Mattias Krysander Institutionen för systemteknik
|
|
|
- Karl-Erik Falk
- för 6 år sedan
- Visningar:
Transkript
1 Mattias Krysander Institutionen för systemteknik
 Skrivteknik Projektmodell Etik Handledare Lokaler, utrustning Uppgift Dokumentation")
2 Kursansvariga: Mattias Krysander Diverse annat Programmering Reglerteknik Datorteknik Elektronik Digital tekn. Kursen Ca 2500 timmar (6 pers) Skrivteknik Projektmodell Etik Handledare Lokaler, utrustning Uppgift Dokumentation Presentation Opposition
3 Att öka de praktiska ingenjörsmässiga inslagen. Att stimulera er konstruktionsglädje. Att ge erfarenhet av att utveckla mikrodatorstyrda apparater. Att träna användningen av strukturerade designmetoder. Att ge en god erfarenhet av projektarbete. Att ge förståelse för hur man använder en projektmodell. Att förstå väsentligheten av kommunikation i ett projekt.
4 konstruera en datorstyrd apparat analysera och strukturera digitaltekniska problem använda metoder för strukturerad konstruktion av komplexa digitala system formulera en kravspecifikation utifrån ett projektdirektiv tillämpa kunskaper från tidigare kurser söka upp och tillägna er kompletterande kunskaper utföra ett projektarbete enligt en projektmodell planera ett projektarbete och dokumentera detta i projekt- och tidplaner följa upp och modifiera projekt- och tidplaner aktivt medverka till en väl fungerande projektgrupp ta initiativ och finna kreativa lösningar
5 använda moderna utvecklingshjälpmedel för hårdvarukonstruktion och programmering av mikroprocessorer, samt känna till dessa systems möjligheter och begränsningar utföra felsökning i digitala system med hjälp av moderna mätinstrument redovisa resultatet av ett projektarbete muntligt och skriftligt reflektera över ett utfört projektarbete och föreslå förbättringar kritiskt granska och diskutera ett i tal och i skrift framlagt kandidatarbete beskriva och förklara etiska utmaningar kopplade till ingenjörsyrket och till teknisk utveckling. tillämpa grundläggande normativa etiska teorier, principer och begrepp på konkreta fall och situationer
6 PRA1 (U/G) Projektarbete 11 hp UPG1 (U/G) Skriftlig rapport 2 hp UPG2 (U/G) Etik 1.5 hp UPG3 (U/G) Presentation och opposition 1.5 hp
7 Introduktion Förberedelse Utförande Leverans Utvärdering Introduktion 3*Projektmodell Processorer/miljö Läs max 1 annan kurs parallellt i VT2! Intro. förstudie Konstruktion AVR Mätteknik 3*Etik Skriv Skrivuppgift (förstudie) Kappa Etik Etik Projektplanering Handledning Föreläsningar Seminarier LAB Projektarbete Projektarbete: koda, konstruera, testa. 5 hp 11 hp Teknisk dokumentation Examination Seminarier/opposition Utvärdering
8 Introduktion Förberedelse Utförande Leverans Utvärdering Intro. förstudie Tre per projekt En per projekt =Handledning (ISY och Språkcentrum) Föreläsningar Seminarier Skriv Skrivuppgift (förstudie) Ca 30 stud. per sem. Kappa Examination LAB Projektarbete Ansvariga lärare: Mattias Krysander, ISY och Brigitte Saxtrup Hermansson, Språkcentrum Seminarier/opposition Utvärdering
9 Introduktion Förberedelse Utförande Leverans Utvärdering 3*Etik Kappa Etik Etik Föreläsningar Seminarier LAB Projektarbete Ca 20 stud. per sem. Ansvarig lärare: Erik Gustavsson, IKK Utvärdering
10 Introduktion Förberedelse Utförande Leverans Utvärdering Föreläsningar Seminarier LAB Projektarbete Ansvariga lärare: Brigitte Saxtrup Hermansson, Språkcentrum Samtliga beställare Varje grupp presenterar sitt projekt och opponerar på en annan grupps arbete Seminarier/opposition Utvärdering
11 Introduktion Förberedelse Utförande Leverans Utvärdering Introduktion 3*Projektmodell Processorer/miljö Intro. förstudie Konstruktion AVR Mätteknik Skriv Skrivuppgift (förstudie) Kappa Handledning Föreläsningar Seminarier LAB Projektarbete Projektplanering Projektarbete: koda, konstruera, testa. Teknisk dokumentation Ansvariga lärare: Mattias Krysander ISY Examination Seminarier/opposition Utvärdering

.")
12 Ni ska i en projektgrupp med 6 medlemmar konstruera ett autonomt system. Konstruktionen innehåller: minst tre datorer, standardkretsar, programmerbar logik, analoga interface, olika typer av displayer och ett antal sensorer/kamera. Konstruktionen görs på ett eller flera virkort eller på ett eget tillverkat kretskort (PCB). Stor frihet att påverka projekten själv!

13
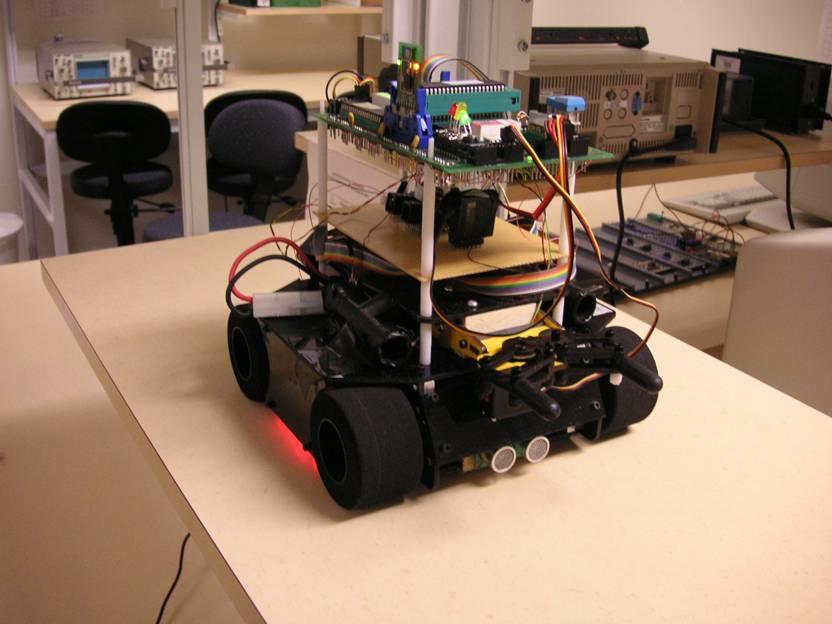
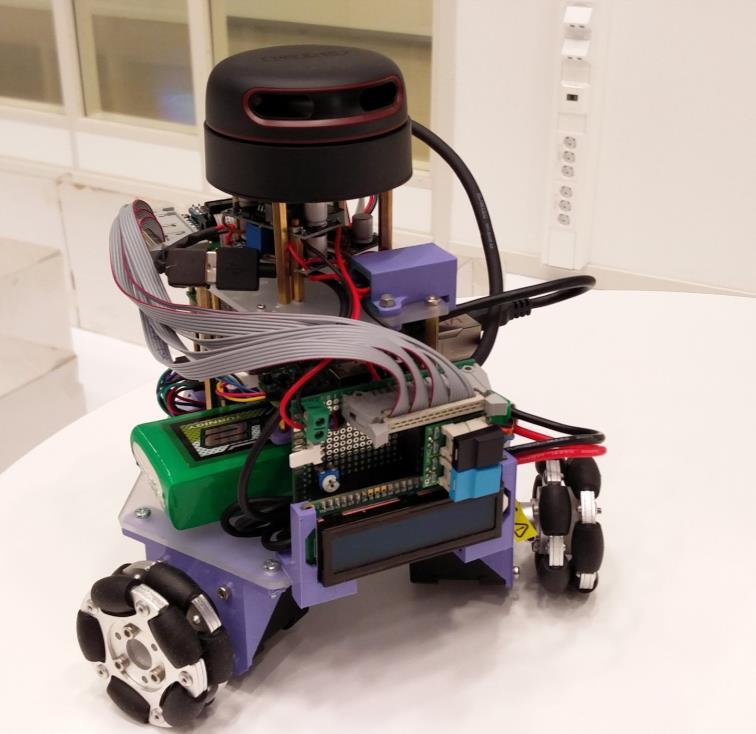
14 Processorer i projekten AVR (enchipsdator) Förmodligen Raspberry Pi Presenteras vid en föreläsning
15 VHDL-laborationerna onödiga. Stor tidsåtgång VHDL-laborationerna och föreläsningar borttagna. Infört BP5a verifiering av baskrav. Reducerat projektomfattningarna. Uppmanar till korrekt tidsredovisning och ansvarsfull rapportering av läget.
16 Sker drygt 2 veckor före slutleverans Visa grundläggande körfall Syften Avdramatisera slutleveransen Säkerställa tidig integration och testning Ordentlig avstämning med beställare med möjlighet att omförhandla krav så att tidsåtgången blir korrekt. Det är normalt att omförhandla krav!
17
18 Projektet kommer att drivas enligt projektmodellen LIPS Före Under Efter FV 5a 5b m.... n.. s Slutrapport Uppdrag Utvärdering Vad? Krav Hur? Planer Systemtest Leverans x Beslutspunkt Design Integration x Milstolpe Kod Kretsschema etc. Test provning
19 Projektet planeras 0 Direktiv x Vad? Krav Före 1 Beslutspunkt 1 2 Hur? Planer 2 Föreläsningar Introduktion 2 tim Projektval 2 tim Kravspec. 2 tim Projektplan 2 tim Processorer 2 tim Konstruktion 2 tim Förstudie. intro 2 tim Lab (obligatoriska) AVR processor/miljö Mätteknik logikan. 2 tim (2 stud) 2 tim (2 stud) x Milstolpe
20 Uppstart av projektet (Valföreläsningen) Projektgruppen skapas av er. Gruppen utser en av medlemmarna till projektledare. Projektbeskrivningar (projektdirektiv) finns på hemsidan. Projektgruppen väljer ett förstahandsval och ett andrahandsval. Jag tilldelar projekt till grupperna.
21 Projektorganisation Beställare Projektledare Handledare Projekt medlemmar Expert Expert Expert Expert
22 Personal i projektet Beställare: Handledare: Mattias Krysander Kent Palmkvist Anders Nilsson Petter Källström Olov Andersson Peter Johansson Experter: LIPS projektmodell Mattias Krysander Processorer, miljöer Alla handledare Analog elektronik Peter Johansson CAD Peter Johansson Reglerteknik Svante Gunnarsson, Mattias Krysander, alla handledare Mekanik Olov Andersson/Peter Johansson Datorseende Karl Holmquist
23 Före Projektidé förstudie förberedelse BP0 BP1 BP2 Support: Föreläsningar Labbar LIPS-mallar Handledare 25/1 kravspecifikation 5/2 överenskommen 22/2 kravspecifikation systemskiss projektplan och tidplan
24 Under 3 4 FV 5a 5b m.... n Systemtest Efter BP3: Tillgång till MUXEN Dygnet runt Design kod Kretsschema etc. Test Provning Integration




25 Tillträde dygnet runt med inpasseringskort. En egen plats med dator och logikanalysator. Ett eget skåp med verktyg, multimeter mm. Extra resursplatser Gemensam diskussionshörna Ett konferensrum Komponentutlämning Planering krävs då alla inte kan vara vid platsen samtidigt Varje grupp har sig tilldelad 2 timmar handledning/vecka
26 WEEK 8-13 Under 15/3 9/4 7/5 22/5 Från före Konstruktion Konstruktion Systemtest Systemtest Optimering Design BP3 BP4 BP5a BP5b Beslutspunkter specifikationer planer Kunddokument rapporter protokoll Designspec. Testspec. Projektplan ny version Teknisk dokumentation Användarmanual Kappa Testprotokoll Statusrapporter, tidrapporter och mötesprotokoll
27 Dokumentation Teknisk dokumentation Användarmanual Kappan som utgör inledningen till kandidatrapporten Framläggning Demonstration och tävlingar Efter.. s Slutrapport Utvärdering Leverans


28 Presentera er tekniska lösning (inklusive förstudier), er produkt och ert sätt att arbeta Mottaga och ge opposition på presentation, teknisk dokumentation och manual. Presentation och opposition kommenteras av lärare från Språkcentrum.


29 Stor golvyta Projicering på vägg och golv Positioneringssystem Flygbur
30 Eventuella korrigeringar Utvärdering Komplett kandidatrapport och källkod Efter 6.. s Slutrapport Utvärdering Leverans Betyg: G eller UK för hela projektgruppen
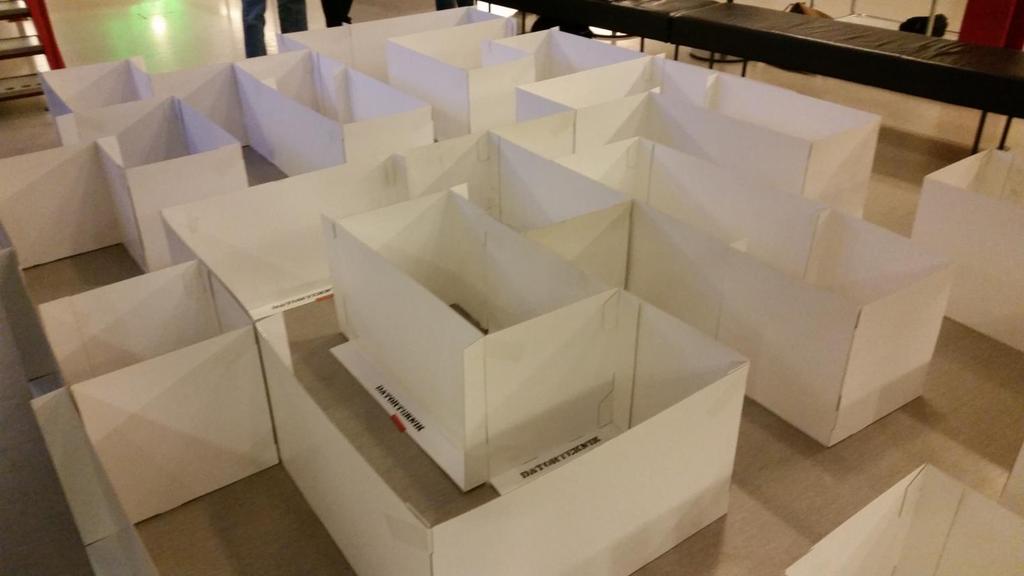
31 Kappa med t ex följande appendix A. Projektdirektiv B. Kravspecifikation C. Banspecifikation och tävlingsregler D. Systemskiss E. Projektplan F. Tidplan G. Förstudie sensor H. Förstudie regler I. Förstudie kommunikation J. Designspecifikation K. Statusrapporter L. Mötesprotokoll M. Tidsredovisning 1 gång/vecka N. Teknisk dokumentation O. Användaranvisning P. Efterstudie Dokumenten ska till slut bli en enhetlig rapport.
32 Väl utfört projektarbete Dokument och rapporter har lämnats in i tid. Projekt- och tidplaner har uppdaterats efter ändrade förutsättningar. Den budgeterade tiden har använts enligt satta prioriteringar. Alla i gruppen ska ha deltagit i arbetet med överenskommet antal timmar (i projektets alla faser). Ett väl genomfört föredrag och opposition. Demonstration av en fungerande apparat. Godkänd dokumentation: kravspecifikation, systemskiss, projektplan, designspecifikation, teknisk dokumentation, skrivuppgifter och kappa. Godkänt på etikmomentet (deltagit i sem o fö). Inlämnad efterstudie, återlämnat material. Godkända laborationer.
33
34 Välj bland Antal grupper Autonom undsättningsrobot max 4 Autonom lagerrobot max 2 Autonom tävlingsbil max 2 Autonom taxibil max 3 Autonom eftersöksdrönare max 2
35
36
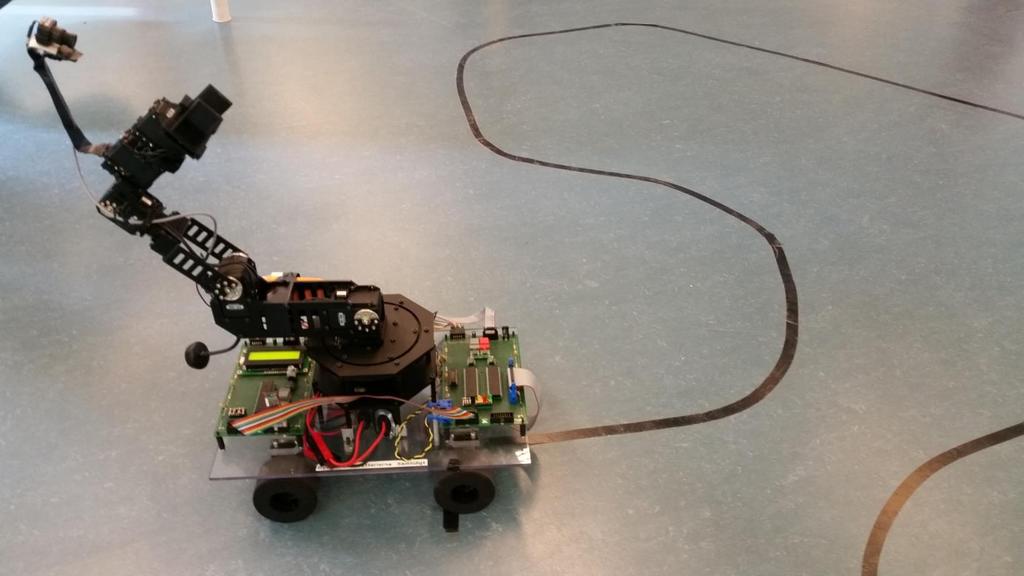
37 Undsättningsrobot - uppdrag Kartlägg banan och lokalisera nödställd. Hämta förnödenhet vid start autonomt. Åk via den kortaste vägen till den nödställde, lämna förnödenhet och återvänd till starten. Kortast tid vinner. start = nödställda
38
39
40 Stor designfrihet i sensorval Kartläggning kräver precision i mätning och odometri Reglering Smala korridorer Omfattande gränssnitt (med automatisk kartuppritning)
41
42


43


44 Hämta ett antal varor. Lagret kan variera men är känt. Varornas upphämtningsplatser specificeras. Varorna kan hämtas en och en eller flera i samma körning. Hinder kan förekomma. Den som snabbast lämnar av varorna på startplatsen vinner.. Banspecifikation för Lagerrobot V plockstationer start Exempel på hur banan i helhet kan se ut: svarta linjer indikerar banan, T former in till kvadrater indik plockstation, 4-vägskorning indikerar hörn, svängningen i nedre högra hörnet indikerar vägen till utlämningsstation och färgad fyrkant indikerar roboten med arm som åker på banan. Redaktör: Kimberley Andersson


45
46 Autonom eller Kinectstyrd upplockning Hämta en och en eller alla på en gång Traveling salesman-problemet Styrning av alla armservon. Inverskinematik för styrning av arm
47
48


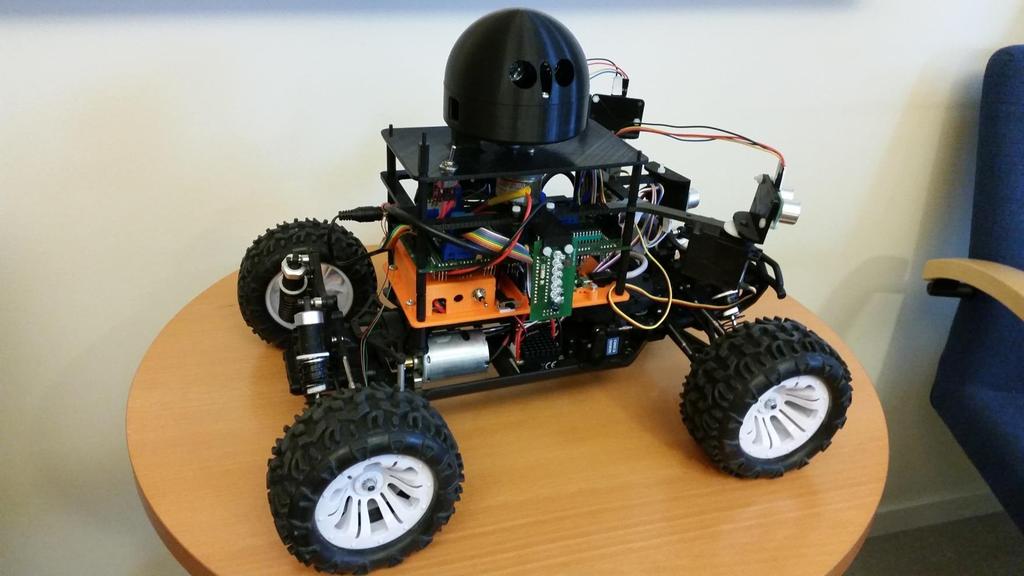
49 Bana med väggar. Snabbast runt ett antal varv vinner. Det kan finnas hinder eller andra fordon. Gränssnitt med grafisk bild av omgivning och planerad färdväg.
50 Roterande laser, mycket data Köra fort, undvika låga hinder, sladd Planera färdväg Reglering för framhjulsstyrt fordon
51

52

53


54 Aut onom taxibil LiU Mata in karta över vägnät med avstånd. Rondeller (1-4 vägar) + 2-filiga vägar Mata in köruppdrag: Kör kortaste vägen A -> B -> C -> D. Undvik eventuella hinder. Snabbast körning vinner.
55 Datorseende Bättre vidvinklig kamera. Viktigt att få upp hastigheten på bildbehandlingen Projicerad bana (kräver halva Visionen) Mjukvara för att mata in karta över vägnätet.
56

57
58 I ett specificerat flygrum finns ett känt antal nödställda. Sök av området efter nödställda. Personer markeras med qr-koder, olika för nödställda och icke-nödställda. Gå ner och hovra över nödställd samt beräkna exakt position. När samtliga nödställda är positionerade återvänd till startplatsen.
59 PCB nödvändigt. Reglering kritisk (höjd, fram/bak, vänster/höger, rotation) Strikta tidskrav Krashrisk vid testning Positioneringssystem (kräver tillgång till hela arenan) Bildbehandling Svårare projekt


60 Krav på att kunna spara mätdata. Mätdata kan användas för Felsökning Parameter-tuning Prestandautvärdering och verifiering
61 Val av projekt och grupper. Viktigt att vara där!
62
63
Kandidatprojekt i elektronik. Kandidatprojekt i elektronik, 16 hp Kursansvariga: Tomas Svensson, Mattias Krysander
 Kandidatprojekt i elektronik, 16 hp Kursansvariga: Tomas Svensson, Mattias Krysander Diverse annat Datorteknik Elektronik Digital tekn. Ca 1800 timmar (11 hp, 6 pers) Kursen Skrivteknik Projektmodell Etik
Kandidatprojekt i elektronik, 16 hp Kursansvariga: Tomas Svensson, Mattias Krysander Diverse annat Datorteknik Elektronik Digital tekn. Ca 1800 timmar (11 hp, 6 pers) Kursen Skrivteknik Projektmodell Etik
Kandidatprojekt i elektronik. Kandidatprojekt i elektronik, 16 hp
 Kandidatprojekt i elektronik, 16 hp Kandidatprojekt i elektronik Kursansvarig: Tomas Svensson Diverse annat Datorteknik Elektronik Digital tekn. Ca 1800 timmar (11 hp, 6 pers) Kursen Skrivteknik Projektmodell
Kandidatprojekt i elektronik, 16 hp Kandidatprojekt i elektronik Kursansvarig: Tomas Svensson Diverse annat Datorteknik Elektronik Digital tekn. Ca 1800 timmar (11 hp, 6 pers) Kursen Skrivteknik Projektmodell
Kandidatprojekt i elektronik Efter fullgjord kurs ska ni kunna: Kandidatprojekt i elektronik, 16 hp Kursansvarig: Tomas Svensson
 Kandidatprojekt i elektronik, 16 hp Kursansvarig: Tomas Svensson Diverse annat Datorteknik Elektronik Digital tekn. Ca 1800 timmar (11 hp, 6 pers) Kursen Skrivteknik Projektmodell Etik VHDL Handledare
Kandidatprojekt i elektronik, 16 hp Kursansvarig: Tomas Svensson Diverse annat Datorteknik Elektronik Digital tekn. Ca 1800 timmar (11 hp, 6 pers) Kursen Skrivteknik Projektmodell Etik VHDL Handledare
Välkomna till KMM! KMM. KMM - lärandemål Efter fullgjord kurs ska ni bland annat kunna:
 Elektronik Digital tekn. Välkomna till KMM! Datorkonstr. Datorteknik Ca 1000 timmar Kursansvarig: Tomas Svensson Projekt Projektmodell Diverse Handledare Lokaler, utrustning Uppgift Övergripande kursmål:
Elektronik Digital tekn. Välkomna till KMM! Datorkonstr. Datorteknik Ca 1000 timmar Kursansvarig: Tomas Svensson Projekt Projektmodell Diverse Handledare Lokaler, utrustning Uppgift Övergripande kursmål:
Välkomna till KMM! KMM. KMM - lärandemål Efter fullgjord kurs ska ni bland annat kunna:
 Elektronik Digital tekn. Välkomna till KMM! Datorkonstr. Datorteknik Ca 1000 timmar Kursansvarig: Tomas Svensson Projekt Projektmodell Diverse Handledare Lokaler, utrustning Uppgift Övergripande kursmål:
Elektronik Digital tekn. Välkomna till KMM! Datorkonstr. Datorteknik Ca 1000 timmar Kursansvarig: Tomas Svensson Projekt Projektmodell Diverse Handledare Lokaler, utrustning Uppgift Övergripande kursmål:
Välkomna till KMM! KMM. KMM - lärandemål Efter fullgjord kurs ska ni bland annat kunna:
 Elektronik Digital tekn. Välkomna till KMM! Datorkonstr. Datorteknik Ca 1000 timmar Kursansvarig: Anders Nilsson Projekt Projektmodell Diverse Handledare Lokaler, utrustning Uppgift Övergripande kursmål:
Elektronik Digital tekn. Välkomna till KMM! Datorkonstr. Datorteknik Ca 1000 timmar Kursansvarig: Anders Nilsson Projekt Projektmodell Diverse Handledare Lokaler, utrustning Uppgift Övergripande kursmål:
LIPS Kravspecifikation. Institutionen för systemteknik Mattias Krysander
 LIPS Kravspecifikation Institutionen för systemteknik Mattias Krysander Kandidatprojekt 2019 Antal Autonom taxibil (2, 5-personersgrupper) 3 Autonom eftersöksdrönare 2 Autonom undsättningsrobot 2 Autonom
LIPS Kravspecifikation Institutionen för systemteknik Mattias Krysander Kandidatprojekt 2019 Antal Autonom taxibil (2, 5-personersgrupper) 3 Autonom eftersöksdrönare 2 Autonom undsättningsrobot 2 Autonom
LIPS 1, 2002 Lätt Interaktiv Projektstyrningsmodell
 LIPS 1, 2002 Lätt Interaktiv Projektstyrningsmodell Christian Krysander Tomas Svensson Översikt av Lips Projektstyrningsmodell Utvecklingsmodell Vad är ett projekt? Definition av ett projekt: En grupp
LIPS 1, 2002 Lätt Interaktiv Projektstyrningsmodell Christian Krysander Tomas Svensson Översikt av Lips Projektstyrningsmodell Utvecklingsmodell Vad är ett projekt? Definition av ett projekt: En grupp
Innehåll. Projekt Greed. Projekt definition. Projekt Greed En introduktion till projektmodellen LIPs
 Innehåll Projekt Greed En introduktion till projektmodellen LIPs Före-fasen Under-fasen Efter-fasen Projekt Greed Utveckla en applikation för mobiltelefoner av tärningsspelet Greed Löses i projektform
Innehåll Projekt Greed En introduktion till projektmodellen LIPs Före-fasen Under-fasen Efter-fasen Projekt Greed Utveckla en applikation för mobiltelefoner av tärningsspelet Greed Löses i projektform
Före Kravspecifikationen
 projektidé BP0 förstudie BP1 förberedelse BP2 Kravspecifikationen Beskriver VAD som ska utföras i projektet? projektdirektiv beslutspunkter specifikationer planer kunddokument rapporter protokoll M beställarens
projektidé BP0 förstudie BP1 förberedelse BP2 Kravspecifikationen Beskriver VAD som ska utföras i projektet? projektdirektiv beslutspunkter specifikationer planer kunddokument rapporter protokoll M beställarens
LiTH Autonom styrning av mobil robot 2007-02-15. Projektplan. Martin Elfstadius & Fredrik Danielsson. Version 1.0
 Projektplan Martin Elfstadius & Fredrik Danielsson Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar
Projektplan Martin Elfstadius & Fredrik Danielsson Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar
LIPs Daniel Axehill ChrKr Projektdirektiv_Saab_v3 CKr
 Daniel Axehill 2006-01-19 Sida 1 Projektnamn Beställare Daniel Axehill, ISY Projektledare Student Projektbeslut Torbjörn Crona, Daniel Axehill Projekttid Läsperiod 3-4, vårterminen 2006. Projektet klart
Daniel Axehill 2006-01-19 Sida 1 Projektnamn Beställare Daniel Axehill, ISY Projektledare Student Projektbeslut Torbjörn Crona, Daniel Axehill Projekttid Läsperiod 3-4, vårterminen 2006. Projektet klart
Projektarbete. Johan Eliasson
 Projektarbete Johan Eliasson Projekt Definition: En grupp av projektdeltagare utför under ledning av en projektledare en klart definierad uppgift, på en viss tid, med begränsade resurser Resurserna kan
Projektarbete Johan Eliasson Projekt Definition: En grupp av projektdeltagare utför under ledning av en projektledare en klart definierad uppgift, på en viss tid, med begränsade resurser Resurserna kan
Projektplan. LiTH Reglering av Avgaser, Trottel och Turbo 2008-02-11. Fredrik Petersson Version 1.0. Status. Reglerteknisk Projektkurs RATT LIPs
 Fredrik Petersson Version 1.0 Status Granskad 2008-02-11 NL, PA Godkänd 1 2 PROJEKTIDENTITET VT 2008, RATT-Gruppen Linköpings tekniska högskola, ISY- Fordonssystem Namn Ansvar Telefon E-post Daniel Ahlberg
Fredrik Petersson Version 1.0 Status Granskad 2008-02-11 NL, PA Godkänd 1 2 PROJEKTIDENTITET VT 2008, RATT-Gruppen Linköpings tekniska högskola, ISY- Fordonssystem Namn Ansvar Telefon E-post Daniel Ahlberg
Projektplan. LiTH Segmentering av MR-bilder med ITK Anders Eklund. Version 1.0. Status. Bilder och grafik projektkurs, CDIO MCIV LIPs
 Segmentering av MR-bilder med ITK 2006-02-02 Projektplan Version 1.0 Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 1 PROJEKTIDENTITET MCIV 2006 VT Linköpings Tekniska Högskola,
Segmentering av MR-bilder med ITK 2006-02-02 Projektplan Version 1.0 Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 1 PROJEKTIDENTITET MCIV 2006 VT Linköpings Tekniska Högskola,
LIPs Martin Lindfors ChrKr Projdir2017_sbd.doc CKr
 Martin Lindfors 2017-08-22 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Minröjningssystem Martin Lindfors, ISY Student Torbjörn Crona och Martin Lindfors Läsperiod
Martin Lindfors 2017-08-22 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Minröjningssystem Martin Lindfors, ISY Student Torbjörn Crona och Martin Lindfors Läsperiod
Projektdirektiv Christian Andersson Naesseth Sida 1
 Christian Andersson Naesseth 2018-08-30 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Drönarprojekt Visionen Christian Andersson Naesseth, ISY Studenter Gustaf Hendeby
Christian Andersson Naesseth 2018-08-30 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Drönarprojekt Visionen Christian Andersson Naesseth, ISY Studenter Gustaf Hendeby
Projektdirektiv Oskar Ljungqvist Sida 1. Kund/Examinator: Daniel Axehill, Reglerteknik/LiU
 2018-08-30 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering, ISY Student, ISY Läsperiod 1-2, HT 2018. Projektet klart senast vid projektkonferensen. Löpande rapportering:
2018-08-30 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering, ISY Student, ISY Läsperiod 1-2, HT 2018. Projektet klart senast vid projektkonferensen. Löpande rapportering:
Dokumentation och presentation av ert arbete
 Dokumentation och presentation av ert arbete Reglerteknik Linköpings universitet Agenda Kursens mål Projektmodellen LIPS och dess användning i kursen Olika former av redovisning av ert arbete Avslutande
Dokumentation och presentation av ert arbete Reglerteknik Linköpings universitet Agenda Kursens mål Projektmodellen LIPS och dess användning i kursen Olika former av redovisning av ert arbete Avslutande
LIPs Andreas Bergström ChrKr Projektdirektiv16_Toyota_v2.0.doc CKr
 Andreas Bergström 2016-09-08 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Planering och Sensorfusion för Autonom Truck Andreas Bergström, ISY Student Emil Selse och
Andreas Bergström 2016-09-08 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Planering och Sensorfusion för Autonom Truck Andreas Bergström, ISY Student Emil Selse och
Dokumentation och presentation av ert arbete
 Dokumentation och presentation av ert arbete Reglerteknik Linköpings universitet Dagens föreläsning Första timmen Kursens mål Projektmodellen LIPS och dess användning i kursen Olika former av redovisning
Dokumentation och presentation av ert arbete Reglerteknik Linköpings universitet Dagens föreläsning Första timmen Kursens mål Projektmodellen LIPS och dess användning i kursen Olika former av redovisning
Projektdirektiv. Rikard Falkeborn Sida 1
 2007 12 03 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Självetablerande sensornätverk med GPS och 3G, ISY Student David Lindgren, Läsperiod 3 4, vårterminen 2008.
2007 12 03 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Självetablerande sensornätverk med GPS och 3G, ISY Student David Lindgren, Läsperiod 3 4, vårterminen 2008.
Dokumentation och presentation av ert arbete. Kursens mål. Lärare Projektmedlemmar. Studenter Extern personal. Projektfaser. Projektroller.
 Agenda Dokumentation och presentation av ert arbete Kursens mål Projektroller Reglerteknik Linköpings universitet Brytpunkter Mer detaljer om slutdokumenten Kursens mål 1. Lära sig jobba i projekt Projektroll
Agenda Dokumentation och presentation av ert arbete Kursens mål Projektroller Reglerteknik Linköpings universitet Brytpunkter Mer detaljer om slutdokumenten Kursens mål 1. Lära sig jobba i projekt Projektroll
LIPs Isak Nielsen ChrKr Projektdirektiv13_ROV.doc CKr
 Isak Nielsen 2013/08/28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Remotely Operated Underwater Vehicle Isak Nielsen, ISY Student Micael Derelöv och Isak Nielsen
Isak Nielsen 2013/08/28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Remotely Operated Underwater Vehicle Isak Nielsen, ISY Student Micael Derelöv och Isak Nielsen
Reglerteknisk projektkurs TSRT10
 Reglerteknisk projektkurs TSRT10 daniel@isy.liu.se Reglerteknik Linköpings universitet Vad innebär CDIO? Conceive Tänka ut, planera och specificera Design - Konstruera Implement Realisera/implementera
Reglerteknisk projektkurs TSRT10 daniel@isy.liu.se Reglerteknik Linköpings universitet Vad innebär CDIO? Conceive Tänka ut, planera och specificera Design - Konstruera Implement Realisera/implementera
TANA81: Matematikprojekt
 TANA81: Matematikprojekt Period: VT1 och VT2 2015 Kursansvarig: Fredrik Berntsson (fredrik.berntsson@liu.se) Kurshemsida: http://courses.mai.liu.se/gu/tana81/ Typeset by FoilTEX 1 TANA81 Scenario Inför
TANA81: Matematikprojekt Period: VT1 och VT2 2015 Kursansvarig: Fredrik Berntsson (fredrik.berntsson@liu.se) Kurshemsida: http://courses.mai.liu.se/gu/tana81/ Typeset by FoilTEX 1 TANA81 Scenario Inför
Dokumentation och presentation av ert arbete
 Dokumentation och presentation av ert arbete Daniel Axehill Reglerteknik Linköpings universitet Dagens föreläsning Första timmen Kursens mål. Projektmodellen LIPS och dess användning i kursen. Olika former
Dokumentation och presentation av ert arbete Daniel Axehill Reglerteknik Linköpings universitet Dagens föreläsning Första timmen Kursens mål. Projektmodellen LIPS och dess användning i kursen. Olika former
Reglerteknisk projektkurs TSRT10
 Reglerteknisk projektkurs TSRT10 Daniel Axehill daniel.axehill@liu.se Reglerteknik Linköpings universitet Vad innebär CDIO? Conceive Tänka ut, planera och specificera Design Konstruera Implement Realisera/implementera
Reglerteknisk projektkurs TSRT10 Daniel Axehill daniel.axehill@liu.se Reglerteknik Linköpings universitet Vad innebär CDIO? Conceive Tänka ut, planera och specificera Design Konstruera Implement Realisera/implementera
Projektplan. Modellbaserad diagnos av motortestcell 07-05-10. Fredrik Johansson Version 1.0. Status. TSRT71 Modellbaserad diagnos av motortestcell IPs
 07-05-10 Projektplan Version 1.0 Status Granskad Godkänd TSRT71 Modellbaserad diagnos av motortestcell IPs PPDiagnos10.odt 1 PROJEKTIDENTITET Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-post
07-05-10 Projektplan Version 1.0 Status Granskad Godkänd TSRT71 Modellbaserad diagnos av motortestcell IPs PPDiagnos10.odt 1 PROJEKTIDENTITET Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-post
LiTH. WalkCAM 2007/05/15. Testplan. Mitun Dey Version 1.0. Status. Granskad. Godkänd. Reglerteknisk projektkurs WalkCAM LIPs
 Testplan Mitun Dey Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Reglerteknisk projektkurs, WalkCAM, 2007/VT Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Henrik Johansson Projektledare
Testplan Mitun Dey Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Reglerteknisk projektkurs, WalkCAM, 2007/VT Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Henrik Johansson Projektledare
LiTH Segmentering av MR-bilder med ITK Efterstudie MCIV. Anders Eklund. Status
 Segmentering av MR-bilder med ITK 2006-05-15 Efterstudie MCIV Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 1 Segmentering av MR-bilder med ITK 2006-05-15 PROJEKTIDENTITET MCIV
Segmentering av MR-bilder med ITK 2006-05-15 Efterstudie MCIV Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 1 Segmentering av MR-bilder med ITK 2006-05-15 PROJEKTIDENTITET MCIV
Projektdirektiv Hanna Nyqvist Sida 1
 2014-08-27 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Minröjningsbandvagn, ISY Student Torbjörn Crona, Läsperiod 1-2, HT 2014. Projektet klart senast vid projektkonferensen.
2014-08-27 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Minröjningsbandvagn, ISY Student Torbjörn Crona, Läsperiod 1-2, HT 2014. Projektet klart senast vid projektkonferensen.
Reglerteknisk projektkurs TSRT10
 Reglerteknisk projektkurs TSRT10 Daniel Axehill daniel@isy.liu.se Reglerteknik Linköpings universitet Vad innebär CDIO? Conceive Tänka ut, planera och specificera Design - Konstruera Implement Realisera/implementera
Reglerteknisk projektkurs TSRT10 Daniel Axehill daniel@isy.liu.se Reglerteknik Linköpings universitet Vad innebär CDIO? Conceive Tänka ut, planera och specificera Design - Konstruera Implement Realisera/implementera
LIPs Fredrik Ljungberg ChrKr Projektdirektiv18_ROV.doc CKr
 Fredrik Ljungberg 2018-08-28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Parter Projektets bakgrund och Remotely Operated Underwater Vehicle Fredrik Ljungberg, ISY
Fredrik Ljungberg 2018-08-28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Parter Projektets bakgrund och Remotely Operated Underwater Vehicle Fredrik Ljungberg, ISY
Ingenjörsprojekt, TFYY Föreläsning 3. Urban Forsberg Institutionen för Fysik, Kemi och Biologi, IFM
 Ingenjörsprojekt, TFYY51 2018 Föreläsning 3 Urban Forsberg Institutionen för Fysik, Kemi och Biologi, IF Urban.forsberg@liu.se Föreläsning 3 Projektet, före-och under-fas Status! Saknar någon en grupp?
Ingenjörsprojekt, TFYY51 2018 Föreläsning 3 Urban Forsberg Institutionen för Fysik, Kemi och Biologi, IF Urban.forsberg@liu.se Föreläsning 3 Projektet, före-och under-fas Status! Saknar någon en grupp?
Testplan. Redaktör: Sofie Dam Version 0.1. Status. Planering och sensorfusion för autonom truck Granskad Dokumentansvarig - Godkänd
 Redaktör: Sofie Dam Version 0.1 Status Granskad Dokumentansvarig - Godkänd 1 GruppTruck Projektidentitet 2017/HT, GruppTruck Tekniska högskolan vid Linköpings universitet, ISY Gruppdeltagare Namn Ansvar
Redaktör: Sofie Dam Version 0.1 Status Granskad Dokumentansvarig - Godkänd 1 GruppTruck Projektidentitet 2017/HT, GruppTruck Tekniska högskolan vid Linköpings universitet, ISY Gruppdeltagare Namn Ansvar
Information TBMT41. Göran Salerud Version Status
 Information TBMT41 Göran Salerud Version 1.85 Status Granskad Godkänd Marcus Larsson Göran Salerud Dokumenthistorik version datum utförda förändringar utförda av granskad 1.85 2017-02-05 Tidplan uppdaterad
Information TBMT41 Göran Salerud Version 1.85 Status Granskad Godkänd Marcus Larsson Göran Salerud Dokumenthistorik version datum utförda förändringar utförda av granskad 1.85 2017-02-05 Tidplan uppdaterad
Dokumentation och presentation av ert arbete
 Dokumentation och presentation av ert arbete Daniel Axehill Dagens föreläsning Kursens mål. Projektmodellen LIPS och dess användning i kursen. Olika former av redovisning av ert arbete. Allmänna tips och
Dokumentation och presentation av ert arbete Daniel Axehill Dagens föreläsning Kursens mål. Projektmodellen LIPS och dess användning i kursen. Olika former av redovisning av ert arbete. Allmänna tips och
Rapportering som krävs utöver LIPS-dokumenten: poster föredrag där projektets genomförande och resultat beskrivs hemsida som beskriver projektet
 Sida 1 Projektnamn Utveckling och implementering av regulator för styrning av gimbalmonterade sensorer i UAV:er Beställare Jon Kronander (ISY - Reglerteknik) Projektledare Student Projektbeslut Morgan
Sida 1 Projektnamn Utveckling och implementering av regulator för styrning av gimbalmonterade sensorer i UAV:er Beställare Jon Kronander (ISY - Reglerteknik) Projektledare Student Projektbeslut Morgan
Dokumentation och presentation av ert arbete
 Dokumentation och presentation av ert arbete Daniel Axehill Reglerteknik Linköpings universitet Dagens föreläsning Första timmen Kursens mål. Projektmodellen LIPS och dess användning i kursen. Olika former
Dokumentation och presentation av ert arbete Daniel Axehill Reglerteknik Linköpings universitet Dagens föreläsning Första timmen Kursens mål. Projektmodellen LIPS och dess användning i kursen. Olika former
Projektplan. LiTH AMASE 2006-02-15 Accurate Multipoint Acquisition from Stereovision Equipment. Johan Hallenberg Version 1.0
 AMASE 2006-02-15 Projektplan Johan Hallenberg Version 1.0 Granskad Godkänd 1 PROJEKTIDENTITET VT2006, AMASE Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mikael Karelid kundansvarig (KUN)
AMASE 2006-02-15 Projektplan Johan Hallenberg Version 1.0 Granskad Godkänd 1 PROJEKTIDENTITET VT2006, AMASE Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mikael Karelid kundansvarig (KUN)
LiTH Autonom styrning av mobil robot 2007-03-26 Testplan Version 1.0 TSRT71-Reglertekniskt projektkurs Anders Lindgren L IPs
 Testplan Version 1.0 Status Granskad Godkänd TSRT71-Reglertekniskt projektkurs LIPs PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon
Testplan Version 1.0 Status Granskad Godkänd TSRT71-Reglertekniskt projektkurs LIPs PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon
LIPs Andreas Bergström ChrKr Projektdirektiv17_Toyota_v1.0.doc1 CKr
 Andreas Bergström 2017-08-22 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Planering och sensorfusion för autonom truck Andreas Bergström, ISY Student Magnus Persson
Andreas Bergström 2017-08-22 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Planering och sensorfusion för autonom truck Andreas Bergström, ISY Student Magnus Persson
Projektplanering. Mattias Krysander Institutionen för systemteknik
 Projektplanering Mattias Krysander 2019-02-06 Institutionen för systemteknik 2 Före-fasen Före Projektidé förstudie förberedelse BP0 BP1 BP2 projektdirektiv 25/1 kravspecifikation 6/2 överenskommen 22/2
Projektplanering Mattias Krysander 2019-02-06 Institutionen för systemteknik 2 Före-fasen Före Projektidé förstudie förberedelse BP0 BP1 BP2 projektdirektiv 25/1 kravspecifikation 6/2 överenskommen 22/2
Kurs-PM fo r HI1028, Projektkurs inom programvaruutveckling, VT16
 Kurs-PM fo r HI1028, Projektkurs inom programvaruutveckling, VT16 Mål Kursen skall ge studenten träning i att utveckla en större programvara. Arbetet utförs i projektform. Projektet skall ge grundläggande
Kurs-PM fo r HI1028, Projektkurs inom programvaruutveckling, VT16 Mål Kursen skall ge studenten träning i att utveckla en större programvara. Arbetet utförs i projektform. Projektet skall ge grundläggande
LiTH, Reglerteknik Saab Dynamics. Testplan Collision avoidance för autonomt fordon Version 1.0
 LiTH, Reglerteknik Saab Dynamics Testplan Collision avoidance för autonomt fordon Version 1.0 Torbjörn Lindström 3 maj 2005 Granskad Godkänd Collision avoidance för autonomt fordon i Sammanfattning Testplan
LiTH, Reglerteknik Saab Dynamics Testplan Collision avoidance för autonomt fordon Version 1.0 Torbjörn Lindström 3 maj 2005 Granskad Godkänd Collision avoidance för autonomt fordon i Sammanfattning Testplan
Projektplan. LiTH Autonom bandvagn med stereokamera 2010-09-24. Henrik Berggren Version 1.0. Status. TSRT10 8Yare LIPs. Granskad
 Henrik Berggren Version 1.0 Status Granskad Godkänd Jonas Callmer 2010-09-24 1 PROJEKTIDENTITET 2010/HT, 8Yare Linköpings tekniska högskola, institutionen för systemteknik (ISY) Namn Ansvar Telefon E-post
Henrik Berggren Version 1.0 Status Granskad Godkänd Jonas Callmer 2010-09-24 1 PROJEKTIDENTITET 2010/HT, 8Yare Linköpings tekniska högskola, institutionen för systemteknik (ISY) Namn Ansvar Telefon E-post
Datastrukturer och algoritmer
 Innehåll Föreläsning En introduktion till projektmodellen LIPS Hashtabeller Att läsa: Dessa bilder + kapitel. Projekt definition Projekt En grupp av projektdeltagare utför under ledning av en projektledare
Innehåll Föreläsning En introduktion till projektmodellen LIPS Hashtabeller Att läsa: Dessa bilder + kapitel. Projekt definition Projekt En grupp av projektdeltagare utför under ledning av en projektledare
Linköpings universitet
 Linköpings universitet Ingenjörsprojekt, TFYY51, F4 130913 Urban Forsberg Föreläsning 4 Projektet, före- och under-fas 2 Status! Har alla en grupp? Saknas några personer i någon grupp? Har alla grupper
Linköpings universitet Ingenjörsprojekt, TFYY51, F4 130913 Urban Forsberg Föreläsning 4 Projektet, före- och under-fas 2 Status! Har alla en grupp? Saknas några personer i någon grupp? Har alla grupper
Kravspecifikation. LiTH Segmentering av MR-bilder med ITK Anders Eklund Version 1.0. Status
 2006-02-02 Kravspecifikation Version.0 Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 2006-02-02 PROJEKTIDENTITET MCIV 2006 VT Linköpings Tekniska Högskola, CVL Namn Ansvar Telefon
2006-02-02 Kravspecifikation Version.0 Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 2006-02-02 PROJEKTIDENTITET MCIV 2006 VT Linköpings Tekniska Högskola, CVL Namn Ansvar Telefon
Projektplan David Sandberg Version 1.0
 Projektplan David Sandberg Version 1.0 Status Granskad Godkänd Projektidentitet Grupp 2, 2010/HT Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-mail David Sandberg Projektledare 073-9504672 davsa746@student.liu.se
Projektplan David Sandberg Version 1.0 Status Granskad Godkänd Projektidentitet Grupp 2, 2010/HT Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-mail David Sandberg Projektledare 073-9504672 davsa746@student.liu.se
Projektplan Autonomstyrning av gaffeltruck
 Version 1.0 L.A.M.A 12 oktober 2016 Status Granskad Samtliga projektmedlemmar 2016-09-21 Godkänd Andreas Bergström 2016-09-23 Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare:
Version 1.0 L.A.M.A 12 oktober 2016 Status Granskad Samtliga projektmedlemmar 2016-09-21 Godkänd Andreas Bergström 2016-09-23 Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare:
Testprotokoll. Redaktör: Sofie Dam Version 0.1. Status. Planering och sensorfusion för autonom truck Granskad Dokumentansvarig - Godkänd
 Redaktör: Sofie Dam Version 0.1 Status Granskad Dokumentansvarig - Godkänd 1 GruppTruck Projektidentitet 2017/HT, GruppTruck Tekniska högskolan vid Linköpings universitet, ISY Gruppdeltagare Namn Ansvar
Redaktör: Sofie Dam Version 0.1 Status Granskad Dokumentansvarig - Godkänd 1 GruppTruck Projektidentitet 2017/HT, GruppTruck Tekniska högskolan vid Linköpings universitet, ISY Gruppdeltagare Namn Ansvar
Linköpings universitet
 Linköpings universitet Ingenjörsprojekt, TFYY51 Slutleverans, Projektkonferens, Dokumentation Urban Forsberg Instutionen för Fysik, Kemi och Biologi, IFM Slutleveransen Slutleveransen beskrivs i kap 5.4
Linköpings universitet Ingenjörsprojekt, TFYY51 Slutleverans, Projektkonferens, Dokumentation Urban Forsberg Instutionen för Fysik, Kemi och Biologi, IFM Slutleveransen Slutleveransen beskrivs i kap 5.4
Efterstudie. Redaktör: Jenny Palmberg Version 1.0. Status. LiTH Fordonssimulator. Granskad Godkänd. TSRT71 Jenny Palmberg
 Efterstudie Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET Grupp 1, 2006/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Simon Danielsson Kvalitetsansvarig
Efterstudie Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET Grupp 1, 2006/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Simon Danielsson Kvalitetsansvarig
Kravspecifikation Fredrik Berntsson Version 1.3
 Kravspecifikation Fredrik Berntsson Version 1.3 Status Granskad FB 2017-01-27 Godkänd FB 2017-01-27 Dokumenthistorik Version Datum Utförda ändringar Utförda av Granskad 1.0 2014-01-15 Första versionen
Kravspecifikation Fredrik Berntsson Version 1.3 Status Granskad FB 2017-01-27 Godkänd FB 2017-01-27 Dokumenthistorik Version Datum Utförda ändringar Utförda av Granskad 1.0 2014-01-15 Första versionen
RESULTAT, AVSLUT OCH UPPFÖLJNING. Stefan Berglund
 RESULTAT, AVSLUT OCH UPPFÖLJNING Stefan Berglund Projektet närmar sig sitt slut men vad händer då? och sedan? INFÖRANDET Avslutande del av genomförandefasen? Egen fas? Inledande del av projektavslutet?
RESULTAT, AVSLUT OCH UPPFÖLJNING Stefan Berglund Projektet närmar sig sitt slut men vad händer då? och sedan? INFÖRANDET Avslutande del av genomförandefasen? Egen fas? Inledande del av projektavslutet?
Projektplan. Redaktör: Patrik Molin Version 1.0. Mobile Scout. Status. LiTH Granskad Godkänd. TSRT71 Patrik Molin
 Projektplan Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET 2009/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Martin Larsson Projektledare (ML)
Projektplan Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET 2009/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Martin Larsson Projektledare (ML)
Projektplan. Flygande Autonomt Spaningsplan. Version 1.0. Dokumentansva Datum: 13 februari Dokumentansvarig: Henrik Abrahamsson.
 Flygande Autonomt Spaningsplan Version 1.0 Dokumentansvarig: Henrik Abrahamsson Dokumentansva Datum: 13 februari 2008 Status Granskad Godkänd Projektidentitet Hemsida: Kund: LiTH http://www.isy.liu.se/edu/projekt/tsrt71/2008/flygproj2008/
Flygande Autonomt Spaningsplan Version 1.0 Dokumentansvarig: Henrik Abrahamsson Dokumentansva Datum: 13 februari 2008 Status Granskad Godkänd Projektidentitet Hemsida: Kund: LiTH http://www.isy.liu.se/edu/projekt/tsrt71/2008/flygproj2008/
ESSF05 Elektronikprojekt och hållbar utveckling
 ESSF05 Elektronikprojekt och hållbar utveckling Kursen elektronikprojekt och hållbar utveckling utgör avslutningen på den obligatoriska delen av E-programmet. Kursen har som övergripande mål att: knyta
ESSF05 Elektronikprojekt och hållbar utveckling Kursen elektronikprojekt och hållbar utveckling utgör avslutningen på den obligatoriska delen av E-programmet. Kursen har som övergripande mål att: knyta
Projekt. Roller i ett industriellt projekt. Projekt. Roller. Roller
 Johan Eliasson Projektarbete Projekt Definition: En grupp av projektdeltagare utför under ledning av en projektledare en klart definierad uppgift, på en viss tid, med begränsade resurser Resurserna kan
Johan Eliasson Projektarbete Projekt Definition: En grupp av projektdeltagare utför under ledning av en projektledare en klart definierad uppgift, på en viss tid, med begränsade resurser Resurserna kan
Goda råd till de som ska utföra ett liknande projekt (från KMM 2016)
") Goda råd till de som ska utföra ett liknande projekt (från KMM 2016) Snöa inte er på lösningar som kanske fungerar, eller som ni bara vill få fungera. Var realistiska och våga byt lösning om den det verkar
Goda råd till de som ska utföra ett liknande projekt (från KMM 2016) Snöa inte er på lösningar som kanske fungerar, eller som ni bara vill få fungera. Var realistiska och våga byt lösning om den det verkar
Kravspecifikation Fredrik Berntsson Version 1.1
 Kravspecifikation Fredrik Berntsson Version 1.1 Status Granskad FB 2016-02-01 Godkänd FB 2015-02-01 Dokumenthistorik Version Datum Utförda ändringar Utförda av Granskad 1.0 2015-02-01 Första versionen
Kravspecifikation Fredrik Berntsson Version 1.1 Status Granskad FB 2016-02-01 Godkänd FB 2015-02-01 Dokumenthistorik Version Datum Utförda ändringar Utförda av Granskad 1.0 2015-02-01 Första versionen
Poäng. Start v. Applikationsprogramm ering i Python 7.5. Antal registrerade (män/kvinnor) 50 (34/16)
 50 (34/16)") TEK/NAT Kursrapport Kurs Kurskod Poäng År Start v. Applikationsprogramm ering i Python 5DA 7.5 215 13 Institution Institutionen för datavetenskap Antal registrerade (män/kvinnor) 5 (34/16) Antal aktiva
TEK/NAT Kursrapport Kurs Kurskod Poäng År Start v. Applikationsprogramm ering i Python 5DA 7.5 215 13 Institution Institutionen för datavetenskap Antal registrerade (män/kvinnor) 5 (34/16) Antal aktiva
Människa- datorinteraktion, MDI, ht 2011, anvisningar för projekt- /grupparbete
 Människa- datorinteraktion, MDI, ht 2011 Anvisningar för projekt- /grupparbete Kursens projektuppgift består av att genomföra ett projektarbete i grupper om 3-4 personer. Uppgiften ska sedan presenteras
Människa- datorinteraktion, MDI, ht 2011 Anvisningar för projekt- /grupparbete Kursens projektuppgift består av att genomföra ett projektarbete i grupper om 3-4 personer. Uppgiften ska sedan presenteras
Projektplan. Joachim Lundh TSRT10 - SEGWAY 6 december 2010 Version 1.0. Status:
 Projektplan Joachim Lundh TSRT10 - SEGWAY 6 december 2010 Version 1.0 Status: Granskad Alla 6 december 2010 Godkänd Markus (DOK) 6 december 2010 PROJEKTIDENTITET Segway, HT 2010 Tekniska högskolan vid
Projektplan Joachim Lundh TSRT10 - SEGWAY 6 december 2010 Version 1.0 Status: Granskad Alla 6 december 2010 Godkänd Markus (DOK) 6 december 2010 PROJEKTIDENTITET Segway, HT 2010 Tekniska högskolan vid
Ingenjörsprojekt, TFYY51, 2017 Slutleverans, Projektkonferens, Dokumentation
 Ingenjörsprojekt, TFYY51, 2017 Slutleverans, Projektkonferens, Dokumentation Urban Forsberg Instutionen för Fysik, Kemi och Biologi, IFM Urban.forsberg@liu.se Slutleverans Slutleveransen beskrivs i kap
Ingenjörsprojekt, TFYY51, 2017 Slutleverans, Projektkonferens, Dokumentation Urban Forsberg Instutionen för Fysik, Kemi och Biologi, IFM Urban.forsberg@liu.se Slutleverans Slutleveransen beskrivs i kap
Projektplan. LIPs. LiTH Flygsimulator Petra Malmgren. Version 1.0. Status. TSRT71 Reglerteknisk projektkurs Kristin Fredman.
 Projektplan Petra Malmgren Version 1.0 Status Granskad Godkänd Kristin Fredman Projektidentitet Vårterminen 2005 Linköpings tekniska högskola, Institutionen för systemteknik, ISY Namn Ansvar Telefon E-post
Projektplan Petra Malmgren Version 1.0 Status Granskad Godkänd Kristin Fredman Projektidentitet Vårterminen 2005 Linköpings tekniska högskola, Institutionen för systemteknik, ISY Namn Ansvar Telefon E-post
RESULTAT, AVSLUT OCH UPPFÖLJNING INFÖRANDET BYTE AV PROJEKTGRUPP/MEDLEMMAR? PLANERING INFÖR INFÖRANDET
 Projektet närmar sig sitt slut men vad händer sedan? RESULTAT, AVSLUT OCH UPPFÖLJNING Stefan Berglund INFÖRANDET Avslutande del av genomförandefasen? Egen fas? Inledande del av projektavslutet? -Viktigt
Projektet närmar sig sitt slut men vad händer sedan? RESULTAT, AVSLUT OCH UPPFÖLJNING Stefan Berglund INFÖRANDET Avslutande del av genomförandefasen? Egen fas? Inledande del av projektavslutet? -Viktigt
Testplan Autonom truck
 Testplan Autonom truck Version 1.1 Redaktör: Joar Manhed Datum: 20 november 2018 Status Granskad Kim Byström 2018-11-20 Godkänd Andreas Bergström 2018-10-12 Projektidentitet Grupp E-post: Hemsida: Beställare:
Testplan Autonom truck Version 1.1 Redaktör: Joar Manhed Datum: 20 november 2018 Status Granskad Kim Byström 2018-11-20 Godkänd Andreas Bergström 2018-10-12 Projektidentitet Grupp E-post: Hemsida: Beställare:
Projektplan Autonom målföljning med quadcopter
 Version 1.1 Robo Ptarmigan 3 november 215 Status Granskad AF,CC 215-9-25 Godkänd Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare: Handledare: karlo343@student.liu.se
Version 1.1 Robo Ptarmigan 3 november 215 Status Granskad AF,CC 215-9-25 Godkänd Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare: Handledare: karlo343@student.liu.se
Linköpings universitet
 Linköpings universitet Ingenjörsprojekt, TFYY51 Slutleverans, Projektkonferens, Dokumentation Urban Forsberg Instutionen för Fysik, Kemi och Biologi, IFM Slutleveransen Slutleveransen beskrivs i kap 5.4
Linköpings universitet Ingenjörsprojekt, TFYY51 Slutleverans, Projektkonferens, Dokumentation Urban Forsberg Instutionen för Fysik, Kemi och Biologi, IFM Slutleveransen Slutleveransen beskrivs i kap 5.4
Projektplan. LIPs. Per Henriksson Version 1.0. LiTH 7 december Optimering av hjullastare. TSRT10 projektplan.pdf WHOPS 1
 Projektplan Per Henriksson Version 1.0 1 Status Granskad JT, PD, JR Godkänd - 2 Projektidentitet Optimering av Hjullastare HT2011 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-post Per Henriksson
Projektplan Per Henriksson Version 1.0 1 Status Granskad JT, PD, JR Godkänd - 2 Projektidentitet Optimering av Hjullastare HT2011 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-post Per Henriksson
Björn Åstrand
 HÖGSKOLAN I HALMSTAD Examensarbete Instruktioner Halvtidseminarium 2014 HT Björn Åstrand 2014-10-08 Björn Åstrand 2014 1 Halvtidsseminarium Vid halvtidsseminariet presenteras hittills uppnådda resultat
HÖGSKOLAN I HALMSTAD Examensarbete Instruktioner Halvtidseminarium 2014 HT Björn Åstrand 2014-10-08 Björn Åstrand 2014 1 Halvtidsseminarium Vid halvtidsseminariet presenteras hittills uppnådda resultat
Ramverk för projekt och uppdrag
 Peter Yngve IT-centrum 2011-02-10 1.0 1 (9) Ramverk för projekt och uppdrag Peter Yngve IT-centrum 2011-02-10 1.0 2 (9) BAKGRUND/MOTIV... 3 MÅL OCH SYFTE... 3 DEFINITIONER AV PROJEKT... 3 MODELL FÖR PROJEKTSTYRNING...
Peter Yngve IT-centrum 2011-02-10 1.0 1 (9) Ramverk för projekt och uppdrag Peter Yngve IT-centrum 2011-02-10 1.0 2 (9) BAKGRUND/MOTIV... 3 MÅL OCH SYFTE... 3 DEFINITIONER AV PROJEKT... 3 MODELL FÖR PROJEKTSTYRNING...
Innehåll (3) Innehåll (2) Innehåll (5) Innehåll (4) Innehåll (6) Innehåll (7) Dokumenthistorik. beställare, Översiktlig beskrivning av projektet
 Innehåll (2) Innehåll (5) Innehåll (4) Innehåll (6) Innehåll (7) Dokumenthistorik. beställare, Översiktlig beskrivning av projektet") Bilden hämtad från http://www.liu.se/cul-resurser/lips/kartor/fore.htm Projektplanering Om inte projektet planeras noga, kommer det garanterat att misslyckas Projektplanen Krav på en projektplan Beskriver
Bilden hämtad från http://www.liu.se/cul-resurser/lips/kartor/fore.htm Projektplanering Om inte projektet planeras noga, kommer det garanterat att misslyckas Projektplanen Krav på en projektplan Beskriver
LiTH Mobile Scout. Kravspecifikation. Redaktör: Patrik Molin Version 1.0. Status. Granskad Godkänd. TSRT71 Patrik Molin.
 2009-02-3 Kravspecifikation Redaktör: Version.0 Granskad Godkänd Status TSRT7 Sida 2009-02-3 PROJEKTIDENTITET 2009/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Martin
2009-02-3 Kravspecifikation Redaktör: Version.0 Granskad Godkänd Status TSRT7 Sida 2009-02-3 PROJEKTIDENTITET 2009/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Martin
Elektronik kandidatprojekt
 DNR LIU-2018-02499 1(13) Elektronik kandidatprojekt Programkurs 16 hp Electronics Engineering - Bachelor Project TSEA56 Gäller från: 2019 VT Fastställd av Programnämnden för elektroteknik, fysik och matematik,
DNR LIU-2018-02499 1(13) Elektronik kandidatprojekt Programkurs 16 hp Electronics Engineering - Bachelor Project TSEA56 Gäller från: 2019 VT Fastställd av Programnämnden för elektroteknik, fysik och matematik,
INFÖRANDE, AVSLUT OCH UPPFÖLJNING. Agneta Bränberg
 INFÖRANDE, AVSLUT OCH UPPFÖLJNING Agneta Bränberg Projektet närmar sig sitt slut men vad händer sedan? INFÖRANDE Avslutande del av genomförandefasen? Inledande del av projektavslutet? Egen fas? -Viktigt
INFÖRANDE, AVSLUT OCH UPPFÖLJNING Agneta Bränberg Projektet närmar sig sitt slut men vad händer sedan? INFÖRANDE Avslutande del av genomförandefasen? Inledande del av projektavslutet? Egen fas? -Viktigt
Elektronik kandidatprojekt
 1(13) Elektronik kandidatprojekt Programkurs 16 hp Electronics Engineering - Bachelor Project TSEA56 Gäller från: 2018 VT Fastställd av Programnämnden för elektroteknik, fysik och matematik, EF Fastställandedatum
1(13) Elektronik kandidatprojekt Programkurs 16 hp Electronics Engineering - Bachelor Project TSEA56 Gäller från: 2018 VT Fastställd av Programnämnden för elektroteknik, fysik och matematik, EF Fastställandedatum
I N N E H Å L L. Styrning och optimering av bilbana
 september 08 Erik Frisk september 08 Version.0 Granskad Godkänd Viktor Leek Status TFYY5 Ingenjörsprojekt Y I N N E H Å L L Inledning. Parter...............................................
september 08 Erik Frisk september 08 Version.0 Granskad Godkänd Viktor Leek Status TFYY5 Ingenjörsprojekt Y I N N E H Å L L Inledning. Parter...............................................
Projektplanering. Projektplanen. Om inte projektet planeras noga, kommer det garanterat att misslyckas
 Bilden hämtad från http://www.liu.se/cul-resurser/lips/kartor/fore.htm Projektplanering Om inte projektet planeras noga, kommer det garanterat att misslyckas Projektplanen Beskriver hur projektet ska utföras
Bilden hämtad från http://www.liu.se/cul-resurser/lips/kartor/fore.htm Projektplanering Om inte projektet planeras noga, kommer det garanterat att misslyckas Projektplanen Beskriver hur projektet ska utföras
LiTH. WalkCAM 2007/05/15. Testrapport. Mitun Dey Version 1.0. Status. Granskad. Godkänd. Reglerteknisk projektkurs WalkCAM LIPs
 Testrapport Mitun Dey Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Reglerteknisk projektkurs, WalkCAM, 2007/VT Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Henrik Johansson Projektledare
Testrapport Mitun Dey Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Reglerteknisk projektkurs, WalkCAM, 2007/VT Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Henrik Johansson Projektledare
Projektarbete DAVC20
 Projektarbete DAVC20 DAVC20, Per Strömgren 2002-10-28 Make a plan. Then follow the plan. Watts Humphrey 2 DAVC20, Per Strömgren, 1 Vad handlar detta om?! 3 DAVC20, Per Strömgren Examination För godkänt
Projektarbete DAVC20 DAVC20, Per Strömgren 2002-10-28 Make a plan. Then follow the plan. Watts Humphrey 2 DAVC20, Per Strömgren, 1 Vad handlar detta om?! 3 DAVC20, Per Strömgren Examination För godkänt
Agil Projektledning. En introduktion
 Agil Projektledning En introduktion Agil Projektledning Förändringar sker alltid i projekt Agil projektledning handlar om att hantera dessa Kunden har dålig insyn i ett traditionellt projekt De ska vara
Agil Projektledning En introduktion Agil Projektledning Förändringar sker alltid i projekt Agil projektledning handlar om att hantera dessa Kunden har dålig insyn i ett traditionellt projekt De ska vara
Konstruktion med mikrodatorer
 1 (6) Konstruktion med mikrodatorer Sändlista Kurskod Examinator Inger Klein Jonas Detterfelt Siv Söderlund Johan Högdahl Tomas Svensson Tomas Svensson TSEA29 Tomas Svensson Kursen gavs Årskurs 3 Kursens
1 (6) Konstruktion med mikrodatorer Sändlista Kurskod Examinator Inger Klein Jonas Detterfelt Siv Söderlund Johan Högdahl Tomas Svensson Tomas Svensson TSEA29 Tomas Svensson Kursen gavs Årskurs 3 Kursens
Riktlinjer Projektmodell fo r Kungä lvs kommun
 Riktlinjer Projektmodell fo r Kungä lvs kommun Riktlinjerna är antagna av förvaltningsledningen 2013-01-28 och gäller tillsvidare. (Dnr KS2012/1542) Ansvarig för dokumentet är chefen för enheten Utveckling,
Riktlinjer Projektmodell fo r Kungä lvs kommun Riktlinjerna är antagna av förvaltningsledningen 2013-01-28 och gäller tillsvidare. (Dnr KS2012/1542) Ansvarig för dokumentet är chefen för enheten Utveckling,
PROJEKTPLAN. Robotrace Robotrace Version 1.1. Status. Anton Karlsson Per Landström LIPS Projektplan i Oskar Svensson
 2015-12-21 PROJEKTPLAN Version 1.1 Status Granskad Svensson, Oskar 2015-12-21 Godkänd LIPS Projektplan i Oskar Svensson 2015-12-21 PROJEKTIDENTITET 2015/2016 Njudungsgymnsiet T4 Namn Ansvar Telefon E-post
2015-12-21 PROJEKTPLAN Version 1.1 Status Granskad Svensson, Oskar 2015-12-21 Godkänd LIPS Projektplan i Oskar Svensson 2015-12-21 PROJEKTIDENTITET 2015/2016 Njudungsgymnsiet T4 Namn Ansvar Telefon E-post
Introduktionsmöte Innehåll
 Introduktionsmöte Innehåll Introduktion till kursen Kursens mål och innehåll Undervisning Datavetenskap (LTH) Introduktionsmöte ST 2019 1 / 14 EDAA01 Programmeringsteknik - fördjupningskurs Ingen sommarkurs
Introduktionsmöte Innehåll Introduktion till kursen Kursens mål och innehåll Undervisning Datavetenskap (LTH) Introduktionsmöte ST 2019 1 / 14 EDAA01 Programmeringsteknik - fördjupningskurs Ingen sommarkurs
Testprotokoll Autonom målföljning med quadcopter
 Version 1.0 Robo Ptarmigan 3 december 2015 Status Granskad HC 2015-11-29 Godkänd Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare: Handledare: karlo343@student.liu.se
Version 1.0 Robo Ptarmigan 3 december 2015 Status Granskad HC 2015-11-29 Godkänd Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare: Handledare: karlo343@student.liu.se
Kandidatarbete på Industriell ekonomi
 Kandidatarbete på Industriell ekonomi inom Teknikens ekonomi och organisation Kurskod TEKX04, 15hp, Läsår 2017/18 Kurspresentation 2017-09-13 Erik Bohlin Bilder och dokument kommer att finnas på institutionens
Kandidatarbete på Industriell ekonomi inom Teknikens ekonomi och organisation Kurskod TEKX04, 15hp, Läsår 2017/18 Kurspresentation 2017-09-13 Erik Bohlin Bilder och dokument kommer att finnas på institutionens
TSRT10 - Projektplan
 TSRT10 - Projektplan Turbogruppen Version 0.2 22 september 2016 Status Granskad Dennis Åberg Skender 22 september 2016 Godkänd Namn Datum i Turbogruppen Projektidentitet Name Ansvar Telefon E-post (@student.liu.se)
TSRT10 - Projektplan Turbogruppen Version 0.2 22 september 2016 Status Granskad Dennis Åberg Skender 22 september 2016 Godkänd Namn Datum i Turbogruppen Projektidentitet Name Ansvar Telefon E-post (@student.liu.se)
Kandidatarbete på Industriell ekonomi
 Kandidatarbete på Industriell ekonomi inom Teknikens ekonomi och organisation Kurskod TEKX04, 15hp, Läsår 2016/17 Kurspresentation 2016-09-20 Uppdaterad 2016-12-09 Erik Bohlin Bilder och dokument finns
Kandidatarbete på Industriell ekonomi inom Teknikens ekonomi och organisation Kurskod TEKX04, 15hp, Läsår 2016/17 Kurspresentation 2016-09-20 Uppdaterad 2016-12-09 Erik Bohlin Bilder och dokument finns
Robotgräsklippare 2014-01-22 PROJEKTPLAN. Robotgräsklippare. Version 1.1. Status. Granskad. Godkänd. Robotgräsklippare.
 2014-01-22 PROJEKTPLAN Version 1.1 Granskad Status Godkänd LIPS Projektplan i 2014-01-22 PROJEKTIDENTITET 2014/2015 Njudungsgymnasiet T4 Namn Ansvar Telefon E-post Isak Linehag Dokumentansvarig 070-332
2014-01-22 PROJEKTPLAN Version 1.1 Granskad Status Godkänd LIPS Projektplan i 2014-01-22 PROJEKTIDENTITET 2014/2015 Njudungsgymnasiet T4 Namn Ansvar Telefon E-post Isak Linehag Dokumentansvarig 070-332
LiTH Modellering av Helikopterdynamik Projektplan. Gustaf Norman Version 1.1
 Gustaf Norman Version 1.1 Status Granskad Godkänd 1 PROJEKTIDENTITET VT 2008 Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Johannes Bergkvist Testansvarig (TST) 070-413 44 30 johbe325@student.liu.se
Gustaf Norman Version 1.1 Status Granskad Godkänd 1 PROJEKTIDENTITET VT 2008 Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Johannes Bergkvist Testansvarig (TST) 070-413 44 30 johbe325@student.liu.se
Projektkontoret. Januari 2007. Kamilla.Petersson@gu.se Ylva.Wridell@gu.se
 Projektkontoret Januari 2007 Kamilla.Petersson@gu.se Ylva.Wridell@gu.se Agenda 1. Projektkontoret bakgrund, syfte, vad gör vi och för vem 2. Vilka projekt ska samordnas inom projektkontoret? 3. Vad innebär
Projektkontoret Januari 2007 Kamilla.Petersson@gu.se Ylva.Wridell@gu.se Agenda 1. Projektkontoret bakgrund, syfte, vad gör vi och för vem 2. Vilka projekt ska samordnas inom projektkontoret? 3. Vad innebär
Fysik kandidatprojekt
 DNR LIU-2018-02499 1(12) Fysik kandidatprojekt Programkurs 16 hp Applied Physics - Bachelor Project TFYA75 Gäller från: 2019 VT Fastställd av Programnämnden för elektroteknik, fysik och matematik, EF Fastställandedatum
DNR LIU-2018-02499 1(12) Fysik kandidatprojekt Programkurs 16 hp Applied Physics - Bachelor Project TFYA75 Gäller från: 2019 VT Fastställd av Programnämnden för elektroteknik, fysik och matematik, EF Fastställandedatum
Exempel på verklig projektplan
 Exempel på verklig projektplan Detta är ett exempel på en proffessionell projektplan hämtad ur verkliga livet. Den visas inte i sin fullständighet, det mesta är bortklippt, men strukturen och mycket av
Exempel på verklig projektplan Detta är ett exempel på en proffessionell projektplan hämtad ur verkliga livet. Den visas inte i sin fullständighet, det mesta är bortklippt, men strukturen och mycket av
Kandidatarbete på Industriell ekonomi
 Kandidatarbete på Industriell ekonomi inom Teknikens ekonomi och organisation Kurskod TEKX04, 15hp, Läsår 2018/19 Kurspresentation 2018-09-18 Erik Bohlin Bilder och dokument kommer att finnas på institutionens
Kandidatarbete på Industriell ekonomi inom Teknikens ekonomi och organisation Kurskod TEKX04, 15hp, Läsår 2018/19 Kurspresentation 2018-09-18 Erik Bohlin Bilder och dokument kommer att finnas på institutionens