Kurvor och ytor. Gustav Taxén
|
|
|
- Lisbeth Lindström
- för 7 år sedan
- Visningar:
Transkript


1 Kurvor och ytor Gustav Taxén 2D1640 Grafik och Interaktionsprogrammering VT 2007
2 Kurvor och ytor Explicit form Implicit form Parametrisk form Procedurbaserade Polynom Catmull-Clark Kubiska (grad 3) Generella (grad d) Interpolerande Hermite Bezier B-Spline Generell B-Spline Uniform NURBS
3 Representation av kurvor Explicit Generellt y = f(x) Exempel y = x 1 y Implicit f(x, y) = 0 x - y = 0 Parametrisk x = f x (u) y = f y (u) u min u u max x = u y = u 0 u x
4 Parametriska kurvor Om vi deriverar uttrycket för kurvan p(u) = f x (u) f y (u) får vi en vektor som definierar kurvans tangent: dp(u) du = df x (u) du df y (u) du
5 Exempel p(u) = u u 2 0 u 1 dp(u) du = 1 2u I u = 0.5 får vi tangenten 1 1
6 Exempel
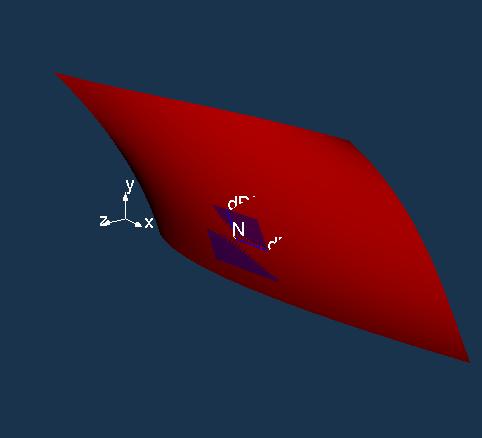
7 Parametriska ytor För ytor krävs två parametrar: u y p(u,v) = f x (u,v) f y (u,v) f z (u,v) z v x
8 Parametriska ytor De vektorer vi får om vi deriverar m.a.p. u och v definierar ytans tangentplan: p(u,v) u = f x (u,v) u f y (u,v) u f z (u,v) u p(u,v) v = f x (u,v) v f y (u,v) v f z (u,v) v N(u,v) = p(u,v) u p(u,v) v är ytans normal.
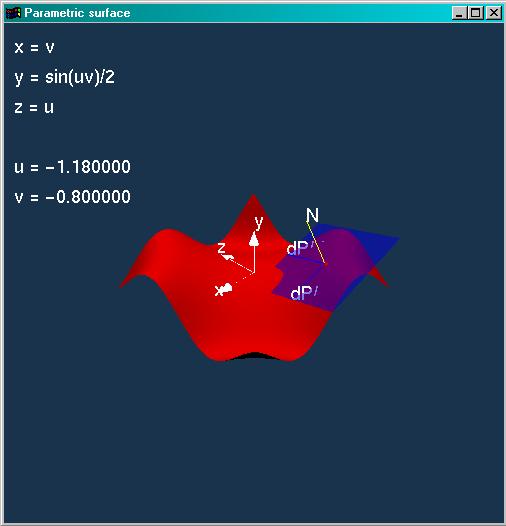
9 Exempel
10 Parametriska polynomkurvor Då p(u) är ett polynom i u kallas kurvan polynomkurva. p(u) = f x (u) f y (u) f z (u) = c x0 + uc x1 + u 2 c x u n c xn c y0 + uc y1 + u 2 c y u n c yn c z0 + uc z1 + u 2 c z u n c zn 0 u 1 Polynomkurvor, visar det sig, har egenskaper som är intressanta för datorgrafik och CAD/CAM.
11 Interpolerande polynomkurvor Antag att vi har fyra styrpunkter p 0, p 1, p 2 och p 3 och att vi vill att kurvan ska gå genom dessa punkter. p 0 p 2 p 3 p 1 p 0 = (p 0x p 0y p 0z ) T, p 1 = (p 1x p 1y p 1z ) T, p 2 = (p 2x p 2y p 2z ) T, p 3 = (p 3x p 3y p 3z ) T Vi samlar koordinaterna i tre vektorer: p x = p 0x p 1x p 2x p 3x p y = p 0y p 1y p 2y p 3y p z = p 0z p 1z p 2z p 3z
12 Interpolerande polynomkurvor Vi bestämmer att kurvan ska gå genom styrpunkterna vid u = 0, u = 1/3, u = 2/3 och u = 1. u = 0 p 2 p 0 p 3 p 1 u = 1 u = 1/3 u = 2/3 Vilka polynomkoefficienter ska vi ha?
13 Interpolerande polynomkurvor Låt oss börja med x-komponenten. Vi hade att f x (u) = c x0 + uc x1 + u 2 c x2 + u 3 c x3 och vi vill ha f x (0) = p 0x f x (1/3) = p 1x f x (2/3) = p 2x f x (1) = p 3x u = 0: u = 1: u = 1/3: u = 2/3: p 0x = c x0 p 3x = c x0 + c x1 + c x2 + c x3 p 1x = c x0 + (1/3)c x1 + (1/3) 2 c x2 + (1/3) 3 c x3 p 2x = c x0 + (2/3)c x1 + (2/3) 2 c x2 + (2/3) 3 c x3
14 Interpolerande polynomkurvor Löser man ekvationssystemet får man c 0x = p 0x c 1x = 5.5p 0x + 9p 1x 4.5p 2x + p 3x c 2x = 9p 0x 22.5p 1x + 18p 2x 4.5p 3x c 3x = 4.5p 0x p 1x 13.5p 2x + 4.5p 3x y- och z-komponenterna får samma värden. Kurvan som har dessa c-koefficienter sägs interpolera de fyra styrpunkterna.
15 Exempel y p 0 = (0 0) T p 1 = (1 0) T p 2 = (1 1) T p 3 = (0 1) T 1 0 p 3 p 2 p 0 p x
16 Exempel f x (u) = c x0 + uc x1 + u 2 c x2 + u 3 c x3 p 0 = (0 0) T p 1 = (1 0) T p 2 = (1 1) T p 3 = (0 1) T c 0x = p 0x c 1x = 5.5p 0x + 9p 1x 4.5p 2x + p 3x c 2x = 9p 0x 22.5p 1x + 18p 2x 4.5p 3x c 3x = 4.5p 0x p 1x 13.5p 2x + 4.5p 3x c 0x = 0 c 1x = = 4.5 c 2x = = 4.5 c 3x = = 0
17 Exempel f y (u) = c y0 + uc y1 + u 2 c y2 + u 3 c y3 p 0 = (0 0) T p 1 = (1 0) T p 2 = (1 1) T p 3 = (0 1) T c 0y = p 0y c 1y = 5.5p 0y + 9p 1y 4.5p 2y + p 3y c 2y = 9p 0y 22.5p 1y + 18p 2y 4.5p 3y c 3y = 4.5p 0y p 1y 13.5p 2y + 4.5p 3y c 0y = 0 c 1y = = 3.5 c 2y = = 13.5 c 3y = = 9
18 Exempel f x (u) = u 4.5u u 3 f y (u) = 0 3.5u u 2 9u 3
19 Exempel
20 Blandningspolynom Funktion b(u) som visar hur varje styrpunkt bidrar till kurvan när u sveps från 0 till 1. Exempel: En kurva som interpolerar två styrpunkter: f x (u) = (1 u)p 0x + up 1x f y (u) = (1 u)p 0y + up 1y P 0 b 0 (u) = 1 u b 1 (u) = u P 1
21 Blandningspolynom Blandningspolynom för en interpolerande kurva.
22 En parametrisk kubisk polynomkurva är en kurva på formen p(u) = b 0 (u)p 0 + b 1 (u)p 1 + b 2 (u)p 2 + b 3 (u)p 3 där p i är kurvans styrpunkter och b i (u) är kurvans blandningspolynom.
23 Utritning av parametriska kurvor draw2dcurve(float px[4], float py[4], float step) { float u; float oldx, oldy; for (u = 0.0f; u <= 1.0f; u += step) { float c0x = px[0]; float c0y = py[0]; float c1x = 5.5 * px[0] + 9 * px[1] 4.5 * px[2] + px[3];... float u2 = u * u; float u3 = u * u2; float x = c0x + c1x * u + c2x * u2 + c3x * u3; float y = c0y + c1y * u + c2y * u2 + c3y * u3; drawline(oldx, oldy, x, y); oldx = x; oldy = y; } } (Egentligen måste man initiera oldx och oldy också.)
24 Kubiska polynomytor p(u,v) = f x (u, v) f y (u, v) = f z (u, v) 3 i = 0 3 j = 0 c xij c yij c zij u i v j 0 u 1 0 v 1
25 Exempel
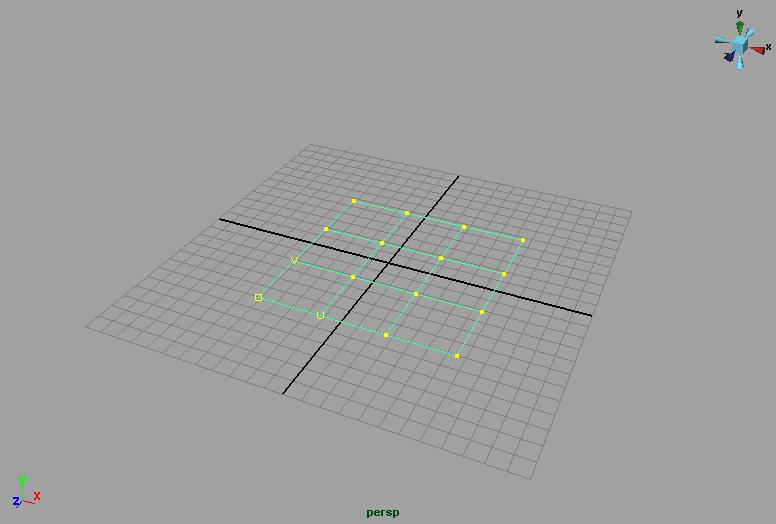
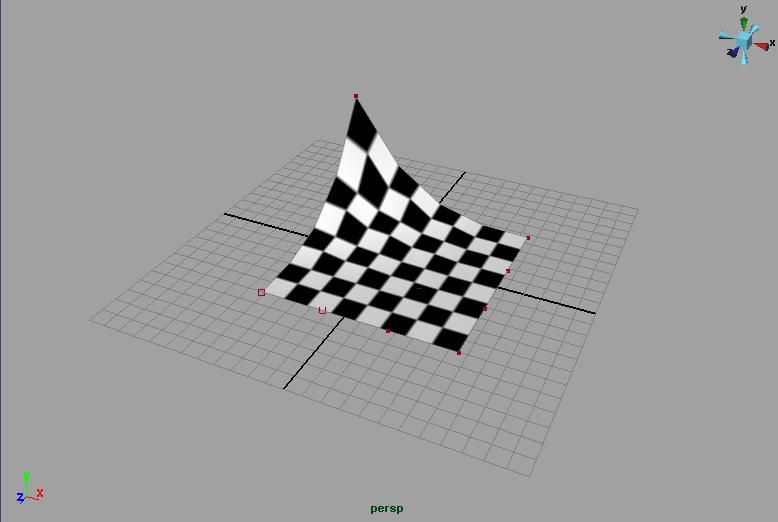
26 Interpolerande polynomytor Kräver 16 styrpunkter: u p 10 p 20 p 30 v p 00 p 33 p 01 p 02 p 03 p 13 p 23
27 Interpolerande polynomytor Om vi sätter v = 0 får vi en kurva som ska interpolera punkterna p 00, p 10, p 20 och p 30. u p 10 p 20 p 30 v = 0 v p 00 p 33 p 01 p 02 p 03 p 13 p 23
28 Interpolerande polynomytor Sätter vi v = 1 får vi en kurva som måste interpolera punkterna p 03, p 13, p 23 och p 33. u p 10 p 20 p 30 v = 1 v p 00 p 33 p 01 p 02 p 03 p 13 p 23
29 Interpolerande polynomytor Lägger man till v = 1/3 och v = 2/3 får man ett linjärt ekvationssytem. När man löser detta (se boken) får man Koefficienterna för polynomen.
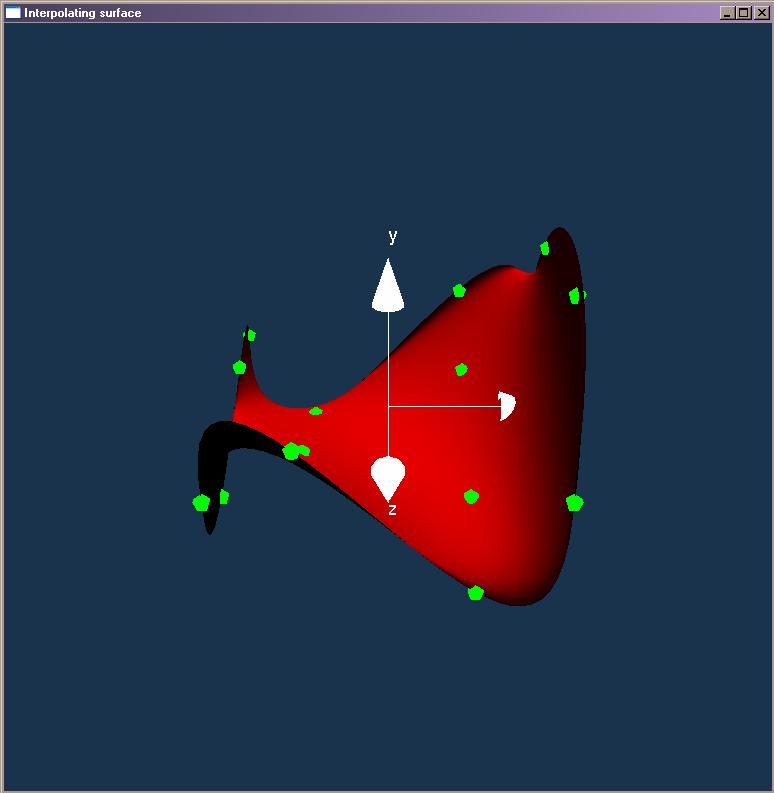
30 Interpolerande polynomytor
31 Sammanlänkning nkning av kurvor Icke-kontinuerlig C 0 -kontinuerlig C 1 -kontinuerlig
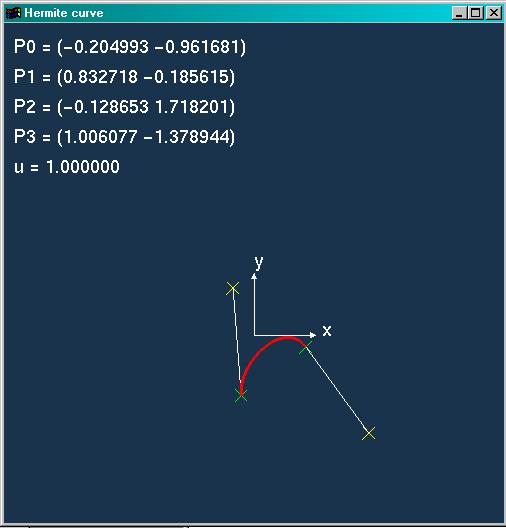
32 Hermitekurvor Fås om man kräver C 1 -kontinuitet. Kurvans ekvation är (i 2D) f x (u) = c x0 + uc x1 + u 2 c x2 + u 3 c x3 f y (u) = c y0 + uc y1 + u 2 c y2 + u 3 c y3 Vi behåller första och sista styrpunkten: p 0 = (p 0x p 3 = (p 3x p 0y ) T p 3y ) T
33 Hermitekurvor Sedan väljer vi tangenten i p 0 och p 3 explicit, d.v.s. df(u=0) du df x (u) du = p 0x df y (u) du u = 0 u = 0 p 0y df(u=1) du df x (u) du = p 3x df y (u) du u = 1 u = 1 p 3y
34 Hermitekurvor För x-komponenten är kurvans ekvation f x (u) = c x0 + uc x1 + u 2 c x2 + u 3 c x3 och dess derivata är f x (u) = c x1 + 2uc x2 + 3u 2 c x3 så p 0x = f x (0) = c x0 p 3x = f x (1) = c x0 + c x1 + c x2 + c x3 p 0x = f x (0) = c x1 p 3x = f x (1) = c x1 + 2c x2 + 3c x3
35 Hermitekurvor Löser vi ekvationssystemet får vi f x (u) = 1 u u 2 u p 0x p 1x p 0x p 1x y- och z-komponenterna blir samma.
36 Sammanlänkning nkning av kurvor Vi kan få C 1 -kontinuitet genom att sätta samman två Hermitekurvor där tangenten är densamma i P 3 för första kurvan och P 0 för andra kurvan: P 3 P 0 P 3 P 0
37 Exempel
38 Beziérkurvor Samma som Hermite men specificeras lite annorlunda. Derivatorna sätts till p 1 p 2 dp 0 du = 3(p 1 p 0 ) dp 3 du = 3(p 3 p 2 ) p 0 p 3 För att kurvan ska ritas med linjär hastighet m.a.p. u. (Inte uppenbart, men kan visas.)
39 Beziérkurvor f x (u) = c x0 + uc x1 + u 2 c x2 + u 3 c x3 f x (u) = c x1 + 2uc x2 + 3u 2 c x3 p 0x = c x0 p 1x = c x0 + c x1 + c x2 + c x3 3(p 1x p 0x ) = f x (0) = c x1 3(p 3x p 2x ) = f x (1) = c x1 + 2c x2 + 3c x3
40 Beziérkurvor Lösningen blir f x (u) = 1 u u 2 u p 0x p 1x p 2x p 3x
41 Beziérkurvor
.")
42 Beziérytor På motsvarande sätt som för interpolerande ytor (se boken).
43 Kubiska B-splinekurvorB Nackdelen med Hermitekurvor är att C 1 -kontinuitet inte alltid räcker. Det kan lösas genom att man släpper kravet att kurvan ska interpolera slutpunkterna på kurvan. p i-1 p i p i-3 p i-2
44 Kubiska B-splinekurvorB Nackdelen med Hermitekurvor är att C 1 -kontinuitet inte alltid räcker. Det kan lösas genom att man släpper kravet att kurvan ska interpolera slutpunkterna på kurvan. p i-1 p i p i+1 p i-2
45 Kubiska B-splinekurvorB Nackdelen med Hermitekurvor är att C 1 -kontinuitet inte alltid räcker. Det kan lösas genom att man släpper kravet att kurvan ska interpolera slutpunkterna på kurvan. p i-1 p i p i+1 p i+2 Se boken för härledning.
46 Exempel
47 Generaliserade B-splinekurvorB Vi kan generalisera B-splinekurvsbegreppet. Vi kan konstruera en funktion p(u) = f x (u) f y (u) f z (u) över intervallen u 0 u 1 u 2... u n-1 u n Värdena u 0, u 1,..., u n kallas knutar.
48 Generaliserade B-splinekurvorB Den generaliserade B-splinekurvans ekvation är n p(u) = i = 0 B id (u) p i där B id (u) är en basfunktion, i det här fallet ett polynom av grad d (och p i är styrpunkterna) Väljer man B i3 (u) som blandningspolynom för en kubisk B-spline (se boken) och knutarna {0, 0, 0, 0, 1, 1, 1, 1} får man en Beziérkurva.
49 NURBS NURBS = Non-Uniform Rational B-Spline Variant av generaliserad B-Spline där man viktar de olika styrpunkterna. p(u) = i = 0 B id (u)w i p i Anledningen är att man vill ge användaren explicit kontroll över hur mycket av varje styrpunkt som ska tas med. En annan fördel är att en affin transformation av en NURBS är ekvivalent med samma transformation av styrpunkterna.
50 NURBS v u
51 NURBS
52 NURBS v u
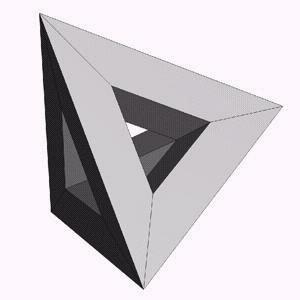
53 Catmull-Clark Clark-ytor Om man använder kombinationer av polynomytor kan det vara svårt att undvika sprickor på ställen där ytorna möts. Pixar
54 Catmull-Clark Clark-ytor
55 Catmull-Clark Clark-ytor F F F F Face points medelvärdet av hörnen som definierar polygonerna
56 Catmull-Clark Clark-ytor E Edge points medelvärdet av hörnen som definierar en kant och de två nya face points som hör till polygonerna som hör till kanten
57 Catmull-Clark Clark-ytor E E E E Edge points medelvärdet av hörnen som definierar en kant och de två nya face points som hör till polygonerna som hör till kanten
58 Catmull-Clark Clark-ytor V Vertex point den punkt som är gemensam för polygonerna. V = (Q + ((n-3)/n)s + 2R) / 3 Q = medelvärdet av alla nya face points S = den ursprungliga vertex point R = medelvärdet av mittpunkten för de kanter som hör till S
59 Catmull-Clark Clark-ytor E F E Bind samman face points med de edge points som hör till den polygonen
60 Catmull-Clark Clark-ytor Bind samman face points med de edge points som hör till den polygonen
61 Catmull-Clark Clark-ytor Bind samman vertex point med edge points
62 Catmull-Clark Clark-ytor En iteration klar!
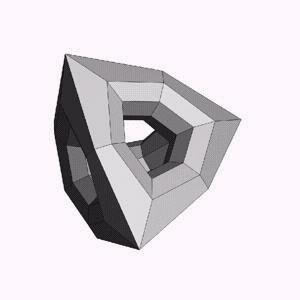
63 Catmull-Clark Clark-ytor


64 Catmull-Clark Clark-ytor Subdivision for Modeling and Animation SIGGRAPH 2000 Course Notes


65 Subdivision schemes Subdivision for Modeling and Animation SIGGRAPH 2000 Course Notes


66 Subdivision schemes Subdivision for Modeling and Animation SIGGRAPH 2000 Course Notes

67 Subdivision schemes Detta är en av anledningarna till varför man eftersträvar fyrsidiga polygoner i Maya. Subdivision for Modeling and Animation SIGGRAPH 2000 Course Notes

68 Adaptive subdivision schemes Subdivision for Modeling and Animation SIGGRAPH 2000 Course Notes

69 Catmull-Clark Clark-ytor: Exempel
70 Pixar
71
72 Jim Kalogiratos
Parametriska kurvor: Parametriska ytor
 Kror och ytor Eplicit form Implicit form Kror och ytor Parametrisk form Procerbaserade Polynom Catmll-Clark ekannan och dess datormotsarighet Martin Newell, 975. Gsta aén CID gstat@nada.kth.se Kbiska (grad
Kror och ytor Eplicit form Implicit form Kror och ytor Parametrisk form Procerbaserade Polynom Catmll-Clark ekannan och dess datormotsarighet Martin Newell, 975. Gsta aén CID gstat@nada.kth.se Kbiska (grad
3D: transformationer:
 3D: transformationer: ramar, matriser, kvaternioner perspektiv: ortografisk, perspektiv kurvor, ytor: parametriska, kubiska - interpolerande, Bézier, spline Inlämningsuppgift 3 Yngve Sundblad y@kth.se
3D: transformationer: ramar, matriser, kvaternioner perspektiv: ortografisk, perspektiv kurvor, ytor: parametriska, kubiska - interpolerande, Bézier, spline Inlämningsuppgift 3 Yngve Sundblad y@kth.se
TANA09 Föreläsning 8. Kubiska splines. B-Splines. Approximerande Splines. B-splines. Minsta kvadrat anpassning. Design av kurvor och ytor.
 TANA09 Föreläsning 8 Kubiska splines Approximerande Splines s s s s 4 B-splines. Minsta kvadrat anpassning. Design av kurvor och ytor. x x x x 4 x 5 Exempel Parametriska Kurvor. Ritprogram. Beziér kurvor.
TANA09 Föreläsning 8 Kubiska splines Approximerande Splines s s s s 4 B-splines. Minsta kvadrat anpassning. Design av kurvor och ytor. x x x x 4 x 5 Exempel Parametriska Kurvor. Ritprogram. Beziér kurvor.
Approximerande Splines. B-splines. Minsta kvadrat anpassning. Design av kurvor och ytor.
 TANA09 Föreläsning 8 Approximerande Splines B-splines. Minsta kvadrat anpassning. Design av kurvor och ytor. Exempel Parametriska Kurvor. Ritprogram. Beziér kurvor. Design av kurvor och ytor. Tillämpning
TANA09 Föreläsning 8 Approximerande Splines B-splines. Minsta kvadrat anpassning. Design av kurvor och ytor. Exempel Parametriska Kurvor. Ritprogram. Beziér kurvor. Design av kurvor och ytor. Tillämpning
Interpolation Modellfunktioner som satisfierar givna punkter
 Interpolation Modellfunktioner som satisfierar givna punkter Några tillämpningar Animering rörelser, t.ex. i tecknad film Bilder färger resizing Grafik Diskret representation -> kontinuerlig 2 Interpolation
Interpolation Modellfunktioner som satisfierar givna punkter Några tillämpningar Animering rörelser, t.ex. i tecknad film Bilder färger resizing Grafik Diskret representation -> kontinuerlig 2 Interpolation
1. Beräkna hastigheten, farten och accelerationen vid tiden t för en partikel vars rörelse beskrivs av r(t) = (2 sin t + cos t, 2 cos t sin t, 2t).
 = (2 sin t + cos t, 2 cos t sin t, 2t).") Repetition, analys.. Beräkna hastigheten, farten och accelerationen vid tiden t för en partikel vars rörelse beskrivs av r(t) = (2 sin t + cos t, 2 cos t sin t, 2t). 2. Beräkna längden av kurvan r(t) =
Repetition, analys.. Beräkna hastigheten, farten och accelerationen vid tiden t för en partikel vars rörelse beskrivs av r(t) = (2 sin t + cos t, 2 cos t sin t, 2t). 2. Beräkna längden av kurvan r(t) =
OH till Föreläsning 5, Numme K2, Läsa mellan raderna. Allmän polynom-interpolation, S Ch 3.1.0
 OH till Föreläsning 5, Numme K2, 181119 S Ch 3-34, GNM Kap 4-44A / GKN Kap 41A,(D),E Interpolation x y 1900 3822 1910 3982 1920 4281 1930 4302 1940 4042 1950 3922 1960 3921 1970 3940 1980 3960 1990 3980
OH till Föreläsning 5, Numme K2, 181119 S Ch 3-34, GNM Kap 4-44A / GKN Kap 41A,(D),E Interpolation x y 1900 3822 1910 3982 1920 4281 1930 4302 1940 4042 1950 3922 1960 3921 1970 3940 1980 3960 1990 3980
LAB 3. INTERPOLATION. 1 Inledning. 2 Interpolation med polynom. 3 Splineinterpolation. 1.1 Innehåll. 3.1 Problembeskrivning
 TANA18/20 mars 2015 LAB 3. INTERPOLATION 1 Inledning Vi ska studera problemet att interpolera givna data med ett polynom och att interpolera med kubiska splinefunktioner, s(x), som är styckvisa polynom.
TANA18/20 mars 2015 LAB 3. INTERPOLATION 1 Inledning Vi ska studera problemet att interpolera givna data med ett polynom och att interpolera med kubiska splinefunktioner, s(x), som är styckvisa polynom.
Rapportexempel, Datorer och datoranvändning
 LUNDS TEKNISKA HÖGSKOLA Datorer och datoranvändning Institutionen för datavetenskap 2014/1 Rapportexempel, Datorer och datoranvändning På de följande sidorna finns en (fingerad) laborationsrapport som
LUNDS TEKNISKA HÖGSKOLA Datorer och datoranvändning Institutionen för datavetenskap 2014/1 Rapportexempel, Datorer och datoranvändning På de följande sidorna finns en (fingerad) laborationsrapport som
Föreläsning 5. Approximationsteori
 Föreläsning 5 Approximationsteori Låt f vara en kontinuerlig funktion som vi vill approximera med en enklare funktion f(x) Vi kommer använda två olika approximationsmetoder: interpolation och minstrakvadratanpassning
Föreläsning 5 Approximationsteori Låt f vara en kontinuerlig funktion som vi vill approximera med en enklare funktion f(x) Vi kommer använda två olika approximationsmetoder: interpolation och minstrakvadratanpassning
6 Derivata och grafer
 6 Derivata och grafer 6.1 Dagens Teori När vi plottar funktionen f(x) = x + 1x 99x 8 med hjälp av dosan kan man få olika resultat beroende på vilka intervall man valt. 00000 100000-00 -100 100 00-100000
6 Derivata och grafer 6.1 Dagens Teori När vi plottar funktionen f(x) = x + 1x 99x 8 med hjälp av dosan kan man få olika resultat beroende på vilka intervall man valt. 00000 100000-00 -100 100 00-100000
Polynomanpassning i MATLAB
 Polynomanpassning i MATLAB Funktionsanropet c=polyfit(x,y,n) ger koefficiemterna i ett n:e-gradspolynom som anpassar sig till y-värdena för x-värdena med lämplig metod. I tredje föreläsningens exempel
Polynomanpassning i MATLAB Funktionsanropet c=polyfit(x,y,n) ger koefficiemterna i ett n:e-gradspolynom som anpassar sig till y-värdena för x-värdena med lämplig metod. I tredje föreläsningens exempel
TANA17 Matematiska beräkningar med Matlab
 TANA17 Matematiska beräkningar med Matlab Projekt 3. Beskrivning av geometri med Beziérkurvor 1 Introduktion Inom design har man behov av effektiva sätt att beskriva kurvor och ytor med matematiska funktioner
TANA17 Matematiska beräkningar med Matlab Projekt 3. Beskrivning av geometri med Beziérkurvor 1 Introduktion Inom design har man behov av effektiva sätt att beskriva kurvor och ytor med matematiska funktioner
SF1624 Algebra och geometri Lösningsförslag till tentamen DEL A. t 2
 SF64 Algebra och geometri Lösningsförslag till tentamen 4--4 DEL A. I rummet R har vi punkterna P = (,, 4) och Q = (,, ), samt linjen L som ges av vektorerna på formen t t, t där t är en reell parameter.
SF64 Algebra och geometri Lösningsförslag till tentamen 4--4 DEL A. I rummet R har vi punkterna P = (,, 4) och Q = (,, ), samt linjen L som ges av vektorerna på formen t t, t där t är en reell parameter.
Teorifrågor. 6. Beräkna konditionstalet för en diagonalmatris med diagonalelementen 2/k, k = 1,2,...,20.
 Teorifrågor Störningsanalys 1. Värdet på x är uppmätt till 0.956 med ett absolutfel på högst 0.0005. Ge en övre gräns för absolutfelet i y = exp(x) + x 2. Motivera svaret. 2. Ekvationen log(x) x/50 = 0
Teorifrågor Störningsanalys 1. Värdet på x är uppmätt till 0.956 med ett absolutfel på högst 0.0005. Ge en övre gräns för absolutfelet i y = exp(x) + x 2. Motivera svaret. 2. Ekvationen log(x) x/50 = 0
Del I: Lösningsförslag till Numerisk analys,
 Lösningsförslag till Numerisk analys, 2016-08-22. Del I: (1) Nedan följer ett antal påståenden. Använd nyckelbegreppen därunder och ange det begrepp som är mest lämpligt. Skriv rätt bokstav (a)-(l) i luckan
Lösningsförslag till Numerisk analys, 2016-08-22. Del I: (1) Nedan följer ett antal påståenden. Använd nyckelbegreppen därunder och ange det begrepp som är mest lämpligt. Skriv rätt bokstav (a)-(l) i luckan
Kurvanpassning. Kurvanpassning jfr lab. Kurvanpassning jfr lab
 Kurvanpassning jfr lab Kurvanpassning Beräkningsvetenskap II Punktmängd approximerande funktion Finns olika sätt att approximera med polynom Problem med höga gradtal kan ge stora kast Kurvanpassning jfr
Kurvanpassning jfr lab Kurvanpassning Beräkningsvetenskap II Punktmängd approximerande funktion Finns olika sätt att approximera med polynom Problem med höga gradtal kan ge stora kast Kurvanpassning jfr
OH till Föreläsning 5, Numme K2, GNM Kap 4-4.4A / GKN Kap 4.1A,(D),E Interpolation. Läsa mellan raderna. Allmän polynom-interpolation
,E Interpolation. Läsa mellan raderna. Allmän polynom-interpolation") OH till Föreläsning 5, Numme K, 14101 GNM Kap 4-44A / GKN Kap 41A,(D),E Interpolation x y 1900 8 1910 98 190 481 190 40 1940 404 1950 9 1960 91 1970 940 1980 960 1990 980 Läsa mellan raderna 1900 190 1940
OH till Föreläsning 5, Numme K, 14101 GNM Kap 4-44A / GKN Kap 41A,(D),E Interpolation x y 1900 8 1910 98 190 481 190 40 1940 404 1950 9 1960 91 1970 940 1980 960 1990 980 Läsa mellan raderna 1900 190 1940
Numerisk Analys, MMG410. Lecture 12. 1/24
 Numerisk Analys, MMG410. Lecture 12. 1/24 Interpolation För i tiden gällde räknesticka och tabeller. Beräkna 1.244 givet en tabel över y = t, y-värdena är givna med fem siffror, och t = 0,0.01,0.02,...,9.99,10.00.
Numerisk Analys, MMG410. Lecture 12. 1/24 Interpolation För i tiden gällde räknesticka och tabeller. Beräkna 1.244 givet en tabel över y = t, y-värdena är givna med fem siffror, och t = 0,0.01,0.02,...,9.99,10.00.
Dagens tema är exponentialfunktioner. Egentligen inga nyheter, snarare repetition. Vi vet att alla exponentialfunktioner.
 Dagens tema är exponentialfunktioner. Egentligen inga nyheter, snarare repetition. Vi vet att alla exponentialfunktioner f(x) = C a x kan, om man så vill, skrivas om, med basen e, till Vi vet också att
Dagens tema är exponentialfunktioner. Egentligen inga nyheter, snarare repetition. Vi vet att alla exponentialfunktioner f(x) = C a x kan, om man så vill, skrivas om, med basen e, till Vi vet också att
Omtentamen. TNM077 3D-datorgrafik och animering kl 8-12 Inga hjälpmedel. (samt även TNM008 3D-datorgrafik och VR)
") Omtentamen TNM077 3D-datorgrafik och animering (samt även TNM008 3D-datorgrafik och VR) 2005-06-10 kl 8-12 Inga hjälpmedel Denna tentamen innehåller 7 uppgifter som tillsammans kan ge maximalt 40 poäng.
Omtentamen TNM077 3D-datorgrafik och animering (samt även TNM008 3D-datorgrafik och VR) 2005-06-10 kl 8-12 Inga hjälpmedel Denna tentamen innehåller 7 uppgifter som tillsammans kan ge maximalt 40 poäng.
Linjärisering, Jacobimatris och Newtons metod.
 Linjärisering, Jacobimatris och Newtons metod Analys och Linjär Algebra, del C, K/Kf/Bt, vt0 Inledning Vi skall lösa system av icke-linjära ekvationer Som exempel kan vi ta, x = 0, x = 0, som är ett system
Linjärisering, Jacobimatris och Newtons metod Analys och Linjär Algebra, del C, K/Kf/Bt, vt0 Inledning Vi skall lösa system av icke-linjära ekvationer Som exempel kan vi ta, x = 0, x = 0, som är ett system
Interpolation. 8 december 2014 Sida 1 / 20
 TANA09 Föreläsning 7 Interpolation Interpolationsproblemet. Introduktion. Polynominterpolation. Felanalys. Runges fenomen. Tillämpning. LED display. Splinefunktioner. Spline Interpolation. Ändpunktsvillkor.
TANA09 Föreläsning 7 Interpolation Interpolationsproblemet. Introduktion. Polynominterpolation. Felanalys. Runges fenomen. Tillämpning. LED display. Splinefunktioner. Spline Interpolation. Ändpunktsvillkor.
Modellering. Gustav Taxén
 Modellering Gustav Taxén gustavt@csc.kth.se 2D1640 Grafik och Interaktionsprogrammering VT 2007 Kurvor / ytor Ett vanligt sätt att modellera är att använda kurvor/ytor. Ett sorts explicit sätt att skapa
Modellering Gustav Taxén gustavt@csc.kth.se 2D1640 Grafik och Interaktionsprogrammering VT 2007 Kurvor / ytor Ett vanligt sätt att modellera är att använda kurvor/ytor. Ett sorts explicit sätt att skapa
x +y +z = 2 2x +y = 3 y +2z = 1 x = 1 + t y = 1 2t z = t 3x 2 + 3y 2 y = 0 y = x2 y 2.
 Lösningar till tentamen i Inledande matematik för M/TD, TMV155/175 Tid: 2006-10-27, kl 08.30-12.30 Hjälpmedel: Inga Betygsgränser, ev bonuspoäng inräknad: 20-29 p. ger betyget 3, 30-39 p. ger betyget 4
Lösningar till tentamen i Inledande matematik för M/TD, TMV155/175 Tid: 2006-10-27, kl 08.30-12.30 Hjälpmedel: Inga Betygsgränser, ev bonuspoäng inräknad: 20-29 p. ger betyget 3, 30-39 p. ger betyget 4
5 Om f (r) = 0 kan andraderivatan inte avgöra vilken typ av extrempunkt det handlar om. Återstår att avgöra punktens typ med teckenstudium.
 = 0 kan andraderivatan inte avgöra vilken typ av extrempunkt det handlar om. Återstår att avgöra punktens typ med teckenstudium.") Så här hittar man extrempunkter, max-, min eller terrasspunkter, till en kurva y = f(x) med hjälp av i första hand f (x) 1 Bestäm f (x) och f (x) 2 Lös ekvationen f (x) = 0. Om ekvationen saknar rötter
Så här hittar man extrempunkter, max-, min eller terrasspunkter, till en kurva y = f(x) med hjälp av i första hand f (x) 1 Bestäm f (x) och f (x) 2 Lös ekvationen f (x) = 0. Om ekvationen saknar rötter
5B1146 med Matlab. Laborationsr. Laborationsgrupp: Sebastian Johnson Erik Lundberg, Ann-Sofi Åhn ( endst tal1-3
 1 Revision 4 2006-12-16 2. SIDFÖRTECKNING 5B1146 med Matlab Laborationsr Laborationsgrupp: Sebastian Johnson, Ann-Sofi Åhn ( endst tal1-3 Titel Sida 1. Uppgift 1.8.1....3 2. Uppgift 1.8.2....6 3. Uppgift
1 Revision 4 2006-12-16 2. SIDFÖRTECKNING 5B1146 med Matlab Laborationsr Laborationsgrupp: Sebastian Johnson, Ann-Sofi Åhn ( endst tal1-3 Titel Sida 1. Uppgift 1.8.1....3 2. Uppgift 1.8.2....6 3. Uppgift
Repetition, Matematik 2 för lärare. Ï x + 2y - 3z = 1 Ô Ì 3x - y + 2z = a Ô Á. . Beräkna ABT. Beräkna (AB) T
 T") Repetition, Matematik 2 för lärare Ï -2x + y + 2z = 3 1. Ange för alla reella a lösningsmängden till ekvationssystemet Ì ax + 2y + z = 1. Ó x + 3y - z = 4 2. Vad är villkoret på talet a för att ekvationssystemet
Repetition, Matematik 2 för lärare Ï -2x + y + 2z = 3 1. Ange för alla reella a lösningsmängden till ekvationssystemet Ì ax + 2y + z = 1. Ó x + 3y - z = 4 2. Vad är villkoret på talet a för att ekvationssystemet
Sammanfattning (Nummedelen)
") DN11 Numeriska metoder och grundläggande programmering Sammanfattning (Nummedelen Icke-linjära ekvationer Ex: y=x 0.5 Lösningsmetoder: Skriv på polynomform och använd roots(coeffs Fixpunkt x i+1 =G(x i,
DN11 Numeriska metoder och grundläggande programmering Sammanfattning (Nummedelen Icke-linjära ekvationer Ex: y=x 0.5 Lösningsmetoder: Skriv på polynomform och använd roots(coeffs Fixpunkt x i+1 =G(x i,
3.6 De klassiska polynomens ortogonalitetsegenskaper.
 Vetenskapliga beräkningar III 34 3.6 De klassiska polynomens ortogonalitetsegenskaper. I nedanstående tabell anges egenskaperna för några av de vanligaste ortogonala polynomen. Polynomen är normerade så,
Vetenskapliga beräkningar III 34 3.6 De klassiska polynomens ortogonalitetsegenskaper. I nedanstående tabell anges egenskaperna för några av de vanligaste ortogonala polynomen. Polynomen är normerade så,
Sidor i boken f(x) = a x 2 +b x+c
 = a x 2 +b x+c") Sidor i boken 18-151 Andragradsfunktioner Här ska vi studera andragradsfunktionen som skrivs f(x) = ax +bx+c där a, b, c är konstanter (reella tal) och där a 0. Grafen (kurvan) till f(x), y = ax + bx +
Sidor i boken 18-151 Andragradsfunktioner Här ska vi studera andragradsfunktionen som skrivs f(x) = ax +bx+c där a, b, c är konstanter (reella tal) och där a 0. Grafen (kurvan) till f(x), y = ax + bx +
Tentamen TNM061, 3D-grafik och animering för MT2. Tisdag 3/ kl 8-12 TP51, TP52, TP54, TP56, TP41, TP43. Inga hjälpmedel
 Tentamen TNM061, 3D-grafik och animering för MT2 Tisdag 3/6 2014 kl 8-12 TP51, TP52, TP54, TP56, TP41, TP43 Inga hjälpmedel Tentamen innehåller 8 uppgifter, vilka tillsammans kan ge maximalt 50 poäng.
Tentamen TNM061, 3D-grafik och animering för MT2 Tisdag 3/6 2014 kl 8-12 TP51, TP52, TP54, TP56, TP41, TP43 Inga hjälpmedel Tentamen innehåller 8 uppgifter, vilka tillsammans kan ge maximalt 50 poäng.
f(x) = x 2 g(x) = x3 100 h(x) = x 4 x x 2 x 3 100
 = x 2 g(x) = x3 100 h(x) = x 4 x x 2 x 3 100") 8 Skissa grafer 8.1 Dagens Teori När vi nu ska lära oss att skissa kurvor är det bra att ha en känsla för vad som händer med kurvan när vi sätter in stora tal. Inledningsvis är det ju polynom vi ska studera.
8 Skissa grafer 8.1 Dagens Teori När vi nu ska lära oss att skissa kurvor är det bra att ha en känsla för vad som händer med kurvan när vi sätter in stora tal. Inledningsvis är det ju polynom vi ska studera.
2 Funktioner från R n till R m, linjära, inversa och implicita funktioner
 Nr, feb -5, Amelia Funktioner från R n till R m, linjära, inversa och implicita funktioner.1 Funktioner från R n till R m Vi har i tidigare föreläsningar sett olika tolkningar av funktioner från R n till
Nr, feb -5, Amelia Funktioner från R n till R m, linjära, inversa och implicita funktioner.1 Funktioner från R n till R m Vi har i tidigare föreläsningar sett olika tolkningar av funktioner från R n till
Uppgifter, 2014 Tillämpad linjär algebra
 Geometri. Uppgifter, 24 Tillämpad linjär algebra. Uppgift. Låt A = (,, ), B = (, 2, 3), C = (,, ) vara punkter i R 3. () Beskriva på parameter form alla plan som innehåler A, B och C. Ger ett system av
Geometri. Uppgifter, 24 Tillämpad linjär algebra. Uppgift. Låt A = (,, ), B = (, 2, 3), C = (,, ) vara punkter i R 3. () Beskriva på parameter form alla plan som innehåler A, B och C. Ger ett system av
MA2001 Envariabelanalys
 MA2001 Envariabelanalys Något om derivator del 1 Mikael Hindgren 11 november 2018 Derivatans definition Exempel 1 s-t-graf för ett föremål i rörelse. s(0) = 0. s s = v t Hastigeten konstant: Rät linje
MA2001 Envariabelanalys Något om derivator del 1 Mikael Hindgren 11 november 2018 Derivatans definition Exempel 1 s-t-graf för ett föremål i rörelse. s(0) = 0. s s = v t Hastigeten konstant: Rät linje
Numerisk Analys, MMG410. Lecture 13. 1/58
 Numerisk Analys, MMG410. Lecture 13. 1/58 Interpolation För i tiden gällde räknesticka och tabeller. Beräkna 1.244 givet en tabel över y = t, y-värdena är givna med fem siffror, och t = 0,0.01,0.02,...,9.99,10.00.
Numerisk Analys, MMG410. Lecture 13. 1/58 Interpolation För i tiden gällde räknesticka och tabeller. Beräkna 1.244 givet en tabel över y = t, y-värdena är givna med fem siffror, och t = 0,0.01,0.02,...,9.99,10.00.
Gamla tentemensuppgifter
 Inte heller idag någon ny teori! Gamla tentemensuppgifter 1 Bestäm det andragradspolynom vars kurva skär x-axeln i x = 3 och x = 1 och y-axeln i y = 3 f(x) = (x 3)(x + 1) = x x 3 är en bra start, men vi
Inte heller idag någon ny teori! Gamla tentemensuppgifter 1 Bestäm det andragradspolynom vars kurva skär x-axeln i x = 3 och x = 1 och y-axeln i y = 3 f(x) = (x 3)(x + 1) = x x 3 är en bra start, men vi
2D-grafik. Gustav Taxén
 2D-grafik Gustav Taxén gustavt@csc.kth.se 2D164 Grafik och Interaktionsprogrammering VT 27 Framebuffer Datorminne som lagrar information för pixlarna som ska visas på skärmen Grafikkortet hämtar värdena
2D-grafik Gustav Taxén gustavt@csc.kth.se 2D164 Grafik och Interaktionsprogrammering VT 27 Framebuffer Datorminne som lagrar information för pixlarna som ska visas på skärmen Grafikkortet hämtar värdena
NUMPROG, 2D1212, vt Föreläsning 1, Numme-delen. Linjära ekvationssystem Interpolation, Minstakvadratmetoden
 NUMPROG, D, vt 006 Föreläsning, Numme-delen Linjära ekvationssystem Interpolation, Minstakvadratmetoden En av de vanligaste numeriska beräkningar som görs i ingenjörsmässiga tillämpningar är att lösa ett
NUMPROG, D, vt 006 Föreläsning, Numme-delen Linjära ekvationssystem Interpolation, Minstakvadratmetoden En av de vanligaste numeriska beräkningar som görs i ingenjörsmässiga tillämpningar är att lösa ett
där x < ξ < 0. Eftersom ξ < 0 är högerledet alltid mindre än Lektion 4, Envariabelanalys den 30 september 1999 r(1 + 0) r 1 = r.
 r 1 = r.") Lektion 4, Envariabelanals den 30 september 1999 där 0 < ξ 0 är högerledet alltid större än 2.6.2 Åskådliggör medelvärdessatsen genom att finna en punkt i det öppna intervallet (1, 2) där
Lektion 4, Envariabelanals den 30 september 1999 där 0 < ξ 0 är högerledet alltid större än 2.6.2 Åskådliggör medelvärdessatsen genom att finna en punkt i det öppna intervallet (1, 2) där
SF1626 Flervariabelanalys
 1 / 14 SF1626 Flervariabelanalys Föreläsning 7 Henrik Shahgholian Vid Institutionen för matematik, KTH VT 2018, Period 3 2 / 14 SF1626 Flervariabelanalys Dagens Lektion Kap 12.8 1. Implicit definierade
1 / 14 SF1626 Flervariabelanalys Föreläsning 7 Henrik Shahgholian Vid Institutionen för matematik, KTH VT 2018, Period 3 2 / 14 SF1626 Flervariabelanalys Dagens Lektion Kap 12.8 1. Implicit definierade
Datorövning 2 med Maple
 Datorövning 2 med Maple Flerdimensionell analys, ht 2008, Lp1 15 september 2008 Under denna datorövning skall vi lösa uppgifter i övningshäftet med hjälp av Maple. Vi skall beräkna partiella derivator,
Datorövning 2 med Maple Flerdimensionell analys, ht 2008, Lp1 15 september 2008 Under denna datorövning skall vi lösa uppgifter i övningshäftet med hjälp av Maple. Vi skall beräkna partiella derivator,
TANA19 NUMERISKA METODER
 HT2/2016 LINJE+ÅK+KLASS : TANA19 NUMERISKA METODER Laboration 3. Interpolation Namn : Personnummer : E-post : @student.liu.se Namn : Personnummer : E-post : @student.liu.se Godkänd datum : Sign : Retur
HT2/2016 LINJE+ÅK+KLASS : TANA19 NUMERISKA METODER Laboration 3. Interpolation Namn : Personnummer : E-post : @student.liu.se Namn : Personnummer : E-post : @student.liu.se Godkänd datum : Sign : Retur
x ( f u 2y + f v 2x) xy = 24 och C = f
 xy = 24 och C = f") Institutionen för Matematik, KTH Torbjörn Kolsrud SF160, Differential- och integralkalkyl II, del 2, flervariabel, för F1. Tentamen onsdag 0 maj 2012, 8.00-1.00 Förslag till lösningar 1. Bestäm tangentplanet
Institutionen för Matematik, KTH Torbjörn Kolsrud SF160, Differential- och integralkalkyl II, del 2, flervariabel, för F1. Tentamen onsdag 0 maj 2012, 8.00-1.00 Förslag till lösningar 1. Bestäm tangentplanet
23 Konservativa fält i R 3 och rotation
 Nr 23, 7 maj -5, Amelia 2 23 Konservativa fält i R 3 och rotation 23. Potential 23.. Två dimensioner (2D) I två dimensioner definierade vi ett vektorfält som konservativt om kurvintegralen av fältet endast
Nr 23, 7 maj -5, Amelia 2 23 Konservativa fält i R 3 och rotation 23. Potential 23.. Två dimensioner (2D) I två dimensioner definierade vi ett vektorfält som konservativt om kurvintegralen av fältet endast
1. Vi skriver upp ekvationssystemet i matrisform och gausseliminerar tills vi når trappstegsform,
 Lösningsförslag, Matematik 2, E, I, M, Media och T, 2 2 8.. Vi skriver upp ekvationssystemet i matrisform och gausseliminerar tills vi når trappstegsform, 2 2 2 a 2 2 2 a 2 2-2 2 a 7 7 2 a 7 7-7 2 a +
Lösningsförslag, Matematik 2, E, I, M, Media och T, 2 2 8.. Vi skriver upp ekvationssystemet i matrisform och gausseliminerar tills vi når trappstegsform, 2 2 2 a 2 2 2 a 2 2-2 2 a 7 7 2 a 7 7-7 2 a +
f(x) = x 2 g(x) = x3 100
 = x 2 g(x) = x3 100") När vi nu ska lära oss att skissa kurvor är det bra att ha en känsla för vad som händer med kurvan när vi sätter in stora tal. Inledningsvis är det ju polynom vi ska studera. Här ska vi se vad som händer
När vi nu ska lära oss att skissa kurvor är det bra att ha en känsla för vad som händer med kurvan när vi sätter in stora tal. Inledningsvis är det ju polynom vi ska studera. Här ska vi se vad som händer
Lösningar och kommentarer till uppgifter i 3.1
 Lösningar och kommentarer till uppgifter i.1 102 b) TB: Kör de med dessa uppgifter i det här kapitlet också? Det gör inget, jag börjar bli ganska bra på det. Vi har funktionen fx) = x x 2 24x + 1 och man
Lösningar och kommentarer till uppgifter i.1 102 b) TB: Kör de med dessa uppgifter i det här kapitlet också? Det gör inget, jag börjar bli ganska bra på det. Vi har funktionen fx) = x x 2 24x + 1 och man
Index. Vektorer och Elementvisa operationer. Summor och Medelvärden. Grafik i två eller tre dimensioner. Ytor. 20 januari 2016 Sida 1 / 26
 TAIU07 Föreläsning 2 Index. Vektorer och Elementvisa operationer. Summor och Medelvärden. Grafik i två eller tre dimensioner. Ytor. 20 januari 2016 Sida 1 / 26 Matriselement och Index För att manipulera
TAIU07 Föreläsning 2 Index. Vektorer och Elementvisa operationer. Summor och Medelvärden. Grafik i två eller tre dimensioner. Ytor. 20 januari 2016 Sida 1 / 26 Matriselement och Index För att manipulera
Lösningar till tentamen i Matematik II, 5B1116, 5B1136 för Bio. E,I,K,ME, Media och OPEN, tisdagen den 13 april 2004.
 Institutionen för matematik. KTH Lösningar till tentamen i Matematik II, B1116, B1136 för Bio. E,I,K,ME, Media och OPEN, tisdagen den 13 april 2004. 1. Välj en punkt i planet 3x + 3y z = 4, exempelvis
Institutionen för matematik. KTH Lösningar till tentamen i Matematik II, B1116, B1136 för Bio. E,I,K,ME, Media och OPEN, tisdagen den 13 april 2004. 1. Välj en punkt i planet 3x + 3y z = 4, exempelvis
Dagens teman. Linjära ODE-system av ordning 1:
 Dagens teman Linjära ODE-system av ordning 1: Egenvärdesmetoden. Lösning av homogena system x 1 (t) = a 11 x 1 (t) + + a 1n x n (t) x 2 (t) = a 21 x 1 (t) + + a 2n x n (t) x n (t) = a n1 x 1 (t) + + a
Dagens teman Linjära ODE-system av ordning 1: Egenvärdesmetoden. Lösning av homogena system x 1 (t) = a 11 x 1 (t) + + a 1n x n (t) x 2 (t) = a 21 x 1 (t) + + a 2n x n (t) x n (t) = a n1 x 1 (t) + + a
Datorövning 2 med Maple, vt
 Flerdimensionell analys, vt 1 2009 Datorövning 2 med Maple, vt 1 2009 Under denna datorövning skall vi lösa uppgifter i övningshäftet med hjälp av Maple. Vi skall beräkna partiella derivator, transformera
Flerdimensionell analys, vt 1 2009 Datorövning 2 med Maple, vt 1 2009 Under denna datorövning skall vi lösa uppgifter i övningshäftet med hjälp av Maple. Vi skall beräkna partiella derivator, transformera
Uppsala Universitet Matematiska Institutionen Bo Styf. Lösningar till kryssproblemen 1-5. Uppgifter till lektion 1: = 10 x. = x 10.
 Uppsala Universitet Matematiska Institutionen Bo Styf Envariabelanalys, 10 hp STS, X 2010-10-27 Uppgifter till lektion 1: 1. Lös olikheten 2x + 1 > 3. Lösningar till kryssproblemen 1-5. Lösning. Olikheten
Uppsala Universitet Matematiska Institutionen Bo Styf Envariabelanalys, 10 hp STS, X 2010-10-27 Uppgifter till lektion 1: 1. Lös olikheten 2x + 1 > 3. Lösningar till kryssproblemen 1-5. Lösning. Olikheten
Tentamen, del 2 Lösningar DN1240 Numeriska metoder gk II F och CL
 Tentamen, del Lösningar DN140 Numeriska metoder gk II F och CL Lördag 17 december 011 kl 9 1 DEL : Inga hjälpmedel Rättas ast om del 1 är godkänd Betygsgränser inkl bonuspoäng: 10p D, 0p C, 30p B, 40p
Tentamen, del Lösningar DN140 Numeriska metoder gk II F och CL Lördag 17 december 011 kl 9 1 DEL : Inga hjälpmedel Rättas ast om del 1 är godkänd Betygsgränser inkl bonuspoäng: 10p D, 0p C, 30p B, 40p
MAA7 Derivatan. 2. Funktionens egenskaper. 2.1 Repetition av grundbegerepp
 MAA7 Derivatan 2. Funktionens egenskaper 2.1 Repetition av grundbegerepp - Det finns vissa begrepp som återkommer i nästan alla kurser i matematik. Några av dessa är definitionsmängd, värdemängd, största
MAA7 Derivatan 2. Funktionens egenskaper 2.1 Repetition av grundbegerepp - Det finns vissa begrepp som återkommer i nästan alla kurser i matematik. Några av dessa är definitionsmängd, värdemängd, största
Transformationer. Translation. Skalning. Homogena koordinater. Rotation. 2D-grafik. x y. Inom datorgrafik är transformationer den. Många. bevaras.
 Transformationer D-grafik Gustav Taén gustavt@nada.kth.se Inom datorgrafik är transformationer den kanske viktigaste formen av operation. De vanligaste transformationerna är linjära och kan skrivas som
Transformationer D-grafik Gustav Taén gustavt@nada.kth.se Inom datorgrafik är transformationer den kanske viktigaste formen av operation. De vanligaste transformationerna är linjära och kan skrivas som
. (2p) 2x + 2y + z = 4 y + 2z = 2 4x + 3y = 6
 2x + 2y + z = 4 y + 2z = 2 4x + 3y = 6") Kursen bedöms med betyg, 4, 5 eller underkänd, där 5 är högsta betyg För godkänt betyg krävs minst 4 poäng från uppgifterna -7 Var och en av dessa sju uppgifter kan ge maximalt poäng För var och en av
Kursen bedöms med betyg, 4, 5 eller underkänd, där 5 är högsta betyg För godkänt betyg krävs minst 4 poäng från uppgifterna -7 Var och en av dessa sju uppgifter kan ge maximalt poäng För var och en av
SF1624 Algebra och geometri
 Föreläsning 10 Institutionen för matematik KTH 21 november 2016 Dagens och veckans ämnen Idag: Allmänna vektorrum, baser, koordinater, kap 4.1-4.4: Vektorrum och delrum, igen Bas, igen Koordinater med
Föreläsning 10 Institutionen för matematik KTH 21 november 2016 Dagens och veckans ämnen Idag: Allmänna vektorrum, baser, koordinater, kap 4.1-4.4: Vektorrum och delrum, igen Bas, igen Koordinater med
Splinebilen och andra rymdytor
 Splinebilen och andra rymdytor eller Golfbanorna och företagsbilen Michael Litton & Farid Bonawiede Rapporten behandlar konstruktion av splineytor och numerisk integration. Metoder och tillförlitlighet
Splinebilen och andra rymdytor eller Golfbanorna och företagsbilen Michael Litton & Farid Bonawiede Rapporten behandlar konstruktion av splineytor och numerisk integration. Metoder och tillförlitlighet
Avalanche Studios. OpenGL. Vår teknik. Våra spel. Lite inspiration... Stora, öppna spelvärldar. Sandbox-gameplay. Hög audiovisuell standard
 OpenGL Avalanche Studios Sveriges ledande oberoende spelutvecklare Fokus på egenutvecklade IPn Finns på Söder i Stockholm ~6 anställda Just Cause för PS2, PC, XBox, och XBox 36 släpptes 26 Gustav Taxén
OpenGL Avalanche Studios Sveriges ledande oberoende spelutvecklare Fokus på egenutvecklade IPn Finns på Söder i Stockholm ~6 anställda Just Cause för PS2, PC, XBox, och XBox 36 släpptes 26 Gustav Taxén
Lektion 1. Kurvor i planet och i rummet
 Lektion 1 Kurvor i planet och i rummet Innehål Plankurvor Rymdkurvor Innehål Plankurvor Rymdkurvor Tangentvektorn och tangentens ekvation Innehål Plankurvor Rymdkurvor Tangentvektorn och tangentens ekvation
Lektion 1 Kurvor i planet och i rummet Innehål Plankurvor Rymdkurvor Innehål Plankurvor Rymdkurvor Tangentvektorn och tangentens ekvation Innehål Plankurvor Rymdkurvor Tangentvektorn och tangentens ekvation
TANA17 Matematiska beräkningar med MATLAB för M, DPU. Fredrik Berntsson, Linköpings Universitet. 2 november 2015 Sida 1 / 23
 TANA17 Matematiska beräkningar med MATLAB för M, DPU Fredrik Berntsson, Linköpings Universitet 2 november 2015 Sida 1 / 23 Föreläsning 2 Index. Kolon-notation. Vektoroperationer. Summor och medelvärden.
TANA17 Matematiska beräkningar med MATLAB för M, DPU Fredrik Berntsson, Linköpings Universitet 2 november 2015 Sida 1 / 23 Föreläsning 2 Index. Kolon-notation. Vektoroperationer. Summor och medelvärden.
6. Räkna ut integralen. z dx dy dz,
 Institutionen för Matematik, TH Flervariabelanalys SF626. Tentamen den 23 november 29 kl. 8-3 Tillåtet hjälpmedel är Beta Mathematics Handbook. Tydliga lösningar med fullständiga meningar och utförliga
Institutionen för Matematik, TH Flervariabelanalys SF626. Tentamen den 23 november 29 kl. 8-3 Tillåtet hjälpmedel är Beta Mathematics Handbook. Tydliga lösningar med fullständiga meningar och utförliga
TANA17 Matematiska beräkningar med MATLAB för M, DPU. Fredrik Berntsson, Linköpings Universitet. 26 november 2015 Sida 1 / 28
 TANA17 Matematiska beräkningar med MATLAB för M, DPU Fredrik Berntsson, Linköpings Universitet 26 november 2015 Sida 1 / 28 Föreläsning 6 Minsta kvadrat problem. Polynom. Interpolation. Rötter. Tillämpningar:
TANA17 Matematiska beräkningar med MATLAB för M, DPU Fredrik Berntsson, Linköpings Universitet 26 november 2015 Sida 1 / 28 Föreläsning 6 Minsta kvadrat problem. Polynom. Interpolation. Rötter. Tillämpningar:
Tentamen: Numerisk Analys MMG410, GU
 Tentamen: Numerisk Analys MMG41, GU 17-6- 1. Ge kortfattade motiveringar/lösningar till nedanstående uppgifter! Ett korrekt svar utan motivering ger inga poäng! a) Antag att vi arbetar med fyrsiffrig decimal
Tentamen: Numerisk Analys MMG41, GU 17-6- 1. Ge kortfattade motiveringar/lösningar till nedanstående uppgifter! Ett korrekt svar utan motivering ger inga poäng! a) Antag att vi arbetar med fyrsiffrig decimal
Viktiga begrepp, satser och typiska problem i kursen MVE460, 2015.
 Viktiga begrepp, satser och typiska problem i kursen MVE460, 2015. Begrepp och definitioner Egenskaper och satser Typiska problem Reella tal. Rationella tal. a(b + c) = ab + ac Bråkräkning. Irrationella
Viktiga begrepp, satser och typiska problem i kursen MVE460, 2015. Begrepp och definitioner Egenskaper och satser Typiska problem Reella tal. Rationella tal. a(b + c) = ab + ac Bråkräkning. Irrationella
Lösandet av ekvationer utgör ett centralt område inom matematiken, kanske främst den tillämpade.
 1.1 Ekvationslösning Lösandet av ekvationer utgör ett centralt område inom matematiken, kanske främst den tillämpade. 1.1.1 Polynomekvationer Ett polynom i en variabel x är som bekant en summa av termer
1.1 Ekvationslösning Lösandet av ekvationer utgör ett centralt område inom matematiken, kanske främst den tillämpade. 1.1.1 Polynomekvationer Ett polynom i en variabel x är som bekant en summa av termer
Dagens ämnen. Linjära ekvationssystem: Successiv elimination Vektorer Definitionen Grundläggande räkneoperationer Bas och koordinater Ortsvektorer
 Dagens ämnen Linjära ekvationssystem: Successiv elimination Vektorer Definitionen Grundläggande räkneoperationer Bas och koordinater Ortsvektorer Linjära ekvationer Med en linjär ekvation i n variabler,
Dagens ämnen Linjära ekvationssystem: Successiv elimination Vektorer Definitionen Grundläggande räkneoperationer Bas och koordinater Ortsvektorer Linjära ekvationer Med en linjär ekvation i n variabler,
Differentialens geometriska betydelse
 Analys 360 En webbaserad analyskurs Differentialkalkyl Differentialens geometriska betydelse Anders Källén MatematikCentrum LTH anderskallen@gmail.com Differentialens geometriska betydelse 1 (9) Introduktion
Analys 360 En webbaserad analyskurs Differentialkalkyl Differentialens geometriska betydelse Anders Källén MatematikCentrum LTH anderskallen@gmail.com Differentialens geometriska betydelse 1 (9) Introduktion
Uppgifter, 2015 Tillämpad linjär algebra
 Geometri. Uppgifter, 25 Tillämpad linjär algebra. Uppgift. Låt (,, ), B = (, 2, 3), C = (,, ) vara punkter i R 3. () Beskriva på parameter form alla plan som innehåler A, B och C. Ger ett system av linjära
Geometri. Uppgifter, 25 Tillämpad linjär algebra. Uppgift. Låt (,, ), B = (, 2, 3), C = (,, ) vara punkter i R 3. () Beskriva på parameter form alla plan som innehåler A, B och C. Ger ett system av linjära
Fler uppgifter på andragradsfunktioner
 Fler uppgifter på andragradsfunktioner 1 I grafen nedan visas tre andragradsfunktioner. Bestäm a,b och c för p(x) = ax 2 + bx + c genom att läsa av lämpliga punkter i grafen. 10 5 1 3 5 Figur 1: 2 Vi har
Fler uppgifter på andragradsfunktioner 1 I grafen nedan visas tre andragradsfunktioner. Bestäm a,b och c för p(x) = ax 2 + bx + c genom att läsa av lämpliga punkter i grafen. 10 5 1 3 5 Figur 1: 2 Vi har
. b. x + 2 y 3 z = 1 3 x y + 2 z = a x 5 y + 8 z = 1 lösning?
 Repetition, Matematik 2, linjär algebra 10 Lös ekvationssystemet 5 x + 2 y + 2 z = 7 a x y + 3 z = 8 3 x y 3 z = 2 b 11 Ange för alla reella a lösningsmängden till ekvationssystemet 2 x + 3 y z = 3 x 2
Repetition, Matematik 2, linjär algebra 10 Lös ekvationssystemet 5 x + 2 y + 2 z = 7 a x y + 3 z = 8 3 x y 3 z = 2 b 11 Ange för alla reella a lösningsmängden till ekvationssystemet 2 x + 3 y z = 3 x 2
Kappa 1. Robin Kastberg. 10 oktober 2014
 Kappa 1 Robin Kastberg 10 oktober 2014 Sammanfattning Vi visar att uppgiften är lösbar för en generell triangel genom att visa att det är en trivial egenskap för en särskild, och att alla dessa egenskaper
Kappa 1 Robin Kastberg 10 oktober 2014 Sammanfattning Vi visar att uppgiften är lösbar för en generell triangel genom att visa att det är en trivial egenskap för en särskild, och att alla dessa egenskaper
Modul 1: Komplexa tal och Polynomekvationer
 Modul : Komplexa tal och Polynomekvationer. Skriv på formen a + bi, där a och b är reella, a. (2 + i)( 2i) 2. b. + 2i + 3i 3 4i + 2i 2. Lös ekvationerna a. (2 i)z = 3 + i. b. (2 + i) z = + 3i c. ( 2 +
Modul : Komplexa tal och Polynomekvationer. Skriv på formen a + bi, där a och b är reella, a. (2 + i)( 2i) 2. b. + 2i + 3i 3 4i + 2i 2. Lös ekvationerna a. (2 i)z = 3 + i. b. (2 + i) z = + 3i c. ( 2 +
LMA515 Matematik, del B Sammanställning av lärmål
 LMA515 Matematik, del B Sammanställning av lärmål Lärmål för godkänt Funktion, gränsvärde, kontinuitet, derivata. Förklara begreppen funktion, definitionsmängd och värdemängd, och bestämma (största möjliga)
LMA515 Matematik, del B Sammanställning av lärmål Lärmål för godkänt Funktion, gränsvärde, kontinuitet, derivata. Förklara begreppen funktion, definitionsmängd och värdemängd, och bestämma (största möjliga)
SF1625 Envariabelanalys Lösningsförslag till tentamen DEL A. e 50k = k = ln 1 2. k = ln = ln 2
 SF625 Envariabelanalys Lösningsförslag till tentamen 23--24 DEL A. Den :a januari 26 låstes kg av ett visst radioaktivt ämne in i en källare. Ämnet sönderfaller i en takt som är direkt proportionell mot
SF625 Envariabelanalys Lösningsförslag till tentamen 23--24 DEL A. Den :a januari 26 låstes kg av ett visst radioaktivt ämne in i en källare. Ämnet sönderfaller i en takt som är direkt proportionell mot
Laboration 1 i SF1544: Öva på Matlab och konstruera en optimal balk Avsikten med denna laboration är att:
 Laboration 1 i SF1544: Öva på Matlab och konstruera en optimal balk Avsikten med denna laboration är att: - snabbt komma igång med träning på matlabprogrammering (uttnyttja gärna alla schemalagda laborationstillfällen,
Laboration 1 i SF1544: Öva på Matlab och konstruera en optimal balk Avsikten med denna laboration är att: - snabbt komma igång med träning på matlabprogrammering (uttnyttja gärna alla schemalagda laborationstillfällen,
Numeriska metoder, grundkurs II. Dagens program. Exempel Kubiska splines. Ögna igenom de gamla övningsanteckningarna.
 Numeriska metoder, grundkurs II Övning 3 för I Dagens program Övningsgrupp Johannes Hjorth hjorth@nada.kth.se Rum 63:6, Roslagstullsbacken 35 8-79 69 Kurshemsida: http://www.csc.kth.se/utbildning/kth/kurser/d4/numi7
Numeriska metoder, grundkurs II Övning 3 för I Dagens program Övningsgrupp Johannes Hjorth hjorth@nada.kth.se Rum 63:6, Roslagstullsbacken 35 8-79 69 Kurshemsida: http://www.csc.kth.se/utbildning/kth/kurser/d4/numi7
x f x + y f y x. 2 Funktionen f(x, y) uppfyller alltså given differentialekvation.
 uppfyller alltså given differentialekvation.") SF1626 Flervariabelanalys Svar och lösningsförslag till Tentamen 14 mars 211, 8. - 13. 1) Visa att funktionen f, y) = y4 y ) 2 +2 sin är en lösning till differentialekvationen f + y f y = 2f. Lösning:
SF1626 Flervariabelanalys Svar och lösningsförslag till Tentamen 14 mars 211, 8. - 13. 1) Visa att funktionen f, y) = y4 y ) 2 +2 sin är en lösning till differentialekvationen f + y f y = 2f. Lösning:
u(x) + xv(x) = 0 2u(x) + 3xv(x) = sin(x) xxx egentliga uppgifter xxx 1. Sök alla lösningar till den homogena differentialekvationen
 + xv(x) = 0 2u(x) + 3xv(x) = sin(x) xxx egentliga uppgifter xxx 1. Sök alla lösningar till den homogena differentialekvationen") Differentialekvationer I Modellsvar till räkneövning 6 Den frivilliga uppgiften U1 påminner om nyttiga kunskaper, och räknas inte för extrapoäng (fråga vid behov). U1. Lös funktionerna u(x) och v(x) från
Differentialekvationer I Modellsvar till räkneövning 6 Den frivilliga uppgiften U1 påminner om nyttiga kunskaper, och räknas inte för extrapoäng (fråga vid behov). U1. Lös funktionerna u(x) och v(x) från
SF1626 Flervariabelanalys Lösningsförslag till tentamen DEL A
 SF1626 Flervariabelanalys Lösningsförslag till tentamen 216-6-7 DEL A 1. Låt S vara ellipsoiden som ges av ekvationen x 2 + 2y 2 + 3z 2 = 5. (a) Bestäm en normalvektor till S i en punkt (x, y, z ) på S.
SF1626 Flervariabelanalys Lösningsförslag till tentamen 216-6-7 DEL A 1. Låt S vara ellipsoiden som ges av ekvationen x 2 + 2y 2 + 3z 2 = 5. (a) Bestäm en normalvektor till S i en punkt (x, y, z ) på S.
Matematisk analys för ingenjörer Matlabövning 2 Numerisk ekvationslösning och integration
 10 februari 2017 Matematisk analys för ingenjörer Matlabövning 2 Numerisk ekvationslösning och integration Syfte med övningen: Introduktion till ett par numeriska metoder för lösning av ekvationer respektive
10 februari 2017 Matematisk analys för ingenjörer Matlabövning 2 Numerisk ekvationslösning och integration Syfte med övningen: Introduktion till ett par numeriska metoder för lösning av ekvationer respektive
Institutionen för matematik och datavetenskap Karlstads universitet. GeoGebra. ett digitalt verktyg för framtidens matematikundervisning
 Karlstads GeoGebrainstitut Institutionen för matematik och datavetenskap Karlstads universitet Mats Brunström Maria Fahlgren GeoGebra ett digitalt verktyg för framtidens matematikundervisning Invigning
Karlstads GeoGebrainstitut Institutionen för matematik och datavetenskap Karlstads universitet Mats Brunström Maria Fahlgren GeoGebra ett digitalt verktyg för framtidens matematikundervisning Invigning
0.31 = f(x 2 ) = b 1 + b 2 (x 3 x 1 ) + b 3 (x 3 x 1 )(x 3 x 2 ) = ( ) + b 3 ( )(
 = b 1 + b 2 (x 3 x 1 ) + b 3 (x 3 x 1 )(x 3 x 2 ) = ( ) + b 3 ( )(") Lösningar till Tentamen i Beräkningsvetenskap II, 5.0 hp, 2012-03-09 Del A 1. (a) För att anpassa ett polynom som går genom tre punkter behövs ett andragradspolynom. Newtons interpolationsansats ger f(x)
Lösningar till Tentamen i Beräkningsvetenskap II, 5.0 hp, 2012-03-09 Del A 1. (a) För att anpassa ett polynom som går genom tre punkter behövs ett andragradspolynom. Newtons interpolationsansats ger f(x)
ANDRAGRADSKURVOR Vi betraktar ekvationen
 ANDRAGRADSKURVOR Vi betraktar ekvationen Ax + Bxy + Cy + Dx + Fy + G 0 (ekv) där minst en av A,B, eller C är skild från 0 En andragradskurva är mängden av alla punkter vilkas koordinater satisfierar en
ANDRAGRADSKURVOR Vi betraktar ekvationen Ax + Bxy + Cy + Dx + Fy + G 0 (ekv) där minst en av A,B, eller C är skild från 0 En andragradskurva är mängden av alla punkter vilkas koordinater satisfierar en
Beräkning av integraler
 Beräkning av integraler a b f(x) dx = {ytan mellan kurvan och x-axeln från a till b} Många tekniska beräkningsproblem kan formuleras som integraler. En del integraler kan beräknas exakt men flertalet kan
Beräkning av integraler a b f(x) dx = {ytan mellan kurvan och x-axeln från a till b} Många tekniska beräkningsproblem kan formuleras som integraler. En del integraler kan beräknas exakt men flertalet kan
DN1212/numpm Numeriska metoder och grundläggande programmering Laboration 1 Introduktion
 Staffan Romberger 2008-10-31 DN1212/numpm Numeriska metoder och grundläggande programmering Laboration 1 Introduktion Efter den här laborationen ska du kunna hantera vektorer och matriser, villkorssatser
Staffan Romberger 2008-10-31 DN1212/numpm Numeriska metoder och grundläggande programmering Laboration 1 Introduktion Efter den här laborationen ska du kunna hantera vektorer och matriser, villkorssatser
SF1626 Flervariabelanalys Lösningsförslag till tentamen DEL A. 1. En svängningsrörelse beskrivs av
 SF166 Flervariabelanalys Lösningsförslag till tentamen 13-3-1 DEL A 1. En svängningsrörelse beskrivs av ( πx ) u(x, t) = A cos λ πft där amplituden A, våglängden λ och frekvensen f är givna konstanter.
SF166 Flervariabelanalys Lösningsförslag till tentamen 13-3-1 DEL A 1. En svängningsrörelse beskrivs av ( πx ) u(x, t) = A cos λ πft där amplituden A, våglängden λ och frekvensen f är givna konstanter.
Matematiska uppgifter
 Årgång 54, 1971 Första häftet 8. Bestäm alla reella tal x sådana att x 1 3 x 1 + < 0 (Svar: {x R: 1 < x < 0} {x R: < x < 3}) 83. Visa att om x > y > 1 så är x y 1 > x y > ln(x/y). 84. Undersök om punkterna
Årgång 54, 1971 Första häftet 8. Bestäm alla reella tal x sådana att x 1 3 x 1 + < 0 (Svar: {x R: 1 < x < 0} {x R: < x < 3}) 83. Visa att om x > y > 1 så är x y 1 > x y > ln(x/y). 84. Undersök om punkterna
Tentamen TNM077, 3D datorgrafik och animering
 Tentamen TNM077, 3D datorgrafik och animering Grupp: MT2 och NO2MT Datum: Lördagen den 13 mars 2004 Tid: 1400-1800 Hjälpmedel: inga Ansvarig lärare: Stefan Gustavson, ITN, 011-363191 Anvisningar Denna
Tentamen TNM077, 3D datorgrafik och animering Grupp: MT2 och NO2MT Datum: Lördagen den 13 mars 2004 Tid: 1400-1800 Hjälpmedel: inga Ansvarig lärare: Stefan Gustavson, ITN, 011-363191 Anvisningar Denna
ÖVN 11 & 12 DEL A - DIFFTRANS - DEL2 - SF Nyckelord och innehåll. Inofficiella mål
 ÖVN 11 & 12 DEL A - DIFFTRANS - DEL2 - SF1683 HTTP://KARLJODIFFTRANS.WORDPRESS.COM KARL JONSSON Nyckelord och innehåll Komplexa vektorrum U och underrum V U. Linjära höljet: V = span(v 1, v 2,..., v N
ÖVN 11 & 12 DEL A - DIFFTRANS - DEL2 - SF1683 HTTP://KARLJODIFFTRANS.WORDPRESS.COM KARL JONSSON Nyckelord och innehåll Komplexa vektorrum U och underrum V U. Linjära höljet: V = span(v 1, v 2,..., v N
6.3. Direkta sökmetoder
 6.3. Direkta sökmetoder Förutom de nyss nämnda metoderna för att uppsöka ett minimum av en funktion av en variabel finns det en enkel metod som baserar sig på polynomapproximation av funktionen. Om vi
6.3. Direkta sökmetoder Förutom de nyss nämnda metoderna för att uppsöka ett minimum av en funktion av en variabel finns det en enkel metod som baserar sig på polynomapproximation av funktionen. Om vi
Tentamen i Teknisk-Vetenskapliga Beräkningar
 Umeå Universitet Institutionen för Datavetenskap Gunilla Wikström Tentamen i Teknisk-Vetenskapliga Beräkningar Tentamensdatum: 005-03- Skrivtid: 9-5 Hjälpmedel: inga Om problembeskrivningen i något fall
Umeå Universitet Institutionen för Datavetenskap Gunilla Wikström Tentamen i Teknisk-Vetenskapliga Beräkningar Tentamensdatum: 005-03- Skrivtid: 9-5 Hjälpmedel: inga Om problembeskrivningen i något fall
Läsanvisningar till: R.A. Adams, Calculus, a Complete Course, 4th ed.
 Läsanvisningar till: R.A. Adams, Calculus, a Complete Course, 4th ed. Del 2 (funktioner av flera variabler). Omfattning: Kapitel 8.2, 8.3 t.o.m. s 497, 8.4, endast båglängd, 8.5 tom s. 506, 10.1, 10.5,
Läsanvisningar till: R.A. Adams, Calculus, a Complete Course, 4th ed. Del 2 (funktioner av flera variabler). Omfattning: Kapitel 8.2, 8.3 t.o.m. s 497, 8.4, endast båglängd, 8.5 tom s. 506, 10.1, 10.5,
Preliminärt lösningsförslag
 Preliminärt lösningsförslag v4, 9 augusti 4 Högskolan i Skövde (SK) Tentamen i matematik Kurs: MA4G Linjär algebra MAG Linjär algebra för ingenjörer Tentamensdag: 4-8-6 kl 43-93 Hjälpmedel : Inga hjälpmedel
Preliminärt lösningsförslag v4, 9 augusti 4 Högskolan i Skövde (SK) Tentamen i matematik Kurs: MA4G Linjär algebra MAG Linjär algebra för ingenjörer Tentamensdag: 4-8-6 kl 43-93 Hjälpmedel : Inga hjälpmedel
ÖVN 6 - DIFFERENTIALEKVATIONER OCH TRANSFORMMETODER - SF Nyckelord och innehåll. a n (x x 0 ) n.
 n.") ÖVN 6 - DIFFERENTIALEKVATIONER OCH TRANSFORMMETODER - SF683 HTTP://KARLJODIFFTRANS.WORDPRESS.COM KARL JONSSON Nyckelord och innehåll Potensserielösningar Analytiska funktioner Konvergensradie Rot- och
ÖVN 6 - DIFFERENTIALEKVATIONER OCH TRANSFORMMETODER - SF683 HTTP://KARLJODIFFTRANS.WORDPRESS.COM KARL JONSSON Nyckelord och innehåll Potensserielösningar Analytiska funktioner Konvergensradie Rot- och
Rationella punkter på algebraiska kurvor
 Rationella punkter på algebraiska kurvor Robert Nilsson, NA3a 20 maj 2014 Gymnasiearbete Gymnasieskolan Spyken Handledare: Roger Bengtsson Abstract The aim of this text is to investigate dierent methods
Rationella punkter på algebraiska kurvor Robert Nilsson, NA3a 20 maj 2014 Gymnasiearbete Gymnasieskolan Spyken Handledare: Roger Bengtsson Abstract The aim of this text is to investigate dierent methods
Laboration 1: Optimalt sparande
 Avsikten med denna laboration är att: Laboration 1: Optimalt sparande - snabbt komma igång med träning på matlabprogrammering (uttnyttja gärna alla schemalagda laborationstillfällen, - lösa ett optimeringsproblem
Avsikten med denna laboration är att: Laboration 1: Optimalt sparande - snabbt komma igång med träning på matlabprogrammering (uttnyttja gärna alla schemalagda laborationstillfällen, - lösa ett optimeringsproblem