Optimering av hybriddrift för Aurora MATTIAS ANDRÉ NIKOLA MRDJANOV JOHN SELIÖ
|
|
|
- Lina Strömberg
- för 8 år sedan
- Visningar:
Transkript
1 Optimering av hybriddrift för Aurora MATTIAS ANDRÉ NIKOLA MRDJANOV JOHN SELIÖ Kandidatarbete Stockholm, Sverige 2009

2 2

3 Optimering av hybriddrift för Aurora Mattias André Nikola Mrdjanov John Seliö Kandidatarbete MMKB 2009:x MKNB yyy KTH Maskinkonstruktion SE STOCKHOLM 3

4

5 Kandidatarbete MMKB 2009:x MKNB yyy Optimering av hybriddrift för Aurora Godkänt Examinator Ulf Sellgren Uppdragsgivare Kjell Andersson Mattias André Nikola Mrdjanov John Seliö Handledare Kjell Andersson Kontaktperson Kjell Andersson SAMMANFATTNING Tävlingen Eco Marathon som årligen arrangeras av Shell har som mål att utnyttja studenters innovations- och kreativitet för att ta fram konceptbilar med minsta möjliga bränsleförbrukning. Målet med projektet har varit att ta fram en optimerad hybriddrift för en framtida version av Aurora som tävlar i Urban Concept klassen. Denna ska även innehålla regenerativa bromsar som tar tillvara på rörelseenergin vid inbromsningarna. Först gjordes en litteraturstudie och två koncept togs fram för vidare utvärdering. Dessa har sedan utvärderats med hjälp av programmet Simulink som är en del av MATLAB. Stor vikt har lagts vid konstruktionen av dessa simuleringsmodeller för att få dem korrekta. Målet för optimeringen har varit att få den totala bränsleförbrukningen under en simulerad tävling så låg som möjligt. Rekommendationen för en framtida version av Aurora är att använda sig av det parallellhybridskoncept som beskrivs på sida 16 i denna rapport. En elmotor används för att accelerera och bromsa bilen medan förbränningsmotorn driver bilen vid konstant marschhastighet. Tanken med detta koncept har varit att minimera förlusterna vid omvandling av energi. Vid jämförelsen mellan de båda koncepten upptäcktes att parallellhybriden hade en förbrukning som var 4-5 % lägre än en seriehybrid för alla olika driftsförhållanden. Vid simuleringen har en körstil optimerad för just Eco marathon använts och ingen variation av denna har gjorts. Förluster i växlar och liknande har inte behandlats vid simuleringarna då dessa inte har varit relevanta för jämförelsen. Dessa förluster kan dock enkelt inkluderas i modellerna om så önskas. Den enskilda parameter som påverkade bränsleförbrukningen mest var verkningsgraden hos förbränningsmotorn. Däremot var rullmotståndet för bilen en viktig parameter. Vid en fördubbling av rullmotståndet ökade bränsleförbrukningen med 50 %. Rullmotståndet påverkas både av rullfriktionen och av vikten hos fordonet, det är alltså av yttersta vikt att göra bilen så lätt som möjligt. Den regenerativa bromsningen fungerar genom att motorns styrelektronik tar ut en ström ur motorn och transformerar upp spänningen till den aktuella kondensatorspänningen. Vid bromsning från marschfart återvinns ca 70 % av rörelseenergin, tillräckligt för en halv minuts körning vid marschfart eller acceleration upp till 21 km/h. Den regenerativa bromsningen gav en relativt liten fördel men vinsten ökar ju oftare bilen ska bromsas och accelereras. 1

6 2

7 BachelorThesis MMKB 2009:x MKNB yyy Optimal hybrid driveline for Aurora Mattias Andre Nikola Mrdjanov John Seliö Approved Examiner Ulf Sellgren Commissioner Kjell Andersson Supervisor Kjell Andersson Contact person Kjell Andersson ABSTRACT The goal of this project has been to develop a new hybrid driveline concept, including regenerative braking, for a future version of KTH s latest Eco-car. The car, Aurora, competes in the urban concept class of Shell Eco-marathon. Students from universities all over the world struggle to race their specially built cars a set distance on the least amount of fuel. In the urban concept class the cars are required to resemble road vehicles to at least some degree. The new driveline should also make use of regenerative braking so that the car s kinetic energy can be recovered and stored in the vehicle s super-capacitor. At first, recent literature on the subject of hybrid vehicles and work on Aurora s predecessor Spiros was studied. With the knowledge of advantages and drawbacks of existing drivelines, two concepts were chosen for further evaluation. These concepts were then modeled in Simulink and simulations were carried out where various parameters were changed in order to maximize fuel efficiency. Great effort has been put into these models to make them as accurate and valid as possible. The recommendation on upgrading the Aurora for its next version is to use the parallel-hybrid driveline concept described on page 16. An electric motor is used to accelerate the car to a designated speed since an electric motor is the most efficient at providing torque at low speeds. After accelerating, an internal combustion engine will power the car. The two main advantages of this system is that energy conversion losses are kept at a minimum, and that the internal combustion engine will operate only at its optimal speed and power, resulting in maximized efficiency. In simulations, the fuel consumption of the parallel driveline was consistently found to be 4-5 % lower than that of the series-hybrid driveline. None of the dynamics in the gasoline engine have been modeled or studied. Its efficiency has been assumed to be constant in the narrow operating range in which the motor is used. Engine efficiency is the most critical factor for achieving low overall fuel consumption. One of the other parameters that influenced fuel consumption the most was rolling resistance. When doubled it would increase the fuel consumption by 50 %. The rolling resistance depends on the rolling resistance coefficient and the total weight of the car. Regenerative braking was able to recover about 70 % of the kinetic energy during an average stop, enough to run the car for half a minute at cruising speed or accelerate the car to 21 km/h. 3

8 The advantage of regenerative braking was relatively small but would increase if more stops were required during the race. 4

9 Här listas beteckningar och förkortningar som har använts i detta kandidatarbete. NOMENKLATUR Beteckningar Symbol Beskrivning A Area (m 2 ) C Kapacitans (F) Luftmotståndskoefficient (-) E Elmotorns EMK (V) F Kraft (N) Ankarström (A) Kondensatorström (A) Spänningskonstant (Vs/rad) Momentkonstant (Nm/A) M Moment (Nm) m Massa (kg) P Effekt (W) Q Laddning (Coloumb) r Radie (m) Ankarresistans (Ω) t Tjocklek (m) Ankarspänning (V) Kondensatorspänning (V) v Hastighet (m/s) W Energi (J) Verkningsgrad (-) Rullmotståndskoefficient (-) Densitet (Kg/m 3 ) Vinkelhastighet (rad/s) Förkortningar CVT DC Continuously variable transmission Direct Current (Likström) 5
 Ankarspänning (V) Kondensatorspänning (V) v Hastighet (m/s) W Energi (J) Verkningsgrad (-) Rullmotståndskoefficient (-) Densitet (Kg/m 3 )")
10 ELM FBM GEN HCCI IMA RPM SP Elmotor Förbränningsmotor Generator Homogeneous Charge Compression Ignition Integrated Motor Assist Revolutions Per Minute (varvtal) Superkondensator 6
")
11 INNEHÅLLSFÖRTECKNING SAMMANFATTNING... 1 ABSTRACT... 3 NOMENKLATUR... 5 INNEHÅLLSFÖRTECKNING INTRODUKTION Bakgrund Syfte Avgränsning Metod REFERENSRAM Bilen Förbränningsmotorn Hybrider Toyota Prius, One-Mode EVT Baldos Honda Civic, Integrated Motor Assistance Tävlingsbanan Tävlingen METOD Konceptutveckling Seriehybrid Parallellhybrid Modellering Elmotorn Förbränningsmotorn Superkondensatorn Strömbegränsning Farthållare Laddregulator Parallellhybridens styrsystem Bilens dynamik Sammanställda simuleringsmodeller Simulering RESULTAT Parallellhybrid

12 Inverkan av rullmotstånd Seriehybrid Inverkan av rull- och luftmotstånd Laddningsregleringens påverkan Jämförelse av resultat Regenerativ bromsning DISKUSSION OCH SAMMANFATTNING Diskussion Simulering Komponenter Bilens dynamik Har förbrukningen överskattats eller underskattats? Slutsatser Rekommendationer vid framtida arbete REFERENSER BILAGA A: Parallellhybridens styrsystem BILAGA B: Exempel på simuleringsprotokoll

13 1 INTRODUKTION Detta kapitel beskriver bakgrund, syfte, avgränsning och metod för det genomförda kandidatarbetet. 1.1 Bakgrund Aurora är KTHs bidrag i Urban Concept klassen till Shell-Eco Marathon. Det är en tävling som arrangeras årligen av Shell och som går ut på att köra så långt som möjligt med minsta möjliga energiförbrukning. Fordonen i Urban Concept klassen är tänkta att likna vanliga bilar både i utseende och teknikinnehåll. Maskinkonstruktion HK 2009 ansvarar för att ta fram hybriddriften till detta års version. Målet i detta kandidatarbete är att tänka lite längre och ta fram en optimal hybriddriftslösning för en nästkommande Aurora version. Denna hybriddriftslösning ska även inkludera regenerativ bromsning. 1.2 Syfte Syftet med projektet är att ta fram en optimerad hybriddriftslösning för Aurora. Fokus kommer att ligga på att den totala bränsleförbrukningen för driften ska vara så låg som möjligt. Denna lösning ska även vara robust och kunna prestera bra med olika yttre förutsättningar. I projektet ska både parallell- och seriehybriddrift utvärderas för att se vilket av koncepten som kan uppnå den högsta verkningsgraden. Slutprodukten ska vara ett drivlinekoncept med regenerativ bromsning som skall kunna arbetas vidare på och detaljkonstrueras senare. 1.3 Avgränsning Projektet kommer att begränsas till simuleringar och inga tester av drivlinan kommer att utföras. För att begränsa omfattningen av projektet har det bestämts att enbart titta på lösningar med förbränningsmotorn Honda GX-25 som främst har använts som reservmotor samt samma superkondensator som har använts vid tidigare tävlingar. Honda-motorn har valts för att det finns mer data att tillgå än om HCCI-motorn som fortfarande utvecklas för 2009 års version. Shell-Eco Marathon har ett reglemente som starkt begränsar vad som får och inte får finnas i bilen. Koncepten som utvecklas kommer att hållas inom ramarna för reglementet. Förbränningsmotorn kommer endast att användas vid ett specifikt smalt varvtalsregister varvid dess verkningsgrad kan antas vara konstant. Inga analyser av förbränningsmotorns egenskaper kommer att utföras. 1.4 Metod Olika koncept kommer att tas fram och utvärderas med avseende på verkningsgrad och realiserbarhet. Dessa kommer att tas fram genom att se på hybridlösningar som fordonsindustrin för närvarande använder sig av, men även genom att ta fram egna koncept inom projektgruppen. Några koncept kommer att studeras närmare genom Simuleringar. Koncepten som väljs ut för vidareutveckling ska vara realiserbara, kunna uppnå god verkningsgrad vid den tänkta körningen och inte vara för komplexa. Alltför komplexa system skulle inte kunna utvärderas på en så detaljerad nivå att resultaten skulle bli pålitliga. Resultaten från simuleringarna kommer ligga till grund för ett förslag på en framtida hybriddrift för Aurora. Vid simuleringarna kommer en mall användas för att jämföra resultaten mellan de olika körningarna. 9

14 10

15 2 REFERENSRAM Detta kapitel presenteras Aurora med dess tekniska data, olika tekniska lösningar för hybriddrifter och information om 2009 års tävling och tävlingsbana. 2.1 Bilen Aurora är KTH:s bidrag till 2009 års Shell Eco Marathon tävling som går i Lausitz, Tyskland. Bilen är ett litet enmansfordon som ska köras 7 varv med en total sträcka på strax över 22 km på under 53 minuter. Data om bilen har beräknats, uppskattats och tagits från tidigare arbeten på dess föregångare, Spiros, för att utgöra underlaget vid optimeringsarbetet. Då Aurora i skrivande stund inte är färdigkonstruerad har en del antaganden gjorts utgående från konstruktörernas estimeringar och mätningar av Spiros. Detta för att erhålla ett så realistiskt driftsscenario som möjligt. Dessa värden redovisas nedan. Drivhjulets ytterradie har mätts till 0,28 m. Bilens massa inklusive förare är 200 kg, Fordonets massa exklusive förare förväntas bli 150 kg. Luftmotståndskoefficient har liksom i tidigare arbeten antagits vara 0,3. Rullmotstånds koefficient har i tidigare arbeten på föregångaren Spiros uppskattats till 0,005. Aurora är tänkt att ha samma hjulupphängning så rullmotståndet bör inte skilja sig nämnvärt från detta Förbränningsmotorn Vid ett test av förbränningsmotorn Honda GX-25 som har utförts på KTH Maskinkonstruktion, Forsman, Karlsson och Nisserud, 2008, framkom det att intervallet med högst verkningsgrad inträffar vid RPM och att verkningsgraden då är ~15 %. Motorn utvecklar då ~650 W vilket kommer vara mer än tillräckligt för både framdrivning och laddning av superkondensatorn. Tillverkaren hävdar att motorn förbrukar 340 g bränsle per kwh, senast besökt , detta skulle innebära en verkningsgrad på ~24 %, se ekvation. (1.1). Energiinnehållet i 95-oktanig bensin är kj/kg eller kj/l vid 15 C. verkningsgrad E bränsle 3600sekunder Bränsleförbrukning 0, 2468 (1.1) 2.2 Hybrider Det finns idag på fordonsmarknaden många existerande hybridkoncept där de flesta är av typen parallellhybrid. Det kanske mest kända fordonet på marknaden idag är Toyotas Prius. Under förstudien har tre koncept undersökts närmare, dessa redovisas nedan. Informationen har sökts i främst artiklar som har funnits tillgängliga på internet men även ur tidigare års kandidatarbeten. 11

16 2.2.1 Toyota Prius, One-Mode EVT EVT står för Elektriskt Variabel Transmission och denna är patenterad av Toyota och används i deras modell Prius. I den är FBM och två elmotorer kopplade till en planetväxel. FBM effekt går in via planetbäraren. Den ena elmotorn är kopplad till det inre solhjulet i planetväxeln. Denna fungerar som generator när FBM går och ger ström till den andra elmotorn som driver det yttre solhjulet, men den laddar även bilens batteri. Fördelningen av kraften från motorerna sker automatiskt och bilen kan köras med enbart förbränningsmotorn, enbart elmotorn eller båda i kombination. Vid körläget ECO bestämmer styrsystemet automatisk vilken som är den optimala fördelningen mellan de olika motorerna. Man kör då exempelvis med helt elektrisk drift vid låga hastigheter och rangeringsmanövrar. Växeln som bara har en mekanisk utväxling fungerar bäst under vissa hastighets- och momentförhållanden. Planetväxeln är i sin tur kopplad till bilens differential med en reduktionsväxel via det yttre solhjulet Baldos Baldos var Luleås Tekniska Universitets bidrag i Eco Marathon tävlingen Detta bidrag vann Michelin Grand Prize vilket är förstapriset i klassen förbränningsmotorer. De klarade av att som bäst köra 299 kilometer på motsvarande en liter bensin. Deras hybridkonstruktion var en seriehybrid med en etanoldriven förbränningsmotor. Denna driver en generator som laddar upp superkondensator som driver en elmotor monterad i vänster bakhjul Honda Civic, Integrated Motor Assistance Civic IMA är Hondas hybridbidrag till fordonsmarknaden. IMA står för Integrated Motor Assistance. Detta innebär att en elmotor som även fungerar som en generator sitter monterad på drivaxeln från förbränningsmotorn, mittemellan motorn och kopplingen, se figur 1. En stor skillnad mellan Civic och Prius är att den förstnämnda alltid drivs av förbränningsmotorn. Elmotorn, som namnet antyder, assisterar bensinmotorn i olika driftsförhållanden som vid accelerationer, uppförsbackar och vid omkörningar. Vid inbromsningar och stillestånd som exempelvis vid rödljus stängs motorn av helt förutsatt att den uppnått rätt arbetstemperatur. Den är även utrustad med en steglös CVT-transmission, liknande den som finns i mopeder och snöskotrar. Denna göra att motorn kan arbeta närmre sin optimala driftspunkt och ytterligare höja verkningsgraden något. Figur 1: Honda Civic IMA 12

17 2.3 Tävlingsbanan Vid simuleringar av drivlinan kommer 2009 års bana, Eurospeedway belägen i Lausitz, att användas som underlag. Från Eco Marathons hemsida finns en detaljerad karta över den med höjdangivelser, se figur 2, där även den tänkta rutten är markerad. Med hjälp av den kommer en funktion att byggas som ger lutningen för varje position på banan. Detta kommer att ge en körning med uppförsbackar och nedförsbackar som belastar bilen. Eftersom hastigheten kommer att vara under 30 km/h kommer centripetalaccelerationen i kurvorna vara så låg att en konstant hastighet över hela banan kan hållas utan inbromsning i kurvorna. Totalt ska 7 varv köras med en längd av 3173 m per varv och en total längd på m inkluderat skillnaden mellan start och målgång. Under dessa 7 varv ska tre stycken stop and go utföras, det vill säga inbromsning till stillastående för att sedan accelerera upp och fortsätta loppet. Figur 2: Tävlingsbanan 2.4 Tävlingen Shell har ett reglemente för tävlingen som starkt begränsar vad som får och inte får finnas i bilen. De regler som koncepten kommer att begränsas av är: Lagring av elektrisk energi får endast ske i en superkondensator. Den maximalt tillåtna spänningen i systemet är 48 V. Maximalt tillåten elektrisk effekt i kondensatorn är 1000 W, både som effektuttag och för laddning. Högsta tillåtna tid för att ta sig runt banan är 53 min. Tre stycken start och stopp ska göras. Tidsbegränsningen av loppet och start/stopp medför att en medelhastighet av ca km/h är nödvändig. Hastigheten är en avgörande faktor för den faktiska energiförbrukningen. Den låga hastigheten medför att bilen kommer kunna åka med konstant fart runt banan. Om förbränningsmotor används måste den kunna frikopplas så att fordonet kan stå stilla med motorn igång. 13

18 14


19 3 METOD Detta kapitel beskriver arbetsprocessen för projektet där först ett antal koncept har tagits fram för att därefter simuleras och utvärderas. 3.1 Konceptutveckling Vid utvärdering av koncepten har hänsyn tagits till deras potentiella verkningsgrad och deras komplexitet. Ett hybridkoncept liknande One-Mode EVT (Prius) utvecklas för närvarande på KTH Maskinkonstruktion till 2009 års Aurora och kommer därför inte att undersökas. Två koncept har valts ut för modellering och simulering. Ett är av typen parallellhybrid liknande IMA och ett är av typen seriehybrid liknande den som använts i Baldos. I båda dessa koncept ska regenerativ bromsning implementeras. Detta genom att elmotorn som används för att driva bilen kommer att gå som generator vid inbromsning och omvandla bilens rörelseenergi till elektrisk energi och lagra den i superkondensatorn. Att motorn arbetar med så bra verkningsgrad som möjligt samtidigt som den tillförda effekten är tillräcklig är ett måste. Energiomvandlingar som exempelvis från mekanisk till elektrisk bör vara så få som möjligt för att minska omvandlingsförlusterna Seriehybrid I en seriehybridbil ligger förbränningsmotorn och elmotorn i serie med varandra. FBM är kopplad till en generator och har som uppgift att producera elektricitet för elmotorn/motorerna vilka står för fordonets framdrivning. Det finns alltså ingen mekanisk koppling mellan förbränningsmotorn och elmotorn. Den elektriska energin lagras i batterier eller som i det här fallet, en superkondensator. FBM kommer att vara låst till att arbeta vid det varvtalet där den har sin bästa verkningsgrad. Konceptet illustreras i figur 3 nedan Funktionsbeskrivning Figur 3: Seriehybrids koncept Förbränningsmotorn kommer att arbeta vid sitt optimala varvtal vilket enligt tidigare testkörningar ligger runt 6000 RPM. Motorn utvecklar då ~650W, denna effekt kommer att konverteras till elektrisk energi i generatorn som laddar SP från vilken elmotorn som driver bilen tar sin energi. FBM kommer först att ladda upp SP till en övre nivå för att därefter stängas av. Den kommer sedan att starta när laddningen når en kritisk lägre nivå och påbörja uppladdningen. Hjulen drivs av en elmotor via en reduktionsväxel. 15


20 3.1.2 Parallellhybrid I en parallellhybrid arbetar elmotorn/motorerna parallellt med förbränningsmotorn. Dessa kommer att vara kopplade till hjulaxeln via varsin växel. FBM kommer enbart att arbeta i sitt optimala varvtalsregister, då kommer elmotorn att gå som generator och ladda superkondensatorn. När sedan superkondensatorn är fulladdad kommer FBM enbart stå för framdrivningen. Vid accelerationer och låga hastigheter kommer elmotorn ensam att stå för framdrivningen tills det att rätt hastighet har uppnåtts och FBM tar över. I figur 4 nedan visas ett blockschema över konceptet Funktionsbeskrivning Figur 4: Parallellhybrid koncept Motorn kommer låsas till att endast arbeta i det intervallet där den har sin bästa verkningsgrad. Elmotorn kommer att användas vid accelerationer och låga hastigheter. Bilen kommer att i de hastigheter som motsvarar rätt varvtal på FBM att helt drivas av denna och även ladda superkondensatorn. När superkondensatorn sedan når en övre laddningsnivå, kommer laddningen att upphöra. Driften kommer sedan skifta tillbaka om laddningen i SP når sin lägsta kritiska nivå. Den övre nivån i SP kommer att bestämmas så att en regenerativ bromsning från full fart inte överladdar kondensatorn. Det bör även finnas en lösning som gör att fordonet kan starta och accelerera iväg utan att superkondensatorn har någon laddning men detta kommer inte implementeras eftersom det inte kommer inträffa under tävling. I tabell 1 nedan visas de tänkta driftssätten. Vilken motor som driver bilen är en funktion av hastigheten, accelerationen och kondensatorns laddning. 16

21 Tabell 1: Tillståndsmatrisen, driftssätt som funktion av hastighet, acceleration och laddningen i superkondensatorn. HASTIGHET ACCELERATION LADDNING i SP DRIFT ANM. <10 % FBM Laddning POS % EL >98 % EL <10 % FBM Laddning LÅG % EL >98 % EL <10 % - Regenerering NEG % - Regenerering >98 % - Regenerering <10 % FBM Laddning POS % EL >98 % EL <10 % FBM Laddning MEDEL % EL >98 % EL <10 % - Regenerering NEG % - Regenerering >98 % - Regenerering <10 % FBM POS % FBM Laddning >98 % FBM Laddning upphör <10 % FBM Laddning HÖG % FBM Laddning >98 % FBM Laddning upphör <10 % - Regenerering NEG % - Regenerering >98 % - Regenerering 3.2 Modellering För att kunna optimera de olika hybriddrifterna modellerades koncepten i Simulink. Simulink är nära kopplat till MATLAB och erbjuder möjligheten att representera matematiska funktioner med blockscheman. I Simulink finns ett stort bibliotek av färdiga block för att förenkla modelleringsarbetet. För att modellera drivlinan har block ur SimDriveline använts till förbränningsmotorn, tröghetsmoment och växellådor osv. Driveline-blocken skiljer sig från vanliga Simulink-block genom att deras anslutningar motsvarar mekaniska axlar. Blocken kan både producera och förbruka effekt, det är alltså inte vanliga in och utgångar. Först modellerades ingående komponenter var för sig och dess funktioner verifierades allteftersom. Sedan sattes komponenterna ihop till två kompletta modeller av drivlinorna och försågs med varsitt styrsystem. För att enkelt kunna variera parametrar valdes att samla dem alla i en MATLAB-fil tillhörande Simulink modellen. Innan en simulering kan utföras måste parameterfilen köras i MATLAB för att definiera alla parametrar som används. 17
22 3.2.1 Elmotorn Elmotorns modell baseras på en permanentmagnetiserad DC-motor. Sambandet mellan motorns elektriska och mekaniska storheter enligt ekvation (1.2) representerades med matematiska block som byggdes in i ett subsystem se figur 5. U E R I A A A M I k E A k e t (1.2) Figur 5: Elmotorns in- och utgångar. Blocket tar in kondensatorns spänning och signalen gaspedal. I motorn läggs ett moment på utgående axel proportionellt mot strömmen. Vinkelhastigheten återkopplas internt för att beskriva motorns EMK som i sin tur påverkar strömmen genom motorn. Elektrisk effekt kopplas till kondensatorn och levererar effekt med antingen positivt eller negativt tecken till kondensatorn. Den är positiv vid motordrift och negativ vid generatordrift. Effekten används eftersom motorstyrningen kan transformera spänningen upp eller ner med hjälp av pulsbreddsmodulering. Strömmen i motorns lindningar är alltså inte lika stor som den som tas från kondensatorn. Parametrarna utgår från motorn GNM70130 som är en 24v permanentmagnetiserad DC motor på 750W. En motor med borstar är lättare att modellera och denna har ett mycket utförligt datablad, senast besökt , vilket är en bidragande orsak till att den använts istället för t.ex. Spiros borstlösa motor. Skillnaderna mellan de två motortyperna kan i simuleringssammanhang anses vara obetydliga. Den regenerativa bromsningen fungerar genom att man begär en negativ ström i motorn. Det ger upphov till ett negativt moment som bromsar axeln och en negativ elektrisk effekt som tas från kondensatorn. Kondensatorns energi ökar således medan bilens hastighet minskar. Motorstyrningen antas kunna transformera upp spänningen E till den aktuella kondensatorspänningen Förbränningsmotorn Förbränningsmotorn har simulerats med hjälp av Gasoline Engine blocket från simdriveline. Funktionen är sådan att ett moment tillförs utgående axel beroende på rotationshastighet enligt en momentkurva. Insignalen motsvarar efterfrågat moment. FBM blocket innehåller en gasoline 18
23 engine och även sensorer som känner av vinkelhastigheten på axeln. Eftersom verkningsgraden antagits vara konstant över det driftsintervall som använts har bränsleförbrukningen uppskattats genom att dividera den mekaniska effekten med verkningsgraden. Detta gäller för både serieoch parallellhybriden. I figur 6 nedan visas motorblocket med sin in respektive utgångar. Figur 6: Honda-motors in och utgångar Superkondensatorn Superkondensatorn bygger på att effekten divideras med kondensatorspänningen för att erhålla kondensatorströmmen. Strömmen används för att beräkna förlusterna i kondensatorns inre resistans. Genom att strömmen integreras till laddning och divideras med kapacitansen fås kondensatorspänningen enligt ekvation (1.3). Superkondensatorn block kan ses i figur 7 nedan. Q I P / U c c Q (1.3) U C Figur 7: Superkondensatorblocket med sina in respektive utgångar Strömbegränsning Strömmen i kondensatorn får aldrig överskrida 20 A och därför byggdes en proportionell regulator för att begränsa denna. Regleringen mäter kondensatorströmmen och jämför med ett önskat värde på kondensatorström, sedan anpassas elmotorns duty cycle så att den önskade strömmen uppnås. Önskas en positiv ström så accelererar bilen och efterfrågas negativ ström så bromsas bilen och kondensatorn laddas Farthållare Båda bilarna har en farthållare som består av en proportionell regulator och en matris med önskade hastigheter för olika tidpunkter. Matrisen bestämmer när bilen skall accelerera och utföra sina stopp under körningen. Hastighetsmatrisen ligger sist i parameterfilen och hämtas till modellen från Matlabs workspace. Farthållarens uppbyggnad återfinns i figur 8 nedan. 19
24 Figur 8: Farthållarens enkla uppbyggnad med in- och utgångar. Figur 9 visar hur gaspådraget varierar med tiden. Farthållaren försöker i detta exempel hålla hastigheten 33 km/h genom att variera gaspådraget. Detta samtidigt som bilen påverkas av banans varierande lutning som omväxlande bromsar och ger tillskott till hastigheten. Vid toppen där hastigheten når över 35 km/h ger farthållaren inget gaspådrag alls utan bilen rullar av bara lutningen. Farthållaren fungerar mycket väl och håller hastigheten mellan 33 och 32.4 km/h under hela varvet utom i nedförsbacken där bilen rullar fritt. Figur 9: Hastigheten under körning och gaspådragets variation med tiden Laddregulator Laddningen i seriehybriden regleras på enklast möjliga sätt genom att förbränningsmotorn börjar arbeta och ladda kondensatorn när spänningen hamnar under ett tröskelvärde. Laddningen fortsätter sedan till dess att spänningen uppnått ett övre tröskelvärde. Strömbegränsning implementerades på försök även i laddregulatorn men orsakade stora problem i simuleringen och fick därför utelämnas. Förbränningsmotorn visade sig arbeta i rätt varvtalsområde och med rätt effekt direkt kopplad till elmotorn även utan strömbegränsning. Laddningsregulatorblocket illustreras i figur 10 nedan. 20
25 Figur 10: Laddningsregulatorn som styr laddningen av superkondensatorn Parallellhybridens styrsystem Parallellhybridens styrsystem byter mellan elmotordrift och förbränningsmotordrift beroende på bilens hastighet. Styrningen bestämmer vilken ström som ska tas från kondensatorn, i laddning eller elmotordrift. Tillståndsmatrisen från konceptutvecklingen kunde förenklas eftersom många av tillstånden aldrig kommer inträffa under ett lopp och än mindre under simulering. Alla tillstånd där laddningen är låg och bilens hastighet är låg har utelämnats ur styrningen. Bara de nödvändiga tillstånden har tagits med. Styrningen har implementerats som en embedded MATLAB funktion bestående av en rad if-satser, en för varje tillstånd. Denna återfinns i bilaga A. Simuleringen av olika marschhastigheter utfördes genom att ändra marschhastigheten v i parameterfilen och vmarch i ett Embedded function-block i Simulinkmodellen, denna bestämmer vid vilken hastighet bilen skall drivas av FBM i stället för ELM, se figur. 11. Figur. 11: Embedded Function-block bestämmer utifrån hastighet, acceleration och kondensatorspänning huruvida FBM eller ELM skall driva bilen Bilens dynamik I modellen finns luftmotstånd, rullmotstånd, bilens tröghet och inverkan av banans lutning representerade. Förlusterna adderas och läggs på huvudaxel som ett bromsande moment. Bilens tröghet är ekvivalent med ett tröghetsmoment på drivlinans axel. Till storleken är det bilens massa gånger hjulradien i kvadrat. Rullmotståndet antas vara konstant och motståndskraften proportionell mot bilens massa. Kraften från luftmotståndet F beräknas enligt ekvation (1.4) där A är frontalarean, är luftens densitet, är hastigheten och C d är luftmotståndskoefficienten. A Cd v 2 2 F (1.4) l Motståndet som kommer av banans lutning beräknades med hjälp av höjdangivelserna på bankartan. Alla höjdangivelser och deras positioner i längsled skrevs i vektorer. En embedded l 21
26 MATLAB-function skrevs som läser in tillryggalagd sträcka och med hjälp av höjdangivelserna räknar ut banans lutning och returnerar momentet på drivaxeln. Allteftersom bilen rör sig längs banan kommer alltså momentet på drivaxeln ändras. En viss sträcka visade sig nedförslutningen vara så stor att bilen ökade farten till 35km/h och elmotorn började regenerera ström. Alla dessa tre motståndskrafter beräknas och adderas ihop i Förlustblocket, illustreras i figur 12. Det lägger sedan ut ett moment på hjulaxeln beroende på bilens hastighet och aktuellt läge på banan. Det finns en utgång där summan av förlustmomenten kan läsas av, negativt för bromsande och positivt för hjälpande. Figur 12: Förlustblocket med sin in respektive utgångar Sammanställda simuleringsmodeller De separata blocken sammanställdes och kompletterades sedan med fler komponenter som exempelvis växlar till de färdiga simuleringsmodellerna av de två koncepten. I figur 13 och 14 nedan visas de sammanställda Simulink-modellerna över serie- respektive parallellhybriden. Figur 13: Sammanställningsmodell över parallellhybridskonceptet. 22
27 Figur 14: Sammanställningsmodell över seriehybridskonceptet. 3.3 Simulering Som optimeringsstrategi valdes att till en början studera parametrarnas inverkan en i taget och söka optimum för varje parameter var för sig. Med lärdomarna om varje parameters påverkan från dessa simuleringar skulle ytterligare simuleringar göras för att kunna uppnå en ännu högre verkningsgrad. För att undersöka systemens robusthet gjordes även vissa experiment med bilens förutsättningar såsom rullmotstånd, luftmotstånd och vikt. Modellerna har körts upprepade gånger med olika parametervärden för att se vilka som har den största påverkan på bilens verkningsgrad. Först utfördes körningar med antagna parametervärden för att verifiera funktionen och samverkan mellan olika delsystem. Ett antal körningar gjordes också för att klargöra vilken hastighet man lämpligen skulle hålla för att hinna gå i mål under 53 minuter inklusive tre stopp. Efter varje körning har ett simuleringsprotokoll fyllts i där de viktigaste resultaten sammanfattas. I simuleringsprotokollen har även parameterfilen för den aktuella körningen och graferna med resultaten infogats. Med en sådan noggrann dokumentation är det mycket lätt att gå tillbaka och exakt reproducera en körning om tveksamheter kring resultaten uppstår eller om ytterligare mätningar i andra delar i modellen önskas. Ett exempel på simuleringsprotokoll återfinns i bilaga B. 23
28 24
29 4 RESULTAT I detta kapitel har de resultat som uppnåtts med de metoder som beskrivits i föregående kapitel samlats och analyserats. De parametrar som kom att påverka förbrukningen mest var verkningsgraden hos FBM, marschhastigheten och rullmotståndet (vilken indirekt påverkas av vikten). För parallellhybriden upptäcktes att även utväxlingen mellan elmotor och hjul hade en signifikant betydelse för den totala förbrukningen. Marschhastigheten visade sig vara en av de viktigaste påverkningsbara parametrarna för den slutliga förbrukningen. Det är alltså viktigt att planera loppet för att komma runt på strax under utsatt tid. Hastigheten har därför undersökts först med avsikten att erhålla en total tid på strax under 53 min. För båda koncepten undersöktes inverkan av utväxlingen mellan ELM och hjul vid simuleringarna. Det viktigaste som framkom var att en utväxling är nödvändig för att låta elmotorn arbeta vid ett högre varvtal och där igenom erhålla en högre verkningsgrad. För parallellkonceptet har denna utväxling även undersökts djupare då den helt klart hade stor betydelse för den totala förbrukningen. Denna utväxling hade inte samma genomslag för seriehybriden, utan den var ganska okänslig för små variationer i utväxlingen. Då FBM endast körs inom ett visst varvtalsregister har det antagits att verkningsgraden för den kan anses vara konstant vid simuleringarna. För seriehybriden har hela loppet simulerats för att erhålla en bättre konvergens av förbrukningen. Detta har inte varit nödvändigt för parallellkonceptet och där har endast, dvs. 2 varv med ett stopp simulerats. 4.1 Parallellhybrid Den första simuleringen gick ut på att undersöka hur bränsleförbrukningen påverkas av bilens marschhastighet. Som figur 15 nedan visar påverkar hastigheten bilens bränsleförbrukning negativt. Enligt förväntan så ökar bränsleförbrukningen med ökad hastighet. Det är därför viktigt att bilen håller rätt marschhastighet under loppets gång då bränsleförbrukningen ökar ca 10 % om bilen körs 30 km/h i stället för 26 km/h. Parametrar som hölls konstanta under simuleringen var,, verkningsgraden på FBM=15% och utväxlingen mellan elmotor och hjul var
30 Figur 15: Grafen ovan beskriver hur parallellhybriddrivlinans bränsleförbrukning varierar med marschhastigheten. Bilen kommer inte hinna åka i mål inom 53 minuter för hastigheten 24 km/h. Flera simuleringar med olika utväxlingar utfördes för den enligt föregående simulering bästa hastigheten och resultatet har sammanställts i grafen nedan, se figur 16. Detta för att finna den utväxling mellan ELM och hjulet där bränsleförbrukningen är som lägst. Det har gjorts genom att ändra utväxlingen el_utvaxling, i Parameterfilen. Parametrar som hölls konstanta under simuleringen var,, verkningsgraden på FBM=15% och marschhastigheten v =26 km/h. Figur 16: Bränsleförbrukningen som funktion av utväxling mellan hjul och elmotor. Den bästa utväxlingen mellan elmotor och hjul är 15 enligt figur 16. Mellan utväxlingen 6-15 varierar bränsleförbrukningen med ca: 8 %. För parallellhybridsdrivlinan används elmotorn för att accelerera upp bilen till marschhastighet. Verkningsgraden för ELM är varvtalsberoende och låg vid låga varvtal, vid accelerationer upp till marschhastighet är dess verkningsgrad därför låg. Genom att ändra på utväxlingen mellan ELM och hjulen körs den i ett högre varvtal från början och får då också en högre verkningsgrad, detta resulterar i att den totala bränsleförbrukningen minskar. För utväxlingar högre än 15 börjar bränsleförbrukningen öka, detta beror på att ELM nu körs i ett för högt varvtal (högre än det optimala för denna specifika motor) och resulterar i en lägre verkningsgrad. Inverkan av rullmotstånd Rullmotståndet och FBMs verkningsgrad påverkar bränsleförbrukningen avsevärt. För de olika verkningsgraderna ökar bränsleförbrukningen med 52 % vid en fördubbling av rullmotståndet till 0,01. Vid en försämring av verkningsgraden från % och från % ökar bränsleförbrukningen med 25, respektive 33 %. I figur 17 nedan visas rullmotståndet och verkningsgradens påverkan på den totala förbrukningen. 26
31 Figur 17: Bränsleförbrukningens påverkan av rullmotståndet och verkningsgraden hos FBM. Parametrar som hölls konstanta under simuleringen var, marschhastigheten v =26 km/h och utväxlingen mellan ELM och hjul var 15. Ett urval av simuleringsresultaten för parallellhybriden redovisas i tabell 2 nedan. Verknings -grad Tabell 2: De olika parametrarnas inverkan på förbrukningen för parallellhybriden. Rullmotstånd Utväxling mellan elmotor och hjul Förbrukad Energi (MJ) Luftmotståndskoefficient Bränsleförbrukning (km/l) 0,15 0,005 0,3 15 0, ,6 0,15 0,010 0,3 15 1, ,9 0,20 0,005 0,3 15 0, ,1 0,20 0,010 0,3 15 0, ,2 0,25 0,005 0,3 15 0, ,6 0,25 0,010 0,3 15 0, ,6 4.2 Seriehybrid För seriehybriden har hela loppet simulerats för att erhålla bättre konvergens av bränsleförbrukningen. Målet med varje simulering har varit att komma runt hela banan på 22,2 km med en tid som ligger strax under de 53 minuter tillåtna, detta ger en medelhastighet kring 26 km/h. Det har gjorts tre stopp där bilen står helt stilla i ca 4-5 sekunder. Kondensatorspänningen har avpassats för att erhålla en målgångsspänning som ligger strax över startspänningen, såsom tävlingsreglerna kräver. Det visade sig att få, långa, urladdningsförlopp av superkondensatorn var bättre för energiförbrukningen än många korta förlopp. Däremot uppstod problem när spänningen i kondensatorn började sjunka ner till nära eller strax under de 24 som ELM vill ha. Detta yttrade 27
 som är större än 1, vilket är omöjligt.")
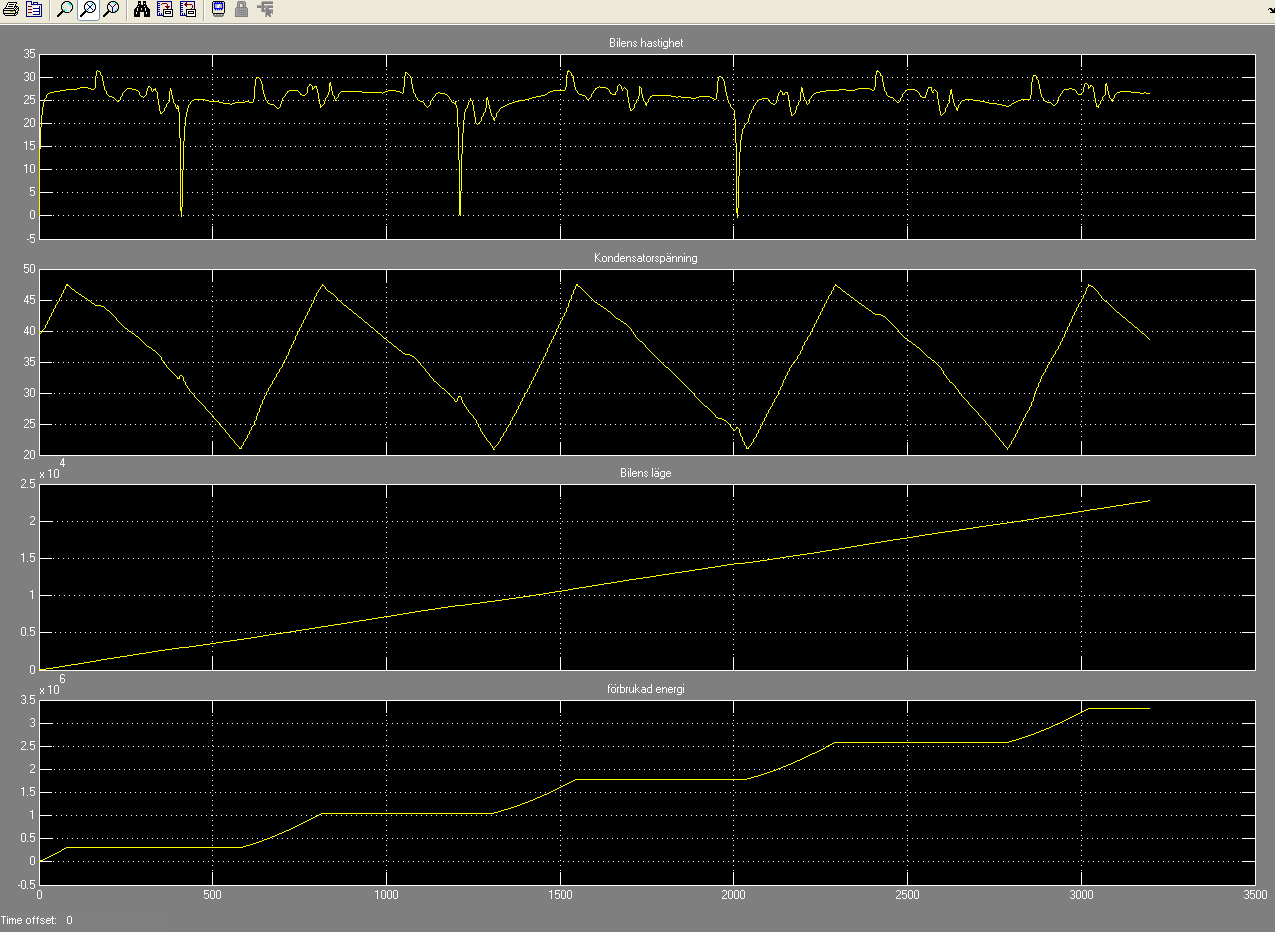
32 sig genom att motorn börjar förlora kraft och får svårt att behålla hastigheten vid uppförsbackar. Men med regleringen som användes i modellen uppstår problemet att elmotorn vill ha ett gaspådrag (duty cycle) som är större än 1, vilket är omöjligt. Detta yttrade sig med felmeddelanden och att simuleringen ej kunde utföras. Utväxlingen har inte samma höga påverkan för den totala förbrukningen i seriehybriden som för parallellhybriden. Det erhölls ingen mätbar skillnad i förbrukning. Detta beror troligen på att elmotorn driver bilen kontinuerligt och accelerationsförloppen därför inte får lika stort genomslag. Elmotorns verkningsgrad är baserad endast på det elektromagnetiska fältet och ankarresistansen. i dem och blir därför nära ett vid arbetsvarvtalet. Vid en eventuell framtida konstruktion måste det tas med i beräkningarna att utväxlingen mellan elmotor och hjul är av mycket stor vikt. Detta genom att säkerställa att elmotorn får arbeta vid en hög verkningsgrad (dvs. högt varvtal) och inte förbrukar onödigt mycket energi vid acceleration. Denna utväxling bör för en elmotor som arbetar mellan RPM vara mellan för att erhålla en god verkningsgrad. Vid en körning med rullmotståndet 0,01, en luftmotståndskoefficient på 0,3 och tillverkarens uppgifter om bränsleförbrukningen, dvs. en verkningsgrad kring 25 %, erhölls en förbrukning på 270 km/l. Spänningen i kondensatorn vid målgång låg en volt över startvärdet. Detta utan en regenerativ inbromsning vid målgången, vilket skulle tillföra ytterligare ca 0,5 V. Se figur 18 för hastigheten, kondensatorspänningen, körd sträcka och förbrukad energi som funktion av tiden. Tiden för målgång var 52 min och 6 sekunder. Figur 18: Hastigheten, kondensatorspänningen körd sträcka och förbrukad energi sfa. tiden vid körning med, och. 28
33 4.2.1 Inverkan av rull- och luftmotstånd För både serie- och parallellhybridskonceptet upptäcktes att rullningsmotståndskoefficienten har mycket stor inverkan på den totala energiförbrukningen. Det skiljer ~85 km/l mellan förbrukningen vid rullningsmotstånden 0,01 och 0,005 vid 15 % verkningsgrad, dvs. ökad förbrukning på hela 53 %. Luftmotståndskoefficienten hos Prius är enligt Toyota ungefär 0,25. Denna är beroende av geometrin hos den kropp kring vilken luften strömmar. För Aurora är luftmotståndskoefficienten okänd, men den bör ligga nära Priusens. Vid körning med en lägre luftmotståndskoefficient (0,2 istället för 0,3) minskade förbrukningen med ca 13 %. Det skiljde ca: 40 km/l i förbrukning vid 15 % verkningsgrad hos Honda-motorn. Tabell 3: De olika parametrarnas inverkan på förbrukningen för seriehybriden Rullmotstånd Spänningsskillnad i kondensatorn mellan start och mål (V) Förbrukad Energi (MJ) Verkningsgrad Luftmotståndskoefficient Bränsleförbrukning (km/l) 0,15 0,005 0,3-0,7 2, ,9 0,15 0,010 0,3-0,7 4, ,2 0,15 0,005 0,2 +2 2, ,20 0,005 0,3 +0, ,2 0,20 0,010 0,3 +2,1 3, ,3 0,25 0,005 0,3 +2,1 1, ,7 0,25 0,010 0,3 +1 2, , Laddningsregleringens påverkan Eftersom seriehybriden bara kör förbränningsmotorn intermittent kommer bränsleförbrukningen att fluktuera beroende på hur länge sedan det var som förbränningsmotorn laddade kondensatorn. I grafen i figur 19 visas bränsleförbrukning under loppets gång. Figur 19: Det konvergerande beteendet för bränsleförbrukningen hos seriehybriden km/l sfa. tiden. 29
34 Beroende på när bilen går i mål kan alltså förbrukningen hamna mellan 230 km/l och 245 km/l. Det är en stor skillnad som man absolut behöver ta hänsyn till när man styr laddningen av kondensatorn. Grafen visar förvisso ett konvergerande beteende som skulle jämnas ut vid en längre körning. Detta är dock en simulering av ett helt eco-marathon lopp och timingen spelar bevisligen en stor roll för tävlingsresultatet. 4.3 Jämförelse av resultat Bränsleförbrukningen är konsekvent mindre för parallelldrivlinan för alla simulerade driftsförhållanden, dessa presenteras i figur 20 nedan. Figur 20: Bränsleförbrukningen som funktion av verkningsgrad på FBM och rullmotståndskoefficient serie-, (SH) och parallellhybriden (PH). för För de båda koncepten skiljer sig bränsleförbrukningen mellan 4-5 % för de simulerade körningarna. Detta som förväntat till parallellhybridens fördel. Till skillnad från parallellhybriden måste all energi som går ut till hjulen omvandlas i flera steg i seriehybriden. All mekanisk energi från FBM måste omvandlas till elektrisk energi i generatorn. Sedan omvandlas den tillbaka till mekanisk energi i elmotorn. Det finns även förluster pga. den inre resistansen i kondensatorn. Omvandlingsförluster förekommer också hos parallellhybriden med den skillnaden att eftersom FBM driver bilen större delen av loppet så är det mindre energimängder som omvandlas. Simuleringen utfördes vid hastigheten v=26 km/h. 4.4 Regenerativ bromsning De regenerativa bromsarna fungerade som de skulle men när hastigheten blev för låg kunde inte bromsningen ske regenerativt längre. En mekanisk broms fick då byggas in i modellen för att bromsa från ca 10 km/h till stillastående. I figur 21 visas en stoppbromsning från 28,5 km/h med bilens hastighet i den övre grafen och kondensatorspänningen i den undre. 30
 2 2 mv 200 (28,5 / 3,6) Wk 6,29kJ (1.5) 2 2 Den återbördade energin till kondensatorn beräknas enligt ekv(1.")
35 Figur 21. Hastighet (över) och kondensatorspänning (under) vid bromsning från 28,5km/h till stillastående. Ur figuren avläses hastighet och kondensatorspänning före och efter bromsningen. Bilens kinetiska energi innan inbromsningen beräknas enligt ekvation.(1.5) 2 2 mv 200 (28,5 / 3,6) Wk 6,29kJ (1.5) 2 2 Den återbördade energin till kondensatorn beräknas enligt ekv(1.6) C ( Uefter U före ) 110 (47,55 46,69 ) Wc 4,44kJ (1.6) 2 2 Av den totala kinetiska energin innan bromsningen återbördas alltså ca: 70% till kondensatorn. Energiskillnaden från 28,5 till 9,4 km/h, där de mekaniska bromsarna tar över, var 5,59 kj. De mekaniska bromsarna tar alltså upp 0,7 kj, en mycket liten del av rörelseenergin. Den återvunna energin räcker till ca: 30 sekunders körning i 28 km/h eller en acceleration upp till 21 km/h. 31
36 32
37 5 DISKUSSION OCH SAMMANFATTNING I detta kapitel diskuteras och sammanfattas de resultat som presenterats i föregående kapitel. Det ges även rekommendationer för hur det framtida arbetet kan utföras. 5.1 Diskussion Det som har orsakat mest problem i detta projektarbete har varit att få simuleringsmodellerna att fungera som tänkt. Det har även uppstått problem med data och prestanda gällande både bilens dynamik och Honda-motorn. Nedan diskuteras och reflekteras över de begränsningar och antaganden som har gjorts samt vilka konsekvenser de får för slutresultatet Simulering Med styrsystemet som använts har det bitvis varit mycket svårt att få simuleringen att fungera. Ofta har simuleringen avbrutits av felmeddelanden mitt i körningen. Felmeddelandena har oftast handlat om singulariteter i lösningen eller problem att lösa på grund av en algebraisk loop. Troligen orsakas felen av att vi har ett styrsystem som är diskontinuerligt och ändrar utsignalen momentant. Det ställer till problem med återkopplingen i strömregleringen. Många gånger har felmeddelandena pekat på strömregleringen när förändringar gjorts på helt andra delar av modellen. Något som gjort det svårt att felsöka. Eftersom simuleringen innehöll diskontinuiteter kunde inte en lösare med variabel steglängd användas. Det faktum att en lösare med fast steglängd tar längre tid på sig och att den simulerade körningen är lång gjorde att beräkningarna tog relativt lång tid att utföra, speciellt för parallellhybriden. För att kunna utföra många körningar valdes att köra parallellhybriden endast två varv med ett stopp. Enstaka simuleringar utfördes också på hela lopp för att verifiera att förenklingen inte påverkade slut resultatet. Den största svårigheten i att göra en parameterstudie på ett system av den komplexitet som hybriddriften faktiskt är, ligger i att parametrarna är många. Det är inte rimligt att testa alla olika kombinationer av värden. Istället behöver man lägga tanke bakom varje körning och vara mycket observant på trender i resultaten för att se vilka områden i modellen som bör studeras närmre Komponenter Elmotorns och generatorns friktionsmoment har utelämnats i båda modellerna. Denna förenkling påverkar givetvis den slutliga förbrukningen, men eftersom målet har varit att jämföra två koncept som båda använder sig av samma elmotor anses det vara en rimlig förenkling att göra. Tilläggas skall också att en borstlös DC-motor, som alltid har använts i den verkliga bilen, har minimalt friktionsmoment eftersom den just inte har några borstar. Elmotorn är kopplad till hjulet via en växel som har utväxlingen 11 för seriehybriden och 15 för parallellhybriden. Detta är en hög utväxling som endast bedöms som rimlig via en planetväxel, dessa har en verkningsgrad som ligger i området kring %. Förluster i växlar har inte behandlats i simuleringarna eftersom båda drivlinorna har en växel mellan hjul och drivande motor. Växelns förluster förväntas alltså inte kunna påverka vilken av drivlinorna som är snålast. 33
38 5.1.3 Bilens dynamik Att rullmotståndet har stor inverkan på förbrukningen innebär också att den totala vikten hos bilen ska hållas så låg som möjligt, då en ökning av vikten skulle ge ett ökat rullmotstånd. Om vikten ökar med 10 % innebär det en ökning av rullmotståndet med 10 %, förutsatt att rullmotståndet beter sig linjärt. Vid låga hastigheter, dvs. låga Reynoldstal, är luftmotståndet proportionellt mot hastigheten och inte hastigheten i kvadrat. Reynoldstal i detta fall ligger i gränslandet mellan laminär och turbulent strömning. Det är alltså inte säkert att motståndet ökar med hastigheten i kvadrat. Det anses vara ett konservativt antagande att det beter sig kvadratiskt Har förbrukningen överskattats eller underskattats? Vissa förluster i komponenter har, som tidigare nämnts, utelämnats. Hade dessa tagits med i beräkningen hade givetvis förbrukningen varit högre. Däremot råder stor osäkerhet kring bilens egenskaper rörande rullmotstånd, luftmotstånd och förbränningsmotorns verkningsgrad. Dessa är de faktorer som har visat sig ha den allra största betydelsen för bränsleförbrukningen under ett lopp. Med stor osäkerhet i flera av de absolut viktigaste egenskaperna är det alltså omöjligt att avgöra om simuleringarna har överskattat eller underskattat drivlinornas prestanda. 5.2 Slutsatser För alla körningar med samma yttre förutsättningar har parallellhybriden visat sig ha bättre verkningsgrad. Tanken bakom konceptet var att använda effekten från förbränningsmotorn under största delen av loppet utan onödiga energiomvandlingar. Elmotorn används till accelerationerna där den är helt överlägsen förbränningsmotorn. Det har visat sig vara ett bra koncept som har potential att överträffa seriehybriden i total verkningsgrad. Bland andra fördelar kan nämnas att konceptet är mekaniskt enkelt jämfört med planetväxeln som ska användas år Rekommendationer vid framtida arbete Vid vidare utveckling av koncepten kan modellerna utvecklas ytterligare genom att införa förluster i växlar och friktionsmoment i ELM och GEN. Men även de logiska styrkretsarna för parallellhybriden bör utvidgas för att omfatta alla de tänkta körningsförhållandena. Då kan även mera dynamiska körningar analyseras. Ett system för att kunna köra på motorn vid låga hastigheter om laddningen i kondensatorn inte är tillräcklig för att accelerera upp bilen bör implementeras i parallellhybriden. Skulle drivlinan konstrueras måste antingen en koppling eller ett frihjul användas mellan Hondans växellåda och hjulaxeln. En koppling behövs även mellan huvudaxeln och hjulet om bilen skall kunna stå stilla och ladda kondensatorn som reglerna kräver. Kopplingen mellan Honda-motorns växel och hjulaxeln har här utelämnats pga. regleringsproblem. Att motorn inte är frikopplad när den inte arbetar har för beräkningarna ingen betydelse, den påverkar inte drivaxeln annat än med sitt tröghetsmoment. I verkligheten är kopplingen nödvändig för att motorn ska kunna stå still när elmotorn driver bilen. Det bör utredas djupare vilken verkningsgrad Honda-motorn och HCCI motorn har, alternativt titta efter andra motorer med en deklarerad hög verkningsgrad då denna har enormt hög inverkan på förbrukningen. Då rullningsmotståndet kraftigt påverkar förbrukningen bör det utföras grundliga tester som visar hur rullfriktionskoefficienten varierar vid förändring av vikt i fordonet. Det bör även vara ett huvudmål i en framtida konstruktion av Aurora att minimera vikten. 34
39 6 REFERENSER Forsman, Karlsson och Nisserud, Förstudie Parallellhybrid växel till Aurora, Forsman, Karlsson och Nisserud, Sammanställningar från tidigare års tävlingar i Urban Concept 2008 Forsman, Karlsson och Nisserud, Funktions beskrivning Parallellhybridväxel till Aurora, Teknikensvärld, Provkörning av Honda Civic, hämtad Ny Teknik, Baldos sopade banan i snålbilarnas maraton, hämtad Auto Motor & Sport Nya Toyota Prius: starkare, snålare, rymligare, hämtad Shell 2009 Official Rules and Regulations hämtad Shell Shell Eco-Marathon Europé 2009, map of circuit hämtad Shell For the participants, The Eurospeedway circuit in pdf hämtad Nordela Datablad för elmotor GNM hämtad Simulink version 2008a (7.6.0), simulerings program, The Matworks group, 35
40 36
41 BILAGA A: Parallellhybridens styrsystem function [Egas,Fgas] = fcn(v, a,uc) % This block supports the Embedded MATLAB subset. % See the help menu for details. Ucswitch=47;%tröskelvärde under vilket generatordriften startas. Gen=-5;%laddström vid generatordrift vmarch=28; %STÅ STILL if v<vmarch&&a==0&&uc<ucswitch Egas=0; Fgas=0; elseif v<vmarch&&a==0&&uc>ucswitch Egas=0; Fgas=0; %ACC elseif v<25&&a>0&&uc<ucswitch Egas=20; Fgas=0; elseif v<vmarch&&a>0&&uc<ucswitch Egas=10; Fgas=1; elseif v<vmarch&&a>0&&uc>ucswitch Egas=20; Fgas=0; %KONSTANT elseif v>=vmarch&&a==0&&uc<=ucswitch Egas=Gen;%GENERATORDRIFT Fgas=1; elseif v>=vmarch&&a==0&&uc>ucswitch Egas=0;%Ingen generatordrift Fgas=1; elseif v>=vmarch&&a>0&&uc>ucswitch Egas=0;%Ingen generatordrift Fgas=1; elseif v>=vmarch&&a>0&&uc<ucswitch Egas=Gen;% Fgas=1; %RETARDATION elseif a<0&&v>=10 Egas=-8; Fgas=0; %OCH NÅGON GÅNG, HELST ALDRIG----- else Egas=0; Fgas=0; End 37
42 38
43 BILAGA B: Exempel på simuleringsprotokoll Simuleringsprotokoll Seriehybridkörning Hela loppet 3 stopp. Sträcka: m Marchhastighet : 26.8 km/h (mätt på första platta raksträckan) Tid: 3125 sek Uppskattad racetid Förbrukad energi: 52 min 5 sek 3,3169e6 joule Kondensatorspänning start 40 volt Tröskel Bränsleförbrukning: Mål 42,1 volt 21 volt 214,3km/L på mållinjen. se graf 3 för konvergens och spridning. Shells regler säger att energiinnehållet för 95oktanig bensin är 32.01Mj/liter med densiteten vid 15grader Kommentarer Förändrad verkningsgrad till 20% med samma utväxling 11 mellan elmotor och hjul. Däremot fördubblat rullmotstånd till 0,01. Missade kondensator laddningen något, kan förändra startvärdet för bättre timing. 39
44 %PARAMETERFIL %PARAMETERFIL % Parametrar för omgivningen----- densitet=1.2; %Luftens densitet g=9.82; %Tyngdacc banan= ; %Banans längd (1 varv) %----Bildata hjradie=0.28; massab=200; luftmarea=0.875; %Hjulets ytterradie %Bilens massa med förare %Luftmotståndsarea % elmotorparametrar Kt=0.0684;%motorns momentkonstant [Nm/A] Ke= ;%0.0281; %motorns spänningskonstant[vs/rad] Ra=0.026; %motorns ankarresistans [ohm] %kondensatorparametrar Uc0=40;%begynnelsevärde Ucswitch=21;%tröskelvärde under vilket generatordriften startas. C=110;%kapacitans Imax=20;%obligatoriska säkringens värde esr=0.0095;% Ekvivalent serieresistans % Motordata Meffekt=810; %Maxeffekt rpmmeffekt=7500; %Max varvtal vid Maxeffekt maxrpm=8000; %Max varvtal %verkningsgrad om konstant verkningsgrad=0.20; ettminusverkgrad=1-verkningsgrad; % "förlust"-parametrar Cd=0.3; Cr=0.01; %Luftmotståndskoeff. %Rullmotståndskoeff. %körning v=32; a=[ ; v v 0 0 v v 0 0 v v 0 0 v v]; a=a'; Grafer 40
45 41
ryckigt Kör 28 PORSCHEMAG
 PorscheMag17_28-33_Jarlmark.qxp:Layout1 11-03-03 Kör 12.59 Sida 28 ryckigt Vad går all bensin egentligen åt till när vi kör? Dagligen tar ingenjörerna hos Porsche väldigt avancerade beräkningar till hjälp
PorscheMag17_28-33_Jarlmark.qxp:Layout1 11-03-03 Kör 12.59 Sida 28 ryckigt Vad går all bensin egentligen åt till när vi kör? Dagligen tar ingenjörerna hos Porsche väldigt avancerade beräkningar till hjälp
Systemkonstruktion Z3
 Systemkonstruktion Z3 (Kurs nr: SSY 046) Tentamen 22 oktober 2010 Lösningsförslag 1 Skriv en kravspecifikation för konstruktionen! Kravspecifikationen ska innehålla information kring fordonets prestanda
Systemkonstruktion Z3 (Kurs nr: SSY 046) Tentamen 22 oktober 2010 Lösningsförslag 1 Skriv en kravspecifikation för konstruktionen! Kravspecifikationen ska innehålla information kring fordonets prestanda
Ett laddningsbart batteri, Duracell NiMH size AA, är märkt 2050 mah samt 1,2V.
 H:1 Ett laddningsbart batteri, Duracell NiMH size AA, är märkt 2050 mah samt 1,2V. Med scopemeter och några yttre motstånd mäts ett antal punkter (I, U). Mätningarna ritas in i ett UI-diagram och en ekvivalent
H:1 Ett laddningsbart batteri, Duracell NiMH size AA, är märkt 2050 mah samt 1,2V. Med scopemeter och några yttre motstånd mäts ett antal punkter (I, U). Mätningarna ritas in i ett UI-diagram och en ekvivalent
Tillståndsmaskin (Se separat skrift Tillståndsdiagram som hör till föreläsningen) insignal = övergångsvillkor, tillstånd, utsignal Switch Case
 insignal = övergångsvillkor, tillstånd, utsignal Switch Case") Elektroteknik MF1016 föreläsning 8, MF1017 föreläsning 6 Tillståndsmaskin (Se separat skrift Tillståndsdiagram som hör till föreläsningen) insignal = övergångsvillkor, tillstånd, utsignal Switch Case Hållbar
Elektroteknik MF1016 föreläsning 8, MF1017 föreläsning 6 Tillståndsmaskin (Se separat skrift Tillståndsdiagram som hör till föreläsningen) insignal = övergångsvillkor, tillstånd, utsignal Switch Case Hållbar
Automation Laboration: Reglering av DC-servo
 Automation Laboration: Reglering av DC-servo Inledning I denna laboration undersöks reglering dels av varvtalet och dels av vinkelläget hos ett likströmsservo. Mätsignal för varvtal är utsignalen från
Automation Laboration: Reglering av DC-servo Inledning I denna laboration undersöks reglering dels av varvtalet och dels av vinkelläget hos ett likströmsservo. Mätsignal för varvtal är utsignalen från
5. Kretsmodell för likströmsmaskinen som även inkluderar lindningen resistans RA.
 Föreläsning 1 Likströmsmaskinen och likström (test). 1. Modell och verklighet. 2. Moment och ström (M&IA). Momentkonstanten K2Ф. 3. Varvtal och inducerad spänning (ω&ua). Spänningskonstanten K2Ф. 4. Momentkonstant
Föreläsning 1 Likströmsmaskinen och likström (test). 1. Modell och verklighet. 2. Moment och ström (M&IA). Momentkonstanten K2Ф. 3. Varvtal och inducerad spänning (ω&ua). Spänningskonstanten K2Ф. 4. Momentkonstant
Systemkonstruktion Z2
 Systemkonstruktion Z2 (Kurs nr: SSY 045) Tentamen 23 Augusti 2006 Tid: 8:30-12:30, Lokal: V-huset. Lärare: Stefan Pettersson, tel 772 5146, 0739907981 Tentamenssalarna besöks ca kl. 9.30 och 11.30. Tentamen
Systemkonstruktion Z2 (Kurs nr: SSY 045) Tentamen 23 Augusti 2006 Tid: 8:30-12:30, Lokal: V-huset. Lärare: Stefan Pettersson, tel 772 5146, 0739907981 Tentamenssalarna besöks ca kl. 9.30 och 11.30. Tentamen
Elektroteknik MF1016 föreläsning 8, MF1017 föreläsning 6
 Elektroteknik MF1016 föreläsning 8, MF1017 föreläsning 6 Tillståndsmaskin (Tillståndsdiagram) insignal = övergångsvillkor, tillstånd, utsignal Switch Case Hållbar utveckling Framdrivning av elbilar och
Elektroteknik MF1016 föreläsning 8, MF1017 föreläsning 6 Tillståndsmaskin (Tillståndsdiagram) insignal = övergångsvillkor, tillstånd, utsignal Switch Case Hållbar utveckling Framdrivning av elbilar och
Vätebränsle. Namn: Rasmus Rynell. Klass: TE14A. Datum: 2015-03-09
 Vätebränsle Namn: Rasmus Rynell Klass: TE14A Datum: 2015-03-09 Abstract This report is about Hydrogen as the future fuel. I chose this topic because I think that it s really interesting to look in to the
Vätebränsle Namn: Rasmus Rynell Klass: TE14A Datum: 2015-03-09 Abstract This report is about Hydrogen as the future fuel. I chose this topic because I think that it s really interesting to look in to the
Vilka är vi. Varför Arvika
 Vilka är vi. Varför Arvika Vad är YH-utbildning Yrkeshögskoleutbildning är sedan 2009 en ny eftergymnasial utbildningsform med stark arbetslivsanknytning. Utbildningarna är utformade utifrån arbetslivets
Vilka är vi. Varför Arvika Vad är YH-utbildning Yrkeshögskoleutbildning är sedan 2009 en ny eftergymnasial utbildningsform med stark arbetslivsanknytning. Utbildningarna är utformade utifrån arbetslivets
Framtidens miljöbilar
 Framtidens miljöbilar Namn: William Skarin Datum: 2015-03-02 Klass: TE14B Gruppmedlemmar: Christian, Mikael, Linnea och Simon. Handledare: David, Björn och Jimmy. Abstract The aim of this study is to describe
Framtidens miljöbilar Namn: William Skarin Datum: 2015-03-02 Klass: TE14B Gruppmedlemmar: Christian, Mikael, Linnea och Simon. Handledare: David, Björn och Jimmy. Abstract The aim of this study is to describe
TENTAMENSUPPGIFTER I ELEKTROTEKNIK MED SVAR
 ELEKTROTEKNIK Inlämningstid Kl: 1 MSKINKONSTRUKTION KTH TENTMENSUPPGIFTER I ELEKTROTEKNIK MED SVR Elektroteknik MF1017 013 10 31 Kl: 14:00 17:00 Du får, som hjälpmedel, använda räknedosa, kursens lärobok
ELEKTROTEKNIK Inlämningstid Kl: 1 MSKINKONSTRUKTION KTH TENTMENSUPPGIFTER I ELEKTROTEKNIK MED SVR Elektroteknik MF1017 013 10 31 Kl: 14:00 17:00 Du får, som hjälpmedel, använda räknedosa, kursens lärobok
WALLENBERGS FYSIKPRIS 2014
 WALLENBERGS FYSIKPRIS 2014 Tävlingsuppgifter (Kvalificeringstävlingen) Riv loss detta blad och häfta ihop det med de lösta tävlingsuppgifterna. Resten av detta uppgiftshäfte får du behålla. Fyll i uppgifterna
WALLENBERGS FYSIKPRIS 2014 Tävlingsuppgifter (Kvalificeringstävlingen) Riv loss detta blad och häfta ihop det med de lösta tävlingsuppgifterna. Resten av detta uppgiftshäfte får du behålla. Fyll i uppgifterna
10 Elmotordrift av bilar
 MMK, KTH 10. Elmotordrift av bilar Uppgifter sid 10-1 10 Elmotordrift av bilar U 10 :1 Ett laddningsbart batteri, Duracell NiMH size AA, är märkt 050 mah samt 1,V. Med scopemeter och några yttre motstånd
MMK, KTH 10. Elmotordrift av bilar Uppgifter sid 10-1 10 Elmotordrift av bilar U 10 :1 Ett laddningsbart batteri, Duracell NiMH size AA, är märkt 050 mah samt 1,V. Med scopemeter och några yttre motstånd
Extrauppgifter Elektricitet
 Extrauppgifter Elektricitet 701 a) Strömmen genom en ledning är 2,50 A Hur många elektroner passerar varje sekund genom ett tvärsnitt av ledningen? b) I en blixt kan strömmen vara 20 ka och pågå i 0,90
Extrauppgifter Elektricitet 701 a) Strömmen genom en ledning är 2,50 A Hur många elektroner passerar varje sekund genom ett tvärsnitt av ledningen? b) I en blixt kan strömmen vara 20 ka och pågå i 0,90
WORKSHOP: EFFEKTIVITET OCH ENERGIOMVANDLING
 WORKSHOP: EFFEKTIVITET OCH ENERGIOMVANDLING Energin i vinden som blåser, vattnet som strömmar, eller i solens strålar, måste omvandlas till en mera användbar form innan vi kan använda den. Tyvärr finns
WORKSHOP: EFFEKTIVITET OCH ENERGIOMVANDLING Energin i vinden som blåser, vattnet som strömmar, eller i solens strålar, måste omvandlas till en mera användbar form innan vi kan använda den. Tyvärr finns
Eco driving, på svenska sparsam körning, är en körteknik som kan ge 10-20% lägre bränsleförbrukning.
 Sparsam körning Eco driving, på svenska sparsam körning, är en körteknik som kan ge 10-20% lägre bränsleförbrukning. men det finns flera sätt att spara bränsle och miljö! Bilens egenskaper Bilen har en
Sparsam körning Eco driving, på svenska sparsam körning, är en körteknik som kan ge 10-20% lägre bränsleförbrukning. men det finns flera sätt att spara bränsle och miljö! Bilens egenskaper Bilen har en
Rapport elbilar Framtidens fordon
 Teknikprogrammet Klass TE14. Rapport elbilar Framtidens fordon Namn: Joel Evertsson Datum: 2015-03-09 Abstract This report is about electric car. We have worked with future vehicles and with this report
Teknikprogrammet Klass TE14. Rapport elbilar Framtidens fordon Namn: Joel Evertsson Datum: 2015-03-09 Abstract This report is about electric car. We have worked with future vehicles and with this report
Systemskiss. Redaktör: Anders Toverland Version 1.0. Status. LiTH Fordonssimulator. Granskad Godkänd. TSRT71 Anders Toverland
 Systemskiss Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET Grupp 1, 2005/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Anders Wikström Kvalitetsansvarig
Systemskiss Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET Grupp 1, 2005/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Anders Wikström Kvalitetsansvarig
Volvo FE Hybrid. Förstavalet inom miljöanpassad distribution och renhållning
 Volvo FE Hybrid Förstavalet inom miljöanpassad distribution och renhållning En ren och lönsam framtidslösning Volvo Lastvagnar har över tjugo års erfarenhet av hybridteknologi. Redan 1985 presenterades
Volvo FE Hybrid Förstavalet inom miljöanpassad distribution och renhållning En ren och lönsam framtidslösning Volvo Lastvagnar har över tjugo års erfarenhet av hybridteknologi. Redan 1985 presenterades
Nytänkande inom miljöbilsområdet MARKUS LUNDBORG JOEL PERSSON
 Nytänkande inom miljöbilsområdet MARKUS LUNDBORG JOEL PERSSON Examensarbete Stockholm, Sverige 2011 Nytänkande inom miljöbilsområdet Markus Lundborg Joel Persson Examensarbete MMKB 2011:56 MKNB 039 KTH
Nytänkande inom miljöbilsområdet MARKUS LUNDBORG JOEL PERSSON Examensarbete Stockholm, Sverige 2011 Nytänkande inom miljöbilsområdet Markus Lundborg Joel Persson Examensarbete MMKB 2011:56 MKNB 039 KTH
BMW MOTORTEKNOLOGI. DIESEL
 BMW MOTORTEKNOLOGI. DIESEL ATT VÄLJA RÄTT MOTOR. DIESEL. BENSIN. HYBRID. ELEKTRISK. Utvecklingen av motorer har tagit enorma steg de senaste åren. BMWs diesel-, bensin- och plug-in hybridmotorer är inget
BMW MOTORTEKNOLOGI. DIESEL ATT VÄLJA RÄTT MOTOR. DIESEL. BENSIN. HYBRID. ELEKTRISK. Utvecklingen av motorer har tagit enorma steg de senaste åren. BMWs diesel-, bensin- och plug-in hybridmotorer är inget
Kapitel 4 Arbete, energi och effekt
 Arbete När en kraft F verkar på ett föremål och föremålet flyttar sig sträckan s i kraftens riktning säger vi att kraften utför ett arbete på föremålet. W = F s Enheten blir W = F s = Nm = J (joule) (enheten
Arbete När en kraft F verkar på ett föremål och föremålet flyttar sig sträckan s i kraftens riktning säger vi att kraften utför ett arbete på föremålet. W = F s Enheten blir W = F s = Nm = J (joule) (enheten
Introduktion till Elektriska Drivsystem
 Introduktion till Elektriska Drivsystem Elektriska drivsystem finns tillgängliga för hela skalan av effekter. täcker ett mycket brett spektrum av hastigheter och moment. kan anpassas till nästan godtyckliga
Introduktion till Elektriska Drivsystem Elektriska drivsystem finns tillgängliga för hela skalan av effekter. täcker ett mycket brett spektrum av hastigheter och moment. kan anpassas till nästan godtyckliga
Laboration i Maskinelement
 Laboration i Maskinelement Bilväxellådan Namn: Personnummer: Assistents signatur: Datum: Inledning I den här laborationen ska vi gå lite djupare i ämnet maskinelement och ge oss in på något som förmodligen
Laboration i Maskinelement Bilväxellådan Namn: Personnummer: Assistents signatur: Datum: Inledning I den här laborationen ska vi gå lite djupare i ämnet maskinelement och ge oss in på något som förmodligen
Upp gifter. 1. Vilken hastighet måste en boll minst ha för att kunna nå 14,5 m upp i luften?
 1. Vilken hastighet måste en boll minst ha för att kunna nå 14,5 m upp i luften? 2. En bil som väger 143 kg har hastigheten 9 km/h. Vilken rörelseenergi har bilen? 3. Det högsta vattenfallet i världen
1. Vilken hastighet måste en boll minst ha för att kunna nå 14,5 m upp i luften? 2. En bil som väger 143 kg har hastigheten 9 km/h. Vilken rörelseenergi har bilen? 3. Det högsta vattenfallet i världen
Självkörande bilar. Alvin Karlsson TE14A 9/3-2015
 Självkörande bilar Alvin Karlsson TE14A 9/3-2015 Abstract This report is about driverless cars and if they would make the traffic safer in the future. Google is currently working on their driverless car
Självkörande bilar Alvin Karlsson TE14A 9/3-2015 Abstract This report is about driverless cars and if they would make the traffic safer in the future. Google is currently working on their driverless car
From juni 2012 tankar vi Preems Evolution.2-diesel, med 30% förnybar råvara.
 Sex bilar med olika motorstyrka och utväxling, i en jakt för att hitta den för uppdraget optimala dragbilen. För enkelhetens skull lackerade i olika färger. From juni 2012 tankar vi Preems Evolution.2-diesel,
Sex bilar med olika motorstyrka och utväxling, i en jakt för att hitta den för uppdraget optimala dragbilen. För enkelhetens skull lackerade i olika färger. From juni 2012 tankar vi Preems Evolution.2-diesel,
Försättsblad till skriftlig tentamen vid Linköpings Universitet
 Försättsblad till skriftlig tentamen vid Linköpings Universitet Datum för tentamen 2012-05-21 Sal KÅRA Tid 8-12 Kurskod TSFS04 Provkod TEN1 Kursnamn Elektriska drivsystem Institution ISY Antal uppgifter
Försättsblad till skriftlig tentamen vid Linköpings Universitet Datum för tentamen 2012-05-21 Sal KÅRA Tid 8-12 Kurskod TSFS04 Provkod TEN1 Kursnamn Elektriska drivsystem Institution ISY Antal uppgifter
Vid inträdesprovet till agroteknologi får man använda formelsamlingen som publicerats på nätet.
 Vid inträdesprovet till agroteknologi får man använda formelsamlingen som publicerats på nätet. Här är a)-delens mångvalsfrågor. I inträdesprovet ingår antingen samma frågor eller liknande frågor. Bekanta
Vid inträdesprovet till agroteknologi får man använda formelsamlingen som publicerats på nätet. Här är a)-delens mångvalsfrågor. I inträdesprovet ingår antingen samma frågor eller liknande frågor. Bekanta
Instruktionsbok Envimove
 Instruktionsbok Envimove Grattis till ditt köp av en kvalitetsprodukt från Cykelimport!.. C Y K E L I M P O R T Cykelimport, Norra Storgatan 110, 573 34 Tranås Plusgiro: 519972-4, Bankgiro 430-2261 Telefon:
Instruktionsbok Envimove Grattis till ditt köp av en kvalitetsprodukt från Cykelimport!.. C Y K E L I M P O R T Cykelimport, Norra Storgatan 110, 573 34 Tranås Plusgiro: 519972-4, Bankgiro 430-2261 Telefon:
Loh Electronics AB, Box 22067, Örebro Besöksadress: Karlsdalsallén 53 Örebro Tel
 Varvtalsregulator H-Version Beskrivning Varvtalsregulator version H är avsedd för A-traktorer där hastigheten begränsas enligt de regler som gäller för A-traktorer. Avsikten med denna modell är att kunna
Varvtalsregulator H-Version Beskrivning Varvtalsregulator version H är avsedd för A-traktorer där hastigheten begränsas enligt de regler som gäller för A-traktorer. Avsikten med denna modell är att kunna
Arbete med hybridfordon
 Allmänt om hybridfordon och hybridsystem Allmänt om hybridfordon och hybridsystem Scanias hybridfordon är parallellhybrider och utgörs av en förbränningsmotor och en elmotor. I en parallellhybrid kan fordonet
Allmänt om hybridfordon och hybridsystem Allmänt om hybridfordon och hybridsystem Scanias hybridfordon är parallellhybrider och utgörs av en förbränningsmotor och en elmotor. I en parallellhybrid kan fordonet
Solowheel. Namn: Jesper Edqvist. Klass: TE14A. Datum: 2015-03-09
 Solowheel Namn: Jesper Edqvist Klass: TE14A Datum: 2015-03-09 Abstract We got an assignment that we should do an essay about something we wanted to dig deeper into. In my case I dug deeper into what a
Solowheel Namn: Jesper Edqvist Klass: TE14A Datum: 2015-03-09 Abstract We got an assignment that we should do an essay about something we wanted to dig deeper into. In my case I dug deeper into what a
Volvo Energieffektivt fordon Volvo Energy efficient Vehicle, VEV
 Volvo Energieffektivt fordon Volvo Energy efficient Vehicle, VEV Energimyndighetens konferens om energirelaterad fordonsforskning Projektinformation Projekttid 2011-2016 Volvo Technology i samarbete med
Volvo Energieffektivt fordon Volvo Energy efficient Vehicle, VEV Energimyndighetens konferens om energirelaterad fordonsforskning Projektinformation Projekttid 2011-2016 Volvo Technology i samarbete med
27,8 19,4 3,2 = = 1500 2,63 = 3945 N = + 1 2. = 27,8 3,2 1 2,63 3,2 = 75,49 m 2
 Lina Rogström linro@ifm.liu.se Lösningar till tentamen 150407, Fysik 1 för Basåret, BFL101 Del A A1. (2p) Eva kör en bil med massan 1500 kg med den konstanta hastigheten 100 km/h. Längre fram på vägen
Lina Rogström linro@ifm.liu.se Lösningar till tentamen 150407, Fysik 1 för Basåret, BFL101 Del A A1. (2p) Eva kör en bil med massan 1500 kg med den konstanta hastigheten 100 km/h. Längre fram på vägen
Införa begreppen ström, strömtäthet och resistans Ohms lag Tillämpningar på enkla kretsar Energi och effekt i kretsar
 Kapitel: 25 Ström, motstånd och emf (Nu lämnar vi elektrostatiken) Visa under vilka villkor det kan finnas E-fält i ledare Införa begreppet emf (electromotoric force) Beskriva laddningars rörelse i ledare
Kapitel: 25 Ström, motstånd och emf (Nu lämnar vi elektrostatiken) Visa under vilka villkor det kan finnas E-fält i ledare Införa begreppet emf (electromotoric force) Beskriva laddningars rörelse i ledare
Volvo Energieffektivt fordon Fas 5 Energimyndighetens konferens Energirelaterad fordonsforskning Åke Othzén
 Volvo Energieffektivt fordon Fas 5 Energimyndighetens konferens Energirelaterad fordonsforskning 2017 Åke Othzén 2017-10-05 Projektinformation Projekttid 2011-2017 Fas 5: 2016-02-03-2017-11-01 Volvo Technology
Volvo Energieffektivt fordon Fas 5 Energimyndighetens konferens Energirelaterad fordonsforskning 2017 Åke Othzén 2017-10-05 Projektinformation Projekttid 2011-2017 Fas 5: 2016-02-03-2017-11-01 Volvo Technology
Laborationsrapport. Kurs Elkraftteknik. Lab nr 3 vers 3.0. Laborationens namn Likströmsmotorn. Kommentarer. Utförd den. Godkänd den.
 Laborationsrapport Kurs Elkraftteknik Lab nr 3 vers 3.0 Laborationens namn Likströmsmotorn Namn Kommentarer Utförd den Godkänd den Sign 1 Allmänt Uppgiften på laborationen är att bestämma karakteristiska
Laborationsrapport Kurs Elkraftteknik Lab nr 3 vers 3.0 Laborationens namn Likströmsmotorn Namn Kommentarer Utförd den Godkänd den Sign 1 Allmänt Uppgiften på laborationen är att bestämma karakteristiska
WALLENBERGS FYSIKPRIS
 WALLENBERGS FYSIKPRIS KVALIFICERINGSTÄVLING 23 januari 2014 SVENSKA FYSIKERSAMFUNDET LÖSNINGSFÖRSLAG 1. (a) När bilens fart är 50 km/h är rörelseenergin W k ( ) 2 1,5 10 3 50 3,6 2 J 145 10 3 J. Om verkningsgraden
WALLENBERGS FYSIKPRIS KVALIFICERINGSTÄVLING 23 januari 2014 SVENSKA FYSIKERSAMFUNDET LÖSNINGSFÖRSLAG 1. (a) När bilens fart är 50 km/h är rörelseenergin W k ( ) 2 1,5 10 3 50 3,6 2 J 145 10 3 J. Om verkningsgraden
Förslag på examensarbete
 Förslag på examensarbete 2011 Allmän information - exjobb på Aros utvecklar och producerar kundanpassad industriell elektronik. Motorstyrningar, sensorer och fältbussteknologi är våra specialområden. Inom
Förslag på examensarbete 2011 Allmän information - exjobb på Aros utvecklar och producerar kundanpassad industriell elektronik. Motorstyrningar, sensorer och fältbussteknologi är våra specialområden. Inom
Linköpings Universitet. Matematiska institutionen/optimeringslära 140915 Kaj Holmberg IT Termin 5. IT Termin 5 2014. Vinjetter
 Linköpings Universitet Vinjetter Matematiska institutionen/optimeringslära 0915 Kaj Holmberg IT Termin 5 IT Termin 5 20 Vinjetter Inledning Miljöaspekter blir allt viktigare att ta med i beräkningen vid
Linköpings Universitet Vinjetter Matematiska institutionen/optimeringslära 0915 Kaj Holmberg IT Termin 5 IT Termin 5 20 Vinjetter Inledning Miljöaspekter blir allt viktigare att ta med i beräkningen vid
TIAP-metoden för statusbestäming
 TIAP-metoden för statusbestäming Höjer lönsamheten på din anläggning Anna Pernestål, anna.pernestal@tiap.se, Life Cycle Profit och TIAP-metoden TIAP-metoden bygger på helhetssyn av drift och underhåll
TIAP-metoden för statusbestäming Höjer lönsamheten på din anläggning Anna Pernestål, anna.pernestal@tiap.se, Life Cycle Profit och TIAP-metoden TIAP-metoden bygger på helhetssyn av drift och underhåll
TENTAMENSUPPGIFTER I ELEKTROTEKNIK MED SVAR
 EEKTOTEKK nlämningstid Kl: MASKKOSTKTO KTH TETAMESPPGFTE EEKTOTEKK MED SVA Elektroteknik MF06 0 0 8 kl: 9:00 3.00 Du får lämna salen tidigast timme efter tentamensstart. Du får, som hjälpmedel, använda
EEKTOTEKK nlämningstid Kl: MASKKOSTKTO KTH TETAMESPPGFTE EEKTOTEKK MED SVA Elektroteknik MF06 0 0 8 kl: 9:00 3.00 Du får lämna salen tidigast timme efter tentamensstart. Du får, som hjälpmedel, använda
TENTAMEN Elmaskiner 2, 7,5 p
 Umeå Universitet Tillämpad Fysik och Elektronik Per Hallberg Nils Lundgren Johan Pålsson Johan Haake TENTAMEN Elmaskiner 2, 7,5 p Onsdag 9 januari 2014 Kl 9.00-15.00 Tillåtna hjälpmedel: Miniräknare. Kurslitteratur
Umeå Universitet Tillämpad Fysik och Elektronik Per Hallberg Nils Lundgren Johan Pålsson Johan Haake TENTAMEN Elmaskiner 2, 7,5 p Onsdag 9 januari 2014 Kl 9.00-15.00 Tillåtna hjälpmedel: Miniräknare. Kurslitteratur
Välkomna till Gear Technology Center. 1
 Välkomna till Gear Technology Center www.geartechnologycentre.se 1 Vilka är ni och vad förväntar ni er av kursen? www.geartechnologycentre.se 2 Redan de gamla grekerna www.geartechnologycentre.se 3 Redan
Välkomna till Gear Technology Center www.geartechnologycentre.se 1 Vilka är ni och vad förväntar ni er av kursen? www.geartechnologycentre.se 2 Redan de gamla grekerna www.geartechnologycentre.se 3 Redan
Instuderingsfrågor Arbete och Energi
 Instuderingsfrågor Arbete och Energi 1. Skriv ett samband (en formel) där kraft, arbete och väg ingår. 2. Vad menas med friktionskraft? 3. Hur stort arbete behövs för att lyfta en kartong som väger 5 kg
Instuderingsfrågor Arbete och Energi 1. Skriv ett samband (en formel) där kraft, arbete och väg ingår. 2. Vad menas med friktionskraft? 3. Hur stort arbete behövs för att lyfta en kartong som väger 5 kg
BILENS ELFÖRSÖRJNING. DEL 2: GENERATORN
 BILENS ELFÖRSÖRJNING. DEL 2: GENERATORN Att elförsörjningen fungerar är viktigt för att bilen ska fungera bra. Förra avsnittet handlade om batteriet, och nu ska vi fortsätta med generatorn. Precis som
BILENS ELFÖRSÖRJNING. DEL 2: GENERATORN Att elförsörjningen fungerar är viktigt för att bilen ska fungera bra. Förra avsnittet handlade om batteriet, och nu ska vi fortsätta med generatorn. Precis som
Lösningar Kap 7 Elektrisk energi, spänning och ström. Andreas Josefsson. Tullängsskolan Örebro
 Lösningar Kap 7 Elektrisk energi, spänning och ström Andreas Josefsson Tullängsskolan Örebro Lösningar Fysik 1 Heureka: kap 7 7.1) Om kulan kan "falla" från A till B minskar dess potentiella elektriska
Lösningar Kap 7 Elektrisk energi, spänning och ström Andreas Josefsson Tullängsskolan Örebro Lösningar Fysik 1 Heureka: kap 7 7.1) Om kulan kan "falla" från A till B minskar dess potentiella elektriska
FRÅGOR OCH SVAR OM PRIUS LADDHYBRID
 FRÅGOR OCH SVAR OM PRIUS LADDHYBRID INTRODUKTION 1. Hur fungerar Prius Laddhybrid? Prius Laddhybrid tillhör gruppen Plug-in Hybrid Electric Vehicles (PHEV) och är en laddbar parallellhybrid. I en parallellhybrid
FRÅGOR OCH SVAR OM PRIUS LADDHYBRID INTRODUKTION 1. Hur fungerar Prius Laddhybrid? Prius Laddhybrid tillhör gruppen Plug-in Hybrid Electric Vehicles (PHEV) och är en laddbar parallellhybrid. I en parallellhybrid
Elektroteknik MF1035 föreläsning 5
 Tillståndsmaskin (Tillståndsdiagram) insignal = övergångsvillkor, tillstånd, utsignal Switch Case Hållbar utveckling (För och nackdelar med elbilar) Framdrivning av elbilar och hybridbilar Seriehybrid
Tillståndsmaskin (Tillståndsdiagram) insignal = övergångsvillkor, tillstånd, utsignal Switch Case Hållbar utveckling (För och nackdelar med elbilar) Framdrivning av elbilar och hybridbilar Seriehybrid
Försättsblad till skriftlig tentamen vid Linköpings Universitet
 Försättsblad till skriftlig tentamen vid Linköpings Universitet Datum för tentamen 2012-08-17 Sal TER3 Tid 14-18 Kurskod TSFS04 Provkod TEN1 Kursnamn Elektriska drivsystem Institution ISY Antal uppgifter
Försättsblad till skriftlig tentamen vid Linköpings Universitet Datum för tentamen 2012-08-17 Sal TER3 Tid 14-18 Kurskod TSFS04 Provkod TEN1 Kursnamn Elektriska drivsystem Institution ISY Antal uppgifter
Analys och utvärdering av elektromekanisk drivlina för hybridfordon
 Analys och utvärdering av elektromekanisk drivlina för hybridfordon Analysis and Evaluation of Electromechanical Power Train for Hybrid Vehicles Jacob Wedin och Hampus Neuenfeldt Fakulteten för hälsa,
Analys och utvärdering av elektromekanisk drivlina för hybridfordon Analysis and Evaluation of Electromechanical Power Train for Hybrid Vehicles Jacob Wedin och Hampus Neuenfeldt Fakulteten för hälsa,
1.1 Mätning av permittiviteten i vakuum med en skivkondensator
 PERMITTIVITET Inledning Låt oss betrakta en skivkondensator som består av två parallella metalskivor. Då en laddad partikel förflyttas från den ena till den andra skivan får skivorna laddningen +Q och
PERMITTIVITET Inledning Låt oss betrakta en skivkondensator som består av två parallella metalskivor. Då en laddad partikel förflyttas från den ena till den andra skivan får skivorna laddningen +Q och
Grundläggande energibegrepp
 Grundläggande energibegrepp 1 Behov 2 Tillförsel 3 Distribution 4 Vad är energi? Försök att göra en illustration av Energi. Hur skulle den se ut? Kanske solen eller. 5 Vad är energi? Energi används som
Grundläggande energibegrepp 1 Behov 2 Tillförsel 3 Distribution 4 Vad är energi? Försök att göra en illustration av Energi. Hur skulle den se ut? Kanske solen eller. 5 Vad är energi? Energi används som
Tillåtna hjälpmedel: Physics Handbook, Beta, kalkylator i fickformat, samt en egenhändigt skriven A4- sida med valfritt innehåll.
 Tentamen i Mekanik för F, del B Tisdagen 17 augusti 2004, 8.45-12.45, V-huset Examinator: Martin Cederwall Jour: Ling Bao, tel. 7723184 Tillåtna hjälpmedel: Physics Handbook, Beta, kalkylator i fickformat,
Tentamen i Mekanik för F, del B Tisdagen 17 augusti 2004, 8.45-12.45, V-huset Examinator: Martin Cederwall Jour: Ling Bao, tel. 7723184 Tillåtna hjälpmedel: Physics Handbook, Beta, kalkylator i fickformat,
Styrteknik: Grundläggande logiska funktioner D2:1
 Styrteknik: Grundläggande logiska funktioner D2:1 Digitala kursmoment D1 Boolesk algebra D2 Grundläggande logiska funktioner D3 Binära tal, talsystem och koder Styrteknik: Grundläggande logiska funktioner
Styrteknik: Grundläggande logiska funktioner D2:1 Digitala kursmoment D1 Boolesk algebra D2 Grundläggande logiska funktioner D3 Binära tal, talsystem och koder Styrteknik: Grundläggande logiska funktioner
EFFEKTIVARE DRIFT med växellösa motorer
 EFFEKTIVARE DRIFT med växellösa motorer För 1- och 3-fas nät Avbrottsfri drift vid spänningsbortfall, 200-400 cykler Tyst drift Hög verkningsgrad Stabil, mjuk rotation Utmärkt åkkomfort Varför en växellös
EFFEKTIVARE DRIFT med växellösa motorer För 1- och 3-fas nät Avbrottsfri drift vid spänningsbortfall, 200-400 cykler Tyst drift Hög verkningsgrad Stabil, mjuk rotation Utmärkt åkkomfort Varför en växellös
Slutrapport av projektet moment och varvtalsstyrning av vindkraftverk
 Slutrapport av projektet moment och varvtalsstyrning av vindkraftverk Torbjörn Thiringer Juli 2005 STEM projektnummer: 21450-1 STEM diarienummer: 5210-2003-03864 Institutionen för Energi och Miljö, Chalmers
Slutrapport av projektet moment och varvtalsstyrning av vindkraftverk Torbjörn Thiringer Juli 2005 STEM projektnummer: 21450-1 STEM diarienummer: 5210-2003-03864 Institutionen för Energi och Miljö, Chalmers
teknik inte till sin rätt utan blir bara ett tomt ord på bakluckan och i reklambroschyren.
 teknik TEXT: JONAS JARLMARK, BILD PORSCHE AG Hybridtekniken tar snabba kliv framåt när Porsche skräddarsyr den för sina modeller. Porsche 918 Spyder Porsche Cayenne S Hybrid Porsche 911 GT3 R Hybrid HYBRID.
teknik TEXT: JONAS JARLMARK, BILD PORSCHE AG Hybridtekniken tar snabba kliv framåt när Porsche skräddarsyr den för sina modeller. Porsche 918 Spyder Porsche Cayenne S Hybrid Porsche 911 GT3 R Hybrid HYBRID.
Mätning av lågfrekventa magnetfält i bilar
 Sida: 1/6 MÄTPROTOKOLL Datum: 2010-03-03 Vår referens: SSM 2010/861 Författare: Jimmy Estenberg Fastställd: Hélène Asp, 2010-03-03 Mätning av lågfrekventa magnetfält i bilar Syftet med mätningarna var
Sida: 1/6 MÄTPROTOKOLL Datum: 2010-03-03 Vår referens: SSM 2010/861 Författare: Jimmy Estenberg Fastställd: Hélène Asp, 2010-03-03 Mätning av lågfrekventa magnetfält i bilar Syftet med mätningarna var
Energi, el, värmepumpar, kylanläggningar och värmeåtervinning. Emelie Karlsson
 Energi, el, värmepumpar, kylanläggningar och värmeåtervinning Emelie Karlsson Innehåll Grundläggande energikunskap Grundläggande ellära Elmotorer Värmepumpar och kylteknik Värmeåtervinning Energikunskap
Energi, el, värmepumpar, kylanläggningar och värmeåtervinning Emelie Karlsson Innehåll Grundläggande energikunskap Grundläggande ellära Elmotorer Värmepumpar och kylteknik Värmeåtervinning Energikunskap
Manual för hybrid regulator Till WK-450/WK-750
 Manual för hybrid regulator Till WK-450/WK-750 Allmänt. Denna nya hybridregulator (vind/sol) är en vidareutveckling av tidigare modeller och erbjuder senaste teknik inom området. Den är bla utrustad med
Manual för hybrid regulator Till WK-450/WK-750 Allmänt. Denna nya hybridregulator (vind/sol) är en vidareutveckling av tidigare modeller och erbjuder senaste teknik inom området. Den är bla utrustad med
Mål 2020: 20% av Mitsubishi Motors produktion ska vara elbilar
 Anders Erngren PR- och produktchef Mitsubishi Motors: Miljövision 2020 Utveckla elbilstekniken n Mål 2020: 20% av Mitsubishi Motors produktion ska vara elbilar (300 000 bilar) Reducera miljöpåverkan under
Anders Erngren PR- och produktchef Mitsubishi Motors: Miljövision 2020 Utveckla elbilstekniken n Mål 2020: 20% av Mitsubishi Motors produktion ska vara elbilar (300 000 bilar) Reducera miljöpåverkan under
LAB-PM. Bilväxellåda. Laboration i Maskinelement. / Stig Algstrand
 LAB-PM Laboration i Maskinelement Bilväxellåda / Stig Algstrand Inledning I den här laborationen ska vi gå lite djupare i ämnet maskinelement och ge oss in på något som förmodligen alla har sett i något
LAB-PM Laboration i Maskinelement Bilväxellåda / Stig Algstrand Inledning I den här laborationen ska vi gå lite djupare i ämnet maskinelement och ge oss in på något som förmodligen alla har sett i något
Module 6: Integrals and applications
 Department of Mathematics SF65 Calculus Year 5/6 Module 6: Integrals and applications Sections 6. and 6.5 and Chapter 7 in Calculus by Adams and Essex. Three lectures, two tutorials and one seminar. Important
Department of Mathematics SF65 Calculus Year 5/6 Module 6: Integrals and applications Sections 6. and 6.5 and Chapter 7 in Calculus by Adams and Essex. Three lectures, two tutorials and one seminar. Important
5-2 Likformighet-reguladetri
 5-2 Likformighet-reguladetri Namn:. Inledning Du har nu lärt dig en hel del om avbildningar, kartor och skalor. Nu är du väl rustad för att studera likformighet, och hur man utnyttjar det faktum att med
5-2 Likformighet-reguladetri Namn:. Inledning Du har nu lärt dig en hel del om avbildningar, kartor och skalor. Nu är du väl rustad för att studera likformighet, och hur man utnyttjar det faktum att med
BROMSIDÉER FÖR VINDKRAFTVERK
 BROMSIDÉER FÖR VINDKRAFTVERK Utvecklingen av ren energi fokuseras allt mer på vindkraftverk, vilket innebär att det blir allt viktigare att få ut största möjliga verkningsgrad av dessa. Mängden användbar
BROMSIDÉER FÖR VINDKRAFTVERK Utvecklingen av ren energi fokuseras allt mer på vindkraftverk, vilket innebär att det blir allt viktigare att få ut största möjliga verkningsgrad av dessa. Mängden användbar
Processidentifiering och Polplacerad Reglering
 UmU/TFE Laboration Processidentifiering och Polplacerad Reglering Introduktion Referenser till teoriavsnitt följer här. Processidentifiering: Kursbok kap 17.3-17.4. Jämför med det sista exemplet i kap
UmU/TFE Laboration Processidentifiering och Polplacerad Reglering Introduktion Referenser till teoriavsnitt följer här. Processidentifiering: Kursbok kap 17.3-17.4. Jämför med det sista exemplet i kap
PROV 3, A-DELEN Agroteknologi Vid inträdesprovet till agroteknologi får man använda en formelsamling.
 PROV 3, A-DELEN Agroteknologi Vid inträdesprovet till agroteknologi får man använda en formelsamling. Man bör få minst 10 poäng i både A- och B-delen. Om poängtalet i A-delen är mindre än 10 bedöms inte
PROV 3, A-DELEN Agroteknologi Vid inträdesprovet till agroteknologi får man använda en formelsamling. Man bör få minst 10 poäng i både A- och B-delen. Om poängtalet i A-delen är mindre än 10 bedöms inte
6.12 Räckvidd och uthållighet
 Prestanda Uthållighet och räckvidd För propeller- respektive jetdrivet flygplan Start- och landningsprestanda Innefattar acceleration 1 6.1 äckvidd och uthållighet Designaspekter räckvidd ( range ) Ta
Prestanda Uthållighet och räckvidd För propeller- respektive jetdrivet flygplan Start- och landningsprestanda Innefattar acceleration 1 6.1 äckvidd och uthållighet Designaspekter räckvidd ( range ) Ta
VINDKRAFT. Alternativ Användning
 Datum (2012-03-14) VINDKRAFT Alternativ Användning Elev: Andreas Krants Handledare: Anna Josefsson Sammanfattning Alternativa användningssätt för vindkraft är vad denna rapport handlar om, och med alternativ
Datum (2012-03-14) VINDKRAFT Alternativ Användning Elev: Andreas Krants Handledare: Anna Josefsson Sammanfattning Alternativa användningssätt för vindkraft är vad denna rapport handlar om, och med alternativ
Projekt: Filmat tornfall med modell av tornet. Benjamin Tayehanpour, Adrian Kuryatko Mihai
 Projekt: Filmat tornfall med modell av tornet Benjamin Tayehanpour, Adrian Kuryatko Mihai Abstrakt Detta dokument avhandlar vad som händer när ett torn faller. Såväl elastiska som stela kroppar behandlas.
Projekt: Filmat tornfall med modell av tornet Benjamin Tayehanpour, Adrian Kuryatko Mihai Abstrakt Detta dokument avhandlar vad som händer när ett torn faller. Såväl elastiska som stela kroppar behandlas.
Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen.
 Reglering Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen. Regulator eller reglerenhet används för att optimera
Reglering Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen. Regulator eller reglerenhet används för att optimera
4:2 Ellära: ström, spänning och energi. Inledning
 4:2 Ellära: ström, spänning och energi. Inledning Det samhälle vi lever i hade inte utvecklats till den höga standard som vi ser nu om inte vi hade lärt oss att utnyttja elektricitet. Därför är det viktigt
4:2 Ellära: ström, spänning och energi. Inledning Det samhälle vi lever i hade inte utvecklats till den höga standard som vi ser nu om inte vi hade lärt oss att utnyttja elektricitet. Därför är det viktigt
Vi föreslår istället ett nytt koncept som man kan kombinera med dagens system så att övergången från gårdagen till morgondagen inte blir så radikal.
 Förbränningsmotorns utsläpp av koldioxid, CO2, påverkar klimatet negativt. Vi försöker minska användandet av våra bilar för att komma bort från problemet. Vi föreslår istället ett nytt koncept som man
Förbränningsmotorns utsläpp av koldioxid, CO2, påverkar klimatet negativt. Vi försöker minska användandet av våra bilar för att komma bort från problemet. Vi föreslår istället ett nytt koncept som man
Q I t. Ellära 2 Elektrisk ström, kap 23. Eleonora Lorek. Ström. Ström är flöde av laddade partiklar.
 Ellära 2 Elektrisk ström, kap 23 Eleonora Lorek Ström Ström är flöde av laddade partiklar. Om vi har en potentialskillnad, U, mellan två punkter och det finns en lämplig väg rör sig laddade partiklar i
Ellära 2 Elektrisk ström, kap 23 Eleonora Lorek Ström Ström är flöde av laddade partiklar. Om vi har en potentialskillnad, U, mellan två punkter och det finns en lämplig väg rör sig laddade partiklar i
JF-Link. Trådlös elmanövrering av hydraulik. Instruktionsbok. Bruksanvisning i original
 JF-Link Trådlös elmanövrering av hydraulik Instruktionsbok Bruksanvisning i original S INNEHÅLLSFÖRTECKNING 1. JF-LINK TRÅDLÖS ELMANÖVRERING AV HYDRAULIK... 5 VENTILBOX... 5 INLÄRNING AV FJÄRRMANÖVRERING...
JF-Link Trådlös elmanövrering av hydraulik Instruktionsbok Bruksanvisning i original S INNEHÅLLSFÖRTECKNING 1. JF-LINK TRÅDLÖS ELMANÖVRERING AV HYDRAULIK... 5 VENTILBOX... 5 INLÄRNING AV FJÄRRMANÖVRERING...
Körschema för Umeå Energis produktionsanläggningar
 Körschema för Umeå Energis produktionsanläggningar Karl-Johan Gusenbauer Caroline Ödin Handledare: Lars Bäckström Inledning och syfte Ungefär hälften av all uppvärmning av bostäder och lokaler i Sverige
Körschema för Umeå Energis produktionsanläggningar Karl-Johan Gusenbauer Caroline Ödin Handledare: Lars Bäckström Inledning och syfte Ungefär hälften av all uppvärmning av bostäder och lokaler i Sverige
WALLENBERGS FYSIKPRIS
 WALLENBERGS FYSIKPRIS KVALIFICERINGS- OCH LAGTÄVLING 22 januari 2009 SVENSKA FYSIKERSAMFUNDET LÖSNINGSFÖRSLAG 1. (a) Rörelsemotståndsarbetet på nervägen är A n = F motst s = k mg s = k (2 180 + 52 100)
WALLENBERGS FYSIKPRIS KVALIFICERINGS- OCH LAGTÄVLING 22 januari 2009 SVENSKA FYSIKERSAMFUNDET LÖSNINGSFÖRSLAG 1. (a) Rörelsemotståndsarbetet på nervägen är A n = F motst s = k mg s = k (2 180 + 52 100)
Scania Active Prediction ny farthållare sparar bränsle med hjälp av GPS
 PRESS info P11Z01SE / Per-Erik Nordström 2 december 2011 Scania Active Prediction ny farthållare sparar bränsle med hjälp av GPS Scania blir först med en ny avancerad farthållare som använder GPS för att
PRESS info P11Z01SE / Per-Erik Nordström 2 december 2011 Scania Active Prediction ny farthållare sparar bränsle med hjälp av GPS Scania blir först med en ny avancerad farthållare som använder GPS för att
Linköpings Universitet. Matematiska institutionen/optimeringslära Kaj Holmberg IT Termin 5. IT Termin Vinjetter
 Linköpings Universitet Vinjetter Matematiska institutionen/optimeringslära 160808 Kaj Holmberg IT Termin 5 IT Termin 5 2016 Vinjetter Inledning Miljöaspekter blir allt viktigare att ta med i beräkningen
Linköpings Universitet Vinjetter Matematiska institutionen/optimeringslära 160808 Kaj Holmberg IT Termin 5 IT Termin 5 2016 Vinjetter Inledning Miljöaspekter blir allt viktigare att ta med i beräkningen
LEGO MINDSTORMS Education EV3 Naturvetenskapligt aktivitetspaket
 LEGO MINDSTORMS Education EV3 Förmågorna i ämnet Teknik Arbetet med EV3 ger eleverna förutsättningar att utveckla sin förmåga att: identifiera och analysera tekniska lösningar utifrån ändamålsenlighet
LEGO MINDSTORMS Education EV3 Förmågorna i ämnet Teknik Arbetet med EV3 ger eleverna förutsättningar att utveckla sin förmåga att: identifiera och analysera tekniska lösningar utifrån ändamålsenlighet
7.1.1 Modulindelning. Delsystem: Pneumatiskt system. Elmotor för rotation. Axel. Lager. Chuck. Ram. Kylsystem. Sensorer
 7 Konstruera konceptet 7.1 Systemarkitektur En utförlig systemarkitektur har satts upp för att underlätta konstruktionen av produkten. Genom att omforma delsystemen till moduler fås en bättre översikt.
7 Konstruera konceptet 7.1 Systemarkitektur En utförlig systemarkitektur har satts upp för att underlätta konstruktionen av produkten. Genom att omforma delsystemen till moduler fås en bättre översikt.
Ett urval D/A- och A/D-omvandlare
 Ett urval D/A- och A/D-omvandlare Om man vill ansluta en mikrodator (eller annan digital krets) till sensorer och givare så är det inga problem så länge givarna själva är digitala. Strömbrytare, reläer
Ett urval D/A- och A/D-omvandlare Om man vill ansluta en mikrodator (eller annan digital krets) till sensorer och givare så är det inga problem så länge givarna själva är digitala. Strömbrytare, reläer
KTH MMK JH TENTAMEN I HYDRAULIK OCH PNEUMATIK allmän kurs 2006-12-18 kl 09.00 13.00
 KTH MMK JH TENTAMEN I HYDRAULIK OCH PNEUMATIK allmän kurs 2006-12-18 kl 09.00 13.00 Svaren skall vara läsligt skrivna och så uppställda att lösningen går att följa. När du börjar på en ny uppgift - tag
KTH MMK JH TENTAMEN I HYDRAULIK OCH PNEUMATIK allmän kurs 2006-12-18 kl 09.00 13.00 Svaren skall vara läsligt skrivna och så uppställda att lösningen går att följa. När du börjar på en ny uppgift - tag
Varvtalsstyrning av likströmsmotorer
 Varvtalstyrning av likströmsmotorer Föreläsning 6 Kap 3.6 Grundkretsar med transistorer, avsnitt Transistorn som switch sid 3-42. Kap. 7.6 Kraftelektronik avsnitten Systemuppbyggnad sid 7-36, Likspänningsomvandlare
Varvtalstyrning av likströmsmotorer Föreläsning 6 Kap 3.6 Grundkretsar med transistorer, avsnitt Transistorn som switch sid 3-42. Kap. 7.6 Kraftelektronik avsnitten Systemuppbyggnad sid 7-36, Likspänningsomvandlare
Tentamen: Baskurs B i Fysik, del1, 4p 2007-03-23 kl. 08.00-13.00
 Institutionen för teknik, fysik och matematik Nils Olander och Herje Westman Tentamen: Baskurs B i Fysik, del1, 4p 2007-03-23 kl. 08.00-13.00 Max: 30 p A-uppgifterna 1-8 besvaras genom att ange det korrekta
Institutionen för teknik, fysik och matematik Nils Olander och Herje Westman Tentamen: Baskurs B i Fysik, del1, 4p 2007-03-23 kl. 08.00-13.00 Max: 30 p A-uppgifterna 1-8 besvaras genom att ange det korrekta
Fr. FUF /km t. CBM. Från förebyggande underhåll baserat på presterade kilometer till parametrar som indikerar individuell status
 Fr. FUF /km t. CBM Från förebyggande underhåll baserat på presterade kilometer till parametrar som indikerar individuell status FUF Förebyggande underhåll fordon Idag underhålls alla fordon baserat på
Fr. FUF /km t. CBM Från förebyggande underhåll baserat på presterade kilometer till parametrar som indikerar individuell status FUF Förebyggande underhåll fordon Idag underhålls alla fordon baserat på
Vetenskapsdagen 2016 SciLab för laborativa inslag i matematik eller fysik
 Vetenskapsdagen 2016 SciLab för laborativa inslag i matematik eller fysik Fredrik Berntsson (fredrik.berntsson@liu.se) 5 oktober 2016 Frame 1 / 23 Bakgrund och Syfte Inom kursen Fysik3 finns material som
Vetenskapsdagen 2016 SciLab för laborativa inslag i matematik eller fysik Fredrik Berntsson (fredrik.berntsson@liu.se) 5 oktober 2016 Frame 1 / 23 Bakgrund och Syfte Inom kursen Fysik3 finns material som
Roterande elmaskiner
 ISY/Fordonssystem LABORATION 3 Roterande elmaskiner Likströmsmaskinen med tyristorlikriktare och trefas asynkronmaskinen (Ifylles med kulspetspenna ) LABORANT: PERSONNR: DATUM: GODKÄND: (Assistentsign)
ISY/Fordonssystem LABORATION 3 Roterande elmaskiner Likströmsmaskinen med tyristorlikriktare och trefas asynkronmaskinen (Ifylles med kulspetspenna ) LABORANT: PERSONNR: DATUM: GODKÄND: (Assistentsign)
Tentamen. TSFS 02 Fordonsdynamik med reglering 14 januari, 2017, kl. 8 12
 Tentamen TSFS 02 Fordonsdynamik med reglering 14 januari, 2017, kl. 8 12 Hjälpmedel: Miniräknare. Ansvarig lärare: Jan Åslund, 281692. Totalt 50 poäng. Betygsgränser: Betyg 3: 23 poäng Betyg 4: 33 poäng
Tentamen TSFS 02 Fordonsdynamik med reglering 14 januari, 2017, kl. 8 12 Hjälpmedel: Miniräknare. Ansvarig lärare: Jan Åslund, 281692. Totalt 50 poäng. Betygsgränser: Betyg 3: 23 poäng Betyg 4: 33 poäng
Lathund fo r rapportskrivning: LATEX-mall. F orfattare Institutionen f or teknikvetenskap och matematik
 Lathund fo r rapportskrivning: LATEX-mall F orfattare forfattare@student.ltu.se Institutionen f or teknikvetenskap och matematik 31 maj 2017 1 Sammanfattning Sammanfattningen är fristående från rapporten
Lathund fo r rapportskrivning: LATEX-mall F orfattare forfattare@student.ltu.se Institutionen f or teknikvetenskap och matematik 31 maj 2017 1 Sammanfattning Sammanfattningen är fristående från rapporten
Rivning av betongblock stelkroppssimulering, överslagsberäkningar och diskussion
 Rivning av betongblock stelkroppssimulering, överslagsberäkningar och diskussion Per-Erik Austrell Univ.lektor Byggnadsmekanik LTH 29/4-04 1 Förord Det här arbetet är gjort på uppdrag av NCC i samband
Rivning av betongblock stelkroppssimulering, överslagsberäkningar och diskussion Per-Erik Austrell Univ.lektor Byggnadsmekanik LTH 29/4-04 1 Förord Det här arbetet är gjort på uppdrag av NCC i samband
Kurskod: 6B2267 (Ten1 2p) Examinator: William Sandqvist Tel
 Examinator: William Sandqvist Tel") Institutionen för Tillämpad IT Omtentamen i Givare och Ställdon (även omtentamen Mekatronik-komponenter 6B31 med annan rättning) Kurskod: 6B67 (Ten1 p) Datum: 10/4 007 Tid: 13.00-17.00 Examinator: William
Institutionen för Tillämpad IT Omtentamen i Givare och Ställdon (även omtentamen Mekatronik-komponenter 6B31 med annan rättning) Kurskod: 6B67 (Ten1 p) Datum: 10/4 007 Tid: 13.00-17.00 Examinator: William
Elektro och Informationsteknik LTH. Laboration 3 RC- och RL-nät i tidsplanet. Elektronik för D ETIA01
 Elektro och Informationsteknik LTH Laboration 3 R- och RL-nät i tidsplanet Elektronik för D ETIA01??? Telmo Santos Anders J Johansson Lund Februari 2008 Laboration 3 Mål Efter laborationen vill vi att
Elektro och Informationsteknik LTH Laboration 3 R- och RL-nät i tidsplanet Elektronik för D ETIA01??? Telmo Santos Anders J Johansson Lund Februari 2008 Laboration 3 Mål Efter laborationen vill vi att
TENTAMENSUPPGIFTER I ELEKTROTEKNIK MED SVAR
 ELEKTOTEKNIK Inlämningstid Kl: 1 MSKINKONSTUKTION KTH TENTMENSUPPGIFTE I ELEKTOTEKNIK MED SV Elektroteknik MF117 11 1 18 Kl: 14: 17: För godkänt fordras c:a 5% av totalpoängen. Du får lämna salen tidigast
ELEKTOTEKNIK Inlämningstid Kl: 1 MSKINKONSTUKTION KTH TENTMENSUPPGIFTE I ELEKTOTEKNIK MED SV Elektroteknik MF117 11 1 18 Kl: 14: 17: För godkänt fordras c:a 5% av totalpoängen. Du får lämna salen tidigast
Systemskiss. Michael Andersson Version 1.0: 2012-09-24. Status. Platooning 2012-09-24. Granskad DOK, PL 2012-09-19 Godkänd Erik Frisk 2012-09-24
 2012-09-24 Systemskiss Michael Andersson Version 1.0: 2012-09-24 Status Granskad DOK, PL 2012-09-19 Godkänd Erik Frisk 2012-09-24 Systemskiss i 2012-09-24 Projektidentitet, TSRT10, HT2012, Tekniska högskolan
2012-09-24 Systemskiss Michael Andersson Version 1.0: 2012-09-24 Status Granskad DOK, PL 2012-09-19 Godkänd Erik Frisk 2012-09-24 Systemskiss i 2012-09-24 Projektidentitet, TSRT10, HT2012, Tekniska högskolan
SÄKERHETSAVSTÅND I BILKÖER
 ÄKERHETAVTÅND I BILKÖER En studie i bilars stoppavstånd Foad aliba Bassam Ruwaida Hassan hafai Hajer Mohsen Ali Mekanik G118 den 7 februari 8 AMMANFATTNING Projektet utgångspunkt har varit att svara på
ÄKERHETAVTÅND I BILKÖER En studie i bilars stoppavstånd Foad aliba Bassam Ruwaida Hassan hafai Hajer Mohsen Ali Mekanik G118 den 7 februari 8 AMMANFATTNING Projektet utgångspunkt har varit att svara på
Minskad energiförbrukning och högre hastigheter
 Minskad energiförbrukning och högre hastigheter Piotr Lukaszewicz Avd Spårfordon Inst för Farkost & Flyg KTH P Lukaszewicz: Railvehicles, KTH 2008-01-09 1 1. Gångmotstånd = Bromsande krafter som motsätter
Minskad energiförbrukning och högre hastigheter Piotr Lukaszewicz Avd Spårfordon Inst för Farkost & Flyg KTH P Lukaszewicz: Railvehicles, KTH 2008-01-09 1 1. Gångmotstånd = Bromsande krafter som motsätter