Komihåg 5: ( ) + " # " # r BA Accelerationsanalys i planet: a A. = a B. + " # r BA
|
|
|
- Dan Bergman
- för 6 år sedan
- Visningar:
Transkript
1 1 Föreläsning 6: Relativ rörelse (kap ) Komihåg 5: ( ) Accelerationssamb: a A = a B + " # r BA + " # " # r BA Accelerationsanalys i planet: a A = a B " d BA # 2 e r + d BA # e # Rullning på plan (och krökt yta) Samband för tidsderivering av fysikaliska vektorer: V = " # V + V rel För så kallade vektorer som lägen, med origoberoende, måste kroppsfixa systemet ha samma origo som inertialsystemet!!!! Samband mellan absolut och relativ rörelse Låt oss fortsätta att analysera en rörelse på en rörlig stel kropp Vi har ett inertialsystem (universum), samt ett rörligt kroppsfixt koordinatsystem (jorden) med kroppens origo i referenspunkten O (som förut betecknades B) Vi inför det relativa läget r rel = r A " r O' (för en medmänniska), samt det absoluta läget r abs = r A (för hen) Relativ rörelse (i kroppen): I det kroppsfixa koordinatsystemet skrivs relativa läget som r rel = xe x + ye y + ze z Med den relativa hastigheten menas v rel = x e x + y e y + z e z, som om basvektorerna var konstanta Likaså för accelerationen a rel = x e x + y e y + z e z Men tidsderiveringarna vi har gjort ovan är inte fullständiga, det saknas tidsderivator av basvektorerna Sambandet absolut/relativ rörelse
2 2 För basvektorernas derivering har vi dock lärt oss att e xyz = " # e xyz Därför blir den fullständiga deriveringen av relativa läget: r rel = ( x e x + y e y + z e z )+(x e x + y e y + z e z ), dvs r rel = v rel + " # r rel Sambandet för absolut/relativ hastighet blir sålunda: v abs = v O' + " # r rel + v rel, där v SP är den så kallade v SP systempunktshastigheten, dvs stelkroppshastigheten i aktuellt läge Ytterligare en fullständig derivering av relativa läget ger sedan r rel = a rel + " # v rel + " # r rel + " # ( v rel + " # r rel ) = a rel + 2" # v rel + " # r rel + " # (" # r rel ) Sambandet för absolut/relativ acceleration blir alltså: Vi får: a abs = a O' + " # r rel + " # (" # r rel ) " 14 2 # v 43 rel + a rel a sp Detta accelerationssamband kallas Coriolis teorem En grupp av termer har med stelkroppaccelerationen att göra, a SP, de andra har med relativa rörelsen att göra Förutom den relativa accelerationen har korrekt tidsderivering lett till coriolisaccelerationen a cor, en extra acceleration som har att göra med byte av systempunkter med olika hastigheter att göra a cor
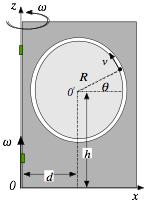
3 3 Exempel 28*: Betrakta en partikel i likformig cirkelrörelse (konstant relativ fart) på likformigt roterande dörrskiva Dörren med cirkelbanan är ett rörligt referenssystem som roterar kring en fix z-axel Beskriv riktning av följande vektorstorheter: a) Systempunktshastigheten, b) Relativa hastigheten, c) Absoluta hastigheten, d) Systempunktsaccelerationen, e) Relativa accelerationen, f) Coriolisaccelerationen, g) Absoluta accelerationen Lösning: a) Systempunkten där partikeln befinner sig (fix i dörren) är på väg in i bildens (dörrens) plan b) Relativa rörelsen är en likformig cirkelrörelse kring O " Bortse ifrån att systempunkten själv rör sig i cirkel kring den fixa z-axeln Relativa hastigheten är en vektor i cirkelns tangentriktning c) Absoluta hastigheten är vektorsumman av systempunktshastigheten och relativa hastigheten Man
4 4 behöver tre komponenter för att beskriva riktningen i referenssystemet d) Systempunktsaccelerationen är idetta fall riktad in mot z-axeln, ty z-axeln är fix och " är en konstant vektor Den beror av avståndet till rotationsaxeln e) Relativa accelerationen är riktad in mot banans mitt O " f) Coriolisacceleration 2" # v rel är alltid vinkelrät mot relativa hastigheten och vektorn " Riktningen fås med skruvregeln Det blir två fall: i övre delen av cirkelbanan är coriolisacceleration riktad ut ur referenssystemets rörelseplan (dvs negativ y-riktning), i undre delen av cirkelbanan är coriolisaccelerationen riktad in i dörren (dvs positiv y-riktning) g) Absoluta accelerationen är vektorsumman av systempunktsaccelerationen, coriolisaccelerationen och relativa accelerationen Exempel 28: Betrakta partikel i likformig cirkelrörelse (konstant relativ fart) på likformigt roterande (konstant vinkelhastighet) dörrskiva Dörren med cirkelbanan är ett rörligt referenssystem som roterar kring en fix z-axel Bestäm som funktion av " följande vektorstorheter: a) Systempunktshastigheten, b) Relativa hastigheten, c) Absoluta hastigheten, d) Systempunktsaccelerationen, e) Relativa accelerationen, f) Coriolisaccelerationen, g) Absoluta accelerationen
5 5
6 6 Lösning: Inför förutom x, y,z-riktningar även tangent- och normalriktning till cirkelbanan a) Systempunktshastigheten v O + " # r rel, där r rel = (d + Rcos")e x + (h + Rsin")e z, " = "e z och v O = 0, är v sp = (d + Rcos")#e y b) Relativa hastigheten är v rel = ve t, där e t = "sin#e x + cos#e z c) Absoluta hastigheten blir: v = (d + Rcos")#e y + ve t d) Systempunktsaccelerationen a O + " # (" # r rel ) med a O = 0, " # r rel = v sp = (d + Rcos$)"e y blir a sp = "(d + Rcos#)$ 2 e x (skruvregeln) e) Relativa accelerationen som för likformig cirkelrörelse blir a rel = v 2 R e n, riktad mot O " med e n = "cos#e x " sin#e z f) Coriolisaccelerationen blir (skruvregeln) a cor = 2"ve z # ($sin%e x + cos%e z ) = $2"v sin%e y g) Absoluta accelerationen blir a = "2#v sin$e y " (d + Rcos$)# 2 e x + v 2 e t R e n
Föreläsning 5: Acceleration och tidsderivering (kap ) . Sambandet mellan olika punkters hastigheter i en stel kropp: v A
 . Sambandet mellan olika punkters hastigheter i en stel kropp: v A") 1 Föreläsning 5: Acceleration och tidsderivering (kap 212-215) Komihåg 4: Vinkelhastighetsvektorn " = # e z Skillnadsvektorn mellan två punkter i stel kropp kan bara vrida sig: r BA = " # r BA Sambandet
1 Föreläsning 5: Acceleration och tidsderivering (kap 212-215) Komihåg 4: Vinkelhastighetsvektorn " = # e z Skillnadsvektorn mellan två punkter i stel kropp kan bara vrida sig: r BA = " # r BA Sambandet
=v sp. - accelerationssamband, Coriolis teorem. Kraftekvationen För en partikel i A som har accelerationen a abs
 1 Föreläsning 7: Fiktiva (tröghets-)krafter (kap A) Komihåg 6: Absolut och relativ rörelse för en partikel - hastighetssamband: v abs = v O' + # r 1 42 4 3 rel + v rel =v sp - accelerationssamband, Coriolis
1 Föreläsning 7: Fiktiva (tröghets-)krafter (kap A) Komihåg 6: Absolut och relativ rörelse för en partikel - hastighetssamband: v abs = v O' + # r 1 42 4 3 rel + v rel =v sp - accelerationssamband, Coriolis
Föreläsning 10: Stela kroppens plana dynamik (kap 3.13, 4.1-8) Komihåg 9: e y e z. e z )
 Komihåg 9: e y e z. e z )") 1 Föreläsning 10: Stela kroppens plana dynamik (kap 3.13, 4.1-8) Komihåg 9: H O = "I xz e x " I yz e y + I z e z H G = "I xz ( ) ( G e x " I G yz e y + I G z e z ) # (fixt origo, kroppsfix bas) # (kroppsfix
1 Föreläsning 10: Stela kroppens plana dynamik (kap 3.13, 4.1-8) Komihåg 9: H O = "I xz e x " I yz e y + I z e z H G = "I xz ( ) ( G e x " I G yz e y + I G z e z ) # (fixt origo, kroppsfix bas) # (kroppsfix
ALTERNATIVA KOORDINATSYSTEM -Cylindriska koordinatsystem. De polära koordinaterna r och " kan beskriva rörelsen i ett xyplan,
 KOMIHÅG 8: --------------------------------- Rörelsemängd: p = mv, Kinematiska storheter: r ( t), v ( t), a ( t) Kinematiska samband med begynnelsevillkor 1 Föreläsning 9: ALTERNATIVA KOORDINATSYSTEM -Cylindriska
KOMIHÅG 8: --------------------------------- Rörelsemängd: p = mv, Kinematiska storheter: r ( t), v ( t), a ( t) Kinematiska samband med begynnelsevillkor 1 Föreläsning 9: ALTERNATIVA KOORDINATSYSTEM -Cylindriska
Definitioner: hastighet : v = dr dt = r fart : v = v
 KOMIHÅG 8: --------------------------------- Jämvikten kan rubbas: stjälpning, glidning Flexibla system- jämvikt bara i jämviktslägen ---------------------------------- Föreläsning 9: PARTIKELKINEMATIK
KOMIHÅG 8: --------------------------------- Jämvikten kan rubbas: stjälpning, glidning Flexibla system- jämvikt bara i jämviktslägen ---------------------------------- Föreläsning 9: PARTIKELKINEMATIK
Tentamen i SG1140 Mekanik II för M, I. Problemtentamen
 2011-10-22 Tentamen i SG1140 Mekanik II för M, I. OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! KTH Mekanik 1. Problemtentamen Den kvadratiska skivan i den plana mekanismen i figuren har
2011-10-22 Tentamen i SG1140 Mekanik II för M, I. OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! KTH Mekanik 1. Problemtentamen Den kvadratiska skivan i den plana mekanismen i figuren har
Kursens olika delar. Föreläsning 0 (Självstudium): INTRODUKTION
: INTRODUKTION") 1 Föreläsning 0 (Självstudium): INTRODUKTION Kursens olika delar Teorin Tentamen efter kursen och/eller KS1+KS2 Inlämningsuppgifter Lära känna kraven på redovisningar! Problemlösning Tentamen efter kursen
1 Föreläsning 0 (Självstudium): INTRODUKTION Kursens olika delar Teorin Tentamen efter kursen och/eller KS1+KS2 Inlämningsuppgifter Lära känna kraven på redovisningar! Problemlösning Tentamen efter kursen
Tentamen i SG1140 Mekanik II för M, I. Problemtentamen
 2010-10-23 Tentamen i SG1140 Mekanik II för M, I. OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! KTH Mekanik 1. Problemtentamen Triangelskivan i den plana mekanismen i figuren har en vinkelhastighet
2010-10-23 Tentamen i SG1140 Mekanik II för M, I. OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! KTH Mekanik 1. Problemtentamen Triangelskivan i den plana mekanismen i figuren har en vinkelhastighet
Inre krafters resultanter
 KOMIHÅG 6: --------------------------------- Torr friktion: F " µn Normalkraftens angrepp?? Risk för glidning eller stjälpning ---------------------------------- Föreläsning 7: Inre krafters resultanter
KOMIHÅG 6: --------------------------------- Torr friktion: F " µn Normalkraftens angrepp?? Risk för glidning eller stjälpning ---------------------------------- Föreläsning 7: Inre krafters resultanter
Newtons 3:e lag: De par av krafter som uppstår tillsammans är av samma typ, men verkar på olika föremål.
 1 KOMIHÅG 8: --------------------------------- Hastighet: Cylinderkomponenter v = r e r + r" e " + z e z Naturliga komponenter v = ve t Acceleration: Cylinderkomponenter a = ( r " r# 2 )e r + ( r # + 2
1 KOMIHÅG 8: --------------------------------- Hastighet: Cylinderkomponenter v = r e r + r" e " + z e z Naturliga komponenter v = ve t Acceleration: Cylinderkomponenter a = ( r " r# 2 )e r + ( r # + 2
AB2.1: Grundläggande begrepp av vektoranalys
 AB2.1: Grundläggande begrepp av vektoranalys En vektor är en storhet som dels har icke-negativ storlek dels har riktning i rummet. Två vektorer a och b är lika, a = b, om de har samma storlek och samma
AB2.1: Grundläggande begrepp av vektoranalys En vektor är en storhet som dels har icke-negativ storlek dels har riktning i rummet. Två vektorer a och b är lika, a = b, om de har samma storlek och samma
Mekanik Föreläsning 8
 Mekanik Föreläsning 8 CBGA02, FYGA03, FYGA07 Jens Fjelstad 2010 02 19 1 / 16 Repetition Polära koordinater (r, θ): ange punkter i R 2 m h a r: avståndet från origo (0, 0) θ: vinkeln mot positiva x axeln
Mekanik Föreläsning 8 CBGA02, FYGA03, FYGA07 Jens Fjelstad 2010 02 19 1 / 16 Repetition Polära koordinater (r, θ): ange punkter i R 2 m h a r: avståndet från origo (0, 0) θ: vinkeln mot positiva x axeln
" e n Föreläsning 3: Typiska partikelrörelser och accelerationsriktningar
 KOMIHÅG 2: 1 Cylinderkomponenter: Hastighet v = r e r + r" e " + z e z Acceleration: a = ( r " r# 2 )e r + ( r # + 2 r # )e # + z e z Naturliga komponenter: v = ve t a = v e t + v 2 " e n ------------------------------------
KOMIHÅG 2: 1 Cylinderkomponenter: Hastighet v = r e r + r" e " + z e z Acceleration: a = ( r " r# 2 )e r + ( r # + 2 r # )e # + z e z Naturliga komponenter: v = ve t a = v e t + v 2 " e n ------------------------------------
Tentamen i SG1140 Mekanik II. Problemtentamen
 010-01-14 Tentamen i SG1140 Mekanik II KTH Mekanik 1. OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! Problemtentamen Triangelskivan i den plana mekanismen i figuren har en vinkelhastighet
010-01-14 Tentamen i SG1140 Mekanik II KTH Mekanik 1. OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! Problemtentamen Triangelskivan i den plana mekanismen i figuren har en vinkelhastighet
KUNGL TEKNISKA HÖGSKOLAN INSTITUTIONEN FÖR MEKANIK Richard Hsieh, Karl-Erik Thylwe
 Tentamen i SG1102 Mekanik, mindre kurs för Bio, Cmedt, Open Uppgifterna skall lämnas in på separata papper. Problemdelen. För varje uppgift ges högst 6 poäng. För godkänt fordras minst 8 poäng. Teoridelen.
Tentamen i SG1102 Mekanik, mindre kurs för Bio, Cmedt, Open Uppgifterna skall lämnas in på separata papper. Problemdelen. För varje uppgift ges högst 6 poäng. För godkänt fordras minst 8 poäng. Teoridelen.
Arbete och effekt vid rotation
 ˆ F rˆ Arbete och effekt vid rotation = Betrakta den masslösa staven med längden r och en partikel med massan m fastsatt i änden. Arbetet som kraften ሜF uträttar vid infinitesimal rotation d blir då: ds
ˆ F rˆ Arbete och effekt vid rotation = Betrakta den masslösa staven med längden r och en partikel med massan m fastsatt i änden. Arbetet som kraften ሜF uträttar vid infinitesimal rotation d blir då: ds
= v! p + r! p = r! p, ty v och p är dt parallella. Definiera som en ny storhet: Rörelsemängdsmoment: H O
 1 KOMIHÅG 15: --------------------------------- Definitioner: Den potentiella energin, mekaniska energin Formulera: Energiprincipen ---------------------------------- Föreläsning 16: FLER LAGAR-härledning
1 KOMIHÅG 15: --------------------------------- Definitioner: Den potentiella energin, mekaniska energin Formulera: Energiprincipen ---------------------------------- Föreläsning 16: FLER LAGAR-härledning
Hanno Essén Lagranges metod för en partikel
 Hanno Essén Lagranges metod för en partikel KTH MEKANIK STOCKHOLM 2004 1 Inledning Joseph Louis Lagrange (1763-1813) fann en metod som gör det möjligt att enkelt ta fram rörelseekvationerna för system
Hanno Essén Lagranges metod för en partikel KTH MEKANIK STOCKHOLM 2004 1 Inledning Joseph Louis Lagrange (1763-1813) fann en metod som gör det möjligt att enkelt ta fram rörelseekvationerna för system
Speciell relativitetsteori inlämningsuppgift 2
 Speciell relativitetsteori inlämningsuppgift 2 Christian von Schultz 2006 11 29 1 Tre satser Vi definierar en rumslik vektor A som en vektor som har A 2 < 0; en tidslik vektor har A 2 > 0 och en ljuslik
Speciell relativitetsteori inlämningsuppgift 2 Christian von Schultz 2006 11 29 1 Tre satser Vi definierar en rumslik vektor A som en vektor som har A 2 < 0; en tidslik vektor har A 2 > 0 och en ljuslik
Stelkroppsmekanik partiklar med fixa positioner relativt varandra
 Stelkroppsmekanik partiklar med fixa positioner relativt varandra Rörelse relativt mass centrum Allmänt partikelsystem Stel kropp translation + rotation (cirkelrörelse) För att kunna beskriva och förstå
Stelkroppsmekanik partiklar med fixa positioner relativt varandra Rörelse relativt mass centrum Allmänt partikelsystem Stel kropp translation + rotation (cirkelrörelse) För att kunna beskriva och förstå
" e n och Newtons 2:a lag
 KOMIHÅG 4: --------------------------------- 1 Energistorheter: P = F v, U "1 = t 1 # Pdt. Energilagar: Effektlagen, Arbetets lag ---------------------------------- Föreläsning 5: Tillämpning av energilagar
KOMIHÅG 4: --------------------------------- 1 Energistorheter: P = F v, U "1 = t 1 # Pdt. Energilagar: Effektlagen, Arbetets lag ---------------------------------- Föreläsning 5: Tillämpning av energilagar
Tentamen Mekanik F del 2 (FFM520)
") Tentamen Mekanik F del FFM50 Tid och plats: Måndagen den 3 maj 011 klockan 14.00-18.00 i V. Lösningsskiss: Christian Forssén Obligatorisk del 1. a 1 och är identiska vid ekvatorn. Centripetalaccelerationen
Tentamen Mekanik F del FFM50 Tid och plats: Måndagen den 3 maj 011 klockan 14.00-18.00 i V. Lösningsskiss: Christian Forssén Obligatorisk del 1. a 1 och är identiska vid ekvatorn. Centripetalaccelerationen
Härled utgående från hastighetssambandet för en stel kropp, d.v.s. v B = v A + ω AB
 . Härled utgående från hastighetssambandet för en stel kropp, d.v.s. v B v A + ω AB motsvarande samband för accelerationer: a B a A + ω ω AB + a AB. Tolka termerna i uttrycket för specialfallet plan rörelse
. Härled utgående från hastighetssambandet för en stel kropp, d.v.s. v B v A + ω AB motsvarande samband för accelerationer: a B a A + ω ω AB + a AB. Tolka termerna i uttrycket för specialfallet plan rörelse
Målsättningar Proffesionell kunskap. Kunna hänvisa till lagar och definitioner. Tydlighet och enhetliga beteckningar.
 1 Föreläsning 1: INTRODUKTION Målsättningar Proffesionell kunskap. Kunna hänvisa till lagar och definitioner. Tydlighet och enhetliga beteckningar. Kursens olika delar Teorin Tentamen efter kursen och/eller
1 Föreläsning 1: INTRODUKTION Målsättningar Proffesionell kunskap. Kunna hänvisa till lagar och definitioner. Tydlighet och enhetliga beteckningar. Kursens olika delar Teorin Tentamen efter kursen och/eller
Tentamen Mekanik MI, TMMI39, Ten 1
 Linköpings universitet tekniska högskolan IEI/mekanik Tentamen Mekanik MI, TMMI39, Ten 1 Torsdagen den 14 januari 2016, klockan 14 19 Kursadministratör Anna Wahlund, anna.wahlund@liu.se, 013-281157 Examinator
Linköpings universitet tekniska högskolan IEI/mekanik Tentamen Mekanik MI, TMMI39, Ten 1 Torsdagen den 14 januari 2016, klockan 14 19 Kursadministratör Anna Wahlund, anna.wahlund@liu.se, 013-281157 Examinator
Repetition, Matematik 2 för lärare. Ï x + 2y - 3z = 1 Ô Ì 3x - y + 2z = a Ô Á. . Beräkna ABT. Beräkna (AB) T
 T") Repetition, Matematik 2 för lärare Ï -2x + y + 2z = 3 1. Ange för alla reella a lösningsmängden till ekvationssystemet Ì ax + 2y + z = 1. Ó x + 3y - z = 4 2. Vad är villkoret på talet a för att ekvationssystemet
Repetition, Matematik 2 för lärare Ï -2x + y + 2z = 3 1. Ange för alla reella a lösningsmängden till ekvationssystemet Ì ax + 2y + z = 1. Ó x + 3y - z = 4 2. Vad är villkoret på talet a för att ekvationssystemet
GÖTEBORGS UNIVERSITET Institutionen för fysik LÖSNINGAR TILL TENTAMEN I MEKANIK B För FYP100, Fysikprogrammet termin 2
 GÖTEBORGS UNIVERSITET Institutionen för fysik LÖSNINGAR TILL TENTAMEN I MEKANIK B För FYP100, Fysikprogrammet termin Tid: Plats: Ansvarig: Hjälpmedel: Tisdag juni 009, kl 8 30 13 30 V-huset Lennart Sjögren,
GÖTEBORGS UNIVERSITET Institutionen för fysik LÖSNINGAR TILL TENTAMEN I MEKANIK B För FYP100, Fysikprogrammet termin Tid: Plats: Ansvarig: Hjälpmedel: Tisdag juni 009, kl 8 30 13 30 V-huset Lennart Sjögren,
Tentamen Mekanik MI, TMMI39, Ten 1
 Linköpings universitet tekniska högskolan IEI/mekanik Tentamen Mekanik MI, TMMI39, Ten Torsdagen den 9 april 205, klockan 4 9 Kursadministratör Anna Wahlund, anna.wahlund@liu.se, 03-2857 Examinator Joakim
Linköpings universitet tekniska högskolan IEI/mekanik Tentamen Mekanik MI, TMMI39, Ten Torsdagen den 9 april 205, klockan 4 9 Kursadministratör Anna Wahlund, anna.wahlund@liu.se, 03-2857 Examinator Joakim
KOMIHÅG 10: Effekt och arbete Effekt- och arbetslag Föreläsning 11: Arbete och lagrad (potentiell) energi
 energi") KOMIHÅG 10: Effekt och arbete Effekt- och arbetslag ----------------------------------------- Föreläsning 11: Arbete och lagrad (potentiell) energi Definition av arbete: U 0"1 = t 1 t 1 # Pdt = # F v dt,
KOMIHÅG 10: Effekt och arbete Effekt- och arbetslag ----------------------------------------- Föreläsning 11: Arbete och lagrad (potentiell) energi Definition av arbete: U 0"1 = t 1 t 1 # Pdt = # F v dt,
Tentamen i Mekanik SG1102, m. k OPEN. Problemtentamen
 014-06-04 Tentamen i Mekanik SG110, m. k OPEN. OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! KTH Mekanik 1. Problemtentamen En boll skjuts ut genom ett hål med en hastighet v så att den
014-06-04 Tentamen i Mekanik SG110, m. k OPEN. OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! KTH Mekanik 1. Problemtentamen En boll skjuts ut genom ett hål med en hastighet v så att den
Vektoranalys I. Anders Karlsson. Institutionen för elektro- och informationsteknik
 Vektoranalys I Anders Karlsson Institutionen för elektro- och informationsteknik 2 september 2015 Översikt över de tre föreläsningarna 1. Grundläggande begrepp inom vektoranalysen, nablaoperatorn samt
Vektoranalys I Anders Karlsson Institutionen för elektro- och informationsteknik 2 september 2015 Översikt över de tre föreläsningarna 1. Grundläggande begrepp inom vektoranalysen, nablaoperatorn samt
Tentamen Mekanik F del 2 (FFM520)
") Tentamen Mekanik F del 2 (FFM520) Tid och plats: Måndagen den 24 augusti 2009 klockan 08.30-12.30 i V. Lösningsskiss: Christian Forssén. Obligatorisk del 1. Rätt svarsalternativ på de sex frågorna är:
Tentamen Mekanik F del 2 (FFM520) Tid och plats: Måndagen den 24 augusti 2009 klockan 08.30-12.30 i V. Lösningsskiss: Christian Forssén. Obligatorisk del 1. Rätt svarsalternativ på de sex frågorna är:
LÖSNINGAR TENTAMEN MEKANIK II 1FA102
 LÖSNINGAR TENTAMEN 16-10-20 MEKANIK II 1FA102 A1 Skeppet Vidfamne 1 har en mast som är 11,5 m hög. Seglet är i överkant fäst i en rå (en stång av trä, ungefär horisontell vid segling). För att kontrollera
LÖSNINGAR TENTAMEN 16-10-20 MEKANIK II 1FA102 A1 Skeppet Vidfamne 1 har en mast som är 11,5 m hög. Seglet är i överkant fäst i en rå (en stång av trä, ungefär horisontell vid segling). För att kontrollera
9.2 Kinetik Allmän plan rörelse Ledningar
 9.2 Kinetik Allmän plan rörelse Ledningar 9.43 b) Villkor för att linan inte skall glida ges av ekv (4.1.6). 9.45 Ställ upp grundekvationerna, ekv (9.2.1) + (9.2.4), för trådrullen. I momentekvationen,
9.2 Kinetik Allmän plan rörelse Ledningar 9.43 b) Villkor för att linan inte skall glida ges av ekv (4.1.6). 9.45 Ställ upp grundekvationerna, ekv (9.2.1) + (9.2.4), för trådrullen. I momentekvationen,
Tentamen i Mekanik SG1130, baskurs P1. Problemtentamen
 010-06-07 Tentamen i Mekanik SG1130, baskurs P1 OBS: Inga hjälpmede förutom rit- och skrivdon får användas! KTH Mekanik 1 Problemtentamen En homogen mast med massan M och längden 10a hålls stående i vertikalt
010-06-07 Tentamen i Mekanik SG1130, baskurs P1 OBS: Inga hjälpmede förutom rit- och skrivdon får användas! KTH Mekanik 1 Problemtentamen En homogen mast med massan M och längden 10a hålls stående i vertikalt
Om den lagen (N2) är sann så är det också sant att: r " p = r " F (1)
 är sann så är det också sant att: r p = r F (1)") 1 KOMIHÅG 12: --------------------------------- Den mekaniska energin, arbetet ---------------------------------- Föreläsning 13: FLER LAGAR-härledning ur N2 Momentlag Hur påverkas rörelsen av ett kraftmoment??
1 KOMIHÅG 12: --------------------------------- Den mekaniska energin, arbetet ---------------------------------- Föreläsning 13: FLER LAGAR-härledning ur N2 Momentlag Hur påverkas rörelsen av ett kraftmoment??
Målsättningar Proffesionell kunskap om mekanik. Kunna hänvisa till lagar och definitioner. Tydlighet och enhetliga beteckningar.
 1 Föreläsning 1: INTRODUKTION Målsättningar Proffesionell kunskap om mekanik. Kunna hänvisa till lagar och definitioner. Tydlighet och enhetliga beteckningar. Kursens olika delar Teorin Tentamen efter
1 Föreläsning 1: INTRODUKTION Målsättningar Proffesionell kunskap om mekanik. Kunna hänvisa till lagar och definitioner. Tydlighet och enhetliga beteckningar. Kursens olika delar Teorin Tentamen efter
.4-6, 8, , 12.10, 13} Kinematik Kinetik Kraftmoment Vektorbeskrivning Planetrörelse
 .4-6, 8, 12.5-6, 12.10, 13} Kinematik Kinetik Kraftmoment Vektorbeskrivning Planetrörelse Exempel på roterande koordinatsystem planpolära eller cylindriska koordinater Storhet Beteckning Enhet Fysikalisk
.4-6, 8, 12.5-6, 12.10, 13} Kinematik Kinetik Kraftmoment Vektorbeskrivning Planetrörelse Exempel på roterande koordinatsystem planpolära eller cylindriska koordinater Storhet Beteckning Enhet Fysikalisk
Beräkningsuppgift I. Rörelseekvationer och kinematiska ekvationer
 1 Beräkningsuppgift I Vi skall studera ett flygplan som rör sig i xz planet, dvs vi har med de frihetsgrader som brukar kallas de longitudinella. Vi har ett koordinatsystem Oxyz fast i flygplanet och ett
1 Beräkningsuppgift I Vi skall studera ett flygplan som rör sig i xz planet, dvs vi har med de frihetsgrader som brukar kallas de longitudinella. Vi har ett koordinatsystem Oxyz fast i flygplanet och ett
Problemtentamen. = (3,4,5)P, r 1. = (0,2,1)a F 2. = (0,0,0)a F 3. = (2,"3,4)P, r 2
P, r 1. = (0,2,1)a F 2. = (0,0,0)a F 3. = (2,3,4)P, r 2") 2015-MM-DD Övningstentamen i Mekanik SG1130, grundkurs B1. OBS: Inga hjälpmede förutom rit- och skrivdon får användas! KTH Mekanik 1. Problemtentamen Ett kraftsystem består av tre krafter som angriper
2015-MM-DD Övningstentamen i Mekanik SG1130, grundkurs B1. OBS: Inga hjälpmede förutom rit- och skrivdon får användas! KTH Mekanik 1. Problemtentamen Ett kraftsystem består av tre krafter som angriper
NEWTONS 3 LAGAR för partiklar
 wkomihåg 12: Acceleration-med olika komponenter. ----------------------------------------- Föreläsning 13: Dynamik kraft-rörelse (orsakverkan) NEWTONS 3 LAGAR för partiklar 1 1. En 'fri' partikel förblir
wkomihåg 12: Acceleration-med olika komponenter. ----------------------------------------- Föreläsning 13: Dynamik kraft-rörelse (orsakverkan) NEWTONS 3 LAGAR för partiklar 1 1. En 'fri' partikel förblir
. b. x + 2 y 3 z = 1 3 x y + 2 z = a x 5 y + 8 z = 1 lösning?
 Repetition, Matematik 2, linjär algebra 10 Lös ekvationssystemet 5 x + 2 y + 2 z = 7 a x y + 3 z = 8 3 x y 3 z = 2 b 11 Ange för alla reella a lösningsmängden till ekvationssystemet 2 x + 3 y z = 3 x 2
Repetition, Matematik 2, linjär algebra 10 Lös ekvationssystemet 5 x + 2 y + 2 z = 7 a x y + 3 z = 8 3 x y 3 z = 2 b 11 Ange för alla reella a lösningsmängden till ekvationssystemet 2 x + 3 y z = 3 x 2
LEDNINGAR TILL PROBLEM I KAPITEL 14. Kroppen har en rotationshastighet. Kulan P beskriver en cirkelrörelse. För ren rotation gäller
 LEDNINR TILL ROBLEM I KITEL 4 L 4. Kroppen har en rotationshastighet. Kulan beskriver en cirkelrörelse. För ren rotation gäller v = r v = 5be O t Eftersom och r O är vinkelräta bestäms storleken av kryssprodukten
LEDNINR TILL ROBLEM I KITEL 4 L 4. Kroppen har en rotationshastighet. Kulan beskriver en cirkelrörelse. För ren rotation gäller v = r v = 5be O t Eftersom och r O är vinkelräta bestäms storleken av kryssprodukten
Mer Friktion jämviktsvillkor
 KOMIHÅG 6: --------------------------------- Torr friktion: F! µn. Viskös friktion: F = "cv. Extra villkor för jämvikt: risk för glidning eller stjälpning. ---------------------------------- Föreläsning
KOMIHÅG 6: --------------------------------- Torr friktion: F! µn. Viskös friktion: F = "cv. Extra villkor för jämvikt: risk för glidning eller stjälpning. ---------------------------------- Föreläsning
KOMIHÅG 12: Ekvation för fri dämpad svängning: x + 2"# n
 KOMIHÅG 1: ------------------------------------------------------ Ekvation för fri dämpad svängning: x + "# n x + # n x = a, Tre typer av dämpning: Svag, kritisk och stark. 1 ------------------------------------------------------
KOMIHÅG 1: ------------------------------------------------------ Ekvation för fri dämpad svängning: x + "# n x + # n x = a, Tre typer av dämpning: Svag, kritisk och stark. 1 ------------------------------------------------------
Lösningsskiss för tentamen Mekanik F del 2 (FFM521/520)
") Lösningsskiss för tentamen Mekanik F del 2 (FFM521/520) Tid och plats: Tisdagen den juni 2014 klockan 08.0-12.0 i M-huset. Lösningsskiss: Christian Forssén Obligatorisk del 1. Ren summering över de fyra
Lösningsskiss för tentamen Mekanik F del 2 (FFM521/520) Tid och plats: Tisdagen den juni 2014 klockan 08.0-12.0 i M-huset. Lösningsskiss: Christian Forssén Obligatorisk del 1. Ren summering över de fyra
FÖRBEREDELSER INFÖR DELTENTAMEN OCH TENTAMEN
 FÖRBEREDELSER INFÖR DELTENTAMEN OCH TENTAMEN Repetera de övningsuppgifter som kännts besvärliga. Om du behöver mera övning så kan du välja fritt bland de övningsuppgifter i Problemsamlingen som överhoppats.
FÖRBEREDELSER INFÖR DELTENTAMEN OCH TENTAMEN Repetera de övningsuppgifter som kännts besvärliga. Om du behöver mera övning så kan du välja fritt bland de övningsuppgifter i Problemsamlingen som överhoppats.
Kursinformation Mekanik f.k. TMMI39
 Kursinformation Mekanik f.k. TMMI39 Uppdaterad 202--26 Linköpings universitet tekniska högskolan IEI/mekanik Joakim Holmberg Omfång 30 h föreläsningar och 24 h lektioner i period HT2, hösten 202. Kursansvarig,
Kursinformation Mekanik f.k. TMMI39 Uppdaterad 202--26 Linköpings universitet tekniska högskolan IEI/mekanik Joakim Holmberg Omfång 30 h föreläsningar och 24 h lektioner i period HT2, hösten 202. Kursansvarig,
Tentamen i Mekanik SG1102, m. k OPEN m fl. Problemtentamen OBS: Inga hjälpmedel förutom rit- och skrivdon får användas!
 014-08-19 Tentamen i Mekanik SG110, m. k OPEN m fl. OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! KTH Mekanik Problemtentamen 1. En boll med massa m skjuts ut ur ett hål så att den hamnar
014-08-19 Tentamen i Mekanik SG110, m. k OPEN m fl. OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! KTH Mekanik Problemtentamen 1. En boll med massa m skjuts ut ur ett hål så att den hamnar
GÖTEBORGS UNIVERSITET Institutionen för fysik LÖSNINGAR TILL TENTAMEN I MEKANIK B För FYP100, Fysikprogrammet termin 2
 GÖTEBORGS UNIVERSITET Institutionen för fysik LÖSNINGAR TILL TENTAMEN I MEKANIK B För FYP00, Fysikprogrammet termin 2 Tid: Plats: Ansvarig: Hjälpmedel: Lödag 29 maj 200, kl 8 30 3 30 V-huset Lennart Sjögren,
GÖTEBORGS UNIVERSITET Institutionen för fysik LÖSNINGAR TILL TENTAMEN I MEKANIK B För FYP00, Fysikprogrammet termin 2 Tid: Plats: Ansvarig: Hjälpmedel: Lödag 29 maj 200, kl 8 30 3 30 V-huset Lennart Sjögren,
Vektorer. 1. Vektorer - definition och räkneoperationer F H
 Vektorer Detta material bygger på valda och delvis omarbetade delar av kompendiet Vektoralgebra av Hasse Carlsson. Dessutom har ett helt nyskrivet avsnitt om strömtriangeln lagts in. Inledning Du är säkert
Vektorer Detta material bygger på valda och delvis omarbetade delar av kompendiet Vektoralgebra av Hasse Carlsson. Dessutom har ett helt nyskrivet avsnitt om strömtriangeln lagts in. Inledning Du är säkert
Vektorgeometri. En inledning Hasse Carlsson
 Vektorgeometri En inledning Hasse Carlsson Matematiska institutionen Göteborgs universitet och Chalmers tekniska högskola Version 01 Innehåll 1 Inledning Geometriska vektorer.1 Definition av vektorer........................
Vektorgeometri En inledning Hasse Carlsson Matematiska institutionen Göteborgs universitet och Chalmers tekniska högskola Version 01 Innehåll 1 Inledning Geometriska vektorer.1 Definition av vektorer........................
6.3 Partikelns kinetik - Härledda lagar Ledningar
 6.3 Partikelns kinetik - Härledda lagar Ledningar 6.104 Om du inte tidigare gått igenom illustrationsexempel 6.3.3, gör det först. Låt ϕ vara vinkeln mellan radien till kroppen och vertikalen (det vill
6.3 Partikelns kinetik - Härledda lagar Ledningar 6.104 Om du inte tidigare gått igenom illustrationsexempel 6.3.3, gör det först. Låt ϕ vara vinkeln mellan radien till kroppen och vertikalen (det vill
6.2 Partikelns kinetik - Tillämpningar Ledningar
 6.2 Partikelns kinetik - Tillämpningar Ledningar 6.13 Det som känns som barnets tyngd är den uppåtriktade kraft F som mannen påverkar barnet med. Denna fås ur Newton 2 för barnet. Svar i kilogram måste
6.2 Partikelns kinetik - Tillämpningar Ledningar 6.13 Det som känns som barnets tyngd är den uppåtriktade kraft F som mannen påverkar barnet med. Denna fås ur Newton 2 för barnet. Svar i kilogram måste
Laboration: Roterande Referenssystem
 INSTITUTIONEN FöR FYSIK OCH ASTRONOMI Laboration: Roterande Referenssystem Laborationsinstruktionen innehåller teori, diskussioner och beskrivningar av de experiment som ska göras. Mål: Att få erfarenhet
INSTITUTIONEN FöR FYSIK OCH ASTRONOMI Laboration: Roterande Referenssystem Laborationsinstruktionen innehåller teori, diskussioner och beskrivningar av de experiment som ska göras. Mål: Att få erfarenhet
Vektorgeometri för gymnasister
 Vektorgeometri för gymnasister Per-Anders Svensson http://homepage.lnu.se/staff/psvmsi/vektorgeometri/gymnasiet.html Fakulteten för teknik Linnéuniversitetet Räta linjens och planets ekvationer I Innehåll
Vektorgeometri för gymnasister Per-Anders Svensson http://homepage.lnu.se/staff/psvmsi/vektorgeometri/gymnasiet.html Fakulteten för teknik Linnéuniversitetet Räta linjens och planets ekvationer I Innehåll
Mekanik FK2002m. Kinematik i flera dimensioner
 Mekanik FK2002m Föreläsning 3 Kinematik i flera dimensioner 2013-09-04 Sara Strandberg SARA STRANDBERG P. 1 FÖRELÄSNING 2 Introduktion Nu har vi gått igenom: - Kinematik i en dimension - Vektorer i två
Mekanik FK2002m Föreläsning 3 Kinematik i flera dimensioner 2013-09-04 Sara Strandberg SARA STRANDBERG P. 1 FÖRELÄSNING 2 Introduktion Nu har vi gått igenom: - Kinematik i en dimension - Vektorer i två
Moment 4.2.1, 4.2.2, 4.2.3, Viktiga exempel 4.1, 4.3, 4.4, 4.5, 4.6, 4.13, 4.14 Övningsuppgifter 4.1 a-h, 4.2, 4.3, 4.4, 4.5, 4.
 Moment 4.2.1, 4.2.2, 4.2., 4.2.4 Viktiga exempel 4.1, 4., 4.4, 4.5, 4.6, 4.1, 4.14 Övningsuppgifter 4.1 a-h, 4.2, 4., 4.4, 4.5, 4.7 Många av de objekt man arbetar med i matematiken och naturvetenskapen
Moment 4.2.1, 4.2.2, 4.2., 4.2.4 Viktiga exempel 4.1, 4., 4.4, 4.5, 4.6, 4.1, 4.14 Övningsuppgifter 4.1 a-h, 4.2, 4., 4.4, 4.5, 4.7 Många av de objekt man arbetar med i matematiken och naturvetenskapen
Studiehandledning till. MAA123 Grundläggande vektoralgebra
 Studiehandledning till MAA13 Grundläggande vektoralgebra vid kurstillfället i period 4 läsåret 013/14 Version 014-05- Information om kursen MAA13 Avsikt Avsikten med kursen MAA13 Grundläggande vektoralgebra
Studiehandledning till MAA13 Grundläggande vektoralgebra vid kurstillfället i period 4 läsåret 013/14 Version 014-05- Information om kursen MAA13 Avsikt Avsikten med kursen MAA13 Grundläggande vektoralgebra
Facit/lösningsförslag
 Facit/lösningsförslag 06-08- Låt l vara linjen med parameterform x, y, z 0 s, mellan planet x y z och planet z 0 och låt l vara skärningslinjen a) Skriv l på parameterform b) Beräkna avståndet mellan l
Facit/lösningsförslag 06-08- Låt l vara linjen med parameterform x, y, z 0 s, mellan planet x y z och planet z 0 och låt l vara skärningslinjen a) Skriv l på parameterform b) Beräkna avståndet mellan l
SF1626 Flervariabelanalys Lösningsförslag till tentamen DEL A
 SF1626 Flervariabelanalys Lösningsförslag till tentamen 216-6-7 DEL A 1. Låt S vara ellipsoiden som ges av ekvationen x 2 + 2y 2 + 3z 2 = 5. (a) Bestäm en normalvektor till S i en punkt (x, y, z ) på S.
SF1626 Flervariabelanalys Lösningsförslag till tentamen 216-6-7 DEL A 1. Låt S vara ellipsoiden som ges av ekvationen x 2 + 2y 2 + 3z 2 = 5. (a) Bestäm en normalvektor till S i en punkt (x, y, z ) på S.
1 Vektorer i koordinatsystem
 1 Vektorer i koordinatsystem Ex 11 Givet ett koordinatsystem i R y a 4 b x Punkten A = (3, ) och ortsvektorn a = (3, ) och punkten B = (5, 1) och ortsvsektorn b = (5, 1) uttrycks på samma sätt, som en
1 Vektorer i koordinatsystem Ex 11 Givet ett koordinatsystem i R y a 4 b x Punkten A = (3, ) och ortsvektorn a = (3, ) och punkten B = (5, 1) och ortsvsektorn b = (5, 1) uttrycks på samma sätt, som en
Kapitel extra Tröghetsmoment
 et betecknas med I eller J används för att beskriva stela kroppars dynamik har samma roll i rotationsrörelser som massa har för translationsrörelser Innebär systemets tröghet när det gäller att ändra rotationshastigheten
et betecknas med I eller J används för att beskriva stela kroppars dynamik har samma roll i rotationsrörelser som massa har för translationsrörelser Innebär systemets tröghet när det gäller att ändra rotationshastigheten
FFM234, Klassisk fysik och vektorfält - Föreläsningsanteckningar
 FFM234, Klassisk fysik och vektorfält - Föreläsningsanteckningar hristian Forssén, Institutionen för fysik, halmers, Göteborg, verige ep 6, 217 3. Integraler Det mesta av detta material förutsätts vara
FFM234, Klassisk fysik och vektorfält - Föreläsningsanteckningar hristian Forssén, Institutionen för fysik, halmers, Göteborg, verige ep 6, 217 3. Integraler Det mesta av detta material förutsätts vara
October 9, Innehållsregister
 October 9, 017 Innehållsregister 1 Vektorer 1 1.1 Geometrisk vektor............................... 1 1. Vektor och koordinatsystem.......................... 1 1.3 Skalär produkt (dot eller inner product)...................
October 9, 017 Innehållsregister 1 Vektorer 1 1.1 Geometrisk vektor............................... 1 1. Vektor och koordinatsystem.......................... 1 1.3 Skalär produkt (dot eller inner product)...................
8 RELATIV RÖRELSE Inledning. Relativ rörelse 8 1
 Relativ rörelse 8 1 8 RELATIV RÖRELSE 1 8.1 Inledning Den grundläggande lagen i den klassiska mekaniken är Newtons accelerationslag ma = F Som Newton själv noterade finns det en fundamental svårighet gömd
Relativ rörelse 8 1 8 RELATIV RÖRELSE 1 8.1 Inledning Den grundläggande lagen i den klassiska mekaniken är Newtons accelerationslag ma = F Som Newton själv noterade finns det en fundamental svårighet gömd
SF1626 Flervariabelanalys
 1 / 28 SF1626 Flervariabelanalys Föreläsning 2 Hans Thunberg Institutionen för matematik, KTH VT 2018, Period 4 2 / 28 SF1626 Flervariabelanalys Dagens lektion: avsnitt 11.1 11.3 Funktioner från R till
1 / 28 SF1626 Flervariabelanalys Föreläsning 2 Hans Thunberg Institutionen för matematik, KTH VT 2018, Period 4 2 / 28 SF1626 Flervariabelanalys Dagens lektion: avsnitt 11.1 11.3 Funktioner från R till
Föreläsning 5, clickers
 Föreläsning 5, clickers Gungbrädan 1 kg 2 kg A. Kommer att tippa åt höger B. Kommer att tippa åt vänster ⱱ C. Väger jämnt I en kastparabel A. är accelerationen störst alldeles efter uppkastet B. är accelerationen
Föreläsning 5, clickers Gungbrädan 1 kg 2 kg A. Kommer att tippa åt höger B. Kommer att tippa åt vänster ⱱ C. Väger jämnt I en kastparabel A. är accelerationen störst alldeles efter uppkastet B. är accelerationen
Repetition Mekanik, grundkurs
 Repetition Mekanik, grundkurs Kraft är en vektor och beskrivs med storlek riktning och angreppspunkt F= Fe + F e + Fe x x y y z z Kraften kan flytta längs sin verkninglinje Addera krafter Moment i planet
Repetition Mekanik, grundkurs Kraft är en vektor och beskrivs med storlek riktning och angreppspunkt F= Fe + F e + Fe x x y y z z Kraften kan flytta längs sin verkninglinje Addera krafter Moment i planet
Sidor i boken Figur 1: Sträckor
 Sidor i boken 37-39 Vektorer Det vi ska studera här är bara en liten del av den teori du kommer att stifta bekantskap med i dina fortsatta studier i kursen Linjär algebra. Många av de objekt man arbetar
Sidor i boken 37-39 Vektorer Det vi ska studera här är bara en liten del av den teori du kommer att stifta bekantskap med i dina fortsatta studier i kursen Linjär algebra. Många av de objekt man arbetar
Uppgift 3.5. Vi har att: a = dv dt enligt definitionen. Med vårt uttryck blir detta: Vi separerar variablerna: Vi kan nu integrera båda leden: Z dv
 Uppgift 3.5 a) Vi har att: a = dv enligt definitionen. Med vårt uttryck blir detta: Vi separerar variablerna: Vi kan nu integrera båda leden: dv v 2 = dv = dv v 2 = k kv2 k, v = kt + C där C är en konstant
Uppgift 3.5 a) Vi har att: a = dv enligt definitionen. Med vårt uttryck blir detta: Vi separerar variablerna: Vi kan nu integrera båda leden: dv v 2 = dv = dv v 2 = k kv2 k, v = kt + C där C är en konstant
Tentamen Mekanik F del 2 (FFM521 och 520)
") Tentamen Mekanik F del 2 (FFM521 och 520) Tid och plats: Tisdagen den 27 augusti 2013 klockan 14.00-18.00. Lösningsskiss: Christian Forssén Obligatorisk del 1. Lösningsskiss Använd arbete-energi principen.
Tentamen Mekanik F del 2 (FFM521 och 520) Tid och plats: Tisdagen den 27 augusti 2013 klockan 14.00-18.00. Lösningsskiss: Christian Forssén Obligatorisk del 1. Lösningsskiss Använd arbete-energi principen.
Tentamen i Mekanik SG1102, m. k OPEN. Problemtentamen
 2015-06-01 Tentamen i Mekanik SG1102, m. k OPEN OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! KTH Mekanik Problemtentamen 1. En bil med massan m kör ett varv med konstant fartökning ( v
2015-06-01 Tentamen i Mekanik SG1102, m. k OPEN OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! KTH Mekanik Problemtentamen 1. En bil med massan m kör ett varv med konstant fartökning ( v
Om ellipsen och hyperbelns optiska egenskaper
 Om ellipsen och hyperbelns optiska egenskaper Anders Källén MatematikCentrum LTH anderskallen@gmail.com Sammanfattning Ellipser och hyperbler är, liksom parabeln, s.k. kägelsnitt, dvs kurvor som uppkommer
Om ellipsen och hyperbelns optiska egenskaper Anders Källén MatematikCentrum LTH anderskallen@gmail.com Sammanfattning Ellipser och hyperbler är, liksom parabeln, s.k. kägelsnitt, dvs kurvor som uppkommer
Tid läge och accelera.on
 Tid läge och accelera.on Tid t Läge x = x(t) Hastighet v(t) = dx dt x(t) = Acceleration a(t) = dv dt v(t) = t t0 v(t)dt t t 0 a(t)dt Eq 1 Eq 2 Eq 3 MEN KOM IHÅG: 1. För a> de>a skall vara användbart måste.dsberoendet
Tid läge och accelera.on Tid t Läge x = x(t) Hastighet v(t) = dx dt x(t) = Acceleration a(t) = dv dt v(t) = t t0 v(t)dt t t 0 a(t)dt Eq 1 Eq 2 Eq 3 MEN KOM IHÅG: 1. För a> de>a skall vara användbart måste.dsberoendet
Tentamen Mekanik F del 2 (FFM520)
") Tentamen Mekanik F del 2 (FFM520) Tid och plats: Lördagen den 1 september 2012 klockan 08.30-12.30 i M. Hjälpmedel: Physics Handbook, Beta, Typgodkänd miniräknare samt en egenhändigt skriven A4 med valfritt
Tentamen Mekanik F del 2 (FFM520) Tid och plats: Lördagen den 1 september 2012 klockan 08.30-12.30 i M. Hjälpmedel: Physics Handbook, Beta, Typgodkänd miniräknare samt en egenhändigt skriven A4 med valfritt
SF1626 Flervariabelanalys Tentamen Tisdagen den 7 juni 2016
 Institutionen för matematik SF1626 Flervariabelanalys Tentamen Tisdagen den 7 juni 216 Skrivtid: 8:-13: Tillåtna hjälpmedel: inga Examinator: Mats Boij Tentamen består av nio uppgifter som vardera ger
Institutionen för matematik SF1626 Flervariabelanalys Tentamen Tisdagen den 7 juni 216 Skrivtid: 8:-13: Tillåtna hjälpmedel: inga Examinator: Mats Boij Tentamen består av nio uppgifter som vardera ger
Relativitetsteori, introduktion
 Relativitetsteori, introduktion En av bristerna med den klassiska fysiken är att alla observatörer antas ha samma tidsuppfattning, oavsett sin egen rörelse. Einstein kunde visa att så inte kunde vara fallet.
Relativitetsteori, introduktion En av bristerna med den klassiska fysiken är att alla observatörer antas ha samma tidsuppfattning, oavsett sin egen rörelse. Einstein kunde visa att så inte kunde vara fallet.
Tentamen Mekanik F del 2 (FFM521 och 520)
") Tentamen Mekanik F del 2 (FFM521 och 520) Tid och plats: Tisdagen den 27 augusti 2013 klockan 14.00-18.00. Hjälpmedel: Physics Handbook, Beta samt en egenhändigt handskriven A4 med valfritt innehåll (bägge
Tentamen Mekanik F del 2 (FFM521 och 520) Tid och plats: Tisdagen den 27 augusti 2013 klockan 14.00-18.00. Hjälpmedel: Physics Handbook, Beta samt en egenhändigt handskriven A4 med valfritt innehåll (bägge
Tentamen i Mekanik SG1130, baskurs P1 m fl. Problemtentamen OBS: Inga hjälpmedel förutom rit- och skrivdon får användas!
 014-03-17 Tentamen i Mekanik SG1130, baskurs P1 m fl OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! 1 KTH Mekanik Problemtentamen En tunn homogen stav i jämvikt med massan m har i ena ändpunkten
014-03-17 Tentamen i Mekanik SG1130, baskurs P1 m fl OBS: Inga hjälpmedel förutom rit- och skrivdon får användas! 1 KTH Mekanik Problemtentamen En tunn homogen stav i jämvikt med massan m har i ena ändpunkten
SG1108 Tillämpad fysik, mekanik för ME1 (7,5 hp)
") Läsåret 11/12 Utförliga lärandemål SG1108 Tillämpad fysik, mekanik för ME1 (7,5 hp) Richard Hsieh Huvudsakligt innehåll: Vektoralgebra och dimensionsbetraktelser. Kraft och kraftmoment. Kraftsystem; kraftpar,
Läsåret 11/12 Utförliga lärandemål SG1108 Tillämpad fysik, mekanik för ME1 (7,5 hp) Richard Hsieh Huvudsakligt innehåll: Vektoralgebra och dimensionsbetraktelser. Kraft och kraftmoment. Kraftsystem; kraftpar,
LEDNINGAR TILL PROBLEM I KAPITEL 4
 LEDNINAR TILL PROBLEM I KAPITEL 4 LP 4.3 Tyngdkraften, normalkraften och friktionskraften verkar på lådan. Antag att normalkraftens angreppspunkt är på avståndet x från lådans nedre vänstra hörn. Kraftekvationen
LEDNINAR TILL PROBLEM I KAPITEL 4 LP 4.3 Tyngdkraften, normalkraften och friktionskraften verkar på lådan. Antag att normalkraftens angreppspunkt är på avståndet x från lådans nedre vänstra hörn. Kraftekvationen
Räta linjer i 3D-rummet: Låt L vara den räta linjen genom som är parallell med
 RÄTA LINJER OCH PLAN Räta linjer i 3D-rummet: Låt L vara den räta linjen genom punkten P = ( x, y, som är parallell med vektorn v = v, v, v ) 0. ( 3 P Räta linjens ekvation på parameterform kan man ange
RÄTA LINJER OCH PLAN Räta linjer i 3D-rummet: Låt L vara den räta linjen genom punkten P = ( x, y, som är parallell med vektorn v = v, v, v ) 0. ( 3 P Räta linjens ekvation på parameterform kan man ange
Tentamen i Mekanik SG1102, m. k OPEN. Problemtentamen
 2015-06-01 Tentamen i Mekanik SG1102, m. k OPEN OBS: Inga hjälpmedel förutom rit- och skrivdon får användas KTH Mekanik Problemtentamen 1. En bil med massan m kör ett varv med konstant fartökning ( v =)
2015-06-01 Tentamen i Mekanik SG1102, m. k OPEN OBS: Inga hjälpmedel förutom rit- och skrivdon får användas KTH Mekanik Problemtentamen 1. En bil med massan m kör ett varv med konstant fartökning ( v =)
ORTONORMERADE BASER I PLAN (2D) OCH RUMMET (3D) ORTONORMERAT KOORDINAT SYSTEM
 OCH RUMMET (3D) ORTONORMERAT KOORDINAT SYSTEM") RTNRMERADE BASER I PLAN (D) CH RUMMET (D) RTNRMERAT KRDINAT SYSTEM Vi säger att en bas i rummet e x e e z följande villkor är uppfllda: ( e x e i plan) är en ortonormerad bas om basvektorerna är parvis
RTNRMERADE BASER I PLAN (D) CH RUMMET (D) RTNRMERAT KRDINAT SYSTEM Vi säger att en bas i rummet e x e e z följande villkor är uppfllda: ( e x e i plan) är en ortonormerad bas om basvektorerna är parvis
II. Partikelkinetik {RK 5,6,7}
 II. Partikelkinetik {RK 5,6,7} med kraft att beräkna och förstå Newtons lagar och kraftbegreppet är mycket viktiga för att beskriva och förstå rörelse Kenneth Järrendahl, 1: Tröghetslagen Newtons Lagar
II. Partikelkinetik {RK 5,6,7} med kraft att beräkna och förstå Newtons lagar och kraftbegreppet är mycket viktiga för att beskriva och förstå rörelse Kenneth Järrendahl, 1: Tröghetslagen Newtons Lagar
Matematikuppgifter del II, FYTA11
 Matematikuppgifter del II, FYTA11 51. Lös uppgift 10.1 i boken. 52. Lös uppgift 10.2 i boken. 53. Lös uppgift 10.3 i boken. 54. Lös uppgift 10.4 i boken. 55. Låt en kurva i rummet vara given i parametrisk
Matematikuppgifter del II, FYTA11 51. Lös uppgift 10.1 i boken. 52. Lös uppgift 10.2 i boken. 53. Lös uppgift 10.3 i boken. 54. Lös uppgift 10.4 i boken. 55. Låt en kurva i rummet vara given i parametrisk
Modul 1: Komplexa tal och Polynomekvationer
 Modul : Komplexa tal och Polynomekvationer. Skriv på formen a + bi, där a och b är reella, a. (2 + i)( 2i) 2. b. + 2i + 3i 3 4i + 2i 2. Lös ekvationerna a. (2 i)z = 3 + i. b. (2 + i) z = + 3i c. ( 2 +
Modul : Komplexa tal och Polynomekvationer. Skriv på formen a + bi, där a och b är reella, a. (2 + i)( 2i) 2. b. + 2i + 3i 3 4i + 2i 2. Lös ekvationerna a. (2 i)z = 3 + i. b. (2 + i) z = + 3i c. ( 2 +
September 13, Vektorer En riktad sträcka P Q, där P Q, är en pil med foten i P och med spetsen i Q. Denna har. (i) en riktning, och
 en riktning, och") Fö : September 3, 205 Vektorer En riktad sträcka P Q, där P Q, är en pil med foten i P och med spetsen i Q. Denna har i en riktning, och ii en nollskild längd betecknad P Q. Man använder riktade sträckor
Fö : September 3, 205 Vektorer En riktad sträcka P Q, där P Q, är en pil med foten i P och med spetsen i Q. Denna har i en riktning, och ii en nollskild längd betecknad P Q. Man använder riktade sträckor
1. Beräkna hastigheten, farten och accelerationen vid tiden t för en partikel vars rörelse beskrivs av r(t) = (2 sin t + cos t, 2 cos t sin t, 2t).
 = (2 sin t + cos t, 2 cos t sin t, 2t).") Repetition, analys.. Beräkna hastigheten, farten och accelerationen vid tiden t för en partikel vars rörelse beskrivs av r(t) = (2 sin t + cos t, 2 cos t sin t, 2t). 2. Beräkna längden av kurvan r(t) =
Repetition, analys.. Beräkna hastigheten, farten och accelerationen vid tiden t för en partikel vars rörelse beskrivs av r(t) = (2 sin t + cos t, 2 cos t sin t, 2t). 2. Beräkna längden av kurvan r(t) =
x +y +z = 2 2x +y = 3 y +2z = 1 x = 1 + t y = 1 2t z = t 3x 2 + 3y 2 y = 0 y = x2 y 2.
 Lösningar till tentamen i Inledande matematik för M/TD, TMV155/175 Tid: 2006-10-27, kl 08.30-12.30 Hjälpmedel: Inga Betygsgränser, ev bonuspoäng inräknad: 20-29 p. ger betyget 3, 30-39 p. ger betyget 4
Lösningar till tentamen i Inledande matematik för M/TD, TMV155/175 Tid: 2006-10-27, kl 08.30-12.30 Hjälpmedel: Inga Betygsgränser, ev bonuspoäng inräknad: 20-29 p. ger betyget 3, 30-39 p. ger betyget 4
Betygsgränser: För betyg. Vem som har. Hjälpmedel: av papperet. Uppgift. 1. (4p) 0. (2p) 3 (2p) Uppgift. 2. (4p) B-2C om. vektor A (1p) b) Bestäm k så
 0. (2p) 3 (2p) Uppgift. 2. (4p) B-2C om. vektor A (1p) b) Bestäm k så") Kurs: HF90 Matematik, Moment TEN (Linjär Algebra) ) Datum: 4 augusti 08 Skrivtid 08:00 :000 Examinator: Armin Halilovic För godkänt betyg krävss 0 av maxx 4 poäng. Betygsgränser: För betyg A, B, C, D,
Kurs: HF90 Matematik, Moment TEN (Linjär Algebra) ) Datum: 4 augusti 08 Skrivtid 08:00 :000 Examinator: Armin Halilovic För godkänt betyg krävss 0 av maxx 4 poäng. Betygsgränser: För betyg A, B, C, D,
AKTIVITETER VID POWERPARK/HÄRMÄ
 AKTIVITETER VID POWERPARK/HÄRMÄ Acceleration Mega Drop Fritt fall Piovra Typhoon Svängningsrörelse Planetrörelse La Paloma Cirkelrörelse FRITT FALL (Mega Drop) Gradskiva och måttband Räknemaskin Tidtagarur
AKTIVITETER VID POWERPARK/HÄRMÄ Acceleration Mega Drop Fritt fall Piovra Typhoon Svängningsrörelse Planetrörelse La Paloma Cirkelrörelse FRITT FALL (Mega Drop) Gradskiva och måttband Räknemaskin Tidtagarur
ANDRAGRADSKURVOR Vi betraktar ekvationen
 ANDRAGRADSKURVOR Vi betraktar ekvationen Ax + Bxy + Cy + Dx + Fy + G 0 (ekv) där minst en av A,B, eller C är skild från 0 En andragradskurva är mängden av alla punkter vilkas koordinater satisfierar en
ANDRAGRADSKURVOR Vi betraktar ekvationen Ax + Bxy + Cy + Dx + Fy + G 0 (ekv) där minst en av A,B, eller C är skild från 0 En andragradskurva är mängden av alla punkter vilkas koordinater satisfierar en
DIFFERENTIALEKVATIONER. INLEDNING OCH GRUNDBEGREPP
 DIFFERENTIALEKVATIONER INLEDNING OCH GRUNDBEGREPP Differentialekvation (DE) är en ekvation som innehåller derivator av en eller flera okända funktioner ORDINÄRA DIFFERENTIAL EKVATIONER i) En differentialekvation
DIFFERENTIALEKVATIONER INLEDNING OCH GRUNDBEGREPP Differentialekvation (DE) är en ekvation som innehåller derivator av en eller flera okända funktioner ORDINÄRA DIFFERENTIAL EKVATIONER i) En differentialekvation
Omtentamen i Mekanik I SG1130, grundkurs för CMATD och CL. Problemtentamen
 2015-06-12 Omtentamen i Mekanik I SG1130, grundkurs för CMATD och CL. OBS: Inga hjälpmede förutom rit- och skrivdon får användas! KTH Mekanik Problemtentamen 1. Med hjälp av en tråd kan ett homogent block
2015-06-12 Omtentamen i Mekanik I SG1130, grundkurs för CMATD och CL. OBS: Inga hjälpmede förutom rit- och skrivdon får användas! KTH Mekanik Problemtentamen 1. Med hjälp av en tråd kan ett homogent block
Tentamensskrivning i Mekanik (FMEA30) Del 1 Statik och partikeldynamik
 Del 1 Statik och partikeldynamik") Mekanik, LTH Tentamensskrivning i Mekanik (FMEA30) Del 1 Statik och partikeldynamik Fredagen den 25 oktober 2013, kl. 14-19 Namn(texta):. Personnr: ÅRSKURS M:... Namn(signatur).. Skrivningen består av
Mekanik, LTH Tentamensskrivning i Mekanik (FMEA30) Del 1 Statik och partikeldynamik Fredagen den 25 oktober 2013, kl. 14-19 Namn(texta):. Personnr: ÅRSKURS M:... Namn(signatur).. Skrivningen består av
Mekanik FK2002m. Vektorer
 Mekanik FK2002m Föreläsning 2 Vektorer 2013-09-02 Sara Strandberg SARA STRANDBERG P. 1 FÖRELÄSNING 2 Introduktion Förra gången pratade vi om rörelse i en dimension. När vi går till flera dimensioner behöver
Mekanik FK2002m Föreläsning 2 Vektorer 2013-09-02 Sara Strandberg SARA STRANDBERG P. 1 FÖRELÄSNING 2 Introduktion Förra gången pratade vi om rörelse i en dimension. När vi går till flera dimensioner behöver
Vektorgeometri för gymnasister
 Vektorgeometri för gymnasister Per-Anders Svensson http://homepage.lnu.se/staff/psvmsi/vektorgeometri/gymnasiet.html Fakulteten för teknik Linnéuniversitetet Räta linjens och planets ekvationer III Innehåll
Vektorgeometri för gymnasister Per-Anders Svensson http://homepage.lnu.se/staff/psvmsi/vektorgeometri/gymnasiet.html Fakulteten för teknik Linnéuniversitetet Räta linjens och planets ekvationer III Innehåll
Integraler av vektorfält Mats Persson
 Föreläsning 1/8 Integraler av vektorfält Mats Persson 1 Linjeintegraler Exempel: En partikel rör sig längs en kurva r(τ) under inverkan av en kraft F(r). i vill då beräkna arbetet som kraften utövar på
Föreläsning 1/8 Integraler av vektorfält Mats Persson 1 Linjeintegraler Exempel: En partikel rör sig längs en kurva r(τ) under inverkan av en kraft F(r). i vill då beräkna arbetet som kraften utövar på