Analys av multi/hyperspektrala bilder framsteg och resultat
|
|
|
- Gunnar Lindström
- för 9 år sedan
- Visningar:
Transkript
1 Analys av multi/hyperspektrala bilder framsteg och resultat JÖRGEN AHLBERG, MIKAEL LUNDBERG, JOAKIM RYDELL FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet. Kärnverksamheten är forskning, metod- och teknikutveckling till nytta för försvar och säkerhet. Organisationen har cirka 1000 anställda varav ungefär 800 är forskare. Detta gör organisationen till Sveriges största forskningsinstitut. FOI ger kunderna tillgång till ledande expertis inom ett stort antal tillämpningsområden såsom säkerhetspolitiska studier och analyser inom försvar och säkerhet, bedömning av olika typer av hot, system för ledning och hantering av kriser, skydd mot och hantering av farliga ämnen, IT-säkerhet och nya sensorers möjlighete FOI Totalförsvarets forskningsinstitut Tel: Informationssystem Fax: Box Linköping FOI-R SE Användarrapport Informationssystem ISSN December 2009

2 Jörgen Ahlberg, Mikael Lundberg, Joakim Rydell Analys av multi/hyperspektrala bilder framsteg och resultat

3 Titel Title Analys av multi/hyperspektrala bilder framsteg och resultat Analysis of multi/hypersspectral images progress and results Rapportnr/Report no Rapporttyp Report Type FOI-R SE Användarrapport User Report Månad/Month December Utgivningsår/Year 2009 Antal sidor/pages 31 p ISSN ISSN Kund/Customer Försvarsmakten Projektnr/Project no E53064 Godkänd av/approved by Ola Kärvell FOI, Totalförsvarets Forskningsinstitut FOI, Swedish Defence Research Agency Avdelningen för Informationssystem Information Systems Box 1165 Box Linköping SE Linköping

4 Sammanfattning Rapporten beskriver tre olika bildbehandlingsmetoder för tre olika ändamål. Alla tre är nödvändiga för att designa sensorsystem för att uppnå den eftertraktade förmågan att kunna spana mot ett område och detektera avvikelser, förändringar samt specifika spektrala signaturer (material). Den första metoden handlar om registrering eller samkalibrering, det vill säga att hitta den rumsliga transformationen mellan två bilder som visar (ungefär) samma område. Korrekt registrering är en förutsättning för förändringsdetektion, mosaikbildning, bildfusion och superupplösning. Den beskrivna metoden tar avstamp i kända metoder och anpassar dem till militära behov. Den andra metoden handlar om atmosfärskorrektion för att kunna studera spektrala signaturer hos de mål man spanar mot. Atmosfärskorrektion är en förutsättning för att kunna detektera specifika signaturer eller klassa pixlar efter material. Den tredje metoden är en informationsteoretisk metod för sensorprestandavärdering och avser att ge ett användbart mått obereonde av detektionsmetod. Nyckelord hyperspektral, multispektral, bildbehandling, registrering, mosaik, informationsteori, atmosfärskorrektion 1

5 Abstract This report describes three different image processing methods with three different purposes. All three are necessary for the design of sensor systems to enable the sought-for capability to, during reconnaissance of an area, detect anomalies, changes, and specific spectral signatures (materials). The first method is for registration, ie to find the spatial transformation between two images depicting (approximately) the same area. Correct registration is needed for change detection, mosaicking, image fusion, and super resolution. The described method exploits known methods and adapts them to military needs. The second method is for atmopsheric correction in order to be able to study the spectral signatures of targets in the reconnaissance area. The third method is an information theoretic measure for sensor performance assessment and is intended to give a useful measure independent of detection methods. Keywords hyperspectral, multispectral, image processing, registration, mosaic, information theory, atmospheric correction 2

6 Innehåll 1 Inledning Multi- och hyperspektrala bilder Översikt Registrering / samkalibrering av heterogena sensorer Bakgrund Metodik Förbehandling Mjukvaruramverk för registrering Egenskapsbaserad metod Resultat Olika våglängdsband (sensorfusion) Olika sensorer (sensorfusion) Olika tidpunkter (förändringsanalys) Mosaikbildning (kartering) Framtid Atmosfärskorrektion i hyperspektralt termiskt infrarött Bakgrund Framsteg och resultat Framtid Informationsmått för sensorprestandavärdering Bakgrund Metod Resultat Framtid Slutsatser Registrering Atmosfärskorrektion i hyperspektralt termiskt infrarött Informationsmått för sensorprestandavärdering Litteraturförteckning 31 3
................. 15 2.4 Framtid............................... 15 3 Atmosfärskorrektion i hyperspektralt termiskt infrarött 17 3.1 Bakgrund.............................. 17 3.2 Framsteg och resultat.")
7

8 1 Inledning Den här rapporten beskriver framsteg och resultat inom bildanalys i FoTprojektet ASSM, Adaptiva spektrala spanings- och måligenkänningssensorer som pågår Projektets mål är: 1. Att föreslå, ta fram, värdera och demonstrera sensorer, sensorkombinationer och sensortekniker som förbättrar förmågan till upptäckt, klassificering och identifiering av markmål; 2. Att ta fram, värdera och demonstrera metoder för automatisering av och/eller operatörsstöd för ovanstående (t.ex automatiska måldetektionsmetoder); 3. Att ta fram förslag till design och effektivt nyttjande av multi-/hyperspektrala sensorer och sensortekniker i specifika applikationer. Den här rapporten behandlar alltså de framsteg som hittills gjort för att uppnå mål (2). På lång sikt är projektets syfte att föreslå sensorsystem med förbättrad förmåga till upptäckt, klassificiering och identifiering av markmål (vid såväl mark-till-markspaning som flygspaning). Upptäckt av kamouflerade eller delvis skylda mål är projektets fokus, men tekniken kan även tillämpas på, t.ex, förändringsanalys och mindetektion. 1.1 Multi- och hyperspektrala bilder En multispektral sensor är en elektro-optisk sensor (en kamera) som registrerar bilder i flera våglängdsband. En vanlig digitalkamera kan sägas vara multispektral (våglängdsband för rött, grönt resp. blått), men med ett tämligen litet antal (tre) våglängdsband. Trots detta är det uppenbart att man kan se skillnad på olika material i en färgbild, t.ex kan man se skillnaden mellan asfalt och grönt gräs. Genom att välja de våglängder man tittar på med viss omsorg, och dessutom gärna titta i fler än tre olika band, kan man upptäcka skillnader som det mänskliga ögat inte kan uppfatta, t.ex mellan grön kamouflagefärg och grön vegetation. Om man dessutom väljer sina våglängsband i det termiskt infraröda (IR) området (mellanvågs- eller långvågs-ir) gör man sig oberoende av dagsljus eller aktiv belysning och erhåller alltså mörkerkapacitet. Om man i stället för flera band vill ha många band får man byta till andra sensorteknologier, och gå över till hyperspektrala sensorer. Medan en multispektral sensor typiskt har 4 10 band har en hyperspektral sensor från några dussin till några hundra band, till priset av betydligt lägre bildtakt eller att sensorn är skannande i stället för stirrande (dvs tittar på en linje i stället för en hel bild i taget). 5

9 Både multi- och hyperspektrala sensorer finns på FOI, och beskrivs i, t.ex, [13]. För att använda sig av multi/hyperspektrala bilder krävs som regel olika former av mer eller mindre avancerad bildanalys. Till stor del kan man förstås utnyttja den uppsjö av metoder som finns tillgänglig för vanliga bilder, men vissa problem måste lösas på speciella vis. Den här rapporten beskriver utveckling av sådana metoder som pågår på FOI, och för varje metod förklaras syftet och vad som gör metoden speciell för den här sensortypen. 1.2 Översikt Rapporten innehåller tre kaptiel som vart och ett tar upp en bildanalysmetod. Varje kapitel tar upp bakgrund och motivering, följt av en metodbeskrivning, resultat samt framtid. Metodbeskrivningarna är något mer tekniska (men på en populärvetenskaplig nivå) och kan hoppas över av den som mest är intresserad av resultat och framtid. Kapitel 2 behandlar registrering av bilder, dvs hur man samkalibrerar/linjerar bilder med varandra för att skapa mosaiker/kartor eller för förändringsdetektion. Problemet kan vara lätt eller svårt beroende på omständigheterna i det enklaste fallet är bilderna från samma sensor och (nästan) samma tidpunkt (jämför s.k stitching i konsumentkameror), i det svåraste är sensorna olika (olika band, olika upplösning,...) och bilderna från olika tidpunkter. Kapitel 3 handlar om hur man kan estimera atmosfärs- och målparametrar vid flygspaning med en hyperspektral sensor i långvågs-ir (8 12 µm våglängd). I de våglängderna är atmosfären inte helt transparent, och dessutom en egen källa till strålning. Man vill därför automatiskt kunna kompensera för atmosfärens inverkan och dessuom estimera parametrar hos det mål man spanar mot för att i förlängningen klassificera materialet (Sten? Gräs? Kamouflagefärg?) och dess temperatur. Kapitel 4 innehåller ett mer teoretiskt resonemang för att värdera prestanda hos sensorer. I kapitel 5 sammanfattas resultaten och slutsatserna från kapitel

10 2 Registrering / samkalibrering av heterogena sensorer 2.1 Bakgrund Vid spaning mot markmål med en flygburen sensor är det ofta viktigt eller till och med nödvändigt att registrera bilder till varandra, det vill säga att relatera bildernas koordinater till varandra i varje pixel. Som tidigare nämnts, är korrekt registrering en förutsättning för förändringsdetektion, mosaikbildning, bildfusion och superupplösning. De vanligaste exemplen på registrering är s.k stitching [8] för att skapa panoramabilder, som finns implementerat i vanliga konsumentkameror, samt sammanslagning av flygbilder till en större mosaik. För att kunna sätta ihop bilderna måste man förstås veta hur de ska sättas ihop, det vill säga man måste veta hur den ena bilden ska förskjutas, skevas, förstoras, förminskas, etc. för att den ska passa ihop med den andra. Flera bildexempel ges senare i detta kapitel. Civil bildbehandlingsforskning driven av konsumentmarknaden har på senare år fört tekniken snabbt framåt (med hjälp av metoder som SIFT [12], SURF [6] och multi-band blending [7, 9]), och problemet kan tyckas vara löst. Det finns dock ett antal aspekter som den civila marknaden inte intresserar sig för, och där vi måste bedriva egen forskning och utveckling. ˆ Exempelvis en sensor som MultimIR [13] tar en bild i ett våglängsband, nästa bild i ett annat, osv.. Sekvensen av bilder ska registreras så att man får en stor mosaikbild med alla våglängdsbanden i varje pixel. Eftersom skillnaden i utseende mellan de olika banden är rätt drastisk, klarar de kommersiellt tillgängliga metoderna inte av det. ˆ Ett annat exempel är när vi flugit över ett område med två olika sensorer, t.ex en vanlig kamera och en IR-sensor. Att automatiskt registrera dessa bilder till varandra är betydligt svårare än att registrera bilder från samma typ av sensor. ˆ Ett tredje exempel är att det dessutom kan ha gått lång tid mellan spaningsflygningarna, eller att vi vill registrera mot existerande data, såsom kartunderlag eller satellitbilder. ˆ Slutligen vill vi också kunna registrera data från helt olika sensortyper till varandra, t.ex en hyperspektral sensor (hög spektral upplösning, låg spatiell upplösning) med en 3D-laser (hög spatiell upplösning, 3Dinformation). Förmågan att hantera dessa fall är nödvändig för att designa framtida mångsidiga spaningssystem för kartering, målföljning och förändringsdetektion. 7

11 I avsnitt 2.2 beskrivs tekniken som använts och utvecklats inom projektet. Avsnittet är ganska tekniskt och kan hoppas över för den som vill gå direkt till avsnitt 2.3 där ett antal bildexempel illustrerar resultaten i några av de ovan beskrivna exemplen. Slutligen beskrivs, i avsnitt 2.4 den planerade vidareutveklingen. 2.2 Metodik Bildregistreringsproblemet kan formuleras så att man givet två bilder (en referensbild och en testbild), vill estimera den transform som överför den ena bilden (testbilden) till den andra bildens (referensbilden) koordinatsystem. Transformen inkluderar typiskt skalning, rotation och translation, men kan även inkluder skevning, perspektivförändring, kompensation för linsdistorsion etc. Man kan också uttrycka det som att man vill hitta positionenen och riktningen (och kanske andra parametrar) för testbildens sensor (i förhållande till referensbidens sensor). Man använder sig av två typer av metoder, pixelbaserade och egenskapsbaserade. Pixelbaserade metoder använder bildernas pixelvärden direkt för att hitta den transform som maximerar ett likhetsmått, t.ex korrelationen mellan bilderna. Egenskapsbaserade metoder försöker hitta ett antal lokala egenskaper (nyckelpunkter) i bilderna och matcha dem mot varandra. Fördelar med egenskapsbaserade metoder är att de inte kräver någon intialisering, det vill säga de kan hitta rätt transform även om bilderna är kraftigt transformerade i förhållande till varandra (och man inte känner till hur). De är dessutom beräkningsmässigt snabba. Fördelen med pixelbaserade metoder är att de kan göras generella så tillvida att man inte behöver ha någon särskild förkunskap om ingående sensordata, utom möjligen hur man gör om sensordata till en 2D-bild. Nackdelen är att man måste ha ett ganska bra initialt estimat av transformen, det vill säga sensorernas position Förbehandling I många fall när det gäller att jämföra bilder som kommer från samma sensor eller sensortyp behövs ingen förbehandling av data för att kunna tolka informationen på samma sätt. I svårare fall där man har att göra med data från olika typer av sensorer krävs troligtvis någon slags förbehandling av data för att kunna underlätta registreringen av bilderna mot varandra. Förbehandlingen är tänkt som ett första steg där man konverterar inbilderna för att underlätta den efterföljande beräkningen att estimera en transform (förskjutning, skalning, rotation etc.) som gör att bilderna beskrivs i samma koordinatsystem. Om man exempelvis vill registera en färgbild bestående av tre färgband (röd, grön och blå) mot en gråskalebild med endast ett band behöver man kanske förbehandla färgbilden genom att konvertera även denna till gråskala. Man kan 8
, vill estimera den transform som överför den ena bilden (testbilden) till den andra")
12 även tänka sig fallet då man vill registrera en 2D-bild mot 3D-data. För att kunna åstadkomma en sådan registrering krävs att 3D-datat förbehandlas genom en transformation till en 2D-bild, sedd från (ungefär) samma riktning som 2D-sensorns bild Mjukvaruramverk för registrering Vi har påbörjat utvecklandet av ett generellt ramverk som kan användas både på homo- och heterogena sensordata. Är sensordata inte bilddata (utan, t.ex, 3D-data från en skannande laser) måste information om hur data görs om till en 2D-bild från en given tittriktning och position medfölja data. Systemet försöker sedan optimera fram den transform som maximerar den ömsesidiga informationen mellan de båda dataseten (bilderna). Detta är alltså en pixelbaserad metod. I de fall det är tillämpligt används i stället en egenskapsbaserad metod. Optimeringsproblemet för den pixelbaserade metoden har visat sig vara svårare än väntat, medan den implementerade egenskapsbaserade metoden visat sig vara effektiv även på heterogena sensordata. Nedan redogörs därför för den senare Egenskapsbaserad metod Den valda metoden bygger på den automatiska stitching -algoritmen beskriven i [9]. Nedan följer en kort beskrivning av det implementerade registreringsverktyget Nyckelpunktsberäkning Egenskapsbaserade metoder bygger på att man beräknar stabila nyckelpunkter i data och därefter jämför nyckelpunkterna för testbilden och referensbilden för att hitta matchande nyckelpunkter. Därefter esitimeras en transformation som åstadkommer att positionerna för testbildens nyckelpunkter överensstämmer med positionerna för referensbildens nyckelpunkter. I projektet har vi tagit fram en egenskapsbaserad metod som använder nyckelpunkter beräknade med SIFT (Scale Invariant Feature Transform). SIFTpunkter beräknas med en algoritm som publicerades 1999 av David Lowe [12] och är populär i stitching -mjukvara [8]. Algoritmen hittar extrempunkter i en skal-rymd (en 3D-rymd skapad genom omskalningar av bilden) och för var och en av dessa beräknas en orientering. Genom att i den aktuella skalan och orienteringen beräkna en egenskapsvektor (deskriptor) bestående av de lokala gradienterna kan man generera nyckelpunkter med egenskaper som är invarianta mot skalning, orientering, belysning och translation. För att ytterligare stärka invariansen mot belysning beräknas nyckelpunkter för såväl originalbilderna som bilderna då gråskalevärdena inverteras. 9
 måste information om hur data görs om till en 2D-bild från en given tittriktning och position medfölja data.")
13 Figur 2.1: Exempel på registrering. Testbilden (övre höger) har skapats genom att beskära, skala, skjuva och invertera färgerna i referensbilden (övre vänster). I dessa bilder visas de matchande nyckelpunkter som algoritmen funnit. Resultatet av registreringen (nedre vänster) visar hur testbilden sedan transformerats för att passa referensbilden. Nere till höger visas det framtagna användargränssnittet Nyckelpunktsmatchning och transform Efter att nyckelpunkter har beräknats i den aktuella testbilden och referensbilden, utförs en matchning mellan nyckelpunkterna. Matchningen av nyckelpunkter görs med hjälp av sökmetoden RANSAC (RANdom SAmple Consensus, [11]) som hittar de nyckelpunkter som är förenliga med en på förhand vald modell av den transformation som krävs för att få överensstämmelse mellan bilderna. Metoden hittar när den är framgångsrik såväl de matchande nyckelpunkterna som den sökta transformen. Slutligen transformeras testbilden så att den hamnar i samma koordinatsystem som referensbilden. Figur 2.1 visar ett registreringsexempel med matchande nyckelpunkter utmärkta. 10

14 2.3 Resultat Följande stycken visar några exempel på resultat genererade med bildregisteringsverktyget Olika våglängdsband (sensorfusion) Figur 2.2 visar ett exempel från MultimIR som samlar in data i fyra våglängdsband i kortvågs- och mellanvågs-ir. Sensorn arbetar genom att sekventiellt avbilda markområdet: Först tas en bild i det första våglängsbandet, sedan det andra, det tredje, det fjärde och därefter börjar man på det första våglängdsbandet. Detta fortsätter tills hela det önskade området mätts in. Eftersom data vanligtvis samlas in från en flygande plattform hinner sensorn flytta sig mellan varje insamlad bild. Figuren visar de fyra våglängdsbanden före och efter att banden registrerats med det första våglängdsbandet som referensbild. I exemplet är det tydligt att de olika bilderna skiljer sig åt vad det gäller intensiteten hos olika objekt, och tydliga svart-vita kanter i en bild kan vara vit-svarta eller ha försvunnit i en andra. I detta fall har ingen förbehandling av bilderna gjorts för att underlätta registrering. SIFT-metodens inbyggda robusthet mot intensitetsskillnader p.g.a. att den använder gradienter samt vårt tillägg att även beräkna nyckelpunkter för bilderna då deras gråskala inverteras har gett en god matchning mellan bilderna Olika sensorer (sensorfusion) Figur 2.3 visar ett exempel med två flygfoton från samma markområde. Skillnaden mellan bilderna är att de samlats in med två olika sensorer. Den första bilden (Figur 2.3(a)) är en färgbild och den andra är en gråskalebild (Figur 2.3(b)). Färgbilden visar ett mindre område och kräver en transformation där bilden roteras, skalas och translateras för passa ihop med gråskalebilden. För att utföra registreringen förbehandlas färgbilden till gråskala genom att medelvärdesbilda de tre separata färgkanalerna. Figur 2.3(c) visar resultatet efter den automatiska registreringen Olika tidpunkter (förändringsanalys) Registreringsexemplet i Figur 2.4 visar data från sensorn Emerald [13] insamlade vid två tidpunkter. I båda bilderna finns ett par fordon, men dessa har förflyttats mellan tidpunkterna för bilderna. Genom att registrera bilderna mot varandra är det möjligt att producera en förändringsbild (Figur 2.4(c)) som markerar förändringar mellan bilderna. Ljusa punkter visar fordon som finns i Figur 2.4(a) men inte Figur 2.4(b) och vice versa för mörka objekt. 11


15 (a) Oregistrerade bilder (b) Registrerade bilder Figur 2.2: Registrering av bilder från olika våglängdsband i kortvågs- och mellanvågs- IR. 12

16 FOI-R SE (a) Oregistrerad fa rgbild (b) Referensbild i svart-vitt (c) Registrerad bild o verlagrad pa referensbild Figur 2.3: Registering av ett flygfoto i fa rg mot ett flygfoto i gra skala. Flygfoton: Copyright Lantma terieverket Ga vle Ref. no. L2002/308 13

17 (a) Kl. 08:36 (b) Kl. 09:23 (c) Förändringsbild Figur 2.4: Exempel på hur man kan analysera förändringar mellan bilder insamlade vid olika tidpunkter. 14

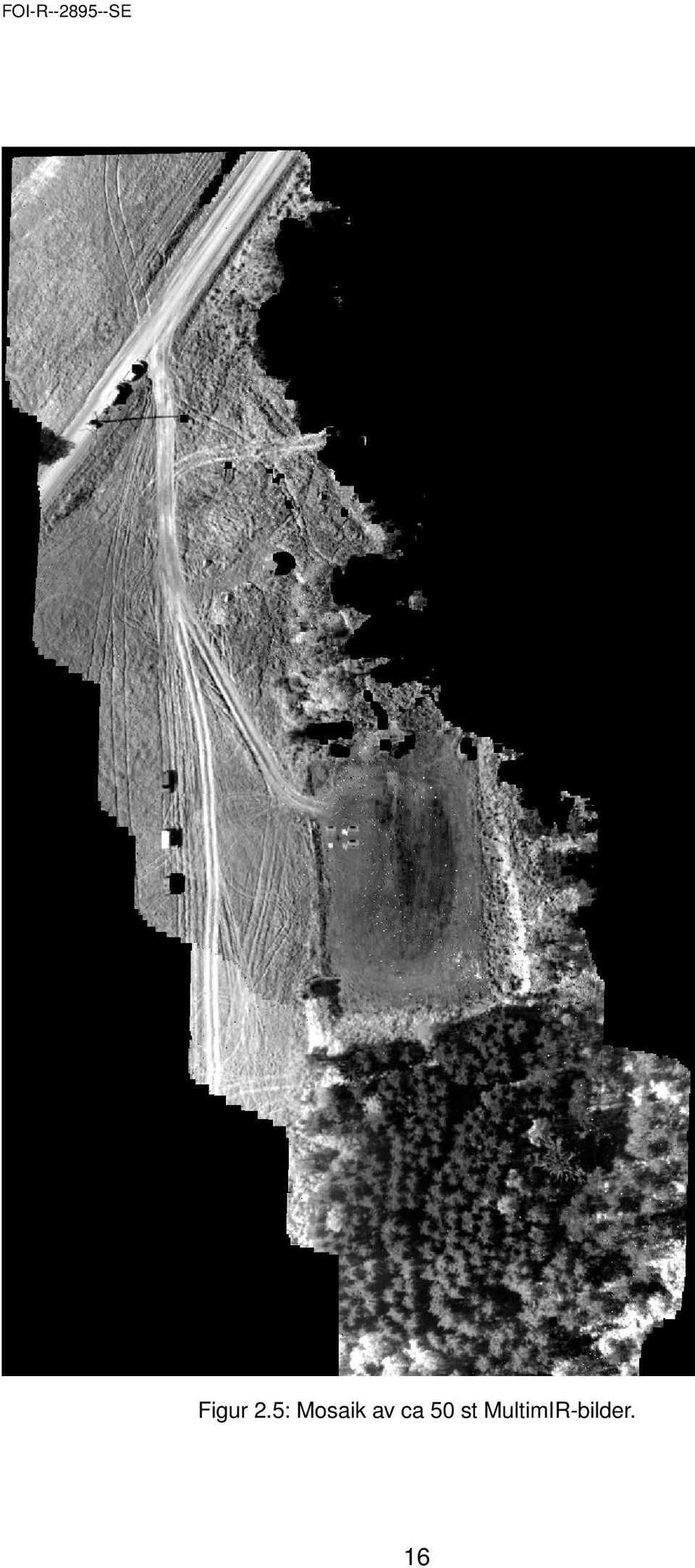
18 2.3.4 Mosaikbildning (kartering) En annan viktig applikation som registreringsverktyget ska utföra är att producera sammanhängande mosaiker från många delbilder, det vill säga stitching. Figur 2.5 visar ett våglängdsband i en mosaik bestående av ca 50 st delbilder från MultimIR. 2.4 Framtid Föregående bildexempel visar att vårt registreringsverktyg har potential att lösa de problem som den civila marknadens bildregistreringsverktyg inte fokuserat på. Flera av de önskade funktionerna är implementerade och fungerar. Däremot krävs en vidareutveckling av metodiken och ramverket för att få ett mer strömlinjeformat registreringsverktyg. Några av de uppgifter som behöver vidareutvecklas och implementeras är: ˆ Automatiskt val av vilka bilder som ska höra ihop i en mosaik. I dagsläget produceras en mosaik genom att utgå från en bild. Därefter registreras nästa bild, som förutsätts ha ett överlapp med den föregående bilden, mot den första och en ny sammanslagen bild skapas, och så vidare. ˆ För visualisering bör sammanslagning av bilder i en mosaik utföras på ett sätt så att skarvarna inte syns, t.ex genom multi-band bledning. Det framtagna verktyget lägger enbart den nya överlappande bilden över den gamla, utan att blanda bilderna på något sätt. ˆ För analys bör sammanslagning av bilder i en mosaik utföras på ett sätt så att superupplösning uppnås genom att utnyttja att bildernas bildpunkter ligger något olika. Ju fler överlappande bilder vi har, desto högre upplösning får vi alltså. ˆ Mera djupgående studier av vilka förbehandlingar som krävs för att data från väldigt skilda sensortyper ska kunna registreras mot varandra. Var går gränsen för vad som är möjligt med den nuvarande metoden? ˆ Vidareutveckling av användargränssnittet för att på ett enkelt sätt kunna styra alla önskvärda funktioner. ˆ Olika metoder för att hantera bilder med flera band. Vilka/vilket band ska användas som referensbild? Hur ska multispektrala bilder förbehandlas på bästa sätt för att få en bra registrering? 15

19 Figur 2.5: Mosaik av ca 50 st MultimIR-bilder. 16
20 3 Atmosfärskorrektion i hyperspektralt termiskt infrarött 3.1 Bakgrund Tänk dig en flygfarkost som spanar mot markmål. Flygfarkosten håller sig på några hundra meters till ett par kilometers höjd och är utrustad med en spaningssensor. Sensorn är hyperspekral för att kunna se skillnad på olika material och opererar i långvågsinfrarött (8 12 µm) för att ha dygnet-runtkapacitet. Alla material karaktäriseras av sitt emissivitetsspektrum ɛ, ett värde mellan 0 och 1 som för varje våglängd berättar hur mycket värmestrålning materialet emitterar vid just den våglängden. Om man kan mäta emissiviteten kan man alltså låta datorn slå upp vilket material man tittar på, och således för varje pixel i bilden få veta om det är, t.ex, en pansarpixel, granpixel eller kamouflagenätspixel. Tyvärr kan man inte mäta emissiviteten direkt, eftersom: ˆ Den emitterade strålningen även är temperaturberoende (emissiviteten multipliceras med Plancks svartkroppsfunktion för den givna temperaturen). ˆ Materialet även reflekterar strålning (det vi vanligen ser utomhus är ju reflekterad solstrålning), beroende på materialets reflektans ρ (som är lika med 1 ɛ). ˆ Atmosfären inte är transparent, utan har en transmission som varierar från 0 (helt ogenomskinlig) till 1 (helt genomskinlig). ˆ Atmosfären också strålar (emitterar). För korta avstånd är atmosfären tämligen transparent, men i vårt scenario, där målet befinner sig någon kilometer bort, gör den stor skillnad. Det vi faktiskt ser med vår sensor är alltså L obs = τ (ρ I + ɛ L bb ) + A, (3.1) där τ är atmosfärstransmissionen, L bb är Plancks svartkroppsfunktion [5], I är den infallande strålningen (t.ex från himlen), A är strålningen från atmosfären in mot sensorn och ρ är materialets reflektans. Det hela illustreras i Figur 3.1. Alltså: Om vi visste värdena på A, τ, I samt objektets temperatur skulle vi kunna räkna ut ɛ, och därmed klassificera objektet. Vi skulle alltså kunna materialbestämma varje pixel i bilden, även i mörker. Lyckligtvis går A, τ och I att simulera med programvaror som MODTRAN [10], men då krävs att man känner parametrar som lufttemperatur och luftfuktighet. Objektets temperatur känner vi inte heller (visste vi det skulle vi 17

21 Figur 3.1: 1. Strålning från omvärlden reflekteras i objektet och transmitteras genom atmosfären. 2. Objektet emitterar värmestrålning som transmitteras genom atmosfären. 3. Atmosfären emitterar även den värmestrålning. Sensorn mäter den summerade strålningen L obs. nog inte behöva spana mot det), men det är här finessen med en hyperspektral sensor kommer in med vissa begränsningar på hur emissivitetsfunktionen ɛ ser ut kan man estimera såväl den som objektets temperatur. Och de okända atmosfärsparametrarna! 3.2 Framsteg och resultat Redan 2006 utvecklade vi metoder för att estimera atmosfärsparametrarna från bilddata [2]. Genom att anta att det vi tittar på är en gråkropp (emissiviteten ɛ har samma värde i alla våglängder) så kan vi samtidigt estimera atmosfärsparametrarna, objektets emissivitet, samt objektets temperatur. Objekt som inte är gråkroppar kommer att ge stora modellfel, men så länge vi kan hitta ett antal gråkroppspixlar i bilden, t.ex vegetation, kan vi göra ett någorlunda bra estimat av atmsosfärsparametrarna. Studien 2006 visade att spektralband (med måttligt sensorbrus) behövs för att göra estimatet. Som resultat kan man därför till stor del ta bort effekterna av atmosfären, och analysera objekten man spanar mot. Vi har tidigare visat hur vi kan se skillnad mellan viss kamouflagefärg och såväl naturlig bakgrund som andra typer 18
22 av varma objekt [3]. Under 2009 återupptogs arbetet med syftet att införa förhandskunskap i beräkningen. I den tidigare beräkningsmetoden släpptes parametrar såsom atmosfärstemperatur fria. En uppdaterad metod har tagits fram där man kan ange estimat av atmosfärens temperatur och fuktighet samt sensorns brusnivå kunskap som det är högst sannolikt att man har. Estimaten av objektegenskaperna bör därför kunna förbättras, men hittills saknas laboratoriemätningar som kan bekräfta detta. 3.3 Framtid I den nära framtiden ska den uppdaterade beräkningsmetoden dokumenteras, valideras med mätdata, samt utsättas för internationell granskning och publicering. På längre sikt ska metoden anpassas för stora scener, det vill säga estimat ska göras över hela bilder eller utefter flygstråk, vilket i sin tur möjliggör materialklassificering och måldetektion vid spaningsuppdrag. Metoden ska vara i drift inför fältförsök inom EDA-projektet DUCAS [1], fältförsök som ska genomföras i Belgien under
23
24 4 Informationsmått för sensorprestandavärdering 4.1 Bakgrund För att avgöra en sensors detektionsförmåga har många olika mått definierats. Ursprungligen användes manuella mått, där en operatör skulle avgöra om han kunde urskilja ett antal svart-vita fält på en avbildad tavla. Med automatiska detektionsalgoritmer blir det i stället mer relevant att avbilda ett antal kända mål och föra statistik på hur stor andel av målen som detekterades vs. antalet falska detektioner. Vanligen plottas de mot varandra i ROC-kurvor, se Figur 4.1. ROC-kurvor medför två problem. För det första är det inte entydigt vad som är bra. Två kurvor kan t.ex mycket väl korsa varandra (Figur 4.1(a)). För att lösa det används olika mått som detektionssannolikhet vid en given högsta tolererad falsklarmssannolikhet (Figur 4.1(b)). Ett annat mått är AUC ( Area Under Curve ), vanligen definierad som ytan under ROC-kurvan i ett visst intervall av falkslarmssannolikhet, t.ex 0 10% (Figur 4.1(c)). Ett annat problem är att det man mäter med ROC-kurvan är hela systemets prestanda, medan man ofta vill veta sensorns prestanda, det vill säga vad som vore möjligt att åstadkomma givet en optimal detektionsalgoritm. Ett sådant mått skulle göra det möjligt att värdera sensorkonfigurationer, samt även att värdera systemets potential om prestanda för systemet är långt ifrån den optimal prestandan för en given sensor bör man lägga mer energi på att utveckla detektionsalgoritmer. Vi föreslår därför ett informationsteoretiskt mått som givet en hyperspektral bild från en given sensorkonfiguration och en målmask (ett facit, vilka pixlar/spektrala signaturer är mål respektive bakgrund) ger en kurva som talar om hur mycket information sensorn ger om huruvida en pixel är mål eller bakgrund. Måttet går dessutom att relatera till ROC-kurvan och pekar ut vilken punkt på kurvan som är den mest informationsrika, det vill säga vilken punkt som därmed bör jämföras med konkurrerande sensorkonfigurationer. 4.2 Metod Vi betraktar en pixel från en hyperspektral sensor. Pixeln visar antingen (en liten del av) ett mål eller bakgrunden, vilket vi kan betrakta som en binär variabel (0 eller 1) som beskriver pixelns tillstånd. Beroende på vilket tillstånd den har, har pixeln en spektral signatur hämtad från en målmängd eller en bakgrundsmängd. Är mängderna helt åtskilda kan vi i teorin göra en perfekt mål/bakgrundsdiskriminering. I verkligheten är de oftast överlappande. Den spektrala signaturen utsätts sedan för ett antal transformer. Den ska 21
25 (a) Korsande ROC-kurvor. Den röda kurvan beskriver ett bättre system (högre detektionssannolikhet för varje falsklarmssannolikhet), men är den gröna eller blå kurvan bäst? (b) Detektionssannolikhet kan jämföras vid en given falsklarmssannolikhet. (c) Area Under Curve för ett givet falsklarmssannolikhetsintervall. Figur 4.1: ROC-kurvor ( Receiver Operating Characteristics ) 22
26 exempelvis passera genom luften (se föregående kapitel) och sedan mätas av sensorn (vilket medför effekter som sensorbrus och kvantisering (digitalisering)). Mål- respektive bakgrundmängderna av digitaliserade observerade signaturer är alltså det sensorn ger, och en måldetektionsalgoritm försöker lista ut vilken mängd en varje sådan signatur tillhör. Naturligtvis försöker man även göra en del trick för att förenkla detektionsalgoritmens uppgift, exempelvis genom sådan atmosfärskompensation som beskrev i förra kapitlet, men vi betraktar här hela systemet från mål/bakgrund till digital signatur, men utan detektionsmetod. Som vi visat tidigare [4] kan vi från testdata estimera hur mycket information en sensor ger om en pixels tillstånd (mål/bakgrund). Resultatet blir ett värde mellan noll och en bit, och därmed går även två olika sensorkonfigurationer att jämföra genom att beräkna informationsmåttet för båda. Vi utökar nu resonemanget genom att sortera alla signaturer i vår testdatamängd efter hur ofta de förekommer i målmängden dividerat med hur ofta de förekommer i bakgrundmängden. Vi beräknar därefter informationsmåttet för bara den första signaturen, sedan för den första och den andra, osv., tills man har använt alla tillgängliga signaturer. Man får då typiskt en kurva som i Figur 4.2(a). Kurvan har en tydlig maxpunkt, som liksom det tidigare föreslagna måttet kan användas för att karakterisera sensorprestanda. Det intressanta är att varje punkt på informationskurvan motsvarar en punkt på en ROC-kurva (se Figur 4.2(b)). Det går också att för varje punkt på en ROC-kurva associera ett informationsmått. Vi har alltså ett godhetsmått på varje punkt på ROC-kurvan! Så hur gör vi? Jo, i vår testdatamängd har vi ett antal spektrala signaturer. Vi börjar med att plocka de signaturer som bara finns i målmängden och klassificera dem som just mål. Genom att klassificiera endast dessa signaturer som mål (och övriga som bakgrund) får vi antagligen en låg detektionssannolikhet, men en falsklarmssannoliket lika med noll. Vi fortsätter med att plocka signaturer i fallande ordning efter kvoten mellan hur ofta signaturen förekommer i målmängden och hur ofta den förekommer i bakgrundsmängden. För varje steg kan vi beräkna vårt informationsmått (en punkt på informationskurvan) samt en punkt på ROC-kurvan. ROC-kurvan blir den optimala, det vill säga den bästa som teoretiskt går att uppnå på den givna testdatamängden med en spektral detektor. 4.3 Resultat Vi exemplifierar här med testdata från en 32-bands hyperspektral sensor. Bilden (Figur 4.3) visar ett antal minor utlagda i naturlig bakgrund (mestadels gräs). Vi har även tillgång till en målmask som visar vilka pixlar som är målpixlar och vilka som är bakgrundspixlar. Från bilden sorterar vi alla spektrala signaturer (enligt ovan), och börjar med att klassificera den första signaturen som mål och alla andra som bakgrund. Och så vidare. För varje 23
27 steg plottar vi informationsmåttet, och får informationskurvan i Figur 4.2(a), samt ROC-kurvan (Figur 4.2(b)). Vi ser att när vi nått en detektionssannolikhet på 0.74 (och en falsklarmssannolikhet på 0.046) har vi maximerat informationsmåttet för den aktuella testdatamängden och sensorkonfigurationen. De motsvarande detektionsbilderna finns i Figur 4.4, och för det mänskliga ögat ser antagligen den första detektionsbilden bäst ur. Detta beror på att vi lägger in spatiella resonemang och automatiskt detekterar ett antal objekt, medan detektionssannolikheten här anges per pixel och inte per objekt. Vi kan nu jämföra med en annan sensorkonfiguration. I Figur 4.5 ser vi detektionsbild och informationskurva för samma indata, men vi har bara använt åtta av de 32 spektralbanden. Resultatet blir ett informationsinnehåll på maximalt 0.30 bit per pixel (i stället för 0.41). Exemplet är övertydligt eftersom det går att se på detektionsbilden att prestanda är sämre, men illustrerar ändå det faktum att vi har en siffra som anger sensorns prestanda, och som applicerade detektionsmetoder kan benchmarkas mot. 4.4 Framtid Det föreslagna måttet kommer att användas vid sensorprestandavärderingar i framtida experiment, och skall även utsättas för internationell granskning och publicering. Det föreslagna måttet kommer även att användas för att benchmarka existerande och kommande detektionsmetoder. 24
28 0.45 Informationskurva (a) Informationskurva. De tre markeringarna visar informationsinnehåll (I) på 0.26, 0.41 respektive 0.15 bit per pixel. x-axeln visar antalet spektrala signaturer som tagits med i beräkningen. 1 ROC kurva Detektionssannolikhet Falsklarmssannolikhet (b) De tre markeringarna visar detektionssannolikheterna (P D ) 0.43, 0.74 respektive 0.97 samt falsklarmssannolikheterna (P F ) , respektive Figur 4.2: Informationskurva och motsvarande ROC-kurva. 25
 Målmasken ( facit ). Vita pixlar är minor, svarta är bakgrund. Figur 4.")
29 (a) Tre band ur den hyperspektrala bilden visualiserade som en färgbild. (b) Målmasken ( facit ). Vita pixlar är minor, svarta är bakgrund. Figur 4.3: Testdatamängden. 26

30 (a) P D = P F = I = (b) P D = P F = I = (c) P D = P F = I = Figur 4.4: Detektionsbilder motsvarande markeringarna i kurvorna i Figur 4.2. Mittenbilden är alltså den som ger mest information om mål/bakgrundstillståndet. 27
31 Figur 4.5: Detektionsbild (vid maximalt informationsinnehåll) och informationskurva för en sensor med åtta band. 28
32 5 Slutsatser Vi har i den här rapporten beskrivit pågående arbete på tre olika bildanalysmetoder för tre olika ändamål. Alla tre är nödvändiga för att designa sensorsystem för att uppnå den eftertraktade förmågan att kunna spana mot ett område och detektera avvikelser, förändringar samt specifika signaturer. Den generella slutsatsen är att vi har kommit några steg på vägen, men att flera delförmågor återstår att studera och/eller utveckla. 5.1 Registrering Registrering (samkalibrering) är en förutsättning för att kunna utnyttja data över samma område från flera sensorer. En metod för registrering (samkalibrering) av heterogena sensorer har implementerats och resultat visats. Metoden bygger på teknik utvecklad för konsumentmarknaden, och fungerar väl för visuella och infraröda bilder i olika våglängder. Vidare studier behövs för att möjliggöra sensordatafusion för att åstadkomma superupplösning (spatiellt eller spektralt), för att förenkla mosaikbildning, och för att på bästa sätt hantera andra typer av sensordata (t.ex hyperspektralt, linjeskannad data och 3D-laser). 5.2 Atmosfärskorrektion i hyperspektralt termiskt infrarött En metod för att estimera atmosfärens vatteninnehåll och temperatur i en scen har visats, vilket medför att man kan korrigera för atmosfärens inverkan och räkna ut de verkliga signaturerna hos objekt på marken. Det möjliggör i sin tur att man kan detektera specifika signaturer och klassa pixlar efter material. Sådan signaturklassificering är ett kommande arbete i projektet. 5.3 Informationsmått för sensorprestandavärdering Ett mått för att värdera en sensors prestanda givet en scen med kända mål har beskrivits. Måttet har två fördelar jämfört med den vanligast metoden (ROClurvor); dels ger måttet en siffra och inte en hel kurva, dels är det oberoende av måldetektionsmetod. 29
33
34 Litteraturförteckning [1] J. Ahlberg, DUCAS statusrapport, FOI Memo 2983, December [2] J. Ahlberg, Estimation of atmosphere and object properties in hyperspectral longwave infrared data, Vetenskaplig rapport FOI-R SE, Oktober [3] J. Ahlberg and I. Renhorn, Analysis of Hyperspectral Longwave Infrared Imagery, Vetenskaplig rapport FOI-RH SE, December [4] J. Ahlberg and I. Renhorn, An information-theoretic approach to band selection, Proceedings of SPIE Vol. 5811, Targets and Backgrounds XI: Characterization and Representation, pp , Orlando, FL, April [5] M. Alonso and E. J. Finn, Physics, Addison-Wesley, [6] H. Bay, A. Ess, T. Tuytelaars, L. Van Gool, SURF: Speeded Up Robust Features, Computer Vision and Image Understanding (CVIU), Vol. 110, No. 3, pages , [7] P. J. Burt and E. H. Adelson, A multiresolution spline with application to image mosaics, ACM Transactions on Graphics, Vol. 2, No. 4, pages , [8] M. Brown and D. Lowe, AutoStitch :: a new dimension in automatic image stitching, mbrown/autostitch/autostitch.html [9] M. Brown and D. Lowe, Automatic Panoramic Image Stitching using Invariant Features, International Journal of Computer Vision, Vol. 74, No. 1, pages 59 73, [10] MODTRAN R 5, [11] M. Fischler and R. Bolles, Random sample consensus: A paradigm for model fitting with application to image analysis and automated cartography, Communications of the ACM, Vol. 24, pages , [12] D. Lowe, Object Recognition from Local Scale-Invariant Features, Proceedings of the International Conference on Computer Vision (ICCV), pages , Corfu, Greece, September [13] T. Svensson et al., Multi- och hyperspektral spaning slutrapport, Användarrapport FOI-R SE, FOI, December
Samtidig mätning av infraröd- och radaregenskaper Beskrivning av nytt materialmätsystem vid FOI
 Samtidig mätning av infraröd- och radaregenskaper Beskrivning av nytt materialmätsystem vid FOI Jan-Olof Ousbäck, Anna Pohl, Hans Kariis FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet.
Samtidig mätning av infraröd- och radaregenskaper Beskrivning av nytt materialmätsystem vid FOI Jan-Olof Ousbäck, Anna Pohl, Hans Kariis FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet.
Kodning av ansiktstextur med oberoende komponenter
 Kodning av ansiktstextur med oberoende komponenter Jörgen Ahlberg Report no. LiTH-ISY-R-2297 ISSN 1400-3902 Avdelning, Institution Division, department Datum Date Image Coding Group 2000-10-02 Department
Kodning av ansiktstextur med oberoende komponenter Jörgen Ahlberg Report no. LiTH-ISY-R-2297 ISSN 1400-3902 Avdelning, Institution Division, department Datum Date Image Coding Group 2000-10-02 Department
Fingerprint Matching
 Fingerprint Matching Björn Gustafsson bjogu419 Linus Hilding linhi307 Joakim Lindborg joali995 Avancerad bildbehandling TNM034 Projektkurs Biometri 2006 1 Innehållsförteckning 1 Innehållsförteckning 2
Fingerprint Matching Björn Gustafsson bjogu419 Linus Hilding linhi307 Joakim Lindborg joali995 Avancerad bildbehandling TNM034 Projektkurs Biometri 2006 1 Innehållsförteckning 1 Innehållsförteckning 2
L A B R A P P O R T 1
 L A B R A P P O R T 1 BILDTEKNIK Dan Englesson Emil Brissman 9 september 2011 17:04 1 Camera noise 1.1 Task 1 Ett antal svarta bilder togs genom att fota i totalt mörker för att beräkna kamerans svartnivå.
L A B R A P P O R T 1 BILDTEKNIK Dan Englesson Emil Brissman 9 september 2011 17:04 1 Camera noise 1.1 Task 1 Ett antal svarta bilder togs genom att fota i totalt mörker för att beräkna kamerans svartnivå.
Högupplösta geodata och 3D omvärldsmodeller - nuvarande och framtida möjligheter ur ett FOI-perspektiv
 Högupplösta geodata och 3D omvärldsmodeller - nuvarande och framtida möjligheter ur ett FOI-perspektiv Dr. Gustav Tolt FOI Avd. för Informationssystem Linköping Agenda Introduktion Framställning av 3D
Högupplösta geodata och 3D omvärldsmodeller - nuvarande och framtida möjligheter ur ett FOI-perspektiv Dr. Gustav Tolt FOI Avd. för Informationssystem Linköping Agenda Introduktion Framställning av 3D
2011 Studsvik AB PANORAMA-BILDTAGNING. Tony Björkman
 2011 Studsvik AB Tony Björkman PANORAMA-BILDTAGNING Filminspelning och visuell inspektion är två beprövade metoder för avsyning av bränslestavar. Ett nytt sätt att avsyna är att skapa panoramabilder vilket
2011 Studsvik AB Tony Björkman PANORAMA-BILDTAGNING Filminspelning och visuell inspektion är två beprövade metoder för avsyning av bränslestavar. Ett nytt sätt att avsyna är att skapa panoramabilder vilket
Samverkande sensorer. FOI Totalförsvarets forskningsinstitut Tel: 013-37 80 00 www.foi.se Sensorsystem Fax: 013-37 81 00 Box 1165 581 11 Linköping
 Samverkande sensorer Tomas Chevalier FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet. Kärnverksamheten är forskning, metod- och teknikutveckling till nytta för försvar
Samverkande sensorer Tomas Chevalier FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet. Kärnverksamheten är forskning, metod- och teknikutveckling till nytta för försvar
Att använda bildhanteringsprogram, del 2
 Att använda bildhanteringsprogram, del 2 Gå till Adobe Online (M) Markeringsram - (L) Lasso - (C) Beskärning - (J) Airbrush - (S) Klonstämpel - (E) Suddgummi - (R) Oskärpa - (A) Markering av bankomponenter
Att använda bildhanteringsprogram, del 2 Gå till Adobe Online (M) Markeringsram - (L) Lasso - (C) Beskärning - (J) Airbrush - (S) Klonstämpel - (E) Suddgummi - (R) Oskärpa - (A) Markering av bankomponenter
Bildanalys för vägbeläggningstillämplingar
 Bildanalys för vägbeläggningstillämplingar Hanna Källén I denna avhandling har några forskningsfrågor gällande bestämning av vägars beständighetundersökts. Bildanalys har används för att försöka komplettera
Bildanalys för vägbeläggningstillämplingar Hanna Källén I denna avhandling har några forskningsfrågor gällande bestämning av vägars beständighetundersökts. Bildanalys har används för att försöka komplettera
Misslyckade angrepp av granbarkborrar - Slutrapport
 Misslyckade angrepp av granbarkborrar - Slutrapport Niklas Björklund & Bo Långström Institutionen för Ekologi, SLU. Bakgrund En pilotstudie år 2008 visade att misslyckade angrepp av granbarkborre förekommer
Misslyckade angrepp av granbarkborrar - Slutrapport Niklas Björklund & Bo Långström Institutionen för Ekologi, SLU. Bakgrund En pilotstudie år 2008 visade att misslyckade angrepp av granbarkborre förekommer
Simulering av brand i Virtual Reality
 Simulering av brand i Virtual Reality Bakgrund Användningen av virtual reality (VR, virtuell verklighet) som ett forskningsverktyg inom brandteknik och utrymning har på senare tid visat sig vara mycket
Simulering av brand i Virtual Reality Bakgrund Användningen av virtual reality (VR, virtuell verklighet) som ett forskningsverktyg inom brandteknik och utrymning har på senare tid visat sig vara mycket
Laboration i Fourieroptik
 Laboration i Fourieroptik David Winge Uppdaterad 4 januari 2016 1 Introduktion I detta experiment ska vi titta på en verklig avbildning av Fouriertransformen. Detta ska ske med hjälp av en bild som projiceras
Laboration i Fourieroptik David Winge Uppdaterad 4 januari 2016 1 Introduktion I detta experiment ska vi titta på en verklig avbildning av Fouriertransformen. Detta ska ske med hjälp av en bild som projiceras
Optiska ytor Vad händer med ljusstrålarna när de träffar en gränsyta mellan två olika material?
 1 Föreläsning 2 Optiska ytor Vad händer med ljusstrålarna när de träffar en gränsyta mellan två olika material? Strålen in mot ytan kallas infallande ljus och den andra strålen på samma sida är reflekterat
1 Föreläsning 2 Optiska ytor Vad händer med ljusstrålarna när de träffar en gränsyta mellan två olika material? Strålen in mot ytan kallas infallande ljus och den andra strålen på samma sida är reflekterat
Kontaktperson Datum Beteckning Sida Torsten Sjögren 2015-09-25 3P05868 1 (8) SP Bygg & Mekanik 010-516 52 49 Torsten.Sjogren@sp.se
 SP Bygg & Mekanik 010-516 52 49 Torsten.Sjogren@sp.se") Kontaktperson Torsten Sjögren 2015-09-25 3P05868 1 (8) SP Bygg & Mekanik 010-516 52 49 Torsten.Sjogren@sp.se Ångpanneföreningens Forskningsstiftelse Frösundaleden 2 169 99 STOCKHOLM SLUTRAPPORT (Ref. nr.
Kontaktperson Torsten Sjögren 2015-09-25 3P05868 1 (8) SP Bygg & Mekanik 010-516 52 49 Torsten.Sjogren@sp.se Ångpanneföreningens Forskningsstiftelse Frösundaleden 2 169 99 STOCKHOLM SLUTRAPPORT (Ref. nr.
Värderingsaspekter inom Försvarsmaktens IT-säkerhetsarbete
 Värderingsaspekter inom Försvarsmaktens IT-säkerhetsarbete Johan Bengtsson, Jonas Hallberg FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet. Kärnverksamheten är forskning,
Värderingsaspekter inom Försvarsmaktens IT-säkerhetsarbete Johan Bengtsson, Jonas Hallberg FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet. Kärnverksamheten är forskning,
http://www.leidenhed.se Senaste revideringen av kapitlet gjordes 2014-05-08, efter att ett fel upptäckts.
 Dokumentet är från sajtsidan Matematik: som ingår i min sajt: http://www.leidenhed.se/matte.html http://www.leidenhed.se Minst och störst Senaste revideringen av kapitlet gjordes 2014-05-08, efter att
Dokumentet är från sajtsidan Matematik: som ingår i min sajt: http://www.leidenhed.se/matte.html http://www.leidenhed.se Minst och störst Senaste revideringen av kapitlet gjordes 2014-05-08, efter att
RSI Road Status Information A new method for detection of road conditions
 WP 5 Sida 1 av 15 RSI Road Status Information A new method for detection of road conditions Användarmanual för RSI WP 5 Sida 2 av 15 Användarmanual för RSI Om detta dokument Detta dokument är en användarmanual
WP 5 Sida 1 av 15 RSI Road Status Information A new method for detection of road conditions Användarmanual för RSI WP 5 Sida 2 av 15 Användarmanual för RSI Om detta dokument Detta dokument är en användarmanual
DIGITAL RASTRERING. DIGITALA BILDER (pixelbaserad) ppi (pixels per inch) Sasan Gooran
 ppi (pixels per inch) Sasan Gooran") DIGITAL RASTRERING Sasan Gooran 1/8/15 Grafisk teknik 1 DIGITALA BILDER (pixelbaserad) Skanning Foto Digital bild ppi: Antalet sampel per tum 1/8/15 Grafisk teknik 2 ppi (pixels per inch) ppi (Inläsningsupplösning):
DIGITAL RASTRERING Sasan Gooran 1/8/15 Grafisk teknik 1 DIGITALA BILDER (pixelbaserad) Skanning Foto Digital bild ppi: Antalet sampel per tum 1/8/15 Grafisk teknik 2 ppi (pixels per inch) ppi (Inläsningsupplösning):
Bilaga 3: Formulär för Fas 2-rapport
 Datum/Date Dnr/Ref.no. 2015-08-20 137-KB 415-2014 Bilaga 3: Formulär för Fas 2-rapport 1.1. Uppgifter om Innovationsdeltagaren Innovationsdeltagare: MBV Systems AB Person- eller organisationsnummer: 556644-4229
Datum/Date Dnr/Ref.no. 2015-08-20 137-KB 415-2014 Bilaga 3: Formulär för Fas 2-rapport 1.1. Uppgifter om Innovationsdeltagaren Innovationsdeltagare: MBV Systems AB Person- eller organisationsnummer: 556644-4229
Rapport från Läkemedelsverket
 Utveckla märkning av läkemedelsförpackningar för att minska risken för förväxlingar Rapport från Läkemedelsverket Juni 2012 Postadress/Postal address: P.O. Box 26, SE-751 03 Uppsala, SWEDEN Besöksadress/Visiting
Utveckla märkning av läkemedelsförpackningar för att minska risken för förväxlingar Rapport från Läkemedelsverket Juni 2012 Postadress/Postal address: P.O. Box 26, SE-751 03 Uppsala, SWEDEN Besöksadress/Visiting
En ideal op-förstärkare har oändlig inimedans, noll utimpedans och oändlig förstärkning.
 F5 LE1460 Analog elektronik 2005-11-23 kl 08.15 12.00 Alfa En ideal op-förstärkare har oändlig inimedans, noll utimpedans och oändlig förstärkning. ( Impedans är inte samma sak som resistans. Impedans
F5 LE1460 Analog elektronik 2005-11-23 kl 08.15 12.00 Alfa En ideal op-förstärkare har oändlig inimedans, noll utimpedans och oändlig förstärkning. ( Impedans är inte samma sak som resistans. Impedans
Gimp Handbok. Christian Gundersson Xxxx. Xxxx@xxx.xx
 Gimp Handbok Christian Gundersson Xxxx Xxxx@xxx.xx Gimp Handbok av Christian Gundersson Publicerad $Date: 2006/04/12 20:04:19 $ Copyright 2005-2006 Christian Gundersson En liten sammanfattning här Permission
Gimp Handbok Christian Gundersson Xxxx Xxxx@xxx.xx Gimp Handbok av Christian Gundersson Publicerad $Date: 2006/04/12 20:04:19 $ Copyright 2005-2006 Christian Gundersson En liten sammanfattning här Permission
Periodisering i Rebus
 Periodisering i Rebus INTÄKTER När man fakturerar order från resebyrå-modulen kan man välja att få avresedatumet som periodiseringssiffra på intäktskontot, antingen år+månad eller bara år. Inställningen
Periodisering i Rebus INTÄKTER När man fakturerar order från resebyrå-modulen kan man välja att få avresedatumet som periodiseringssiffra på intäktskontot, antingen år+månad eller bara år. Inställningen
Skola: Photoshop och Elements Redigering för äkta bilder
 Skola: Photoshop och Elements Redigering för äkta bilder Med Photoshop kan du lägga på coola effekter, skruva färger och kontraster till oigenkännlighet och skapa fantasibilder, men här lär vi dig i stället
Skola: Photoshop och Elements Redigering för äkta bilder Med Photoshop kan du lägga på coola effekter, skruva färger och kontraster till oigenkännlighet och skapa fantasibilder, men här lär vi dig i stället
Grafisk visualisering av en spårbarhetslösning
 Datavetenskap Opponenter Johan Kärnell och Linnea Hjalmarsson Respondenter Agni Rizk och Tobias Eriksson Grafisk visualisering av en spårbarhetslösning Oppositionsrapport, C-nivå Report 2011:06 1. Generell
Datavetenskap Opponenter Johan Kärnell och Linnea Hjalmarsson Respondenter Agni Rizk och Tobias Eriksson Grafisk visualisering av en spårbarhetslösning Oppositionsrapport, C-nivå Report 2011:06 1. Generell
Hyperspektral avbildning
 Hyperspektral avbildning Statusrapport 2015 DAVID BERGSTRÖM, MIKAEL LUNDBERG, DAVID GUSTAFSSON, THOMAS SVENSSON OCH NICLAS WADSTRÖMER FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet.
Hyperspektral avbildning Statusrapport 2015 DAVID BERGSTRÖM, MIKAEL LUNDBERG, DAVID GUSTAFSSON, THOMAS SVENSSON OCH NICLAS WADSTRÖMER FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet.
Bilaga 4.1 Uppskattning av antalet erforderliga provpunkter och analyser vid detaljundersökningen. Bakgrund. Metod. Konfidensintervallens utveckling
 1 (17) Bilaga 4.1 Uppskattning av antalet erforderliga provpunkter och analyser vid detaljundersökningen Nedanstående material utgick från resultatet av förundersökningen och har legat till grund för dimensioneringen
1 (17) Bilaga 4.1 Uppskattning av antalet erforderliga provpunkter och analyser vid detaljundersökningen Nedanstående material utgick från resultatet av förundersökningen och har legat till grund för dimensioneringen
KTH Tillämpad Fysik. Tentamen i Teknisk Fotografi, SK2380, 2014-06-04, 9-13, FB53
 KTH Tillämpad Fysik Tentamen i Teknisk Fotografi, SK380, 014-06-04, 9-13, FB53 Uppgifterna är lika mycket värda poängmässigt. För godkänt krävs 50 % av max. poängtalet. Hjälpmedel: Formelblad "Radiometriska
KTH Tillämpad Fysik Tentamen i Teknisk Fotografi, SK380, 014-06-04, 9-13, FB53 Uppgifterna är lika mycket värda poängmässigt. För godkänt krävs 50 % av max. poängtalet. Hjälpmedel: Formelblad "Radiometriska
Ljus och färg - Lite teori
 Ljus och färg - Lite teori I samband med musik- och ljud-framträdanden pratar vi om akustik, dvs att ljudet färgas av det material som finns i rummet. En fantastisk flygel kan i en bra konsertlokal låta
Ljus och färg - Lite teori I samband med musik- och ljud-framträdanden pratar vi om akustik, dvs att ljudet färgas av det material som finns i rummet. En fantastisk flygel kan i en bra konsertlokal låta
Objektiv. Skillnad i egenskaper mellan objektiv med olika brännvidder (småbild)
") Håll kameran rätt! För att minimera risken för skakningsoskärpa bör man alltid hålla kameran så stadigt som möjligt. Oftast håller man kameran som i mitten och till höger, med höger hand i kamerans grepp
Håll kameran rätt! För att minimera risken för skakningsoskärpa bör man alltid hålla kameran så stadigt som möjligt. Oftast håller man kameran som i mitten och till höger, med höger hand i kamerans grepp
Förhandling - praktiska tips och råd
 Förhandling - praktiska tips och råd Tänk på att informationen i detta material inte har uppdaterats sedan januari 2014. Aktuella lagar (inklusive beloppsgränser) har förändrats sedan dess och praxis på
Förhandling - praktiska tips och råd Tänk på att informationen i detta material inte har uppdaterats sedan januari 2014. Aktuella lagar (inklusive beloppsgränser) har förändrats sedan dess och praxis på
Diskussionsproblem för Statistik för ingenjörer
 Diskussionsproblem för Statistik för ingenjörer Måns Thulin Rolf Larsson rolf.larsson@math.uu.se Jesper Rydén jesper.ryden@math.uu.se Senast uppdaterad 27 januari 2016 Diskussionsproblem till Lektion 3
Diskussionsproblem för Statistik för ingenjörer Måns Thulin Rolf Larsson rolf.larsson@math.uu.se Jesper Rydén jesper.ryden@math.uu.se Senast uppdaterad 27 januari 2016 Diskussionsproblem till Lektion 3
1. Abstrakt... 2 2. Introduktion... 2 3. Problemspecificering... 2 4. Vår teknik... 3 4.1 Designval... 3 4.2 Abstract Colour Visualization... 5 5.
 1. Abstrakt... 2 2. Introduktion... 2 3. Problemspecificering... 2 4. Vår teknik... 3 4.1 Designval... 3 4.2 Abstract Colour Visualization... 5 5. Realisering av Abstract Color Visualization... 7 6. Diskussion...
1. Abstrakt... 2 2. Introduktion... 2 3. Problemspecificering... 2 4. Vår teknik... 3 4.1 Designval... 3 4.2 Abstract Colour Visualization... 5 5. Realisering av Abstract Color Visualization... 7 6. Diskussion...
Upptäcka och analysera. Qlik Sense 1.1 Copyright 1993-2015 QlikTech International AB. Alla rättigheter förbehållna.
 Upptäcka och analysera Qlik Sense 1.1 Copyright 1993-2015 QlikTech International AB. Alla rättigheter förbehållna. Copyright 1993-2015 QlikTech International AB. Alla rättigheter förbehållna. Qlik, QlikTech,
Upptäcka och analysera Qlik Sense 1.1 Copyright 1993-2015 QlikTech International AB. Alla rättigheter förbehållna. Copyright 1993-2015 QlikTech International AB. Alla rättigheter förbehållna. Qlik, QlikTech,
Metod- PM: Påverkan på Sveriges apotek efter privatiseringen
 Metod- PM: Påverkan på Sveriges apotek efter privatiseringen Problem Sedan privatiseringen av landets apotek skedde för 3 år sedan är det många som hävdar att apoteken inte har utvecklats till det bättre,
Metod- PM: Påverkan på Sveriges apotek efter privatiseringen Problem Sedan privatiseringen av landets apotek skedde för 3 år sedan är det många som hävdar att apoteken inte har utvecklats till det bättre,
Dubbelt En elev plockar upp en näve kuber. En annan ska ta upp dubbelt så många.
 Multilink-kuber Varför kuber i matematikundervisningen? Multilink-kuber eller motsvarande material kan utnyttjas till snart sagt alla områden inom matematikundervisningen, i hela grundskolan och även upp
Multilink-kuber Varför kuber i matematikundervisningen? Multilink-kuber eller motsvarande material kan utnyttjas till snart sagt alla områden inom matematikundervisningen, i hela grundskolan och även upp
Nödrop från Expedition C3: skicka fler tekniker!
 Nödrop från Expedition C3: skicka fler tekniker! Detta har hänt: Expeditionen lättade i maj 2008 efter noggranna förberedelser. Motstånd och faror lurade överallt, men vi litade på vårt trumfkort helautomatisk
Nödrop från Expedition C3: skicka fler tekniker! Detta har hänt: Expeditionen lättade i maj 2008 efter noggranna förberedelser. Motstånd och faror lurade överallt, men vi litade på vårt trumfkort helautomatisk
KTH Tillämpad Fysik. Tentamen i. SK1140, Fotografi för medieteknik. SK2380, Teknisk fotografi 2015-08-18, 8-13, FA32
 KTH Tillämpad Fysik Tentamen i SK1140, Fotografi för medieteknik SK2380, Teknisk fotografi 2015-08-18, 8-13, FA32 Uppgifterna är lika mycket värda poängmässigt. För godkänt krävs 50 % av max. poängtalet.
KTH Tillämpad Fysik Tentamen i SK1140, Fotografi för medieteknik SK2380, Teknisk fotografi 2015-08-18, 8-13, FA32 Uppgifterna är lika mycket värda poängmässigt. För godkänt krävs 50 % av max. poängtalet.
Grunderna i stegkodsprogrammering
 Kapitel 1 Grunderna i stegkodsprogrammering Följande bilaga innehåller grunderna i stegkodsprogrammering i den form som används under kursen. Vi kommer att kort diskutera olika datatyper, villkor, operationer
Kapitel 1 Grunderna i stegkodsprogrammering Följande bilaga innehåller grunderna i stegkodsprogrammering i den form som används under kursen. Vi kommer att kort diskutera olika datatyper, villkor, operationer
Word- sense disambiguation
 KTH Word- sense disambiguation Inlämningsuppgift - DD2418 - sprakt12 Mattias Uskali & Emilia Hillert 1/8/2013 Sammanfattning Denna rapport kommer att undersöka två metoder för word- sense disambiguation,
KTH Word- sense disambiguation Inlämningsuppgift - DD2418 - sprakt12 Mattias Uskali & Emilia Hillert 1/8/2013 Sammanfattning Denna rapport kommer att undersöka två metoder för word- sense disambiguation,
Laboration i Maskinelement
 Laboration i Maskinelement Bilväxellådan Namn: Personnummer: Assistents signatur: Datum: Inledning I den här laborationen ska vi gå lite djupare i ämnet maskinelement och ge oss in på något som förmodligen
Laboration i Maskinelement Bilväxellådan Namn: Personnummer: Assistents signatur: Datum: Inledning I den här laborationen ska vi gå lite djupare i ämnet maskinelement och ge oss in på något som förmodligen
Macromedia Flash MX 2004
 Mittuniversitetet ITM Telefon 0771-97 50 00 Erik Öberg Macromedia Flash MX 2004 Visuell kommunikation Detta exemplar tillhör: VT 2005 Laborationskompendium för Macromedia Flash Uppgift 1 Texthanteringen
Mittuniversitetet ITM Telefon 0771-97 50 00 Erik Öberg Macromedia Flash MX 2004 Visuell kommunikation Detta exemplar tillhör: VT 2005 Laborationskompendium för Macromedia Flash Uppgift 1 Texthanteringen
Ledstråk för personer med synskada
 Ledstråk för personer med synskada Vid byte mellan kollektiva färdmedel En sammanfattning av ett examensarbete med samma namn Håkan Lindström Förord Denna skrift är baserad på Håkan Lindströms examensarbete
Ledstråk för personer med synskada Vid byte mellan kollektiva färdmedel En sammanfattning av ett examensarbete med samma namn Håkan Lindström Förord Denna skrift är baserad på Håkan Lindströms examensarbete
2. Markera område (se instruktioner längt ner på sidan) och markera Fastighetskartan och Laserdata till höger (se bild). Tryck på Ready.
 och markera Fastighetskartan och Laserdata till höger (se bild). Tryck på Ready.") Joakim Svensk, november 2013 Revidering av Fredrik Ahnlén, april 2014 Att generera OL-kartor från Laserdata Sedan 2009 har Lantmäteriet jobbat med att laserscanna hela Sverige för att skapa en bättre höjdmodell.
Joakim Svensk, november 2013 Revidering av Fredrik Ahnlén, april 2014 Att generera OL-kartor från Laserdata Sedan 2009 har Lantmäteriet jobbat med att laserscanna hela Sverige för att skapa en bättre höjdmodell.
9-1 Koordinatsystem och funktioner. Namn:
 9- Koordinatsystem och funktioner. Namn: Inledning I det här kapitlet skall du lära dig vad ett koordinatsystem är och vilka egenskaper det har. I ett koordinatsystem kan man representera matematiska funktioner
9- Koordinatsystem och funktioner. Namn: Inledning I det här kapitlet skall du lära dig vad ett koordinatsystem är och vilka egenskaper det har. I ett koordinatsystem kan man representera matematiska funktioner
e-sense move dali Manual
 e-sense move dali Manual Innehåll Moves grundläggande funktionssätt...4 5 Programmera RF-signalen...6 7 Ta bort RF-signalen...8 Förinställda scenarion...9 Alternativ för mottagande av RF-signaler...10
e-sense move dali Manual Innehåll Moves grundläggande funktionssätt...4 5 Programmera RF-signalen...6 7 Ta bort RF-signalen...8 Förinställda scenarion...9 Alternativ för mottagande av RF-signaler...10
Observationer rörande omvandling av digitala yttäckande vektordata till rasterformat.
 GeoDataEnheten Kulturgeografiska Institutionen 106 91 Stockhlm Observationer rörande omvandling av digitala yttäckande vektordata till rasterformat. 1993 Stefan Ene INNEHÅLL Inledning Omvandling av koordinatsatta
GeoDataEnheten Kulturgeografiska Institutionen 106 91 Stockhlm Observationer rörande omvandling av digitala yttäckande vektordata till rasterformat. 1993 Stefan Ene INNEHÅLL Inledning Omvandling av koordinatsatta
FÄLTMÄTINSTRUKTION TSI VELOCICALC
 1(10) Introduktion VelociCal-mätarna är utrustade med ett antal olika funktioner för mätning av lufthastighet, temperatur, tryck, luftfuktighet, daggpunkt och flöde. Fältmätinstruktionen följer Mätforums
1(10) Introduktion VelociCal-mätarna är utrustade med ett antal olika funktioner för mätning av lufthastighet, temperatur, tryck, luftfuktighet, daggpunkt och flöde. Fältmätinstruktionen följer Mätforums
Praktisk användning av Parasol & LCC-kalkyl
 Praktisk användning av Parasol & LCC-kalkyl Påvisande av ekonomiska & miljömässiga vinster vid solskyddsinvestering (Arbetet är en del i kursen Diplomerad Solskyddstekniker) Christian Westberg & Jim Eriksson
Praktisk användning av Parasol & LCC-kalkyl Påvisande av ekonomiska & miljömässiga vinster vid solskyddsinvestering (Arbetet är en del i kursen Diplomerad Solskyddstekniker) Christian Westberg & Jim Eriksson
Steg 4. Lika arbeten. 10 Diskrimineringslagen
 Steg 4. Lika arbeten 10 Diskrimineringslagen [ ] Arbetsgivaren ska bedöma om förekommande löneskillnader har direkt eller indirekt samband med kön. Bedömningen ska särskilt avse skillnader mellan - Kvinnor
Steg 4. Lika arbeten 10 Diskrimineringslagen [ ] Arbetsgivaren ska bedöma om förekommande löneskillnader har direkt eller indirekt samband med kön. Bedömningen ska särskilt avse skillnader mellan - Kvinnor
Möjliga Världar. Skapande Skola, Halmstad. Robert Hais
 Skapande Skola, Halmstad Skapande skola Här följer ett antal olika fördefinierade projekt att välja mellan men även att få inspiration av vilket kan användas till att sätta ihop ett skrädddasytt program.
Skapande Skola, Halmstad Skapande skola Här följer ett antal olika fördefinierade projekt att välja mellan men även att få inspiration av vilket kan användas till att sätta ihop ett skrädddasytt program.
Älgstammen i Örnsköldsviks ÄFO Vintern 2014/2015
 Älgstammen i Örnsköldsviks ÄFO Vintern 2014/2015 På uppdrag av Holmen Skog har Svensk Naturförvaltning AB u ört en modellberäkning av älgstammens storlek, sammansä ning och utveckling i Örnsköldsviks älgförvaltningsområde
Älgstammen i Örnsköldsviks ÄFO Vintern 2014/2015 På uppdrag av Holmen Skog har Svensk Naturförvaltning AB u ört en modellberäkning av älgstammens storlek, sammansä ning och utveckling i Örnsköldsviks älgförvaltningsområde
REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN
 AV REGLERTEKNIKEN") REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN Automatisk styra processer. Generell metodik Bengt Carlsson Huvudantagande: Processen kan påverkas med en styrsignal (insignal). Normalt behöver man kunna mäta
REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN Automatisk styra processer. Generell metodik Bengt Carlsson Huvudantagande: Processen kan påverkas med en styrsignal (insignal). Normalt behöver man kunna mäta
Kvantfysik - introduktion
 Föreläsning 6 Ljusets dubbelnatur Det som bestämmer vilken färg vi uppfattar att ett visst ljus (från t.ex. s.k. neonskyltar) har är ljusvågornas våglängd. violett grönt orange IR λ < 400 nm λ > 750 nm
Föreläsning 6 Ljusets dubbelnatur Det som bestämmer vilken färg vi uppfattar att ett visst ljus (från t.ex. s.k. neonskyltar) har är ljusvågornas våglängd. violett grönt orange IR λ < 400 nm λ > 750 nm
Slutrapport Fästanordning för fordons specifik bilbarnstol i framsätet
 Rapporten är framtagen med ekonomiskt bidrag från Trafikverkets skyltfond. Ståndpunkter och slutsatser i rapporten reflekterar författaren och överensstämmer inte nödvändighet med Trafikverkets ståndpunkter
Rapporten är framtagen med ekonomiskt bidrag från Trafikverkets skyltfond. Ståndpunkter och slutsatser i rapporten reflekterar författaren och överensstämmer inte nödvändighet med Trafikverkets ståndpunkter
Concept Selection Chaper 7
 Akademin för Innovation, Design och Teknik Concept Selection Chaper 7 KPP306 Produkt och processutveckling Grupp 2 Johannes Carlem Daniel Nordin Tommie Olsson 2012 02 28 Handledare: Rolf Lövgren Inledning
Akademin för Innovation, Design och Teknik Concept Selection Chaper 7 KPP306 Produkt och processutveckling Grupp 2 Johannes Carlem Daniel Nordin Tommie Olsson 2012 02 28 Handledare: Rolf Lövgren Inledning
KARMATIC PROFILER 2000 Manual
 KARMATIC PROFILER 2000 Manual Beskrivning Karmatic 2000.2 Instrument för rundhetsmätning av kommutator och släpringar. Mätnoggrannhet / repeterbarhet : 1,5 m förutom yttre störningar t.ex. vibrationer.
KARMATIC PROFILER 2000 Manual Beskrivning Karmatic 2000.2 Instrument för rundhetsmätning av kommutator och släpringar. Mätnoggrannhet / repeterbarhet : 1,5 m förutom yttre störningar t.ex. vibrationer.
Programmering A C# VT 2010. Ett kompendie över Programmering A (50p) i c# Stefan Fredriksson 2010 02 08
 i c# Stefan Fredriksson 2010 02 08") Programmering A C# VT 2010 Ett kompendie över Programmering A (50p) i c# Stefan Fredriksson 2010 02 08 Innehåll Hjälp och referenser... 3 Kap 1 Introduktion... 3 Steg för steg... 3 Kapitel 2 Variabler...
Programmering A C# VT 2010 Ett kompendie över Programmering A (50p) i c# Stefan Fredriksson 2010 02 08 Innehåll Hjälp och referenser... 3 Kap 1 Introduktion... 3 Steg för steg... 3 Kapitel 2 Variabler...
Bioenergikluster Småland. En rapport inom Energimyndighetens Euforiprojekt:
 Bioenergikluster Småland En rapport inom Energimyndighetens Euforiprojekt: Kommersiella förutsättningar för att implementera gassensorer i biobränsleeldade närvärmeanläggningar David Eskilsson & Claes
Bioenergikluster Småland En rapport inom Energimyndighetens Euforiprojekt: Kommersiella förutsättningar för att implementera gassensorer i biobränsleeldade närvärmeanläggningar David Eskilsson & Claes
SPELSYSTEM INOMHUS 5 Á-SIDE 1-2-1
 SPELSYSTEM INOMHUS 5 Á-SIDE 1-2-1 Spelarlyftet har en spelarutbildningsplan där det bl.a. ingår att en spelare bör känna till och behärska olika spelsystem med tillhörande utgångspositioner, anfalls- och
SPELSYSTEM INOMHUS 5 Á-SIDE 1-2-1 Spelarlyftet har en spelarutbildningsplan där det bl.a. ingår att en spelare bör känna till och behärska olika spelsystem med tillhörande utgångspositioner, anfalls- och
Inspektion Användarmanuel
 Onix AS Version 1.0.5.0 16.12.2014 2014 Inspektion Användarmanuel Denna applikation kan du enkelt kontrollera utrustningar i Utrustningsportalen. 0 S i d a INNEHÅLLSFÖRTECKNING Sida INLEDNING... 3 STARTA
Onix AS Version 1.0.5.0 16.12.2014 2014 Inspektion Användarmanuel Denna applikation kan du enkelt kontrollera utrustningar i Utrustningsportalen. 0 S i d a INNEHÅLLSFÖRTECKNING Sida INLEDNING... 3 STARTA
Rhino3D. Schackbräde. Krav. Några detaljer som kan vara bra att känna till:
 Laboration 2, PVT02 Modellering och Animering i Rhino 2D4138 Visualisering, datorgrafik och avancerad interaktion, (fovgrafik02), våren 2002 görs under andra kursveckan Labben går ut på att ni ska få en
Laboration 2, PVT02 Modellering och Animering i Rhino 2D4138 Visualisering, datorgrafik och avancerad interaktion, (fovgrafik02), våren 2002 görs under andra kursveckan Labben går ut på att ni ska få en
Photoshop CS4. Adobe. Fortsättningskurs
 Photoshop CS4 Adobe Fortsättningskurs Adobe Photoshop CS4 Fortsättningskurs Till denna bok medföljer ett antal övningsfiler på cd-skiva (filerna finns i mappen Photoshop CS4 Forts). Kopiera filerna till
Photoshop CS4 Adobe Fortsättningskurs Adobe Photoshop CS4 Fortsättningskurs Till denna bok medföljer ett antal övningsfiler på cd-skiva (filerna finns i mappen Photoshop CS4 Forts). Kopiera filerna till
Tillämplingar av bildanalys
 Tillämplingar av bildanalys Hanna Källén I denna avhandling bildanalys används för att försöka lösa olika problem. En stor del av avhandlingen handlar om hur vi kan använda bildanalys för att förbättra
Tillämplingar av bildanalys Hanna Källén I denna avhandling bildanalys används för att försöka lösa olika problem. En stor del av avhandlingen handlar om hur vi kan använda bildanalys för att förbättra
Kvalitetsmått: Skärpa
 Kvalitetsmått: Skärpa Metoder att mäta skärpa: Upplösningstest: Hur täta streckmönster syns i bilden? Subjektivt, begränsad information (Lab. 2) MTF: Fullständig information (Lab. 2) Upplösningstest med
Kvalitetsmått: Skärpa Metoder att mäta skärpa: Upplösningstest: Hur täta streckmönster syns i bilden? Subjektivt, begränsad information (Lab. 2) MTF: Fullständig information (Lab. 2) Upplösningstest med
Kontaktsensor för mätning ZX-T-SERIEN
 Advanced Industrial Automation Kontaktsensor för mätning ZX-T-SERIEN digital teknik för maximal tillförlitlighet Omron har nu utökat produktfamiljen av smarta sensorer med ZX-T, en kontaktsensor som är
Advanced Industrial Automation Kontaktsensor för mätning ZX-T-SERIEN digital teknik för maximal tillförlitlighet Omron har nu utökat produktfamiljen av smarta sensorer med ZX-T, en kontaktsensor som är
Innehåll. Föreläsning 11. Organisation av Trie. Trie Ytterligare en variant av träd. Vi har tidigare sett: Informell specifikation
 Innehåll Föreläsning 11 Trie Sökträd Trie och Sökträd 356 357 Trie Ytterligare en variant av träd. Vi har tidigare sett: Oordnat träd där barnen till en nod bildar en mängd Ordnat träd där barnen till
Innehåll Föreläsning 11 Trie Sökträd Trie och Sökträd 356 357 Trie Ytterligare en variant av träd. Vi har tidigare sett: Oordnat träd där barnen till en nod bildar en mängd Ordnat träd där barnen till
SPELSYSTEM EIF P02, 11 vs 11
 SPELSYSTEM EIF P02, 11 vs 11 UTGÅNGSPOSITIONER 4-1:2-3 dvs en fyrbackslinje med alternerande innerbackar, ett mittfält bestående av två mer offensiva spelare och en lite mer defensiv spelare (balansspelare)
SPELSYSTEM EIF P02, 11 vs 11 UTGÅNGSPOSITIONER 4-1:2-3 dvs en fyrbackslinje med alternerande innerbackar, ett mittfält bestående av två mer offensiva spelare och en lite mer defensiv spelare (balansspelare)
Förord. ra och Ackordspel (Reuter&Reuter), men andra böcker kan naturligtvis också användas (se
, men andra böcker kan naturligtvis också användas (se") Förord Lär av Mästarna har vuxit fram under min tid som lärare i ämnet satslära med arrangering vid Musikhögskolan i Malmö. Materialet har under ett decennium provats både i grupp- och individuell undervisning
Förord Lär av Mästarna har vuxit fram under min tid som lärare i ämnet satslära med arrangering vid Musikhögskolan i Malmö. Materialet har under ett decennium provats både i grupp- och individuell undervisning
Objektorienterad programmering
 Objektorienterad programmering Emil Ahlqvist (c10eat@cs.umu.se) Didrik Püschel (dv11dpl@cs.umu.se) Johan Hammarström (c08jhm@cs.umu.se) Hannes Frimmel Moström (c10hml@cs.umu.se) 1 1. Introduktion 1.1 Objektorienterad
Objektorienterad programmering Emil Ahlqvist (c10eat@cs.umu.se) Didrik Püschel (dv11dpl@cs.umu.se) Johan Hammarström (c08jhm@cs.umu.se) Hannes Frimmel Moström (c10hml@cs.umu.se) 1 1. Introduktion 1.1 Objektorienterad
Föreläsning 3.1: Datastrukturer, en översikt
 Föreläsning.: Datastrukturer, en översikt Hittills har vi i kursen lagt mycket fokus på algoritmiskt tänkande. Vi har inte egentligen ägna så mycket uppmärksamhet åt det andra som datorprogram också består,
Föreläsning.: Datastrukturer, en översikt Hittills har vi i kursen lagt mycket fokus på algoritmiskt tänkande. Vi har inte egentligen ägna så mycket uppmärksamhet åt det andra som datorprogram också består,
Analys av trafiken i Oskarshamn vid ankomst Gotlandsfärja
 1 (11) PM Analys av trafiken i Oskarshamn vid ankomst Gotlandsfärja Ansvarig mikrosimulering/trafikanalys: Handläggare mikrosimulering: Författare detta PM: Granskning detta PM: Sebastian Hasselblom Felicia
1 (11) PM Analys av trafiken i Oskarshamn vid ankomst Gotlandsfärja Ansvarig mikrosimulering/trafikanalys: Handläggare mikrosimulering: Författare detta PM: Granskning detta PM: Sebastian Hasselblom Felicia
Kompletterande lösningsförslag och ledningar, Matematik 3000 kurs A, kapitel 6
 Kompletterande lösningsförslag och ledningar, Matematik 000 kurs A, kapitel Kapitel.1 101, 10, 10 Eempel som löses i boken. 104, 105, 10, 107, 108, 109 Se facit 110 a) Ledning: Alla punkter med positiva
Kompletterande lösningsförslag och ledningar, Matematik 000 kurs A, kapitel Kapitel.1 101, 10, 10 Eempel som löses i boken. 104, 105, 10, 107, 108, 109 Se facit 110 a) Ledning: Alla punkter med positiva
Algoritm för uppskattning av den maximala effekten i eldistributionsnät med avseende på Nätnyttomodellens sammanlagringsfunktion
 Algoritm för uppskattning av den maximala effekten i eldistributionsnät med avseende på Nätnyttomodellens sammanlagringsfunktion Carl Johan Wallnerström December 2005 Kungliga Tekniska Högskolan (KTH),
Algoritm för uppskattning av den maximala effekten i eldistributionsnät med avseende på Nätnyttomodellens sammanlagringsfunktion Carl Johan Wallnerström December 2005 Kungliga Tekniska Högskolan (KTH),
PROBLEM OCH LÖSNINGAR RUNT TYNGDLÖSHET
 2003-05-31 PROBLEM OCH LÖSNINGAR RUNT TYNGDLÖSHET av Gabriel Jonsson Figur 1 Möjlig framtida marsraket enligt NASA Uppsats inom kursen Astronomi B, 5p Institutionen för fysik, Umeå Universitet Lärare:
2003-05-31 PROBLEM OCH LÖSNINGAR RUNT TYNGDLÖSHET av Gabriel Jonsson Figur 1 Möjlig framtida marsraket enligt NASA Uppsats inom kursen Astronomi B, 5p Institutionen för fysik, Umeå Universitet Lärare:
Foto och Bild - Lab B
 Biomedicinsk fysik & röntgenfysik Kjell Carlsson Foto och Bild - Lab B Svartvitt kopieringsarbete, tonreproduktion Kurs: 2D1574, Medieteknik grundkurs, moment: Foto och bild Kjell Carlsson & Hans Järling
Biomedicinsk fysik & röntgenfysik Kjell Carlsson Foto och Bild - Lab B Svartvitt kopieringsarbete, tonreproduktion Kurs: 2D1574, Medieteknik grundkurs, moment: Foto och bild Kjell Carlsson & Hans Järling
Ögonigenkänning. Sammanfattning. 1. Inledning
 Ögonigenkänning Linus Flood & Sofi Klockare Email: {linfl683,sofkl438}@student.liu.se Handledare: Viiveke Fåk, {viiveke@isy.liu.se} Projektrapport för Informationssäkerhet Linköpings universitet, Sverige
Ögonigenkänning Linus Flood & Sofi Klockare Email: {linfl683,sofkl438}@student.liu.se Handledare: Viiveke Fåk, {viiveke@isy.liu.se} Projektrapport för Informationssäkerhet Linköpings universitet, Sverige
Förenklat navigeringsstöd
 Förenklat navigeringsstöd En metodstudie Ulf Hörberg, Jan Gustavsson och Stig Sandberg FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet. Kärnverksamheten är forskning,
Förenklat navigeringsstöd En metodstudie Ulf Hörberg, Jan Gustavsson och Stig Sandberg FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet. Kärnverksamheten är forskning,
I princip gäller det att mäta ström-spänningssambandet, vilket tillsammans med kännedom om provets geometriska dimensioner ger sambandet.
 Avsikten med laborationen är att studera de elektriska ledningsmekanismerna hos i första hand halvledarmaterial. Från mätningar av konduktivitetens temperaturberoende samt Hall-effekten kan en hel del
Avsikten med laborationen är att studera de elektriska ledningsmekanismerna hos i första hand halvledarmaterial. Från mätningar av konduktivitetens temperaturberoende samt Hall-effekten kan en hel del
Figur 1. Skärmbild med markerade steg i videon. Diagram och tabell som visar positionerna som funktion av tiden.
 Videomodellering I tillägg till videoanalys är det möjligt att skapa modeller i Tracker. Genom att använda en video av ett försök kan man utifrån denna skapa en modell som beskriver förloppet. Det finns
Videomodellering I tillägg till videoanalys är det möjligt att skapa modeller i Tracker. Genom att använda en video av ett försök kan man utifrån denna skapa en modell som beskriver förloppet. Det finns
 Ljusmätning 1 "Mäta i handen i skugga". Med handhållen ljusmätare för befintligt ljus så finns en metod som är mycket enkel, snabb och fungerar till de flesta genomsnittliga motiv: att "mäta i handen i
Ljusmätning 1 "Mäta i handen i skugga". Med handhållen ljusmätare för befintligt ljus så finns en metod som är mycket enkel, snabb och fungerar till de flesta genomsnittliga motiv: att "mäta i handen i
Tentaupplägg denna gång
 Några tips på vägen kanske kan vara bra. Tentaupplägg denna gång TIPS 1: Läs igenom ALLA uppgifterna och välj den du känner att det är den lättaste först. Det kan gärna ta 10-20 minuter. Försök skriva
Några tips på vägen kanske kan vara bra. Tentaupplägg denna gång TIPS 1: Läs igenom ALLA uppgifterna och välj den du känner att det är den lättaste först. Det kan gärna ta 10-20 minuter. Försök skriva
Färglära. Olika sätt att sortera färger. Vilket system är det rätta? Peter Stenlund, Solviks folkhögskola
 Färglära Olika sätt att sortera färger Titta dig omkring. Försök att urskilja några färger runt omkring dig. Vilken färg har stolen du sitter på? Vilken färg har golvet eller befinner du dig utomhus? Färgerna
Färglära Olika sätt att sortera färger Titta dig omkring. Försök att urskilja några färger runt omkring dig. Vilken färg har stolen du sitter på? Vilken färg har golvet eller befinner du dig utomhus? Färgerna
Taktikanalys i tennis
 Taktikanalys i tennis - en del av grusspelets karaktär Micaela Hjelm Gymnastik- och idrottshögskolan Tränarprogrammet åk 2 Kurs: Träningslära 2, 7,5 hp HT-2008 Handledare: Mårten Fredriksson Innehållsförteckning
Taktikanalys i tennis - en del av grusspelets karaktär Micaela Hjelm Gymnastik- och idrottshögskolan Tränarprogrammet åk 2 Kurs: Träningslära 2, 7,5 hp HT-2008 Handledare: Mårten Fredriksson Innehållsförteckning
Inledning till Wavesurfer av Christine Ericsdotter (Lingvistik, Stockholms universitet)
") Inledning till Wavesurfer av Christine Ericsdotter (Lingvistik, Stockholms universitet) WaveSurfer är ett program för analys av tal utvecklat vid Centrum för talteknologi, Institutionen för tal, musik
Inledning till Wavesurfer av Christine Ericsdotter (Lingvistik, Stockholms universitet) WaveSurfer är ett program för analys av tal utvecklat vid Centrum för talteknologi, Institutionen för tal, musik
LJ-Teknik Bildskärpa
 Bildskärpa - Skärpedjup och fokus - Egen kontroll och fokusjustering - Extern kalibrering Bildskärpa, skärpedjup och fokus Brännpunkt och fokus Medan brännpunkt är en entydig term inom optiken, kan fokus
Bildskärpa - Skärpedjup och fokus - Egen kontroll och fokusjustering - Extern kalibrering Bildskärpa, skärpedjup och fokus Brännpunkt och fokus Medan brännpunkt är en entydig term inom optiken, kan fokus
Inlämningsuppgift 4 NUM131
 Inlämningsuppgift 4 NUM131 Modell Denna inlämningsuppgift går ut på att simulera ett modellflygplans rörelse i luften. Vi bortser ifrån rörelser i sidled och studerar enbart rörelsen i ett plan. De krafter
Inlämningsuppgift 4 NUM131 Modell Denna inlämningsuppgift går ut på att simulera ett modellflygplans rörelse i luften. Vi bortser ifrån rörelser i sidled och studerar enbart rörelsen i ett plan. De krafter
Page: 1 of 14 Title: TouchCenter 2 & 4 Revision: 1 Type: User Manual Author: MK. Användarmanual. TouchCenter 2 & 4
 Page: 1 of 14 Användarmanual TouchCenter 2 & 4 Styrsystem för alla typer av solskydd Page: 2 of 14 Innehållsförteckning 1 Detta är TouchCenter... 3 2 Elektrisk anslutning och Elektrisk data... 3 3 Viktig
Page: 1 of 14 Användarmanual TouchCenter 2 & 4 Styrsystem för alla typer av solskydd Page: 2 of 14 Innehållsförteckning 1 Detta är TouchCenter... 3 2 Elektrisk anslutning och Elektrisk data... 3 3 Viktig
Egenskaper och inställningar för QuickScan och förhandsgranskningsfönstret
 [LISTAN TILL HÖGER. Hela vägen uppifrån och ned] Använda knappen QuickScan (snabbavläsning) Inställningar för QuickScan Inställningar för egenskaper Förhandsgranskningsfönster (Preview window) [SLUT LISTA]
[LISTAN TILL HÖGER. Hela vägen uppifrån och ned] Använda knappen QuickScan (snabbavläsning) Inställningar för QuickScan Inställningar för egenskaper Förhandsgranskningsfönster (Preview window) [SLUT LISTA]
Lathund för att arbeta med pdf
 Lathund för att arbeta med pdf Till Riksstämman 2016 är alla handlingar digitala, närmare bestämt i PDF-format. I den här lathunden får du som använder en PC/Mac tips och råd om hur du lättast går tillväga
Lathund för att arbeta med pdf Till Riksstämman 2016 är alla handlingar digitala, närmare bestämt i PDF-format. I den här lathunden får du som använder en PC/Mac tips och råd om hur du lättast går tillväga
Införande av ruttplanering och slottider: ett medel att påverka kötider och uppstallning vid slakterier.
 Införande av ruttplanering och slottider: ett medel att påverka kötider och uppstallning vid slakterier. Sellman S a*., Flisberg P a., Henningsson M a., Jonsson A b., Rönnqvist M c., Wennergren U a. a
Införande av ruttplanering och slottider: ett medel att påverka kötider och uppstallning vid slakterier. Sellman S a*., Flisberg P a., Henningsson M a., Jonsson A b., Rönnqvist M c., Wennergren U a. a
1. Månens rörelser. Övning 1: Illustrera astronomiska fenomen
 Övning 1: Illustrera astronomiska fenomen Uppgiften var att skapa illustrationer till fyra texter. Illustationerna tydliggör allt det som texten beskriver. 1. Månens rörelser Månen roterar runt jorden
Övning 1: Illustrera astronomiska fenomen Uppgiften var att skapa illustrationer till fyra texter. Illustationerna tydliggör allt det som texten beskriver. 1. Månens rörelser Månen roterar runt jorden
SPELSYSTEM 11-manna 4-3-3
 SPELSYSTEM 11-manna 4-3-3 Spelarlyftet har en spelarutbildningsplan där det bl.a. ingår att en spelare bör känna till och behärska olika spelsystem med tillhörande utgångspositioner, anfalls- och försvarsmetoder
SPELSYSTEM 11-manna 4-3-3 Spelarlyftet har en spelarutbildningsplan där det bl.a. ingår att en spelare bör känna till och behärska olika spelsystem med tillhörande utgångspositioner, anfalls- och försvarsmetoder
Läs detta innan du fortsätter, eller skriv ut det, klicka runt lite och läs samtidigt.
 Bruksanvisning Installera CubeBiz... 2 Välj språk... 2 När du vill köra testversionen i 15 dagar... 3 När du köper en CubeBiz-licens... 3 Registrera en giltig licensnyckel... 3 Starta ett nytt projekt...
Bruksanvisning Installera CubeBiz... 2 Välj språk... 2 När du vill köra testversionen i 15 dagar... 3 När du köper en CubeBiz-licens... 3 Registrera en giltig licensnyckel... 3 Starta ett nytt projekt...
Försättsblad till skriftlig tentamen vid Linköpings Universitet
 Försättsblad till skriftlig tentamen vid Linköpings Universitet (fylls i av ansvarig) Datum för tentamen Sal Tid Kurskod Provkod Kursnamn/benämning Institution Antal uppgifter i tentamen Antal sidor på
Försättsblad till skriftlig tentamen vid Linköpings Universitet (fylls i av ansvarig) Datum för tentamen Sal Tid Kurskod Provkod Kursnamn/benämning Institution Antal uppgifter i tentamen Antal sidor på
TENTAMEN: Design och konstruktion av grafiska gränssnitt DAT215
 TENTAMEN: Design och konstruktion av grafiska gränssnitt DAT215 DAG: 14 mars, 2011 TID: 8.30 12.30 SAL: Hörsalsvägen Ansvarig: Olof Torgersson, tel. 772 54 06. Institutionen för tillämpad informationsteknologi.
TENTAMEN: Design och konstruktion av grafiska gränssnitt DAT215 DAG: 14 mars, 2011 TID: 8.30 12.30 SAL: Hörsalsvägen Ansvarig: Olof Torgersson, tel. 772 54 06. Institutionen för tillämpad informationsteknologi.
Unikt Plug-and-Play-koncept ZX LASERSENSOR
 Advanced Industrial Automation Unikt Plug-and-Play-koncept ZX LASERSENSOR för exakt mätning Lasersensorserien ZX från Omron, världens ledande tillverkare av sensorer, sätter nya standarder för exakt mätavkänning.
Advanced Industrial Automation Unikt Plug-and-Play-koncept ZX LASERSENSOR för exakt mätning Lasersensorserien ZX från Omron, världens ledande tillverkare av sensorer, sätter nya standarder för exakt mätavkänning.
Varför är jag domare. Roller och förväntningar
 Domarskap Steg1 1 2 Varför är jag domare Två domare reagerar inte lika i en likartad situation under matchen. Två människor är inte lika. Alltså finns det inget facit till hur vi bör förbereda oss inför
Domarskap Steg1 1 2 Varför är jag domare Två domare reagerar inte lika i en likartad situation under matchen. Två människor är inte lika. Alltså finns det inget facit till hur vi bör förbereda oss inför
Gör-det-själv-uppgifter 1: marknader och elasticiteter
 LINKÖPINGS UNIVERSITET Institutionen för ekonomisk och industriell utveckling Nationalekonomi Gör-det-själv-uppgifter 1: marknader och elasticiteter Uppgift 1-4 behandlar efterfråge- och utbudskurvor samt
LINKÖPINGS UNIVERSITET Institutionen för ekonomisk och industriell utveckling Nationalekonomi Gör-det-själv-uppgifter 1: marknader och elasticiteter Uppgift 1-4 behandlar efterfråge- och utbudskurvor samt
Mittuniversitetet Institutionen informationsteknologi och medier
 Mittuniversitetet Institutionen informationsteknologi och medier RAPPORT 08-05-16 Civilingenjörsprogrammet, teknisk design, 180 p Kommunikation i tal och skrift, 4 p Examinator: Kenneth Berg Platta tv-skärmar
Mittuniversitetet Institutionen informationsteknologi och medier RAPPORT 08-05-16 Civilingenjörsprogrammet, teknisk design, 180 p Kommunikation i tal och skrift, 4 p Examinator: Kenneth Berg Platta tv-skärmar