsning 3 Kovariansfunktion: TSRT09 Reglerteori Föreläsning 4: Kalmanfiltret & det slutna systemet Daniel Axehill Reglerteknik,
Lennart Carleson. KTH och Uppsala universitet
 46 Om +x Lennart Carleson KTH och Uppsala universitet Vi börjar med att försöka uppskatta ovanstående integral, som vi kallar I, numeriskt. Vi delar in intervallet (, ) i n lika delar med delningspunkterna
46 Om +x Lennart Carleson KTH och Uppsala universitet Vi börjar med att försöka uppskatta ovanstående integral, som vi kallar I, numeriskt. Vi delar in intervallet (, ) i n lika delar med delningspunkterna
Industriell reglerteknik: Föreläsning 4
 Föreläsningar / 25 Industriell reglerteknik: Föreläsning 4 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Föreläsningar / 25 Industriell reglerteknik: Föreläsning 4 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Tentamen i Reglerteknik, för D2/E2/T2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Torsdagen den 3 Juni kl.9.-13. 21 Sal: R1122 Tillåtna hjälpmedel: Valfri
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Torsdagen den 3 Juni kl.9.-13. 21 Sal: R1122 Tillåtna hjälpmedel: Valfri
PID-regulatorn. Föreläsning 9. Frekvenstolkning av PID-regulatorn. PID-regulatorns Bodediagram
 PID-regulatorn Frekvenstolkning Inställningsmetoder Manuell inställning Ziegler Nichols metoder Modellbaserad inställning Praktiska modifieringar Standardkretsar Föreläsning 9 Rekommenderad läsning: Process
PID-regulatorn Frekvenstolkning Inställningsmetoder Manuell inställning Ziegler Nichols metoder Modellbaserad inställning Praktiska modifieringar Standardkretsar Föreläsning 9 Rekommenderad läsning: Process
Tentamen i Styr- och Reglerteknik, för U3 och EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 12 Augusti kl. 9-13, 29 Sal: - Tillåtna hjälpmedel:
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 12 Augusti kl. 9-13, 29 Sal: - Tillåtna hjälpmedel:
Styr- och Reglerteknik för U3/EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 08/ Thomas Munther LABORATION i Styr- och Reglerteknik för U/EI Målsättning: Använda tumregler för att ställa in regulatorer
Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 08/ Thomas Munther LABORATION i Styr- och Reglerteknik för U/EI Målsättning: Använda tumregler för att ställa in regulatorer
TSIU61: Reglerteknik. Frekvensbeskrivning Bodediagram. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 5 Gustaf Hendeby HT1 2017 1 / 1 Innehåll föreläsning 5 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 5 Gustaf Hendeby HT1 2017 1 / 1 Innehåll föreläsning 5 ˆ Sammanfattning av föreläsning
G(s) = 5s + 1 s(10s + 1)
 = 5s + 1 s(10s + 1)") Projektuppgift 1: Integratoruppvridning I kursen behandlas ett antal olika typer av olinjäriteter som är mer eller mindre vanligt förekommande i reglersystem. En olinjäritet som dock alltid förekommer
Projektuppgift 1: Integratoruppvridning I kursen behandlas ett antal olika typer av olinjäriteter som är mer eller mindre vanligt förekommande i reglersystem. En olinjäritet som dock alltid förekommer
TENTAMEN I REGLERTEKNIK
 TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
Reglerteknik Z / Bt/I/Kf/F
 Reglerteknik Z / Bt/I/Kf/F Kurskod: SSY 050, ERE 080, ERE 091 Tentamen 2007-05-29 Tid: 8:30-12:30, Lokal: M-huset Lärare: Knut Åkesson tel 3717, 0701-74 95 25 Tentamen omfattar 25 poäng, där betyg tre
Reglerteknik Z / Bt/I/Kf/F Kurskod: SSY 050, ERE 080, ERE 091 Tentamen 2007-05-29 Tid: 8:30-12:30, Lokal: M-huset Lärare: Knut Åkesson tel 3717, 0701-74 95 25 Tentamen omfattar 25 poäng, där betyg tre
TSIU61: Reglerteknik. Sammanfattning av föreläsning 8 (2/2) Andra reglerstrukturer. ˆ Sammanfattning av föreläsning 8 ˆ Framkoppling från störsignalen
 Andra reglerstrukturer. ˆ Sammanfattning av föreläsning 8 ˆ Framkoppling från störsignalen") TSIU61 Föreläsning 9 HT1 2016 1 / 26 Innehåll föreläsning 9 TSIU61: Reglerteknik Föreläsning 9 Andra reglerstrukturer hendeby@isy.liu.se ˆ Sammanfattning av föreläsning 8 ˆ Framkoppling från referenssignalen
TSIU61 Föreläsning 9 HT1 2016 1 / 26 Innehåll föreläsning 9 TSIU61: Reglerteknik Föreläsning 9 Andra reglerstrukturer hendeby@isy.liu.se ˆ Sammanfattning av föreläsning 8 ˆ Framkoppling från referenssignalen
D/A- och A/D-omvandlarmodul MOD687-31
 D/A- och A/D-omvandlarmodul MOD687-31 Allmänt Modulen är helt självförsörjande, det enda du behöver för att komma igång är en 9VAC väggtransformator som du kopplar till jacket J2. När du så småningom vill
D/A- och A/D-omvandlarmodul MOD687-31 Allmänt Modulen är helt självförsörjande, det enda du behöver för att komma igång är en 9VAC väggtransformator som du kopplar till jacket J2. När du så småningom vill
TSIU61: Reglerteknik. de(t) dt + K D. Sammanfattning från föreläsning 4 (2/3) Frekvensbeskrivning. ˆ Bodediagram. Proportionell }{{} Integrerande
 dt + K D. Sammanfattning från föreläsning 4 (2/3) Frekvensbeskrivning. ˆ Bodediagram. Proportionell }{{} Integrerande") TSIU6 Föreläsning 5 Gustaf Hendeby HT 207 / 25 Innehåll föreläsning 5 TSIU6: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby ˆ Sammanfattning av föreläsning 4 ˆ Introduktion till
TSIU6 Föreläsning 5 Gustaf Hendeby HT 207 / 25 Innehåll föreläsning 5 TSIU6: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby ˆ Sammanfattning av föreläsning 4 ˆ Introduktion till
Implementering av PID-regulatorer med dator
 Implementering av PID-regulatorer med dator PID-reglering Styrlagen för en PID-regulator på standardform kan skrivas ) u(t) = K (e(t)+ 1Ti de e(τ)dτ +T d (t) = u P (t)+u I (t)+u D (t) där u(t) är styrsignalen
Implementering av PID-regulatorer med dator PID-reglering Styrlagen för en PID-regulator på standardform kan skrivas ) u(t) = K (e(t)+ 1Ti de e(τ)dτ +T d (t) = u P (t)+u I (t)+u D (t) där u(t) är styrsignalen
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING TID: 13 mars 2018, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 070-3113019 BESÖKER SALEN: 09.30,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING TID: 13 mars 2018, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 070-3113019 BESÖKER SALEN: 09.30,
Reglerteknik. Kurskod: IE1304. Datum: 12/ Tid: Examinator: Leif Lindbäck ( )
") Tentamen i Reglerteknik (IE1304) 12/3-2012 ES, Elektroniksystem Reglerteknik Kurskod: IE1304 Datum: 12/3-2012 Tid: 09.00-13.00 Examinator: Leif Lindbäck (7904425) Hjälpmedel: Formelsamling, dimensioneringsbilaga,
Tentamen i Reglerteknik (IE1304) 12/3-2012 ES, Elektroniksystem Reglerteknik Kurskod: IE1304 Datum: 12/3-2012 Tid: 09.00-13.00 Examinator: Leif Lindbäck (7904425) Hjälpmedel: Formelsamling, dimensioneringsbilaga,
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
EL1000/1120 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Tentamen Ordinarie tentamenstillfälle är fredagen den 15/1 kl.14.00-19.00 Obligatorisk föranmälan
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Tentamen Ordinarie tentamenstillfälle är fredagen den 15/1 kl.14.00-19.00 Obligatorisk föranmälan
Kort introduktion till Reglerteknik I
 Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars egenskaper vi vill studera/styra. Vi betraktar system som har
Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars egenskaper vi vill studera/styra. Vi betraktar system som har
ÅBO AKADEMI INTRODUKTION TILL SYSTEM- OCH REGLERTEKNIK
 ÅBO AKADEMI TEKNISKA FAKULTETEN Laboratoriet för reglerteknik FACULTY OF TECHNOLOGY Process Control Laboratory INTRODUKTION TILL SYSTEM- OCH REGLERTEKNIK HANNU TOIVONEN Biskopsgatan 8 FIN 20500 Åbo Finland
ÅBO AKADEMI TEKNISKA FAKULTETEN Laboratoriet för reglerteknik FACULTY OF TECHNOLOGY Process Control Laboratory INTRODUKTION TILL SYSTEM- OCH REGLERTEKNIK HANNU TOIVONEN Biskopsgatan 8 FIN 20500 Åbo Finland
Tentamen i Systemteknik/Processreglering
 Institutionen för REGLERTEKNIK Tentamen i Systemteknik/Processreglering 27 maj 2 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
Institutionen för REGLERTEKNIK Tentamen i Systemteknik/Processreglering 27 maj 2 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
För att få ett effektiv driftsätt kan det ibland behövas avancerad styrning.
 För att få ett effektiv driftsätt kan det ibland behövas avancerad styrning. Används för att reglera en process. T.ex. om man vill ha en bestämd nivå, eller ett speciellt tryck i en rörledning kanske.
För att få ett effektiv driftsätt kan det ibland behövas avancerad styrning. Används för att reglera en process. T.ex. om man vill ha en bestämd nivå, eller ett speciellt tryck i en rörledning kanske.
KO-pos positionsstyrning. Andreas Rönnqvist
 KO-pos positionsstyrning Andreas Rönnqvist Examensarbete för ingenjörsexamen (YH) Utbildningsprogrammet för elektroteknik Vasa 2012 EXAMENSARBETE Författare: Utbildningsprogram och ort: Inriktningsalternativ/Fördjupning:
KO-pos positionsstyrning Andreas Rönnqvist Examensarbete för ingenjörsexamen (YH) Utbildningsprogrammet för elektroteknik Vasa 2012 EXAMENSARBETE Författare: Utbildningsprogram och ort: Inriktningsalternativ/Fördjupning:
övningstentamen I DYNAMISKA SYSTEM OCH REGLERING
 övningstentamen I DYNAMISKA SYSTEM OCH REGLERING SAL: - TID: mars 27, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 73-9699 BESÖKER SALEN:
övningstentamen I DYNAMISKA SYSTEM OCH REGLERING SAL: - TID: mars 27, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 73-9699 BESÖKER SALEN:
Föreläsning 10, Egenskaper hos tidsdiskreta system
 Föreläsning 10, Egenskaper hos tidsdiskreta system Reglerteknik, IE1304 1 / 26 Innehåll Kapitel 18.1. Skillnad mellan analog och digital reglering 1 Kapitel 18.1. Skillnad mellan analog och digital reglering
Föreläsning 10, Egenskaper hos tidsdiskreta system Reglerteknik, IE1304 1 / 26 Innehåll Kapitel 18.1. Skillnad mellan analog och digital reglering 1 Kapitel 18.1. Skillnad mellan analog och digital reglering
En ideal op-förstärkare har oändlig inimedans, noll utimpedans och oändlig förstärkning.
 F5 LE1460 Analog elektronik 2005-11-23 kl 08.15 12.00 Alfa En ideal op-förstärkare har oändlig inimedans, noll utimpedans och oändlig förstärkning. ( Impedans är inte samma sak som resistans. Impedans
F5 LE1460 Analog elektronik 2005-11-23 kl 08.15 12.00 Alfa En ideal op-förstärkare har oändlig inimedans, noll utimpedans och oändlig förstärkning. ( Impedans är inte samma sak som resistans. Impedans
TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT62
 TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT6 Tid: Fredagen den 4 mars 8, kl 4.-8. Lokal: TER Ansvariga lärare: Inger Klein, 8 665 eller 73-96 99, Mikael Aslund, tel 8668 eller 77-4846 Hjälpmedel: Tabeller,
TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT6 Tid: Fredagen den 4 mars 8, kl 4.-8. Lokal: TER Ansvariga lärare: Inger Klein, 8 665 eller 73-96 99, Mikael Aslund, tel 8668 eller 77-4846 Hjälpmedel: Tabeller,
TENTAMEN I TSRT07 INDUSTRIELL REGLERTEKNIK
 TENTAMEN I TSRT07 INDUSTRIELL REGLERTEKNIK SAL: ISY:s datorsalar (Asgård) TID: 2016-08-17 kl. 8:00 12:00 KURS: TSRT07 Industriell reglerteknik PROVKOD: DAT1 INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG
TENTAMEN I TSRT07 INDUSTRIELL REGLERTEKNIK SAL: ISY:s datorsalar (Asgård) TID: 2016-08-17 kl. 8:00 12:00 KURS: TSRT07 Industriell reglerteknik PROVKOD: DAT1 INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG