EL1000/1120/1110 Reglerteknik AK
|
|
|
- Solveig Ström
- för 6 år sedan
- Visningar:
Transkript

1 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 12: Sammanfattning
2 Kursinfo: Resterande räknestugor , Q , L , Q , Q , L , L , E33 Bra tillfällen att få svar på frågor om Lab2, Lab3 och tentan!
3 Dagens program Kursinfo om lab3 och tentan Kort sammanfattning av kursen Andra reglerteknikkurser Frågor: Pilot-Induced Oscillations Övriga frågor Ev. några tentatal
4 Lab3 Redovisas på 15 min (inom bokat pass på 60 minuter) Var väl förberedd, testa alla program på XQ-dator innan redovisning Om du har problem med lab3robot, så kom ändå till redovisningen
5 Tentan Lördag 17/1, kl Kursbok och räknetabeller (t.ex. beta) OK, men ej övningar, extentor, slides, etc. 5 uppgifter, 10 poäng per uppgift Läs igenom samtliga uppgifter innan du börjar räkna! Motivera varje steg i lösningen! Resultat rapporteras genom Mina sidor
6 Kursutvärdering Var snäll och fyll i kursenkät efter tentamen. Skickas ut via epost.

7 Reglerteknik Reglerteknik: Att ändra systemegenskaper genom återkoppling!
8 Typiskt reglerteknikprojekt 1. Problem: Förbättra systemegenskaper genom aktiv styrning, d.v.s. återkopplad reglering Syften: Stabilitet, robusthet Referensvärdesföljning Reducera störningskänslighet
9 Val av signaler 2. Signaler: Vilka variabler ska vi Styra utsignal y (z om hänsyn tas till mätbrus) Styra med styrsignal u Motverka störning d Mäta y (ev. även mellansignaler)
10 Modellering 3. Modellering: Ta fram en matematisk beskrivning av systemets dynamiska beteende, d.v.s. samband mellan styrsignal, störningar och utsignal: Fysikaliska samband: T.ex. Newtons lagar, Bernoullis lag, etc. Eventuellt följt av linjärisering Experiment: Samla in data och anpassa modell (systemidentifiering). T.ex. stegsvarsexperiment eller frekvenssvarsexperiment
11 Systembeskrivningar Beskrivning från linjära differentialekvationer: Laplacetransform ger överföringsfunktion G(s) s = iω ger frekvenssvar G(iω) Omskrivning som system av första ordningens differentialekvationer ger tillståndsform
12 Specifikationer 4. Specifikationer: Vilka prestanda krävs av slutna systemet? Stegsvar: Stigtid, översläng, insvängningstid, statiskt fel Frekvenssvar: Bandbredd, resonanstopp, statiskt fel, robusthet Tillståndsform: Polers läge, statiskt fel
13 Design och analys 5. Regulatordesign: Bestäm F(s) och säkerställ att alla specifikationer är uppfyllda Design: PID Kompensering Tillståndsåterkoppling (+observatör) Analys: Poler, rotort, slutvärdessatsen Nyquistdiagram, Bodediagram, stabilitetsmarginaler Känslighet och robusthetskriteriet Simulering Om specifikationer ej uppfyllda, gå tillbaka till steg 4, och ev. steg 3, 2 och 1
14 Implementering 6. Implementering: Realisera F s, oftast i dator Val av samplingsintervall Antialiasingfilter Diskretisering av styrlag
15 Läsa mer reglerteknik? EL2520 Reglerteknik, fortsättningskurs, period 4 Multlivariabla system, optimal reglering, robusthet EL2620 Olinjär reglering, period 2 Olinjäriteter i reglering EL2450 Hybrida och inbyggda reglersystem, period 3 Implementering och styrning över nätverk EL1820 Modellering av dynamiska system, period 1 Modelleringsprinciper och systemidentifiering EL2745 Principer för trådlösa sensornätverk, period 1 Distribuerade algoritmer och protokoll EL2421 Reglerteknik, Projektkurs, period 2 Genomför ett helt reglerteknikprojekt Examensarbete

16 Fråga: Pilot-Induced Oscillations (PIO) Går detta att förstå efter att ha läst Reglerteknik AK?
 Instabilt system och")
17 Fråga: Pilot-Induced Oscillations (PIO) (Fart: Mach 0.6, höjd: 1000 m) Instabilt system och icke-minfassystem!
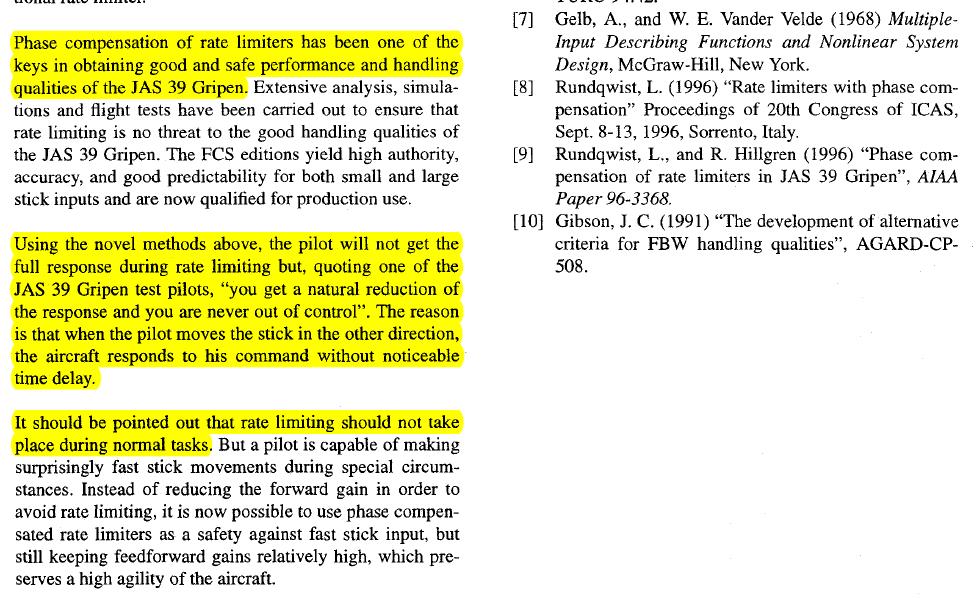
18 Fråga: Pilot-Induced Oscillations (PIO) Attitydvinkelreferens Regulator Roderservon Flygdynamik Attitydvinkel Under vissa förutsättningar hinner inte roderservona att följa de kommandon som ges från regulatorn, d.v.s. u u är Roderservon har rate limits (en typ av olinjäritet). Om regulatorn inte tar hänsyn till dessa på ett bra sätt kan extra fasförlust i reglerloopen skapas när attitydvinkelreferensen ändras snabbt
19
20 Tidsfördröjning fasförlust Minskad fasmarginal
21
22 Övriga frågor?
23 Kompensering
24 Kompensering
25 Hur forma F iω G(iω)?
26 Hur forma F iω G(iω)?
27 Hur forma F iω G(iω)?
28 Hur forma F iω G(iω)?
29 Lead-länk (PD-länk)
30 Maximalt faslyft beror på β
31 Lag-länk
32 Lag-länk och statiskt fel
EL1010 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1010 Reglerteknik AK Föreläsning 6: Kompensering (forts.), robusthet och känslighet Kursinfo Repetition av komplexa tal: https://www.kth.se/social/upload/4fce1a4df276543a98000012/
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1010 Reglerteknik AK Föreläsning 6: Kompensering (forts.), robusthet och känslighet Kursinfo Repetition av komplexa tal: https://www.kth.se/social/upload/4fce1a4df276543a98000012/
EL1000/1120 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 6: Kompensering (forts.), robusthet och känslighet Kursinfo: Lab2 Lab2 betydligt mer krävande än Lab1. Noggranna förberedelser
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 6: Kompensering (forts.), robusthet och känslighet Kursinfo: Lab2 Lab2 betydligt mer krävande än Lab1. Noggranna förberedelser
EL1000/1120 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Tentamen Ordinarie tentamenstillfälle är fredagen den 15/1 kl.14.00-19.00 Obligatorisk föranmälan
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Tentamen Ordinarie tentamenstillfälle är fredagen den 15/1 kl.14.00-19.00 Obligatorisk föranmälan
Fredrik Lindsten Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
") Innehåll föreläsning 12 2 Reglerteknik, föreläsning 12 Sammanfattning av kursen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Innehåll föreläsning 12 2 Reglerteknik, föreläsning 12 Sammanfattning av kursen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
EL1000/1120/1110 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 6: Kompensering (forts.), robusthet och känslighet Kursinfo: Extra material Introduktion till Laplacetransformen: https://www.kth.se/social/upload/527ac1d0f276540a852d0
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 6: Kompensering (forts.), robusthet och känslighet Kursinfo: Extra material Introduktion till Laplacetransformen: https://www.kth.se/social/upload/527ac1d0f276540a852d0
EL1000/1120/1110 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Administration För frågor kring Bilda, labbanmälan, kurshemsida, etc.: kontakta Anneli Ström
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Administration För frågor kring Bilda, labbanmälan, kurshemsida, etc.: kontakta Anneli Ström
Välkomna till TSRT19 Reglerteknik Föreläsning 8. Sammanfattning av föreläsning 7 Framkoppling Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
EL1010 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1010 Reglerteknik AK Föreläsning 10: Regulatorstrukturer Kursinfo: Tentamen EL1010 Ordinarie tentamenstillfälle EL1010 är måndagen den 16/1 kl. 8.00-13.00 Obligatorisk
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1010 Reglerteknik AK Föreläsning 10: Regulatorstrukturer Kursinfo: Tentamen EL1010 Ordinarie tentamenstillfälle EL1010 är måndagen den 16/1 kl. 8.00-13.00 Obligatorisk
Figure 1: Blockdiagram. V (s) + G C (s)y ref (s) 1 + G O (s)
 + G C (s)y ref (s) 1 + G O (s)") Övning 9 Introduktion Varmt välkomna till nionde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Känslighetsfunktionen y ref + e u F (s) G(s) v + + y Figure : Blockdiagram Känslighetsfunktionen
Övning 9 Introduktion Varmt välkomna till nionde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Känslighetsfunktionen y ref + e u F (s) G(s) v + + y Figure : Blockdiagram Känslighetsfunktionen
Välkomna till TSRT19 Reglerteknik Föreläsning 7
 Välkomna till TSRT19 Reglerteknik Föreläsning 7 Sammanfattning av föreläsning 6 Kretsformning Lead-lag design Labförberedande exempel Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet)
Välkomna till TSRT19 Reglerteknik Föreläsning 7 Sammanfattning av föreläsning 6 Kretsformning Lead-lag design Labförberedande exempel Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet)
Välkomna till TSRT15 Reglerteknik Föreläsning 12
 Välkomna till TSRT15 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Återkoppling av skattade tillstånd Integralverkan Återblick på kursen Sammanfattning föreläsning 11 2 Tillstånden innehåller
Välkomna till TSRT15 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Återkoppling av skattade tillstånd Integralverkan Återblick på kursen Sammanfattning föreläsning 11 2 Tillstånden innehåller
Reglerteknik AK, Period 2, 2013 Föreläsning 6. Jonas Mårtensson, kursansvarig
 Reglerteknik AK, Period 2, 213 Föreläsning 6 Jonas Mårtensson, kursansvarig Senaste två föreläsningarna Frekvensbeskrivning, Bodediagram Stabilitetsmarginaler Specifikationer (tids-/frekvensplan, slutna/öppna
Reglerteknik AK, Period 2, 213 Föreläsning 6 Jonas Mårtensson, kursansvarig Senaste två föreläsningarna Frekvensbeskrivning, Bodediagram Stabilitetsmarginaler Specifikationer (tids-/frekvensplan, slutna/öppna
EL1000/1120 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 10: Regulatorstrukturer Tips inför Lab2 och Lab3 Förstärkning anges ofta i decibel (db) i Matlab: Flera av övningarna är till stor
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 10: Regulatorstrukturer Tips inför Lab2 och Lab3 Förstärkning anges ofta i decibel (db) i Matlab: Flera av övningarna är till stor
Reglerteknik AK, Period 2, 2013 Föreläsning 12. Jonas Mårtensson, kursansvarig
 Reglerteknik AK, Period 2, 213 Föreläsning 12 Jonas Mårtensson, kursansvarig Sammanfattning Systembeskrivning Reglerproblemet Modellering Specifikationer Analysverktyg Reglerstrukturer Syntesmetoder Implementering
Reglerteknik AK, Period 2, 213 Föreläsning 12 Jonas Mårtensson, kursansvarig Sammanfattning Systembeskrivning Reglerproblemet Modellering Specifikationer Analysverktyg Reglerstrukturer Syntesmetoder Implementering
Välkomna till TSRT19 Reglerteknik Föreläsning 6. Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 6 Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden! Sammanfattning av förra föreläsningen 2 G(s) Sinus in (i stabilt system) ger sinus
Välkomna till TSRT19 Reglerteknik Föreläsning 6 Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden! Sammanfattning av förra föreläsningen 2 G(s) Sinus in (i stabilt system) ger sinus
Reglerteknik AK. Tentamen 24 oktober 2016 kl 8-13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Välkomna till TSRT19 Reglerteknik M Föreläsning 8
 Välkomna till TSRT19 Reglerteknik M Föreläsning 8 Sammanfattning av föreläsning 7 Kretsformning Lead-lag design Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet) Sammanfattning av förra
Välkomna till TSRT19 Reglerteknik M Föreläsning 8 Sammanfattning av föreläsning 7 Kretsformning Lead-lag design Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet) Sammanfattning av förra
Välkomna till TSRT19 Reglerteknik Föreläsning 12
 Välkomna till TSRT19 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Integralverkan Återkoppling av skattade tillstånd Återblick på kursen LABFLYTT! 2 PGA felbokning datorsal så måste ett
Välkomna till TSRT19 Reglerteknik Föreläsning 12 Sammanfattning av föreläsning 11 Integralverkan Återkoppling av skattade tillstånd Återblick på kursen LABFLYTT! 2 PGA felbokning datorsal så måste ett
TSRT91 Reglerteknik: Föreläsning 9
 TSRT91 Reglerteknik: Föreläsning 9 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 20 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT91 Reglerteknik: Föreläsning 9 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 20 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen , kl
 REGLERTEKNIK KTH REGLERTEKNIK AK EL/EL/EL2 Tentamen 2 2 4, kl. 4. 9. Hjälpmedel: Kursboken i glerteknik AK (Glad, Ljung: glerteknik eller motsvarande) räknetabeller, formelsamlingar och räknedosa. Observeraattövningsmaterial
REGLERTEKNIK KTH REGLERTEKNIK AK EL/EL/EL2 Tentamen 2 2 4, kl. 4. 9. Hjälpmedel: Kursboken i glerteknik AK (Glad, Ljung: glerteknik eller motsvarande) räknetabeller, formelsamlingar och räknedosa. Observeraattövningsmaterial
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-- Sal () T,T2,KÅRA (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-- Sal () T,T2,KÅRA (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
Välkomna till TSRT19 Reglerteknik Föreläsning 3. Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula
 Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
REGLERTEKNIK, KTH. REGLERTEKNIK AK EL1000, EL1110 och EL1120
 REGLERTEKNIK, KTH REGLERTEKNIK AK EL1000, EL1110 och EL1120 Tentamen 20111017, kl 14:00 19:00 Hjälpmedel: Observandum: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande), räknetabeller,
REGLERTEKNIK, KTH REGLERTEKNIK AK EL1000, EL1110 och EL1120 Tentamen 20111017, kl 14:00 19:00 Hjälpmedel: Observandum: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande), räknetabeller,
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen , kl
 REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2009 12 15, kl. 14.00 19.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2009 12 15, kl. 14.00 19.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
Reglerteknik Z / Bt/I/Kf/F
 Reglerteknik Z / Bt/I/Kf/F Kurskod: SSY 050, ERE 080, ERE 091 Tentamen 2007-05-29 Tid: 8:30-12:30, Lokal: M-huset Lärare: Knut Åkesson tel 3717, 0701-74 95 25 Tentamen omfattar 25 poäng, där betyg tre
Reglerteknik Z / Bt/I/Kf/F Kurskod: SSY 050, ERE 080, ERE 091 Tentamen 2007-05-29 Tid: 8:30-12:30, Lokal: M-huset Lärare: Knut Åkesson tel 3717, 0701-74 95 25 Tentamen omfattar 25 poäng, där betyg tre
Lead-lag-reglering. Fundera på till den här föreläsningen. Fasavancerande (lead-) länk. Ex. P-regulator. Vi vill ha en regulator som uppfyller:
 länk. Ex. P-regulator. Vi vill ha en regulator som uppfyller:") TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby Sammanfattning av föreläsning 6 Regulatorsyntes
TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby Sammanfattning av föreläsning 6 Regulatorsyntes
Lösningsförslag till tentamen i Reglerteknik Y/D (TSRT12)
") Lösningsförslag till tentamen i Reglerteknik Y/D (TSRT) 0-03-8. (a) Nolställen: - (roten till (s + ) 0 ) Poler: -, -3 (rötterna till (s + )(s + 3) 0) Eftersom alla poler har strikt negativ realdel är systemet
Lösningsförslag till tentamen i Reglerteknik Y/D (TSRT) 0-03-8. (a) Nolställen: - (roten till (s + ) 0 ) Poler: -, -3 (rötterna till (s + )(s + 3) 0) Eftersom alla poler har strikt negativ realdel är systemet
TSIU61: Reglerteknik. Lead-lag-regulatorn. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 ˆ Sammanfattning av
TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 ˆ Sammanfattning av
1RT490 Reglerteknik I 5hp Tentamen: Del B
 RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Tisdag 23 oktober 208, kl. 4.00-7.00 Plats: Polacksbackens skrivsal Ansvarig lärare: Hans Rosth, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl
RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Tisdag 23 oktober 208, kl. 4.00-7.00 Plats: Polacksbackens skrivsal Ansvarig lärare: Hans Rosth, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl
Reglerteknik AK, FRT010
 Institutionen för REGLERTEKNIK Reglerteknik AK, FRT Tentamen januari 27 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK, FRT Tentamen januari 27 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Välkomna till TSRT19 Reglerteknik M Föreläsning 9
 Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning föreläsning 8 2 F(s) Lead-lag design:
Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning föreläsning 8 2 F(s) Lead-lag design:
TSRT91 Reglerteknik: Föreläsning 2
 Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT91 Reglerteknik: Föreläsning 5
 TSRT9 Reglerteknik: Föreläsning 5 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar / 23 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT9 Reglerteknik: Föreläsning 5 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar / 23 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen , kl
 REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2013 05 31, kl. 8.00 13.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2013 05 31, kl. 8.00 13.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
Välkomna till TSRT19 Reglerteknik M Föreläsning 7. Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet
 Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
TSIU61: Reglerteknik. Sammanfattning från föreläsning 3 (2/4) ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.
 ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.") TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik. Sammanfattning av kursen. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 12 Sammanfattning av kursen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 12 Gustaf Hendeby HT1 2017 1 / 56 Innehåll föreläsning 12: 1. Reglerproblemet 2. Modellbygge
TSIU61: Reglerteknik Föreläsning 12 Sammanfattning av kursen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 12 Gustaf Hendeby HT1 2017 1 / 56 Innehåll föreläsning 12: 1. Reglerproblemet 2. Modellbygge
TSIU61: Reglerteknik. PID-reglering Specifikationer. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2015-06-08 Sal (1) TER 2, TER 3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2015-06-08 Sal (1) TER 2, TER 3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
TENTAMEN I REGLERTEKNIK
 TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
Kretsformning och känslighet
 Innehåll föreläsning 7 2 Reglerteknik, föreläsning 7 Kretsformning och känslighet Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Innehåll föreläsning 7 2 Reglerteknik, föreläsning 7 Kretsformning och känslighet Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Frekvenssvaret är utsignalen då insginalen är en sinusvåg med frekvens ω och amplitud A,
 Övning 8 Introduktion Varmt välkomna till åttonde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Frekvenssvar Frekvenssvaret är utsignalen då insginalen är en sinusvåg med frekvens
Övning 8 Introduktion Varmt välkomna till åttonde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Frekvenssvar Frekvenssvaret är utsignalen då insginalen är en sinusvåg med frekvens
Reglerteknik AK Tentamen
 Reglerteknik AK Tentamen 20-0-7 Lösningsförslag Uppgift a Svar: G(s) = Uppgift b G c (s) = G(s) = C(sI A) B + D = s. (s+)(s+2) Slutna systemets pol blir s (s + )(s + 2). G o(s) + G o (s) = F (s)g(s) +
Reglerteknik AK Tentamen 20-0-7 Lösningsförslag Uppgift a Svar: G(s) = Uppgift b G c (s) = G(s) = C(sI A) B + D = s. (s+)(s+2) Slutna systemets pol blir s (s + )(s + 2). G o(s) + G o (s) = F (s)g(s) +
Välkomna till TSRT19 Reglerteknik M Föreläsning 9
 Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning av förra föreläsningen H(s) W(s) 2 R(s)
Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning av förra föreläsningen H(s) W(s) 2 R(s)
AUTOMATIC CONTROL REGLERTEKNIK LINKÖPINGS UNIVERSITET. M. Enqvist TTIT62: Föreläsning 2. Här är
 Martin Enqvist Återkoppling, PID-reglering, specifikationer Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(21) Exempel: Farthållare i en bil 4(21) Välj
Martin Enqvist Återkoppling, PID-reglering, specifikationer Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(21) Exempel: Farthållare i en bil 4(21) Välj
1RT490 Reglerteknik I 5hp Tentamen: Del B
 RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Torsdag 5 december 206, kl. 3.00-6.00 Plats: Fyrislundsgatan 80, sal Ansvarig lärare: Fredrik Olsson, tel. 08-47 7840. Fredrik kommer och svarar på frågor
RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Torsdag 5 december 206, kl. 3.00-6.00 Plats: Fyrislundsgatan 80, sal Ansvarig lärare: Fredrik Olsson, tel. 08-47 7840. Fredrik kommer och svarar på frågor
Reglerteknik I: F1. Introduktion. Dave Zachariah. Inst. Informationsteknologi, Avd. Systemteknik
 Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars
Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars
TENTAMEN I REGLERTEKNIK Y TSRT12 för Y3 och D3. Lycka till!
 TENTAMEN I REGLERTEKNIK Y TSRT2 för Y3 och D3 TID: 7 mars 25, klockan 4-9. ANSVARIGA LÄRARE: Mikael Norrlöf, tel 28 27 4, Anna Hagenblad, tel 28 44 74 TILLÅTNA HJÄLPMEDEL: Läroboken Glad-Ljung: Reglerteknik,
TENTAMEN I REGLERTEKNIK Y TSRT2 för Y3 och D3 TID: 7 mars 25, klockan 4-9. ANSVARIGA LÄRARE: Mikael Norrlöf, tel 28 27 4, Anna Hagenblad, tel 28 44 74 TILLÅTNA HJÄLPMEDEL: Läroboken Glad-Ljung: Reglerteknik,
Föreläsning 2. Reglerteknik AK. c Bo Wahlberg. 3 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
EL1000/1120/1110 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
Reglerteknik AK. Tentamen 27 oktober 2015 kl 8-13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 27 oktober 205 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 27 oktober 205 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
A. Stationära felet blir 0. B. Stationära felet blir 10 %. C. Man kan inte avgöra vad stationära felet blir enbart med hjälp av polerna.
 Man använder en observatör för att skatta tillståndsvariablerna i ett system, och återkopplar sedan från det skattade tillståndet. Hur påverkas slutna systemets överföringsfunktion om man gör observatören
Man använder en observatör för att skatta tillståndsvariablerna i ett system, och återkopplar sedan från det skattade tillståndet. Hur påverkas slutna systemets överföringsfunktion om man gör observatören
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
Nyquistkriteriet, kretsformning
 Sammanfattning från föreläsning 5 2 Reglerteknik I: Föreläsning 6 Nyquistkriteriet, kretsformning Fredrik Lindsten fredrik.lindsten@it.uu.se Kontor 2236, ITC Hus 2, Systemteknik Institutionen för informationsteknologi
Sammanfattning från föreläsning 5 2 Reglerteknik I: Föreläsning 6 Nyquistkriteriet, kretsformning Fredrik Lindsten fredrik.lindsten@it.uu.se Kontor 2236, ITC Hus 2, Systemteknik Institutionen för informationsteknologi
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24-4-22 Sal () TER2,TER3,TERF (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24-4-22 Sal () TER2,TER3,TERF (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Laplacetransform, poler och nollställen
 Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
TENTAMEN: DEL A Reglerteknik I 5hp
 TENTAMEN: DEL A Reglerteknik I 5hp Tid: Fredag 4 mars 204, kl. 8.00-.00 Plats: Magistern Ansvarig lärare: Hans Norlander, tel. 08-473070. Tillåtna hjälpmedel: Kursboken (Glad-Ljung), miniräknare, Laplace-tabell
TENTAMEN: DEL A Reglerteknik I 5hp Tid: Fredag 4 mars 204, kl. 8.00-.00 Plats: Magistern Ansvarig lärare: Hans Norlander, tel. 08-473070. Tillåtna hjälpmedel: Kursboken (Glad-Ljung), miniräknare, Laplace-tabell
Industriell reglerteknik: Föreläsning 3
 Industriell reglerteknik: Föreläsning 3 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 19 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Industriell reglerteknik: Föreläsning 3 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 19 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
TSRT91 Reglerteknik: Föreläsning 1
 TSRT91 Reglerteknik: Föreläsning 1 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Diverse 1 / 27 Föreläsare och examinator: Martin Enqvist Lektionsassistent: Angela Fontan
TSRT91 Reglerteknik: Föreläsning 1 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Diverse 1 / 27 Föreläsare och examinator: Martin Enqvist Lektionsassistent: Angela Fontan
ERE 102 Reglerteknik D Tentamen
 CHALMERS TEKNISKA HÖGSKOLA Institutionen för signaler och system Reglerteknik, automation och mekatronik ERE 02 Reglerteknik D Tentamen 202-2-2 4.00 8.00 Examinator: Bo Egar, tel 372. Tillåtna hjälpmedel:
CHALMERS TEKNISKA HÖGSKOLA Institutionen för signaler och system Reglerteknik, automation och mekatronik ERE 02 Reglerteknik D Tentamen 202-2-2 4.00 8.00 Examinator: Bo Egar, tel 372. Tillåtna hjälpmedel:
Välkomna till TSRT15 Reglerteknik Föreläsning 2
 Välkomna till TSRT15 Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till TSRT15 Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Kort introduktion till Reglerteknik I
 Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars egenskaper vi vill studera/styra. Vi betraktar system som har
Kort introduktion till Reglerteknik I Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars egenskaper vi vill studera/styra. Vi betraktar system som har
Industriell reglerteknik: Föreläsning 6
 Föreläsningar 1 / 15 Industriell reglerteknik: Föreläsning 6 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Föreläsningar 1 / 15 Industriell reglerteknik: Föreläsning 6 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
TSRT91 Reglerteknik: Föreläsning 1
 1 / 27 Diverse TSRT91 Reglerteknik: Föreläsning 1 Föreläsare och examinator: Martin Enqvist Martin Enqvist Lektionsassistent: Yuxin Zhao Kursrum i Lisam Reglerteknik Institutionen för systemteknik Linköpings
1 / 27 Diverse TSRT91 Reglerteknik: Föreläsning 1 Föreläsare och examinator: Martin Enqvist Martin Enqvist Lektionsassistent: Yuxin Zhao Kursrum i Lisam Reglerteknik Institutionen för systemteknik Linköpings
TENTAMEN Reglerteknik 3p, X3
 OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 3p. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 3p. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
TSIU61: Reglerteknik. Regulatorsyntes mha bodediagram (1/4) Känslighet Robusthet. Sammanfattning av föreläsning 7
 Känslighet Robusthet. Sammanfattning av föreläsning 7") TSIU6 Föreläsning 8 Gustaf Hendeby HT 207 / 8 Innehåll föreläsning 8 TSIU6: Reglerteknik Föreläsning 8 Känslighet Robusthet Gustaf Hendeby ˆ Sammanfattning av föreläsning 7 ˆ Känslighet mot störningar
TSIU6 Föreläsning 8 Gustaf Hendeby HT 207 / 8 Innehåll föreläsning 8 TSIU6: Reglerteknik Föreläsning 8 Känslighet Robusthet Gustaf Hendeby ˆ Sammanfattning av föreläsning 7 ˆ Känslighet mot störningar
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-6-7 Sal () TER2 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-6-7 Sal () TER2 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
EL1000/1120 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
Reglerteknik AK, FRTF05
 Institutionen för REGLERTEKNIK Reglerteknik AK, FRTF05 Tentamen 3 april 208 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
Institutionen för REGLERTEKNIK Reglerteknik AK, FRTF05 Tentamen 3 april 208 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
TSIU61: Reglerteknik. Sammanfattning av föreläsning 8 (2/2) Andra reglerstrukturer. ˆ Sammanfattning av föreläsning 8 ˆ Framkoppling från störsignalen
 Andra reglerstrukturer. ˆ Sammanfattning av föreläsning 8 ˆ Framkoppling från störsignalen") TSIU61 Föreläsning 9 HT1 2016 1 / 26 Innehåll föreläsning 9 TSIU61: Reglerteknik Föreläsning 9 Andra reglerstrukturer hendeby@isy.liu.se ˆ Sammanfattning av föreläsning 8 ˆ Framkoppling från referenssignalen
TSIU61 Föreläsning 9 HT1 2016 1 / 26 Innehåll föreläsning 9 TSIU61: Reglerteknik Föreläsning 9 Andra reglerstrukturer hendeby@isy.liu.se ˆ Sammanfattning av föreläsning 8 ˆ Framkoppling från referenssignalen
ÖVNINGSTENTAMEN Reglerteknik I 5hp
 ÖVNINGSTENTAMEN Reglerteknik I 5hp Tid: När det passar dig Plats: Där det passar dig Ansvarig lärare: Någon bra person. Tillåtna hjälpmedel: Kursboken (Glad-Ljung), miniräknare, Laplace-tabell och matematisk
ÖVNINGSTENTAMEN Reglerteknik I 5hp Tid: När det passar dig Plats: Där det passar dig Ansvarig lärare: Någon bra person. Tillåtna hjälpmedel: Kursboken (Glad-Ljung), miniräknare, Laplace-tabell och matematisk
TENTAMEN I REGLERTEKNIK TSRT03, TSRT19
 TENTAMEN I REGLERTEKNIK TSRT3, TSRT9 TID: 23 april 29, klockan 4-9 KURS: TSRT3, TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 5.3, 7.3 KURSADMINISTRATÖR:
TENTAMEN I REGLERTEKNIK TSRT3, TSRT9 TID: 23 april 29, klockan 4-9 KURS: TSRT3, TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 5.3, 7.3 KURSADMINISTRATÖR:
TSIU61: Reglerteknik. Reglerproblemet. Innehåll föreläsning 12: 1. Reglerproblemet: Ex design av farthållare. Sammanfattning av kursen
 TSIU6: Reglerteknik Föreläsning 2 Sammanfattning av kursen gustaf.hendeby@liu.se TSIU6 Föreläsning 2 / 56 Innehåll föreläsning 2:. Reglerproblemet 2. Modellbygge ˆ Fysikalisk modell ˆ Identifiering (t
TSIU6: Reglerteknik Föreläsning 2 Sammanfattning av kursen gustaf.hendeby@liu.se TSIU6 Föreläsning 2 / 56 Innehåll föreläsning 2:. Reglerproblemet 2. Modellbygge ˆ Fysikalisk modell ˆ Identifiering (t
TENTAMEN I TSRT91 REGLERTEKNIK
 SAL: G, TERD TENTAMEN I TSRT9 REGLERTEKNIK TID: 7-- kl. 8: : KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 7-6994 BESÖKER SALEN: cirka
SAL: G, TERD TENTAMEN I TSRT9 REGLERTEKNIK TID: 7-- kl. 8: : KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 7-6994 BESÖKER SALEN: cirka
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 216-8-19 Sal (1) (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal som
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 216-8-19 Sal (1) (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal som
Föreläsning 1 Reglerteknik AK
 Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL En tillståndsmodell ges t.ex. av den styrbara kanoniska formen: s 2 +4s +1.
 REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL20 Lösningsförslag till tentamen 2009 2 5, kl. 4.00 9.00. (a) Laplacetransform av () ger s 2 Y (s)+4sy (s)+y (s) =U(s), och överföringsfunktionen blir G(s)
REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL20 Lösningsförslag till tentamen 2009 2 5, kl. 4.00 9.00. (a) Laplacetransform av () ger s 2 Y (s)+4sy (s)+y (s) =U(s), och överföringsfunktionen blir G(s)
Lösningar till Tentamen i Reglerteknik AK EL1000/EL1100/EL
 Lösningar till Tentamen i Reglerteknik AK EL000/EL00/EL20 20-0-3 a. Överföringsfunktionen från u(t) till y(t) ges av Utsignalen ges av G(s) = y(t) = G(iω) A sin(ωt + ϕ + arg G(iω)) = 2 sin(2t). Identifierar
Lösningar till Tentamen i Reglerteknik AK EL000/EL00/EL20 20-0-3 a. Överföringsfunktionen från u(t) till y(t) ges av Utsignalen ges av G(s) = y(t) = G(iω) A sin(ωt + ϕ + arg G(iω)) = 2 sin(2t). Identifierar
TSRT91 Reglerteknik: Föreläsning 11
 Föreläsningar / 5 TSRT9 Reglerteknik: Föreläsning Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar / 5 TSRT9 Reglerteknik: Föreläsning Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Välkomna till Reglerteknik Föreläsning 2
 Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
TENTAMEN I REGLERTEKNIK I
 TENTAMEN I REGLERTEKNIK I SAL: TER2 TID: 6 mars 2, klockan 8-3 KURS: TSRT9, Reglerteknik I PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 9 ANSVARIG
TENTAMEN I REGLERTEKNIK I SAL: TER2 TID: 6 mars 2, klockan 8-3 KURS: TSRT9, Reglerteknik I PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 9 ANSVARIG
Lösningsförslag till tentamen i Reglerteknik (TSRT19)
") Lösningsförslag till tentamen i Reglerteknik (TSRT9) 26-3-6. (a) Systemet är stabilt och linjärt. Därmed kan principen sinus in, sinus ut tillämpas. Givet insignalen u(t) sin (t) sin ( t) har vi G(i )
Lösningsförslag till tentamen i Reglerteknik (TSRT9) 26-3-6. (a) Systemet är stabilt och linjärt. Därmed kan principen sinus in, sinus ut tillämpas. Givet insignalen u(t) sin (t) sin ( t) har vi G(i )
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER1, TER2, TER3 TID: 15 mars 2017, klockan 8-13 KURS: TSRT12, Reglerteknik Y/D PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
TENTAMEN I REGLERTEKNIK Y/D SAL: TER1, TER2, TER3 TID: 15 mars 2017, klockan 8-13 KURS: TSRT12, Reglerteknik Y/D PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
TENTAMEN Reglerteknik 4.5hp X3
 OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 4.5hp för X3. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans
OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 4.5hp för X3. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: Ter2 TID:4 mars 207, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 0730-9699 BESÖKER SALEN:
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: Ter2 TID:4 mars 207, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 0730-9699 BESÖKER SALEN:
REGLERTEKNIK Laboration 5
 6 SAMPLADE SYSTEM 6. Sampling av signaler När man använder en dator som regulator, kan man endast behandla signaler i diskreta tidpunkter. T.ex. mäts systemets utsignal i tidpunkter med visst mellanrum,
6 SAMPLADE SYSTEM 6. Sampling av signaler När man använder en dator som regulator, kan man endast behandla signaler i diskreta tidpunkter. T.ex. mäts systemets utsignal i tidpunkter med visst mellanrum,
TSIU61: Reglerteknik
 TSIU61: Reglerteknik Föreläsning 11 Tidsdiskret implementering Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 11 Gustaf Hendeby HT1 2017 1 / 17 Innehåll föreläsning 11 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 11 Tidsdiskret implementering Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 11 Gustaf Hendeby HT1 2017 1 / 17 Innehåll föreläsning 11 ˆ Sammanfattning av föreläsning
Fjärde upplagan och tredje upplagan (båda 2006)
") Hans Norlander, IT-inst., Uppsala universitet, 2007-01-25 Reglerteknik Grundläggande teori Torkel Glad och Lennart Ljung En jämförelse mellan fjärde upplagan (2006) och tredje (2006) respektive andra upplagan
Hans Norlander, IT-inst., Uppsala universitet, 2007-01-25 Reglerteknik Grundläggande teori Torkel Glad och Lennart Ljung En jämförelse mellan fjärde upplagan (2006) och tredje (2006) respektive andra upplagan