1(3) Tentamen i INTRODUKTION TILL SYSTEM- OCH REGLERTEKNIK
|
|
|
- Sandra Amanda Svensson
- för 9 år sedan
- Visningar:
Transkript
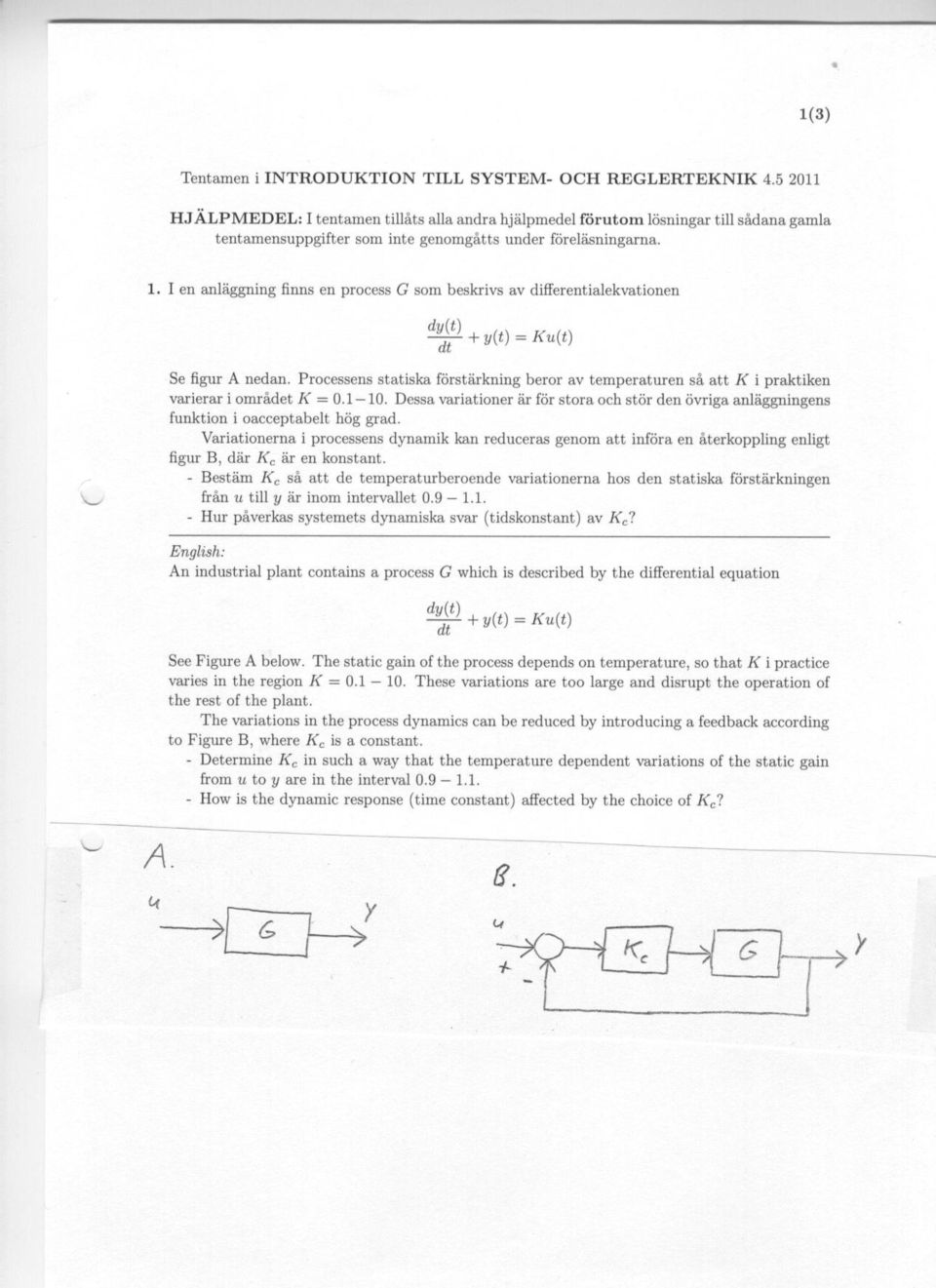
1 1(3) Tentamen i INTRODUKTION TILL SYSTEM- OCH REGLERTEKNIK HJÄLPMEDEL: I tentamen tillåts alla andra hjälpmedel förutom lösningar till sådana gamla tentamensuppgifter som inte genomgåtts under föreläsningarna. 1. Proteinerna i en cell förnyas kontinuerligt genom att existerande molekyler degraderas och ersätts genom syntes av nya molekyler. Koncentration c(t) hos ett protein kan beskrivas med differentialekvationen dc(t) = k deg c(t) + r syn Här anger r syn hastigheten med vilket nytt protein syntetiseras och termen k deg c(t) anger degraderingshastigheten, med vilket proteinet sönderfaller. a) Man vill bestämma synteshastigheten r syn hos ett protein i en cell. Man kan emellertid inte mäta synteshastigheten direkt, utan endast proteinets koncentration i cellen. För att bestämma synteshastigheten bestämmer man först degraderingshastigheten genom att behandla celler så att syntesen av nytt protein förhindras, dvs r syn = 0. Härvid är halveringstiden (dvs den tid det tar för koncentrationen att minska till hälften) 40 min. Bestäm konstanten k deg. [Ledning: Betrakta c(t) för en stegformad ändring hos synteshastigheten r syn (t) = { rsyn, t < 0 0, t 0 ] b) I stationärtillståndet, dvs då dc(t)/ = 0, är proteinkoncentration (i lämpliga enheter) c = 1. Använd den enligt a-fallet bestämda värdet för k deg för att bestämma synteshastigheten r syn. The proteins in a cell are continuously renewed by degradation of existing molecules which are replaced by synthesis of new molecules. The concentration c(t) of a protein can be described by the differential equation dc(t) = k deg c(t) + r syn Here r syn is the synthesis rate of new protein and the term k deg c(t) denotes the degradation rate. a) We wish to determine the synthesis rate r syn of a protein in a cell. It is, however, not possible to measure the synthesis rate directly, but only the protein concentration in the cell can be measured. In order to determine the synthesis rate, the degradation rate is determined first by treating the cells so that synthesis of new protein is prevented, i.e., r syn = 0. The half-live (i.e., the time it takes for the concentration to reduce to 50% of the initial value) is then 40 min. Determine the constant k deg. [Clue: Consider c(t) for a step change in the synthesis rate, r syn (t) = { rsyn, t < 0 0, t 0 ] b) In the stationary state, i.e., when dc(t)/ = 0, the protein concentration is (in suitable units) c = 1. Use the value of k deg determined above to determine the synthesis rate r syn.
 hos ett protein kan beskrivas med differentialekvationen dc(t) = k deg c(t) + r syn Här anger r syn hastigheten med vilket nytt protein syntetiseras och termen k deg c(t) anger")
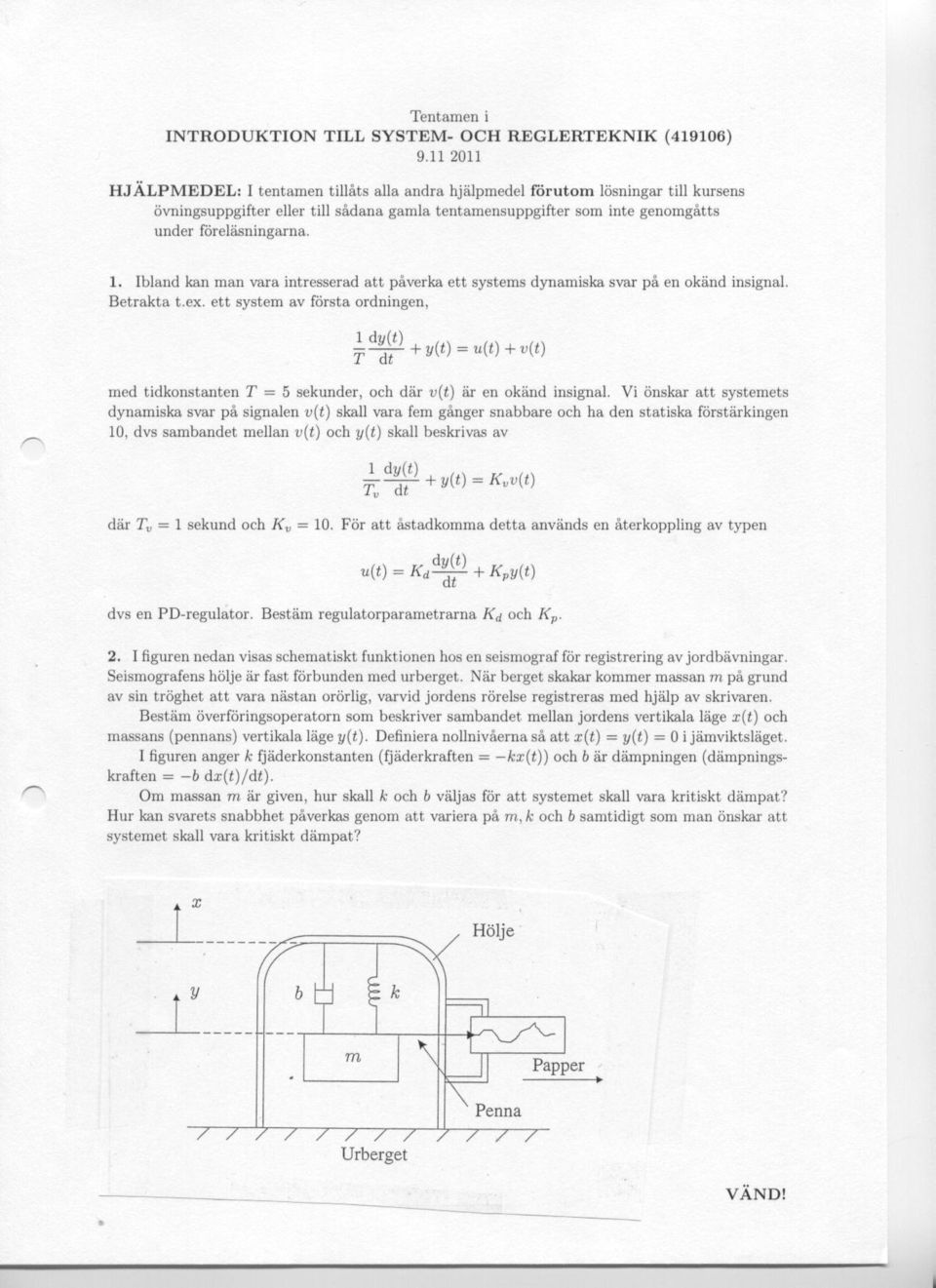
2 2(3) 2. Vid mobil kommunikation förändras styrkan hos den mottagna signalen på grund av varierande avstånd mellan avsändare och mottagare. Antag för enkelhetens skull att den mottagna signalstyrkan y beror av effekten u hos den utsända signalen enligt y(t) = u(t) + d(t) där d(t) är en störning som påverkar styrkan hos den mottagna signalen. För att upprätthålla en konstant, lämplig styrka hos den mottagna signalen används effektreglering i enlighet med exempel 2.5 i kurskompendiet. Härvid återkopplas signalstyrkan y hos mottagaren för att justera effekten u hos den utsända signalen. Detta kan åstadkommas med hjälp av en I-regulator, dvs genom att låta u förändras tills önskad styrka r hos den mottagna signalen uppnås, enligt du(t) = K c (r y(t)) a) Upprita ett blockschema som beskriver effektreglersystemet, samt bestäm överföringsoperatorerna som beskriver sambanden mellan systemets insignaler r och d och utsignalen y. b) Bestäm för vilka värden på K c reglerkretsen är stabil. c) Bestäm hur reglerfelet y(t) r förändras efter en stegformad förändring i störningen d(t), och bestäm sedan K c så att felet y(t) r efter en stegformad förändring i d(t) minskar till under 10% från sitt begynnelsevärde på 0.01 sekunder. In mobile communication the received signal power varies due to varying distance between transmitter and receiver. Assume for simplicity that the received signal power y depends on the power u of the transmitted signal according to y(t) = u(t) + d(t) where d(t) is a disturbance which affects the received signal power. In order to maintain a constant, suitable power of the received signal, power control is applied (cf. Example 2.5 in the lecture notes). In this approach the received signal power y at the receiver is fed back to adjust the power u of the transmitted signal. This can be achieved using an I-controller, i.e., by letting u change until the desired power r is achieved for the received signal, according to du(t) = K c (r y(t)) a) Draw a block diagram of the power control system, and determine the transfer functions which describe the relations between the system inputs r and d and the output y. b) Determine for which values of K c the control system is stable. c) Determine how the control error y(t) r varies after a step change in the disturbance d(t), and find a value for K c such that the error y(t) r after a step change in d(t) decreases to less 10% from its initial value in 0.01 seconds.

3 3(3) 3. Vissa tekniska system (såsom flygplan) är instabila och kan därför vara svåra, eller t.o.m. omöjliga att styra manuellt. För att underlätta manuell styrning av sådana system kan man använda en lämplig regutor för att stabilisera systemet först. Mera konkret, ett instabilt system som beskrivs av y(t) = G(p)u(t) stabiliseras först av en regulator u(t) = G c (p)(r(t) y(t)), så att den slutna kretsen y(t) = G(p)G c(p) 1 + G(p)G c (p) r(t) är stabil. Här är r(t) börvärdet till regulatorn. Genom att sedan i stället för insignalen u manipulera regulatorns börvärde r blir manuell styrning av systemet enklare. Betrakta följande andra ordningens system, G 1 (p) = 1 p p 1 och G 2 (p) = a) Undersök stabiliteten hos systemen G 1 (p) och G 2 (p). 1 p 2 0.5p 1 b) Man vill stabilisera systemen G 1 (p) och G 2 (p) med en enkel P-regulator av formen u(t) = K c (r(t) y(t)). Undersök om detta är möjligt. Ifall det är möjligt, bestäm K c så att den slutna kretsen är stabil och kritiskt dämpad. c) Ifall något av systemen G 1 (p) eller G 2 (p) inte kan stabiliseras med en P-regulator, föreslå en regulator som stabiliserar systemet, och bestäm reglerlagen så att den slutna kretsen är kritiskt dämpad. Some technical systems are unstable (such as some airplanes) and they may therefore be difficult, or even impossible, to control manually. In order to enable manual control of such systems a suitable controller can be applied to stabilize the system first. More concretely, an unstable system described by y(t) = G(p)u(t) is first stabilized by a controller u(t) = G c (p)(r(t) y(t)), so that the closed loop y(t) = G(p)G c(p) 1 + G(p)G c (p) r(t) is stable. Here r(t) is the setpoint to the controller. By adjusting this setpoint r instead of the system input u, manual control will be easier. Consider the following second-order systems, G 1 (p) = 1 p p 1 and G 2 (p) = a) Determine the stability of the systems G 1 (p) and G 2 (p). 1 p 2 0.5p 1 b) We wish to stabilize the systems G 1 (p) and G 2 (p) using a simple P-controller of the form u(t) = K c (r(t) y(t)). Determine whether this can be achieved. If stabilization is possible, determine K c so that the closed loop is stable and critically damped. c) If either of the systems G 1 (p) or G 2 (p) cannot be stabilized by a P-controller, propose a controller which stabilizes the system, and determine the control law so that the closed loop is critically damped.
 börvärdet till regulatorn. Genom att sedan i stället för insignalen u manipulera regulatorns börvärde r blir manuell styrning av systemet enklare.")
4
5 2(3) 2. För en termosflaska anger tillverkaren att vatten vid 100 C efter 5 timmar avkyls till 80 C då flaskan bevaras vid rumstemperatur (20 C). - Bestäm en lämplig modell som beskriver hur temperaturen i termosen beror av tiden. - För att bedöma termosflaskans användbarhet, uppskatta hur lång tid det tar för vatten med begynnelsetemperaturen 90 C att kylas till 40 C då flaskan placeras i -10 C yttertemperatur. For a thermos bottle the manufacturer claims that water at 100 C after 5 hours cools to 80 C when the bottle is placed in room temperature (20 C). - Determine a suitable model which describes how the temperature in the bottle depends on time. - In order to evaluate the usefulness of the thermos bottle, estimate how long it takes for water with initial temperature 90 C to cool to 40 C when the bottle is placed in -10 C ambient temperature.
.")
6 3. En hiss i ett höghus beskrivs av modellen 3(3) y(t) = G(p)u(t), G(p) = 1 p + 5 där y(t) är vertikal hastighet, och u(t) är insignalen till motorn som driver hissen. För att styra hissens hastighet används en PI-regulator av formen t ) u(t) = r(t) (K p y(t) + K i y(τ)dτ τ=0 där r(t) är hastighetens börvärde. a) Upprita ett blockschema för reglersystemet. Observera speciellt positionen hos regulatorn! b) Bestäm ett uttryck för överföringsfunktionen från r(t) till y(t) för den slutna kretsen. c) Bestäm regulatorparametrarna K p och K i så att: - den slutna kretsen är kritiskt dämpad, dvs beskrivs av ett system med två lika stora tidskonstanter T 1 = T 2 = T, samt - felet r(t) y(t) efter en stegförändring i r(t) minskar till under 10% efter 2 sekunder. Ledning: Bestäm först värdet för tidskonstanten T, och därefter motsvarande regulatorparametrar. An elevator in a high-rise building is described by the model y(t) = G(p)u(t), G(p) = 1 p + 5 where y(t) is the vertical velocity, and u(t) is the input signal to the motor which drives the elevator. In order to control the velocity of the elevator a PI controller t ) u(t) = r(t) (K p y(t) + K i y(τ)dτ τ=0 is used, where r(t) is the setpoint of the velocity. a) Construct a block diagram of the control systems. Observe in particular the position of the controller! b) Determine an expression for the transfer function of from r(t) to y(t) for the closed-loop system. c) Determine the controller parameters K p and K i such that: - the closed loop is critically damped, i.e., it is described by a system with two equal time constants T 1 = T 2 = T, and - the error r(t) y(t) after a step change in r(t) reduces to less than 10% after 2 seconds. Clue: First determine the value of the time constant T, and then find the corresponding controller parameters.
 Bestäm regulatorparametrarna K p och K i så att: - den slutna kretsen är kritiskt dämpad, dvs beskrivs av ett system med två lika stora tidskonstanter T 1 = T 2 = T, samt - felet r(t) y(t) efter")
7
8 3. Vid lagerstyrning i leveranskedjor är målsättningen att hålla lämpliga lagerstorlekar trots fluktuationer i leveranser och försäljning. Betrakta en enkel leveranskedja med en grosshandlare som levererar en vara till en försäljare som säljer varan vidare till sina kunder. Grosshandlaren upprätthåller ett lager med storleken y G (t) (enheter), medan försäljaren har ett lager med storleken y F (t) (enheter). Man kan ofta relativt väl beskriva lagerstorlekarnas (grova) variationer med differentialekvationer, varvid grosshandlarens lagerstorlek beskrivs av dy G (t) = u G (t) u F (t) där u G (t) är mängden inköpt vara (enheter/tid), och u F (t) är mängden vara som säljs vidare till försäljaren (enheter/tid). På samma sätt beskrivs försäljarens lagerstorlek av dy F (t) = u F (t) s F (t) där s F (t) är mängden såld vara (enheter/tid). För att kunna garantera leverans av varan bör det hela tiden finnas en viss mängd vara i lagren, men för att undvika onödiga lagerkostnader får mängden inte vara alltför stor. För att åstadkomma detta använder sig både försäljaren och grosshandlaren av en reglerlag, så att försäljaren strävar till att hålla sitt lager vid nivån r F (enheter) trots fluktuationer i försäljningen s F (t) genom att använda linjär återkoppling enligt u F (t) = K F (r F y F (t)) medan grosshandlaren strävar till att hålla sitt lager vid nivån r G (enheter) trots varierande leveranser u F (t) till handlaren med hjälp av linjär återkoppling enligt u G (t) = K G (r G y G (t)) a) Bestäm sambandet mellan försäljningen s F (t) och försäljarens lagernivå y F (t), samt beräkna y F (t) efter en stegförändring i s F (t), om K F = 1 antas. b) Bestäm sambandet mellan försäljningen s F (t) och grosshandlarens lagernivå y G (t), samt beräkna y G (t) efter en stegförändring i s F (t), om K F = 1 och K G = 1 antas. c) Vad kan man säga om effektiviteten hos ovan beskrivna metod för lagerstyrning? Föreslå sätt på vilka lagerstyrningen eventuellt kunde göras effektivare.
 variationer med differentialekvationer, varvid grosshandlarens lagerstorlek beskrivs av dy G (t) = u G (t) u F (t) där u G (t) är mängden")
LUNDS TEKNISKA HÖGSKOLA Institutionen för Elektro- och Informationsteknik
 LUNDS TEKNISKA HÖGSKOLA Institutionen för Elektro- och Informationsteknik SIGNALBEHANDLING I MULTIMEDIA, EITA50, LP4, 209 Inlämningsuppgift av 2, Assignment out of 2 Inlämningstid: Lämnas in senast kl
LUNDS TEKNISKA HÖGSKOLA Institutionen för Elektro- och Informationsteknik SIGNALBEHANDLING I MULTIMEDIA, EITA50, LP4, 209 Inlämningsuppgift av 2, Assignment out of 2 Inlämningstid: Lämnas in senast kl
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 14-6-5 Sal (1) KÅRA T1 & T (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 14-6-5 Sal (1) KÅRA T1 & T (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken
Lösningar till Tentamen i Reglerteknik AK EL1000/EL1100/EL
 Lösningar till Tentamen i Reglerteknik AK EL/EL/EL 9-6- a. Ansätt: G(s) = b s+a, b >, a >. Utsignalen ges av y(t) = G(iω) sin (ωt + arg G(iω)), ω = G(iω) = b ω + a = arg G(iω) = arg b arg (iω + a) = arctan
Lösningar till Tentamen i Reglerteknik AK EL/EL/EL 9-6- a. Ansätt: G(s) = b s+a, b >, a >. Utsignalen ges av y(t) = G(iω) sin (ωt + arg G(iω)), ω = G(iω) = b ω + a = arg G(iω) = arg b arg (iω + a) = arctan
12.6 Heat equation, Wave equation
 12.6 Heat equation, 12.2-3 Wave equation Eugenia Malinnikova, NTNU September 26, 2017 1 Heat equation in higher dimensions The heat equation in higher dimensions (two or three) is u t ( = c 2 2 ) u x 2
12.6 Heat equation, 12.2-3 Wave equation Eugenia Malinnikova, NTNU September 26, 2017 1 Heat equation in higher dimensions The heat equation in higher dimensions (two or three) is u t ( = c 2 2 ) u x 2
1. Compute the following matrix: (2 p) 2. Compute the determinant of the following matrix: (2 p)
 2. Compute the determinant of the following matrix: (2 p)") UMEÅ UNIVERSITY Department of Mathematics and Mathematical Statistics Pre-exam in mathematics Linear algebra 2012-02-07 1. Compute the following matrix: (2 p 3 1 2 3 2 2 7 ( 4 3 5 2 2. Compute the determinant
UMEÅ UNIVERSITY Department of Mathematics and Mathematical Statistics Pre-exam in mathematics Linear algebra 2012-02-07 1. Compute the following matrix: (2 p 3 1 2 3 2 2 7 ( 4 3 5 2 2. Compute the determinant
TENTAMEN I REGLERTEKNIK
 TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
LUNDS TEKNISKA HÖGSKOLA Inst. for Elektro- och Informationsteknik. SIGNALBEHANDLING I MULTIMEDIA, ETI265 Inlämningsuppgift 1 (av 2), Task 1 (out of 2)
, Task 1 (out of 2)") LUNDS TEKNISKA HÖGSKOLA Inst. for Elektro- och Informationsteknik SIGNALBEHANDLING I MULTIMEDIA, ETI65 Inlämningsuppgift (av ), Task (out of ) Inlämningstid: Inlämnas senast kl 7. fredagen den 5:e maj
LUNDS TEKNISKA HÖGSKOLA Inst. for Elektro- och Informationsteknik SIGNALBEHANDLING I MULTIMEDIA, ETI65 Inlämningsuppgift (av ), Task (out of ) Inlämningstid: Inlämnas senast kl 7. fredagen den 5:e maj
Tentamen i Matematik 2: M0030M.
 Tentamen i Matematik 2: M0030M. Datum: 203-0-5 Skrivtid: 09:00 4:00 Antal uppgifter: 2 ( 30 poäng ). Examinator: Norbert Euler Tel: 0920-492878 Tillåtna hjälpmedel: Inga Betygsgränser: 4p 9p = 3; 20p 24p
Tentamen i Matematik 2: M0030M. Datum: 203-0-5 Skrivtid: 09:00 4:00 Antal uppgifter: 2 ( 30 poäng ). Examinator: Norbert Euler Tel: 0920-492878 Tillåtna hjälpmedel: Inga Betygsgränser: 4p 9p = 3; 20p 24p
1. Varje bevissteg ska motiveras formellt (informella bevis ger 0 poang)
") Tentamen i Programmeringsteori Institutionen for datorteknik Uppsala universitet 1996{08{14 Larare: Parosh A. A., M. Kindahl Plats: Polacksbacken Skrivtid: 9 15 Hjalpmedel: Inga Anvisningar: 1. Varje bevissteg
Tentamen i Programmeringsteori Institutionen for datorteknik Uppsala universitet 1996{08{14 Larare: Parosh A. A., M. Kindahl Plats: Polacksbacken Skrivtid: 9 15 Hjalpmedel: Inga Anvisningar: 1. Varje bevissteg
Föreläsning 1 Reglerteknik AK
 Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
STORSEMINARIET 3. Amplitud. frekvens. frekvens uppgift 9.4 (cylindriskt rör)
") STORSEMINARIET 1 uppgift SS1.1 A 320 g block oscillates with an amplitude of 15 cm at the end of a spring, k =6Nm -1.Attimet = 0, the displacement x = 7.5 cm and the velocity is positive, v > 0. Write
STORSEMINARIET 1 uppgift SS1.1 A 320 g block oscillates with an amplitude of 15 cm at the end of a spring, k =6Nm -1.Attimet = 0, the displacement x = 7.5 cm and the velocity is positive, v > 0. Write
Beijer Electronics AB 2000, MA00336A, 2000-12
 Demonstration driver English Svenska Beijer Electronics AB 2000, MA00336A, 2000-12 Beijer Electronics AB reserves the right to change information in this manual without prior notice. All examples in this
Demonstration driver English Svenska Beijer Electronics AB 2000, MA00336A, 2000-12 Beijer Electronics AB reserves the right to change information in this manual without prior notice. All examples in this
Tentamen i Matematik 2: M0030M.
 Tentamen i Matematik 2: M0030M. Datum: 2010-01-12 Skrivtid: 09:00 14:00 Antal uppgifter: 6 ( 30 poäng ). Jourhavande lärare: Norbert Euler Telefon: 0920-492878 Tillåtna hjälpmedel: Inga Till alla uppgifterna
Tentamen i Matematik 2: M0030M. Datum: 2010-01-12 Skrivtid: 09:00 14:00 Antal uppgifter: 6 ( 30 poäng ). Jourhavande lärare: Norbert Euler Telefon: 0920-492878 Tillåtna hjälpmedel: Inga Till alla uppgifterna
Tentamen i Matematik 3: M0031M.
 Tentamen i Matematik 3: M0031M. Datum: 2009-10-26 Skrivtid: 09:00 14:00 Antal uppgifter: 6 ( 30 poäng ). Jourhavande lärare: Norbert Euler Telefon: 0920-492878 Tillåtna hjälpmedel: Inga Till alla uppgifterna
Tentamen i Matematik 3: M0031M. Datum: 2009-10-26 Skrivtid: 09:00 14:00 Antal uppgifter: 6 ( 30 poäng ). Jourhavande lärare: Norbert Euler Telefon: 0920-492878 Tillåtna hjälpmedel: Inga Till alla uppgifterna
Styrteknik: Binära tal, talsystem och koder D3:1
 Styrteknik: Binära tal, talsystem och koder D3:1 Digitala kursmoment D1 Boolesk algebra D2 Grundläggande logiska funktioner D3 Binära tal, talsystem och koder Styrteknik :Binära tal, talsystem och koder
Styrteknik: Binära tal, talsystem och koder D3:1 Digitala kursmoment D1 Boolesk algebra D2 Grundläggande logiska funktioner D3 Binära tal, talsystem och koder Styrteknik :Binära tal, talsystem och koder
Lösningar till tentamen i styr- och reglerteknik (Med fet stil!)
") Lösningar till tentamen i styr- och reglerteknik (Med fet stil!) Uppgift 1 (4p) Figuren nedan visar ett reglersystem för nivån i en tank.utflödet från tanken styrs av en pump och har storleken V (m 3 /s).
Lösningar till tentamen i styr- och reglerteknik (Med fet stil!) Uppgift 1 (4p) Figuren nedan visar ett reglersystem för nivån i en tank.utflödet från tanken styrs av en pump och har storleken V (m 3 /s).
Övningar i Reglerteknik
 Övningar i Reglerteknik Stabilitet hos återkopplade system Ett system är stabilt om utsignalen alltid är begränsad om insignalen är begränsad. Linjära tidsinvarianta system är stabila precis då alla poler
Övningar i Reglerteknik Stabilitet hos återkopplade system Ett system är stabilt om utsignalen alltid är begränsad om insignalen är begränsad. Linjära tidsinvarianta system är stabila precis då alla poler
Reglerteknik AK, FRTF05
 Institutionen för REGLERTEKNIK Reglerteknik AK, FRTF05 Tentamen 23 augusti 207 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
Institutionen för REGLERTEKNIK Reglerteknik AK, FRTF05 Tentamen 23 augusti 207 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
Pre-Test 1: M0030M - Linear Algebra.
 Pre-Test : M3M - Linear Algebra. Test your knowledge on Linear Algebra for the course M3M by solving the problems in this test. It should not take you longer than 9 minutes. M3M Problem : Betrakta fyra
Pre-Test : M3M - Linear Algebra. Test your knowledge on Linear Algebra for the course M3M by solving the problems in this test. It should not take you longer than 9 minutes. M3M Problem : Betrakta fyra
Webbregistrering pa kurs och termin
 Webbregistrering pa kurs och termin 1. Du loggar in på www.kth.se via den personliga menyn Under fliken Kurser och under fliken Program finns på höger sida en länk till Studieöversiktssidan. På den sidan
Webbregistrering pa kurs och termin 1. Du loggar in på www.kth.se via den personliga menyn Under fliken Kurser och under fliken Program finns på höger sida en länk till Studieöversiktssidan. På den sidan
Sammanfattning hydraulik
 Sammanfattning hydraulik Bernoullis ekvation Rörelsemängdsekvationen Energiekvation applikationer Rörströmning Friktionskoefficient, Moody s diagram Pumpsystem BERNOULLI S EQUATION 2 p V z H const. Quantity
Sammanfattning hydraulik Bernoullis ekvation Rörelsemängdsekvationen Energiekvation applikationer Rörströmning Friktionskoefficient, Moody s diagram Pumpsystem BERNOULLI S EQUATION 2 p V z H const. Quantity
SIMULINK. En kort introduktion till. Polplacerad regulator sid 8 Appendix Symboler/block sid 10. Institutionen för Tillämpad Fysik och elektronik
 Institutionen för Tillämpad Fysik och elektronik Umeå Universitet BE, BT Version: 5/ -09 DMR En kort introduktion till SIMULINK Polplacerad regulator sid 8 Appendix Symboler/block sid 0 Introduktion till
Institutionen för Tillämpad Fysik och elektronik Umeå Universitet BE, BT Version: 5/ -09 DMR En kort introduktion till SIMULINK Polplacerad regulator sid 8 Appendix Symboler/block sid 0 Introduktion till
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING TID: 13 mars 2018, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 070-3113019 BESÖKER SALEN: 09.30,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING TID: 13 mars 2018, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 070-3113019 BESÖKER SALEN: 09.30,
A
 Lunds Universitet LTH Ingenjorshogskolan i Helsingborg Tentamen i Reglerteknik 2008{05{29. Ett system beskrivs av foljande in-utsignalsamband: dar u(t) ar insignal och y(t) utsignal. d 2 y dt 2 + dy du
Lunds Universitet LTH Ingenjorshogskolan i Helsingborg Tentamen i Reglerteknik 2008{05{29. Ett system beskrivs av foljande in-utsignalsamband: dar u(t) ar insignal och y(t) utsignal. d 2 y dt 2 + dy du
Grafisk teknik IMCDP IMCDP IMCDP. IMCDP(filter) Sasan Gooran (HT 2006) Assumptions:
 Sasan Gooran (HT 2006) Assumptions:") IMCDP Grafisk teknik The impact of the placed dot is fed back to the original image by a filter Original Image Binary Image Sasan Gooran (HT 2006) The next dot is placed where the modified image has its
IMCDP Grafisk teknik The impact of the placed dot is fed back to the original image by a filter Original Image Binary Image Sasan Gooran (HT 2006) The next dot is placed where the modified image has its
Isolda Purchase - EDI
 Isolda Purchase - EDI Document v 1.0 1 Table of Contents Table of Contents... 2 1 Introduction... 3 1.1 What is EDI?... 4 1.2 Sending and receiving documents... 4 1.3 File format... 4 1.3.1 XML (language
Isolda Purchase - EDI Document v 1.0 1 Table of Contents Table of Contents... 2 1 Introduction... 3 1.1 What is EDI?... 4 1.2 Sending and receiving documents... 4 1.3 File format... 4 1.3.1 XML (language
INLÄMNINGSUPPGIFT I. REGLERTEKNIK I för STS3 & X4
 SYSTEMTEKNIK, IT-INSTITUTIONEN UPPSALA UNIVERSITET DZ 2015-09 INLÄMNINGSUPPGIFTER REGLERTEKNIK I för STS3 & X4 INLÄMNINGSUPPGIFT I Inlämning: Senast fredag den 2:a oktober kl 15.00 Lämnas i fack nr 30,
SYSTEMTEKNIK, IT-INSTITUTIONEN UPPSALA UNIVERSITET DZ 2015-09 INLÄMNINGSUPPGIFTER REGLERTEKNIK I för STS3 & X4 INLÄMNINGSUPPGIFT I Inlämning: Senast fredag den 2:a oktober kl 15.00 Lämnas i fack nr 30,
Viktig information för transmittrar med option /A1 Gold-Plated Diaphragm
 Viktig information för transmittrar med option /A1 Gold-Plated Diaphragm Guldplätering kan aldrig helt stoppa genomträngningen av vätgas, men den får processen att gå långsammare. En tjock guldplätering
Viktig information för transmittrar med option /A1 Gold-Plated Diaphragm Guldplätering kan aldrig helt stoppa genomträngningen av vätgas, men den får processen att gå långsammare. En tjock guldplätering
FORTA M315. Installation. 218 mm.
 1 Installation 2 1 2 1 218 mm. 1 2 4 5 6 7 8 9 2 G, G0= Max 100 m 1.5 mm² (AWG 15) X1, MX, Y, VH, VC = Max 200 m 0.5 mm² (AWG 20) Y X1 MX VH VC G1 G0 G 0 V 24 V~ IN 0-10 0-5, 2-6 60 s OP O 1 2 4 5 6 7
1 Installation 2 1 2 1 218 mm. 1 2 4 5 6 7 8 9 2 G, G0= Max 100 m 1.5 mm² (AWG 15) X1, MX, Y, VH, VC = Max 200 m 0.5 mm² (AWG 20) Y X1 MX VH VC G1 G0 G 0 V 24 V~ IN 0-10 0-5, 2-6 60 s OP O 1 2 4 5 6 7
Support Manual HoistLocatel Electronic Locks
 Support Manual HoistLocatel Electronic Locks 1. S70, Create a Terminating Card for Cards Terminating Card 2. Select the card you want to block, look among Card No. Then click on the single arrow pointing
Support Manual HoistLocatel Electronic Locks 1. S70, Create a Terminating Card for Cards Terminating Card 2. Select the card you want to block, look among Card No. Then click on the single arrow pointing
Webbreg öppen: 26/ /
 Webbregistrering pa kurs, period 2 HT 2015. Webbreg öppen: 26/10 2015 5/11 2015 1. Du loggar in på www.kth.se via den personliga menyn Under fliken Kurser och under fliken Program finns på höger sida en
Webbregistrering pa kurs, period 2 HT 2015. Webbreg öppen: 26/10 2015 5/11 2015 1. Du loggar in på www.kth.se via den personliga menyn Under fliken Kurser och under fliken Program finns på höger sida en
Välkomna till TSRT15 Reglerteknik Föreläsning 2
 Välkomna till TSRT15 Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till TSRT15 Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Tentamen i Reglerteknik, för D2/E2/T2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Lördagen den 15 Augusti kl.9.-13. 29 Sal: Tillåtna hjälpmedel: Valfri
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Lördagen den 15 Augusti kl.9.-13. 29 Sal: Tillåtna hjälpmedel: Valfri
INSTALLATION INSTRUCTIONS
 INSTALLATION - REEIVER INSTALLATION INSTRUTIONS RT0 RF WIRELESS ROOM THERMOSTAT AND REEIVER MOUNTING OF WALL MOUTING PLATE - Unscrew the screws under the - Pack contains... Installation - Receiver... Mounting
INSTALLATION - REEIVER INSTALLATION INSTRUTIONS RT0 RF WIRELESS ROOM THERMOSTAT AND REEIVER MOUNTING OF WALL MOUTING PLATE - Unscrew the screws under the - Pack contains... Installation - Receiver... Mounting
SkillGuide. Bruksanvisning. Svenska
 SkillGuide Bruksanvisning Svenska SkillGuide SkillGuide är en apparat utformad för att ge summativ återkoppling i realtid om hjärt- och lungräddning. www.laerdal.com Medföljande delar SkillGuide och bruksanvisning.
SkillGuide Bruksanvisning Svenska SkillGuide SkillGuide är en apparat utformad för att ge summativ återkoppling i realtid om hjärt- och lungräddning. www.laerdal.com Medföljande delar SkillGuide och bruksanvisning.
x 2 2(x + 2), f(x) = by utilizing the guidance given by asymptotes and stationary points. γ : 8xy x 2 y 3 = 12 x + 3
, f(x) = by utilizing the guidance given by asymptotes and stationary points. γ : 8xy x 2 y 3 = 12 x + 3") MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA151 Single Variable Calculus, TEN2 Date:
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA151 Single Variable Calculus, TEN2 Date:
2(x + 1) x f(x) = 3. Find the area of the surface generated by rotating the curve. y = x 3, 0 x 1,
 x f(x) = 3. Find the area of the surface generated by rotating the curve. y = x 3, 0 x 1,") MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA5 Single Variable Calculus, TEN Date: 06--0
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA5 Single Variable Calculus, TEN Date: 06--0
Lösningar till tentamen i Industriell reglerteknik TSRT07 Tentamensdatum: Martin Enqvist
 ösningar till tentamen i Industriell reglerteknik TSRT7 Tentamensdatum: 28-3-2 Martin Enqvist a) Z-transformering av sambanden som beskriver den tidsdiskreta regulatorn ger Iz) = KT Sz T i z ) Ez) = Kz
ösningar till tentamen i Industriell reglerteknik TSRT7 Tentamensdatum: 28-3-2 Martin Enqvist a) Z-transformering av sambanden som beskriver den tidsdiskreta regulatorn ger Iz) = KT Sz T i z ) Ez) = Kz
Föreläsning 2. Reglerteknik AK. c Bo Wahlberg. 3 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Välkomna till TSRT19 Reglerteknik Föreläsning 3. Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula
 Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Hur fattar samhället beslut när forskarna är oeniga?
 Hur fattar samhället beslut när forskarna är oeniga? Martin Peterson m.peterson@tue.nl www.martinpeterson.org Oenighet om vad? 1.Hårda vetenskapliga fakta? ( X observerades vid tid t ) 1.Den vetenskapliga
Hur fattar samhället beslut när forskarna är oeniga? Martin Peterson m.peterson@tue.nl www.martinpeterson.org Oenighet om vad? 1.Hårda vetenskapliga fakta? ( X observerades vid tid t ) 1.Den vetenskapliga
Grafisk teknik IMCDP. Sasan Gooran (HT 2006) Assumptions:
 Assumptions:") Grafisk teknik Sasan Gooran (HT 2006) Iterative Method Controlling Dot Placement (IMCDP) Assumptions: The original continuous-tone image is scaled between 0 and 1 0 and 1 represent white and black respectively
Grafisk teknik Sasan Gooran (HT 2006) Iterative Method Controlling Dot Placement (IMCDP) Assumptions: The original continuous-tone image is scaled between 0 and 1 0 and 1 represent white and black respectively
Högskolan i Skövde (SK, JS) Svensk version Tentamen i matematik
 Svensk version Tentamen i matematik") Högskolan i Skövde (SK, JS) Svensk version Tentamen i matematik Kurs: MA152G Matematisk Analys MA123G Matematisk analys för ingenjörer Tentamensdag: 2012-03-24 kl 14.30-19.30 Hjälpmedel : Inga hjälpmedel
Högskolan i Skövde (SK, JS) Svensk version Tentamen i matematik Kurs: MA152G Matematisk Analys MA123G Matematisk analys för ingenjörer Tentamensdag: 2012-03-24 kl 14.30-19.30 Hjälpmedel : Inga hjälpmedel
Grafisk teknik. Sasan Gooran (HT 2006)
") Grafisk teknik Sasan Gooran (HT 2006) Iterative Method Controlling Dot Placement (IMCDP) Assumptions: The original continuous-tone image is scaled between 0 and 1 0 and 1 represent white and black respectively
Grafisk teknik Sasan Gooran (HT 2006) Iterative Method Controlling Dot Placement (IMCDP) Assumptions: The original continuous-tone image is scaled between 0 and 1 0 and 1 represent white and black respectively
Välkomna till Reglerteknik Föreläsning 2
 Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
2.1 Installation of driver using Internet Installation of driver from disk... 3
 &RQWHQW,QQHKnOO 0DQXDOÃ(QJOLVKÃ'HPRGULYHU )RUHZRUG Ã,QWURGXFWLRQ Ã,QVWDOOÃDQGÃXSGDWHÃGULYHU 2.1 Installation of driver using Internet... 3 2.2 Installation of driver from disk... 3 Ã&RQQHFWLQJÃWKHÃWHUPLQDOÃWRÃWKHÃ3/&ÃV\VWHP
&RQWHQW,QQHKnOO 0DQXDOÃ(QJOLVKÃ'HPRGULYHU )RUHZRUG Ã,QWURGXFWLRQ Ã,QVWDOOÃDQGÃXSGDWHÃGULYHU 2.1 Installation of driver using Internet... 3 2.2 Installation of driver from disk... 3 Ã&RQQHFWLQJÃWKHÃWHUPLQDOÃWRÃWKHÃ3/&ÃV\VWHP
Calculate check digits according to the modulus-11 method
 2016-12-01 Beräkning av kontrollsiffra 11-modulen Calculate check digits according to the modulus-11 method Postadress: 105 19 Stockholm Besöksadress: Palmfeltsvägen 5 www.bankgirot.se Bankgironr: 160-9908
2016-12-01 Beräkning av kontrollsiffra 11-modulen Calculate check digits according to the modulus-11 method Postadress: 105 19 Stockholm Besöksadress: Palmfeltsvägen 5 www.bankgirot.se Bankgironr: 160-9908
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24--4 Sal () TER,TERD (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24--4 Sal () TER,TERD (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2012-04-11 Sal (1) TER3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2012-04-11 Sal (1) TER3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken
Quicksort. Koffman & Wolfgang kapitel 8, avsnitt 9
 Quicksort Koffman & Wolfgang kapitel 8, avsnitt 9 1 Quicksort Quicksort väljer ett spcifikt värde (kallat pivot), och delar upp resten av fältet i två delar: alla element som är pivot läggs i vänstra delen
Quicksort Koffman & Wolfgang kapitel 8, avsnitt 9 1 Quicksort Quicksort väljer ett spcifikt värde (kallat pivot), och delar upp resten av fältet i två delar: alla element som är pivot läggs i vänstra delen
Reglerteknik AK, FRTF05
 Institutionen för REGLERTEKNIK Reglerteknik AK, FRTF05 Tentamen 3 april 208 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
Institutionen för REGLERTEKNIK Reglerteknik AK, FRTF05 Tentamen 3 april 208 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
Isometries of the plane
 Isometries of the plane Mikael Forsberg August 23, 2011 Abstract Här följer del av ett dokument om Tesselering som jag skrivit för en annan kurs. Denna del handlar om isometrier och innehåller bevis för
Isometries of the plane Mikael Forsberg August 23, 2011 Abstract Här följer del av ett dokument om Tesselering som jag skrivit för en annan kurs. Denna del handlar om isometrier och innehåller bevis för
www.pianoflygelservice.com
 PRESENTERAR KLIMATANLÄGGNING FÖR PIANON OCH FLYGLAR. Varför blir ett piano eller en flygel ostämd? Det kan vara många orsaker, t.ex. hårdhänt bruk, flyttning av instrument, stora skillnader i luftfuktighet
PRESENTERAR KLIMATANLÄGGNING FÖR PIANON OCH FLYGLAR. Varför blir ett piano eller en flygel ostämd? Det kan vara många orsaker, t.ex. hårdhänt bruk, flyttning av instrument, stora skillnader i luftfuktighet
Boiler with heatpump / Värmepumpsberedare
 Boiler with heatpump / Värmepumpsberedare QUICK START GUIDE / SNABBSTART GUIDE More information and instruction videos on our homepage www.indol.se Mer information och instruktionsvideos på vår hemsida
Boiler with heatpump / Värmepumpsberedare QUICK START GUIDE / SNABBSTART GUIDE More information and instruction videos on our homepage www.indol.se Mer information och instruktionsvideos på vår hemsida
Styr- och Reglerteknik för U3/EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071118/ Thomas Munther LABORATION 4 i Styr- och Reglerteknik för U3/EI2 Målsättning: Använda tumregler för att ställa
Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071118/ Thomas Munther LABORATION 4 i Styr- och Reglerteknik för U3/EI2 Målsättning: Använda tumregler för att ställa
2. Reglertekniska grunder
 2.1 Signaler och system 2.1 Signaler och system Ett system växelverkar med sin omgivning via insignaler, som påverkar systemets beteende utsignaler, som beskriver dess beteende Beroende på sammanhanget
2.1 Signaler och system 2.1 Signaler och system Ett system växelverkar med sin omgivning via insignaler, som påverkar systemets beteende utsignaler, som beskriver dess beteende Beroende på sammanhanget
Avståndsmätare hur användandet kan regleras. Materialet framställt i samarbete mellan: SGF:s Regelkommitté & Tävlingsenhet
 Avståndsmätare hur användandet kan regleras Materialet framställt i samarbete mellan: SGF:s Regelkommitté & Tävlingsenhet Från 2011 tillåtet i vissa SGF-tävlingar SGF Senior Tour Riksmästerskapen Det Nationella
Avståndsmätare hur användandet kan regleras Materialet framställt i samarbete mellan: SGF:s Regelkommitté & Tävlingsenhet Från 2011 tillåtet i vissa SGF-tävlingar SGF Senior Tour Riksmästerskapen Det Nationella
Examples on Analog Transmission
 Examples on Analog Transmission Figure 5.25 Types of analog-to-analog modulation Figure 5.26 Amplitude modulation Figure 5.29 Frequency modulation Modulation och demodulation Baudrate = antal symboler
Examples on Analog Transmission Figure 5.25 Types of analog-to-analog modulation Figure 5.26 Amplitude modulation Figure 5.29 Frequency modulation Modulation och demodulation Baudrate = antal symboler
Kurskod: TAMS28 MATEMATISK STATISTIK Provkod: TEN1 05 June 2017, 14:00-18:00. English Version
 Kurskod: TAMS28 MATEMATISK STATISTIK Provkod: TEN1 5 June 217, 14:-18: Examiner: Zhenxia Liu (Tel: 7 89528). Please answer in ENGLISH if you can. a. You are allowed to use a calculator, the formula and
Kurskod: TAMS28 MATEMATISK STATISTIK Provkod: TEN1 5 June 217, 14:-18: Examiner: Zhenxia Liu (Tel: 7 89528). Please answer in ENGLISH if you can. a. You are allowed to use a calculator, the formula and
F13: Regulatorstrukturer och implementering
 Föreläsning 2 PID-reglering Förra föreläsningen F3: Regulatorstrukturer och implementering 25 Februari, 209 Lunds Universitet, Inst för Reglerteknik. Bodediagram för PID-regulator 2. Metoder för empirisk
Föreläsning 2 PID-reglering Förra föreläsningen F3: Regulatorstrukturer och implementering 25 Februari, 209 Lunds Universitet, Inst för Reglerteknik. Bodediagram för PID-regulator 2. Metoder för empirisk
Reglerteknik AK. Tentamen 24 oktober 2016 kl 8-13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Reglerteknik 1. Kapitel 1, 2, 3, 4. Köp bok och övningshäfte på kårbokhandeln. William Sandqvist william@kth.se
 Reglerteknik 1 Kapitel 1, 2, 3, 4 Köp bok och övningshäfte på kårbokhandeln Reglerteknik 1. Givare för yttertemperatur 2, 3. Givare för inomhustemperaturer Behaglig innetemperatur med hjälp av reglerteknik!
Reglerteknik 1 Kapitel 1, 2, 3, 4 Köp bok och övningshäfte på kårbokhandeln Reglerteknik 1. Givare för yttertemperatur 2, 3. Givare för inomhustemperaturer Behaglig innetemperatur med hjälp av reglerteknik!
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER, TER 2, TER E TID: 4 mars 208, klockan 8-3 KURS: TSRT2, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
TENTAMEN I REGLERTEKNIK Y/D SAL: TER, TER 2, TER E TID: 4 mars 208, klockan 8-3 KURS: TSRT2, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
TSIU61: Reglerteknik. Matematiska modeller Laplacetransformen. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 2 Matematiska modeller Laplacetransformen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 2 Gustaf Hendeby HT1 2017 1 / 21 Innehåll föreläsning 2 ˆ Sammanfattning
TSIU61: Reglerteknik Föreläsning 2 Matematiska modeller Laplacetransformen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 2 Gustaf Hendeby HT1 2017 1 / 21 Innehåll föreläsning 2 ˆ Sammanfattning
Examensarbete i matematik på grundnivå med inriktning mot optimeringslära och systemteori
 Examensarbete i matematik på grundnivå med inriktning mot optimeringslära och systemteori (kurskod SA104X, 15hp, VT15) http://www.math.kth.se/optsyst/grundutbildning/kex/ Förkunskaper Det är ett krav att
Examensarbete i matematik på grundnivå med inriktning mot optimeringslära och systemteori (kurskod SA104X, 15hp, VT15) http://www.math.kth.se/optsyst/grundutbildning/kex/ Förkunskaper Det är ett krav att
Module 6: Integrals and applications
 Department of Mathematics SF65 Calculus Year 5/6 Module 6: Integrals and applications Sections 6. and 6.5 and Chapter 7 in Calculus by Adams and Essex. Three lectures, two tutorials and one seminar. Important
Department of Mathematics SF65 Calculus Year 5/6 Module 6: Integrals and applications Sections 6. and 6.5 and Chapter 7 in Calculus by Adams and Essex. Three lectures, two tutorials and one seminar. Important
EXAM IN MODELING AND SIMULATION (TSRT62)
") EXAM IN MODELING AND SIMULATION (TSRT62) SAL: ISY:s datorsalar TID: Tuesday 25th October 2016, kl. 14.00 18.00 KURS: TSRT62 Modeling and Simulation PROVKOD: DAT1 INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL
EXAM IN MODELING AND SIMULATION (TSRT62) SAL: ISY:s datorsalar TID: Tuesday 25th October 2016, kl. 14.00 18.00 KURS: TSRT62 Modeling and Simulation PROVKOD: DAT1 INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL
Exempel: reglering av en plattreaktor. Varför systemteknik/processreglering? Blockdiagram. Blockdiagram för en (del)process. Exempel: tankprocess
process. Exempel: tankprocess") Systemteknik/reglering Föreläsning Vad är systemteknik oc reglerteknik? Blockdiagram Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling PID-reglering Läsanvisning: Control:..3 Vad
Systemteknik/reglering Föreläsning Vad är systemteknik oc reglerteknik? Blockdiagram Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling PID-reglering Läsanvisning: Control:..3 Vad
Industriella styrsystem, TSIU06. Föreläsning 2
 Industriella styrsystem, TSIU06 Föreläsning 2 Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 1 2(24) Det finns en stor mängd system och processer som behöver styras. Återkopplingsprincipen:
Industriella styrsystem, TSIU06 Föreläsning 2 Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 1 2(24) Det finns en stor mängd system och processer som behöver styras. Återkopplingsprincipen:
Swedish adaptation of ISO TC 211 Quality principles. Erik Stenborg
 Swedish adaptation of ISO TC 211 Quality principles The subject How to use international standards Linguistic differences Cultural differences Historical differences Conditions ISO 19100 series will become
Swedish adaptation of ISO TC 211 Quality principles The subject How to use international standards Linguistic differences Cultural differences Historical differences Conditions ISO 19100 series will become
8 < x 1 + x 2 x 3 = 1, x 1 +2x 2 + x 4 = 0, x 1 +2x 3 + x 4 = 2. x 1 2x 12 1A är inverterbar, och bestäm i så fall dess invers.
 MÄLARDALENS HÖGSKOLA Akademin för utbildning, kultur och kommunikation Avdelningen för tillämpad matematik Examinator: Erik Darpö TENTAMEN I MATEMATIK MAA150 Vektoralgebra TEN1 Datum: 9januari2015 Skrivtid:
MÄLARDALENS HÖGSKOLA Akademin för utbildning, kultur och kommunikation Avdelningen för tillämpad matematik Examinator: Erik Darpö TENTAMEN I MATEMATIK MAA150 Vektoralgebra TEN1 Datum: 9januari2015 Skrivtid:
Reglerteknik I: F1. Introduktion. Dave Zachariah. Inst. Informationsteknologi, Avd. Systemteknik
 Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars
Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars
Windlass Control Panel v1.0.1
 SIDE-POWER Windlass Systems 86-08950 Windlass Control Panel v1.0.1 EN Installation manual Behåll denna manual ombord! S Installations manual SLEIPNER AB Kilegatan 1 452 33 Strömstad Sverige Tel: +46 525
SIDE-POWER Windlass Systems 86-08950 Windlass Control Panel v1.0.1 EN Installation manual Behåll denna manual ombord! S Installations manual SLEIPNER AB Kilegatan 1 452 33 Strömstad Sverige Tel: +46 525
Mekanik FK2002m. Kraft och rörelse I
 Mekanik FK2002m Föreläsning 4 Kraft och rörelse I 2013-09-05 Sara Strandberg SARA STRANDBERG P. 1 FÖRELÄSNING 4 Introduktion Hastighet Langt under 3x10 8 Nara : 3x10 8 Storlek 10 9 Langt over : 10 9 Klassisk
Mekanik FK2002m Föreläsning 4 Kraft och rörelse I 2013-09-05 Sara Strandberg SARA STRANDBERG P. 1 FÖRELÄSNING 4 Introduktion Hastighet Langt under 3x10 8 Nara : 3x10 8 Storlek 10 9 Langt over : 10 9 Klassisk
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen , kl
 REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2013 05 31, kl. 8.00 13.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2013 05 31, kl. 8.00 13.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
Tentamen i Styr- och Reglerteknik, för U3 och EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 12 Augusti kl. 9-13, 29 Sal: - Tillåtna hjälpmedel:
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 12 Augusti kl. 9-13, 29 Sal: - Tillåtna hjälpmedel:
Tentamen i Styr- och Reglerteknik, för U3 och EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 2 december kl. 9-13, 29 Sal: R1122 Tillåtna hjälpmedel:
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 2 december kl. 9-13, 29 Sal: R1122 Tillåtna hjälpmedel:
denna del en poäng. 1. (Dugga 1.1) och v = (a) Beräkna u (2u 2u v) om u = . (1p) och som är parallell
 och v = (a) Beräkna u (2u 2u v) om u = . (1p) och som är parallell") Kursen bedöms med betyg, 4, 5 eller underänd, där 5 är högsta betyg. För godänt betyg rävs minst 4 poäng från uppgifterna -7. Var och en av dessa sju uppgifter an ge maximalt poäng. För var och en av uppgifterna
Kursen bedöms med betyg, 4, 5 eller underänd, där 5 är högsta betyg. För godänt betyg rävs minst 4 poäng från uppgifterna -7. Var och en av dessa sju uppgifter an ge maximalt poäng. För var och en av uppgifterna
Module 1: Functions, Limits, Continuity
 Department of mathematics SF1625 Calculus 1 Year 2015/2016 Module 1: Functions, Limits, Continuity This module includes Chapter P and 1 from Calculus by Adams and Essex and is taught in three lectures,
Department of mathematics SF1625 Calculus 1 Year 2015/2016 Module 1: Functions, Limits, Continuity This module includes Chapter P and 1 from Calculus by Adams and Essex and is taught in three lectures,
Styrteknik : Funktioner och funktionsblock
 PLC2A:1 Variabler och datatyper Allmänt om funktioner och funktionsblock Programmering av funktioner Programmering av funktionsblock PLC2A:2 Variabler i GX IEC Developer Global and Local Variables Variables
PLC2A:1 Variabler och datatyper Allmänt om funktioner och funktionsblock Programmering av funktioner Programmering av funktionsblock PLC2A:2 Variabler i GX IEC Developer Global and Local Variables Variables
Chapter 2: Random Variables
 Chapter 2: Random Variables Experiment: Procedure + Observations Observation is an outcome Assign a number to each outcome: Random variable 1 Three ways to get an rv: Random Variables The rv is the observation
Chapter 2: Random Variables Experiment: Procedure + Observations Observation is an outcome Assign a number to each outcome: Random variable 1 Three ways to get an rv: Random Variables The rv is the observation
TSIU61: Reglerteknik. Sammanfattning från föreläsning 3 (2/4) ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.
 ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.") TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
Module 4 Applications of differentiation
 Department of mathematics SF1625 Calculus 1 Year 2015/2016 Module 4 Applications of differentiation Chapter 4 of Calculus by Adams and Essex. Three lectures, two tutorials, one seminar. Important concepts.
Department of mathematics SF1625 Calculus 1 Year 2015/2016 Module 4 Applications of differentiation Chapter 4 of Calculus by Adams and Essex. Three lectures, two tutorials, one seminar. Important concepts.
Enterprise App Store. Sammi Khayer. Igor Stevstedt. Konsultchef mobila lösningar. Teknisk Lead mobila lösningar
 Enterprise App Store KC TL Sammi Khayer Konsultchef mobila lösningar Familjen håller mig jordnära. Arbetar med ledarskap, mobila strategier och kreativitet. Fotbollen ger energi och fokus. Apple fanboy
Enterprise App Store KC TL Sammi Khayer Konsultchef mobila lösningar Familjen håller mig jordnära. Arbetar med ledarskap, mobila strategier och kreativitet. Fotbollen ger energi och fokus. Apple fanboy
ERE103 Reglerteknik D Tentamen
 CHALMERS TEKNISKA HÖGSKOLA Institutionen för signaler och system System- och reglerteknik ERE03 Reglerteknik D Tentamen 207-0-2 08.30-2.30 Examinator: Jonas Fredriksson, tel 359. Tillåtna hjälpmedel: Typgodkänd
CHALMERS TEKNISKA HÖGSKOLA Institutionen för signaler och system System- och reglerteknik ERE03 Reglerteknik D Tentamen 207-0-2 08.30-2.30 Examinator: Jonas Fredriksson, tel 359. Tillåtna hjälpmedel: Typgodkänd
REGLERTEKNIK, KTH. REGLERTEKNIK AK EL1000, EL1110 och EL1120
 REGLERTEKNIK, KTH REGLERTEKNIK AK EL1000, EL1110 och EL1120 Tentamen 20111017, kl 14:00 19:00 Hjälpmedel: Observandum: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande), räknetabeller,
REGLERTEKNIK, KTH REGLERTEKNIK AK EL1000, EL1110 och EL1120 Tentamen 20111017, kl 14:00 19:00 Hjälpmedel: Observandum: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande), räknetabeller,
TSIU61: Reglerteknik. PID-reglering Specifikationer. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
1. Förpackningsmaskin / Packaging machine
 1. örpackningsmaskin / Packaging machine venska: En förpackningsmaskin ser ut enligt nedanstående skiss. Den inkommande tuben matas fram med motorn. otorn går så länge som dess styrsignal är sann. Om tuben
1. örpackningsmaskin / Packaging machine venska: En förpackningsmaskin ser ut enligt nedanstående skiss. Den inkommande tuben matas fram med motorn. otorn går så länge som dess styrsignal är sann. Om tuben
Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen.
 Reglering Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen. Regulator eller reglerenhet används för att optimera
Reglering Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen. Regulator eller reglerenhet används för att optimera
Radioaktivt sönderfall Atomers (grundämnens) sammansättning
 sammansättning") Radioaktivitet Radioaktivt sönderfall Atomers (grundämnens) sammansättning En atom består av kärna (neutroner + protoner) med omgivande elektroner Kärnan är antingen stabil eller instabil En instabil kärna
Radioaktivitet Radioaktivt sönderfall Atomers (grundämnens) sammansättning En atom består av kärna (neutroner + protoner) med omgivande elektroner Kärnan är antingen stabil eller instabil En instabil kärna
1. Antag att g är en inverterbar funktion definierad på intervallet [0, 4] och att f(x) = g(2x).
![1. Antag att g är en inverterbar funktion definierad på intervallet [0, 4] och att f(x) = g(2x).](/thumbs/99/141641744.jpg "1. Antag att g är en inverterbar funktion definierad på intervallet [0, 4] och att f(x) = g(2x).") Högskolan i Skövde (SK) Tentamen i matematik Kurs: MA152G Matematisk Analys MA123G Matematisk analys för ingenjörer Tentamensdag: 215-8-18 kl 8.3-13.3 Hjälpmedel : Inga hjälpmedel utöver bifogat formelblad.
Högskolan i Skövde (SK) Tentamen i matematik Kurs: MA152G Matematisk Analys MA123G Matematisk analys för ingenjörer Tentamensdag: 215-8-18 kl 8.3-13.3 Hjälpmedel : Inga hjälpmedel utöver bifogat formelblad.
Kurskod: TAMS11 Provkod: TENB 07 April 2015, 14:00-18:00. English Version
 Kurskod: TAMS11 Provkod: TENB 07 April 2015, 14:00-18:00 Examiner: Xiangfeng Yang (Tel: 070 2234765). Please answer in ENGLISH if you can. a. You are allowed to use: a calculator; formel -och tabellsamling
Kurskod: TAMS11 Provkod: TENB 07 April 2015, 14:00-18:00 Examiner: Xiangfeng Yang (Tel: 070 2234765). Please answer in ENGLISH if you can. a. You are allowed to use: a calculator; formel -och tabellsamling
f(x) =, x 1 by utilizing the guidance given by asymptotes and stationary points. cos(x) sin 3 (x) e sin2 (x) dx,
 =, x 1 by utilizing the guidance given by asymptotes and stationary points. cos(x) sin 3 (x) e sin2 (x) dx,") MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA151 Single Variable Calculus, TEN2 Date:
MÄLARDALEN UNIVERSITY School of Education, Culture and Communication Department of Applied Mathematics Examiner: Lars-Göran Larsson EXAMINATION IN MATHEMATICS MAA151 Single Variable Calculus, TEN2 Date:
Tentamen MMG610 Diskret Matematik, GU
 Tentamen MMG610 Diskret Matematik, GU 2017-01-04 kl. 08.30 12.30 Examinator: Peter Hegarty, Matematiska vetenskaper, Chalmers/GU Telefonvakt: Peter Hegarty, telefon: 0766 377 873 Hjälpmedel: Inga hjälpmedel,
Tentamen MMG610 Diskret Matematik, GU 2017-01-04 kl. 08.30 12.30 Examinator: Peter Hegarty, Matematiska vetenskaper, Chalmers/GU Telefonvakt: Peter Hegarty, telefon: 0766 377 873 Hjälpmedel: Inga hjälpmedel,