Reglerteknik 1. Kapitel 1, 2, 3, 4. Köp bok och övningshäfte på kårbokhandeln. William Sandqvist
|
|
|
- Lena Åström
- för 9 år sedan
- Visningar:
Transkript
1 Reglerteknik 1 Kapitel 1, 2, 3, 4 Köp bok och övningshäfte på kårbokhandeln

2 Reglerteknik 1. Givare för yttertemperatur 2, 3. Givare för inomhustemperaturer Behaglig innetemperatur med hjälp av reglerteknik!

3 Reglerteknik = automatiskt, återkopplat system Styrsignaler Regulator Process bostadshus Reglerad temperatur Givare uppmätt temperatur Återkoppling

4 Fördelar med återkoppling Självkorrigerande Störningsdämpande Stabiliserande

5 Reglersystem kan ha två huvuduppgifter Konstantreglering kompensera för störningar Regulatorn justerar styrsignalen så att felet försvinner Följereglering, servosystem följa börvärdet Regulatorn svänger in styrsignalen mot det nya värdet

6 Exempel på reglersystem Förklara med ord

7 Exempel på reglersystem Förklara med ord

8

9 Ex. Fokusering med ögat

10 Ex. Fokusering i CDspelaren Fokus-signal: (A+C) - (B+D) Datasignal: A+B+C+D Det är en fyrkvadrant fotodiod som håller laserstrålen fokuserad i CDspelaren. Den fångar också upp datasignalen.

11

12 Blockschema Blockschemat är ett schematiskt och tydligt sätt att beskriva ett reglersystems funktion. Man använder tre symboler: Signaler Block Signaler Summerings/Differens punkter

13 Blockdiagram, exempel En tank har en variabel inloppstemperatur men man önskar att utloppstemperaturen hålls konstant.

14 Exempel Elspiral

15 Vattentanken (process) P

16 Temperaturgivaren

17 Jämförare Blocket jämförare brukar ritas som differenspunkt

18 Blockschemat

19

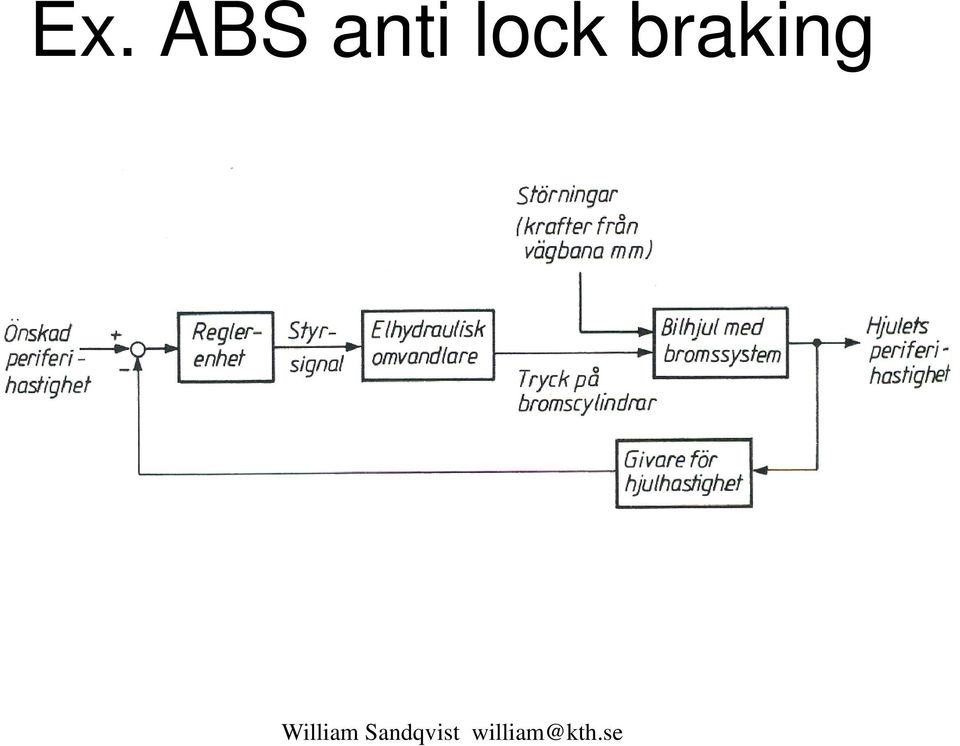
20 Ex. ABS anti lock braking
21 Givare integreras numera ofta i rena verkstadsprodukter Hjullagerenhet med integrerad ABS-sensor. SKF.
22 Induktiv ABS-givare (spole) Det tandade metallhjulet är inbakat i kullagrets plast-tätning! (ex. SKF)
23
24 Ö 3.1 Linjärt/Olinjärt a) Vilken motor är olinjär? b) Hur stor är den statiska förstärkningen för motor A? c) Hur stor är statiska förstärkningen för motor B? 0 < U < 6 respektive 12 < U < 18 V. A B
25 3.1 Facit: Linjärt/Olinjärt n k = = U 18 0 = 33[rpm/V] = k n = U = = 42 [rpm/v] k n = U = = 17 [rpm/v] A B k 2 k k 1
26
27 Statiska och dynamiska egenskaper Statiskt 75 C 1kW 1kW 75 C
28 Statiska och dynamiska egenskaper Dynamiskt 1kW 75 C 1kW 75 C efter ett tag
29 Processer och stegsvar Om börvärdet r är en stegändring får man processtorheten y i form av ett stegsvar. Processen kan ha: En tidskonstant Två tidskonstanter Dödtid Integration Översväng Omvänt stegsvar Instabilitet Testsignal: stegändring r y
30 Stegsvar en tidkonstant Varför inte lite ellära
31 Kommer Du ihåg? Snabbformel för exponentialfunktioner Typ. Stigande kurva x( t) =1 e t τ Typ. Fallande kurva x( t) = e t τ Snabbformel (ger direkt funktionen för en stigande/fallande kurva): x 0 = storhetens startvärde t x = storhetens slutvärde τ τ = förloppets tidkonstant x( t) = x ( x x0) e
32 Ö 3.2 Tidkonstant Figuren visar stegsvaret för två processer med en tidkonstant. Hur stor är tidkonstanten T för de båda processerna?
33 3.2 Facit: Tidkonstant 100% 63% 63% T 25[ms] 1[s] Tidkonstanten där tangenten skär asymtoten, eller vid 63% av slutvärdet. T
34 Hela swinget genom resten Kommer Du ihåg? = (1 x τ x X e ) = 1 e X t = τ ln t X X x = τ ln "hela" "resten" t τ ln 1 x X t = τ t = τ ln X x X
35 Ö 3.6 Tidkonstant a) För en viss process med en tidkonstant mätte man att det tog 12 sekunder för utsignalen att nå 50% av sitt slutvärde vid en stegformad signaländring. Hur stor är processens tidkonstant? b) För en annan process tog det 10 minuter att nå 90% av slutvärdet. Hur stor var processens tidkonstant?
36 3.6 Facit: Tidkonstant a) 12 sekunder för 50% T =? "hela" t = T ln 12 = T ln T = = 17,3[s] "resten" ln 2 b) 10 minuter för 90% T =? "hela" t = T ln 10 = T ln T = = "resten" ln10 4,34 [min]
37 Två tidkonstanter En tidkonstant för uppvärmningen av glödtråden den andra för uppvärmningen av ungsluften.
38 Dötid Transporttid
39 3.3 Tidkonstant och dötid Figuren visar stegsvaret för en process med dötid och en tidkonstant. Hur lång är dödtiden och stor är tidkonstanten T?
40 3.3 Facit: Tidkonstant och dötid 63% dötid 2 s T 2 s
41 Integrering
42 Integrerande Servomotorns position x är styrspänningen u tidsintegrerad.
43 Översväng
44 Med regulatorn kan man minimera översvängen!
45 Översväng? En styrd fräsmaskin får inte ha någon översväng! När den till sist når rätt värde är skadan redan skedd!
46 Omvänt stegsvar?
47 Inverterad pendel instabilt stegsvar
48
49 Egenskaper som återkoppling och regulator kan förbättra Störningsdämpning Störningarnas frekvens har betydelse Stabilitet BIBO = Begränsad Insignal Begränsad Outsignal Snabbhet Stigtid t r eller Insvängningstid t s5% Statisk noggrannhet Kvarvarande fel e efter lång tid är motsatsen till Robusthet Okänslighet för systemets dynamiska variationer, eller slitage Styrsignalsaktivitet Tillgänglig styrsignal är oftast begränsad
50 Störningsundertryckning Lågfrekventa eller högfrekventa störningar kan undertryckas
51 Stabilitet! Systemets stabilitet kan förbättras
52 Snabbhet Stigtid t r Insvängningstid t s5% Systemets stigtid eller insvängningstid kan förbättras
53 Statisk noggrannhet Kvarstående fel! Statiska noggrannheten efter stegändring kan förbättras
54 Statisk noggrannhet Statiska noggrannheten efter börvärdesändring eller störning kan förbättras
55 Begreppet typsiffra Typ noll hos systemet : Processens signal går mot ett ändligt värde vid en stegformad insignal Typ ett hos systemet : Processens signal växer oupphörligt vid en stegformad insignal (Senare i kursen) Typsiffran = antalet integratorer (1/s) i systemets slingförstärkning
56 Typsiffra (öppen krets) Testsignal: stegändring y #0 #1
57
58 Några klassiska reglerprinciper Tvålägesreglering (on/off) Flerlägesreglering Proportionell reglering Integrerande reglering PI -reglering Deriverande verkan och PID-reglering PD-reglering
59 Analog eller digital reglering? Moderna regulatorer använder alltid digital teknik. Reglerteorin kan vara analog eller digital. Kursen innehåller bådadera!
60 Tvålägesreglering on/off ex. Termostat En enkel form av reglering. Ger alltid upphov till svängningar. Ständiga växlingar av styrsignalvärdena kan ge stort mekaniskt slitage av styrutrustningen.
61 Termostatreglering
62 Proportionell reglering u = u 0 + K e u = u 0 normalvärde då felet e = 0. K är förstärkningen, kurvans lutning u/ e. U max och U min är regleringens begränsning.
63 Integrerande reglering u( t) = 1 T I t 0 e( t) dt e = 0 e = 0 ex. på integrerad felsignal u = 0 u 0
64 PI-reglering u( t) t 1 = K e( t) + e( t) dt TI 0 PI-regulatorns stegsvar på ett enhetssteg.
65 4.7 PI-regulator Figuren visar stegsvaret för en PI-regulator. Bestäm förstärkningen K och integrationstiden T I.
66 4.7 Facit: PI-regulator K = 0,75 u( t) t 1 = K e( t) + e( t) dt TI 0 2 0,75 0,75 = = T I 25[s]
67 Deriverande verkan och PIDreglering d u( t) = TD e( t) dt
68 u( t) PID-reglering t 1 = K e( t) + e( t) dt + T TI 0 D d dt e( t) D-signalen kan snabba på insvängningsförloppet.
69 Tolkning av PD-reglering d u( t) = K e( t) + TD e( t) dt PD-reglering är som P-reglering men med felsignalen extrapolerad fram med tiden T D.
70
71 4.8 PID-regulator Figuren visar felsignalen e in till en PID-regulator. Rita utsignalerna från de tre delarna P, I, och D.
72 4.8 PID-regulator
73 4.8 Facit: PID-regulator t 1 u( t) = K e( t) + e( t) dt + T TI 0 D d dt e( t) P-delen ger en direkt avbild av felsignalen. D-delen ger lutningen (=differens) av e-signalen (här samma som P-signalen). I-delen integrerar (=ackumulerad summa) e-signalen (här P-signalen).
74
75 4.11 Diskussionsfrågor a) Höga värden på förstärkningen K leder ofta till dålig stabilitet hos ett reglersystem med P-reglering. b) Processer med lång dötid är vanligen svårare att reglera än processer med kort dötid. c) Tvålägesreglering används främst i samband med enklare temperaturreglering. d) Med hjälp av deriverande verkan kan man ofta eliminera kvarstående fel hos ett reglersystem. e) Med hjälp av deriverande verkan kan man ofta förbättra stabiliteten hos ett reglersystem. Rätt Fel Rätt Fel Rätt Fel Rätt Fel Rätt Fel
76 4.11 Diskussionsfrågor f) Integrerande verkan kan aldrig användas ensam, den måste kombineras med andra reglerformer. g) En fördel med integrerande verkan är att kvarstående fel vid stegstörning normalt elimineras. h) Ju större förstärkning en P-regulator har, desto större blir också det proportionella bandet. i) Deriverande verkan bör användas med försiktighet om man har processer med kraftiga mätstörningar. Rätt Fel Rätt Fel Rätt Fel Rätt Fel
77 4.11 Facit: Diskussionsfrågor a) Rätt b) Rätt c) Rätt d) Fel e) Rätt f) Fel g) Rätt h) Fel i) Rätt
78
Signaler och reglersystem Kapitel 1-4. Föreläsning 1, Inledning Reglerteknik
 Signaler och reglersystem Kapitel 1-4 Föreläsning 1, Inledning Reglerteknik 1 Lärare Leif Lindbäck leifl@kth.se Tel 08 790 44 25 Jan Andersson janande@kth.se Tel i Kista 08 790 444 9 Tel i Flemingsberg
Signaler och reglersystem Kapitel 1-4 Föreläsning 1, Inledning Reglerteknik 1 Lärare Leif Lindbäck leifl@kth.se Tel 08 790 44 25 Jan Andersson janande@kth.se Tel i Kista 08 790 444 9 Tel i Flemingsberg
Överföringsfunktioner, blockscheman och analys av reglersystem
 Övning 3 i Mät- & Reglerteknik 2 (M112602, 3sp), MT-3, 2013. Överföringsfunktioner, blockscheman och analys av reglersystem Som ett led i att utveckla en autopilot för ett flygplan har man bestämt följande
Övning 3 i Mät- & Reglerteknik 2 (M112602, 3sp), MT-3, 2013. Överföringsfunktioner, blockscheman och analys av reglersystem Som ett led i att utveckla en autopilot för ett flygplan har man bestämt följande
2. Reglertekniska grunder
 2.1 Signaler och system 2.1 Signaler och system Ett system växelverkar med sin omgivning via insignaler, som påverkar systemets beteende utsignaler, som beskriver dess beteende Beroende på sammanhanget
2.1 Signaler och system 2.1 Signaler och system Ett system växelverkar med sin omgivning via insignaler, som påverkar systemets beteende utsignaler, som beskriver dess beteende Beroende på sammanhanget
LABORATIONSINSTRUKTION DIGITAL REGLERTEKNIK. Lab nr. 3 DIGITAL PI-REGLERING AV FÖRSTA ORDNINGENS PROCESS
 LABORATIONSINSTRUKTION DIGITAL REGLERTEKNIK Lab nr. 3 DIGITAL PI-REGLERING AV FÖRSTA ORDNINGENS PROCESS Obs! Alla förberedande uppgifter skall vara gjorda innan laborationstillfället! Namn: Program: Laborationen
LABORATIONSINSTRUKTION DIGITAL REGLERTEKNIK Lab nr. 3 DIGITAL PI-REGLERING AV FÖRSTA ORDNINGENS PROCESS Obs! Alla förberedande uppgifter skall vara gjorda innan laborationstillfället! Namn: Program: Laborationen
REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN
 AV REGLERTEKNIKEN") REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN Automatisk styra processer. Generell metodik Bengt Carlsson Huvudantagande: Processen kan påverkas med en styrsignal (insignal). Normalt behöver man kunna mäta
REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN Automatisk styra processer. Generell metodik Bengt Carlsson Huvudantagande: Processen kan påverkas med en styrsignal (insignal). Normalt behöver man kunna mäta
Lösningar till tentamen i styr- och reglerteknik (Med fet stil!)
") Lösningar till tentamen i styr- och reglerteknik (Med fet stil!) Uppgift 1 (4p) Figuren nedan visar ett reglersystem för nivån i en tank.utflödet från tanken styrs av en pump och har storleken V (m 3 /s).
Lösningar till tentamen i styr- och reglerteknik (Med fet stil!) Uppgift 1 (4p) Figuren nedan visar ett reglersystem för nivån i en tank.utflödet från tanken styrs av en pump och har storleken V (m 3 /s).
Datorövning Matlab/Simulink. Styr- och Reglerteknik för U3/EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 0803/ Thomas Munther Datorövning Matlab/Simulink i Styr- och Reglerteknik för U3/EI Laborationen förutsätter en del förberedelser
Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 0803/ Thomas Munther Datorövning Matlab/Simulink i Styr- och Reglerteknik för U3/EI Laborationen förutsätter en del förberedelser
2. Reglertekniska grunder
 2. Reglertekniska grunder 2.1 Signaler oc system Ett system växelverkar med sin omgivning via insignaler, som åverkar systemets beteende, oc utsignaler, som beskriver dess beteende. Beroende å sammananget
2. Reglertekniska grunder 2.1 Signaler oc system Ett system växelverkar med sin omgivning via insignaler, som åverkar systemets beteende, oc utsignaler, som beskriver dess beteende. Beroende å sammananget
Reglerteknik, TSIU 61
 Reglerteknik, TSIU 61 Föreläsning 8 Störningar, modellfel och svårstyrda system Reglerteknik, ISY, Linköpings Universitet Innehåll 2(15) 1. Sammanfattning av föreläsning 7 2. Känslighet mot störningar
Reglerteknik, TSIU 61 Föreläsning 8 Störningar, modellfel och svårstyrda system Reglerteknik, ISY, Linköpings Universitet Innehåll 2(15) 1. Sammanfattning av föreläsning 7 2. Känslighet mot störningar
Reglerteknik 6. Kapitel 10. Köp bok och övningshäfte på kårbokhandeln. William Sandqvist william@kth.se
 Reglerteknik 6 Kapitel Köp bok och övningshäfte på kårbokhandeln Föreläsning 6 kap Reglersystemets egenskaper Stabilitet är den viktigaste egenskapen. Ett ostabilt system är oanvändbart. Stabilitet är
Reglerteknik 6 Kapitel Köp bok och övningshäfte på kårbokhandeln Föreläsning 6 kap Reglersystemets egenskaper Stabilitet är den viktigaste egenskapen. Ett ostabilt system är oanvändbart. Stabilitet är
Kompletterande anteckningar för Mät- & Reglerteknik 1
 Kompletterande anteckningar för Mät- & Reglerteknik 1 Matias Waller 12 september 2011 Föreliggande anteckningar skall tjäna som ett stöd för undervisningen i Mät- & Reglerteknik 1: Någon ambition att göra
Kompletterande anteckningar för Mät- & Reglerteknik 1 Matias Waller 12 september 2011 Föreliggande anteckningar skall tjäna som ett stöd för undervisningen i Mät- & Reglerteknik 1: Någon ambition att göra
Reglerteknik M3, 5p. Tentamen 2008-08-27
 Reglerteknik M3, 5p Tentamen 2008-08-27 Tid: 08:30 12:30 Lokal: M-huset Kurskod: ERE031/ERE032/ERE033 Lärare: Knut Åkesson, tel 0701-749525 Läraren besöker tentamenssalen vid två tillfällen för att svara
Reglerteknik M3, 5p Tentamen 2008-08-27 Tid: 08:30 12:30 Lokal: M-huset Kurskod: ERE031/ERE032/ERE033 Lärare: Knut Åkesson, tel 0701-749525 Läraren besöker tentamenssalen vid två tillfällen för att svara
TSRT91 Reglerteknik: Föreläsning 2
 Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Systemteknik/Processreglering F2
 Systemteknik/Processreglering F2 Processmodeller Stegsvarsmodeller PID-regulatorn Läsanvisning: Process Control: 1.4, 2.1 2.5 Processmodeller I den här kursen kommer vi att huvudsakligen att jobba med
Systemteknik/Processreglering F2 Processmodeller Stegsvarsmodeller PID-regulatorn Läsanvisning: Process Control: 1.4, 2.1 2.5 Processmodeller I den här kursen kommer vi att huvudsakligen att jobba med
Tentamen i Reglerteknik, för D2/E2/T2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Lördagen den 15 Augusti kl.9.-13. 29 Sal: Tillåtna hjälpmedel: Valfri
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Lördagen den 15 Augusti kl.9.-13. 29 Sal: Tillåtna hjälpmedel: Valfri
Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen.
 Reglering Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen. Regulator eller reglerenhet används för att optimera
Reglering Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen. Regulator eller reglerenhet används för att optimera
Exempel: reglering av en plattreaktor. Varför systemteknik/processreglering? Blockdiagram. Blockdiagram för en (del)process. Exempel: tankprocess
process. Exempel: tankprocess") Systemteknik/reglering Föreläsning Vad är systemteknik oc reglerteknik? Blockdiagram Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling PID-reglering Läsanvisning: Control:..3 Vad
Systemteknik/reglering Föreläsning Vad är systemteknik oc reglerteknik? Blockdiagram Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling PID-reglering Läsanvisning: Control:..3 Vad
Tentamen i Styr- och Reglerteknik, för U3 och EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 2 december kl. 9-13, 29 Sal: R1122 Tillåtna hjälpmedel:
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 2 december kl. 9-13, 29 Sal: R1122 Tillåtna hjälpmedel:
Praktisk ProcessAutomation. Göran Malmberg Kim Nyborg
 Praktisk ProcessAutomation Göran Malmberg Kim Nyborg Kopieringsförbud! Kopiering av denna publikation är förbjuden enligt svensk lag. Skogsindustrins Utbildning i Markaryd AB Redaktör: Pär-Ola Folcker
Praktisk ProcessAutomation Göran Malmberg Kim Nyborg Kopieringsförbud! Kopiering av denna publikation är förbjuden enligt svensk lag. Skogsindustrins Utbildning i Markaryd AB Redaktör: Pär-Ola Folcker
Reglerteknik. Kurskod: IE1304. Datum: 12/ Tid: Examinator: Leif Lindbäck ( )
") Tentamen i Reglerteknik (IE1304) 12/3-2012 ES, Elektroniksystem Reglerteknik Kurskod: IE1304 Datum: 12/3-2012 Tid: 09.00-13.00 Examinator: Leif Lindbäck (7904425) Hjälpmedel: Formelsamling, dimensioneringsbilaga,
Tentamen i Reglerteknik (IE1304) 12/3-2012 ES, Elektroniksystem Reglerteknik Kurskod: IE1304 Datum: 12/3-2012 Tid: 09.00-13.00 Examinator: Leif Lindbäck (7904425) Hjälpmedel: Formelsamling, dimensioneringsbilaga,
Regulator. G (s) Figur 1: Blockdiagram för ett typiskt reglersystem
 Figur 1: Blockdiagram för ett typiskt reglersystem") Rs) + Σ Es) Regulator G s) R Us) Process G s) P Ys) Figur : Blockdiagram för ett typiskt reglersystem Något om PID-reglering PID-regulatorn består av proportionell del, integrerande del och deriverande
Rs) + Σ Es) Regulator G s) R Us) Process G s) P Ys) Figur : Blockdiagram för ett typiskt reglersystem Något om PID-reglering PID-regulatorn består av proportionell del, integrerande del och deriverande
MODELLERING AV DYNAMISKA SYSTEM OCH INLUPP 2
 UPPSALA UNIVERSITET AVDELNINGEN FÖR SYSTEMTEKNIK EKL och PSA, 2002, rev BC 2009, 2013 MODELLERING AV DYNAMISKA SYSTEM DATORSTÖDD RÄKNEÖVNING OCH INLUPP 2 1. Överföringsfunktioner 2. Tillståndsmetodik Förberedelseuppgifter:
UPPSALA UNIVERSITET AVDELNINGEN FÖR SYSTEMTEKNIK EKL och PSA, 2002, rev BC 2009, 2013 MODELLERING AV DYNAMISKA SYSTEM DATORSTÖDD RÄKNEÖVNING OCH INLUPP 2 1. Överföringsfunktioner 2. Tillståndsmetodik Förberedelseuppgifter:
Reglerteknik Z2. Kurskod: SSY 050 och ERE080. Tentamen 2006-08-24
 Reglerteknik Z2 Kurskod: SSY 050 och ERE080 Tentamen 2006-08-24 Tid: 14:00-18:00, Lokal: V-huset Lärare: Goran Cengic tel 3729, 073-903 70 10 Tentamen omfattar 25 poäng, där betyg tre fordrar 10 poäng,
Reglerteknik Z2 Kurskod: SSY 050 och ERE080 Tentamen 2006-08-24 Tid: 14:00-18:00, Lokal: V-huset Lärare: Goran Cengic tel 3729, 073-903 70 10 Tentamen omfattar 25 poäng, där betyg tre fordrar 10 poäng,
Tentamen i Reglerteknik. 7,5 hp varav tentamen ger 4,5 hp
 KTH-ICT-ES Tentamen i Reglerteknik. 7,5 hp varav tentamen ger 4,5 hp Kurskod: IE304 Datum: 0-03-4 Tid: 9.00-3.00 Examinatorer: Jan Andersson och Leif Lindbäck Tentamensinformation: Hjälpmedel: Bilagd formelsamling,
KTH-ICT-ES Tentamen i Reglerteknik. 7,5 hp varav tentamen ger 4,5 hp Kurskod: IE304 Datum: 0-03-4 Tid: 9.00-3.00 Examinatorer: Jan Andersson och Leif Lindbäck Tentamensinformation: Hjälpmedel: Bilagd formelsamling,
Industriella styrsystem, TSIU06. Föreläsning 2
 Industriella styrsystem, TSIU06 Föreläsning 2 Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 1 2(24) Det finns en stor mängd system och processer som behöver styras. Återkopplingsprincipen:
Industriella styrsystem, TSIU06 Föreläsning 2 Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 1 2(24) Det finns en stor mängd system och processer som behöver styras. Återkopplingsprincipen:
Industriella styrsystem, TSIU06. Föreläsning 1
 Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Kursöversikt 2(34) Detta är en laborations- och projektkurs. Praktiken kommer före teorin (kursen Reglerteknik) Tre
Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Kursöversikt 2(34) Detta är en laborations- och projektkurs. Praktiken kommer före teorin (kursen Reglerteknik) Tre
Processidentifiering och Polplacerad Reglering
 UmU/TFE Laboration Processidentifiering och Polplacerad Reglering Introduktion Referenser till teoriavsnitt följer här. Processidentifiering: Kursbok kap 17.3-17.4. Jämför med det sista exemplet i kap
UmU/TFE Laboration Processidentifiering och Polplacerad Reglering Introduktion Referenser till teoriavsnitt följer här. Processidentifiering: Kursbok kap 17.3-17.4. Jämför med det sista exemplet i kap
vt 04 Teori Se din kursbok under avsnitt PID-reglering, Ziegler-Nichols metod och olinjära system.
 vt 04 Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet PID - NIVÅREGLERING AV TANK Målsättning Målet med denna laboration är att visa hur PID-reglering
vt 04 Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet PID - NIVÅREGLERING AV TANK Målsättning Målet med denna laboration är att visa hur PID-reglering
Industriella Styrsystem Övningskompendium
 Industriella Styrsystem Övningskompendium 14 mars 2013 REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING Reglerteknik, Institutionen för systemteknik, Linköpings universitet, 581 83 Linköping www.control.isy.liu.se
Industriella Styrsystem Övningskompendium 14 mars 2013 REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING Reglerteknik, Institutionen för systemteknik, Linköpings universitet, 581 83 Linköping www.control.isy.liu.se
Simulering och reglerteknik för kemister
 Simulering och reglerteknik för kemister Gå till http://techteach.no/kybsim/index_eng.htm och gå igenom några av följande exempel. http://techteach.no/kybsim/index_eng.htm Följ gärna de beskrivningarna
Simulering och reglerteknik för kemister Gå till http://techteach.no/kybsim/index_eng.htm och gå igenom några av följande exempel. http://techteach.no/kybsim/index_eng.htm Följ gärna de beskrivningarna
INLÄMNINGSUPPGIFT I. REGLERTEKNIK I för STS3 & X4
 SYSTEMTEKNIK, IT-INSTITUTIONEN UPPSALA UNIVERSITET DZ 2015-09 INLÄMNINGSUPPGIFTER REGLERTEKNIK I för STS3 & X4 INLÄMNINGSUPPGIFT I Inlämning: Senast fredag den 2:a oktober kl 15.00 Lämnas i fack nr 30,
SYSTEMTEKNIK, IT-INSTITUTIONEN UPPSALA UNIVERSITET DZ 2015-09 INLÄMNINGSUPPGIFTER REGLERTEKNIK I för STS3 & X4 INLÄMNINGSUPPGIFT I Inlämning: Senast fredag den 2:a oktober kl 15.00 Lämnas i fack nr 30,
Föreläsning 2. Reglerteknik AK. c Bo Wahlberg. 3 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Industriella styrsystem, TSIU06. Föreläsning 1
 Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Utgångspunkter Vad? Varför? Hur? Vad? Reglerteknik - Konsten att styra system automatiskt Vad? System - Ett objekt
Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Utgångspunkter Vad? Varför? Hur? Vad? Reglerteknik - Konsten att styra system automatiskt Vad? System - Ett objekt
Tentamen i Systemteknik/Processreglering
 Institutionen för REGLERTEKNIK Tentamen i Systemteknik/Processreglering 22 augusti 2011 kl 14 19 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen
Institutionen för REGLERTEKNIK Tentamen i Systemteknik/Processreglering 22 augusti 2011 kl 14 19 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen
AUTOMATIC CONTROL REGLERTEKNIK LINKÖPINGS UNIVERSITET. M. Enqvist TTIT62: Föreläsning 2. Här är
 Martin Enqvist Återkoppling, PID-reglering, specifikationer Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(21) Exempel: Farthållare i en bil 4(21) Välj
Martin Enqvist Återkoppling, PID-reglering, specifikationer Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(21) Exempel: Farthållare i en bil 4(21) Välj
TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT62
 TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT62 Tid: Tisdagen den 2 juni 27, kl 4.-8. Lokal: TER Ansvariga lärare: Inger Klein, 28 665 eller 73-9699, Calin Curescu, 28 937 eller 73-54355 Hjälpmedel:
TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT62 Tid: Tisdagen den 2 juni 27, kl 4.-8. Lokal: TER Ansvariga lärare: Inger Klein, 28 665 eller 73-9699, Calin Curescu, 28 937 eller 73-54355 Hjälpmedel:
Reglerteori, TSRT09. Föreläsning 4: Kalmanfiltret & det slutna systemet. Torkel Glad. Reglerteknik, ISY, Linköpings Universitet
 Reglerteori, TSRT09 Föreläsning 4: Kalmanfiltret & det slutna systemet Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 3 2(19) Kovariansfunktion: Spektrum: R u (τ) = Eu(t)u(t τ)
Reglerteori, TSRT09 Föreläsning 4: Kalmanfiltret & det slutna systemet Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 3 2(19) Kovariansfunktion: Spektrum: R u (τ) = Eu(t)u(t τ)
TSRT09 Reglerteori. Sammanfattning av Föreläsning 3. Sammanfattning av Föreläsning 3, forts. Sammanfattning av Föreläsning 3, forts.
 Reglerteori 2016, Föreläsning 4 Daniel Axehill 1 / 18 Sammanfattning av Föreläsning 3 Kovariansfunktion: TSRT09 Reglerteori Föreläsning 4: Kalmanfiltret & det slutna systemet Daniel Axehill Reglerteknik,
Reglerteori 2016, Föreläsning 4 Daniel Axehill 1 / 18 Sammanfattning av Föreläsning 3 Kovariansfunktion: TSRT09 Reglerteori Föreläsning 4: Kalmanfiltret & det slutna systemet Daniel Axehill Reglerteknik,
Temperaturreglering. En jämförelse mellan en P- och en PI-regulator. θ (t) Innehåll Målsättning sid 2
 Innehåll Målsättning sid 2") 2008-02-12 UmU TFE/Bo Tannfors Temperaturreglering En jämförelse mellan en P- och en PI-regulator θ i w θ θ u θ Innehåll Målsättning sid 2 Teori 2 Förberedelseuppgifter 2 Förutsättningar och uppdrag 3
2008-02-12 UmU TFE/Bo Tannfors Temperaturreglering En jämförelse mellan en P- och en PI-regulator θ i w θ θ u θ Innehåll Målsättning sid 2 Teori 2 Förberedelseuppgifter 2 Förutsättningar och uppdrag 3
Vad är systemteknik och reglerteknik? Föreläsning 1. Systemteknik handlar om dynamiska system
 1 Föreläsning 1 Vad är systemteknik oc reglerteknik? Grundläggande begrepp Grafiska representationer Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling Vad är systemteknik oc reglerteknik?
1 Föreläsning 1 Vad är systemteknik oc reglerteknik? Grundläggande begrepp Grafiska representationer Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling Vad är systemteknik oc reglerteknik?
Tentamen i Reglerteknik. 7,5 hp varav tentamen ger 4,5 hp
 KTH-ICT-ES Tentamen i eglerteknik. 7,5 hp varav tentamen ger 4,5 hp Kurskod: IE304 Datum: 20-06-09 Tid: 9.00-3.00 Examinatorer: Jan Andersson och Leif Lindbäck Tentamensinformation: Hjälpmedel: Bilagd
KTH-ICT-ES Tentamen i eglerteknik. 7,5 hp varav tentamen ger 4,5 hp Kurskod: IE304 Datum: 20-06-09 Tid: 9.00-3.00 Examinatorer: Jan Andersson och Leif Lindbäck Tentamensinformation: Hjälpmedel: Bilagd
REGLERTEKNIK Laboration 5
 6 SAMPLADE SYSTEM 6. Sampling av signaler När man använder en dator som regulator, kan man endast behandla signaler i diskreta tidpunkter. T.ex. mäts systemets utsignal i tidpunkter med visst mellanrum,
6 SAMPLADE SYSTEM 6. Sampling av signaler När man använder en dator som regulator, kan man endast behandla signaler i diskreta tidpunkter. T.ex. mäts systemets utsignal i tidpunkter med visst mellanrum,
Tentamen i Reglerteknik, för D2/E2/T2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Torsdagen den 3 Juni kl.9.-13. 21 Sal: R1122 Tillåtna hjälpmedel: Valfri
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Torsdagen den 3 Juni kl.9.-13. 21 Sal: R1122 Tillåtna hjälpmedel: Valfri
Innehåll. Vad är reglerteknik? Forskning inom processtyrning - Resurseffektiv avloppsvattenrening genom reglerteknik
 Forskning inom processtyrning - Resurseffektiv avloppsvattenrening genom reglerteknik Bengt Carlsson Uppsala universitet Innehåll Vad är reglerteknik? (kortversionen!) Överordnad syrereglering ILC ett
Forskning inom processtyrning - Resurseffektiv avloppsvattenrening genom reglerteknik Bengt Carlsson Uppsala universitet Innehåll Vad är reglerteknik? (kortversionen!) Överordnad syrereglering ILC ett
Reglerteknik, TSIU 61
 Reglerteknik, TSIU 61 Föreläsning 7 Regulatorkonstruktion i Bodediagram Reglerteknik, ISY, Linköpings Universitet Innehåll 2(18) 1. Sammanfattning av föreläsning 6 2. Hur ställer man in en PID-regulator
Reglerteknik, TSIU 61 Föreläsning 7 Regulatorkonstruktion i Bodediagram Reglerteknik, ISY, Linköpings Universitet Innehåll 2(18) 1. Sammanfattning av föreläsning 6 2. Hur ställer man in en PID-regulator
TSIU61: Reglerteknik. Sammanfattning från föreläsning 3 (2/4) ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.
 ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.") TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING TID: 13 mars 2018, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 070-3113019 BESÖKER SALEN: 09.30,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING TID: 13 mars 2018, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 070-3113019 BESÖKER SALEN: 09.30,
TSIU61: Reglerteknik. PID-reglering Specifikationer. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
Tillämpningar av fysik och dynamik i biologiska system 2007-11-21, kl. 09:00-15:00
 Umeå universitet Tillämpad fysik och elektronik Staffan Grundberg Bo Tannfors Tentamen i elektronik: Hjälpmedel: Tillämpningar av fysik och dynamik i biologiska system 2007--2, kl. 09:00-5:00 Reglerteknikformelsamling,
Umeå universitet Tillämpad fysik och elektronik Staffan Grundberg Bo Tannfors Tentamen i elektronik: Hjälpmedel: Tillämpningar av fysik och dynamik i biologiska system 2007--2, kl. 09:00-5:00 Reglerteknikformelsamling,
ÅBO AKADEMI INTRODUKTION TILL SYSTEM- OCH REGLERTEKNIK
 ÅBO AKADEMI TEKNISKA FAKULTETEN Laboratoriet för reglerteknik FACULTY OF TECHNOLOGY Process Control Laboratory INTRODUKTION TILL SYSTEM- OCH REGLERTEKNIK HANNU TOIVONEN Biskopsgatan 8 FIN 20500 Åbo Finland
ÅBO AKADEMI TEKNISKA FAKULTETEN Laboratoriet för reglerteknik FACULTY OF TECHNOLOGY Process Control Laboratory INTRODUKTION TILL SYSTEM- OCH REGLERTEKNIK HANNU TOIVONEN Biskopsgatan 8 FIN 20500 Åbo Finland
Laplacetransform, poler och nollställen
 Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Industriell reglerteknik: Föreläsning 4
 Föreläsningar / 25 Industriell reglerteknik: Föreläsning 4 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Föreläsningar / 25 Industriell reglerteknik: Föreläsning 4 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Lösningar till tentamen i Industriell reglerteknik TSRT07 Tentamensdatum: Martin Enqvist
 ösningar till tentamen i Industriell reglerteknik TSRT7 Tentamensdatum: 28-3-2 Martin Enqvist a) Z-transformering av sambanden som beskriver den tidsdiskreta regulatorn ger Iz) = KT Sz T i z ) Ez) = Kz
ösningar till tentamen i Industriell reglerteknik TSRT7 Tentamensdatum: 28-3-2 Martin Enqvist a) Z-transformering av sambanden som beskriver den tidsdiskreta regulatorn ger Iz) = KT Sz T i z ) Ez) = Kz
Industriell reglerteknik: Föreläsning 6
 Föreläsningar 1 / 15 Industriell reglerteknik: Föreläsning 6 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Föreläsningar 1 / 15 Industriell reglerteknik: Föreläsning 6 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Reglerteknik M3. Inlämningsuppgift 3. Lp II, 2006. Namn:... Personnr:... Namn:... Personnr:...
 Reglerteknik M3 Inlämningsuppgift 3 Lp II, 006 Namn:... Personnr:... Namn:... Personnr:... Uppskattad tid, per person, för att lösa inlämningsuppgiften:... Godkänd Datum:... Signatur:... Påskriften av
Reglerteknik M3 Inlämningsuppgift 3 Lp II, 006 Namn:... Personnr:... Namn:... Personnr:... Uppskattad tid, per person, för att lösa inlämningsuppgiften:... Godkänd Datum:... Signatur:... Påskriften av
2E1112 Elektrisk mätteknik
 2E1112 Elektrisk mätteknik Mikrosystemteknik Osquldas väg 10, 100 44 Stockholm Tentamen för fd E3 2007-12-21 kl 8 12 Tentan består av: 1 uppgift med 6 kortsvarsfrågor som vardera ger 1 p. 5 uppgifter med
2E1112 Elektrisk mätteknik Mikrosystemteknik Osquldas väg 10, 100 44 Stockholm Tentamen för fd E3 2007-12-21 kl 8 12 Tentan består av: 1 uppgift med 6 kortsvarsfrågor som vardera ger 1 p. 5 uppgifter med
Teori Se din kursbok under avsnitt PID-reglering, Ziegler-Nichols metod och olinjära system (avsnitt 7.7 i Modern Reglerteknik av Bertil Thomas).
.") 03-10-14/TFE CJ, BT, BaE, SG Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet PID - NIVÅREGLERING AV TANK Målsättning Målet med denna laboration
03-10-14/TFE CJ, BT, BaE, SG Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet PID - NIVÅREGLERING AV TANK Målsättning Målet med denna laboration
Industriella styrsystem, TSIU04. Föreläsning 1
 Industriella styrsystem, TSIU04 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Mål Ge kunskaper och färdigheter om reglerteknik närmare verkligheten. Mera precist: Trimning av PID-regulatorer.
Industriella styrsystem, TSIU04 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Mål Ge kunskaper och färdigheter om reglerteknik närmare verkligheten. Mera precist: Trimning av PID-regulatorer.
Tentamen i Reglerteknik, 4p för D2/E2/T2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, 4p för D2/E2/T2 Tid: Måndagen den 28 maj kl.9.-13. 27 Sal: R1122 Tillåtna hjälpmedel: Valfri
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, 4p för D2/E2/T2 Tid: Måndagen den 28 maj kl.9.-13. 27 Sal: R1122 Tillåtna hjälpmedel: Valfri
Kort introduktion till Reglerteknik I
 Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. 1 / 12 alexander.medvedev@it.uu.se Intro Kort introduktion till Reglerteknik I Vad är reglerteknik?
Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. 1 / 12 alexander.medvedev@it.uu.se Intro Kort introduktion till Reglerteknik I Vad är reglerteknik?
Reglerteknik 3. Kapitel 7. Köp bok och övningshäfte på kårbokhandeln. William Sandqvist
 eglerteknik 3 Kapitel 7 Köp bok och övningshäfte på kårbokhandeln Lektion 3 kap 7 Modellering Identifiering Teoretisk modellering Man använder grundläggande fysikaliska naturlagar och deras ekvationer
eglerteknik 3 Kapitel 7 Köp bok och övningshäfte på kårbokhandeln Lektion 3 kap 7 Modellering Identifiering Teoretisk modellering Man använder grundläggande fysikaliska naturlagar och deras ekvationer
Tentamen i Krets- och mätteknik, fk - ETEF15
 Tentamen i Krets- och mätteknik, fk - ETEF15 Institutionen för elektro- och informationsteknik LTH, Lund University 2015-10-29 8.00-13.00 Uppgifterna i tentamen ger totalt 60. Uppgifterna är inte ordnade
Tentamen i Krets- och mätteknik, fk - ETEF15 Institutionen för elektro- och informationsteknik LTH, Lund University 2015-10-29 8.00-13.00 Uppgifterna i tentamen ger totalt 60. Uppgifterna är inte ordnade
KO-pos positionsstyrning. Andreas Rönnqvist
 KO-pos positionsstyrning Andreas Rönnqvist Examensarbete för ingenjörsexamen (YH) Utbildningsprogrammet för elektroteknik Vasa 2012 EXAMENSARBETE Författare: Utbildningsprogram och ort: Inriktningsalternativ/Fördjupning:
KO-pos positionsstyrning Andreas Rönnqvist Examensarbete för ingenjörsexamen (YH) Utbildningsprogrammet för elektroteknik Vasa 2012 EXAMENSARBETE Författare: Utbildningsprogram och ort: Inriktningsalternativ/Fördjupning:
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
Lektion 5: Sensorer och givare. 5MT030: Automation - Lektion 5 p. 1
 Lektion 5: Sensorer och givare 5MT030: Automation - Lektion 5 p. 1 Lektion 5: Dragonfly 5MT030: Automation - Lektion 5 p. 2 Lektion 5: Innehåll Givartyper Analoga- och digitala givare 5MT030: Automation
Lektion 5: Sensorer och givare 5MT030: Automation - Lektion 5 p. 1 Lektion 5: Dragonfly 5MT030: Automation - Lektion 5 p. 2 Lektion 5: Innehåll Givartyper Analoga- och digitala givare 5MT030: Automation
Lunds Tekniska Högskola Avdelningen för industriell elektroteknik och automation
 Lunds Universitet LTH Ingenjörshögskolan i Helsingborg Lunds Tekniska Högskola Avdelningen för industriell elektroteknik och automation REGLERTEKNIK Laboration 2 Empirisk undersökning av PID-regulator
Lunds Universitet LTH Ingenjörshögskolan i Helsingborg Lunds Tekniska Högskola Avdelningen för industriell elektroteknik och automation REGLERTEKNIK Laboration 2 Empirisk undersökning av PID-regulator
Att tänka i nya banor. Energi- och miljöproblemen är globala. Vi kan alla göra lite mer.
 Att tänka i nya banor Energi- och miljöproblemen är globala. Vi kan alla göra lite mer. Den förvillande formeln Sänk en (1 o) grad spara fem procent (5%) Det mest spridda påståendena om energi och besparingar:
Att tänka i nya banor Energi- och miljöproblemen är globala. Vi kan alla göra lite mer. Den förvillande formeln Sänk en (1 o) grad spara fem procent (5%) Det mest spridda påståendena om energi och besparingar:
EXAMENSARBETE. Optimering av stripper och metanolanläggning
 EXAMENSARBETE 2008:020 CIV Optimering av stripper och metanolanläggning Peter Segerstedt Luleå tekniska universitet Civilingenjörsprogrammet Elektroteknik Institutionen för Systemteknik Avdelningen för
EXAMENSARBETE 2008:020 CIV Optimering av stripper och metanolanläggning Peter Segerstedt Luleå tekniska universitet Civilingenjörsprogrammet Elektroteknik Institutionen för Systemteknik Avdelningen för
En översikt av Kap 7. Tillbakablick, återkoppling Informationsteknologi Reglering av vätskenivån i en tank. Framkoppling. Informationsteknologi
 Bengt Carlsson Avd f... och även i reningsverk En översikt av Kap 7 Tekniken i Kap 7 är vanlig i många industriella tillämpningar (t ex kärnkraftver och för klimatreglering i byggnader llbakablick, återkoppling
Bengt Carlsson Avd f... och även i reningsverk En översikt av Kap 7 Tekniken i Kap 7 är vanlig i många industriella tillämpningar (t ex kärnkraftver och för klimatreglering i byggnader llbakablick, återkoppling
För att få ett effektiv driftsätt kan det ibland behövas avancerad styrning.
 För att få ett effektiv driftsätt kan det ibland behövas avancerad styrning. Används för att reglera en process. T.ex. om man vill ha en bestämd nivå, eller ett speciellt tryck i en rörledning kanske.
För att få ett effektiv driftsätt kan det ibland behövas avancerad styrning. Används för att reglera en process. T.ex. om man vill ha en bestämd nivå, eller ett speciellt tryck i en rörledning kanske.
Välkomna till TSRT19 Reglerteknik M Föreläsning 1
 Välkomna till TSRT19 Reglerteknik M Föreläsning 1 Johan Löfberg Avdelningen för reglerteknik Institutionen för systemteknik johanl@isy.liu.se Tel: 281304 Kontor: B-huset ingång 23-25 www.control.isy.liu.se/student/tsrt19ht2
Välkomna till TSRT19 Reglerteknik M Föreläsning 1 Johan Löfberg Avdelningen för reglerteknik Institutionen för systemteknik johanl@isy.liu.se Tel: 281304 Kontor: B-huset ingång 23-25 www.control.isy.liu.se/student/tsrt19ht2
Kort introduktion till Reglerteknik I
 Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars egenskaper vi vill studera/styra. Vi betraktar system som har
Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars egenskaper vi vill studera/styra. Vi betraktar system som har
Reglerteknik. Datum: 20/ Tid: Examinator: Leif Lindbäck ( ) Hjälpmedel: Formelsamling, dimensioneringsbilaga, miniräknare.
 Hjälpmedel: Formelsamling, dimensioneringsbilaga, miniräknare.") Tentamen i Reglerteknik (IE1304) 20/3-2014 ES, Elektroniksystem Reglerteknik Kurskod: IE1304 Datum: 20/3-2014 Tid: 09.00-13.00 Examinator: Leif Lindbäck (7904425) Hjälpmedel: Formelsamling, dimensioneringsbilaga,
Tentamen i Reglerteknik (IE1304) 20/3-2014 ES, Elektroniksystem Reglerteknik Kurskod: IE1304 Datum: 20/3-2014 Tid: 09.00-13.00 Examinator: Leif Lindbäck (7904425) Hjälpmedel: Formelsamling, dimensioneringsbilaga,
Op-förstärkarens grundkopplingar. Del 2, växelspänningsförstärkning.
 Op-förstärkarens grundkopplingar. Del 2, växelspänningsförstärkning. I del 1 bekantade vi oss med op-förstärkaren som likspänningsförstärkare. För att kunna arbeta med op-förstärkaren vill vi kunna mäta
Op-förstärkarens grundkopplingar. Del 2, växelspänningsförstärkning. I del 1 bekantade vi oss med op-förstärkaren som likspänningsförstärkare. För att kunna arbeta med op-förstärkaren vill vi kunna mäta
G(s) = 5s + 1 s(10s + 1)
 = 5s + 1 s(10s + 1)") Projektuppgift 1: Integratoruppvridning I kursen behandlas ett antal olika typer av olinjäriteter som är mer eller mindre vanligt förekommande i reglersystem. En olinjäritet som dock alltid förekommer
Projektuppgift 1: Integratoruppvridning I kursen behandlas ett antal olika typer av olinjäriteter som är mer eller mindre vanligt förekommande i reglersystem. En olinjäritet som dock alltid förekommer
Styr- och Reglerteknik för U3/EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071118/ Thomas Munther LABORATION 4 i Styr- och Reglerteknik för U3/EI2 Målsättning: Använda tumregler för att ställa
Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071118/ Thomas Munther LABORATION 4 i Styr- och Reglerteknik för U3/EI2 Målsättning: Använda tumregler för att ställa
Tentamen i Styr- och Reglerteknik, för U3 och EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 12 Augusti kl. 9-13, 29 Sal: - Tillåtna hjälpmedel:
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 12 Augusti kl. 9-13, 29 Sal: - Tillåtna hjälpmedel:
A
 Lunds Universitet LTH Ingenjorshogskolan i Helsingborg Tentamen i Reglerteknik 2008{05{29. Ett system beskrivs av foljande in-utsignalsamband: dar u(t) ar insignal och y(t) utsignal. d 2 y dt 2 + dy du
Lunds Universitet LTH Ingenjorshogskolan i Helsingborg Tentamen i Reglerteknik 2008{05{29. Ett system beskrivs av foljande in-utsignalsamband: dar u(t) ar insignal och y(t) utsignal. d 2 y dt 2 + dy du
Utbildning i reglerteknik. Ett samarbete inom ProcessIT mellan LTU och Optimation
 Utbildning i reglerteknik Ett samarbete inom ProcessIT mellan LTU och Optimation Upplägg Grov planering Seminarium Riktat mot en bredare publik än bara kursdeltagarna. Syftar till att skapa en förståelse
Utbildning i reglerteknik Ett samarbete inom ProcessIT mellan LTU och Optimation Upplägg Grov planering Seminarium Riktat mot en bredare publik än bara kursdeltagarna. Syftar till att skapa en förståelse
Styr- och Reglerteknik för U3/EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071111/ Thomas Munther LABORATION 3 i Styr- och Reglerteknik för U3/EI2 Målsättning: Bekanta sig med olika processer.
Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071111/ Thomas Munther LABORATION 3 i Styr- och Reglerteknik för U3/EI2 Målsättning: Bekanta sig med olika processer.
Reglerteknik 7. Kapitel 11. Köp bok och övningshäfte på kårbokhandeln. William Sandqvist
 Reglerteknik 7 Kapitel Köp bok och övningshäfte på kårbokhandeln Föreläsning 7 kap Dimensionering av analoga reglersystem. Tumregelmetoder Bodediagram (Kompenseringsfilter) Simulering MATLAB-programmet
Reglerteknik 7 Kapitel Köp bok och övningshäfte på kårbokhandeln Föreläsning 7 kap Dimensionering av analoga reglersystem. Tumregelmetoder Bodediagram (Kompenseringsfilter) Simulering MATLAB-programmet
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: Ter2 TID:4 mars 207, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 0730-9699 BESÖKER SALEN:
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: Ter2 TID:4 mars 207, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 0730-9699 BESÖKER SALEN:
Undersökning av inställningsmetoder för PID-regulatorer
 Undersökning av inställningsmetoder för PID-regulatorer A study of methods for tuning PID-controllers Examensarbete i Elektroingenjörsprogrammet SUSANNE LUNDELL Institutionen för Signaler och System CHALMERS
Undersökning av inställningsmetoder för PID-regulatorer A study of methods for tuning PID-controllers Examensarbete i Elektroingenjörsprogrammet SUSANNE LUNDELL Institutionen för Signaler och System CHALMERS
G VG MVG Programspecifika mål och kriterier
 Betygskriterier Matematik C MA10 100p Respektive programmål gäller över kurskriterierna MA10 är en nationell kurs oc skolverkets kurs- oc betygskriterier finns på ttp://www.skolverket.se/ Detta är vår
Betygskriterier Matematik C MA10 100p Respektive programmål gäller över kurskriterierna MA10 är en nationell kurs oc skolverkets kurs- oc betygskriterier finns på ttp://www.skolverket.se/ Detta är vår
Värme- och tappvarmvattenregulator med optimeringsfunktioner 1999.12
 TAC 2222 C-10-44 Värme- och tappvarmvattenregulator med optimeringsfunktioner 1999.12 TAC 2222 erbjuder kombinerad värme- och tappvarmvattenreglering för vattenburna värmesystem. Radiatorkretsen regleras
TAC 2222 C-10-44 Värme- och tappvarmvattenregulator med optimeringsfunktioner 1999.12 TAC 2222 erbjuder kombinerad värme- och tappvarmvattenreglering för vattenburna värmesystem. Radiatorkretsen regleras
Välkomna till TSRT19 Reglerteknik Föreläsning 3. Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula
 Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Regulatorer Avfrostningsregulatorer Differentialtermostater Multistegsregulatorer
 regulator Regulatorer Avfrostningsregulatorer Differentialtermostater Multistegsregulatorer R Regulator Regulator 2-Steg R38S Elektronisk panelmonterad 2 stegsregulator med touchtangentbord. Reglering
regulator Regulatorer Avfrostningsregulatorer Differentialtermostater Multistegsregulatorer R Regulator Regulator 2-Steg R38S Elektronisk panelmonterad 2 stegsregulator med touchtangentbord. Reglering
Matematik och modeller Övningsuppgifter
 Matematik och modeller Övningsuppgifter Beräkna a) d) + 6 b) 7 (+) + ( 9 + ) + 9 e) 8 c) ( + (5 6)) f) + Förenkla följande uttryck så långt som möjligt a) ( ) 5 b) 5 y 6 5y c) y 5 y + y y d) +y y e) (
Matematik och modeller Övningsuppgifter Beräkna a) d) + 6 b) 7 (+) + ( 9 + ) + 9 e) 8 c) ( + (5 6)) f) + Förenkla följande uttryck så långt som möjligt a) ( ) 5 b) 5 y 6 5y c) y 5 y + y y d) +y y e) (
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24-4-22 Sal () TER2,TER3,TERF (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24-4-22 Sal () TER2,TER3,TERF (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
C-10-71. TAC Xenta 3200. Reglerenheter - Värme 2000-02-08 TEKNISKA DATA
 TAC Xenta 3200 Reglerenheter - Värme C-10-71 2000-02-08 TAC Xenta 3200 är en familj av regulatorer, anpassad till små och medelstora applikationer. Ett antal regulatorer kan kopplas samman i ett nätverk.
TAC Xenta 3200 Reglerenheter - Värme C-10-71 2000-02-08 TAC Xenta 3200 är en familj av regulatorer, anpassad till små och medelstora applikationer. Ett antal regulatorer kan kopplas samman i ett nätverk.
1. Inledning. 1. Inledning
 För de flesta människor är ett relativt okänt begrepp trots att var och en i det dagliga livet ständigt kommer i kontakt med och t.o.m. själv utövar. Reglerteknik är varje rationell metod att styra eller
För de flesta människor är ett relativt okänt begrepp trots att var och en i det dagliga livet ständigt kommer i kontakt med och t.o.m. själv utövar. Reglerteknik är varje rationell metod att styra eller
FKP-M. Manual för användning av MODBUS-protokoll. Frabil El AB Telefon: 040-287090 Bjurögatan 38 Fax: 040-184709 211 24 Malmö www.frabil.se. Rev 2.
 FKP-M Manual för användning av MODBUS-protokoll Rev 2.0 Frabil El AB Telefon: 040-287090 Bjurögatan 38 Fax: 040-184709 2 FUNKTION FKP-M Modbus/RTU är kompatibelt med SCADA-system och stödjer alla standardfunktioner.
FKP-M Manual för användning av MODBUS-protokoll Rev 2.0 Frabil El AB Telefon: 040-287090 Bjurögatan 38 Fax: 040-184709 2 FUNKTION FKP-M Modbus/RTU är kompatibelt med SCADA-system och stödjer alla standardfunktioner.
Konsoliderad version av. Styrelsens för ackreditering och teknisk kontroll (SWEDAC) föreskrifter och allmänna råd (STAFS 2006:10) om automatiska vågar
 föreskrifter och allmänna råd (STAFS 2006:10) om automatiska vågar") Konsoliderad version av Styrelsens för ackreditering och teknisk kontroll (SWEDAC) föreskrifter och allmänna råd (STAFS 2006:10) om automatiska vågar Ändring införd t.o.m. STAFS 2011:25 Tillämpningsområde
Konsoliderad version av Styrelsens för ackreditering och teknisk kontroll (SWEDAC) föreskrifter och allmänna råd (STAFS 2006:10) om automatiska vågar Ändring införd t.o.m. STAFS 2011:25 Tillämpningsområde
Reglerteknik, TSIU61. Föreläsning 1
 Reglerteknik, TSIU61 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Formalia 2(20) Hemsida. http://www.control.isy.liu.se/student/tsiu61/ Föreläsnings-oh läggs ut ca en dag i förväg. Till varje
Reglerteknik, TSIU61 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Formalia 2(20) Hemsida. http://www.control.isy.liu.se/student/tsiu61/ Föreläsnings-oh läggs ut ca en dag i förväg. Till varje
Reglerteknik I: F1. Introduktion. Dave Zachariah. Inst. Informationsteknologi, Avd. Systemteknik
 Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars
Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars