729G43 Artificiell intelligens Maskininlärning. Arne Jönsson HCS/IDA
|
|
|
- Mattias Ström
- för 4 år sedan
- Visningar:
Transkript
1 729G43 Artificiell intelligens Maskininlärning Arne Jönsson HCS/IDA
2 Maskininlärning Introduktion Beslutsträdsinlärning Hypotesinlärning Linjär regression Vektorer Perceptroner Artificiella Neurala Nät (ANN)
3 Maskininlärning Naturligt språk Bildingekänning Beslutstöd inom t.ex. sjukvården Autonoma farkoster Detektion Skumma banktransaktioner, cyberattacker, Rekommendationer Produkter, filmer, låtar, Sökmotorer
4 Agent som lär sig Yttre standard/återkoppling Kritiserare Sensorer Återkoppling Utförandeelement Inlärningselement Mål Förändringar Kunskap Omgivning Problemgenerator Agent Effektorer
5 Typer av återkoppling Övervakad inlärning Omgivningen talar direkt om vilken handling som skulle varit korrekt, finns ett facit, en specifik exempelmängd Klassifikation, variabel med ändligt många värden, t.ex. beslutsträd Regression, variabel med oändligt många värden Oövervakad inlärning Ingen återkoppling från omgivningen Klustring, ex Kohonennät, self-organizingmaps (SOM) Förstärkt inlärning (Reinforcement learning) Agenten får bara reda på om det var bra eller dåligt, inte varför eller vilken handling som orsakade detta Q-learning
6 Beslutsträd Skapa en kompakt representation av beslut i en situation beskriven som en mängd egenskaper som påverkar beslutet Ex om man skall vänta vid en restaurang (Russel & Norvig) Attribut: Finns det alternativ i närheten Finns det en bar att vänta i Är det helg Är jag hungrig Finns det kunder i restaurangen Regnar det Vilken typ av restaurang är det etc
7 Restaurangexemplet Ja Alternativ Nej Ja Bar Nej Ja Hungrig Nej Regn Kunder Väntar Väntar inte Nej Ja >60 Väntar inte Väntar Väntar inte Väntar Väntar inte
8 Beslutsträdsinlärning Skapa optimalt beslutsträd ur en exempelmängd Initialisera rotnoden med hela exempelmängden while det finns en nod, N, som kan delas: for each attribut A evaluera delning vid A: använd bästa A för att dela N
9 Exempel
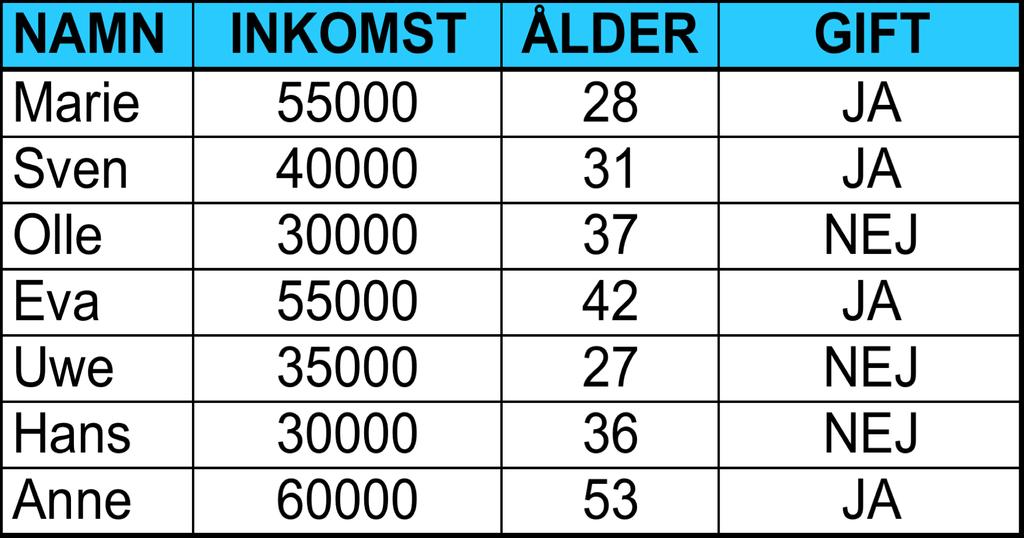
10 Konvertera numeriska data NAMN INKOMST ÅLDER GIFT Marie ³ < 40 JA Sven ³ < 40 JA Olle < < 40 NEJ Eva ³ ³ 40 JA Uwe < < 40 NEJ Hans < < 40 NEJ Anne ³ ³ 40 JA
11 Dela vid ålder < 40 NAMN INKOMST GIFT Marie ³ JA Sven ³ JA Olle < NEJ Uwe < NEJ Hans < NEJ Måste dela igen! NAMN INKOMST ÅLDER GIFT Marie ³ < 40 JA Sven ³ < 40 JA Olle < < 40 NEJ Eva ³ ³ 40 JA Uwe < < 40 NEJ Hans < < 40 NEJ Anne ³ ³ 40 JA ³ 40 NAMN INKOMST GIFT Eva ³ JA Anne ³ JA
12 Dela vid inkomst NAMN INKOMST ÅLDER GIFT Marie ³ < 40 JA Sven ³ < 40 JA Olle < < 40 NEJ Eva ³ ³ 40 JA Uwe < < 40 NEJ Hans < < 40 NEJ Anne ³ ³ 40 JA < NAMN ÅLDER GIFT Olle < 40 NEJ Uwe < 40 NEJ Hans < 40 NEJ ³ NAMN ÅLDER GIFT Marie < 40 JA Sven < 40 JA Eva ³ 40 JA Anne ³ 40 JA
13 Information Hur välja attribut att dela trädet? Ofta används informationsmått Information innebär minskad osäkerhet Exempel Om man i ett varuhus frågar var skivavdelningen finns och får veta att det finns på våning 1, får man mer information om det finns 6 våningar än om det finns 2 och ingen information om det bara finns en våning. Utfallet av en händelse med flera lika sannolika möjligheter ger mer information än utfallet av en händelse med färre lika sannolika möjligheter
14 Välja bästa attribut Använd förväntad mängd information som återstår vid ett attribut Bit information den mängd information som behövs Informationsteori: en bit information ger ett ja/nej svar på en fråga Definition, entropi (Shannon) I ( P( v ) ( )) å 1,!, P vn = - P( vi ) log 2 P( vi ) Eftersom P(v i ) 1 blir log2(p(v i )) negativ, därför minus n i= 1
15 Exempel Musikavdelningen i varuhus med två lika sannolika våningar I(½,½) = -½log 2 (½) - ½log 2 (½) = -log 2 (½) = -(log 2 (1)- log 2 (2)) = 1 8 lika sannolika våningar I(⅛,..,⅛) = -⅛log 2 (⅛) - -⅛log 2 (⅛) = -log 2 (⅛) = log 2 (8) = 3 Jämför vanlig datarepresentation. Det behövs tre bit för att representera 8 olika alternativ
16 Entropi för attribut A Låt: n b, antal instanser i gren b n bc, antal instanser i gren b av klass c n t, totala antalet instanser i alla grenar n é ù å b n êå bc nbc - log ( ú û E ( A) = 2 ) b nt ë c nb nb Exempel n ålder<40 =5 n ålder<40, class=gift =2 n t = 7 < 40 NAMN INKOMST GIFT Marie ³ JA Sven ³ JA Olle < NEJ Uwe < NEJ Hans < NEJ NAMN INKOMST ÅLDER GIFT Marie ³ < 40 JA Sven ³ < 40 JA Olle < < 40 NEJ Eva ³ ³ 40 JA Uwe < < 40 NEJ Hans < < 40 NEJ Anne ³ ³ 40 JA ³ 40 NAMN INKOMST GIFT Eva ³ JA Anne ³ JA
17 Informationsvinst (ID3/C4.5) Den information som man vinner om man går ner i gren A Vinst ( A) = I( Output ) - E( A) Välj det attribut som ger högst vinst
18 Starttillstånd 4/7 är gifta 3/7 är ogifta I( Output) = - log - log = 0,985
19 Ålder 5 är < 40 2 gifta; 3 ogifta < 40 NAMN INKOMST GIFT Marie ³ JA Sven ³ JA Olle < NEJ Uwe < NEJ Hans < NEJ NAMN INKOMST ÅLDER GIFT Marie ³ < 40 JA Sven ³ < 40 JA Olle < < 40 NEJ Eva ³ ³ 40 JA Uwe < < 40 NEJ Hans < < 40 NEJ Anne ³ ³ 40 JA ³ 40 NAMN INKOMST GIFT Eva ³ JA Anne ³ JA I( < 40) = - log - log = 0,971 2 är 40 alla gifta 2 2 I( ³ 40) = - log2 = 2 2 0
20 Ålder, forts. Entropi 5 7 0, = 0,693 Vinst(Ålder)=0,985-0,693=0,292
21 Inkomst 3 har < alla ogifta I=0 4 har ³ alla gifta I=0 Entropi 0 Vinst(Inkomst)=0,985-0=0,985 NAMN INKOMST ÅLDER GIFT Marie ³ < 40 JA Sven ³ < 40 JA Olle < < 40 NEJ Eva ³ ³ 40 JA Uwe < < 40 NEJ Hans < < 40 NEJ Anne ³ ³ 40 JA < NAMN ÅLDER GIFT Olle < 40 NEJ Uwe < 40 NEJ Hans < 40 NEJ ³ NAMN ÅLDER GIFT Marie < 40 JA Sven < 40 JA Eva ³ 40 JA Anne ³ 40 JA
22 Restuarangexemplet, träningsexempel Exempel Attribut Mål Väntar Alt Bar Helg Hunger Kunder V-tid Regn Bokat Typ X1 Ja Nej Nej Ja Några 0-10 Nej Ja Fransk Ja X2 Ja Nej Nej Ja Full Nej Nej Thai Nej X3 Nej Ja Nej Nej Några 0-10 Nej Nej Kina Ja X4 Ja Nej Ja Ja Full Nej Nej Thai Ja X5 Ja Nej Ja Nej Full >60 Nej Ja Fransk Nej X6 Nej Ja Nej Ja Några 0-10 Ja Ja Pizza Ja X7 Nej Ja Nej Nej Ingen 0-10 Ja Nej Kina Nej X8 Nej Nej Nej Ja Några 0-10 Ja Ja Thai Ja X9 Nej Ja Ja Nej Full >60 Ja Nej Kina Nej X10 Ja Ja Ja Ja Full Nej Ja Pizza Nej
23 Beslutsträd Några KUNDER Full Ingen + x1, x3, x6, x8 - JA Ja + x4 - x2, x5, x9, x10 HUNGRIG Nej + - x7 NEJ Fransk Default + - x10 NEJ Pizza + x4 - x2, x10 TYP + x4 - JA Kina Default Thai Ja + x4 - x2 HELG Nej + - x5, x9 + NEJ - x2 NEJ
24 Resultat Beslutsträdet använder inte alla attribut Kan ha funnit okända samband mellan attribut Om det saknas exempel för ett visst attributvärde så spelar det ingen roll. Returnera något defaultvärde Om det saknas attribut i en gren där det inte finns ett beslut så saknas det information och fler attribut behövs såvida det inte är fel eller icke-deterministiskt
25 Hypotesinlärning Från specifika exempel till generell beskrivning Presenterar såväl positiva som negativa exempel Positivt exempel som inte matchar leder till en generalisering av modellen (false negativ) Negativt exempel som matchar ger en specificering av modellen (false positiv)
26 Hypotesinlärning def currentbestlearning(exempel): h = hypotes konsistent med första exemplet for each e in exempel: if e false positiv: specialisera h så att h konsistent med alla tidigare exempel if e false negativ: generalisera h så att h konsistent med alla tidigare exempel if ingen konsistent specialisering/generalisering: return Fail
27 Exempel, Winston Positivt exempel B båge ISPART ISPART ISPART över A B C under över under A C ISA vänster-om höger-om ISA ISA block
28 Generalisering Nytt positivt exempel B ISPART över båge ISPART A B C under ISPART vänster-om höger-om över under ISA A C ISA triangel ISA båge block ISPART ISPART ISPART A över under ISA B över under vänster-om höger-om ISA ISA C generalisera triangel polygon block block
29 Specificering Negativt exempel B båge ISPART ISPART ISPART över A B C under över under A C ISA vänster-om höger-om ISA ISA polygon Stärk modellen med en ny länk får-inte-röra-vid
30 Version Spaces Hypotesinlärning à la Winston måste hålla reda på alla positiva och negativa exempel Versions Spaces Hittar både den mest specifika och den mest generella beskrivning som täcker alla positiva exempel och inget negativt Arbetar med två hypotesmängder: S: de mest specifika hypoteser som täcker alla positiva exempel och inget negativt G: de mest generella hypoteser som täcker alla positiva exempel och inget negativt
31 Version spaces G: mest specifika generaliseringen Tolkningsrymd S: mest generella specificeringen
32 Version Space-algoritmen Om positivt exempel p: Ta bort de hypoteser ur G som ej matchar p. Ersätt alla hypoteser i S som ej matchar p med de mest specifika generaliseringar som: matchar p är mer specifika än någon hypotes i G inte är mer generell än någon hypotes i S Om negativt exempel n: Ta bort de hypoteser ur S som matchar n. Ersätt alla hypoteser i G som matchar n med de mest generella specialiseringar som: inte matchar n är mer generella än någon hypotes i S inte är mer specifik än någon hypotes i G
33 Exempel Bar Typ Väntetid Väntar X1 Ja Kina <10 Ja X2 Ja Thai 10 Nej X3 Ja Thai <10 Ja X4 Nej Fransk <10 Ja +X1 G: {(?,?,?)} -X2 False negativ, specialisera G: {(?, Kina,?) (?,?, <10)} +X3 False positiv, hypotes bort G: {(?,?, <10)} +X4 Matchar G: {(?,?, <10)} +X4 False positiv, generalisera S: {(?,?, <10)} +X3 False positiv, generalisera S: {(Ja,?, <10)} -X2 Matchar inte, S oförändrad S:{(Ja, Kina, <10)} +X1 S: {(Ja, Kina, <10)}
34 Linjär regression Hitta den linje som bäst beskriver en datamängd Modellantagande; sambandet kan beskrivas med en rät linje h(x)= w 1 x+w 0 där w 1 anger lutningen och w 0 förskjutningen från origo Jämför avvikelsen mot linjen i varje punkt och minimera felet h(x) x
35 Exempel Ålder Lön Lön Ålder
36 Vad mäter felfunktionen w 0 =0 w 1 =0,5 h " = 0,5" h(x) 3,5 3 2,5 2 1,5 1 0,5 Felet 0 0 0,5 1 1,5 2 2,5 3 3,5 x
37 Felfunktioner Finns flera sätt att räkna ut felet mellan riktiga värdet, t och erhållna värdet h(x) Absolutvärdet, L1: % "#$ ' " h * " Kvadratfelet, L2: % "#$ (' " h * " ) - Värsta fallet: max " ' " h * " Vanligast är kvadratfelet Stora fel betraktas som värre än små, negativa fel kan inte ta ut positiva Vill ändra koefficienterna, vikterna, w i i ekvationen h(x)=w 1 x+w 0 så att felet minimeras
38 Felfunktionen för L2 Inför,! w #, w % = 1 ( ) *+% (. * h 1 * ) 3 där. * är korrekt värde och h 1 * = 4 % 1 * + 4 # Vi vill justera parametrarna w 0 och w 1 så att felet blir så litet som möjligt Vanlig metod är gradientsökning
39 Gradientsökning, intuition J(w) J(w) w = w - stort värde w w = w + litet värde w
40 Gradientsökning Steg 0: Börja med e1 godtyckligt värde för w. Steg 1: Räkna ut felfunk<onens tangent i den punkt som motsvarar den aktuella modellparametern w. Steg 2: Gå i motsa1 riktning av tangenten: Om tangenten har posi<v lutning, minska värdet på w. Om tangenten har nega<v lutning, höj värdet på w. Detalj: Lutningen mul<pliceras med en steglängdsfaktor. Upprepa steg 1 2 <lls felet blir <llräckligt litet.
41 Gradienten Minimera felet genom att söka i gradientens riktning Derivatan ger gradienten, riktningen ' Derivera! " #, " % = % ' )*%(, ) h / ) ) 1 med avseende på w 1 och w 0 där h / ) = " % / ) + " # Dvs räkna ut 23(4 5) 24 5 och 23(4 6) (4 5 ) = % 24 5 ' )*% ' 2(, ) h / ) ) 23(4 6 ) = % 24 6 ' )*% ' 2/ ) (, ) h / ) )
42 Parameteruppdatering! " =! " + % &'() *) &) * Steglängdsfaktorn % Med partialderivatorna (2 inbakad i %)!, =!, + % -. "0-. (1 " h 4 " )! - =! - + % -. "0-. 4 " (1 " h 4 " )
43 Exempel! = 0,1, w 0 = 0 och w 1 varierar, dvs h(x) = w 1 x. Ini5alt w 1 = 0,5 " # = " # + 0,1 # ) +,# ) - + (/ + w ) 3,5 3 2,5 2 1,5 1 0,
44 Exempel! = 0,1, w 0 = 0 och w 1 varierar, dvs h(x) = w 1 x. Initialt w 1 = 0,5 3,5 3 2,5 2 1,5 1 0, " # = " # + 0,1 # ) +,# ) - + (/ + w ) " # = 0,5 + 0,1 # 3 0,5+0,1 7,89:9;,8 3 ( 1 0,5 + 2(2 1)+3(3-1,5))= = 0,5 +0,233=0,733
45 Exempel! = 0,1, w 0 = 0 och w 1 varierar, dvs h(x) = w 1 x. Ini;alt w 1 = 0,5 " # = " # + 0,1 # ) +,# ) - + (/ + w ) 3,5 3 2,5 2 1,5 1 0, " # = 0,5 + 0,1 # 3 0,5+0,1 7,89:9;,8 3 ( 1 0,5 + 2(2 1)+3(3-1,5))= = 0,5 +0,233=0,733
46 Exempel! = 0,1, w 0 = 0 och w 1 varierar, dvs h(x) = w 1 x. Initialt w 1 = 0,5 3,5 3 2,5 2 1,5 1 0, " # = " # + 0,1 # ) +,# ) - + (/ + " ) " # = 0,5 + 0,1 # 2 0,5+0,1 6,7898:,7 2 ( 1 0,5 + 2(2 1)+3(3-1,5))= = 0,5 +0,233=0,733 " # = 0, ,1 # ( 1 0, (2 1,467)+3(3-2 2,199))= 0,733+0,1 6,9?@8#,6??89,:62 = 2 0,733 +0,124=0,857 etc
47 Gradientsökning J(w 1 ) J(w 1 ) w 1 Iteration 1: w 1 = 0,5 + 0,233 w 1 Itera2on 2: w 1 = 0, ,124
48 Några grundläggande begrepp Guldstandard Datamängd med indata, x och motsvarande korrekta målvärde, t Träning Visa upp alla x och t och låt systemet lära sig Testning Testa en modell genom att visa upp x och jämföra modellens predicerade utvärde med målvärdet t Träningsfel Fel hos modellen vid träning Generaliseringsfel Hur mycket fel modellen gör på okända data. Uppskattas utifrån testfelet, dvs fel på testdata
49 Underfitting och overfitting Underfitting Modellen räcker inte för att få ett lågt felvärde på träningsmängden. Den är ännu sämre på testmängden Overfitting Modellen överoptimerad på träningsdata. Lågt felvärde på träningsdata men högt på testdata. Lämplig modell Underfi?ng Overfitting
50 Regularisering Används för att undvika overfitting, undvika att koefficienterna blir för bra Förändra inlärningsalgoritmen så att generaliseringsfelet minskar utan att träningsfelet blir mindre Exempel: L2-regularisering. Lägg till en extra term till felfunktionen som blir större ju större vikterna är Låt funktionen fokusera på det generella inte det extrema
51 Multipel linjär regression Generalisera gradientsökning till flera särdrag, x, och parametrar, w h " #,, " & = ( w ) " ) & )*# Har infört x 0 = 1 för att snygga till ekvationen Sambandet mellan indata och utdata blir nu ett hyperplan

52 Multipel linjär regression Exempel Ålder Anst. tid Lön Lön Anst. tid 60
53 Vektorer Sammanfa,a särdrag och parametrar i vektorer, vektorer skrivs o8a med fet s9l, x, och, w h " = $ % " (matrisnota9on), * jämför h & ',, & * =,-' w, &, Skalär E, tal T.ex. längd (2m), 9d (12:30), temperatur (170K) Vektor Riktning och längd, t.ex. has9ghet, kra8



54 Några vektorsamband Likhet Lika lång och med samma riktning men inte nödvändigtvis samma startpunkt Addition u u+v v Multiplikation v -v 2v

55 Punkter och vektorer y y b (a,b) b (a,b,c) z c a x a x Vektorer kan identifieras som punkter (a,b), (a,b,c) Egentligen ortsvektorer men vi kan parallellförflytta Kan generalisera till vilken dimension som helst (w 0,w 1,, w n )
56 Vektoroperationer Antag z = (a 1, b 1,c 1 ) och w = (a 2, b 2,c 2 ) Addi1on z + w = (a 1, b 1,c 1 ) + (a 2,b 2,c 2 ) = (a 1 +a 2, b 1 +b 2, c 1 +c 2 ) Ex u =(1,2), v=(1,0) u + v = (2,2) 2 1 u v Mul1plika1on med skalär 2u = 2(a,b,c) = (2a,2b,2c) 1 2 x
57 Matriser Vektorer multipliceras med skalärprodukt (eller kryssprodukt) Matriser är rektangulära scheman av tal Exempel A = och B = A är en 2 3-matris med 2 rader och 3 kolumner med elementen a 11 =1, a 12 =3, a 13 =4, a 21 =-3, a 22 =2, a 23 =0 B är en 3 2-matris Matriser multipliceras annorlunda
58 Matrismultiplikation Matrisen C=AB fås genom att multiplicera raden i A med kolumnen i B! "# = ) &'( * "& + &# Om A en n m-matris måste B vara m k och C bli n k Exempel A = och B = = =
59 Matrismultiplikation,2 Matriser kan transponeras Exempel A = )* = h, = - *, antag. = w 0 w 1 w 2 h, = - *, = w 0 w = w 2 w = w w w
60 Skalärprodukt Produkten av två vektorer resulterar i en skalär, dvs ett tal u v (Kallas dot product på engelska) Antag u = (u 1, u 2,u 3 ) och v = (v 1, v 2,v 3 ) då definieras u v som u v = u 1 v 1 + u 2 v 2 + u 3 v 3 Skalärprodukten innehåller information om både vektorns längd och riktning Speciellt är u u = u 1 u 1 + u 2 u 2 + u 3 u 3 = u u u 3 2
61 Skalärprodukt Längden av vektorn v = (a,b) betecknas v kan beräknas med Pythagoras sats som v = " # + % # y Skalärprodukten v v = aa+bb = a 2 + b 2 v v = v 2 dvs v = ' ' Två vektorer u och v med vinkeln ( mellan Geometrisk definition av skalärprodukt v u = v u cos(() b v v ( (a,b) a u x
62 Multipel linjär regression h " = $ % " Parametervektor w som skall uppdateras I flera dimensioner blir gradienten den vektor som innehåller alla lutningar, en lutning per dimension Jämför & ' = & ' + ) *+(-.) *-. där vi bara tittade på w 1 Flera parametrar 0J($) = * *- 2 * *- 3 * *- 4 Parameteruppdatering $ = $ + ) 0J($)
63 Binär klassificering Avgöra vilken klass ett element tillhör Vill dra en rät linje som på bästa sätt delar exemplen Kombinera linjär regression med en tröskelfunktion f(x) h " = $(& ' ")
64 Tröskelfunktion T.ex.! " = $%&' " = ( 1 *+ " 0 0.//.0$ dvs f(x)=1 om x posi5v Perecptroninlärning -1-0,5 0 0,5 1
65 Neurala nätverk Neuroner och neurala nätverk Perceptroner Nätverk Inlärning med återkoppling
66 Neuron Cellkropp Axon Dendriter Synaps
67 Perceptron x 0 = t x 1 x 2 w 0 w 1 w 2 S... h(x) x j w j h(#) = &'()(* / ). +,- h # = 1(2 3 4) 1 0 = &'() 0 = ;<<;=&
68 Booleska funktioner Genom att manipulera tröskelvärdet kan man få godtycklig boolesk funktion, ex 3 ingångar med: x 0 = t = 1, w 0 = -1,5, w 1 = w 2 = 1 ger h(x)=steg(-1,5 + x 1 + x 2 ) Dvs logiskt OCH x 1 x 2 h(x) x 0 = t = 1, w 0 = -0,5, w 1 = w 2 = 1 ger h(x)=steg(-0,5 + x 1 + x 2 ) Dvs logiskt ELLER x 1 x 2 h(x)
69 Inlärning av perceptroner Perceptroninlärning För varje särdragsvektor och målvärde i träningsmängden 1. Beräkna h(x) 2. Uppdatera parametervektorn w = w +!(t - h(x))x Upprepa tills klassifikationsfelet tillräckligt litet
70 Exempel Träningsdata x 1 x 2 t 1,0 1,0 1 9,4 6,4-1 2,5 2,1 1 8,0 7,7-1 0,5 2,2 1 7,9 8,4-1 7,0 7,0-1 2,8 0,8 1 1,2 3,0 1 7,8 6,1-1 x 0 = t x 1 x 2 w 0 w 1 w 2 h # = % & ' ( Antag att vi startar med vikterna: w 0 = -0,6, w 1 = 0,75, w 2 = 0,5 x 0 =1 Första input ger då: h(x)=f(-0,6+1,0 0,75+1,0 0,5)=1 Felet blir 1-1=0 S f % ) = * 1,- ) 0 1,- ) < 0 så ingen uppdatering av vikter h(x)
71 Exempel w = w +!(t - h(x))x!=0,2 x 1 x 2 t w t 0 w t 1 w t 2 h(x) Fel w t+1 0 w t+1 1 w t+1 2 1,0 1,0 1-0,6 0,75 0, ,6 0,75 0,5 9,4 6,4-1 -0,6 0,75 0, ,01-2,06 2,5 2, ,01-2, ,6-2,01-1,22 8 7,7-1 -0,6-2,01-1, ,6-2,01-1,22 0,5 2,2 1-0,6-2,01-1, ,2-1,81-0,34 7,9 8,4-1 -0,2-1,81-0, ,2-1,81-0, ,2-1,81-0, ,2-1,81-0,34 2,8 0,8 1-0,2-1,81-0, ,2-0,69-0,02 1, ,2-0,69-0, ,6-0,21 1,18 7,8 6,1-1 0,6-0,21 1, ,2-3,33-1,26
72 Resultat, exempel Efter 500 iterationer med samma träningsmängd konvergerar vikterna w 0 = 10,9, w 1 = -1,3, w 2 = -1,1 Vi får en beslutslinje om vi sätter h(x)=0, dvs 0 =10,9 1,3x 1 1,1 x 2 dvs 9 x 2 t = - 1 x 1 = 0,85x 2 + 8,38 Ex. x 2 = 9 ger x 1 = 0, x 2 = 0 ger x 1 =8,4 3 2 t = x 1
73 Andra aktiveringsfunktioner Aktiveringsfunktion för nätet: h " = $ % & ' Stegfunktionen m.fl. liknande diskreta funktioner ger oberäkneligt inlärningsbeteende. Vill ha en kontinuerlig, deriverbar, funktion. Ex. sigmoid (även kallad logistiska funktionen): f(x) f ) = 1 1 +, -. 1 För nätet får vi då: 1 h ' = 1 +, -%/ ' x
74 Gradientsökning Uppdateringsfunktion, jämför multipel linjär regression ( = ( + 3 4J ( * Med kvadratfelsfunktionen (L2) 6 ( = (7 h * ), och sigmoidfunktionen 1 h * = () * Dvs vi vill partialderivera(" $ $%& '() * ), för varje w i
75 Derivering av felfunktionen Några deriveringsregler Kedjeregeln!(# %)!'!(, -. ) = 0 1'!' =!(# %)!%!%!' alternativt (f(g)) =f (g)g 5 61!( 2. ) = 3!' ' : ; 4 5< = = ?, -9: ; : ; 5< = : ; = 0 19: ; 3 = 5< = (3?, -9:; 019:; h(;) B
76 Derivering av felfunktionen, 2! "# h * = $ $%& '() * +!, - = 2 " $ '() * 4 #()* h(*) '() * 4#()* = 1 1 : * +! "# $%& '() * = 2 " h *!, - 2 " h * 1 h * h * 1 : * 1 h * 8 = Viktuppdatering < = = < = +? " h * 1 h * h =
77 Linjärt separerbara problem Booleska funktionerna OCH och ELLER linjärt separerbara Exlusivt ELLER (XOR) X 2 x 1 x 2 y Finns ingen linje som separerar Problem för perceptroner 1 X 1
78 Neurala nät XOR x 0 = -1 x 1 x 2 1,5 1 S z x 0 = ,5 1 S h(x) 1 x 1 x 2 t z = -1,5 + x 1 + x 2 h(x) = -0,5-2z + x 1 + x ,5+0+0=-1,5 0-0, =-0, ,5+0+1=-0,5 0-0, =0, ,5+1+0=-0,5 0-0, =0, ,5+1+1=0,5 1-0, =-0,5 0
79 Nätverk t 1 t i y y i w ji h h j w kj x x k
80 Neurala nät Nätverkstopologin Hur många dolda lager och hur många noder i varje lager Aktiveringsfunktion Sigmoid, tanh,. Olika funktioner i olika lager Inlärning Problem att räkna ut felet för mellanlagret Finns ingen metod som garanterar optimalitet Gradient backpropagation vanlig metod Undvika överinlärning
81 Gradient backpropagation Viktuppdatering för utdatalagret, y Samma som för perceptronen (sigmoid), med utdata från dolda lagret, h, som indata! =! + $ % ' 1 ' ' * Felet från noder i dolda lagret antas bero av det fel som noden givit upphov till i lagret efter +!. - / = w 1m w 2m h m E wkm x 1 x 2 x k
82 Gradient backpropagation 1. Initialisera vikterna slumpmässigt 2. Upprepa tills resultatet tillfredställande: Applicera en indatavektor x (förväntat resultat t) Aktivera nätverket, utdata y Räkna ut felet för utdatalagret: D i = (t i y i ) (1- y i ) y i Uppdatera vikterna i utdatalagret: w ji := w ji + ad i h j där a är en förstärkningsfaktor < 1 Räkna ut felet för dolda lagret: D j = S i (w ji D i ) (1- h j ) h j Uppdatera vikterna i dolda lagret: w kj := w kj + ad j x k Två sista stegen upprepas om flera lager

83 Förbättringar Bä,re ak0veringsfunk0oner med starkare gradienter Regularisering Skapa nya datamängder genom a, transformera befintlig Ex rotera och skala bilder Dropouts Slå ut slumpvisa delar av nätet. Kan förhindra a, nätet blir överkänsligt för säregenheter hos datamängden. Återkoppla näten RNN, LSTM h t h 0 h 1 = h t x t x 0 x 1 x t
84 Support Vector Machines (SVM) Vanlig klassificeringsmetod med många färdiga bibliotek att använda (Weka) Väljer att separera för att få bästa möjliga generalisering Linjär regression väljer utifrån alla punkter SVM identifierar några punkter som viktigare, support vectors Väljer linjen som maximerar avståndet till alla dessa Support vectors x 1
85 The Kernel trick Ibland går det inte a4 dela linjärt Transformera ;ll högre dimension: x F(x) Ex f 1 = x 2 1, f 2 = x 2 2, f 3 = 2x 1 x 2 x 1 f 3 x 2 f 2 f 1
86 Sammanfattning Agent som lär sig Typer av återkoppling: övervakad, oövervakad, förstärkt inlärning Beslutsträdsinlärning Val av attribut, informationsmått, entropi Hypotesinlärning Version Space Linjär regression Felfunktioner Gradientsökning Grundläggande begrepp Guldstandard, träning, teseng, träningsfel, generaliseringsfel MulEpel linjär regression Vektorer, vektoroperaeoner, matriser, skalärprodukt Neurala nät SVM Perecptroner Inlärning av perceptroner Gradientsökning Nätverk av perceptroner Gradient backpropagaeon
Agent som lär sig. Maskininlärning. Genetiska algoritmer. Typer av återkoppling. ! Introduktion. ! Genetiska algoritmer!
 Maskininlärning gent som lär sig! Introduktion Yttre standard/återkoppling! Genetiska algoritmer! Exempelinlärning! eslutsträdsinlärning! Version Space-inlärning Återkoppling Kritiserare Mål Inlärningselement
Maskininlärning gent som lär sig! Introduktion Yttre standard/återkoppling! Genetiska algoritmer! Exempelinlärning! eslutsträdsinlärning! Version Space-inlärning Återkoppling Kritiserare Mål Inlärningselement
729G43 Artificiell intelligens / Maskininlärning 2. Marco Kuhlmann
 729G43 Artificiell intelligens / 2015 Maskininlärning 2 Marco Kuhlmann Förra gången: Linjär regression Gradientsökning Vandra ner i felets dal. Steg 0: Börja med ett godtyckligt värde för θ. Steg 1: Räkna
729G43 Artificiell intelligens / 2015 Maskininlärning 2 Marco Kuhlmann Förra gången: Linjär regression Gradientsökning Vandra ner i felets dal. Steg 0: Börja med ett godtyckligt värde för θ. Steg 1: Räkna
729G43 Artificiell intelligens (2016) Maskininlärning 2. Marco Kuhlmann Institutionen för datavetenskap
 Maskininlärning 2. Marco Kuhlmann Institutionen för datavetenskap") 729G43 Artificiell intelligens (2016) Maskininlärning 2 Marco Kuhlmann Institutionen för datavetenskap Förra gången: Gradientsökning tangentens lutning i punkt θ steglängdsfaktor Översikt Introduktion
729G43 Artificiell intelligens (2016) Maskininlärning 2 Marco Kuhlmann Institutionen för datavetenskap Förra gången: Gradientsökning tangentens lutning i punkt θ steglängdsfaktor Översikt Introduktion
729G43 Artificiell intelligens (2016) Maskininlärning 3. Marco Kuhlmann Institutionen för datavetenskap
 Maskininlärning 3. Marco Kuhlmann Institutionen för datavetenskap") 729G43 Artificiell intelligens (2016) Maskininlärning 3 Marco Kuhlmann Institutionen för datavetenskap Modell med vektornotation parametervektor särdragsvektor Perceptron kombinerar linjär regression med
729G43 Artificiell intelligens (2016) Maskininlärning 3 Marco Kuhlmann Institutionen för datavetenskap Modell med vektornotation parametervektor särdragsvektor Perceptron kombinerar linjär regression med
729G43 Artificiell intelligens / Maskininlärning 3. Marco Kuhlmann
 729G43 Artificiell intelligens / 2015 Maskininlärning 3 Marco Kuhlmann Förra gången: Perceptroninlärning Beslutsregel predicerat y-värde Exempel: AND Välj parametrar θ 0, θ 1, θ 2 sådana att perceptronen
729G43 Artificiell intelligens / 2015 Maskininlärning 3 Marco Kuhlmann Förra gången: Perceptroninlärning Beslutsregel predicerat y-värde Exempel: AND Välj parametrar θ 0, θ 1, θ 2 sådana att perceptronen
ARTIFICIELLA NEURALA NÄT. MARCO KUHLMANN Institutionen för datavetenskap
 ARTIFICIELLA NEURALA NÄT MARCO KUHLMANN Institutionen för datavetenskap Example Alt Bar Fri Hun Pat Price Rain Res Type Est WillWait 1 Yes No No Yes Some $$$ No Yes French 0 10 Yes 2 Yes No No Yes Full
ARTIFICIELLA NEURALA NÄT MARCO KUHLMANN Institutionen för datavetenskap Example Alt Bar Fri Hun Pat Price Rain Res Type Est WillWait 1 Yes No No Yes Some $$$ No Yes French 0 10 Yes 2 Yes No No Yes Full
729G43 Artificiell intelligens (2016) Maskininlärning 1. Marco Kuhlmann Institutionen för datavetenskap
 Maskininlärning 1. Marco Kuhlmann Institutionen för datavetenskap") 729G43 Artificiell intelligens (2016) Maskininlärning 1 Marco Kuhlmann Institutionen för datavetenskap Introduktion Maskininlärning Tack vare maskininlärning kan AI-system idag bl.a. producera och förstå
729G43 Artificiell intelligens (2016) Maskininlärning 1 Marco Kuhlmann Institutionen för datavetenskap Introduktion Maskininlärning Tack vare maskininlärning kan AI-system idag bl.a. producera och förstå
I en deterministisk omgivning beror nästa tillstånd bara av agentens handling och nuvarande tillstånd.
 OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
729G43 Artificiell intelligens / Maskininlärning 1. Marco Kuhlmann
 729G43 Artificiell intelligens / 2015 Maskininlärning 1 Marco Kuhlmann Introduktion Maskininlärning Tack vare maskininlärning kan AI-system idag bl.a. producera och förstå naturligt språk kontrollera maskiner,
729G43 Artificiell intelligens / 2015 Maskininlärning 1 Marco Kuhlmann Introduktion Maskininlärning Tack vare maskininlärning kan AI-system idag bl.a. producera och förstå naturligt språk kontrollera maskiner,
I en deterministisk omgivning beror nästa tillstånd bara av agentens handling och nuvarande tillstånd.
 OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
Linköpings universitet
 Översikt Kognitionsvetenskaplig introduktionskurs Föreläsning 4 Informationsbearbetningsmodeller Vad är kognitionsvetenskap? Kort bakgrund/historik Representation och bearbetning av information Vetenskapliga
Översikt Kognitionsvetenskaplig introduktionskurs Föreläsning 4 Informationsbearbetningsmodeller Vad är kognitionsvetenskap? Kort bakgrund/historik Representation och bearbetning av information Vetenskapliga
Artificiella Neuronnät
 Artificiella Neuronnät 2 3 4 2 (ANN) Inspirerade av hur nervsystemet fungerar Parallell bearbetning Vi begränsar oss här till en typ av ANN: Framåtkopplade nät med lagerstruktur 3 4 Fungerar i princip
Artificiella Neuronnät 2 3 4 2 (ANN) Inspirerade av hur nervsystemet fungerar Parallell bearbetning Vi begränsar oss här till en typ av ANN: Framåtkopplade nät med lagerstruktur 3 4 Fungerar i princip
de var svåra att implementera och var väldigt ineffektiva.
 OBS! För flervalsfrågorna gäller att flera alternativ eller inget alternativ kan vara korrekt. På flervalsfrågorna kan man bara ha rätt eller fel, dvs frågan måste vara helt korrekt besvarad. Totalt kan
OBS! För flervalsfrågorna gäller att flera alternativ eller inget alternativ kan vara korrekt. På flervalsfrågorna kan man bara ha rätt eller fel, dvs frågan måste vara helt korrekt besvarad. Totalt kan
Enlagersnät Flerlagersnät Generalisering. Artificiella Neuronnät
 Artificiella Neuronnät 1 Karaktäristiska egenskaper Användningsområden Klassiska exempel Biologisk bakgrund 2 Begränsningar Träning av enlagersnät 3 Möjliga avbildningar Backprop algoritmen Praktiska problem
Artificiella Neuronnät 1 Karaktäristiska egenskaper Användningsområden Klassiska exempel Biologisk bakgrund 2 Begränsningar Träning av enlagersnät 3 Möjliga avbildningar Backprop algoritmen Praktiska problem
Fråga 5 (1 poäng) För att definiera ett sökproblem krävs...
 För att definiera ett sökproblem krävs...") OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervarlsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervarlsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
Neurala nätverk och språkigenkänning. Henrik Linnarsson. Linköping University
 Neurala nätverk och språk Henli807!1 Neurala nätverk och språkigenkänning Henrik Linnarsson Linköping University Neurala nätverk och språk Henli807!2 RNN, LSTM och språkigenkänning Inledning Idag är språkigenkänning
Neurala nätverk och språk Henli807!1 Neurala nätverk och språkigenkänning Henrik Linnarsson Linköping University Neurala nätverk och språk Henli807!2 RNN, LSTM och språkigenkänning Inledning Idag är språkigenkänning
Fråga 5 (1 poäng) För att definiera ett sökproblem krävs...
 För att definiera ett sökproblem krävs...") OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervarlsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervarlsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
HKGBB0, Artificiell intelligens
 HKGBB0, Artificiell intelligens Kortfattade lösningsförslag till tentan 3 november 2005 Arne Jönsson 1. Vad karaktäriserar dagens AI-forskning jämfört med den AI-forskning som bedrevs perioden 1960-1985.
HKGBB0, Artificiell intelligens Kortfattade lösningsförslag till tentan 3 november 2005 Arne Jönsson 1. Vad karaktäriserar dagens AI-forskning jämfört med den AI-forskning som bedrevs perioden 1960-1985.
2D Potentialen i en nervcell definieras normalt som skillnaden i spänning mellan dess axon och dendrit.
 2D1432 Artificiella Neuronnät och andra lärande system Lösningsförslag till Tentamen 2003-03-06 Inga hjälpmedel. Uppgift 1 Vilka av följande påståenden är sanna? Korrigera de som är fel. 1. Potentialen
2D1432 Artificiella Neuronnät och andra lärande system Lösningsförslag till Tentamen 2003-03-06 Inga hjälpmedel. Uppgift 1 Vilka av följande påståenden är sanna? Korrigera de som är fel. 1. Potentialen
Antag att b är förgreningsfaktorn, d sökdjupet, T (d) tidskomplexiteten och M(d) minneskomplexiteten.
 tidskomplexiteten och M(d) minneskomplexiteten.") OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
Att programmera en Beethoven
 Linköpings universitet Att programmera en Beethoven Fördjupning inom Neurala nätverk och LSTM 2018-01-03 Innehåll 1 Inledning- Musik och artificiell intelligens... 2 1.1 Historia... 2 1.2 Bakgrund AIVA...
Linköpings universitet Att programmera en Beethoven Fördjupning inom Neurala nätverk och LSTM 2018-01-03 Innehåll 1 Inledning- Musik och artificiell intelligens... 2 1.1 Historia... 2 1.2 Bakgrund AIVA...
Asymptotisk analys innebär att... man försöker uppskatta vad som händer för stora indatamängder.
 OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervarlsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervarlsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
MATEMATIK GU. LLMA60 MATEMATIK FÖR LÄRARE, GYMNASIET Analys, ht 2014. Block 5, översikt
 MATEMATIK GU H4 LLMA6 MATEMATIK FÖR LÄRARE, GYMNASIET Analys, ht 24 I block 5 ingår följande avsnitt i Stewart: Kapitel 2, utom avsnitt 2.4 och 2.6; kapitel 4. Block 5, översikt Första delen av block 5
MATEMATIK GU H4 LLMA6 MATEMATIK FÖR LÄRARE, GYMNASIET Analys, ht 24 I block 5 ingår följande avsnitt i Stewart: Kapitel 2, utom avsnitt 2.4 och 2.6; kapitel 4. Block 5, översikt Första delen av block 5
Vektorer, matriser, nätverk - några elementa
 Vektorer, matriser, nätverk - några elementa Innehåll: Vektorer Radvektorer och kolumnvektorer Operationer med vektorer Input- och outputvektorer i neurala nätverk Utvikning om kompetitiva nät Matriser
Vektorer, matriser, nätverk - några elementa Innehåll: Vektorer Radvektorer och kolumnvektorer Operationer med vektorer Input- och outputvektorer i neurala nätverk Utvikning om kompetitiva nät Matriser
Asymptotisk analys innebär att... man försöker uppskatta vad som händer för stora indatamängder.
 OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna kan man bara ha rätt eller fel, dvs frågan måste vara helt korrekt besvarad för att man skall
OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna kan man bara ha rätt eller fel, dvs frågan måste vara helt korrekt besvarad för att man skall
Vad behövs för att skapa en tillståndsrymd?
 OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervarlsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
OBS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervarlsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
5 Linjär algebra. 5.1 Addition av matriser 5 LINJÄR ALGEBRA
 5 LINJÄR ALGEBRA 5 Linjär algebra En kul gren av matematiken som inte fått speciellt mycket utrymme i gymnasiet men som har många tillämpningsområden inom t.ex. fysik, logistik, ekonomi, samhällsplanering
5 LINJÄR ALGEBRA 5 Linjär algebra En kul gren av matematiken som inte fått speciellt mycket utrymme i gymnasiet men som har många tillämpningsområden inom t.ex. fysik, logistik, ekonomi, samhällsplanering
MVE035. Sammanfattning LV 1. Blom, Max. Engström, Anne. Cvetkovic Destouni, Sofia. Kåreklint, Jakob. Hee, Lilian.
 MVE035 Sammanfattning LV 1 Blom, Max Engström, Anne Cvetkovic Destouni, Sofia Kåreklint, Jakob Hee, Lilian Hansson, Johannes 11 mars 2017 1 Partiella derivator Nedan presenteras en definition av partiell
MVE035 Sammanfattning LV 1 Blom, Max Engström, Anne Cvetkovic Destouni, Sofia Kåreklint, Jakob Hee, Lilian Hansson, Johannes 11 mars 2017 1 Partiella derivator Nedan presenteras en definition av partiell
Perceptron som ordklasstaggare: ett fördjupningsarbete i 729G43 -Artificiell Intelligens
 Perceptron som ordklasstaggare: ett fördjupningsarbete i 729G43 -Artificiell Intelligens Niklas Blomstrand Linköpings Universitet Inledning Att veta vilken ordklass ett ord tillhör är en viktig del i bearbetning
Perceptron som ordklasstaggare: ett fördjupningsarbete i 729G43 -Artificiell Intelligens Niklas Blomstrand Linköpings Universitet Inledning Att veta vilken ordklass ett ord tillhör är en viktig del i bearbetning
Tavelpresentation. Gustav Hallberg Jesper Strömberg Anthon Odengard Nils Tornberg Fredrik Blomgren Alexander Engblom. Januari 2018
 Tavelpresentation Gustav Hallberg Jesper Strömberg Anthon Odengard Nils Tornberg Fredrik Blomgren Alexander Engblom Januari 2018 1 Partiella derivator och deriverbarhet Differentierbarhet i en variabel
Tavelpresentation Gustav Hallberg Jesper Strömberg Anthon Odengard Nils Tornberg Fredrik Blomgren Alexander Engblom Januari 2018 1 Partiella derivator och deriverbarhet Differentierbarhet i en variabel
Antag att b är förgreningsfaktorn, d sökdjupet, T (d) tidskomplexiteten och M(d) minneskomplexiteten.
 tidskomplexiteten och M(d) minneskomplexiteten.") OS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
OS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
Sub-symbolisk kognition & Konnektionism. Kognitionsvetenskaplig Introduktionskurs (729G01) Mats Andrén,
 Mats Andrén,") Sub-symbolisk kognition & Konnektionism Kognitionsvetenskaplig Introduktionskurs (729G01) Mats Andrén, mats.andren@liu.se 1 Konnektionism Neutrala nät baseras på en (förenklad) modell av hur hjärnan fungerar.
Sub-symbolisk kognition & Konnektionism Kognitionsvetenskaplig Introduktionskurs (729G01) Mats Andrén, mats.andren@liu.se 1 Konnektionism Neutrala nät baseras på en (förenklad) modell av hur hjärnan fungerar.
1. Vi skriver upp ekvationssystemet i matrisform och gausseliminerar tills vi når trappstegsform,
 Lösningsförslag, Matematik 2, E, I, M, Media och T, 2 2 8.. Vi skriver upp ekvationssystemet i matrisform och gausseliminerar tills vi når trappstegsform, 2 2 2 a 2 2 2 a 2 2-2 2 a 7 7 2 a 7 7-7 2 a +
Lösningsförslag, Matematik 2, E, I, M, Media och T, 2 2 8.. Vi skriver upp ekvationssystemet i matrisform och gausseliminerar tills vi når trappstegsform, 2 2 2 a 2 2 2 a 2 2-2 2 a 7 7 2 a 7 7-7 2 a +
Antag att b är förgreningsfaktorn, d sökdjupet, T (d) tidskomplexiteten och M(d) minneskomplexiteten.
 tidskomplexiteten och M(d) minneskomplexiteten.") OS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
OS! För flervalsfrågorna gäller att ett, flera eller inget alternativ kan vara korrekt. På flervalsfrågorna ges 1 poäng för korrekt svar och 0,5 poäng om skillnaden mellan antalet korrekta svar och antalet
A B C D E F A B C D E F (3) Svar: Tabellen ger grafen:
 Svar: Tabellen ger grafen:") 1. Russel & Norvig menar att man kan utveckla AI-system som antingen tänker som en människa, handlar som en människa, tänker rationellt eller handlar rationellt. Förklara och exemplifiera dessa fyra synsätt.
1. Russel & Norvig menar att man kan utveckla AI-system som antingen tänker som en människa, handlar som en människa, tänker rationellt eller handlar rationellt. Förklara och exemplifiera dessa fyra synsätt.
Kognitiv Modellering
 Kognitiv Modellering Mårten Szymanowski 20 januari 2004 Innehåll 1 Kognitiv Modellering 2 1.1 Varför?................................ 2 2 Grundläggande psykologiska fenomen 3 2.1 Stimulusgeneralisering........................
Kognitiv Modellering Mårten Szymanowski 20 januari 2004 Innehåll 1 Kognitiv Modellering 2 1.1 Varför?................................ 2 2 Grundläggande psykologiska fenomen 3 2.1 Stimulusgeneralisering........................
SF1624 Algebra och geometri
 SF1624 Algebra och geometri Föreläsning 2 David Rydh Institutionen för matematik KTH 28 augusti 2018 Detta gjorde vi igår Punkter Vektorer och skalärer, multiplikation med skalär Linjärkombinationer, spannet
SF1624 Algebra och geometri Föreläsning 2 David Rydh Institutionen för matematik KTH 28 augusti 2018 Detta gjorde vi igår Punkter Vektorer och skalärer, multiplikation med skalär Linjärkombinationer, spannet
Vektorgeometri för gymnasister
 Vektorgeometri för gymnasister Per-Anders Svensson http://homepage.lnu.se/staff/psvmsi/vektorgeometri/gymnasiet.html Fakulteten för teknik Linnéuniversitetet Linjära avbildningar I Innehåll En liten tillbakablick:
Vektorgeometri för gymnasister Per-Anders Svensson http://homepage.lnu.se/staff/psvmsi/vektorgeometri/gymnasiet.html Fakulteten för teknik Linnéuniversitetet Linjära avbildningar I Innehåll En liten tillbakablick:
ANN fk. Örjan Ekeberg. Framåtkopplade Nät. återkopplade nät. Olika arkitekturer. BackPropagation through Time. Kalman-Filter tekniker
 Hantering av Tid Återkopplade Återkopplade Återkopplade t Återkopplade Återkopplade Temporala signaler är svåra Gör om temporal signal till spatial t 1 t 2 t 3 t 4 Återkopplade t Enklaste formen Neuronal
Hantering av Tid Återkopplade Återkopplade Återkopplade t Återkopplade Återkopplade Temporala signaler är svåra Gör om temporal signal till spatial t 1 t 2 t 3 t 4 Återkopplade t Enklaste formen Neuronal
1 Vektorer i koordinatsystem
 1 Vektorer i koordinatsystem Ex 11 Givet ett koordinatsystem i R y a 4 b x Punkten A = (3, ) och ortsvektorn a = (3, ) och punkten B = (5, 1) och ortsvsektorn b = (5, 1) uttrycks på samma sätt, som en
1 Vektorer i koordinatsystem Ex 11 Givet ett koordinatsystem i R y a 4 b x Punkten A = (3, ) och ortsvektorn a = (3, ) och punkten B = (5, 1) och ortsvsektorn b = (5, 1) uttrycks på samma sätt, som en
Mer om analytisk geometri
 1 Onsdag v 5 Mer om analytisk geometri Determinanter: Då man har en -matris kan man till den associera ett tal determinanten av som också skrivs Determinanter kommer att repeteras och studeras närmare
1 Onsdag v 5 Mer om analytisk geometri Determinanter: Då man har en -matris kan man till den associera ett tal determinanten av som också skrivs Determinanter kommer att repeteras och studeras närmare
FFM234, Klassisk fysik och vektorfält - Föreläsningsanteckningar
 FFM234, Klassisk fysik och vektorfält - Föreläsningsanteckningar Christian Forssén, Institutionen för fysik, Chalmers, Göteborg, Sverige Sep 11, 2017 12. Tensorer Introduktion till tensorbegreppet Fysikaliska
FFM234, Klassisk fysik och vektorfält - Föreläsningsanteckningar Christian Forssén, Institutionen för fysik, Chalmers, Göteborg, Sverige Sep 11, 2017 12. Tensorer Introduktion till tensorbegreppet Fysikaliska
Enhetsvektorer. Basvektorer i två dimensioner: 1 1 Basvektorer i tre dimensioner: Enhetsvektor i riktningen v: v v
 Vektoraddition u + v = u + v = [ ] u1 u 2 u 1 u 2 + u 3 + [ v1 v 2 ] = v 1 v 2 = v 3 [ u1 + v 1 u 2 + v 2 u 1 + v 1 u 2 + v 2 u 3 + v 3 ] Multiplikation med skalär α u = α [ u1 u 2 α u = α ] = u 1 u 2
Vektoraddition u + v = u + v = [ ] u1 u 2 u 1 u 2 + u 3 + [ v1 v 2 ] = v 1 v 2 = v 3 [ u1 + v 1 u 2 + v 2 u 1 + v 1 u 2 + v 2 u 3 + v 3 ] Multiplikation med skalär α u = α [ u1 u 2 α u = α ] = u 1 u 2
Linjärisering, Jacobimatris och Newtons metod.
 Linjärisering, Jacobimatris och Newtons metod Analys och Linjär Algebra, del C, K/Kf/Bt, vt0 Inledning Vi skall lösa system av icke-linjära ekvationer Som exempel kan vi ta, x = 0, x = 0, som är ett system
Linjärisering, Jacobimatris och Newtons metod Analys och Linjär Algebra, del C, K/Kf/Bt, vt0 Inledning Vi skall lösa system av icke-linjära ekvationer Som exempel kan vi ta, x = 0, x = 0, som är ett system
Linjär Algebra M/TD Läsvecka 2
 Linjär Algebra M/TD Läsvecka 2 Omfattning och Innehåll 2.1 Matrisoperationer: addition av matriser, multiplikation av matris med skalär, multiplikation av matriser. 2.2-2.3 Matrisinvers, karakterisering
Linjär Algebra M/TD Läsvecka 2 Omfattning och Innehåll 2.1 Matrisoperationer: addition av matriser, multiplikation av matris med skalär, multiplikation av matriser. 2.2-2.3 Matrisinvers, karakterisering
Krafts olikhet. En momentant avkodbar kod (prefixkod) med kodordslängderna l 1,...,l N existerar om och endast om. 2 l i. 1 i=1
 med kodordslängderna l 1,...,l N existerar om och endast om. 2 l i. 1 i=1") Datakompression fö 2 p.1 Krafts olikhet En momentant avkodbar kod (prefixkod) med kodordslängderna l 1,...,l N existerar om och endast om N 2 l i 1 Bevis: Antag att vi har en trädkod. Låt l max =max{l
Datakompression fö 2 p.1 Krafts olikhet En momentant avkodbar kod (prefixkod) med kodordslängderna l 1,...,l N existerar om och endast om N 2 l i 1 Bevis: Antag att vi har en trädkod. Låt l max =max{l
 RÄKNEOPERATIONER MED VEKTORER LINJÄRA KOMBINATIONER AV VEKTORER ----------------------------------------------------------------- Låt u vara en vektor med tre koordinater, u = x, Vi säger att u är tredimensionell
RÄKNEOPERATIONER MED VEKTORER LINJÄRA KOMBINATIONER AV VEKTORER ----------------------------------------------------------------- Låt u vara en vektor med tre koordinater, u = x, Vi säger att u är tredimensionell
14 september, Föreläsning 5. Tillämpad linjär algebra
 14 september, 2016 Föreläsning 5 Tillämpad linjär algebra Innehåll Matriser Algebraiska operationer med matriser Definition av inversen av en matris Förra gången: Linjära ekvationer och dess lösningar
14 september, 2016 Föreläsning 5 Tillämpad linjär algebra Innehåll Matriser Algebraiska operationer med matriser Definition av inversen av en matris Förra gången: Linjära ekvationer och dess lösningar
15 september, Föreläsning 5. Tillämpad linjär algebra
 5 september, 5 Föreläsning 5 Tillämpad linjär algebra Innehåll Matriser Algebraiska operationer med matriser Definition och beräkning av inversen av en matris Förra gången: Linjära ekvationer och dess
5 september, 5 Föreläsning 5 Tillämpad linjär algebra Innehåll Matriser Algebraiska operationer med matriser Definition och beräkning av inversen av en matris Förra gången: Linjära ekvationer och dess
DERIVATA. = lim. x n 2 h h n. 2
 DERIVATA Läs avsnitten 6.-6.5. Lös övningarna 6.cd, 6.2, 6.3bdf, 6.4abc, 6.5bcd, 6.6bcd, 6.7, 6.9 oc 6.. Läsanvisningar Allmänt gäller som vanligt att bevisen inte ingår i kursen, men det är mycket nyttigt
DERIVATA Läs avsnitten 6.-6.5. Lös övningarna 6.cd, 6.2, 6.3bdf, 6.4abc, 6.5bcd, 6.6bcd, 6.7, 6.9 oc 6.. Läsanvisningar Allmänt gäller som vanligt att bevisen inte ingår i kursen, men det är mycket nyttigt
Artificiell Intelligens Lektion 7
 Laboration 6 Artificiell Intelligens Lektion 7 Neurala nätverk (Lab 6) Probabilistiska resonemang Vad? Mönsterigenkänning Lära ett neuralt nätverk att känna igen siffror Varför? Få ökad förståelse för
Laboration 6 Artificiell Intelligens Lektion 7 Neurala nätverk (Lab 6) Probabilistiska resonemang Vad? Mönsterigenkänning Lära ett neuralt nätverk att känna igen siffror Varför? Få ökad förståelse för
Vectorer, spannet av vektorer, lösningsmängd av ett ekvationssystem.
 Vectorer, spannet av vektorer, lösningsmängd av ett ekvationssystem. Begrepp som diskuteras i det kapitlet. Vektorer, addition och multiplikation med skalärer. Geometrisk tolkning. Linjär kombination av
Vectorer, spannet av vektorer, lösningsmängd av ett ekvationssystem. Begrepp som diskuteras i det kapitlet. Vektorer, addition och multiplikation med skalärer. Geometrisk tolkning. Linjär kombination av
Linjär Algebra, Föreläsning 2
 Linjär Algebra, Föreläsning 2 Tomas Sjödin Linköpings Universitet Geometriska vektorer, rummen R n och M n 1 En (geometrisk) vektor är ett objekt som har storlek och riktning, men inte någon naturlig startpunkt.
Linjär Algebra, Föreläsning 2 Tomas Sjödin Linköpings Universitet Geometriska vektorer, rummen R n och M n 1 En (geometrisk) vektor är ett objekt som har storlek och riktning, men inte någon naturlig startpunkt.
Uppsala Universitet Matematiska Institutionen Thomas Erlandsson
 Uppsala Universitet Matematiska Institutionen Thomas Erlandsson MATRISER MED MERA VEKTORRUM DEFINITION Ett vektorrum V är en mängd av symboler u som vi kan addera samt multiplicera med reella tal c så
Uppsala Universitet Matematiska Institutionen Thomas Erlandsson MATRISER MED MERA VEKTORRUM DEFINITION Ett vektorrum V är en mängd av symboler u som vi kan addera samt multiplicera med reella tal c så
Viktiga begrepp, satser och typiska problem i kursen MVE460, 2015.
 Viktiga begrepp, satser och typiska problem i kursen MVE460, 2015. Begrepp och definitioner Egenskaper och satser Typiska problem Reella tal. Rationella tal. a(b + c) = ab + ac Bråkräkning. Irrationella
Viktiga begrepp, satser och typiska problem i kursen MVE460, 2015. Begrepp och definitioner Egenskaper och satser Typiska problem Reella tal. Rationella tal. a(b + c) = ab + ac Bråkräkning. Irrationella
SF1624 Algebra och geometri Lösningsförslag till tentamen DEL A
 SF1624 Algebra och geometri Lösningsförslag till tentamen 14129 DEL A 1 (a) Bestäm linjen genom punkterna A = (,, 1) och B = (2, 4, 1) (1 p) (b) Med hjälp av projektion kan man bestämma det kortaste avståndet
SF1624 Algebra och geometri Lösningsförslag till tentamen 14129 DEL A 1 (a) Bestäm linjen genom punkterna A = (,, 1) och B = (2, 4, 1) (1 p) (b) Med hjälp av projektion kan man bestämma det kortaste avståndet
1 Ortogonalitet. 1.1 Skalär produkt. Man kan tala om vinkel mellan vektorer.
 Ortogonalitet Man kan tala om vinkel mellan vektorer.. Skalär produkt Vi definierar längden (eller normen) av en vektor som ett reellt tal 0 (Se boken avsnitt.). Vi definierar skalär produkt (Inner product),
Ortogonalitet Man kan tala om vinkel mellan vektorer.. Skalär produkt Vi definierar längden (eller normen) av en vektor som ett reellt tal 0 (Se boken avsnitt.). Vi definierar skalär produkt (Inner product),
Veckoblad 4, Linjär algebra IT, VT2010
 Veckoblad, Linjär algebra IT, VT Under den fjärde veckan ska vi under måndagens föreläsning se hur man generaliserar vektorer i planet och rummet till vektorer med godtycklig dimension. Vi kommer också
Veckoblad, Linjär algebra IT, VT Under den fjärde veckan ska vi under måndagens föreläsning se hur man generaliserar vektorer i planet och rummet till vektorer med godtycklig dimension. Vi kommer också
Konvergens för iterativa metoder
 Konvergens för iterativa metoder 1 Terminologi Iterativa metoder används för att lösa olinjära (och ibland linjära) ekvationssystem numeriskt. De utgår från en startgissning x 0 och ger sedan en följd
Konvergens för iterativa metoder 1 Terminologi Iterativa metoder används för att lösa olinjära (och ibland linjära) ekvationssystem numeriskt. De utgår från en startgissning x 0 och ger sedan en följd
M0043M Integralkalkyl och Linjär Algebra, H14,
 M0043M Integralkalkyl och Linjär Algebra, H14, Linjär Algebra, Föreläsning 1 Staffan Lundberg / Ove Edlund Luleå Tekniska Universitet Staffan Lundberg / Ove Edlund M0043M H14 1/ 31 Lärare Ove Edlund Föreläsningar
M0043M Integralkalkyl och Linjär Algebra, H14, Linjär Algebra, Föreläsning 1 Staffan Lundberg / Ove Edlund Luleå Tekniska Universitet Staffan Lundberg / Ove Edlund M0043M H14 1/ 31 Lärare Ove Edlund Föreläsningar
Linjär Algebra M/TD Läsvecka 1
 Linjär Algebra M/TD Läsvecka 1 Omfattning: Lay, kapitel 1.1-1.9, Linjära ekvationer i linjär algebra Innehåll: Olika aspekter av linjära ekvationssystem: skärning mellan geometriska objekt, linjärkombination
Linjär Algebra M/TD Läsvecka 1 Omfattning: Lay, kapitel 1.1-1.9, Linjära ekvationer i linjär algebra Innehåll: Olika aspekter av linjära ekvationssystem: skärning mellan geometriska objekt, linjärkombination
Tavelpresentation - Flervariabelanalys. 1E January 2017
 Tavelpresentation - Flervariabelanalys 1E January 2017 1 Innehåll 1 Partiella derivator 3 2 Differentierbarhet 3 3 Kedjeregeln 4 3.1 Sats 2.3.4............................... 5 3.2 Allmänna kedjeregeln........................
Tavelpresentation - Flervariabelanalys 1E January 2017 1 Innehåll 1 Partiella derivator 3 2 Differentierbarhet 3 3 Kedjeregeln 4 3.1 Sats 2.3.4............................... 5 3.2 Allmänna kedjeregeln........................
1 Grundläggande kalkyler med vektorer och matriser
 Krister Svanberg, mars 2015 1 Grundläggande kalkyler med vektorer och matriser Trots att läsaren säkert redan behärskar grundläggande vektor- och matriskalkyler, ges här i Kapitel 1 en repetition om just
Krister Svanberg, mars 2015 1 Grundläggande kalkyler med vektorer och matriser Trots att läsaren säkert redan behärskar grundläggande vektor- och matriskalkyler, ges här i Kapitel 1 en repetition om just
Veckoblad 1, Linjär algebra IT, VT2010
 Veckoblad, Linjär algebra IT, VT Under den första veckan ska vi gå igenom (i alla fall stora delar av) kapitel som handlar om geometriska vektorer. De viktigaste teoretiska begreppen och resultaten i kapitlet
Veckoblad, Linjär algebra IT, VT Under den första veckan ska vi gå igenom (i alla fall stora delar av) kapitel som handlar om geometriska vektorer. De viktigaste teoretiska begreppen och resultaten i kapitlet
Repetition, Matematik 2 för lärare. Ï x + 2y - 3z = 1 Ô Ì 3x - y + 2z = a Ô Á. . Beräkna ABT. Beräkna (AB) T
 T") Repetition, Matematik 2 för lärare Ï -2x + y + 2z = 3 1. Ange för alla reella a lösningsmängden till ekvationssystemet Ì ax + 2y + z = 1. Ó x + 3y - z = 4 2. Vad är villkoret på talet a för att ekvationssystemet
Repetition, Matematik 2 för lärare Ï -2x + y + 2z = 3 1. Ange för alla reella a lösningsmängden till ekvationssystemet Ì ax + 2y + z = 1. Ó x + 3y - z = 4 2. Vad är villkoret på talet a för att ekvationssystemet
Föreläsningsanteckningar Linjär Algebra II Lärarlyftet
 Föreläsningsanteckningar Linjär Algebra II Lärarlyftet Per Alexandersson Föreläsning I Timme I: Repetition av matriser, linjära ekvationssystem Linjärt ekvationssystem: x + y + z 3w = 3 2x + y + z 4w =
Föreläsningsanteckningar Linjär Algebra II Lärarlyftet Per Alexandersson Föreläsning I Timme I: Repetition av matriser, linjära ekvationssystem Linjärt ekvationssystem: x + y + z 3w = 3 2x + y + z 4w =
1 Konvexa optimeringsproblem grundläggande egenskaper
 Krister Svanberg, april 2012 1 Konvexa optimeringsproblem grundläggande egenskaper Ett optimeringsproblem är i viss mening godartat om det tillåtna området är en konvex mängd och den målfunktion som ska
Krister Svanberg, april 2012 1 Konvexa optimeringsproblem grundläggande egenskaper Ett optimeringsproblem är i viss mening godartat om det tillåtna området är en konvex mängd och den målfunktion som ska
October 9, Innehållsregister
 October 9, 017 Innehållsregister 1 Vektorer 1 1.1 Geometrisk vektor............................... 1 1. Vektor och koordinatsystem.......................... 1 1.3 Skalär produkt (dot eller inner product)...................
October 9, 017 Innehållsregister 1 Vektorer 1 1.1 Geometrisk vektor............................... 1 1. Vektor och koordinatsystem.......................... 1 1.3 Skalär produkt (dot eller inner product)...................
Fel- och störningsanalys
 Fel- och störningsanalys Terminologi Antag att x är ett exakt värde och x är en approximation av x. Vi kallar då absoluta felet i x = x x, relativa felet i x = x x x. Ofta känner vi inte felet precis utan
Fel- och störningsanalys Terminologi Antag att x är ett exakt värde och x är en approximation av x. Vi kallar då absoluta felet i x = x x, relativa felet i x = x x x. Ofta känner vi inte felet precis utan
1 Begrepp och Hypoteser. 2 Inlärning genom sökning. 3 Objektiv inlärning. Inlärning av en boolsk funktion från exempel.
 1 Begrepp oc Eempel Begreppsinlärning List-ten-Eliminate Begreppsinlärning 1 Begrepp oc Eempel List-ten-Eliminate Begreppsinlärning (Concept Learning) Inlärning av en boolsk funktion från eempel Kategorier
1 Begrepp oc Eempel Begreppsinlärning List-ten-Eliminate Begreppsinlärning 1 Begrepp oc Eempel List-ten-Eliminate Begreppsinlärning (Concept Learning) Inlärning av en boolsk funktion från eempel Kategorier
3. Vilka taltripler (x, y, z) satisfierar ekvationssystemet 3x + 2y 3z = 3 2x + y + 4z = 7
 satisfierar ekvationssystemet 3x + 2y 3z = 3 2x + y + 4z = 7") MÄLARDALENS HÖGSKOLA Akademin för utbildning, kultur och kommunikation Avdelningen för tillämpad matematik Examinator: Lars-Göran Larsson TENTAMEN I MATEMATIK MAA Grundläggande vektoralgebra, TEN5 alt.
MÄLARDALENS HÖGSKOLA Akademin för utbildning, kultur och kommunikation Avdelningen för tillämpad matematik Examinator: Lars-Göran Larsson TENTAMEN I MATEMATIK MAA Grundläggande vektoralgebra, TEN5 alt.
Numeriska metoder, grundkurs II. Dagens program. Hur skriver man en funktion? Administrativt. Hur var det man gjorde?
 Numeriska metoder, grundkurs II Övning 1 för I2 Dagens program Övningsgrupp 1 Johannes Hjorth hjorth@nada.kth.se Rum 163:006, Roslagstullsbacken 35 08-790 69 00 Kurshemsida: http://www.csc.kth.se/utbildning/kth/kurser/2d1240/numi07
Numeriska metoder, grundkurs II Övning 1 för I2 Dagens program Övningsgrupp 1 Johannes Hjorth hjorth@nada.kth.se Rum 163:006, Roslagstullsbacken 35 08-790 69 00 Kurshemsida: http://www.csc.kth.se/utbildning/kth/kurser/2d1240/numi07
Algoritmer, datastrukturer och komplexitet
 Algoritmer, datastrukturer och komplexitet Övning 6 Anton Grensjö grensjo@csc.kth.se 4 oktober 2017 1 Idag Algoritmkonstruktion (lite blandat) Redovisning och inlämning av labbteori 3 2 Uppgifter Uppgift
Algoritmer, datastrukturer och komplexitet Övning 6 Anton Grensjö grensjo@csc.kth.se 4 oktober 2017 1 Idag Algoritmkonstruktion (lite blandat) Redovisning och inlämning av labbteori 3 2 Uppgifter Uppgift
Optimering av hyperparametrar till artificiella neurala nätverk med genetiska algoritmer.
 Optimering av hyperparametrar till artificiella neurala nätverk med genetiska algoritmer. Simon Stensson Juni 6, 2016 Abstract This master thesis explores the feasibility of using genetic algorithms in
Optimering av hyperparametrar till artificiella neurala nätverk med genetiska algoritmer. Simon Stensson Juni 6, 2016 Abstract This master thesis explores the feasibility of using genetic algorithms in
Stora bilden av Linjära algebran. Vektorrum, linjära transformationer, matriser (sammanfattning av begrepp)
") Stora bilden av Linjära algebran. Vektorrum, linjära transformationer, matriser (sammanfattning av begrepp) Linjär algebra består av tre grenar eller koncept: geometriska begreppet av vektorrum, analysbegreppet
Stora bilden av Linjära algebran. Vektorrum, linjära transformationer, matriser (sammanfattning av begrepp) Linjär algebra består av tre grenar eller koncept: geometriska begreppet av vektorrum, analysbegreppet
Fel- och störningsanalys
 Fel- och störningsanalys 1 Terminologi Antag att x är ett exakt värde och x är en approximation av x. Vi kallar då absoluta felet i x = x x, relativa felet i x = x x x. Ofta känner vi inte felet precis
Fel- och störningsanalys 1 Terminologi Antag att x är ett exakt värde och x är en approximation av x. Vi kallar då absoluta felet i x = x x, relativa felet i x = x x x. Ofta känner vi inte felet precis
1 Ickelinjär optimering under bivillkor
 Krister Svanberg, maj 2012 1 Ickelinjär optimering under bivillkor Hittills har vi behandlat optimeringsproblem där alla variabler x j kunnat röra sig fritt, oberoende av varann, och anta hur stora eller
Krister Svanberg, maj 2012 1 Ickelinjär optimering under bivillkor Hittills har vi behandlat optimeringsproblem där alla variabler x j kunnat röra sig fritt, oberoende av varann, och anta hur stora eller
SHAZAM! En!smart!musiktjänst! Linha108! Fördjupningsarbete!729G43!
 SHAZAM Ensmartmusiktjänst Linha108 Fördjupningsarbete729G43 Sammanfattning Shazam är en musiktjänst som genom en sökalgoritm kan känna igen ljud och returnera låt och artist till användaren. Detta sker
SHAZAM Ensmartmusiktjänst Linha108 Fördjupningsarbete729G43 Sammanfattning Shazam är en musiktjänst som genom en sökalgoritm kan känna igen ljud och returnera låt och artist till användaren. Detta sker
. (2p) 2x + 2y + z = 4 y + 2z = 2 4x + 3y = 6
 2x + 2y + z = 4 y + 2z = 2 4x + 3y = 6") Kursen bedöms med betyg, 4, 5 eller underkänd, där 5 är högsta betyg För godkänt betyg krävs minst 4 poäng från uppgifterna -7 Var och en av dessa sju uppgifter kan ge maximalt poäng För var och en av
Kursen bedöms med betyg, 4, 5 eller underkänd, där 5 är högsta betyg För godkänt betyg krävs minst 4 poäng från uppgifterna -7 Var och en av dessa sju uppgifter kan ge maximalt poäng För var och en av
Geometriska vektorer
 Föreläsning 1, Linjär algebra IT VT2008 1 Geometriska vektorer De begrepp som linjär algebra kretsar kring är vektorer och matriser Dessa svarar mot datorernas fält (`arra') av dimension ett respektive
Föreläsning 1, Linjär algebra IT VT2008 1 Geometriska vektorer De begrepp som linjär algebra kretsar kring är vektorer och matriser Dessa svarar mot datorernas fält (`arra') av dimension ett respektive
Föreläsning 5. Approximationsteori
 Föreläsning 5 Approximationsteori Låt f vara en kontinuerlig funktion som vi vill approximera med en enklare funktion f(x) Vi kommer använda två olika approximationsmetoder: interpolation och minstrakvadratanpassning
Föreläsning 5 Approximationsteori Låt f vara en kontinuerlig funktion som vi vill approximera med en enklare funktion f(x) Vi kommer använda två olika approximationsmetoder: interpolation och minstrakvadratanpassning
Exempel :: Spegling i godtycklig linje.
 INNEHÅLL Exempel :: Spegling i godtycklig linje. c Mikael Forsberg :: 6 augusti 05 Sammanfattning:: I detta dokument så är vårt uppdrag att beräkna matrisen för spegling i en godtycklig linje y = kx som
INNEHÅLL Exempel :: Spegling i godtycklig linje. c Mikael Forsberg :: 6 augusti 05 Sammanfattning:: I detta dokument så är vårt uppdrag att beräkna matrisen för spegling i en godtycklig linje y = kx som
Dagens ämnen. Linjära ekvationssystem: Successiv elimination Vektorer Definitionen Grundläggande räkneoperationer Bas och koordinater Ortsvektorer
 Dagens ämnen Linjära ekvationssystem: Successiv elimination Vektorer Definitionen Grundläggande räkneoperationer Bas och koordinater Ortsvektorer Linjära ekvationer Med en linjär ekvation i n variabler,
Dagens ämnen Linjära ekvationssystem: Successiv elimination Vektorer Definitionen Grundläggande räkneoperationer Bas och koordinater Ortsvektorer Linjära ekvationer Med en linjär ekvation i n variabler,
Linjära avbildningar. Låt R n vara mängden av alla vektorer med n komponenter, d.v.s. x 1 x 2. x = R n = x n
 Linjära avbildningar Låt R n vara mängden av alla vektorer med n komponenter, d.v.s. R n = { x = x x. x n } x, x,..., x n R. Vi räknar med vektorer x, y likandant som i planet och i rymden. vektorsumma:
Linjära avbildningar Låt R n vara mängden av alla vektorer med n komponenter, d.v.s. R n = { x = x x. x n } x, x,..., x n R. Vi räknar med vektorer x, y likandant som i planet och i rymden. vektorsumma:
MULTIPLIKATION AV MATRISER, BASER I RUMMET SAMT FÖRSTA MÖTET MED MATRISINVERSER = = =
 Matematiska institutionen Stockholms universitet CG Matematik med didaktisk inriktning 2 Problem i Algebra, geometri och kombinatorik Snedsteg 5 MULTIPLIKATION AV MATRISER, BASER I RUMMET SAMT FÖRSTA MÖTET
Matematiska institutionen Stockholms universitet CG Matematik med didaktisk inriktning 2 Problem i Algebra, geometri och kombinatorik Snedsteg 5 MULTIPLIKATION AV MATRISER, BASER I RUMMET SAMT FÖRSTA MÖTET
Matriser. En m n-matris A har följande form. Vi skriver också A = (a ij ) m n. m n kallas för A:s storlek. 0 1, 0 0. Exempel 1
 m n. m n kallas för A:s storlek. 0 1, 0 0. Exempel 1") Matriser En m n-matris A har följande form a 11... a 1n A =.., a ij R. a m1... a mn Vi skriver också A = (a ij ) m n. m n kallas för A:s storlek. Exempel 1 1 0 0 1, 0 0 ( 1 3 ) 2, ( 7 1 2 3 2, 1 3, 2 1
Matriser En m n-matris A har följande form a 11... a 1n A =.., a ij R. a m1... a mn Vi skriver också A = (a ij ) m n. m n kallas för A:s storlek. Exempel 1 1 0 0 1, 0 0 ( 1 3 ) 2, ( 7 1 2 3 2, 1 3, 2 1
Vektorrum. EX. Plan och linjer i rummet genom origo. Allmänt; mängden av lösningar till AX = 0.
 Vektorrum Denna kurs handlar till stor del om s k linjära rum eller vektorrum. Dessa kan ses som generaliseringar av R n. Skillnaden består främst i att teorin nu blir mer abstrakt. Detta är själva poängen;
Vektorrum Denna kurs handlar till stor del om s k linjära rum eller vektorrum. Dessa kan ses som generaliseringar av R n. Skillnaden består främst i att teorin nu blir mer abstrakt. Detta är själva poängen;
TENTAMEN. Matematik 1 Kurskod HF1903 Skrivtid 13:15-17:15 Onsdagen 25 september 2013 Tentamen består av 3 sidor
 TENTAMEN Matematik Kurskod HF903 Skrivtid 3:5-7:5 Onsdagen 5 september 03 Tentamen består av 3 sidor Hjälpmedel: Utdelat formelblad. Räknedosa ej tillåten. Tentamen består av 3 uppgifter som totalt kan
TENTAMEN Matematik Kurskod HF903 Skrivtid 3:5-7:5 Onsdagen 5 september 03 Tentamen består av 3 sidor Hjälpmedel: Utdelat formelblad. Räknedosa ej tillåten. Tentamen består av 3 uppgifter som totalt kan
Komponentvisa operationer,.-notation Multiplikation (*), division (/) och upphöj till (ˆ) av vektorer följer vanliga vektoralgebraiska
, division (/) och upphöj till (ˆ) av vektorer följer vanliga vektoralgebraiska") Matlab-föreläsning 3 (4), 17 september, 2015 Innehåll Sekvenser (från förra föreläsningen) Upprepning med for-slingor och while-slingor Villkorssatser med if - then -else - Logik Sekvenser - repetion från
Matlab-föreläsning 3 (4), 17 september, 2015 Innehåll Sekvenser (från förra föreläsningen) Upprepning med for-slingor och while-slingor Villkorssatser med if - then -else - Logik Sekvenser - repetion från
1 Reducerat faktorförsök rf f
 1 REDUCERAT FAKTORFÖRSÖK RF F 1 Reducerat faktorförsök rf f Vi skall med tre faktorer och således 2 3 försök reducera till ett fullständigt 2 2 försök. 1.1 Tre faktorer Vi repeterar med ett tidigare fullständigt
1 REDUCERAT FAKTORFÖRSÖK RF F 1 Reducerat faktorförsök rf f Vi skall med tre faktorer och således 2 3 försök reducera till ett fullständigt 2 2 försök. 1.1 Tre faktorer Vi repeterar med ett tidigare fullständigt
1. (Dugga 1.1) (a) Bestäm v (3v 2u) om v = . (1p) and u =
 (a) Bestäm v (3v 2u) om v = . (1p) and u =") Kursen bedöms med betyg,, 5 eller underkänd, där 5 är högsta betyg. För godkänt betyg krävs minst poäng från uppgifterna -7. Var och en av dessa sju uppgifter kan ge maximalt poäng. För var och en av uppgifterna
Kursen bedöms med betyg,, 5 eller underkänd, där 5 är högsta betyg. För godkänt betyg krävs minst poäng från uppgifterna -7. Var och en av dessa sju uppgifter kan ge maximalt poäng. För var och en av uppgifterna
SF1624 Algebra och geometri Tentamen Onsdagen 29 oktober, 2014
 SF1624 Algebra och geometri Tentamen Onsdagen 29 oktober, 214 Skrivtid: 14.-19. Tillåtna hjälpmedel: inga Examinator: Roy Skjelnes Tentamen består av nio uppgifter som vardera ger maximalt fyra poäng.
SF1624 Algebra och geometri Tentamen Onsdagen 29 oktober, 214 Skrivtid: 14.-19. Tillåtna hjälpmedel: inga Examinator: Roy Skjelnes Tentamen består av nio uppgifter som vardera ger maximalt fyra poäng.
P Q = ( 2, 1, 1), P R = (0, 1, 0) och QR = (2, 2, 1). arean = 1 2 P Q P R
, P R = (0, 1, 0) och QR = (2, 2, 1). arean = 1 2 P Q P R") 1 Matematiska Institutionen KTH Lösningar till några övningar på geometri och vektorer inför lappskrivning nummer 2 på kursen Linjär algebra II, SF1604, vt11. 1. En triangel har hörn i punkterna (1, 2,
1 Matematiska Institutionen KTH Lösningar till några övningar på geometri och vektorer inför lappskrivning nummer 2 på kursen Linjär algebra II, SF1604, vt11. 1. En triangel har hörn i punkterna (1, 2,
e 3 e 2 e 1 Kapitel 3 Vektorer i planet och i rummet precis ett sätt skrivas v = x 1 e 1 + x 2 e 2
 Kapitel 3 Vektorer i planet och i rummet B e 3 e 2 A e 1 C Figur 3.16 Vi har ritat de riktade sträckor som representerar e 1, e 2, e 3 och v och som har utgångspunkten A. Vidare har vi skuggat planet Π
Kapitel 3 Vektorer i planet och i rummet B e 3 e 2 A e 1 C Figur 3.16 Vi har ritat de riktade sträckor som representerar e 1, e 2, e 3 och v och som har utgångspunkten A. Vidare har vi skuggat planet Π
1 Linjära ekvationssystem. 2 Vektorer
 För. 1 1 Linjära ekvationssystem Gaußelimination - sriv om systemet för att få ett trappformat system genom att: byta ordningen mellan ekvationer eller obekanta; multiplicera en ekvation med en konstant
För. 1 1 Linjära ekvationssystem Gaußelimination - sriv om systemet för att få ett trappformat system genom att: byta ordningen mellan ekvationer eller obekanta; multiplicera en ekvation med en konstant
Algoritmer, datastrukturer och komplexitet
 Algoritmer, datastrukturer och komplexitet Övning 6 Anton Grensjö grensjo@csc.kth.se 9 oktober 2015 Anton Grensjö ADK Övning 6 9 oktober 2015 1 / 23 Översikt Kursplanering Ö5: Grafalgoritmer och undre
Algoritmer, datastrukturer och komplexitet Övning 6 Anton Grensjö grensjo@csc.kth.se 9 oktober 2015 Anton Grensjö ADK Övning 6 9 oktober 2015 1 / 23 Översikt Kursplanering Ö5: Grafalgoritmer och undre
Självlärande Othello-spelare
 Självlärande Othello-spelare Kan en dator lära sig att spela Othello? KLAS BJÖRKQVIST och JOHAN WESTER Examensarbete Stockholm, Sverige 2010 Självlärande Othello-spelare Kan en dator lära sig att spela
Självlärande Othello-spelare Kan en dator lära sig att spela Othello? KLAS BJÖRKQVIST och JOHAN WESTER Examensarbete Stockholm, Sverige 2010 Självlärande Othello-spelare Kan en dator lära sig att spela
Begrepp:: Kort om Kryssprodukt
 Begrepp:: Kort om Kryssprodukt Introduktion till kryssprodukten Namnet kryssprodukt kommer av att produktsymbolen skrivs som ett kryss. Kryssprodukten av två vektorer u och v skrivs då u v. input = vektorer
Begrepp:: Kort om Kryssprodukt Introduktion till kryssprodukten Namnet kryssprodukt kommer av att produktsymbolen skrivs som ett kryss. Kryssprodukten av två vektorer u och v skrivs då u v. input = vektorer
SF1624 Algebra och geometri Tentamen med lösningsförslag onsdag, 11 januari 2017
 SF64 Algebra och geometri Tentamen med lösningsförslag onsdag, januari 7. (a) För vilka värden på k har ekvationssystemet (med avseende på x, y och z) kx + ky + z 3 x + ky + z 4x + 3y + 3z 8 en entydig
SF64 Algebra och geometri Tentamen med lösningsförslag onsdag, januari 7. (a) För vilka värden på k har ekvationssystemet (med avseende på x, y och z) kx + ky + z 3 x + ky + z 4x + 3y + 3z 8 en entydig
Neuronnätsbaserad agent
 2001-10-05 Torbjörn Bäckmark Sammanfattning Jag har undersökt möjligheten att utveckla en agent som använder neurala nätverk för övervakning av börssystem. Jag har tittat på sambandet mellan köp- och säljvolymer
2001-10-05 Torbjörn Bäckmark Sammanfattning Jag har undersökt möjligheten att utveckla en agent som använder neurala nätverk för övervakning av börssystem. Jag har tittat på sambandet mellan köp- och säljvolymer