Shader Shader. Shader 4.1
|
|
|
- Berit Engström
- för 6 år sedan
- Visningar:
Transkript
1
 ) ) ) ) 4.1 S 4.")
2 d d 3 9 Shader Shader ( Shader ) ) ) ) ) 4.1 S 4.1

3 4.2 p p 4.2 Cartesian Coordinate System René Descartes 4.2 f t g V o X 41

4 x y 4.3 x y 30 x y OpenGL DirectX 4.4 f 1, C./ - 8 o ex f U. 50% ( U
5 4.2 3 basis vector 3 1 orthonormal basis 1 orthogonal basis 4.6 left-handed coordinate space right-handed coordinate space 43
6 4.2 x y OpenGL DirectX 180 y x x 4.6 +z +z x y handedness A B L. +x +y +z ) 3 forward 44


7 4.2 x y z z left-hand rule right-hand rule (( ~ ) 2 ~?


8 4.2 e ( 4.11 e X x 1 z z x 1 z 4 60 z z 5C Unity 4.6 Unity Scene 4.12 right up forward x y z 46

9 4.2 5C e O P Unity z z C w Unity d ) 1 3ds Max x y z 2 0, 0, 1 y +90 0, 0, 1 y Unity 0, 1, 10 Rotation (0, 0, 0) Scale 1, 1, 1 (0, 1, 0) 4.14 O P w O P z z 47
10 point n 2 3 P (P x, P y ) P (P x, P y, P z ) vector scalar n magnitude direction velocity 80km/h 80km/h distance v (x, y) v (x, y, z) v (x, y, z, w) a b x y z θ α a b u v A B S M R 4.15 head tail km/h 100km/h displacement ~
11 4.3 f o ( b ) c / kv (kv x, kv y, kv z ) v (x, y, z) 1 k k k (x, y, z) x k, y k, z,k 0 k 2(1, 2, 3) (2, 4, 6) 3.5(2, 0) ( 7, 0) (1,2,3) (0.5,1,1.5) 2 v k v k : 2 k <
12 4.3 a + b (a x + b x, a y + b y, a z + b z ) a b (a x - b x, a y - b y, a z - b z ) (1, 2, 3) + (4, 5, 6) (5, 7, 9) (5, 2, 7) - (3, 8, 4) (2, -6, 3) a b a b a b a b a+b triangle rule 4.18 ) f i c f a b a b b a b a 4.19 ( ( v v + v + v x y z (1,2,3) (3,4)
13 4.3 n
14 4.3 ( unit vector 1 normalized vector normalization v v ^v ^ v v,v v (3, 4) (3, 4) (3, 4) (3, 4) ( 4) 2 25 (3, 4) 3 5 5, 4 (0.6, 0.8) 5 0 v (0, 0, 0) ( dot product inner product cross product outer product ~ Shader Unity Shader dot(a, b) a b f s V 52
15 4.3 a b (a x, a y, a z ) (b x, b y, b z ) a x b x + a y b y + a z b z (1, 2, 3) (0.5, 4, 2.5) (-3, 4, 0) (5, -1, 7) a b b a projection ^a b b ^a ( ^a b b ^a ( ^a b ^a b ^a 4.22 ^a b V ^a a b b a a Shader. (ka) b a (kb) k(a b) :: a (b + c) a b + a c c c 53
16 4.3 v v v x v x + v y v y + v z v z v 2 a b a b cosθ ^a ^b 4.24 ^b 1 cosθ ^a ^b cosθ 4.24 ^a ^b cosθ a b ( a ^a ) ( b ^b ) a b ( ^a ^b ) a b cosθ 90 cosθ > 0 90 cosθ 0 90 cosθ < arcos ( θ arcos( ^a ^b ) ^a ^b cross product outer product a b a b (a x, a y, a z ) (b x, b y, b z ) (a y b z - a z b y, a z b x - a x b z, a x b y - a y b x )
17 4.3 U X e o n co f f c (1, 2, 3) ( 2, 1, 4) ((2)(4) (3)( 1), (3)( 2) (1)(4), (1)( 1) (2)( 2)) (8 ( 3), ( 6) 4, ( 1) ( 4)) (11, 10, 3) a b b a a b (b a) (a b) c a (b c). a b a b a b a b sinθ a b b h h a θ A b h b ( a sinθ) a b sinθ a b a b 0 a b ( 9 ) 55
18 4.3 a b a b a b a b 4.28 a b! ) d )! (2, 7, 3) 2 2.5(5, 4, 10) 3 (3,4) 2 4 (5, 12) 5 (1, 1, 1) 6 (7, 4) + (3, 5) 7 (9, 4, 13) (15, 3, 11) 3 (10, 13, 11) (2, 1, 1) 4 1 (4, 7) (3, 9) 2 (2, 5, 6) (3, 1, 2) 10 56
19 ( 3, 4) ( 2, 5) 4 (3, 1, 2) ( 5, 4, 1) 5 ( 5, 4, 1) (3, 1, 2) 5 a b a 4 b
20 4.4 1 a b 3 2 a b sin cos NPC p forward v 1 x NPC 2 1 p (4, 2), v ( 3, 4), x (10, 6) 3 NPC φ φ NPC 2 NPC x 4 3 NPC 7 3 p 1 p 2 p 3 p 1 p 2 p 3 xy z 0 z z matrix The Matrix matrix matrix The Matrix ( 1 ( a U U g V g 58
21 m n row column M m m m m21 m22 m23 m m m m ij M i j n 1 column matrix 1 n row matrix n v (3, 8, 6) [3 8 6] Shader c
22 4.4 m11 m12 m13 km11 km12 km13 kmm k k m m m km km km m31 m32 m 33 km31 km32 km 33 c r n A n c B AB r c A 4 3 B 3 6 AB 4 6 r n A n c B r c C AB C c ij A i B j c ij a i1 b 1j + a i2 b 2j + + a in b nj c ij A i B j c ij 4.30 A 4 2 B 2 4 C c 23 A 2 B 3 c 23 a 21 b 13 + a 22 b 23 Shader 4 4 AB BA (AB)C A(BC) ABCDE ((A(BC))D)E (AB)(CD)E ~ n k 1 ab ik kj 60
23 4.4 Shader. 1 square matrix diagonal elements m 11 m 22 m 33 ( 0 diagonal matrix identity matrix I n 3 3 I MI IM M 1 3 transposed matrix r c M M T c r i i j j M T ij M 6 7 T ji 61
24 4.4 z x [ x y z] T y T x y [ x y z] z (M T ) T M (AB) T B T A T 4 inverse matrix M M 1 M M -1 MM 1 M 1 M I 0 0 invertible nonsingular noninvertible singular determinant 0 Shader C++ Eigen Unity Unity Unity 4.8 M (M 1 ) 1 M I 1 I 62
25 4.4 (M T ) 1 (M 1 ) T (AB) 1 B 1 A 1 (ABCD) 1 D 1 C 1 B 1 A M v M 1 M 1 (Mv) (M 1 M)v Iv v orthogonal matrix M orthogonal M MM T M T M I. M M T M 1. MM T I 3 3 c1 T MM c c c c c3 c1 c1 c1 c2 c1 c3 c2 c1 c2 c2 c2 c3 c 3 c1 c3 c2 c3 c I
26 4.4 9 c 1 c 1 1 c 1 c 2 0 c 1 c 3 0 c 2 c 1 0 c 2 c 2 1 c 2 c 3 0 c 3 c 1 0 c 3 c 2 0 c 3 c 3 1 ~ c 1 c 2 c 3 1 c 1 c 2 c 3 0 ~ M M T orthogonal basis 1 1 orthonormal basis 1. v (x, y, z) v [x y z] v [x y z] T M m m m M m m m m m m M M M vm [ xm + ym + zm xm + ym + zm xm + ym + zm ] xm 11 + ym 12 + zm 13 Mv xm 21 + ym 22 + zm 23 xm 31 + ym 32 + zm 33 64
27 4.4 Unity CBAv ( C( B( Av ))) v A B C T T T T T T va B C ((( va ) B ) C ) ) 3 ( d cosθ sinθ 0 3 sinθ cosθ
28 4.5 as 3 (3, 2, 6) as ( ( ~ : 30? transform. linear transform ( f(x) + f(y) f(x + y) kf(x) f(kx) scale ( f(x) 2x 2 :. x f(x) 2x rotation ( ( 3 3 ( 66
29 4.5 as ( : shear mirroring reflection orthographic projection : ( f(x) x + (1, 2, 3) ( 既不 也 x (1, 1, 1) f(x) + f(x) (4, 6, 8) f(x + x) (3, 4, 5) 3 3 affine transform ( 4 4 homogeneous space N Y N Y Y N Y Y Y Y Y Y Y Y : : Y Y Y N Y Y Y N Y Y Y Y Y Y N N N N N N : ~ homogeneous coordinate w 1 w :. 4 4 : 67
30 4.5 as : 4 M 0 t M 3 3 : t [0 0 0] : tx x x+ tx t y y y+ ty t z z z+ t z x y z 3D (x, y, z) (t x, t y, t z ) tx x x t y y y t z z z t 3 1 M 3 3 I t x t y t z x y z : : 68
31 4.5 as kx x kxx 0 ky 0 0 y kyy 0 0 kz 0 z kzz : kx x kxx 0 ky 0 0 y kyy 0 0 kz 0 z kzz : k x k y k z : uniform scale nonuniform scale : : : : ( : 4.7 : : : kx k y kz : : : : : : ( x y z x θ cosθ sinθ 0 R x ( θ) 0 sinθ cosθ y 69
32 4.5 as cosθ 0 sinθ R y ( θ ) sinθ 0 cosθ z 70
33 4.5 as R z cosθ sinθ 0 0 sinθ cosθ 0 0 ( θ ) ) : (2, 2, 2) : y 30 z 4 p new M translation M rotation M scale p old : : : (0, 0, 5) (0, 0, 10): 2 : y : t x cosθ 0 sinθ 0 k x t M translation M rotation M scale y k y t z sinθ 0 cosθ k z k x cosθ 0 k z sinθ t x 0 k y 0 t y k x sinθ 0 k z cosθ t z : 71
34 4.6 cosθ 0 sinθ 0 k x t x M rotation M scale M translation 0 k y t y sinθ 0 cosθ k z t z k x cosθ 0 k z sinθ t x k x cosθ + t z k z sinθ 0 k y 0 t y k y k x sinθ 0 k z cosθ t x k x sinθ + t z k z cosθ x y z x y z (θ x, θ y, θ z ) Unity zxy API (θ x, θ y, θ z ) cosθ z sinθ z cosθ y 0 sinθ y 0 sinθ M rotatez M rotatex M rotatey z cosθ z 0 00 cosθ x sinθ x sinθ x cosθ x 0 sinθ y 0 cosθ y zxy (θ x, θ y, θ z ) E z θ z E y θ y E x θ x E z θ z E z θ z E' y θ y E' y θ y E'' x θ x zxy yxz Unity ) 4.6. : 2 ( ( 72
35 4.6.,. ( X Shader? Shader? ~ (. ( ( 3 73
36 4.6 parent P C 3 A c A p B p B c A p M c p A c B c M p c B p M c p M p c M c p (a, b, c) x a 3 y b 4 z c 4 C 3 P x c y c z c O c A c (a,b,c) 4 A n. O. x O + ax c O + ax + by c c c c c p O + ax + by + cz c c c c. M c p A O + ax + by + cz p c c c c 74
37 A p O c + ax c + by c + cz c (x Oc, y Oc, z Oc ) + a(x xc, y xc, z xc ) + b(x yc, y yc, z yc ) + c(x zc, y zc, z zc ) (x Oc, y Oc, z Oc ) + x xc x yc x zc y xc y yc y zc z xc z yc z zc a b c (x Oc, y Oc, z Oc ) + x c y c z c a b c. 3 3 A p (x Oc, y Oc, z Oc,1) + 0 x c y c z c a b c x Oc y Oc z Oc x c y c z c a b c 1 x Oc x c y c z c y Oc z Oc a b c 1 x c y c z c O c a b c 1 M c p c c c c c p x y z O M M c p M p c C
38 4.6 P P C M c p C P x c y c z c : 4 4 : x y z M c p C P C x (1, 0, 0, 0) M c p [ ] T M c p 3 3 Mc p xc yc zc Shader 3 3 ( M p c M c p M p c M p c M c p M c p 1 T M p c x p y p z p M c p M c p x c y c z c M c p x c y c z c x p y p z p M c p M A B A x B B x A B x y z A A B 76
39 4.6. P C C P A B. B x y z A x B y B z B A B M A B MA B xb yb z B M A B x B B x (1,0,0) B x (1, 0, 0) MA Bx B xb yb zb x xb xb xb 1 MA Bx B B B 0 B y xb y x z B zb xb 0. ( (., B 77

 p (0, 2, 4, 1) 4.")
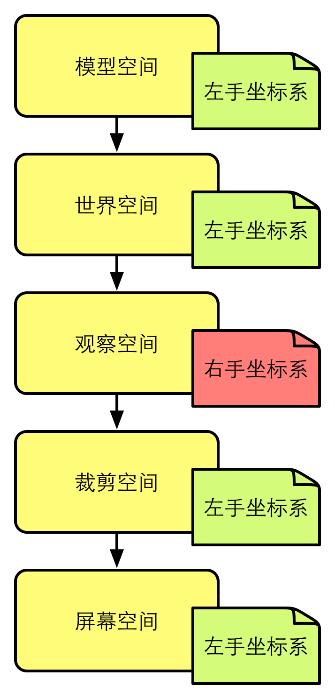
40 4.6 O P V O P V ( model space object space local space. forward back left right up down Unity +x +y +z x y z Unity Hierarchy 3? Unity (0, 2, 4) p (0, 2, 4, 1) 4.32 ( world space 78
41 4.6 Unity x y z Unity Transform Position Transform parent Transform 4.33 Transform Rotation Scale model transform Transform


42 4.6 5C 4 9CG D o 4 9CG D L0 G M 2DG DC W e O L,D MP T p 2DG DC n Transform (2, 2, 2) : (0, 150, 0) (5, 0, 25) : t x cosθ 0 sinθ 0 k x t M model y k y t z sinθ 0 cosθ k z P world M model P model (9, 4, ) 3 Unity 80

43 4.6 ( ( view space camera space ~ ~ Unity Unity +x +y +z ~ +z Unity OpenGL -z Unity Unity Camera.camera ToWorldMatrix Camera.worldToCameraMatrix projection view transform Transform 4.35 g O e P 5C e W e p n
44 4.6 Transform (30, 0, 0) (0, 10, 10) (0, 10, 10) ( 30, 0, 0) t x 0 cosθ sinθ 0 M view t y 0 sinθ cosθ t z z, M view M negate z M view P view M view P world (9, 8.84, 27.31) 82


45 4.6 () clip space clip matrix projection matrix view frustum clip planes orthographic projection perspective projection ( O P O ö入 门 精 要 4.36 P W e èé ìå 3D near øý 6 far clip plane ¼ òí clip plane 2D º HUD 4.37 ) w e w e w 83

46 4.6 homogeneous division. w x y z : 6. : w x y z w 1 w Unity Camera Game Camera Field of View FOV w Clipping Planes Near Far FOV nearclipplaneheight 2 Near tan 2 FOV farclipplaneheight 2 Far tan 2 ; Unity 84
47 4.6 Game Viewport Rect W H Unity Camera.aspect ~ Aspect nearclipplanewidth Aspect nearclipplaneheight Aspect farclipplanewidth farclipplaneheight Near Far FOV Aspect M frustum FOV cot Aspect FOV 0 cot Far + Near 2 Near Far 0 0 Far Near Far Near Unity z [-w, w] DirectX z [0, w] ~!!"#$!!"#$%#&!!"#$ cot!"# 2!"#$%& cot!"# !"# +!"#$ 2!"#$!"#!"#!"#$!!"!"#$ !"# cot! 2!"#$%&!cot!"# 2!"# +!"#$ 2!"#$!"#!!"#!"#$!"#!"#$! x y z : z : w 1 z, w x w!!! 1 85

48 4.6 w y w w z w e e n i o 4.39 z 6 Unity Camera Game 4.40 Camera Size Clipping Planes Near Far w nearclipplaneheight 2 Size farclipplaneheight nearclipplaneheight ; Aspect nearclipplanewidth Aspect nearclipplaneheight farclipplanewidth nearclipplanewidth 86
49 4.6 Near Far Size Aspect Aspect Size M ortho Size 2 Far + Near 0 0 Far Near Far Near Unity P clip Aspect Size x y Size z 2 Far + Near Far Near Far Near x Aspect Size y Size 2z Far + Near Far Near Far Near 1 M ortho P view w 1 [ ] [ ] (9, 8.84, ) 3D Game

50 4.6 e e n i o FOV 60 Near 5 Far 40 Aspect 4/
51 4.6 cot FOV Aspect M frustum 0 cot FOV Far + Near 0 0 Far Near Near Far Far Near P clip M frustum P view (11.691, , , 27.31) Unity w x w w x y w z w (. screen space. 2D homogeneous division perspective division w x y z OpenGL Normalized Device Coordinates NDC. NDC.. OpenGL x y z [ 1, 1] DirectX API z [0, 1] Unity OpenGL
52 4.6 s w.. w 1 x y z 4.44 s w. x y Unity 0, 0 (pixelwidth, pixelheight) x y [ 1, 1] : 90
53 4.6 clipx pixelwidth pixelwidth screenx + 2 clip 2 screen y w clipy pixelheight pixelheight + 2 clip 2 w x y z z clip z clip w clip w. NDC Unity (11.691, , , 27.31), NDC clipx pixelwidth pixelwidth screenx + 2 clip 2 screen y clipy pixelheight pixelheight + 2 clip ( , ) ( w w Unity 4.46 Unity 4.46 Unity tangent space ( (

54 4.6 ( 5C 92
 h 3 3 ( ( ( T B M A B T A T A T B A B ( M A B ( ( 4.48 s X ( ( T A ( N A T A N A 0 M A B.")
55 ( normal normal vector. ( ( ( M A B A B ( ( tangent tangent vector ( ( ( 4.47 ( ( 3 3 M A B ) h 3 3 ( ( ( T B M A B T A T A T B A B ( M A B ( ( 4.48 s X ( ( T A ( N A T A N A 0 M A B. T B M A B T A G ( N A ( 93
56 4.8 Unity Shader O P ( T B N B (M A B T A ) (GN A ) 0 T T T T T ( M T ) ( GN ) ( M T ) ( GN ) T M GN T ( M G) N 0 A B A A A B A A A A B A A A B A T A N A 0 M T A BG I T 1 1 T G ( M ) ( M ) ( A B A B M A B M 1 M T T 1 ( M ) M A B A B A B A B ( : : T : k M A B ( MA B) M A B k ( 4.8 Unity Shader O P 1 1 Unity Shader Unity UnityShaderVariables.cginc 4.2 Unity 5.2 float4x4 Unity Unity Unity x 4.2 Unity UNITY_MATRIX_MVP UNITY_MATRIX_MV UNITY_MATRIX_V UNITY_MATRIX_P UNITY_MATRIX_VP UNITY_MATRIX_T_MV UNITY_MATRIX_IT_MV _Object2World _World2Object / / / / / UNITY_MATRIX_MV UNITY_MATRIX_MV ( UNITY_MATRIX_MV / _Object2World / UNITY_MATRIX_T_MV 94
57 4.8 Unity Shader O P UNITY_MATRIX_MV UNITY_MATRIX_T_MV UNITY_MATRIX_T_MV UNITY_MATRIX_MV 4.5 : UNITY_MATRIX_MV : : k UNITY_MATRIX_MV : 1 k : UNITY_MATRIX_MV 1 k UNITY_MATRIX_T_MV UNITY_MATRIX_T_MV : : UNITY_MATRIX_IT_MV 4.7. ( UNITY_MATRIX_IT_MV ( UNITY_MATRIX_MV // S transpose UNITY_MATRIX_IT_MV // UNITY_MATRIX_MV c // float4 modelpos mul(transpose(unity_matrix_it_mv), viewpos); // fsx transpose mul c // float4 modelpos mul(viewpos, UNITY_MATRIX_IT_MV); mul Unity Camera 4.3 Unity Unity _WorldSpaceCameraPos float3 _ProjectionParams _ScreenParams _ZBufferParams float4 float4 float4 x y Near z Far w /Far Near Far x width y height z /width w /height width height render target x 1 Far/Near y Far/Near z x/far w y/far ( Z
58 4.9 unity_orthoparams float4 x width y heigth z w 1.0 w 0.0 width height unity_cameraprojection float4x4 unity_camerainvprojection float4x4 unity_cameraworldclipplanes[6] float ) ( : w 1 3 3, Unity Shader Cg Cg float Cg float3x3 float4x4 float3 float4 1 x n n x 1 float4 a float4(1.0, 2.0, 3.0, 4.0); float4 b float4(1.0, 2.0, 3.0, 4.0); // y float result dot(a, b); Cg mul float4 v float4(1.0, 2.0, 3.0, 4.0); float4x4 M float4x4(1.0, 0.0, 0.0, 0.0, 0.0, 2.0, 0.0, 0.0, 0.0, 0.0, 3.0, 0.0, 0.0, 0.0, 0.0, 4.0); // v M c float4 column_mul_result mul(m, v); // v M c float4 row_mul_result mul(v, M); // Scolumn_mul_result X g row_mul_result S // mul(m,v) mul(v, tranpose(m)) // mul(v,m) mul(tranpose(m), v) 96
59 4.9 Unity UNITY_MATRIX_MVP Cg Cg float4x (1, 2, 3, 4, 5, 6, 7, 8, 9) 3 x Cg Cg // r M float3x3 M float3x3(1.0, 2.0, 3.0, 4.0, 5.0, 6.0, 7.0, 8.0, 9.0); // M (1.0, 2.0, 3.0) float3 row M[0]; // M float ele M[1][0]; Unity Shader Cg Cg Unity API Unity Matrix4x4 Unity Shader 5C S,D 3 C2DG Shader / VPOS WPOS 5.4 VPOS HLSL WPOS Cg Unity Shader HLSL/Cg / / VPOS WPOS 97
![4.9 fixed4 frag(float4 sp : VPOS) : SV_Target { // o _ScreenParams.xy return fixed4(sp.xy/_screenparams.xy,0.0,1.0); } 4.49 VPOS/WPOS float4. xy 400 x 300 x [0.5, 400.5] y [0.5, 300.](/docs-images/101/148802088/images/60-2.jpg "5] OpenGL DirectX 10 0.5 zw Unity VPOS/WPOS z [0,1] z 0 z 1 w w 1 1, Near Far Near Far Camera w 1. w viewport space (0, 0) (1, 1) xy Unity ComputeScreenPos UnityCG.")
60 4.9 fixed4 frag(float4 sp : VPOS) : SV_Target { // o _ScreenParams.xy return fixed4(sp.xy/_screenparams.xy,0.0,1.0); } 4.49 VPOS/WPOS float4. xy 400 x 300 x [0.5, 400.5] y [0.5, 300.5] OpenGL DirectX zw Unity VPOS/WPOS z [0,1] z 0 z 1 w w 1 1, Near Far Near Far Camera w 1. w viewport space (0, 0) (1, 1) xy Unity ComputeScreenPos UnityCG.cginc ComputeScreenPos struct vertout { float4 pos : SV_POSITION; float4 scrpos : TEXCOORD0; }; vertout vert(appdata_base v) { vertout o; o.pos mul (UNITY_MATRIX_MVP, v.vertex); // S ComputeScreenPos scrpos o.scrpos ComputeScreenPos(o.pos); return o; } fixed4 frag(vertout i) : SV_Target { // f S scrpos.xy o scrpos.w float2 wcoord (i.scrpos.xy/i.scrpos.w); return fixed4(wcoord,0.0,1.0); }
61 4.9 viewport viewport x y clipx clip 2 w clipy clip 2 [-1, 1] NDC [0, 1] ComputeScreenPos UnityCG.cginc ComputeScreenPos inline float4 ComputeScreenPos (float4 pos) { float4 o pos * 0.5f; #if defined(unity_half_texel_offset) o.xy float2(o.x, o.y*_projectionparams.x) + o.w * _ScreenParams.zw; #else o.xy float2(o.x, o.y*_projectionparams.x) + o.w; #endif } o.zw pos.zw; return o; ComputeScreenPos pos. MVP UNITY_HALF_TEXEL_OFFSET Unity DirectX #else _ProjectionParams.x 1 1 Output Output x Output Output y z w w clipx clip clipy clip clipz clip w xy w ComputeScreenPos w Unity ComputeScreenPos w Unity x y w x w y w w w x w y w ( (. xy [0, 1] zw zw zw 99
62 4.11 d z [-Near, Far] w [Near, Far] z [ 1, 1] w [1][2] [3 ] ( [4] [1] Fletcher Dunn, Ian Parberry. 3D Math Primer for Graphics and Game Development (2nd Edition). November 2, 2011 by A K Peters/CRC Press [2] Eric Lengyel. Mathematics for 3D game programming and computer graphics (3rd Edition) by Charles River Media. [3] David Eberly. Conversion of Left-Handed Coordinates to Right-Handed Coordinates [4] d (1, 0, 0) (1, 0, 0) 4.50 m g O P O P X u p e z (0, 0, 1) (0, 0, 1) y
63 4.11 d X Unity z z 10 z z a b (a x, a y, a z ) (b x, b y, b z ) (a y b z a z b y, a z b x a x b z, a x b y a y b x ) (12.5, 10, 25) 3 (1.5, 2) (10, 9) 7 ( 6, 1, 2)
64 4.11 d ( 9, 13, 7) 5 (9, 13, 7) x - p v x NPC (x p) v v x p cosθ θ x - p v 0 θ < 90 x NPC 0 θ > 90 x NPC 0 θ 90 x NPC 2 (x p) v ((10, 6) (4, 2)) ( 3, 4) (6, 4) ( 3, 4) < 0 x NPC φ φ φ 3 cosθ cos cos θ > cos θ < NPC φ φ cosθ < cos θ > NPC cosθ 2 2 ( x p) v cosθ x p v cos φ 2 4 p 7 u p 2 - p 1 v p 3 - p 1 xy u (u x, u y, 0), v (v x, v y, 0) u v (0, 0, u x v y u y v x ) u x v y u y v x
65 4.11 d (1)( 1) + (3)(0) (1)(5) + (3)(2) (2)( 1) + (4)(0) (2)(5) + (4)(2) (1)( 5) + ( 2)(4) + (3)(8) (5)( 5) (1)(4) (4)(8) (6)( 5) + (0)(4) + (3)(8) z θ (3)(1) + (2)(0) + (6)(0) 1 [3 2 6] (3)(0) (2)(1) (6)(0) + + [3 2 6] (3)(0) + (2)(0) + (6)(1) (1)(3) + (0)(2) + (0)(6) (0)(3) (1)(2) (0)(6) (3)(0)(3) + (0)(2) + (1)(6) 6 (3, 2, 6) 2 103
66 4.11 d (3)(1) + (2)(0) + (6)(0) [3 2 6] (3)(0) (2)(1) (6)(0) + + [3 2 18] (3)(2) + (2)( 3) + (6)(3) (1)(3) + (0)(2) + (2)(6) (0)(3) (1)(2) ( 3)(6) (0)(3) + (0)(2) + (3)(6) 18 T [3 2 6] [3 2 6] (3)(1) + (2)(0) + (6)(2) (3)(0) (2)(1) (6)( 3) + + [ ] (3)(0) + (2)(0) + (6)(3) (3)(2) + (2)( 1) + (6)(3) [3 2 6] (3)( 1) (2)(5) (6)( 3) + + [ ] (3)(3) + (2)( 3) + (6)(4) (2)(3)+(-1)(2)+(3)(6) ( 1)(3)+(5)(2)+( 3)(6) (3)(3)+( 3)(2)+(4)(6) 27 (22, 11, 27) symmetric matrix 104
and Mathematical Statistics Gerold Jäger 9:00-15:00 T Compute the following matrix
 Umeå University Exam in mathematics Department of Mathematics Linear algebra and Mathematical Statistics 2012-02-24 Gerold Jäger 9:00-15:00 T ( ) 1 1 2 5 4 1. Compute the following matrix 7 8 (2 p) 2 3
Umeå University Exam in mathematics Department of Mathematics Linear algebra and Mathematical Statistics 2012-02-24 Gerold Jäger 9:00-15:00 T ( ) 1 1 2 5 4 1. Compute the following matrix 7 8 (2 p) 2 3
Isometries of the plane
 Isometries of the plane Mikael Forsberg August 23, 2011 Abstract Här följer del av ett dokument om Tesselering som jag skrivit för en annan kurs. Denna del handlar om isometrier och innehåller bevis för
Isometries of the plane Mikael Forsberg August 23, 2011 Abstract Här följer del av ett dokument om Tesselering som jag skrivit för en annan kurs. Denna del handlar om isometrier och innehåller bevis för
POSTKODVINSTER á 1.000 kronor Inom nedanstående postkoder vinner följande 234 lottnummer 1.000 kronor vardera:
 Dragningsresultat vecka 04-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Dragningsresultat vecka 04-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Lösningsförslag obs. preliminärt, reservation för fel
 Lösningsförslag obs. preliminärt, reservation för fel v0.4, augusti 04 Högskolan i Skövde (SK) Tentamen i matematik Kurs: MA4G Linjär algebra MAG Linjär algebra för ingenjörer Tentamensdag: 04-03-08 kl
Lösningsförslag obs. preliminärt, reservation för fel v0.4, augusti 04 Högskolan i Skövde (SK) Tentamen i matematik Kurs: MA4G Linjär algebra MAG Linjär algebra för ingenjörer Tentamensdag: 04-03-08 kl
Mekanik FK2002m. Vektorer
 Mekanik FK2002m Föreläsning 2 Vektorer 2013-09-02 Sara Strandberg SARA STRANDBERG P. 1 FÖRELÄSNING 2 Introduktion Förra gången pratade vi om rörelse i en dimension. När vi går till flera dimensioner behöver
Mekanik FK2002m Föreläsning 2 Vektorer 2013-09-02 Sara Strandberg SARA STRANDBERG P. 1 FÖRELÄSNING 2 Introduktion Förra gången pratade vi om rörelse i en dimension. När vi går till flera dimensioner behöver
1. Compute the following matrix: (2 p) 2. Compute the determinant of the following matrix: (2 p)
 2. Compute the determinant of the following matrix: (2 p)") UMEÅ UNIVERSITY Department of Mathematics and Mathematical Statistics Pre-exam in mathematics Linear algebra 2012-02-07 1. Compute the following matrix: (2 p 3 1 2 3 2 2 7 ( 4 3 5 2 2. Compute the determinant
UMEÅ UNIVERSITY Department of Mathematics and Mathematical Statistics Pre-exam in mathematics Linear algebra 2012-02-07 1. Compute the following matrix: (2 p 3 1 2 3 2 2 7 ( 4 3 5 2 2. Compute the determinant
Affina avbildningar och vektorgrafik
 och vektorgrafik 2010-02-04 och vektorgrafik Affin avbildning som matriser Definition En affin avbildning f är en sammansättning av en linjär avbildning x Bx och en translation x x + c och är alltid på
och vektorgrafik 2010-02-04 och vektorgrafik Affin avbildning som matriser Definition En affin avbildning f är en sammansättning av en linjär avbildning x Bx och en translation x x + c och är alltid på
the standard scalar product, i.e. L E 4. Find the orthogonal projection of the vector w = (2, 1, 2, 1) on the orthogonal complement L of L (where
 on the orthogonal complement L of L (where") MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MMA9 Linear Algebra Date: 05-0-6 Write time:
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MMA9 Linear Algebra Date: 05-0-6 Write time:
Repetition + lite av varje. Ulf Assarsson Department of Computer Engineering Chalmers University of Technology
 Repetition + lite av varje Ulf Assarsson Department of Computer Engineering Chalmers University of Technology Tävlingen Tävling: 22:a maj 15:00-17:00 i sal EA Anmäl ert lag om ni vill vara med. Skicka
Repetition + lite av varje Ulf Assarsson Department of Computer Engineering Chalmers University of Technology Tävlingen Tävling: 22:a maj 15:00-17:00 i sal EA Anmäl ert lag om ni vill vara med. Skicka
Grafiska pipelinen. Edvin Fischer
 Grafiska pipelinen Edvin Fischer Sammanfattning Rapporten behandlar den grafiska pipelinen och dess steg, vilka stegen är och hur de funkar. Inledning Rapporten har till syfte att beskriva hur den grafiska
Grafiska pipelinen Edvin Fischer Sammanfattning Rapporten behandlar den grafiska pipelinen och dess steg, vilka stegen är och hur de funkar. Inledning Rapporten har till syfte att beskriva hur den grafiska
Mekanik FK2002m. Kinematik i flera dimensioner
 Mekanik FK2002m Föreläsning 3 Kinematik i flera dimensioner 2013-09-04 Sara Strandberg SARA STRANDBERG P. 1 FÖRELÄSNING 2 Introduktion Nu har vi gått igenom: - Kinematik i en dimension - Vektorer i två
Mekanik FK2002m Föreläsning 3 Kinematik i flera dimensioner 2013-09-04 Sara Strandberg SARA STRANDBERG P. 1 FÖRELÄSNING 2 Introduktion Nu har vi gått igenom: - Kinematik i en dimension - Vektorer i två
Tentamen i Matematik 3: M0031M.
 Tentamen i Matematik 3: M0031M. Datum: 2009-10-26 Skrivtid: 09:00 14:00 Antal uppgifter: 6 ( 30 poäng ). Jourhavande lärare: Norbert Euler Telefon: 0920-492878 Tillåtna hjälpmedel: Inga Till alla uppgifterna
Tentamen i Matematik 3: M0031M. Datum: 2009-10-26 Skrivtid: 09:00 14:00 Antal uppgifter: 6 ( 30 poäng ). Jourhavande lärare: Norbert Euler Telefon: 0920-492878 Tillåtna hjälpmedel: Inga Till alla uppgifterna
Shaders. Gustav Taxén
 Shaders Gustav Taxén gustavt@csc.kth.se 2D1640 Grafik och Interaktionsprogrammering VT 2007 Shading l 2 P l 1 n v Givet en punkt P på en yta, en normal n, riktningsvektorer l i mot ljuskällor och en kamerariktning
Shaders Gustav Taxén gustavt@csc.kth.se 2D1640 Grafik och Interaktionsprogrammering VT 2007 Shading l 2 P l 1 n v Givet en punkt P på en yta, en normal n, riktningsvektorer l i mot ljuskällor och en kamerariktning
POSTKODVINSTER á 1.000 kronor Inom nedanstående postkoder vinner följande 307 lottnummer 1.000 kronor vardera:
 Dragningsresultat vecka 05-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Dragningsresultat vecka 05-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
8 < x 1 + x 2 x 3 = 1, x 1 +2x 2 + x 4 = 0, x 1 +2x 3 + x 4 = 2. x 1 2x 12 1A är inverterbar, och bestäm i så fall dess invers.
 MÄLARDALENS HÖGSKOLA Akademin för utbildning, kultur och kommunikation Avdelningen för tillämpad matematik Examinator: Erik Darpö TENTAMEN I MATEMATIK MAA150 Vektoralgebra TEN1 Datum: 9januari2015 Skrivtid:
MÄLARDALENS HÖGSKOLA Akademin för utbildning, kultur och kommunikation Avdelningen för tillämpad matematik Examinator: Erik Darpö TENTAMEN I MATEMATIK MAA150 Vektoralgebra TEN1 Datum: 9januari2015 Skrivtid:
Information från Medborgarkontoret Hösten 2013
 E ö hö ö! DENNA SIDA ÄR EN ANNONS G Im M Hö 2013 M G Yv P ch U Bjöm ö m ö G. M m hö! Å F ä! Ö ö M G M... 13-18 T... 13-16 O... 13-16 T... 13-18 m ä ä. A: Hcv. 1, 247 70 G T: 046-35 63 57 Fx: 046-35 70
E ö hö ö! DENNA SIDA ÄR EN ANNONS G Im M Hö 2013 M G Yv P ch U Bjöm ö m ö G. M m hö! Å F ä! Ö ö M G M... 13-18 T... 13-16 O... 13-16 T... 13-18 m ä ä. A: Hcv. 1, 247 70 G T: 046-35 63 57 Fx: 046-35 70
, m 3 = 3. Determine for each real α and for each real β 0 the geometric meaning of the equation x 2 + 2y 2 + αz 2 + 2xz 4yz = β.
 MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MMA9 Linear Algebra Date: 05-06-0 Write time:
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MMA9 Linear Algebra Date: 05-06-0 Write time:
1. Find for each real value of a, the dimension of and a basis for the subspace
 MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA53 Linear Algebra Date: 208-0-09 Write
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA53 Linear Algebra Date: 208-0-09 Write
and u = och x + y z 2w = 3 (a) Finn alla lösningar till ekvationssystemet
 Finn alla lösningar till ekvationssystemet") Kursen bedöms med betyg,, 5 eller underkänd, där 5 är högsta betyg. För godkänt betyg krävs minst poäng från uppgifterna -7. Var och en av dessa sju uppgifter kan ge maximalt poäng. För var och en av uppgifterna
Kursen bedöms med betyg,, 5 eller underkänd, där 5 är högsta betyg. För godkänt betyg krävs minst poäng från uppgifterna -7. Var och en av dessa sju uppgifter kan ge maximalt poäng. För var och en av uppgifterna
Tentamen i Matematik 2: M0030M.
 Tentamen i Matematik 2: M0030M. Datum: 2010-01-12 Skrivtid: 09:00 14:00 Antal uppgifter: 6 ( 30 poäng ). Jourhavande lärare: Norbert Euler Telefon: 0920-492878 Tillåtna hjälpmedel: Inga Till alla uppgifterna
Tentamen i Matematik 2: M0030M. Datum: 2010-01-12 Skrivtid: 09:00 14:00 Antal uppgifter: 6 ( 30 poäng ). Jourhavande lärare: Norbert Euler Telefon: 0920-492878 Tillåtna hjälpmedel: Inga Till alla uppgifterna
c d Z = och W = b a d c för några reella tal a, b, c och d. Vi har att a + c (b + d) b + d a + c ac bd ( ad bc)
 b + d a + c ac bd ( ad bc)") 1 Komplexa tal 11 De reella talen De reella talen skriver betecknas ofta med symbolen R Vi vill inte definiera de reella talen här, men vi noterar att för varje tal a och b har vi att a + b och att ab
1 Komplexa tal 11 De reella talen De reella talen skriver betecknas ofta med symbolen R Vi vill inte definiera de reella talen här, men vi noterar att för varje tal a och b har vi att a + b och att ab
1. Find an equation for the line λ which is orthogonal to the plane
 MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA150 Vector Algebra, TEN1 Date: 2018-04-23
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA150 Vector Algebra, TEN1 Date: 2018-04-23
2. Let the linear space which is spanned by the functions p 1, p 2, p 3, where p k (x) = x k, be equipped with the inner product p q = 1
 = x k, be equipped with the inner product p q = 1") MÄLARDALEN UNIVERSIY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINAION IN MAHEMAICS MAA15 Linear Algebra Date: 017-06-09 Write time:
MÄLARDALEN UNIVERSIY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINAION IN MAHEMAICS MAA15 Linear Algebra Date: 017-06-09 Write time:
1. Find the 4-tuples (a, b, c, d) that solves the system of linear equations
 that solves the system of linear equations") MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA150 Vector Algebra, TEN1 Date: 2018-02-15
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA150 Vector Algebra, TEN1 Date: 2018-02-15
Koordinatsystem och Navigation
 2D vs 3D VS Skillnaden mellan 2D och 3D må verka ganska självklar men ibland kan det uppkomma missförstånd kring detta. Vi refererar oftast på 3D som datorgenererad grafik (CG=Computer Graphics) vilket
2D vs 3D VS Skillnaden mellan 2D och 3D må verka ganska självklar men ibland kan det uppkomma missförstånd kring detta. Vi refererar oftast på 3D som datorgenererad grafik (CG=Computer Graphics) vilket
VECKANS LILLA POSTKODVINST á 1.000 kronor Inom nedanstående postkoder vinner följande 245 lottnummer 1.000 kronor vardera:
 Dragningsresultat vecka 42-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Dragningsresultat vecka 42-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Kort introduktion till Matlab och användbara kommandon i TSFS06
 Kort introduktion till Matlab och användbara kommandon i TSFS06 Erik Frisk 4 april 2011 Kursen förutsätter en viss förtrogenhet med Matlab. I det här dokumentet exemplifieras några vanliga kommandon som
Kort introduktion till Matlab och användbara kommandon i TSFS06 Erik Frisk 4 april 2011 Kursen förutsätter en viss förtrogenhet med Matlab. I det här dokumentet exemplifieras några vanliga kommandon som
is introduced. Determine the coefficients a ij in the expression for, knowing that the vectors (1, 0, 1), (1, 1, 1), (0, 1, 1) constitute an ON-basis.
, (1, 1, 1), (0, 1, 1) constitute an ON-basis.") MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MMA19 Linear Algebra Date: 015-08-1 Write
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MMA19 Linear Algebra Date: 015-08-1 Write
For which values of α is the dimension of the subspace U V not equal to zero? Find, for these values of α, a basis for U V.
 MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA53 Linear Algebra Date: 07-08-6 Write time:
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA53 Linear Algebra Date: 07-08-6 Write time:
Shaders. Renderingssystem. Renderingssystem. Renderingssystem. Hårdvara för 3D-rendering. Hårdvara för 3D-rendering
 Shaders Renderingssystem Applikation Geometri Rastrering Martin Fitger d00-mfi@d.kth.se VT 2008, DH2323 / DH2640 / NA8740 Renderingssystem Renderingssystem Applikation Per-vertex operationer Geometri Rastrering
Shaders Renderingssystem Applikation Geometri Rastrering Martin Fitger d00-mfi@d.kth.se VT 2008, DH2323 / DH2640 / NA8740 Renderingssystem Renderingssystem Applikation Per-vertex operationer Geometri Rastrering
MMA129 Linear Algebra academic year 2015/16
 MMA129 Linear Algebra academic year 2015/16 Assigned problems Set 1 (4) Vector spaces 1. Which of the sets equipped with the operations addition and scalar multiplication M a = {(x 1 x 2 ) R 2 : 3x 1 2x
MMA129 Linear Algebra academic year 2015/16 Assigned problems Set 1 (4) Vector spaces 1. Which of the sets equipped with the operations addition and scalar multiplication M a = {(x 1 x 2 ) R 2 : 3x 1 2x
Tentamen i Matematik 2: M0030M.
 Tentamen i Matematik 2: M0030M. Datum: 203-0-5 Skrivtid: 09:00 4:00 Antal uppgifter: 2 ( 30 poäng ). Examinator: Norbert Euler Tel: 0920-492878 Tillåtna hjälpmedel: Inga Betygsgränser: 4p 9p = 3; 20p 24p
Tentamen i Matematik 2: M0030M. Datum: 203-0-5 Skrivtid: 09:00 4:00 Antal uppgifter: 2 ( 30 poäng ). Examinator: Norbert Euler Tel: 0920-492878 Tillåtna hjälpmedel: Inga Betygsgränser: 4p 9p = 3; 20p 24p
VECKANS LILLA POSTKODVINST á 1.000 kronor Inom nedanstående postkoder vinner följande 249 lottnummer 1.000 kronor vardera:
 Dragningsresultat vecka 10-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Dragningsresultat vecka 10-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Kursinformation i Partikeldynamik för M (TMME08)
") Kursinformation i Partikeldynamik för M (TMME08) 18h föreläsningar, 6h lektioner och h datorlaboration i period VT, 009. Kurshemsida www.mechanics.iei.liu.se/edu ug/tmme08/ Föreläsare och examinator Jonas
Kursinformation i Partikeldynamik för M (TMME08) 18h föreläsningar, 6h lektioner och h datorlaboration i period VT, 009. Kurshemsida www.mechanics.iei.liu.se/edu ug/tmme08/ Föreläsare och examinator Jonas
Information Coding / Computer Graphics, ISY, LiTH. Bump mapping!
 42(81) Information Coding / Computer Graphics, ISY, LiTH Bump mapping Principerna ingick i grundkursen. Mer detalj, implementation Koordinatsystem Normal mapping Utvidgning till mer avancerade metoder
42(81) Information Coding / Computer Graphics, ISY, LiTH Bump mapping Principerna ingick i grundkursen. Mer detalj, implementation Koordinatsystem Normal mapping Utvidgning till mer avancerade metoder
MATEMATISK FORMELSAMLING
 Avdelningen för ämnesdidaktik och matematik (DMA) Avdelningen för kvalitetsteknik, maskinteknik och matematik (KMM) MATEMATISK FORMELSAMLING UPPLAGA 4 Innehåll Notation, mängdlära och logik........................
Avdelningen för ämnesdidaktik och matematik (DMA) Avdelningen för kvalitetsteknik, maskinteknik och matematik (KMM) MATEMATISK FORMELSAMLING UPPLAGA 4 Innehåll Notation, mängdlära och logik........................
is a basis for M. Also, find the coordinates of the matrix M = with respect to the basis M 1, M 2, M 3.
 MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA53 Linear Algebra Date: 6-8-7 Write time:
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA53 Linear Algebra Date: 6-8-7 Write time:
TBSK03 Teknik för avancerade Datorspel. Jens Ogniewski Information Coding Group Linköpings universitet
 TBSK03 Teknik för avancerade Datorspel Jens Ogniewski Information Coding Group Linköpings universitet Representation av rotation Eulervinklar Y = Ryaw Rpitch Rroll X Intuitivt, fast svårt att göra Interpolation
TBSK03 Teknik för avancerade Datorspel Jens Ogniewski Information Coding Group Linköpings universitet Representation av rotation Eulervinklar Y = Ryaw Rpitch Rroll X Intuitivt, fast svårt att göra Interpolation
och v = 1 och vektorn Svar 11x 7y + z 2 = 0 Enligt uppgiftens information kan vi ta vektorerna 3x + 2y + 2z = 1 y z = 1 6x + 6y + 2z = 4
 Kursen bedöms med betyg, 4, eller underkänd, där är högsta betyg. För godkänt betyg krävs minst 4 poäng från uppgifterna -7. Var och en av dessa sju uppgifter kan ge maximalt poäng. För var och en av uppgifterna
Kursen bedöms med betyg, 4, eller underkänd, där är högsta betyg. För godkänt betyg krävs minst 4 poäng från uppgifterna -7. Var och en av dessa sju uppgifter kan ge maximalt poäng. För var och en av uppgifterna
12.6 Heat equation, Wave equation
 12.6 Heat equation, 12.2-3 Wave equation Eugenia Malinnikova, NTNU September 26, 2017 1 Heat equation in higher dimensions The heat equation in higher dimensions (two or three) is u t ( = c 2 2 ) u x 2
12.6 Heat equation, 12.2-3 Wave equation Eugenia Malinnikova, NTNU September 26, 2017 1 Heat equation in higher dimensions The heat equation in higher dimensions (two or three) is u t ( = c 2 2 ) u x 2
. Bestäm Rez och Imz. i. 1. a) Låt z = 1+i ( b) Bestäm inversen av matrisen A = (3p) x + 3y + 4z = 5, 3x + 2y + 7z = 3, 2x y + z = 4.
 Låt z = 1+i ( b) Bestäm inversen av matrisen A = (3p) x + 3y + 4z = 5, 3x + 2y + 7z = 3, 2x y + z = 4.") MÄLARDALENS HÖGSKOLA Akademin för utbildning, kultur och kommunikation Avdelningen för tillämpad matematik Examinator: Erik Darpö TENTAMEN I MATEMATIK MAA150 Vektoralgebra TEN1 Datum: 3 oktober 2014 Skrivtid:
MÄLARDALENS HÖGSKOLA Akademin för utbildning, kultur och kommunikation Avdelningen för tillämpad matematik Examinator: Erik Darpö TENTAMEN I MATEMATIK MAA150 Vektoralgebra TEN1 Datum: 3 oktober 2014 Skrivtid:
Kompletteringskompendium
 Kompletteringskompendium Tomas Ekholm Institutionen för matematik Innehåll 0 Notationer och inledande logik 3 0.1 Talmängder............................ 3 0. Utsagor.............................. 3 1 Induktion
Kompletteringskompendium Tomas Ekholm Institutionen för matematik Innehåll 0 Notationer och inledande logik 3 0.1 Talmängder............................ 3 0. Utsagor.............................. 3 1 Induktion
denna del en poäng. 1. (Dugga 1.1) och v = (a) Beräkna u (2u 2u v) om u = . (1p) och som är parallell
 och v = (a) Beräkna u (2u 2u v) om u = . (1p) och som är parallell") Kursen bedöms med betyg, 4, 5 eller underänd, där 5 är högsta betyg. För godänt betyg rävs minst 4 poäng från uppgifterna -7. Var och en av dessa sju uppgifter an ge maximalt poäng. För var och en av uppgifterna
Kursen bedöms med betyg, 4, 5 eller underänd, där 5 är högsta betyg. För godänt betyg rävs minst 4 poäng från uppgifterna -7. Var och en av dessa sju uppgifter an ge maximalt poäng. För var och en av uppgifterna
Geometriska transformationer
 CTH/GU LABORATION 5 TMV6/MMGD - 7/8 Matematiska vetenskaper Inledning Geometriska transformationer Vi skall se på några geometriska transformationer; rotation, skalning, translation, spegling och projektion.
CTH/GU LABORATION 5 TMV6/MMGD - 7/8 Matematiska vetenskaper Inledning Geometriska transformationer Vi skall se på några geometriska transformationer; rotation, skalning, translation, spegling och projektion.
for M, the matrix of the linear transformation F : R 3 M defined as x1 + x F ((x 1, x 2, x 3 )) = 2 + x 3 2x 1 + x 2 + 3x 3
) = 2 + x 3 2x 1 + x 2 + 3x 3") MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA15 Linear Algebra Date: 2017-01-09 Write
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA15 Linear Algebra Date: 2017-01-09 Write
DICOM MPPS/dos- SR Vad gäller?
 DICOM MPPS/dos- SR Vad gäller? Jonathan Kruger Röntgenveckan, Umeå 2011-09-15 Jämförelse MPPS RDSR Olika funktionalitet med viss överlapp gällande patientstråldoser MPPS i korthet modality performed procedure
DICOM MPPS/dos- SR Vad gäller? Jonathan Kruger Röntgenveckan, Umeå 2011-09-15 Jämförelse MPPS RDSR Olika funktionalitet med viss överlapp gällande patientstråldoser MPPS i korthet modality performed procedure
UPPSALA UNIVERSITET Matematiska institutionen Michael Melgaard. Prov i matematik Prog: Datakand., Frist. kurser Derivator o integraler 1MA014
 UPPSALA UNIVERSITET Matematiska institutionen Michael Melgaard Jörgen Östensson Prov i matematik Prog: Datakand., Frist. kurser Derivator o integraler 1MA1 8 3 31 Skrivtid: 8: 13:. Tillåtna hjälpmedel:
UPPSALA UNIVERSITET Matematiska institutionen Michael Melgaard Jörgen Östensson Prov i matematik Prog: Datakand., Frist. kurser Derivator o integraler 1MA1 8 3 31 Skrivtid: 8: 13:. Tillåtna hjälpmedel:
DEL I 15 poäng totalt inklusive bonus poäng.
 Matematiska Institutionen KTH TENTAMEN i Linjär algebra, SF604, den 5 december, 2009. Kursexaminator: Sandra Di Rocco Svaret skall motiveras och lösningen skrivas ordentligt och klart. Inga hjälpmedel
Matematiska Institutionen KTH TENTAMEN i Linjär algebra, SF604, den 5 december, 2009. Kursexaminator: Sandra Di Rocco Svaret skall motiveras och lösningen skrivas ordentligt och klart. Inga hjälpmedel
Moment 4.11 Viktiga exempel 4.32, 4.33 Övningsuppgifter Ö4.18-Ö4.22, Ö4.30-Ö4.34. Planet Ett plan i rummet är bestämt då
 Moment 4.11 Viktiga exempel 4.32, 4.33 Övningsuppgifter Ö4.18-Ö4.22, Ö4.30-Ö4.34 Planet Ett plan i rummet är bestämt då två icke parallella riktningar, v 1 och v 2, och en punkt P 1 i planet är givna.
Moment 4.11 Viktiga exempel 4.32, 4.33 Övningsuppgifter Ö4.18-Ö4.22, Ö4.30-Ö4.34 Planet Ett plan i rummet är bestämt då två icke parallella riktningar, v 1 och v 2, och en punkt P 1 i planet är givna.
Transformationer i 3D. Gustav Taxén
 Transformationer i 3D Gustav Taén gustavt@csc.kth.se 2D64 Grafik och Interaktionsprogrammering VT 27 Bakgrund Ett smidigt sätt att arbeta med 3D-grafik är att tänka sig att man har en virtuell kamera som
Transformationer i 3D Gustav Taén gustavt@csc.kth.se 2D64 Grafik och Interaktionsprogrammering VT 27 Bakgrund Ett smidigt sätt att arbeta med 3D-grafik är att tänka sig att man har en virtuell kamera som
Grunderna i C++ T A. Skapad av Matz Johansson BergströmLIMY
 Grunderna i C++ ARK 385: Virtuella Verktyg i en Materiell värld AT Arkitektur & Teknik Chalmers Tekniska Högskola 2009 - Kursen skapades (3 förel.) 2010-6 förel. + 2 projekt 2011-8 förel. Helt omarbetade
Grunderna i C++ ARK 385: Virtuella Verktyg i en Materiell värld AT Arkitektur & Teknik Chalmers Tekniska Högskola 2009 - Kursen skapades (3 förel.) 2010-6 förel. + 2 projekt 2011-8 förel. Helt omarbetade
3.995. drinkrecept från MATgeek på elon.se
 Lå c P c L j T b å S Hå P0860E/107427 S c å MT å. T K C- ö å c å å E: 2000 w ORD PRIS 599 399 ORD PRIS 999 599 ORD PRIS 1.195 899 R S5110/06 + T1150/10/107283 T Mx ESB5400BK/105158 T j 5 c E: 700 w, c:
Lå c P c L j T b å S Hå P0860E/107427 S c å MT å. T K C- ö å c å å E: 2000 w ORD PRIS 599 399 ORD PRIS 999 599 ORD PRIS 1.195 899 R S5110/06 + T1150/10/107283 T Mx ESB5400BK/105158 T j 5 c E: 700 w, c:
2 Funktioner från R n till R m, linjära, inversa och implicita funktioner
 Nr, feb -5, Amelia Funktioner från R n till R m, linjära, inversa och implicita funktioner.1 Funktioner från R n till R m Vi har i tidigare föreläsningar sett olika tolkningar av funktioner från R n till
Nr, feb -5, Amelia Funktioner från R n till R m, linjära, inversa och implicita funktioner.1 Funktioner från R n till R m Vi har i tidigare föreläsningar sett olika tolkningar av funktioner från R n till
Homogena koordinater och datorgrafik
 Linjär algebra, AT3 2011/2012 Matematiska vetenskaper Inledning Homogena koordinater och datorgrafik Vi såg tidigare på några geometriska transformationer; rotation, skalning, translation och projektion.
Linjär algebra, AT3 2011/2012 Matematiska vetenskaper Inledning Homogena koordinater och datorgrafik Vi såg tidigare på några geometriska transformationer; rotation, skalning, translation och projektion.
Linjär algebra. Föreläsningar: Lektioner: Laborationer:
 Linjär algebra Föreläsningar: 08.15-10.00 Lektioner: 10.30-12.00 Laborationer: 13.15-16.00 Datum Sal Kapitel Må 1/9 Hörsal D 1.1-1.2 Ekvationssystem To 4 D 1.3-1.4 Matriser Lektion MA136, 146, 156, MC313
Linjär algebra Föreläsningar: 08.15-10.00 Lektioner: 10.30-12.00 Laborationer: 13.15-16.00 Datum Sal Kapitel Må 1/9 Hörsal D 1.1-1.2 Ekvationssystem To 4 D 1.3-1.4 Matriser Lektion MA136, 146, 156, MC313
VECKANS LILLA POSTKODVINST á 1.000 kronor Inom nedanstående postkoder vinner följande 270 lottnummer 1.000 kronor vardera:
 Dragningsresultat vecka 14-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Dragningsresultat vecka 14-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
= = i K = 0, K =
 ösningsförslag till tentamensskrivning i SF1633, Differentialekvationer I Tisdagen den 14 augusti 212, kl 14-19 Hjälpmedel: BETA, Mathematics Handbook Redovisa lösningarna på ett sådant sätt att beräkningar
ösningsförslag till tentamensskrivning i SF1633, Differentialekvationer I Tisdagen den 14 augusti 212, kl 14-19 Hjälpmedel: BETA, Mathematics Handbook Redovisa lösningarna på ett sådant sätt att beräkningar
CS 664 Slides #7 Visual Motion. Prof. Dan Huttenlocher Fall 2003
 CS 664 Slides #7 Visual Motion Prof. Dan Huttenlocher Fall 2003 Visual Motion Over sequence of images can determine which pixels move where Differs from motion in the world Camera motion Pan, tilt, zoom
CS 664 Slides #7 Visual Motion Prof. Dan Huttenlocher Fall 2003 Visual Motion Over sequence of images can determine which pixels move where Differs from motion in the world Camera motion Pan, tilt, zoom
Linjära avbildningar. Låt R n vara mängden av alla vektorer med n komponenter, d.v.s. x 1 x 2. x = R n = x n
 Linjära avbildningar Låt R n vara mängden av alla vektorer med n komponenter, d.v.s. R n = { x = x x. x n } x, x,..., x n R. Vi räknar med vektorer x, y likandant som i planet och i rymden. vektorsumma:
Linjära avbildningar Låt R n vara mängden av alla vektorer med n komponenter, d.v.s. R n = { x = x x. x n } x, x,..., x n R. Vi räknar med vektorer x, y likandant som i planet och i rymden. vektorsumma:
Enhetsvektorer. Basvektorer i två dimensioner: 1 1 Basvektorer i tre dimensioner: Enhetsvektor i riktningen v: v v
 Vektoraddition u + v = u + v = [ ] u1 u 2 u 1 u 2 + u 3 + [ v1 v 2 ] = v 1 v 2 = v 3 [ u1 + v 1 u 2 + v 2 u 1 + v 1 u 2 + v 2 u 3 + v 3 ] Multiplikation med skalär α u = α [ u1 u 2 α u = α ] = u 1 u 2
Vektoraddition u + v = u + v = [ ] u1 u 2 u 1 u 2 + u 3 + [ v1 v 2 ] = v 1 v 2 = v 3 [ u1 + v 1 u 2 + v 2 u 1 + v 1 u 2 + v 2 u 3 + v 3 ] Multiplikation med skalär α u = α [ u1 u 2 α u = α ] = u 1 u 2
4 McLaurin- och Taylorpolynom
 Nr 4, 28 feb, Amelia 2 4 McLaurin- och Taylorpolynom 4. Repetition av Taylorpolynom i en variabel 4.. Förbättring av tangenten Detta avsnitt handlar om de grundläggande idéerna för Taylorpolynom i en variabel.
Nr 4, 28 feb, Amelia 2 4 McLaurin- och Taylorpolynom 4. Repetition av Taylorpolynom i en variabel 4.. Förbättring av tangenten Detta avsnitt handlar om de grundläggande idéerna för Taylorpolynom i en variabel.
VECKANS LILLA POSTKODVINST á 1.000 kronor Inom nedanstående postkoder vinner följande 229 lottnummer 1.000 kronor vardera:
 Dragningsresultat vecka 37-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Dragningsresultat vecka 37-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Gaussiska primtal. Christer Kiselman. Institut Mittag-Leffler & Uppsala universitet
 195 Gaussiska primtal Christer Kiselman Institut Mittag-Leffler & Uppsala universitet 1. Beskrivning av uppgiften. De förslag som presenteras här kan behandlas på flera olika sätt. Ett första syfte är
195 Gaussiska primtal Christer Kiselman Institut Mittag-Leffler & Uppsala universitet 1. Beskrivning av uppgiften. De förslag som presenteras här kan behandlas på flera olika sätt. Ett första syfte är
VECKANS SMÅVINSTER - POSTKOD, 500 kronor vanns av följande postkoder:
 Dragningsresultat den 19 juni Här nedan kan du se om du är en av de lyckliga vinnarna i månadens utlottning av vinsterna i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar
Dragningsresultat den 19 juni Här nedan kan du se om du är en av de lyckliga vinnarna i månadens utlottning av vinsterna i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar
Kursinformation. Matematiska metoder i nationalekonomi 730G77 Linnea Ingebrand
 Kursinformation Kursbeskrivning och syfte Det huvudsakliga syftet med kursen är att den studerande skall få kunskap om och själv kunna använda sig av de matematiska metoder som används för att lösa jämvikts-
Kursinformation Kursbeskrivning och syfte Det huvudsakliga syftet med kursen är att den studerande skall få kunskap om och själv kunna använda sig av de matematiska metoder som används för att lösa jämvikts-
(D1.1) 1. (3p) Bestäm ekvationer i ett xyz-koordinatsystem för planet som innehåller punkterna
 1. (3p) Bestäm ekvationer i ett xyz-koordinatsystem för planet som innehåller punkterna") Högsolan i Sövde (SK) Tentamen i matemati Kurs: MA4G Linjär algebra MAG Linjär algebra för ingenjörer Tentamensdag: 4-8-6 l 4.-9. Hjälpmedel : Inga hjälpmedel utöver bifogat formelblad. Ej ränedosa. Tentamen
Högsolan i Sövde (SK) Tentamen i matemati Kurs: MA4G Linjär algebra MAG Linjär algebra för ingenjörer Tentamensdag: 4-8-6 l 4.-9. Hjälpmedel : Inga hjälpmedel utöver bifogat formelblad. Ej ränedosa. Tentamen
Läsanvisningar och övningsuppgifter i MAA150, period vt Erik Darpö
 Läsanvisningar och övningsuppgifter i MAA150, period vt1 2015 Erik Darpö ii 0. Förberedelser Nedanstående uppgifter är avsedda att användas som ett självdiagnostiskt test. Om du har problem med att lösa
Läsanvisningar och övningsuppgifter i MAA150, period vt1 2015 Erik Darpö ii 0. Förberedelser Nedanstående uppgifter är avsedda att användas som ett självdiagnostiskt test. Om du har problem med att lösa
5 Linjär algebra. 5.1 Addition av matriser 5 LINJÄR ALGEBRA
 5 LINJÄR ALGEBRA 5 Linjär algebra En kul gren av matematiken som inte fått speciellt mycket utrymme i gymnasiet men som har många tillämpningsområden inom t.ex. fysik, logistik, ekonomi, samhällsplanering
5 LINJÄR ALGEBRA 5 Linjär algebra En kul gren av matematiken som inte fått speciellt mycket utrymme i gymnasiet men som har många tillämpningsområden inom t.ex. fysik, logistik, ekonomi, samhällsplanering
AL State Rankings. AK State Rankings
 AL State ings 1 TEAM ALABAMA AL-V-S-349 10 1 TEAM ALABAMA AL-V-C-350 4 AK State ings AZ State ings 1 Biohazard (TS) AZ-V-S-037 15 1 Biohazard (CW) AZ-V-C-040 18 2 L.I.T. FC (TS) AZ-V-S-038 10 2 L.I.T.
AL State ings 1 TEAM ALABAMA AL-V-S-349 10 1 TEAM ALABAMA AL-V-C-350 4 AK State ings AZ State ings 1 Biohazard (TS) AZ-V-S-037 15 1 Biohazard (CW) AZ-V-C-040 18 2 L.I.T. FC (TS) AZ-V-S-038 10 2 L.I.T.
0 2,5 5 7,5 10km Map: Översikt m avståndsringar, Print scale 1: , Map center RN East: North:
 VAB_2013-12-04 VISUAL - Map Calculation: EIA LA N117 HH141m disph 3,5m WindPRO version 2.8.579 Dec 2012 Printed/Page 2013-12-10 15:22 / 1 Licensed user: Calculated: 2013-12-10 15:20/2.8.579 0 2,5 5 7,5
VAB_2013-12-04 VISUAL - Map Calculation: EIA LA N117 HH141m disph 3,5m WindPRO version 2.8.579 Dec 2012 Printed/Page 2013-12-10 15:22 / 1 Licensed user: Calculated: 2013-12-10 15:20/2.8.579 0 2,5 5 7,5
Repetition C-programmering
 Repetition C-programmering Viktor Kämpe C Historik Utvecklades först 1969 1973 av Dennis Ritchcie vid AT&T Bell Labs. Högnivå språk med kontakt mot maskinvara. Ett utav de mest använda språken. Repetition
Repetition C-programmering Viktor Kämpe C Historik Utvecklades först 1969 1973 av Dennis Ritchcie vid AT&T Bell Labs. Högnivå språk med kontakt mot maskinvara. Ett utav de mest använda språken. Repetition
2D-grafik. Gustav Taxén
 2D-grafik Gustav Taxén gustavt@csc.kth.se 2D164 Grafik och Interaktionsprogrammering VT 27 Framebuffer Datorminne som lagrar information för pixlarna som ska visas på skärmen Grafikkortet hämtar värdena
2D-grafik Gustav Taxén gustavt@csc.kth.se 2D164 Grafik och Interaktionsprogrammering VT 27 Framebuffer Datorminne som lagrar information för pixlarna som ska visas på skärmen Grafikkortet hämtar värdena
ett uttryck för en våg som beskrivs av Jonesvektorn: 2
 Tentamen i Vågrörelselära(FK49) Datum: Tisdag, 6 Juni, 29, Tid: 9: - 5: Tillåten Hjälp: Physics handbook eller dylikt Förklara resonemang och uträkningar klart och tydligt. Tentamensskrivningen består
Tentamen i Vågrörelselära(FK49) Datum: Tisdag, 6 Juni, 29, Tid: 9: - 5: Tillåten Hjälp: Physics handbook eller dylikt Förklara resonemang och uträkningar klart och tydligt. Tentamensskrivningen består
Plan: M0030M, LP2, 2017
 Plan: M0030M, LP2, 2017 Examiner: Norbert Euler, Division of Mathematics, TVM, LTU. Course Literature: R A Adams and C Essex (hereafter referred to as A&E) Calculus, 9-th Edition. D C Lay, S R Lay and
Plan: M0030M, LP2, 2017 Examiner: Norbert Euler, Division of Mathematics, TVM, LTU. Course Literature: R A Adams and C Essex (hereafter referred to as A&E) Calculus, 9-th Edition. D C Lay, S R Lay and
ASSEMBLY INSTRUCTIONS SCALE SQUARE - STANDARD
 ASSEMBLY INSTRUCTIONS ALL COMPONENTS Metal profile 0 mm Gripper Ceiling attachments Screws for ceiling attachements (not included) Wires Metal profile 60 mm Metal profile 00 mm Felt - Full Felt - Half
ASSEMBLY INSTRUCTIONS ALL COMPONENTS Metal profile 0 mm Gripper Ceiling attachments Screws for ceiling attachements (not included) Wires Metal profile 60 mm Metal profile 00 mm Felt - Full Felt - Half
Pre-Test 1: M0030M - Linear Algebra.
 Pre-Test : M3M - Linear Algebra. Test your knowledge on Linear Algebra for the course M3M by solving the problems in this test. It should not take you longer than 9 minutes. M3M Problem : Betrakta fyra
Pre-Test : M3M - Linear Algebra. Test your knowledge on Linear Algebra for the course M3M by solving the problems in this test. It should not take you longer than 9 minutes. M3M Problem : Betrakta fyra
MA2047 Algebra och diskret matematik
 MA2047 Algebra och diskret matematik Något om heltal Mikael Hindgren 17 september 2018 Delbarhet Exempel 1 42 = 6 7 Vi säger: 7 är en faktor i 42 eller 7 delar 42 Vi skriver: 7 42 Definition 1 Om a, b
MA2047 Algebra och diskret matematik Något om heltal Mikael Hindgren 17 september 2018 Delbarhet Exempel 1 42 = 6 7 Vi säger: 7 är en faktor i 42 eller 7 delar 42 Vi skriver: 7 42 Definition 1 Om a, b
ax + y + 2z = 3 ay = b 3 (b 3) z = 0 har (a) entydig lösning, (b) oändligt många lösningar och (c) ingen lösning.
 z = 0 har (a) entydig lösning, (b) oändligt många lösningar och (c) ingen lösning.") UPPSALA UNIVERSITET Matematiska institutionen Anders Johansson Prov i matematik ES, Frist, KandMa LINJÄR ALGEBRA och GEOMETRI I 2010 10 21 Skrivtid: 8.00 13.00. Tillåtna hjälpmedel: Skrivdon. Lösningarna
UPPSALA UNIVERSITET Matematiska institutionen Anders Johansson Prov i matematik ES, Frist, KandMa LINJÄR ALGEBRA och GEOMETRI I 2010 10 21 Skrivtid: 8.00 13.00. Tillåtna hjälpmedel: Skrivdon. Lösningarna
Vektorer. Paraplyt, vektorn Vädret behöver dessa Blåser sin lovsång. 1. Vad är vektorer? Räkneregler för vektorer Vektorgeometri..
 Vektorer Paraplyt, vektorn Vädret behöver dessa Blåser sin lovsång 1. Vad är vektorer?...2 2. Räkneregler för vektorer..6 3. Vektorgeometri..15 Facit 19 Bilder: Geometriska konstruktioner och diagram av
Vektorer Paraplyt, vektorn Vädret behöver dessa Blåser sin lovsång 1. Vad är vektorer?...2 2. Räkneregler för vektorer..6 3. Vektorgeometri..15 Facit 19 Bilder: Geometriska konstruktioner och diagram av
UPG5 och UPG8 Miniprojekt 1: 2D datorgrafik
 UPG5 och UPG8 Miniprojekt 1: 2D datorgrafik I den här uppgiften studerar vi hur man kan använda sig av linjära avbildningar för att modifiera bilder i två dimensioner Mycket är repetition av vissa grundbegrepp
UPG5 och UPG8 Miniprojekt 1: 2D datorgrafik I den här uppgiften studerar vi hur man kan använda sig av linjära avbildningar för att modifiera bilder i två dimensioner Mycket är repetition av vissa grundbegrepp
Linjen P Q tangerar cirkeln i P och enligt en sats i geometrin är OP vinkelrät. tan u = OP. tan(180 v) = RS. cos v = sin v = tan v, tan v = RS.
 = RS. cos v = sin v = tan v, tan v = RS.") Lösningar till några övningar i Kap 1 i Vektorgeometri 17. I figuren är u en spetsig vinkel som vi har markerat i enhetscirkeln. Linjen P Q tangerar cirkeln i P och enligt en sats i geometrin är OP vinkelrät
Lösningar till några övningar i Kap 1 i Vektorgeometri 17. I figuren är u en spetsig vinkel som vi har markerat i enhetscirkeln. Linjen P Q tangerar cirkeln i P och enligt en sats i geometrin är OP vinkelrät
Medborgarnas synpunkter på skattesystemet, skattefusket och Skatteverkets kontroll Resultat från en riksomfattande undersökning hösten 2006
 M y å y, S R å ö ö 2006 R 2007:3 3 Fö S ö 1996 å ö å å ö. Uö ä å ä: Mä ( ä) ä. Mä ä å y y,, ä ä å y S ä. I å 2006 å ö ä y, (ä). D (ä) 2007:4, M y å S ä. Uö y : ö ö ä y S, ö ö ö å S,, ä ä å ä å y ö. Fä
M y å y, S R å ö ö 2006 R 2007:3 3 Fö S ö 1996 å ö å å ö. Uö ä å ä: Mä ( ä) ä. Mä ä å y y,, ä ä å y S ä. I å 2006 å ö ä y, (ä). D (ä) 2007:4, M y å S ä. Uö y : ö ö ä y S, ö ö ö å S,, ä ä å ä å y ö. Fä
Avalanche Studios. OpenGL. Vår teknik. Våra spel. Lite inspiration... Stora, öppna spelvärldar. Sandbox-gameplay. Hög audiovisuell standard
 OpenGL Avalanche Studios Sveriges ledande oberoende spelutvecklare Fokus på egenutvecklade IPn Finns på Söder i Stockholm ~6 anställda Just Cause för PS2, PC, XBox, och XBox 36 släpptes 26 Gustav Taxén
OpenGL Avalanche Studios Sveriges ledande oberoende spelutvecklare Fokus på egenutvecklade IPn Finns på Söder i Stockholm ~6 anställda Just Cause för PS2, PC, XBox, och XBox 36 släpptes 26 Gustav Taxén
Transformationer i R 2 och R 3
 Linjär algebra, I / Matematiska vetenskaper Inledning Transformationer i R och R 3 Vi skall se på några geometriska transformationer; rotation, skalning, translation och projektion. Rotation och skalning
Linjär algebra, I / Matematiska vetenskaper Inledning Transformationer i R och R 3 Vi skall se på några geometriska transformationer; rotation, skalning, translation och projektion. Rotation och skalning
Finaltävling i Umeå den 18 november 2017
 KOLORNA MATEMATIKTÄVLING venska matematikersamfundet Finaltävling i Umeå den 18 november 017 1. Ett visst spel för två spelare går till på följande sätt: Ett mynt placeras på den första rutan i en rad
KOLORNA MATEMATIKTÄVLING venska matematikersamfundet Finaltävling i Umeå den 18 november 017 1. Ett visst spel för två spelare går till på följande sätt: Ett mynt placeras på den första rutan i en rad
2. For which values of the parameters α and β has the linear system. dy/dt x + y
 MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA134 Differential Equations and Transform
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA134 Differential Equations and Transform
Veckoblad 3, Linjär algebra IT, VT2010
 Veckoblad 3, Linjär algebra IT, VT Vi inleder den tredje veckan med att gå igenom begreppen determinant och invers matris som vi inte hann med i vecka, se veckoblad för övningar etc på dessa avsnitt. Därefter
Veckoblad 3, Linjär algebra IT, VT Vi inleder den tredje veckan med att gå igenom begreppen determinant och invers matris som vi inte hann med i vecka, se veckoblad för övningar etc på dessa avsnitt. Därefter
Tillämpad biomekanik, 5 poäng Övningsuppgifter
 , plan kinematik och kinetik 1. Konstruktionen i figuren används för att överföra rotationsrörelse för stången till en rätlinjig rörelse för hjulet. a) Bestäm stångens vinkelhastighet ϕ& som funktion av
, plan kinematik och kinetik 1. Konstruktionen i figuren används för att överföra rotationsrörelse för stången till en rätlinjig rörelse för hjulet. a) Bestäm stångens vinkelhastighet ϕ& som funktion av
Introduktionskurs i matematik LÄSANVISNINGAR
 UPPSALA UNIVERSITET Matematiska institutionen Höstterminen 006 Introduktionskurs i matematik för civilingenjörsprogrammet F Tentamen på Introduktionskursen i matematik äger rum lördagen den 6 september
UPPSALA UNIVERSITET Matematiska institutionen Höstterminen 006 Introduktionskurs i matematik för civilingenjörsprogrammet F Tentamen på Introduktionskursen i matematik äger rum lördagen den 6 september
POSTKODVINSTER á 1.000 kronor Inom nedanstående postkoder vinner följande 244 lottnummer 1.000 kronor vardera:
 Dragningsresultat vecka 52-2014 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Dragningsresultat vecka 52-2014 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
LINJÄR ALGEBRA HT2013. Kurslitteratur: Anton: Elementary Linear Algebra 10:e upplagan.
 LINJÄR ALGEBRA HT2013 JONAS WIKLUND Kurslitteratur: Anton: Elementary Linear Algebra 10:e upplagan. 1. LINJÄRA EKVATIONSSYSTEM OCH MATRISER 1.1 Introduktion. Till stor del bör du känna till ekvationslösning
LINJÄR ALGEBRA HT2013 JONAS WIKLUND Kurslitteratur: Anton: Elementary Linear Algebra 10:e upplagan. 1. LINJÄRA EKVATIONSSYSTEM OCH MATRISER 1.1 Introduktion. Till stor del bör du känna till ekvationslösning
3D: transformationer:
 3D: transformationer: ramar, matriser, kvaternioner perspektiv: ortografisk, perspektiv kurvor, ytor: parametriska, kubiska - interpolerande, Bézier, spline Inlämningsuppgift 3 Yngve Sundblad y@kth.se
3D: transformationer: ramar, matriser, kvaternioner perspektiv: ortografisk, perspektiv kurvor, ytor: parametriska, kubiska - interpolerande, Bézier, spline Inlämningsuppgift 3 Yngve Sundblad y@kth.se
Lösningsförslag TATM
 Lösningsförslag TATM9 0-0-0. a) Summan är geometrisk med kvoten q = / och termer. Alltså, 50 k = 50 k+ = k ) ) ) ) =. k= k= b) Från definitionen av binomialkoefficienter ser vi att ) ) n n nn ) 6 = = =
Lösningsförslag TATM9 0-0-0. a) Summan är geometrisk med kvoten q = / och termer. Alltså, 50 k = 50 k+ = k ) ) ) ) =. k= k= b) Från definitionen av binomialkoefficienter ser vi att ) ) n n nn ) 6 = = =
Sidor i boken KB 6, 66
 Sidor i boken KB 6, 66 Funktioner Ordet funktion syftar inom matematiken på en regel som innebär att till varje invärde associeras ett utvärde. Ofta beskrivs sambandet mellan invärde och utvärde med en
Sidor i boken KB 6, 66 Funktioner Ordet funktion syftar inom matematiken på en regel som innebär att till varje invärde associeras ett utvärde. Ofta beskrivs sambandet mellan invärde och utvärde med en
TNA004 Analys II Tentamen Lösningsskisser
 TNA004 Analys II Tentamen 20-06-0 Lösningsskisser. a) De båda kurvorna skär varandra i x 0 och x. På intervallet 0 x är x x. Området D är då det skuggade i figuren nedan, där även en tunn rektangel är
TNA004 Analys II Tentamen 20-06-0 Lösningsskisser. a) De båda kurvorna skär varandra i x 0 och x. På intervallet 0 x är x x. Området D är då det skuggade i figuren nedan, där även en tunn rektangel är
KTH, Matematik. Del I. (totalt 15 poäng, inklusive bonuspoäng). (1) Betrakta följande mängder i R 3 :
. (1) Betrakta följande mängder i R 3 :") KTH, Matematik Tentamen i Linjär algebra, SF64, för F och D, den 3:e juni, 9 OBS Svaret skall motiveras och lösningen skrivas, ordentligt och klart Inga hjälpmedel är tillåtna Betg enligt följande tabell:
KTH, Matematik Tentamen i Linjär algebra, SF64, för F och D, den 3:e juni, 9 OBS Svaret skall motiveras och lösningen skrivas, ordentligt och klart Inga hjälpmedel är tillåtna Betg enligt följande tabell:
VECKANS LILLA POSTKODVINST á 1.000 kronor Inom nedanstående postkoder vinner följande 219 lottnummer 1.000 kronor vardera:
 Dragningsresultat vecka 27-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
Dragningsresultat vecka 27-2015 Här nedan kan du se om du är en av de lyckliga vinnarna i veckans utlottning i Svenska PostkodLotteriet. När du har vunnit betalar vi automatiskt ut dina vinstpengar till
L O. a r. l e d. l g. e s d. n a. t o. n a. n o. i a. t i l. t a l p. n e. e d. r v. n e. k e d. l l. r vä. Tävlingen arrangeras av S UASH CENTER
 ö f Nu b y f Avö v! S i vä i Rk S U 65.000 DER L O F R O i SPONS i ö i. S Fjä m i k iv. kmm ch i, k i i TV-x u! ivi vä k Säi h c ku ih i B möj Tävi v S UASH CENTER O F F I C I E LLT RAC K E T, B O LL O
ö f Nu b y f Avö v! S i vä i Rk S U 65.000 DER L O F R O i SPONS i ö i. S Fjä m i k iv. kmm ch i, k i i TV-x u! ivi vä k Säi h c ku ih i B möj Tävi v S UASH CENTER O F F I C I E LLT RAC K E T, B O LL O
Geometry shaders! och Tesselation shaders!
 5(91) Information Coding / Computer Graphics, ISY, LiTH Geometry shaders och Tesselation shaders Ytterligare shadersteg i geometristeget i OpenGLpipelinen Kan modifiera, lägga till och ta bort geometri
5(91) Information Coding / Computer Graphics, ISY, LiTH Geometry shaders och Tesselation shaders Ytterligare shadersteg i geometristeget i OpenGLpipelinen Kan modifiera, lägga till och ta bort geometri
bruksanvisning/ user manual
 bruksanvisning/ user manual IBU 50 - IBU 50 RF L ä s d e n n a b r u k s a n v i s n i n g f ö r s t! B ä s t a k u n d, T a c k f ö r a t t d u h a r v a l t a t t k -p ö pra o deun k t C. y lvii n dhao
bruksanvisning/ user manual IBU 50 - IBU 50 RF L ä s d e n n a b r u k s a n v i s n i n g f ö r s t! B ä s t a k u n d, T a c k f ö r a t t d u h a r v a l t a t t k -p ö pra o deun k t C. y lvii n dhao