Välkomna till TSRT19 Reglerteknik Föreläsning 1
|
|
|
- Jan Magnusson
- för 6 år sedan
- Visningar:
Transkript
1 Välkomna till TSRT19 Reglerteknik Föreläsning 1 Johan Löfberg Avdelningen för reglerteknik Institutionen för systemteknik johan.lofberg@liu.se Kontor: B-huset ingång
2 2 Föreläsningsanteckningar på nätet (kan uppdateras någon dag innan föreläsningen) 12 föreläsningar, 13 lektioner Anmäl er till lektionsgrupper på Lisam (under Anmälning) 3 laborationer Lab 1: Modeller, signaler, lär känna MinSeg-robot Lab 2: PID-reglering av MinSeg-motor Lab 3: Balansering av MinSeg-robot Anmälan på Lisam (aktiveras om någon dag) Kräver rejäla förberedelser Frivilliga föreläsningsquizar (högst rekommenderade!) Tenta: Kursbok och utgiven formelsamling tillåtna Anteckningssamlingar och lösningsmallar ej tillåtna Anteckningar i boken tillåtet
3 Dagens föreläsning 3 Reglerteknik i praktiken (massvis med exempel) Definition av basbegrepp Styrsignal, mätsignal, referenssignal, system, modell Återkoppling Dynamiska system Vår första reglerdesign: Konstruktion av farthållare Modeller, Öppen vs sluten styrning, P-reglering
4 Reglerteknik 4 Möjliggör lösningar på omöjliga problem Kallas ofta the hidden technology Centralt område för många av Sveriges teknikföretag. Tacksamt område med massor av roliga tillämpningar! Praktisk tillämpning av diffar, linjär algebra (och transformer) Kärnan i mekatronik Algoritmerna i autonoma system
 ACE (reglering av stötdämpare i kurvor) TCS (reglering av hjulspinn) ACC (reglering av fart och")
5 5 Moderna bilar Många förkortningar i försäljningsbrochyren döljer ett reglersystem ABS (reglering av bromskraft) ESC (reglering av spårstabilitet) ACE (reglering av stötdämpare i kurvor) TCS (reglering av hjulspinn) ACC (reglering av fart och avstånd)
6 6

7 7 Vindkraftverk Ett flertal reglerproblem Varje gång masten passeras skapas farliga krafter som kan minskas genom reglering av bladens vinkel vid passage

8 Reglertekniska exempel 8 Moderna stridsflygplan Designade så att de inte går att flyga manuellt Om reglersystemet har designfel kan det gå illa, och detta var orsaken till krascherna 89 och 93

9 9 Kitepower Kräver smart reglering av draklinor
10 10

11 11 Drönare Dåligt rykte men massvis med spännande tillämpningar

12 12 Motorcyklar Traction control nu även på produktionsmotorcyklar The electronics is so important now and this makes the rider less important. I would like that the rider controlled more the motorcycle but maybe with so powerful bikes now it would not be possible to ride these bikes without the electronics. For sure it is easier to ride them. Valentino Rossi

13 13 Reglerteknik kommer inte användas på cross/enduro-hojar för det skulle vara fusk samt förta nöjet Johan Löfberg 2008

14 2017 modell 14

15 15 Extremt stora teleskop Vi har nått gränsen för hur stora speglarna kan göras Stora teleskop byggs med massvis små speglar som sedan styrs så att bilden blir skarp (kallas adaptiv optik)

16 16 Mobiltelefoner Reglerteknik används t.ex för att reglera signalstyrka i kommunikationen mellan mobiltelefon och basstation

17 17 Gammal hederlig hårddisk Läsarmen måste positioneras på exakt rätt plats så snabbt som möjligt Utan aktiv reglering svänger armen vid förflyttningar, och man måste vänta länge tills armen är still och man kan läsa data.

18 18 Industrirobotar Precis samma problem som hårddisken. En robotarm är relativt vek, och oscillerar kraftigt efter rörelser

19 19 Hallsta använder 1,9 TWh per år. Det är lika mycket som Malmö stad inklusive alla industrier Många gånger är det reglersystemen och transmissionssystemen som är ineffektiva, inte motorerna i sig.
20 Någon som känner igen kurvorna? 20
21 21 Inflation och ränta Riksbanken försöker reglera (styra) inflation via reporänta (styrränta) (med diskutabel framgång...)

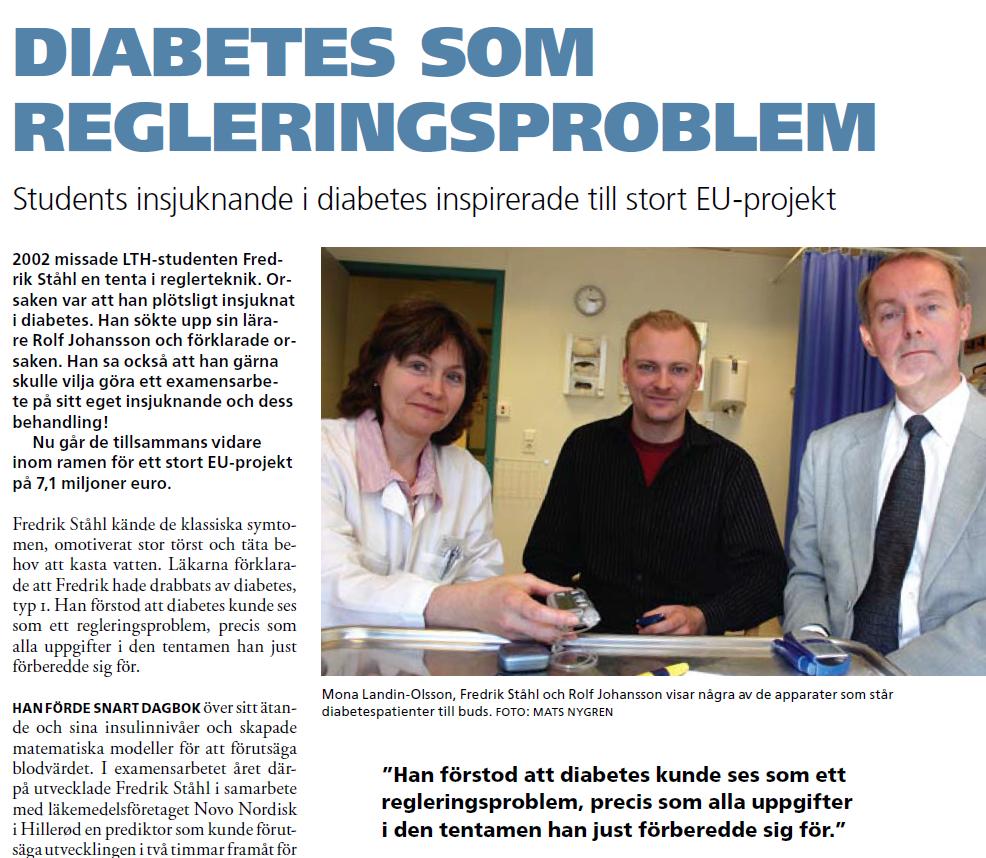
22 22 Automatiserad narkos Ett reglersystem ersätter/hjälper narkosläkaren Systemet reglerar medvetandegraden (BIS)


23 23 Segway En av de mest uppenbara reglertekniska konsumentprodukterna som finns Fungerar inte utan ett reglersystem vilket G.W. Bush blir varse om här då han missat att slå på strömmen
 Reglertekniskt samma som")

24 24 Klätter- och balansrullstol (ibot) Reglertekniskt samma som Segway, balansera en instabil tvåhjuling precis vad vi gör på lab 3!
25 25 Patent pending? A device for stabilization of open liquid containers placed on a 6-DOF table connected to free agents in enviroments with severe disturbances.
26 Det reglertekniska problemet 26 Välj styrsignalen u(t) så att systemet (enligt mätsignalen y(t)) beter sig som önskat (referenssignalen r(t)) trots störningar w(t) (ofta använder vi ordet insignal istället för styrsignal, och utsignal istället för mätsignal)
27 Det reglertekniska problemet 27 System u(t) y(t) r(t) w(t) Farthållare Narkos Sveriges ekonomi Gaspådrag broms Hastighet Inställd hastighet Väglutning, Vind Droginjicering Medvetande Högre än död Drogtolerans, patientvikt Styrränta Inflation Inflationsmål 2% Politik, konjunktur
28 Det reglertekniska problemet 28 Vi illustrerar system ( saken vi reglerar) konceptuellt med blockscheman w(t) u(t) System y(t) I denna kurs antar vi att systemen är dynamiska och linjära (tema på nästa föreläsning)
29 Återkoppling 29 En fundamental princip i reglerteknik är återkoppling, här illustrerat på destillationskolonn 1. Formulera ett önskemål (referenssignal) Vi vill ha en vätsketemperatur på 80º 2. Mät den nuvarande temperaturen (mätsignal) Nu är det 60º 3. Genomför åtgärd (ingrepp med styrsignalen) Öka värmetillförsel! 4. Mät den nuvarande temperaturen 5. Åtgärd Återkoppling!
30 Återkoppling 30 Återkopplade systemet w(t) r(t) Regulator ( Styrlag ) u(t) System y(t) Återkoppling!

31 Återkoppling 31 Återkopplade farthållarsystemet gas hastighet

32 Återkoppling 32 Återkopplade narkossystemet Droger Medvetande


33 Återkoppling 33 Återkopplade ekonomisystemet 2% ränta System inflation
34 Det reglertekniska problemet 34 I kursen frågar vi oss Hur kan vi beskriva systemet vi skall reglera (skapa en modell) Hur kan vi analysera systemet vi skall reglera Hur gör vi för att designa en regulator (styrlagen, algoritmen) Hur analyserar vi det återkopplade systemet (vad kan gå fel?)
![Design av farthållare 35 φ u(t): Drivande/bromsande kraft genererad av motor och broms [N] y(t): Bilens hastighet](/docs-images/91/106241135/images/35-0.jpg "[m/s] φ: Vägbanans lutning [rad] m: Bilens vikt [kg] α: Luftmotståndskoefficient [Ns/m], luftmotstånd = αy(t) [N]")
35 Design av farthållare 35 φ u(t): Drivande/bromsande kraft genererad av motor och broms [N] y(t): Bilens hastighet [m/s] φ: Vägbanans lutning [rad] m: Bilens vikt [kg] α: Luftmotståndskoefficient [Ns/m], luftmotstånd = αy(t) [N]
 = 25m/s.")
36 Design av farthållare 36 Newton Modell: m=1000kg, α=200ns/m, φ=0 Öppen styrning: Vårt mål är att nå en referenshastighet på r(t) = 25m/s. Vi testar följande styrlag Lösning: Vi når referenshastigheten asymptotiskt
37 Design av farthållare 37 w(t)=mgsin(φ) r(t)= u(t) y(t)
38 Design av farthållare 38 Verkligheten: Vindtunneltest har gått fel, egentligen är α=150ns/m Vi använder dock valda styrlagen och får Bilen uppnår för hög hastighet Orsak: Vi har inte återkopplat den verkliga hastigheten utan litar blint på den givna modellen!
39 Design av farthållare 39

40 Design av farthållare 40 Sluten styrning: Återkoppla hastigheten! En rimlig strategi är att gasa mer när man kör för sakta och bromsa när vi kör för snabbt Detta kallas propertionalreglering, P-reglering, och konstanten K är den enda designvariablen i regulatorn Slutna systemet
41 Design av farthållare 41 w(t)=mgsin(φ) r(t)=25 Σ e(t) K u(t) y(t) -1
42 Design av farthållare 42
43 Design av farthållare 43 Orealistiskt mycket motoreffekt krävs! (och den här bilen vill man inte åka i till vardags)


44 Vad är en regulator, egentligen? 44 Regulatorn är en dator i bilen, som mäter hastigheten och önskad fart, och skickar styrsignaler (önskat moment) till motorn y u r program CruiseControl K = 200; % Control engineer told us! repeat r = getdesiredspeed y = getspeedmeasurement u = K*(r-y); TorqueRequest(u) wait(0.01 sec) end
45 Sammanfattning 45 Sammanfattning av dagens föreläsning Reglerteknik finns överallt Vi använder differentialekvationer för att skapa modeller över system Öppen styrning väldigt känslig för modellparametrar och störningar Återkoppling kan reducera känsligheten markant Återkoppling u(t) = K(r(t)-y(t)) kallas P-reglering Vi har fortfarande inte bra reglering, bättre regulatordesign krävs!
46 Sammanfattning 46 Viktiga begrepp Reglerteknik: Konsten att få system att uppföra sig som vi vill. Signaler: Funktioner av tiden som innehåller information. System: Ett objekt som drivs av insignaler och som respons på dessa producerar utsignaler. Modell: Förenklad beskrivning av verkligheten. I denna kurs, en matematisk beskrivning av det system vi studerar. Dynamiska system: System där utsignalen just nu inte enbart beror av nuvarande insignaler utan även av tidigare insignaler. Återkoppling: För tillbaka information om systemets nuvarande tillstånd till regulatorn. Reglerteknik är läran om återkopplade system.
47 Dynamiska system 47 System med minne, dvs nuvarande tillstånd beror på vad som hänt tidigare. Ändring sker inte direkt då insignal ändras Hastighet och läge på bil (beror på tidigare motorpådrag) Rumstemperatur (beror på tidigare uppvärmning och yttertemperatur) Konjunktur (beror på politik, investeringar etc de senaste åren) Matematiskt: Systemet beskrivs av en differentialekvation En beskrivning (oftast approximativ) av ett system kallas en modell Motsats: Statiskt system
 Linjärt")

48 Linjära system 48 u(t) System y(t) Linjärt system innebär att superpositionsprincipen håller
49 Linjära system 49 Linjära ordinära differentialekvationer uppfyller detta Vi arbetar enbart med system som kan beskrivas av linjära ordinära differentialekvationer Mer (mycket mer) om detta nästa föreläsning
Välkomna till TSRT03/19 Reglerteknik Föreläsning 1
 Välkomna till TSRT03/19 Reglerteknik Föreläsning 1 Johan Löfberg Avdelningen för reglerteknik Institutionen för systemteknik johanl@isy.liu.se Tel: 281304 Kontor: B-huset ingång 23-25 www.control.isy.liu.se/student/tsrt19
Välkomna till TSRT03/19 Reglerteknik Föreläsning 1 Johan Löfberg Avdelningen för reglerteknik Institutionen för systemteknik johanl@isy.liu.se Tel: 281304 Kontor: B-huset ingång 23-25 www.control.isy.liu.se/student/tsrt19
Välkomna till TSRT19 Reglerteknik M Föreläsning 1
 Välkomna till TSRT19 Reglerteknik M Föreläsning 1 Johan Löfberg Avdelningen för reglerteknik Institutionen för systemteknik johanl@isy.liu.se Tel: 281304 Kontor: B-huset ingång 23-25 www.control.isy.liu.se/student/tsrt19ht2
Välkomna till TSRT19 Reglerteknik M Föreläsning 1 Johan Löfberg Avdelningen för reglerteknik Institutionen för systemteknik johanl@isy.liu.se Tel: 281304 Kontor: B-huset ingång 23-25 www.control.isy.liu.se/student/tsrt19ht2
Välkomna till TSRT15 Reglerteknik Föreläsning 1
 Välkomna till TSRT15 Reglerteknik Föreläsning 1 Johan Löfberg Avdelningen för reglerteknik Institutionen för systemteknik johanl@isy.liu.se Tel: 284029 Kontor: B-huset ingång 25-27 www.control.isy.liu.se/student/tsrt15/
Välkomna till TSRT15 Reglerteknik Föreläsning 1 Johan Löfberg Avdelningen för reglerteknik Institutionen för systemteknik johanl@isy.liu.se Tel: 284029 Kontor: B-huset ingång 25-27 www.control.isy.liu.se/student/tsrt15/
Reglerteknik är konsten att få saker att uppföra sig som man vill
 TSIU61 Föreläsning 1 Gustaf Hendeby HT1 2017 1 / 34 Vad är reglerteknik? TSIU61: Reglerteknik Föreläsning 1 Kursinformation Bakgrund Gustaf Hendeby gustaf.hendeby@liu.se Reglerteknik är konsten att få
TSIU61 Föreläsning 1 Gustaf Hendeby HT1 2017 1 / 34 Vad är reglerteknik? TSIU61: Reglerteknik Föreläsning 1 Kursinformation Bakgrund Gustaf Hendeby gustaf.hendeby@liu.se Reglerteknik är konsten att få
TSIU61: Reglerteknik. Kursinformation Bakgrund. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 1 Kursinformation Bakgrund Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 1 Gustaf Hendeby HT1 2017 1 / 34 Vad är reglerteknik? Reglerteknik är konsten att få
TSIU61: Reglerteknik Föreläsning 1 Kursinformation Bakgrund Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 1 Gustaf Hendeby HT1 2017 1 / 34 Vad är reglerteknik? Reglerteknik är konsten att få
Välkomna till Reglerteknik 2015!!
 Vad är reglerteknik? Välkomna till Reglerteknik 2015!! Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) Reglerteknik är konsten att få saker
Vad är reglerteknik? Välkomna till Reglerteknik 2015!! Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) Reglerteknik är konsten att få saker
TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 1!
 TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 1! Johan Löfberg Avdelningen för Reglerteknik Institutionen för systemteknik Johan.lofberg@liu.se Kontor: B-huset, mellan ingång 23 och 25
TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 1! Johan Löfberg Avdelningen för Reglerteknik Institutionen för systemteknik Johan.lofberg@liu.se Kontor: B-huset, mellan ingång 23 och 25
TSRT91 Reglerteknik: Föreläsning 1
 1 / 27 Diverse TSRT91 Reglerteknik: Föreläsning 1 Föreläsare och examinator: Martin Enqvist Martin Enqvist Lektionsassistent: Yuxin Zhao Kursrum i Lisam Reglerteknik Institutionen för systemteknik Linköpings
1 / 27 Diverse TSRT91 Reglerteknik: Föreläsning 1 Föreläsare och examinator: Martin Enqvist Martin Enqvist Lektionsassistent: Yuxin Zhao Kursrum i Lisam Reglerteknik Institutionen för systemteknik Linköpings
TSRT91 Reglerteknik: Föreläsning 1
 TSRT91 Reglerteknik: Föreläsning 1 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Diverse 1 / 27 Föreläsare och examinator: Martin Enqvist Lektionsassistent: Angela Fontan
TSRT91 Reglerteknik: Föreläsning 1 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Diverse 1 / 27 Föreläsare och examinator: Martin Enqvist Lektionsassistent: Angela Fontan
TSIU61: Reglerteknik. Matematiska modeller Laplacetransformen. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 2 Matematiska modeller Laplacetransformen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 2 Gustaf Hendeby HT1 2017 1 / 21 Innehåll föreläsning 2 ˆ Sammanfattning
TSIU61: Reglerteknik Föreläsning 2 Matematiska modeller Laplacetransformen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 2 Gustaf Hendeby HT1 2017 1 / 21 Innehåll föreläsning 2 ˆ Sammanfattning
Kort introduktion till Reglerteknik I
 Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars egenskaper vi vill studera/styra. Vi betraktar system som har
Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars egenskaper vi vill studera/styra. Vi betraktar system som har
Välkomna till TSRT15 Reglerteknik Föreläsning 2
 Välkomna till TSRT15 Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till TSRT15 Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
AUTOMATIC CONTROL REGLERTEKNIK LINKÖPINGS UNIVERSITET. M. Enqvist TTIT62: Föreläsning 2. Här är
 Martin Enqvist Återkoppling, PID-reglering, specifikationer Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(21) Exempel: Farthållare i en bil 4(21) Välj
Martin Enqvist Återkoppling, PID-reglering, specifikationer Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(21) Exempel: Farthållare i en bil 4(21) Välj
Välkomna till TSRT19 Reglerteknik Föreläsning 3. Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula
 Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Reglerteknik I: F1. Introduktion. Dave Zachariah. Inst. Informationsteknologi, Avd. Systemteknik
 Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars
Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars
Välkomna till Reglerteknik Föreläsning 2
 Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Kort introduktion till Reglerteknik I
 Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. 1 / 12 alexander.medvedev@it.uu.se Intro Kort introduktion till Reglerteknik I Vad är reglerteknik?
Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. 1 / 12 alexander.medvedev@it.uu.se Intro Kort introduktion till Reglerteknik I Vad är reglerteknik?
TSIU61: Reglerteknik. Sammanfattning från föreläsning 3 (2/4) ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.
 ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.") TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik. PID-reglering Specifikationer. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
TENTAMEN REGLERTEKNIK TSRT15
 TENTAMEN REGLERTEKNIK TSRT5 SAL: TER3+4 TID: 8 december 2, klockan 4-9 KURS: TSRT5 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL BLAD: 3 exklusive försättsblad ANSVARIG LÄRARE: Johan Löfberg JOURHAVANDE
TENTAMEN REGLERTEKNIK TSRT5 SAL: TER3+4 TID: 8 december 2, klockan 4-9 KURS: TSRT5 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL BLAD: 3 exklusive försättsblad ANSVARIG LÄRARE: Johan Löfberg JOURHAVANDE
INTRODUKTION TILL SYSTEM- OCH REGLERTEKNIK (3 sp) TIDIGARE: GRUNDKURS I REGLERING OCH INSTRUMENTERING 3072 (2sv) Hannu Toivonen
 TIDIGARE: GRUNDKURS I REGLERING OCH INSTRUMENTERING 3072 (2sv) Hannu Toivonen") INTRODUKTION TILL SYSTEM- OCH REGLERTEKNIK 419106 (3 sp) TIDIGARE: GRUNDKURS I REGLERING OCH INSTRUMENTERING 3072 (2sv) Föreläsare 2007: Hannu Toivonen LITTERATUR KOMPENDIUM: Kompendium och övrig information
INTRODUKTION TILL SYSTEM- OCH REGLERTEKNIK 419106 (3 sp) TIDIGARE: GRUNDKURS I REGLERING OCH INSTRUMENTERING 3072 (2sv) Föreläsare 2007: Hannu Toivonen LITTERATUR KOMPENDIUM: Kompendium och övrig information
AUTOMATIC CONTROL REGLERTEKNIK LINKÖPINGS UNIVERSITET. M. Enqvist TTIT62: Föreläsning 3 AUTOMATIC CONTROL REGLERTEKNIK LINKÖPINGS UNIVERSITET
 Martin Enqvist Överföringsfunktioner, poler och stegsvar Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(8) Repetition: Öppen styrning & återkoppling 4(8)
Martin Enqvist Överföringsfunktioner, poler och stegsvar Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(8) Repetition: Öppen styrning & återkoppling 4(8)
Formalia. Reglerteknik, TSRT12. Föreläsning 1. Första föreläsningen. Vad är reglerteknik?
 Formalia Reglerteknik, TSRT12 Föreläsning 1 Hemsida. http://www.control.isy.liu.se/student/tsrt12/ Föreläsnings-oh läggs ut ca en dag i förväg. Lablistor på första lektionen. Läroboken tillåten på tentan
Formalia Reglerteknik, TSRT12 Föreläsning 1 Hemsida. http://www.control.isy.liu.se/student/tsrt12/ Föreläsnings-oh läggs ut ca en dag i förväg. Lablistor på första lektionen. Läroboken tillåten på tentan
Industriella styrsystem, TSIU06. Föreläsning 1
 Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Kursöversikt 2(34) Detta är en laborations- och projektkurs. Praktiken kommer före teorin (kursen Reglerteknik) Tre
Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Kursöversikt 2(34) Detta är en laborations- och projektkurs. Praktiken kommer före teorin (kursen Reglerteknik) Tre
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING TID: 13 mars 2018, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 070-3113019 BESÖKER SALEN: 09.30,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING TID: 13 mars 2018, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 070-3113019 BESÖKER SALEN: 09.30,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
Välkomna till TSRT19 Reglerteknik Föreläsning 6. Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 6 Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden! Sammanfattning av förra föreläsningen 2 G(s) Sinus in (i stabilt system) ger sinus
Välkomna till TSRT19 Reglerteknik Föreläsning 6 Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden! Sammanfattning av förra föreläsningen 2 G(s) Sinus in (i stabilt system) ger sinus
EL1000/1120/1110 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 12: Sammanfattning Kursinfo: Resterande räknestugor 141208, 10-12 Q24 141210, 10-12 L21 141215, 10-12 Q34 141215, 13-15 Q11
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 12: Sammanfattning Kursinfo: Resterande räknestugor 141208, 10-12 Q24 141210, 10-12 L21 141215, 10-12 Q34 141215, 13-15 Q11
TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 10
 TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 10 Johan Löfberg Avdelningen för Reglerteknik Institutionen för systemteknik johan.lofberg@liu.se Kontor: B-huset, mellan ingång 27 och 29
TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 10 Johan Löfberg Avdelningen för Reglerteknik Institutionen för systemteknik johan.lofberg@liu.se Kontor: B-huset, mellan ingång 27 och 29
TENTAMEN I REGLERTEKNIK
 TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER, TER 2, TER E TID: 4 mars 208, klockan 8-3 KURS: TSRT2, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
TENTAMEN I REGLERTEKNIK Y/D SAL: TER, TER 2, TER E TID: 4 mars 208, klockan 8-3 KURS: TSRT2, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
1. Inledning. 1. Inledning
 För de flesta människor är ett relativt okänt begrepp trots att var och en i det dagliga livet ständigt kommer i kontakt med och t.o.m. själv utövar. Reglerteknik är varje rationell metod att styra eller
För de flesta människor är ett relativt okänt begrepp trots att var och en i det dagliga livet ständigt kommer i kontakt med och t.o.m. själv utövar. Reglerteknik är varje rationell metod att styra eller
Industriella styrsystem, TSIU06. Föreläsning 1
 Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Utgångspunkter Vad? Varför? Hur? Vad? Reglerteknik - Konsten att styra system automatiskt Vad? System - Ett objekt
Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Utgångspunkter Vad? Varför? Hur? Vad? Reglerteknik - Konsten att styra system automatiskt Vad? System - Ett objekt
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: Ter2 TID:4 mars 207, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 0730-9699 BESÖKER SALEN:
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: Ter2 TID:4 mars 207, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 0730-9699 BESÖKER SALEN:
Föreläsning 2. Reglerteknik AK. c Bo Wahlberg. 3 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Föreläsning 1 Reglerteknik AK
 Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
Välkomna till TSRT19 Reglerteknik Föreläsning 8. Sammanfattning av föreläsning 7 Framkoppling Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
EL1000/1120/1110 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
Laplacetransform, poler och nollställen
 Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
TSRT91 Reglerteknik: Föreläsning 9
 TSRT91 Reglerteknik: Föreläsning 9 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 20 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT91 Reglerteknik: Föreläsning 9 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 20 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TENTAMEN I REGLERTEKNIK Y TSRT12 för Y3 och D3. Lycka till!
 TENTAMEN I REGLERTEKNIK Y TSRT2 för Y3 och D3 TID: 7 mars 25, klockan 4-9. ANSVARIGA LÄRARE: Mikael Norrlöf, tel 28 27 4, Anna Hagenblad, tel 28 44 74 TILLÅTNA HJÄLPMEDEL: Läroboken Glad-Ljung: Reglerteknik,
TENTAMEN I REGLERTEKNIK Y TSRT2 för Y3 och D3 TID: 7 mars 25, klockan 4-9. ANSVARIGA LÄRARE: Mikael Norrlöf, tel 28 27 4, Anna Hagenblad, tel 28 44 74 TILLÅTNA HJÄLPMEDEL: Läroboken Glad-Ljung: Reglerteknik,
REGLERTEKNIK Inledande laboration (obligatorisk)
") UPPSALA UNIVERSITET AVDELNINGEN FÖR SYSTEMTEKNIK HN, MW 2008-01-23 Rev. HN, 2015-01-15 REGLERTEKNIK Inledande laboration (obligatorisk) Läsanvisningar: 1. Läs igenom instruktionen innan påbörjad laboration
UPPSALA UNIVERSITET AVDELNINGEN FÖR SYSTEMTEKNIK HN, MW 2008-01-23 Rev. HN, 2015-01-15 REGLERTEKNIK Inledande laboration (obligatorisk) Läsanvisningar: 1. Läs igenom instruktionen innan påbörjad laboration
TENTAMEN I REGLERTEKNIK TSRT03, TSRT19
 TENTAMEN I REGLERTEKNIK TSRT3, TSRT9 TID: 23 april 29, klockan 4-9 KURS: TSRT3, TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 5.3, 7.3 KURSADMINISTRATÖR:
TENTAMEN I REGLERTEKNIK TSRT3, TSRT9 TID: 23 april 29, klockan 4-9 KURS: TSRT3, TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 5.3, 7.3 KURSADMINISTRATÖR:
TENTAMEN I REGLERTEKNIK
 TENTAMEN I REGLERTEKNIK SAL: T,T2 KÅRA TID: januari 27, klockan 8-3 KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 9.3,.3 KURSADMINISTRATÖR:
TENTAMEN I REGLERTEKNIK SAL: T,T2 KÅRA TID: januari 27, klockan 8-3 KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 9.3,.3 KURSADMINISTRATÖR:
Välkomna till TSRT19 Reglerteknik M Föreläsning 7. Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet
 Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24-4-22 Sal () TER2,TER3,TERF (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24-4-22 Sal () TER2,TER3,TERF (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-6-7 Sal () TER2 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-6-7 Sal () TER2 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 216-8-19 Sal (1) (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal som
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 216-8-19 Sal (1) (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal som
Reglerteknik Z2. Kurskod: SSY 050 och ERE080. Tentamen 2006-08-24
 Reglerteknik Z2 Kurskod: SSY 050 och ERE080 Tentamen 2006-08-24 Tid: 14:00-18:00, Lokal: V-huset Lärare: Goran Cengic tel 3729, 073-903 70 10 Tentamen omfattar 25 poäng, där betyg tre fordrar 10 poäng,
Reglerteknik Z2 Kurskod: SSY 050 och ERE080 Tentamen 2006-08-24 Tid: 14:00-18:00, Lokal: V-huset Lärare: Goran Cengic tel 3729, 073-903 70 10 Tentamen omfattar 25 poäng, där betyg tre fordrar 10 poäng,
Välkomna till TSRT19 Reglerteknik M Föreläsning 9
 Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning av förra föreläsningen H(s) W(s) 2 R(s)
Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning av förra föreläsningen H(s) W(s) 2 R(s)
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen , kl
 REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2009 12 15, kl. 14.00 19.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2009 12 15, kl. 14.00 19.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
Reglerteknik AK, FRTF05
 Institutionen för REGLERTEKNIK Reglerteknik AK, FRTF05 Tentamen 3 april 208 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
Institutionen för REGLERTEKNIK Reglerteknik AK, FRTF05 Tentamen 3 april 208 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2014-03-17 Sal (1) TER2,TER3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2014-03-17 Sal (1) TER2,TER3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken
Välkomna till TSRT19 Reglerteknik M Föreläsning 9
 Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning föreläsning 8 2 F(s) Lead-lag design:
Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning föreläsning 8 2 F(s) Lead-lag design:
TENTAMEN I TSRT91 REGLERTEKNIK
 SAL: TER3 TENTAMEN I TSRT9 REGLERTEKNIK TID: 28-4-3 kl. 4: 9: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 7-69294 BESÖKER SALEN: cirka
SAL: TER3 TENTAMEN I TSRT9 REGLERTEKNIK TID: 28-4-3 kl. 4: 9: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 7-69294 BESÖKER SALEN: cirka
TSIU61: Reglerteknik
 TSIU61: Reglerteknik Föreläsning 11 Tidsdiskret implementering Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 11 Gustaf Hendeby HT1 2017 1 / 17 Innehåll föreläsning 11 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 11 Tidsdiskret implementering Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 11 Gustaf Hendeby HT1 2017 1 / 17 Innehåll föreläsning 11 ˆ Sammanfattning av föreläsning
Regulator. G (s) Figur 1: Blockdiagram för ett typiskt reglersystem
 Figur 1: Blockdiagram för ett typiskt reglersystem") Rs) + Σ Es) Regulator G s) R Us) Process G s) P Ys) Figur : Blockdiagram för ett typiskt reglersystem Något om PID-reglering PID-regulatorn består av proportionell del, integrerande del och deriverande
Rs) + Σ Es) Regulator G s) R Us) Process G s) P Ys) Figur : Blockdiagram för ett typiskt reglersystem Något om PID-reglering PID-regulatorn består av proportionell del, integrerande del och deriverande
REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN
 AV REGLERTEKNIKEN") REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN Automatisk styra processer. Generell metodik Bengt Carlsson Huvudantagande: Processen kan påverkas med en styrsignal (insignal). Normalt behöver man kunna mäta
REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN Automatisk styra processer. Generell metodik Bengt Carlsson Huvudantagande: Processen kan påverkas med en styrsignal (insignal). Normalt behöver man kunna mäta
TSRT91 Reglerteknik: Föreläsning 2
 Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Välkomna till TSRT15 Reglerteknik Föreläsning 12
 Välkomna till TSRT15 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Återkoppling av skattade tillstånd Integralverkan Återblick på kursen Sammanfattning föreläsning 11 2 Tillstånden innehåller
Välkomna till TSRT15 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Återkoppling av skattade tillstånd Integralverkan Återblick på kursen Sammanfattning föreläsning 11 2 Tillstånden innehåller
Reglerteknik II 7sp (för sista gången) Jari Böling
 Jari Böling") Reglerteknik II 7sp (för sista gången) Jari Böling jboling@abo.fi Vad är reglerteknik? De flesta av er har gått på 2 kurser, vad har ni lärt er? Vad är reglerteknik? Man försöker undvika att något illa
Reglerteknik II 7sp (för sista gången) Jari Böling jboling@abo.fi Vad är reglerteknik? De flesta av er har gått på 2 kurser, vad har ni lärt er? Vad är reglerteknik? Man försöker undvika att något illa
TENTAMEN I REGLERTEKNIK I
 TENTAMEN I REGLERTEKNIK I SAL: TER2 TID: 6 mars 2, klockan 8-3 KURS: TSRT9, Reglerteknik I PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 9 ANSVARIG
TENTAMEN I REGLERTEKNIK I SAL: TER2 TID: 6 mars 2, klockan 8-3 KURS: TSRT9, Reglerteknik I PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 9 ANSVARIG
Reglerteknik, TSIU61. Föreläsning 1
 Reglerteknik, TSIU61 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Formalia 2(20) Hemsida. http://www.control.isy.liu.se/student/tsiu61/ Föreläsnings-oh läggs ut ca en dag i förväg. Till varje
Reglerteknik, TSIU61 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Formalia 2(20) Hemsida. http://www.control.isy.liu.se/student/tsiu61/ Föreläsnings-oh läggs ut ca en dag i förväg. Till varje
Föreläsning 3. Reglerteknik AK. c Bo Wahlberg. 9 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 3 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 9 september 2013 Introduktion Förra gången: PID-reglering Dagens program: Stabilitet Rotort
Föreläsning 3 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 9 september 2013 Introduktion Förra gången: PID-reglering Dagens program: Stabilitet Rotort
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2015-03-17 Sal (1) Egypten, Asgård, Olympen (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2015-03-17 Sal (1) Egypten, Asgård, Olympen (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal
TENTAMEN I TSRT22 REGLERTEKNIK
 SAL: TENTAMEN I TSRT22 REGLERTEKNIK TID: 27--23 kl. 8:-3: KURS: TSRT22 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Svante Gunnarsson, tel. 3-28747,7-3994847 BESÖKER SALEN:
SAL: TENTAMEN I TSRT22 REGLERTEKNIK TID: 27--23 kl. 8:-3: KURS: TSRT22 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Svante Gunnarsson, tel. 3-28747,7-3994847 BESÖKER SALEN:
övningstentamen I DYNAMISKA SYSTEM OCH REGLERING
 övningstentamen I DYNAMISKA SYSTEM OCH REGLERING SAL: - TID: mars 27, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 73-9699 BESÖKER SALEN:
övningstentamen I DYNAMISKA SYSTEM OCH REGLERING SAL: - TID: mars 27, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 73-9699 BESÖKER SALEN:
A. Stationära felet blir 0. B. Stationära felet blir 10 %. C. Man kan inte avgöra vad stationära felet blir enbart med hjälp av polerna.
 Man använder en observatör för att skatta tillståndsvariablerna i ett system, och återkopplar sedan från det skattade tillståndet. Hur påverkas slutna systemets överföringsfunktion om man gör observatören
Man använder en observatör för att skatta tillståndsvariablerna i ett system, och återkopplar sedan från det skattade tillståndet. Hur påverkas slutna systemets överföringsfunktion om man gör observatören
Industriell reglerteknik: Föreläsning 6
 Föreläsningar 1 / 15 Industriell reglerteknik: Föreläsning 6 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Föreläsningar 1 / 15 Industriell reglerteknik: Föreläsning 6 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
EL1000/1120 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
EL1000/1120/1110 Reglerteknik AK
 EL1000/1120/1110 Reglerteknik AK Kursansvarig: Henrik Sandberg hsan@kth.se Reglerteknik EES Osquldas v. 10 Dagens program: Kursinformation Reglerteknik konsten att styra Inledande exempel och begrepp Kursinformation
EL1000/1120/1110 Reglerteknik AK Kursansvarig: Henrik Sandberg hsan@kth.se Reglerteknik EES Osquldas v. 10 Dagens program: Kursinformation Reglerteknik konsten att styra Inledande exempel och begrepp Kursinformation
Välkomna till TSRT19 Reglerteknik Föreläsning 12
 Välkomna till TSRT19 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Integralverkan Återkoppling av skattade tillstånd Återblick på kursen LABFLYTT! 2 PGA felbokning datorsal så måste ett
Välkomna till TSRT19 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Integralverkan Återkoppling av skattade tillstånd Återblick på kursen LABFLYTT! 2 PGA felbokning datorsal så måste ett
TENTAMEN I TSRT91 REGLERTEKNIK
 SAL: TER2 TENTAMEN I TSRT9 REGLERTEKNIK TID: 29--7 kl. 8: 3: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 3-28393 BESÖKER SALEN: cirka
SAL: TER2 TENTAMEN I TSRT9 REGLERTEKNIK TID: 29--7 kl. 8: 3: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 3-28393 BESÖKER SALEN: cirka
Reglerteknik AK. Tentamen 27 oktober 2015 kl 8-13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 27 oktober 205 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 27 oktober 205 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Styr- och informationssystem
 Styr- och informationssystem Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Styr- och informationssystem 1 / 18 Grundidé: En industrirelevant profil som kombinerar teori-
Styr- och informationssystem Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Styr- och informationssystem 1 / 18 Grundidé: En industrirelevant profil som kombinerar teori-
Reglerteknik I: F3. Tidssvar, återkoppling och PID-regulatorn. Dave Zachariah. Inst. Informationsteknologi, Avd. Systemteknik
 Reglerteknik I: F3 Tidssvar, återkoppling och PID-regulatorn Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 12 Poler och tidssvar Stegsvar u(t) G y(t) Modell Y (s) = G(s)U(s) med överföringsfunktion
Reglerteknik I: F3 Tidssvar, återkoppling och PID-regulatorn Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 12 Poler och tidssvar Stegsvar u(t) G y(t) Modell Y (s) = G(s)U(s) med överföringsfunktion
TENTAMEN I TSRT91 REGLERTEKNIK
 SAL: G, TERD TENTAMEN I TSRT9 REGLERTEKNIK TID: 7-- kl. 8: : KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 7-6994 BESÖKER SALEN: cirka
SAL: G, TERD TENTAMEN I TSRT9 REGLERTEKNIK TID: 7-- kl. 8: : KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 7-6994 BESÖKER SALEN: cirka
Industriella styrsystem, TSIU04. Föreläsning 1
 Industriella styrsystem, TSIU04 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Mål Ge kunskaper och färdigheter om reglerteknik närmare verkligheten. Mera precist: Trimning av PID-regulatorer.
Industriella styrsystem, TSIU04 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Mål Ge kunskaper och färdigheter om reglerteknik närmare verkligheten. Mera precist: Trimning av PID-regulatorer.
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-- Sal () T,T2,KÅRA (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-- Sal () T,T2,KÅRA (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Reglerteknik Z / Bt/I/Kf/F
 Reglerteknik Z / Bt/I/Kf/F Kurskod: SSY 050, ERE 080, ERE 091 Tentamen 2007-05-29 Tid: 8:30-12:30, Lokal: M-huset Lärare: Knut Åkesson tel 3717, 0701-74 95 25 Tentamen omfattar 25 poäng, där betyg tre
Reglerteknik Z / Bt/I/Kf/F Kurskod: SSY 050, ERE 080, ERE 091 Tentamen 2007-05-29 Tid: 8:30-12:30, Lokal: M-huset Lärare: Knut Åkesson tel 3717, 0701-74 95 25 Tentamen omfattar 25 poäng, där betyg tre
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen , kl
 REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2013 05 31, kl. 8.00 13.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2013 05 31, kl. 8.00 13.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
REGLERTEKNIK, KTH. REGLERTEKNIK AK EL1000, EL1110 och EL1120
 REGLERTEKNIK, KTH REGLERTEKNIK AK EL1000, EL1110 och EL1120 Tentamen 20111017, kl 14:00 19:00 Hjälpmedel: Observandum: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande), räknetabeller,
REGLERTEKNIK, KTH REGLERTEKNIK AK EL1000, EL1110 och EL1120 Tentamen 20111017, kl 14:00 19:00 Hjälpmedel: Observandum: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande), räknetabeller,
Industriella styrsystem, TSIU06. Föreläsning 2
 Industriella styrsystem, TSIU06 Föreläsning 2 Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 1 2(24) Det finns en stor mängd system och processer som behöver styras. Återkopplingsprincipen:
Industriella styrsystem, TSIU06 Föreläsning 2 Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 1 2(24) Det finns en stor mängd system och processer som behöver styras. Återkopplingsprincipen:
Reglerteknik AK. Tentamen 24 oktober 2016 kl 8-13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
TSRT19 Reglerteknik: Välkomna!
 TSRT9 Reglerteknik: Välkomna! Föreläsning 6 Inger Erlander Klein / 25 Förra föreläsningen (föreläsning 5) Rotort plotta rötternas (polernas) läge som fnktion av någon parameter Bakhjlsstyrda cykeln (&
TSRT9 Reglerteknik: Välkomna! Föreläsning 6 Inger Erlander Klein / 25 Förra föreläsningen (föreläsning 5) Rotort plotta rötternas (polernas) läge som fnktion av någon parameter Bakhjlsstyrda cykeln (&
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2015-06-08 Sal (1) TER 2, TER 3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2015-06-08 Sal (1) TER 2, TER 3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in