Planetväxelinnovation
|
|
|
- Ludvig Axelsson
- för 7 år sedan
- Visningar:
Transkript

1 Planetväxelinnovation Planetväxel med cylindriska kuggar SIMON HALLIN JESPER LOSO Examensarbete Stockholm, Sverige 2011
2 2

3 Planetväxelinnovation Planetväxel med cylindriska kugg Simon Hallin Jesper Loso Examensarbete MMKB 2011:60 MKNB 043 KTH Industriell teknik och management Maskinkonstruktion SE STOCKHOLM 3
4
5 Examensarbete MMKB 2011:60 MKNB 043 Planetväxelinnovation Planetväxel med cylindriska kuggar Godkänt Sammanfattning Examinator Ulf Sellgren Uppdragsgivare Ulf Sellgren Simon Hallin Jesper Loso Handledare Ellen Bergseth Kontaktperson I den här rapporten presenteras en ny typ av planetväxel. Rapporten är en fortsättning på föregående års kandidatarbete Planetväxelinnovation En studie i hur omkonstruktion av planetväxlar medför effektivare tillverkning (Allvar, Engel, & Karlsson Öhrvall, 2010). Arbetet grundar sig i att konventionella planetväxlars ytterringar är dyra att tillverka, delvis på grund av att de måste härdas efter formgivning. Härdningen gör att ringen blir skev och att den i vissa fall behöver efterbehandlas. Föregående års kandidatarbete hittade två potentiella lösningar till detta problem varav den ena, som vi valt att gå vidare med, var att ha cylindriska kuggar i en ytterring med enklare geometri för härdning. Denna potentiella lösning utreds vidare i denna rapport där formgivning och geometrier för planetväxeln tagits fram i sin helhet. Resultatet i rapporten är en planetväxel med kedjeväxel. Ytterringen har alltså bytts ut till en fixerad stel kedja med cirkulär form, en slags metallring med rullar i. Planethjulen har vidare fått formen av kedjekugghjul samtidigt som solhjulet kan liknas vid ett hamsterhjul, alltså liknande ytterringen fast med kuggingreppet på utsidan av ringen. Rapporten beskriver hur formerna för planetväxeln tagits fram analytiskt och med hjälp av operationer i MATLAB. Illustrationer och animeringar i MATLAB och CAD hjälper också till att beskriva den framtagna planetväxelns beteende. Figur 1 Skapandet av kedjekuggens profil (vänster) och planetväxeln ihopsatt med kedjekugghjul (höger). 1
6 2
7 Bachelor thesis MMKB 2011:60 MKNB 043 Planetary gear innovation Planetary gear train with cylindrical gears Approved Abstract Examiner Ulf Sellgren Commissioner Ulf Sellgren Simon Hallin Jesper Loso Supervisor Ellen Bergseth Contact person This report investigates a new type of planetary gear that was initiated by last year's candidate's work, Planetary gear innovation A study of how redesigning planetary gears leads to more efficient manufacturing (Allvar, Engel, & Karlsson Öhrvall, 2010). Instead of using gear teeth rollers are used for the internal ring wheel. The investigation is based on the fact that the outer ring is expensive to produce due to form changes after hardening, which means that further operations is needed in order to reduce the deformations. Allvar et al. concluded that the outer ring supporting the rollers does not need to be hardened, which can be advantageous for reducing form variations. This was investigated further and a new planetary gear set has been developed. This work has resulted in a planetary gear with chain drive. The outer ring has been replaced by a chain of rigid rollers mounted in metal rings. The planetary gear profile has received the profile by using the outer ring as tool. The sun gear has the same appearance as the outer ring and can be seen as a hamster wheel. In this report the method and simplifications used for designing this new type of planetary gear is described in detail. Figure 1 The chain gears shape is created (left), the planetary gear with chain gears (right). 3
8 4
9 FÖRORD Vi skulle vilja tacka vår handledare Ellen Bergseth för all den hjälp vi fått och vi vill även tacka Stefan Björklund, på KTH Maskinkonstruktion, för att vi fått bolla idéer med honom och fått åsikter och återkoppling från honom. Vi vill även tacka Sören Andersson som var initiativtagare till projektet. Vi vill tacka Lars Johansson på Scania för rundturen vi fick på Scanias kuggtillverkning samt hans bidrag med kloka tankar och funderingar. Slutligen vill vi tacka Johan Hultqvist, Mattias Pers och Tobias Sandström som gav oss en givande opponering. Simon Hallin, Jesper Loso Stockholm, maj
10 6
11 NOMENKLATUR Beteckningar Symbol Beskrivning a Ringhjulsyta (mm 2 ) b Ämnesyta (mm 2 ) b ny Ny ämnesyta (mm 2 ) i Varvtalsutväxling (-) m n n r 1,2,3,c t Normalmodul (mm) Varvtal (rpm) Radie sol-, planet-, ringhjul och planetbärare (mm) Tid (s) u Grundutväxling (-) x Koordinat i horisontalled (mm) y Koordinat i vertikalled (mm) z 1,2,3 Antal tänder sol-, planet- och ringhjul (-) ω 1,2,3,c Vinkelhastighet sol-, planet-, ringhjul och planetbärare (rad/s) α Konstant (-) t Tidssteg (s) θ Vinkelsteg (rad) θ Vinkel (rad) Förkortningar CAD FEM Computer Aided Design Finite Element Method 7
12 8
13 INNEHÅLLSFÖRTECKNING FÖRORD... 5 NOMENKLATUR... 7 INNEHÅLLSFÖRTECKNING INTRODUKTION Bakgrund Syfte Avgränsning Metod REFERENSRAM Planetväxlar Tillverkning av ringhjul Cycloidkugghjul Kedjeväxlar GENOMFÖRANDE Referensplanetväxel Val av ringhjul Kuggprofilsgenerering Animering CAD-modellering RESULTAT Ringhjul Kuggprofil Solhjul Montering/analys Cad-modell DISKUSSION Diskussion Slutsatser REKOMMENDATIONER OCH FRAMTIDA ARBETE Rekommendationer Framtida arbete REFERENSER Bilaga A - Kuggprofilsgenerering Bilaga B - Kuggprofil Bilaga C - Kuggingrepp Bilaga D - CAD-modeller Bilaga E - Matlab-kod
14 10
15 1 INTRODUKTION 1.1 Bakgrund Under föregående års kandidatarbeten i Maskinkonstruktion utreddes hur ringhjul i planetväxlar ska kunna utformas för att minska kostnader och förenkla produktion (Allvar, Engel, & Karlsson Öhrvall, 2010). En av de lösningar som presenterades var att ersätta evolventkuggen i ringhjulet med lösa cylindriska kuggar. Dessa cylindrar skulle hämtas från befintlig tillverkning av rullager och sättas i ett ringhjul som inte skulle behöva efterbearbetas. I rapporten rekommenderades att vidare studier skulle behöva göras på hur en sådan planetväxel skulle utformas med planet och solhjul. Ett förslag på hur en sådan planetväxel skulle kunna se ut presenteras i denna rapport. 1.2 Syfte Syftet var att ta fram och utforma en planetväxel med lösa cylindriska kugg (Allvar, Engel, & Karlsson Öhrvall, 2010). Utseendet på ett ringhjul som använder cylindriska kugg ska tas fram så att det kan användas med avseende på kuggingrepp och hållfasthet. Planethjulen ska kunna fungera tillsammans med det nya framtagna ringhjulet. Slutligen ska geometri tas fram till solhjulet. Dessa geometrier ska göras för att motsvara en referensplanetväxel vad gäller utväxling och momentöverföring. 1.3 Avgränsning För att avgränsa rapporten valdes att fokusera på geometrier för den nya planetväxeln, som alltså har cylindriska kuggar i ringhjulet istället för evolventkugg. För att kunna jämföra den nya planetväxelns utväxling och momentöverföringsförmåga utformades geometrierna på den nya planetväxeln för att vara ekvivalent med den konventionella planetväxeln (referensväxeln). Fullständiga hållfasthetsberäkningar på planetväxeln gjordes inte, projektet inriktades istället på utformningen av de olika delarna i den innovativa planetväxeln. 1.4 Metod I det här arbetet är metod starkt kopplad till resultat. Arbetet har gått ut på att ta fram en metod för att kunna utforma en ny typ av planetväxel. Författarnas kunskaper i produktframtagning och produktutveckling har satts på prov. Detta eftersom konceptet krävde att gamla idéer granskades samtidigt som nya skapades. Mycket av arbetet gick ut på att observera de rörelser som krävs för att planetväxeln skulle fungera. Med andra ord skapades geometrin genom att en tvingad rörelse beskrev en andra rörelse. För att kunna genomföra detta har grundläggande matematik av geometrisk och trigonometrisk karaktär använts. Numerisk programmering har också använts då matematiken har tillämpats i MATLAB, detta för att kunna simulera rörelsen hos planetväxeln. Mer utförliga beskrivningar finns i kapitel 3. 11
16 12
17 2 REFERENSRAM 2.1 Planetväxlar Planetväxlarna är uppbyggda som i figur 2. I mitten sitter ett kugghjul som kallas för solhjul. Runt solhjulet sitter planethjulen och roterar runt solhjulet. Planethjulen sitter i en planetbärare och kan rotera runt sin axel och runt centralaxeln. Det är denna rörelse som kan liknas vid planetrörelser, därav namnet planetväxel. Planethjulen kan variera i antal men tre planethjul är vanligt. Ytterst i planetväxeln sitter en ytterring som kallas för antingen ringhjul eller ytterring. I detta arbete kommer planetväxlar som kallas trehjulsplanetväxlar att studeras. Det innebär inte att det är tre planethjul utan att det är tre kugghjul i serie med varandra. Planetväxlar används frekvent i vår vardag. Detta eftersom planetväxeln har många fördelar bland dem finns (Olsson, 2006): stor effekttäthet, kombinationsmöjligheter, koncentriska axlar, stora utväxlingar och inga resulterande krafter, bara moment. Figur 2 Planetväxelkomponenter i en trehjulsplanetväxel (Allvar, Engel, & Karlsson Öhrvall, 2010) Utväxling Utväxlingen i en planetväxel är varierande beroende på vilken axel som är ingående, utgående samt fix. Det finns, för en trehjulsplanetväxel, sex varianter på hur den kan användas. Gemensamt för dessa är totala varvtalsutväxlingen i k och grundutväxlingen u givna i ekvation (1) resp (2). 13
18 (1) (2) Dessa används sedan genom att man använder det så kallade Looman schemat (Maskinelement Handbok, 2008) som visas i tabell 1. In Ut Fix Varvtalsutväxling 1 3 c 3 1 c 1 c 3 c c 1 c 3 1 Tabell 1 Looman-schema Dimensionering Nedan visas de beteckningar som används vid beräkningar av varvtalsutväxling och dimensionering. Figur 3 - Schematisk bild över trehjulsplanetväxel. 14
19 Figur 4 Planetväxelns parametrar. 2.2 Tillverkning av ringhjul Problem vid tillverkning av ringhjul Det största problemet med tillverkningen av ringhjulet är att det blir skevt efter härdningen på grund av volymförändringar när martensit bildas. Därför måste ringhjulet ofta efterbearbetas, vilket kostar mycket pengar Befintliga lösningar Under ett studiebesök på Scanias kuggtillverkning visades den lösning de använder vid tillverkningen av ringhjulen. Den byggde på att under härdningen så placerades ringhjulen i en form för att sedan sänkas ned och kylas i olja. Detta gör att ringhjulet tvingas att hålla formen under härdningen och gör att ringhjulet hamnar inom godtagbara toleranser. Problemet med detta är att toleranserna inte är så låga som önskvärt samt att detta extra steg i processen givetvis kostar. En annan lösning är att ringhjulet efterbearbetas för att få rätt form. Problemet med att bearbeta härdat stål är att det är kostsamt eftersom det kräver att verktygen klarar av det hårda materialet. 15

20 2.3 Cycloidkugghjul Cycloidkugghjul används när man behöver hög precision och vill få ut låga varvtal. Användningsområden är till exempel robotarmar och klockor (Björklund & Bergseth, 2011). I robotar kallas de just robotväxlar. Denna teknik nämndes i föregående års kandidatarbete där en planetväxel har robotväxlar i stället för evolventkugg. Den cycloidiska planetväxeln skulle då ha cylindriska kugg i ytterringen. En skiva med cycloidkugg placeras sedan i ytterringen (figur 5). Skivan kommer röra sig epicycliskt och sakta rotera på excentrarna. Att skivan rör sig epicycliskt innebär att den kommer rulla på insidan av ringhjulet. Om skivan har två stycken färre tänder än vad ringhjulet har kommer tänderna förskjutas två steg när skivan kommit tillbaka till startpositionen, det vill säga skivan har roterat samma antal varv runt sin egen axel som det antal varv en tand motsvarar. 360 tänder med en tand mer på ringhjulet innebär alltså att skivan förskjutits en tand och därmed snurrat runt sin egen axel 1/360; en grad. För att sedan kunna ha en vanlig roterande rörelse ut från det epicycliska ringhjulet görs hål i skivan. Hålen i skivan kommer dock ha samma epicycliska rörelse som skivan, därför sätter man en axel med mindre radie än excentern på excentern. Excentern kommer vara lagrad mot skivan. Slutligen positioneras axeln så att dess centrum inte sammanfaller med excenterns centrum. Ut kommer i och med detta en traditionell roterande rörelse som sedan kan kopplas till planethjul och solhjul med evolventprofil. Denna lösning existerar dock redan och denna rapport kommer inte titta vidare på dess egenskaper. Excenter Planethjul Skiva med cycloidkugg Figur 5 Planetväxel med cycloidringhjul (Allvar, Engel, & Karlsson Öhrvall, 2010). 2.4 Kedjeväxlar Detta avsnitt förklarar grundläggande skillnader och likheter mellan kedjeväxlar och vanliga kuggväxlar med evolventprofil. Konventionella kedjeväxlar används på till exempel cyklar och motorcyklar. Denna typ av kedjeväxel kallas för kraftkedjor, detta för att de används till att överföra höga moment. Det 16
. En kedja är uppbyggd med länkar och rullar.")
21 finns även kedjedrift i till exempel motorer så som kamkedja. I detta fall ska kedjan snarare överföra rörelse med mycket små moment. I det här arbetet är kedjeväxeln tänkt att överföra höga moment. Figur 6 - Kraftkedja, momentöverförande kedja (The Complete Guide to Chain, 2011). En kedja är uppbyggd med länkar och rullar. På en cykel finns ofta minst ett kugghjul fram och ett kugghjul bak samt en kedja som kopplar ihop dem med varandra. Kedjan sveper runt kugghjulen som också spänner upp kedjan för att få högre friktion och högre antal kuggingrepp. För att kedjan ska kunna böja sig har kedjan länkar. Länkarna är ledade så att de kan snurra runt rullarnas axel, varje länk är kopplad till två rullar. Rullen i sin tur är lagrad och kan alltså snurra runt sin egen axel, detta för att minska slitaget på kedjeväxeln. Eftersom rullen kan rotera runt sin egen axel är tanken att den ska rulla i och ur kedjekuggarna, glidningen blir då kontrollerad i lagret. Om rullen inte hade denna egenskap skulle den glida mot underlaget, vilket skulle ge hög nötning. Kugghjul med evolventprofil däremot både rullar och glider och anses vara bättre än kedjekugg i det avseendet. När man konstruerar kedjor finns det en norm som säger hur de olika delarna i kedjan ska förhålla sig till varandra med avseende på storlek. Denna norm tillämpas även för den framtagna innovativa planetväxeln: (Faulkner, 2006) I den här rapporten presenteras en lösning som skulle kunna fungera för en planetväxel som ska ha cylindriska rullar istället för kuggtänder. Resultatet blev just en slags kedjeväxel. Denna 17


22 kedjeväxel blir så klart annorlunda jämfört med en konventionell kraftkedja, ingen lös kedja fungerar i en planetväxel. Lösningen blev dock väldigt lik en sådan kedja, tanken var att ha en kedja som ytterring och solhjul. Skillnaden är att man inte vill ha en hängande kedja utan ett fast hjul. Detta kan uppnås genom att låsa länkarna till en position där de tillsammans bildar cirklar, solhjul respektive ytterring. I praktiken skulle man kunna tillverka två ringar med hål längs med vardera ringkant, där rullens längd utgör distanseringen mellan ringarna. Detta presenteras i figur 7. Figur 7 - Typskiss på ytterringsprofil med borrade hål för cylindriska kugg. Det finns en till nackdel med kedjedrift - polygoneffekten. Den grundar sig i att den bit av kedjan som sveper om kugghjulet inte kommer vara helt rund utan ha formen av en polygon (flerhörning). Radien kommer då vara olika vid spetsen jämfört med mellan spetsarna (figur 8). Tillsammans med: Figur 8 Cirklar för att illustrera hur en polygon har olika radier. 18
23 (3) (3.1) ger detta en variation i varvtalet, polygoneffekten. Det är oklart hur stor polygoneffekten blir med den framtagna lösningen. I en konventionell kedjedrift har ofta nära hälften av kuggarna kontakt med kedjan, med en låst kedja bör antalet kuggkontakter bli samma som hos evolventkuggväxlar, det vill säga cirka tre, fyra, fem stycken. Dessutom kommer kedjan i den nya planetväxeln inte kunna ändra sin geometri, vilket är den fundamentala egenskapen hos en kedja. Det går även att minska polygoneffekten (även i vanlig kedjedrift) genom att välja ingreppsföljd, till exempel: planethjul ett hoppar i, strax efter hoppar nummer två i, och sist nummer tre, för att sedan börja om (planetväxel med tre planethjul). På så sätt tar ojämnheterna ut varandra, ungefär som ljudvågor som interfererar och släcker ut varandra (Björklund & Bergseth, 2011). I slutändan har man då i teorin inget utväxlingsfel (ojämn kraftöverföring). En annan vanlig lösning på problem med polygoneffekten är att man låter den axeln fjädra, på vilken polygoneffekten skapas. Polygoneffekten är nämligen en diskontinuitet som har väldigt liten amplitud och bara blir ett problem vid väldigt höga varvtal, det vill säga effekten har hög frekvens. Således kan en axel med väl valda dimensioner och elasticitet räcka för att dämpa polygoneffekten till en rimlig nivå. Figur 9 Illustration av kedjeväxel med fast kedja. 19
24 20
25 3 GENOMFÖRANDE 3.1 Referensplanetväxel För att kunna ha ett tydligt mål är det bra om det finns något att jämföra med. I detta fall används en planetväxel från föregående års kandidatarbete (Allvar, Engel, & Karlsson Öhrvall, 2010). Försök har gjorts för att få ta del av en planetväxel som Scania använder i sina växellådor. Det var dock oklart om alla data fanns till förfogande för utomstående. Därmed, samt på grund av tidsbrist, valdes planetväxeln från förra årets kandidatarbete. Detta anses vara en bra referensplanetväxel. Beskrivning Beteckning Värde Enhet Kuggtal solhjul z 1 30 [-] Kuggtal planethjul z 2 15 [-] Kuggtal ringhjul z 3 60 [-] Normalmodul m n 2 [mm] Radie solhjul r 1 30 [mm] Radie planethjul r 2 15 [mm] Radie ringhjul r 3 60 [mm] Tabell 2 Referensplanetväxeldata (Allvar, Engel, & Karlsson Öhrvall, 2010) 3.2 Val av ringhjul För att bestämma ringhjulets utformning studerades tidigare års rapport och koncept (Allvar, Engel, & Karlsson Öhrvall, 2010). Med hjälp av handledare och i samråd med andra erfarna personer (Björklund & Bergseth, 2011) diskuterades fördelar och nackdelar med deras koncept med cylindriska kugghjul. I och med detta togs olika lösningar fram för att minimera nackdelar och framförallt hitta en lösning som skulle kunna fungera i en planetväxel. 3.3 Kuggprofilsgenerering För att generera en kuggprofil till planethjulen som passar till ringhjulet användes MATLAB. De cylindriska kuggarna i det yttre ringhjulet skapades och placerades ut efter referensväxelns dimensioner (Allvar, Engel, & Karlsson Öhrvall, 2010). Ett ämne skapades och placerades i origo. Måtten på detta ämne baseras på den delningsradie som tagits fram och hur långa kuggarna ska vara. Genom att tvinga fram den rörelse som ringhjulet har mot planethjulet formas planethjulet efter hur de cylindriska kuggarna rör sig. Rörelsen tas fram genom att räkna ut antal kugg för planethjul respektive ringhjul med avseende på referenspanetväxlens utväxling, vilket i vårt fall blir exakt lika med antal kugg som referensplanetväxeln (Allvar, Engel, & Karlsson Öhrvall, 2010). Ringhjulet roteras runt ämnet och plockar bort det material där cylindrarna går in i ämnet. Man kan säga att cylindrarna fräser ur kuggprofilen. På så vis får vi en kuggprofil utan att beskriva den med matematiska formler. 21
26 Figur 10 - Generering av kugghjul i MATLAB. Kuggprofilen kan skapas med hjälp av godtyckliga dimensioner. Det gör också att vi får en profil som kan användas vid beräkningar av glidning vid kuggingrepp samt att vi kan använda den för att modellera ett planethjul i en CAD-programvara. Detta steg kräver en hel del programmering för att det ska fungera med ingenjörsmässig noggrannhet. För stora toleranser (diskretisering) i detta steg ger en profil som kan generera trunkeringsfel (avrundningsfel) då profilen är grunden för övriga åtgärder och i slutändan kan påverka resultaten. Bilder från genereringen finns i Bilaga A Delningscirklar Som utgångspunkt för profilgenereringen, byggs geometrin enligt de dimensioner som tagits från tidigare års arbete. Eftersom planetväxelns geometri bygger på cirklar skapas delningscirklarna enligt: (4) (5) Där i = 1,2,3,4 för de olika cirklarna definierade i figur 4 och θ är en vektor som går från 0 till 2π (ett varv). Även en cirkel skapas för att beskriva planetbärarens rotation och radien blir naturligt: Längden på vektorn θ bestämmer upplösningen på cirklarna. Ju fler element desto högre upplösning och mer exakta beräkningarna Planethjulet För det ämne som planethjulet ska skapas av, adderas ett värde α, i radiell led, som avgör höjden på kuggarna. Ekvationen som skapar ämnet ges av: (6) (7) 22
27 (8) Ringhjulet De cylindriska kuggarna placeras ut genom att beräkna punkter på ringhjulets delningscirkel: (9) (10) där n = 1,2,3,,z 2 Ringhjulet skapas genom att kuggarnas koordinater sätts samman i en x-vektor och en y-vektor. Som ser ut enligt (11) och (12) (11) (12) Uppställning av växel För generering av planethjulen används inte solhjulet. Planethjulet placeras med sitt centrum i origo och ringhjulet med cylindriska kuggen placeras ut med radien r c i den punkten som motsvarar centrum i planetväxeln. Nu ser uppställningen ut som i figur 11, som är utgångsläget för genereringen Rotering Figur 11 Uppställning inför kuggprofilsgenerering Sambandet mellan planethjulets och ringhjulets vinkelhastighet bestäms enligt vanliga beräkningar (Litvin & Fuentes, 2004) av kuggväxlar: 23
28 (13) där minustecknet kommer av att det är ett hypocykliskt kuggingrepp. För att enklast programmera sätts planethjulet till att vara fast och inte rotera. Detta görs genom att transformera koordinatsystemet från ett där båda centrum på kugghjulen är fixa till ett som är fixt med planethjulet. Detta innebär att centrumpunkten nu istället får en vinkelhastighet som motsvarar planethjulets och att ringhjulet får en vinkelhastighet där planethjulets vinkelhastighet adderas. Det nya systemet beskrivs i figur 12 där den streckade cirkeln representerar centrumpunktens rotation kring planethjulet. Figur 12 Det nya systemet med nya koordinatsystemet. Roteringen görs tidsberoende så varje iteration sker med bestämt tidsinterval. Vinkeln som cirklarna roterar varje iteration är: Med detta kan, genom transformation till polära koordinater, vinkeln adderas till ringhjulets vinkelvektor och centrumpunktens vinkelvektor och sedan återtransformeras för att slutligen utplaceras och slutligen påbörja nästa iteration Boolsk algebra (14) (15) Under varje tidsiteration genomförs en Boolsk algebra beräkning som beskrivs enligt (16) Där b ny är det nya ämnet, a är de cylindriska kuggarna och b är ämnet från föregående iteration. Boolsk algebra bygger på att beräkningar görs på hur ytor överlappar varandra och man kan välja hur man vill att de ska interagera. I vårt fall används ämnet och från det tas ytor bort där kuggen överlappar. Detta visas principiellt i figur 13 där den röda ytan blir den nya ytan. 24
29 Figur 13 Principiellt Boolsk algebra subtraktion. 3.4 Animering För att bättre förstå hur den nya planetväxeln med kedjeväxel kommer fungera i drift gjordes en animering i MATLAB. Där lades det skapade kugghjulet in i en plot tillsammans med cylindrar lagda i en cirkel, för att efterlikna ett ringhjul med cylindriska kugg. Denna plot uppdaterades med hjälp av iterationer där de geometriska villkoren beräknades analytiskt. Till exempel väljs som fix, till en radian per sekund och enligt 13 omskriven (17) Animeringen visar hur kuggkontakten blir med den nya planetväxeln med kedjekugg. Det intressanta i animeringen är framför allt att man kan förstå och studera glidning, men även polygoneffekten (se avsnitt 2.4). Figur 14 Animering (fryst) av planetväxeln i MATLAB. 25
30 3.5 CAD-modellering Sista momentet är att skapa den nya lösningen i CAD-programvaran (Solid Edge ST2). Kugghjulet importeras via en tabell som exporteras från MATLAB. De övriga delarna skapas i CAD-miljö. Slutligen monteras alla delarna ihop och utväxlingsvillkor läggs till för att modellen ska kunna beskriva hur en verklig planetväxel skulle kunna se ut. CAD-modellen ger en övergripande bild av hur lösningen ser ut och förståelse för vad som kan ge upphov till komplikationer i en verklig modell. 26
31 27
32 4 RESULTAT 4.1 Ringhjul Efter mycket funderande och diskussioner med vår handledare Ellen Bergseth och Stefan Björklund kom vi fram till att den lösningen som presenterades i föregående års kandidatarbete med cylindriska kugg i ett ringhjul med spår för kuggen inte är tillämpbart. Detta eftersom planethjulens kuggprofil skulle begränsas i kuggarnas höjd, se figur 15. Figur 15 Ej fungerande kuggprofil. Det skulle sedan resultera i att kuggingreppet skulle gå ur innan nästkommande kuggingrepp tar i. Resultatet av detta skulle bli en kuggväxel som inte fungerar (figur 16). Enda lösningen för att kunna använda tidigare års lösning vore att planethjulen skulle röra sig excentriskt som i en robotväxel. Detta skulle leda till problem vid konstruering av solhjulet. 28

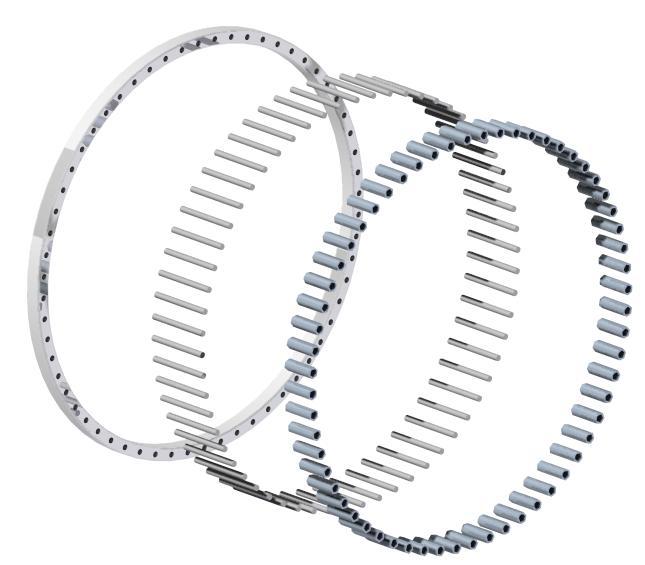
33 Figur 16 Ej fungerande kuggväxel. Kuggarna utsätts för punktbelastning. För att kuggarnas höjd skulle kunna ökas blev lösningen att ringhjulet skulle formas som ett ekorrhjul. För detta behövs därmed två ringar med hål för de cylindriska kuggarna. Denna lösning skiljer sig mycket från föregående års lösning. Med andra ord kommer det att krävas fler analyser än de som tidigare gjorts. Figur 17 Sprängskiss på ringhjulet med cylindriska kugg. 29
34 4.2 Kuggprofil Efter genereringen av kuggprofilen får vi en profil enligt figur 18. Vid närmare granskning är den inte helt olik evolventprofilen. Fler bilder från genereringen av kuggen presenteras i Bilaga A och bilder på kugghjulet finns i Bilaga B. Figur 18 Den genererade kuggprofilen. 4.3 Solhjul Solhjulet gjordes som en nedskalad version av ringhjulet. Eftersom vi använder samma delning mellan cylindrarna passar båda till den framtagna profilen. Ett alternativ till den valda lösningen vore att kontrollera om solhjulet kunde skapas på samma sätt som planethjulen och på så sätt kontrollera hur mycket det skiljer sig från evolventprofilen. 4.4 Montering/analys Efter att de ingående delarna är ihopsatta i CAD programmet animeras rörelserna i planetväxeln genom att använda MATLAB och Solid Edge. Det vi kan urskilja är att planetväxel passar ihop och de beräkningar som gjorts angående utväxlingar stämmer. Från denna animering kan vi även zooma in för att granska kuggingreppen. 30
35 4.4.2 Kuggingrepp Figur 19 Planetväxellösningen i sin helhet. Simuleringen visar inget tecken på direkt interferens, det vill säga kuggingreppen ser ut att fungera tillfredsställande. De cylindriska kuggarna följer planethjulens profil som det var tänkt. Bilder över kuggingreppen finns i Bilaga C. 31
36 4.4.2 Glidning Figur 20 Kuggingrepp mellan solhjul och planethjul En problematik som upptäcktes under simuleringen är att kuggingreppen till stor del består av glidning och inte rullning. Detta leder till att det kan bli stor nötning i kuggingreppen och på så vis kan livslängden bli kort. En lösning på denna problematik fann vi i kedjeväxlarna. Där sitter en hylsa över kedjeingreppen som fungerar som ett glidlager. På så sätt kan man få mer kontroll över glidningen tillsammans med smörjning minimera nötningen. En annan problematik med glidning är att det innebär friktion vilket är lika med förluster i systemet Klämning Ytterligare problematik som kan uppkomma är klämning. Detta sker om de cylindriska kuggarna har större diameter än vad kuggingreppet har, på så vis kläms kuggarna fast i varandra och försämrar växelns prestanda. Det är enkelt att undgå genom att se till det ges en marginal mellan de två diametrarna. Men marginalen möjliggör även glapp i växeln och därför måste det noga övervägas. 4.5 Cad-modell Det sista som görs i detta arbete är att sammanställa lösningen i en CAD-modell. Nedan visas bilder från hur detta ser ut och ger en övergripande bild av hur planetväxeln principiellt skulle kunna se ut. Fler bilder finns i Bilaga D. 32
37 Ringhjul Solhjul Lagerhylsa Planethjul Pin Planetbärare Figur 21 Sprängskiss över den framtagna lösningen. Figur 22 Inzoomning på ett planethjul i CAD-miljö. 33
38 Figur 23 Planetväxeln ihopsatt i CAD. 34
39 35
40 5 DISKUSSION 5.1 Diskussion Tillverkning Syftet med denna rapport var att undersöka om det går att ta fram en planetväxel med lösa cylindriska kuggar. Rapporten bygger vidare på ett kandidatarbete som publicerades 2010 där cylindriska rullar i ytterringen rekommenderas för att billigare kunna tillverka ytterringar till planetväxlar. De menade att lösningen kunde vara genomförbar och framför allt lönsam. I den här studien presenteras en planetväxel med cylindriska rullar istället för ett traditionellt ringhjul (Figur 23). Innan det går att avgöra lönsamheten så måste fler beräkningar, både ekonomiska och tekniska, göras. Tillverkningen av planethjulet som presenteras i den här rapporten (Figur 18) anser vi vara lika dyrt att tillverka som ett planethjul med evolventprofil eftersom båda typerna kan tillverkas av samma material. Profilen är bara beroende av verktygets form och rörelse. Kedjekugg, liknande det vi tagit fram, i sig är inte något nytt och innovativt utan tillverkas idag i stora serier till bland annat cyklar och motorcyklar. För ett företag som Scania skulle däremot en ny typ av planetväxel, oavsett utseende, vara en stor omställning. Förutsatt att den nya planetväxeln har exakt samma dimensioner utvändigt som deras nuvarande planetväxlar skulle de ändå behöva byta ut verktyg och i värsta fall köpa nya maskiner. Härdugnen på fabriken kan de inte heller göra sig av med utan behövs för andra komponenter. Detta tar vi inte hänsyn till. Ringhjulet föreslås bestå av en slags ram var på cylindrar, med fördel tagna från rullager, monteras. Detta innebär att monteringsprocessen blir något mer komplicerad jämfört med konventionella ringhjul, men till skillnad från konventionella ringhjul måste det föreslagna ringhjulet inte härdas. Tillverkningen av ramen (Figur 7) anses vara mindre komplicerad än för ett konventionellt ringhjul som brotchas och därmed också billigare. I den här studien har många antaganden gjorts. Det krävs fler beräkningar för att avgöra om lösningen är billigare än en konventionell planetväxel i praktiken Hållfasthet Lösningen, en ny typ av planetväxel, som presenterats i denna rapport kan efter en första bedömning se ut att ha klart sämre hållfasthet än en planetväxel med evolventprofil. Kuggarnas ser spetsiga och smala ut och man kan fråga sig om de inte går av vid belastning. Detta har mycket att göra med själva generingen av profilen i MATLAB. Profilen går lätt att ändra så att spetsarna blir bredare, så detta borde inte bli ett problem. Vid mötet på Scania diskuterade vi med en kuggtekniker. Han nämnde att de inte hade några problem med hållfasthet i deras planetväxlar. De var mest bekymrade om ljudgeneringen från planetväxeln. Detta diskuteras längre fram i detta kapitel. Om hållfastheten skulle visa sig vara låg med hjälp av FEM-beräkningar av planetväxeln med kedjekugg är det möjligt öka bredden på kuggen och på så sätt lösa eventuella hållfasthetsproblemet Form Det framtagna hjulet skulle antagligen behöva modifieras för att undvika höga kontakttryck precis som görs med evolventkugg. Det framtagna planethjulet är underskuret en aning. Detta kan också modifieras. 36
41 5.1.4 Utväxling Utväxlingen hos en planetväxel med evolventprofil kan räknas ut enbart genom att räkna antalet kuggar enligt Loomanschemat (tabell 1). Eftersom Loomanschemat inte är begränsat till evolventer kan samma beräkning utföras med den nya typen av planetväxel Ljud Vår kontakt på Scania menade att ljudet var det mest centrala i utvecklingen av växellådor i allmänhet, och därmed också planetväxlar. Ljudets centrala roll diskuteras grundligt i (MackAldener, 2001). Om planetväxeln med kedjekugg skulle bli aktuell för Scania uppstår därmed denna frågeställning även för vår planetväxel. Detta har inte undersökts men kan alltså komma att bli viktigt om fortsatta studier planeras. Eftersom formfel ofta är orsaken till ljudalstring, så finns det goda chanser att den presenterade planetväxeln kan bli tystare än en konventionell planetväxel Alternativt solhjul När slutet av denna undersökning närmade sig hittades ytterligare en potentiell förbättring för den nya planetväxeln, ett alternativ till solhjulet. Att ha ett vanligt, solitt kugghjul som solhjul, är troligen önskvärt hos tillverkare. Därför gjordes en kuggprofil utformad för att passa till det nya planethjulet. Utformningen gjordes på samma sätt som planethjulet gjordes i MATLAB, nu var det dock planethjulet som fräste ur solhjulet. Solhjulets profil skulle se ut som figur 24. Figur 24 Alternativt solhjul istället för stel kedja som solhjul. 37
42 5.2 Slutsatser Det går att utforma en planetväxel med cylindriska kugg. Lönsamheten behöver undersökas vidare för att avgöra om växeln har potential att börja tillverkas. Hållfastheten och ljudgenereringen för den nya planetväxeln måste undersökas och jämföras mot konventionella planetväxlar. 38
43 39
44 6 REKOMMENDATIONER OCH FRAMTIDA ARBETE 6.1 Rekommendationer Vi rekommenderar fortsatta studier på den framtagna innovativa planetväxeln. Inget pekar på att planetväxeln skulle vara dyrare än den konventionella referensplanetväxeln. Fortsatta studier behövs dock då alla aspekter inte är undersökta och många antaganden är gjorda i denna rapport. Undersökning av den nya planetväxelns ljudgenerering har högsta prioritet då tillverkare har störst problem med detta. 6.2 Framtida arbete FEM-beräkning För att fastställa slutgiltiga mått på den nyutvecklade planetväxeln behövs en djupare analys av hållfastheten. En FEM-beräkning med eventuell optimering borde räcka för att se om planetväxeln skulle kunna ersätta den konventionella planetväxeln. Detta främst med avseende på mått då vi, som tidigare beskrivet, antar att mer material (ökad bredd) kan lösa eventuella hållfasthetsproblem Ekonomisk analys En ekonomisk analys av den nya planetväxeln med kedjekugg skulle kunna göras först när måtten är fastställda. Då kan man inkludera materialkostnaden och vidare titta på tillverkningsmetoder och montering av ringhjulets delar Ljud-analys För att den nya planetväxeln ska kunna användas i till exempel lastbilar måste ljudnivån vara på en godtagbar nivå. Därför bör ljudnivån för den nya planetväxeln undersökas innan den färdiga produkten presenteras. Ett sätt att göra detta på kan vara att beräkna transmissionsfelet för olika marginaler/glapp och eventuella monteringsfel. Innan en prototyp tas fram bör detta utredas och resultaten jämföras med en konventionell planetväxel med samma prestanda Alternativa solhjul När den nya profilen med kedjekugg togs fram lades det märke till att den var väldigt lik evolventprofil, om man bortsåg från halvcirkeln. Detta bör undersökas vidare. Om det skulle visa sig just det så skulle solhjulet kunna få evolventprofil och planetväxeln skulle eliminera problemet med dyra ringhjul samtidigt som solhjulet är desamma som i konventionella planetväxlar. Om denna innovativa planetväxel skulle skapa uppmärksamhet hos större tillverkare skulle de vara ännu mer intresserade om de kunde använda sig till viss del av befintliga maskiner. Det alternativa solhjulet som togs fram i slutet av arbetet är inte utvärderat. Det borde undersökas om det går att ersätta med evolvent. Många kugghjul fungerar så att de kan rulla mot sin egen profil. Därför borde det undersökas om det framtagna planethjulet också kan fungera som solhjul. 40
45 41
46 7 REFERENSER Allvar, M., Engel, K., & Karlsson Öhrvall, V. (2010). Planetväxelinnovation - En studie i hur omkonstruktion av planetväxlar medför effektivare tillverkning. Stockholm: KTH - Instutitionen för Maskinkonstruktion. Björklund, S., & Bergseth, E. (april; maj 2011). Associate professor; Ph.D Student. (J. Loso, & S. Hallin, Intervjuare) Faulkner, L. (2006). Standard Handbook of Chains, Chains for Power Transmission and Material Handling. Columbus, Ohio, USA: American Chain Association. Litvin, F. L., & Fuentes, A. (2004). Gear geometry and applied theory. Cambridge: Cambridge University Press. MackAldener, M. (2001). Robust noise characteristic of gears due to their application, manufacturing errors and wear. Stockholm: Royal Institute of Technology. Maskinelement Handbok. (2008). Stockholm: Institutionen för Maskinkonstruktion, KTH. Olsson, K.-O. (2006). Maskinelement. Stockholm: Liber AB. The Complete Guide to Chain. (2011). Hämtat från structure-power-transmission-chain.html den 28 april
47 43
48 BILAGA A - KUGGPROFILSGENERERING 44
49 45
50 46
51 47
52 48
53 49 BILAGA B - KUGGPROFIL
54 50
55 51 BILAGA C - KUGGINGREPP
56 52
57 53
58 54

59 55 BILAGA D - CAD-MODELLER
60 56
61 57
62 BILAGA E - MATLAB-KOD Dimensionering %% Kandidatarbete "Planetväxelinnovation" % Planetväxel dimensionering % Simon Hallin & Jesper Loso % clc,clear all, close all % Kuggtal z1 = 30; z2 = 15; z3 = 60; % Modul m = 2*10^-3; % [m] % Diametrar d1 = m*z1; d2 = m*z2; d3 = m*z3; % Radier r1 =d1/2; r2 =d2/2; r3 =d3/2; % Kuggvinkel kv1 = 2*pi/z1; kv2 = 2*pi/z2; kv3 = 2*pi/z3; % Pitch p1 =d1*sin(pi/z1); p2 =d2*sin(pi/z2); p3 =d3*sin(pi/z3); % Delningsdiameter pd = p1*(5/16); % Delningsradie rd = p1*(5/8); % Exportera data save('kuggdim') Kuggprofilsgenerering %% Kandidatarbete "Planetväxelinnovation" % Kugg-generering % Simon Hallin & Jesper Loso % close all; clc; clear all; format long % tidsberoende 58
63 %% Basvariabler R1 = ; R2 = 0.06; R3 = ; kugg antal_punkter = 500; kvot2 = R2/R1; T = 1/2; t = linspace(0,t,antal_punkter*t); C2.omega = (2*pi); C4.omega = -C2.omega*kvot2; fi= linspace(0,2*pi,antal_punkter); n=1; % Radie på planethjul % Radie på ringhjul % Radie på cylindriska % Vinkelvektor %% Skapa cirklar % C1 Planethjul C1.x = (R1+1.5*R3)*cos(-fi); C1.y = (R1+1.5*R3)*sin(-fi); % C2 Ringhjul C2.x = R2*cos(fi); C2.y = R2*sin(fi); C2_antal_kugg = 60; % C3 Cylindrisk kugg C3.x = R3*cos(-fi); C3.y = R3*sin(-fi); % C4 Delningscirkel C4.x = (R2-R1)*cos(fi); C4.y = (R2-R1)*sin(fi); C4.x0 = 0; C4.y0 = 0; % kontroll av cirklar figure(1) plot(c1.x,c1.y,c2.x,c2.y,c3.x,c3.y) axis equal; grid on legend('planethjul', 'Ringhjul', 'Cylindrisk kugg') figure('position',[ ]) %% Rotering av kugghjul for ii = 1:length(t) ii; C3.x1=[]; C3.y1=[]; C4.fi_temp = t(ii)*c4.omega; C2.fi_temp = t(ii)*c2.omega+c4.fi_temp+2*pi/c2_antal_kugg; for i=1:c2_antal_kugg fi_temp = 2*pi/C2_antal_kugg*i+C2.fi_temp ; C3temp.x = C3.x+R2*cos(fi_temp); C3temp.y = C3.y+R2*sin(fi_temp); C3.x1=[C3.x1 NaN C3temp.x]; C3.y1=[C3.y1 NaN C3temp.y]; 59
64 end % rotering av ringhjul runt delningscirkeln C4.fi_temp = t(ii)*c4.omega; C2temp.x = C2.x+(R2-R1)*cos(C4.fi_temp); C2temp.y = C2.y+(R2-R1)*sin(C4.fi_temp); % Rotering av de cylindriska kuggen C3temp.x = C3.x1+(R2-R1)*cos(C4.fi_temp); C3temp.y = C3.y1+(R2-R1)*sin(C4.fi_temp); [C1.x, C1.y] = polybool('subtraction', C1.x, C1.y, C3temp.x, C3temp.y); subplot(1,2,1); plot(c1.x, C1.y, C2temp.x, C2temp.y, C3temp.x, C3temp.y) axis square; axis equal axis([(-(r1+2*r3)),r1+2*r3,-(r1+2*r3),r1+2*r3]) F1(ii) = getframe; subplot(1,2,2); plot(c1.x, C1.y, C2temp.x, C2temp.y, C3temp.x, C3temp.y) axis square; axis equal axis([(-2*r2),2*r2,-2*r2,2*r2]) F2(ii) = getframe; % if ii==n % pause % n=n+10; % end pause(0.1) end figure(3) plot(c1.x, C1.y) title('slutgiltig form') axis square; axis equal axis([(-(r1+2*r3)-5),r1+2*r3+5,-(r1+2*r3)-5,r1+2*r3+5]) save('kuggprofildata3') Databehandling %% Kandidatarbete: Cylindriska kugg % Databehandling % Simon Hallin & Jesper Loso % Skapad clc, clear all, close all data = open('kuggprofildata.mat'); Film1=data.F1; Film2=data.F2; kuggpr = data.c1; visafilm1 = 1; visafilm2 = 0; sparafilm1 = 0; sparafilm2 = 0; export_excel= 0; 60
65 %% Visar film 1 if visafilm1 ==1 [h, w, p] = size(film1(1).cdata); % use 1st frame to get dimensions hf = figure; % resize figure based on frame's w x h, and place at (150, 150) set(hf, 'position', [ w h]); axis off % tell movie command to place frames at bottom left movie(hf,film1,2,30,[ ]); end %% Visar film 2 if visafilm2 == 1 [h, w, p] = size(film2(1).cdata); % use 1st frame to get dimensions hf = figure; % resize figure based on frame's w x h, and place at (150, 150) set(hf, 'position', [ w h]); axis off % tell movie command to place frames at bottom left movie(hf,film2,2,30,[ ]); end %% Sparar film 1 if sparafilm1 == 1 movie2avi(film1,'kuggprofil1') end %% Sparar film 2 if sparafilm2 == 1 movie2avi(film2,'kuggprofil2') end %% Exporterar till Excel % Se till att excel-filen inte existerar för att punkter då kan bli kvar! if export_excel == 1 exl = [1000*kuggpr.x' 1000*kuggpr.y' zeros(length(kuggpr.x),1)]; [status, message] = xlswrite('kuggprofil_koord',exl) size(exl) end Animering %% Kandidatarbete "Planetväxelinnovation" % Animering % Simon Hallin & Jesper Loso % clc,close all,clear all load('kuggprofildata') %t = linspace(0,2*t,2*antal_punkter*t); C3.x1=[]; C3.y1=[]; C5.x1=[]; C5.y1=[]; modul = 2*R2/C2_antal_kugg; pitch = pi*modul; kv3= 2*pi/C2_antal_kugg; % Solhjul R5= R2-2*R1; C5_antal_kugg=round(2*R5/modul); 61
66 for i=1:c5_antal_kugg fi_temp = 2*pi/C5_antal_kugg*i; C5temp.x = C3.x+R5*cos(fi_temp); C5temp.y = C3.y+R5*sin(fi_temp); C5.x1=[C5.x1 NaN C5temp.x]; C5.y1=[C5.y1 NaN C5temp.y]; end % Ringhjul for i=1:c2_antal_kugg fi_temp = 2*pi/C2_antal_kugg*i+kv3/2; C3temp.x = C3.x+R2*cos(fi_temp); C3temp.y = C3.y+R2*sin(fi_temp); C3.x1=[C3.x1 NaN C3temp.x]; C3.y1=[C3.y1 NaN C3temp.y]; end % polära koordinater [C1_pol.FI C1_pol.R] = cart2pol(c1.x,c1.y); [C5_pol.FI C5_pol.R] = cart2pol(c5.x1,c5.y1); [C3_pol.FI C3_pol.R] = cart2pol(c3.x1,c3.y1); omega5 = 1; omega1 = -omega5*r5/r1; omega3 = omega1*r1/r2; antal_planethjul = 3; pos_planethjul.x = (R2-R1)*cos(linspace(0,2*pi*(1-1/antal_planethjul),antal_planethjul)); pos_planethjul.y = (R2-R1)*sin(linspace(0,2*pi*(1-1/antal_planethjul),antal_planethjul)); %figure('units','normalized','outerposition',[ ]); hf = figure; % resize figure based on frame's w x h, and place at (150, 150) set(hf, 'position', [ ]); axis off % tell movie command to place frames at bottom left for ii=1:length(t) C1_fi_temp= omega1*t(ii); C3_fi_temp= omega3*t(ii); C5_fi_temp= omega5*t(ii); [C1temp.x1 C1temp.y1] = pol2cart(c1_pol.fi-c1_fi_temp,c1_pol.r); [C1temp.x2 C1temp.y2] = pol2cart(c1_pol.fi-c1_fi_temp,c1_pol.r); [C1temp.x3 C1temp.y3] = pol2cart(c1_pol.fi-c1_fi_temp,c1_pol.r); [C5temp.x C5temp.y] = pol2cart(c5_pol.fi-c5_fi_temp,c5_pol.r); [C3temp.x C3temp.y] = pol2cart(c3_pol.fi-c3_fi_temp,c3_pol.r); plot(c1temp.x1+pos_planethjul.x(1), C1temp.y1+pos_planethjul.y(1),C1temp.x2+pos_planethjul.x(2),... C1temp.y2+pos_planethjul.y(2),C1temp.x3+pos_planethjul.x(3), C1temp.y3+pos_planethjul.y(3),C3temp.x, C3temp.y,C5temp.x, C5temp.y) axis([1*r1,3*r1,-1*r1,1*r1]) axis normal F(ii) = getframe(gcf); pause(0.01) end %movie2avi(f,'animering3','compression','indeo3') 62
67 63
Välkomna till Gear Technology Center. 1
 Välkomna till Gear Technology Center www.geartechnologycentre.se 1 Vilka är ni och vad förväntar ni er av kursen? www.geartechnologycentre.se 2 Redan de gamla grekerna www.geartechnologycentre.se 3 Redan
Välkomna till Gear Technology Center www.geartechnologycentre.se 1 Vilka är ni och vad förväntar ni er av kursen? www.geartechnologycentre.se 2 Redan de gamla grekerna www.geartechnologycentre.se 3 Redan
Tentamen MF1039 DoP Komponenter
 Tentamen MF1039 DoP Komponenter 2012 torsdag 15 mars 14-18 Tillåtna hjälpmedel är: Skrivmaterial, Miniräknare, Maskinelement Handbok, SKF-katalog NAMN: Personnummer: Tentamen består av: 25 p A-del 1-6
Tentamen MF1039 DoP Komponenter 2012 torsdag 15 mars 14-18 Tillåtna hjälpmedel är: Skrivmaterial, Miniräknare, Maskinelement Handbok, SKF-katalog NAMN: Personnummer: Tentamen består av: 25 p A-del 1-6
TANA17 Matematiska beräkningar med Matlab
 TANA17 Matematiska beräkningar med Matlab Laboration 1. Linjär Algebra och Avbildningar Namn: Personnummer: Epost: Namn: Personnummer: Epost: Godkänd den: Sign: Retur: 1 Introduktion I denna övning skall
TANA17 Matematiska beräkningar med Matlab Laboration 1. Linjär Algebra och Avbildningar Namn: Personnummer: Epost: Namn: Personnummer: Epost: Godkänd den: Sign: Retur: 1 Introduktion I denna övning skall
Andra EP-laborationen
 Andra EP-laborationen Christian von Schultz Magnus Goffeng 005 11 0 Sammanfattning I denna rapport undersöker vi perioden för en roterande skiva. Vi kommer fram till, både genom en kraftanalys och med
Andra EP-laborationen Christian von Schultz Magnus Goffeng 005 11 0 Sammanfattning I denna rapport undersöker vi perioden för en roterande skiva. Vi kommer fram till, både genom en kraftanalys och med
Forma komprimerat trä
 Forma komprimerat trä - maskinell bearbetning av fria former Peter Conradsson MÖBELSNICKERI Carl Malmsten Centrum för Träteknik & Design REG NR: LiU-IEI-TEK-G 07/0025 SE Oktober 2007 Omslagsbild: Stol
Forma komprimerat trä - maskinell bearbetning av fria former Peter Conradsson MÖBELSNICKERI Carl Malmsten Centrum för Träteknik & Design REG NR: LiU-IEI-TEK-G 07/0025 SE Oktober 2007 Omslagsbild: Stol
TentamensKod: Tentamensdatum: 16 januari 2018 Tid: Hjälpmedel:
 Maskinelement 7,5 högskolepoäng Provmoment: Ladokkod: Tentamen ges för: Tentamen 4P09M TGMAI6h TentamensKod: Tentamensdatum: 6 januari 208 Tid: 09.00 3.00 Hjälpmedel: Formelsamling för maskinelement, Tore
Maskinelement 7,5 högskolepoäng Provmoment: Ladokkod: Tentamen ges för: Tentamen 4P09M TGMAI6h TentamensKod: Tentamensdatum: 6 januari 208 Tid: 09.00 3.00 Hjälpmedel: Formelsamling för maskinelement, Tore
Extramaterial till Matematik Y
 LIBER PROGRAMMERING OCH DIGITAL KOMPETENS Extramaterial till Matematik Y NIVÅ TVÅ Geometri ELEV Desmos Geometry är ett matematikverktyg som bland annat kan hjälpa dig att avbilda geometriska figurer och
LIBER PROGRAMMERING OCH DIGITAL KOMPETENS Extramaterial till Matematik Y NIVÅ TVÅ Geometri ELEV Desmos Geometry är ett matematikverktyg som bland annat kan hjälpa dig att avbilda geometriska figurer och
Transformationer i R 2 och R 3
 Linjär algebra, I / Matematiska vetenskaper Inledning Transformationer i R och R 3 Vi skall se på några geometriska transformationer; rotation, skalning, translation och projektion. Rotation och skalning
Linjär algebra, I / Matematiska vetenskaper Inledning Transformationer i R och R 3 Vi skall se på några geometriska transformationer; rotation, skalning, translation och projektion. Rotation och skalning
Tentamen Mekanik F del 2 (FFM521 och 520)
") Tentamen Mekanik F del 2 (FFM521 och 520) Tid och plats: Tisdagen den 27 augusti 2013 klockan 14.00-18.00. Hjälpmedel: Physics Handbook, Beta samt en egenhändigt handskriven A4 med valfritt innehåll (bägge
Tentamen Mekanik F del 2 (FFM521 och 520) Tid och plats: Tisdagen den 27 augusti 2013 klockan 14.00-18.00. Hjälpmedel: Physics Handbook, Beta samt en egenhändigt handskriven A4 med valfritt innehåll (bägge
Laboration i Maskinelement
 Laboration i Maskinelement Bilväxellådan Namn: Personnummer: Assistents signatur: Datum: Inledning I den här laborationen ska vi gå lite djupare i ämnet maskinelement och ge oss in på något som förmodligen
Laboration i Maskinelement Bilväxellådan Namn: Personnummer: Assistents signatur: Datum: Inledning I den här laborationen ska vi gå lite djupare i ämnet maskinelement och ge oss in på något som förmodligen
Viktigt! Glöm inte att skriva Tentamenskod på alla blad du lämnar in.
 Maskinelement 7,5 högskolepoäng Provmoment: Ladokkod: Tentamen ges för: Tentamen 4P09M KMASK4h TentamensKod: Tentamensdatum: 3 mars 207 Tid: 09.00 3.00 Hjälpmedel: Formelsamling för maskinelement, Tore
Maskinelement 7,5 högskolepoäng Provmoment: Ladokkod: Tentamen ges för: Tentamen 4P09M KMASK4h TentamensKod: Tentamensdatum: 3 mars 207 Tid: 09.00 3.00 Hjälpmedel: Formelsamling för maskinelement, Tore
Funktionsmodellering av en lastbilsväxellåda. Björn Calendar Sandegård
 Funktionsmodellering av en lastbilsväxellåda Björn Calendar Sandegård Examensarbete Stockholm, Sverige 2013 Funktionsmodellering av funktion en lastbilsväxellåda Björn Calendar Sandegård Examensarbete
Funktionsmodellering av en lastbilsväxellåda Björn Calendar Sandegård Examensarbete Stockholm, Sverige 2013 Funktionsmodellering av funktion en lastbilsväxellåda Björn Calendar Sandegård Examensarbete
Geometriska transformationer
 CTH/GU LABORATION 5 TMV6/MMGD - 7/8 Matematiska vetenskaper Inledning Geometriska transformationer Vi skall se på några geometriska transformationer; rotation, skalning, translation, spegling och projektion.
CTH/GU LABORATION 5 TMV6/MMGD - 7/8 Matematiska vetenskaper Inledning Geometriska transformationer Vi skall se på några geometriska transformationer; rotation, skalning, translation, spegling och projektion.
Vrid och vänd en rörande historia
 Vrid och vänd en rörande historia Den lilla bilden nederst på s 68 visar en låda. Men vad finns i den? Om man vrider den vänstra pinnen, så rör sig den högra åt sidan. Titta på pilarna! Problemet har mer
Vrid och vänd en rörande historia Den lilla bilden nederst på s 68 visar en låda. Men vad finns i den? Om man vrider den vänstra pinnen, så rör sig den högra åt sidan. Titta på pilarna! Problemet har mer
Planetväxelinnovation
 Planetväxelinnovation En studie i hur omkonstruktion av planetväxlar medför effektivare tillverkning MARIE ALLVAR KATRIN ENGEL VINCENT ÖHRVALL KARLSSON Examensarbete Stockholm, Sverige 2010 2 Planetväxelinnovation
Planetväxelinnovation En studie i hur omkonstruktion av planetväxlar medför effektivare tillverkning MARIE ALLVAR KATRIN ENGEL VINCENT ÖHRVALL KARLSSON Examensarbete Stockholm, Sverige 2010 2 Planetväxelinnovation
Mer om geometriska transformationer
 CTH/GU LABORATION 4 TMV141-1/13 Matematiska vetenskaper 1 Inledning Mer om geometriska transformationer Vi fortsätter med geometriska transformationer och ser på ortogonal (vinkelrät) projektion samt spegling.
CTH/GU LABORATION 4 TMV141-1/13 Matematiska vetenskaper 1 Inledning Mer om geometriska transformationer Vi fortsätter med geometriska transformationer och ser på ortogonal (vinkelrät) projektion samt spegling.
Parabeln och vad man kan ha den till
 Parabeln och vad man kan ha den till Anders Källén MatematikCentrum LTH anderskallen@gmail.com Sammanfattning I det här dokumentet diskuterar vi vad parabeln är för geometrisk konstruktion och varför den
Parabeln och vad man kan ha den till Anders Källén MatematikCentrum LTH anderskallen@gmail.com Sammanfattning I det här dokumentet diskuterar vi vad parabeln är för geometrisk konstruktion och varför den
Tentamen Mekanik F del 2 (FFM520)
") Tentamen Mekanik F del 2 (FFM520) Tid och plats: Lördagen den 1 september 2012 klockan 08.30-12.30 i M. Hjälpmedel: Physics Handbook, Beta, Typgodkänd miniräknare samt en egenhändigt skriven A4 med valfritt
Tentamen Mekanik F del 2 (FFM520) Tid och plats: Lördagen den 1 september 2012 klockan 08.30-12.30 i M. Hjälpmedel: Physics Handbook, Beta, Typgodkänd miniräknare samt en egenhändigt skriven A4 med valfritt
9.2 Kinetik Allmän plan rörelse Ledningar
 9.2 Kinetik Allmän plan rörelse Ledningar 9.43 b) Villkor för att linan inte skall glida ges av ekv (4.1.6). 9.45 Ställ upp grundekvationerna, ekv (9.2.1) + (9.2.4), för trådrullen. I momentekvationen,
9.2 Kinetik Allmän plan rörelse Ledningar 9.43 b) Villkor för att linan inte skall glida ges av ekv (4.1.6). 9.45 Ställ upp grundekvationerna, ekv (9.2.1) + (9.2.4), för trådrullen. I momentekvationen,
Samverkansformer och resultat av FFI HP projekt vid tillverkning av transmissionsdetaljer
 Results of FFI HP projects at a workshop for machining of transmission parts 1 Samverkansformer och resultat av FFI HP projekt vid tillverkning av transmissionsdetaljer Sven Hjelm Mats Bagge Global Industrial
Results of FFI HP projects at a workshop for machining of transmission parts 1 Samverkansformer och resultat av FFI HP projekt vid tillverkning av transmissionsdetaljer Sven Hjelm Mats Bagge Global Industrial
Tentamen i Mekanik II
 Institutionen för fysik och astronomi F1Q1W2 Tentamen i Mekanik II 30 maj 2016 Hjälpmedel: Mathematics Handbook, Physics Handbook och miniräknare. Maximalt 5 poäng per uppgift. För betyg 3 krävs godkänd
Institutionen för fysik och astronomi F1Q1W2 Tentamen i Mekanik II 30 maj 2016 Hjälpmedel: Mathematics Handbook, Physics Handbook och miniräknare. Maximalt 5 poäng per uppgift. För betyg 3 krävs godkänd
TAIU07 Matematiska beräkningar med Matlab
 TAIU07 Matematiska beräkningar med Matlab Laboration 3. Linjär algebra Namn: Personnummer: Epost: Namn: Personnummer: Epost: Godkänd den: Sign: Retur: 1 Introduktion 2 En Komet Kometer rör sig enligt ellipsformade
TAIU07 Matematiska beräkningar med Matlab Laboration 3. Linjär algebra Namn: Personnummer: Epost: Namn: Personnummer: Epost: Godkänd den: Sign: Retur: 1 Introduktion 2 En Komet Kometer rör sig enligt ellipsformade
LAB-PM. Bilväxellåda. Laboration i Maskinelement. / Stig Algstrand
 LAB-PM Laboration i Maskinelement Bilväxellåda / Stig Algstrand Inledning I den här laborationen ska vi gå lite djupare i ämnet maskinelement och ge oss in på något som förmodligen alla har sett i något
LAB-PM Laboration i Maskinelement Bilväxellåda / Stig Algstrand Inledning I den här laborationen ska vi gå lite djupare i ämnet maskinelement och ge oss in på något som förmodligen alla har sett i något
Parabeln och vad man kan ha den till
 Parabeln och vad man kan ha den till Anders Källén MatematikCentrum LTH anderskallen@gmail.com Sammanfattning I den här artikeln diskuterar vi vad parabeln är för geometrisk konstruktion och varför den
Parabeln och vad man kan ha den till Anders Källén MatematikCentrum LTH anderskallen@gmail.com Sammanfattning I den här artikeln diskuterar vi vad parabeln är för geometrisk konstruktion och varför den
LABORATIONSHÄFTE NUMERISKA METODER GRUNDKURS 1, 2D1210 LÄSÅRET 03/04. Laboration 3 3. Torsionssvängningar i en drivaxel
 Lennart Edsberg Nada, KTH December 2003 LABORATIONSHÄFTE NUMERISKA METODER GRUNDKURS 1, 2D1210 M2 LÄSÅRET 03/04 Laboration 3 3. Torsionssvängningar i en drivaxel 1 Laboration 3. Differentialekvationer
Lennart Edsberg Nada, KTH December 2003 LABORATIONSHÄFTE NUMERISKA METODER GRUNDKURS 1, 2D1210 M2 LÄSÅRET 03/04 Laboration 3 3. Torsionssvängningar i en drivaxel 1 Laboration 3. Differentialekvationer
PRODUKTUTVECKLING 3. CAD & 3D-ritning. Erik Almers 2011-01-10
 PRODUKTUTVECKLING 3 CAD & 3D-ritning PM Erik Almers 2011-01-10 Detta fördjupningsarbete handlar om hur man kan använda sig utav 3d-modelering i en produktutvecklingsprocess. Betonar även vikten av 3d-modeleringen
PRODUKTUTVECKLING 3 CAD & 3D-ritning PM Erik Almers 2011-01-10 Detta fördjupningsarbete handlar om hur man kan använda sig utav 3d-modelering i en produktutvecklingsprocess. Betonar även vikten av 3d-modeleringen
Undersökande arbetssätt i matematik 1 och 2
 Matematik Gymnasieskola Modul: Matematikundervisning med digitala verktyg Del 6: Undersökande arbetssätt med matematisk programvara Undersökande arbetssätt i matematik 1 och 2 I texten Undersökande arbetssätt
Matematik Gymnasieskola Modul: Matematikundervisning med digitala verktyg Del 6: Undersökande arbetssätt med matematisk programvara Undersökande arbetssätt i matematik 1 och 2 I texten Undersökande arbetssätt
Extramaterial till Matematik Y
 LIBER PROGRAMMERING OCH DIGITAL KOMPETENS Extramaterial till Matematik Y NIVÅ TRE Geometri ELEV Desmos Geometry är ett matematikverktyg som bland annat kan hjälpa dig att avbilda geometriska figurer och
LIBER PROGRAMMERING OCH DIGITAL KOMPETENS Extramaterial till Matematik Y NIVÅ TRE Geometri ELEV Desmos Geometry är ett matematikverktyg som bland annat kan hjälpa dig att avbilda geometriska figurer och
Tentamen i TMPT 04 Produktionsteknik för Im3
 Tentamen i TMPT 04 Produktionsteknik för Im3 Datum 2014-01-17 kl 14-18 Sal:?? Provkod: TEN A Antal ingående uppgifter: 6 st. Antal sidor: 8 st. Jourh. lärare: Peter Bjurstam Telefon: 013-281173 Besökstider:
Tentamen i TMPT 04 Produktionsteknik för Im3 Datum 2014-01-17 kl 14-18 Sal:?? Provkod: TEN A Antal ingående uppgifter: 6 st. Antal sidor: 8 st. Jourh. lärare: Peter Bjurstam Telefon: 013-281173 Besökstider:
Om ellipsen och hyperbelns optiska egenskaper
 Om ellipsen och hyperbelns optiska egenskaper Anders Källén MatematikCentrum LTH anderskallen@gmail.com Sammanfattning Ellipser och hyperbler är, liksom parabeln, s.k. kägelsnitt, dvs kurvor som uppkommer
Om ellipsen och hyperbelns optiska egenskaper Anders Källén MatematikCentrum LTH anderskallen@gmail.com Sammanfattning Ellipser och hyperbler är, liksom parabeln, s.k. kägelsnitt, dvs kurvor som uppkommer
Kugg- och snäckväxlar Koniska kuggväxlar Avvikelser och mätmetoder
 SIS-Standardiseringskommissionen i Sverige SVENSK STANDARD SS 2060 Standarden utarbetad av Första giltighetsdag Utgåva Sida SMS, SVERIGES MEKANSTANDARDISERING 1978-04-01 2 1 (7 Registering SMS reg 37.955
SIS-Standardiseringskommissionen i Sverige SVENSK STANDARD SS 2060 Standarden utarbetad av Första giltighetsdag Utgåva Sida SMS, SVERIGES MEKANSTANDARDISERING 1978-04-01 2 1 (7 Registering SMS reg 37.955
Transmissionselement Kopplingar
 Transmissionselement Kopplingar 1 Transmission transportera effekt Transmissionselement - Axlar - Kopplingar - Växlar - mm. Val av transmissions element - Typ beroende på önskad funktion - Storlek (dimension)
Transmissionselement Kopplingar 1 Transmission transportera effekt Transmissionselement - Axlar - Kopplingar - Växlar - mm. Val av transmissions element - Typ beroende på önskad funktion - Storlek (dimension)
4.1 Inventering av olika koncept
 1 4.1 Inventering av olika koncept Nedan har vi listat 5 olika koncept som vi har analyserat och jämfört med varandra. Ett av konceptet är Sandviks egna och de andra fyra är tagna ur patentdatabasen esp@cenet
1 4.1 Inventering av olika koncept Nedan har vi listat 5 olika koncept som vi har analyserat och jämfört med varandra. Ett av konceptet är Sandviks egna och de andra fyra är tagna ur patentdatabasen esp@cenet
Beräkningsvetenskap introduktion. Beräkningsvetenskap I
 Beräkningsvetenskap introduktion Beräkningsvetenskap I Kursens mål För godkänt betyg ska studenten kunna redogöra för de nyckelbegreppen som ingår i kursen* utföra enklare analys av beräkningsproblem och
Beräkningsvetenskap introduktion Beräkningsvetenskap I Kursens mål För godkänt betyg ska studenten kunna redogöra för de nyckelbegreppen som ingår i kursen* utföra enklare analys av beräkningsproblem och
Kuggväxelmotorer, 3-fas 200W / 30Nm GGM Motor Co., Ltd. Komponenter för automation. Nordela V19.05
 Kuggväxelmotorer, 3-fas 200W / 30Nm GGM Motor Co., Ltd. Komponenter för automation En kort presentation GGM Co., Ltd. grundat 1979, är beläget i Sydkorea. Man är helt fokuserad på att konstruera och producera
Kuggväxelmotorer, 3-fas 200W / 30Nm GGM Motor Co., Ltd. Komponenter för automation En kort presentation GGM Co., Ltd. grundat 1979, är beläget i Sydkorea. Man är helt fokuserad på att konstruera och producera
Tentamen i: Konstruktionselement. Antal räkneuppgifter: 5 Datum: Examinator: Hans Johansson Skrivtid:
 KARLSTADS UNIVERSITET akulteten för teknik- och naturvetenskap Tentamen i: Konstruktionselement Kod: MSGB10 Antal kortsvarsfrågor: 20 Antal räkneuppgifter: 5 Datum: 2008-01-14 Examinator: Hans Johansson
KARLSTADS UNIVERSITET akulteten för teknik- och naturvetenskap Tentamen i: Konstruktionselement Kod: MSGB10 Antal kortsvarsfrågor: 20 Antal räkneuppgifter: 5 Datum: 2008-01-14 Examinator: Hans Johansson
40 poäng. Allmänna anvisningar: Uppgifterna är av varierande svårighetsgrad. Varje uppgift kan ge upp till 5 poäng.
 Maskinelement Provmoment: Tentamen Ladokkod: 41P09M Tentamen ges för: KMASK13h 7,5 högskolepoäng Namn: (Ifylles av student) Personnummer: (Ifylles av student) Tentamensdatum: 15 januari 2015 Tid: 09.00
Maskinelement Provmoment: Tentamen Ladokkod: 41P09M Tentamen ges för: KMASK13h 7,5 högskolepoäng Namn: (Ifylles av student) Personnummer: (Ifylles av student) Tentamensdatum: 15 januari 2015 Tid: 09.00
Karta över Jorden - viktigt exempel. Sfär i (x, y, z) koordinater Funktionen som beskriver detta ser ut till att vara
 koordinater Funktionen som beskriver detta ser ut till att vara") Föreläsning 1 Jag hettar Thomas Kragh och detta är kursen: Flervariabelanalys 1MA016/1MA183. E-post: thomas.kragh@math.uu.se Kursplan finns i studentportalens hemsida för denna kurs. Där är två spår: Spår
Föreläsning 1 Jag hettar Thomas Kragh och detta är kursen: Flervariabelanalys 1MA016/1MA183. E-post: thomas.kragh@math.uu.se Kursplan finns i studentportalens hemsida för denna kurs. Där är två spår: Spår
Hjälpmedel: Tore Dahlbergs formelsamling, TeFyMa eller någon annan liknande fysik- eller matematikformelsamling, valfri miniräknare, linjal, passare
 Mekaniska konstruktioner Provmoment: Tentamen Ladokkod: 41I30M Tentamen ges för: Af-ma3, Htep2 7,5 högskolepoäng Namn: (Ifylles av student) Personnummer: (Ifylles av student) Tentamensdatum: 12 januari
Mekaniska konstruktioner Provmoment: Tentamen Ladokkod: 41I30M Tentamen ges för: Af-ma3, Htep2 7,5 högskolepoäng Namn: (Ifylles av student) Personnummer: (Ifylles av student) Tentamensdatum: 12 januari
Sammanfattning. Max vikt: 800 kg. Hytten skall vara dämpad. 360 synfält. Det skall vara möjligt att värma och kyla mat.
 Skotare Teknisk rapport - Hytt Fredrik Berglund MF2011 Systemkonstruktion Skolan för Industriell Teknik och Management Kursansvarig: Ulf Sellgren Februari 2009 Sammanfattning Till skotarkonceptet som arbetades
Skotare Teknisk rapport - Hytt Fredrik Berglund MF2011 Systemkonstruktion Skolan för Industriell Teknik och Management Kursansvarig: Ulf Sellgren Februari 2009 Sammanfattning Till skotarkonceptet som arbetades
Ellipsen. 1. Apollonius och ellipsen som kägelsnitt.
 Ellipsen 1. Apollonius och ellipsen som kägelsnitt. Vi skall stifta bekantskap med, och ganska noga undersöka, den plana kurva som kallas ellips. Man kan närma sig kurvan på olika sätt men vi väljer som
Ellipsen 1. Apollonius och ellipsen som kägelsnitt. Vi skall stifta bekantskap med, och ganska noga undersöka, den plana kurva som kallas ellips. Man kan närma sig kurvan på olika sätt men vi väljer som
Gemensamt projekt: Matematik, Beräkningsvetenskap, Elektromagnetism. Inledning. Fysikalisk bakgrund
 Gemensamt projekt: Matematik, Beräkningsvetenskap, Elektromagnetism En civilingenjör ska kunna idealisera ett givet verkligt problem, göra en adekvat fysikalisk modell och behandla modellen med matematiska
Gemensamt projekt: Matematik, Beräkningsvetenskap, Elektromagnetism En civilingenjör ska kunna idealisera ett givet verkligt problem, göra en adekvat fysikalisk modell och behandla modellen med matematiska
Lösningar till utvalda uppgifter i kapitel 1
 Lösningar till utvalda uppgifter i kapitel. Vi utnyttjar definitionen av skalärprodukt som ger att u v u v, där α är (minsta) vinkeln mellan u v. I vårt fall så får vi 7 =. Alltså är den sökta vinkeln
Lösningar till utvalda uppgifter i kapitel. Vi utnyttjar definitionen av skalärprodukt som ger att u v u v, där α är (minsta) vinkeln mellan u v. I vårt fall så får vi 7 =. Alltså är den sökta vinkeln
Magnetiska fält laboration 1FA514 Elektimagnetism I
 Magnetiska fält laboration 1FA514 Elektimagnetism I Utförs av: William Sjöström 19940404 6956 Oskar Keskitalo 19941021 4895 Uppsala 2015 05 09 Sammanfattning När man leder ström genom en spole så bildas
Magnetiska fält laboration 1FA514 Elektimagnetism I Utförs av: William Sjöström 19940404 6956 Oskar Keskitalo 19941021 4895 Uppsala 2015 05 09 Sammanfattning När man leder ström genom en spole så bildas
Rumsuppfattning är förmågan att behandla sinnesintryck av former
 Güner Ahmet & Thomas Lingefjärd Tredimensionellt tänkande Tredimensionella matematiska representationer är inte särskilt vanliga i skolans matematikkurser, med undantag för kurs 3 5 i gymnasiet. Varför
Güner Ahmet & Thomas Lingefjärd Tredimensionellt tänkande Tredimensionella matematiska representationer är inte särskilt vanliga i skolans matematikkurser, med undantag för kurs 3 5 i gymnasiet. Varför
Homogena koordinater och datorgrafik
 Linjär algebra, AT3 2011/2012 Matematiska vetenskaper Inledning Homogena koordinater och datorgrafik Vi såg tidigare på några geometriska transformationer; rotation, skalning, translation och projektion.
Linjär algebra, AT3 2011/2012 Matematiska vetenskaper Inledning Homogena koordinater och datorgrafik Vi såg tidigare på några geometriska transformationer; rotation, skalning, translation och projektion.
Mekanik III, 1FA103. 1juni2015. Lisa Freyhult 471 3297
 Mekanik III, 1FA103 1juni2015 Lisa Freyhult 471 3297 Instruktioner: Börja varje uppgift på nytt blad. Skriv kod på varje blad du lämnar in. Definiera införda beteckningar i text eller figur. Motivera uppställda
Mekanik III, 1FA103 1juni2015 Lisa Freyhult 471 3297 Instruktioner: Börja varje uppgift på nytt blad. Skriv kod på varje blad du lämnar in. Definiera införda beteckningar i text eller figur. Motivera uppställda
Rättningstiden är i normalfall tre veckor, annars är det detta datum som gäller:
 Mekaniska konstruktioner Provmoment: Tentamen Ladokkod: TM011A Tentamen ges för: Bt3, Af-ma1, Htep2 7,5 högskolepoäng Namn: (Ifylles av student) Personnummer: (Ifylles av student) Tentamensdatum: 15 mars
Mekaniska konstruktioner Provmoment: Tentamen Ladokkod: TM011A Tentamen ges för: Bt3, Af-ma1, Htep2 7,5 högskolepoäng Namn: (Ifylles av student) Personnummer: (Ifylles av student) Tentamensdatum: 15 mars
Träff 1 Skissa & Extrudera
 Skapa en folder Jag rekommenderar att samla filer och övningar i en egen folder som man har full kontroll på. Muff-foldern som vi delar är tänkt som en gemensam övningsyta. Innehåll som du vill komma åt
Skapa en folder Jag rekommenderar att samla filer och övningar i en egen folder som man har full kontroll på. Muff-foldern som vi delar är tänkt som en gemensam övningsyta. Innehåll som du vill komma åt
Bromsar Remväxlar. Broms förhindrar rörelse - koppling överför rörelse
 Bromsar Remväxlar 1 Broms förhindrar rörelse - koppling överför rörelse Funktion - Bromsa (retardera) rörelse Stoppbroms - Hålla rörelse vid konstant hastighet Reglerbroms - Hålla fast i stillastående
Bromsar Remväxlar 1 Broms förhindrar rörelse - koppling överför rörelse Funktion - Bromsa (retardera) rörelse Stoppbroms - Hålla rörelse vid konstant hastighet Reglerbroms - Hålla fast i stillastående
4.2 Fastställ en referenslösning... 6 4.2.1 Kundvärde... 6
 Inlämning 4 IKOT Inlämningsuppgift 4 Anders Segerlund andseg@student.chalmers.se Joakim Larsson joakiml@student.chalmers.se Toni Hastenpflug tonih@student.chalmers.se Fredrik Danielsson fredani@student.chalmers.se
Inlämning 4 IKOT Inlämningsuppgift 4 Anders Segerlund andseg@student.chalmers.se Joakim Larsson joakiml@student.chalmers.se Toni Hastenpflug tonih@student.chalmers.se Fredrik Danielsson fredani@student.chalmers.se
Sfäriska axialrullager
 Sfäriska axialrullager Utföranden... 878 Utförande SKF Explorer... 878 Lagerdata allmänt... 879 Mått... 879 Toleranser... 879 Snedställning... 879 Driftstemperaturens inverkan på lagermaterial... 879 Minsta
Sfäriska axialrullager Utföranden... 878 Utförande SKF Explorer... 878 Lagerdata allmänt... 879 Mått... 879 Toleranser... 879 Snedställning... 879 Driftstemperaturens inverkan på lagermaterial... 879 Minsta
Vi har väl alla stått på en matta på golvet och sedan hastigt försökt förflytta
 Niclas Larson Myra på villovägar Att modellera praktiska sammanhang i termer av matematik och att kunna använda olika representationer och se samband mellan dessa är grundläggande förmågor som behövs vid
Niclas Larson Myra på villovägar Att modellera praktiska sammanhang i termer av matematik och att kunna använda olika representationer och se samband mellan dessa är grundläggande förmågor som behövs vid
Mer om analytisk geometri
 1 Onsdag v 5 Mer om analytisk geometri Determinanter: Då man har en -matris kan man till den associera ett tal determinanten av som också skrivs Determinanter kommer att repeteras och studeras närmare
1 Onsdag v 5 Mer om analytisk geometri Determinanter: Då man har en -matris kan man till den associera ett tal determinanten av som också skrivs Determinanter kommer att repeteras och studeras närmare
SF1669 Matematisk och numerisk analys II Bedömningskriterier till tentamen Torsdagen den 4 juni 2015
 SF1669 Matematisk och numerisk analys II Bedömningskriterier till tentamen Torsdagen den 4 juni 2015 Allmänt gäller följande: För full poäng på en uppgift krävs att lösningen är väl presenterad och lätt
SF1669 Matematisk och numerisk analys II Bedömningskriterier till tentamen Torsdagen den 4 juni 2015 Allmänt gäller följande: För full poäng på en uppgift krävs att lösningen är väl presenterad och lätt
Repetion. Jonas Björnsson. 1. Lyft ut den/de intressanta kopp/kropparna från den verkliga världen
 Repetion Jonas Björnsson Sammanfattning Detta är en kort sammanfattning av kursen Mekanik. Friläggning Friläggning består kortfattat av följande moment 1. Lyft ut den/de intressanta kopp/kropparna från
Repetion Jonas Björnsson Sammanfattning Detta är en kort sammanfattning av kursen Mekanik. Friläggning Friläggning består kortfattat av följande moment 1. Lyft ut den/de intressanta kopp/kropparna från
formulera och lösa problem med hjälp av matematik samt värdera valda strategier och metoder,
 Arbetsområde: Huvudsakligt ämne: Matematik, åk 4-6 Läsår: Tidsomfattning: Ämnets syfte Undervisning i ämnet matematik syftar till: länk Följande syftesförmågor för ämnet ska utvecklas: formulera och lösa
Arbetsområde: Huvudsakligt ämne: Matematik, åk 4-6 Läsår: Tidsomfattning: Ämnets syfte Undervisning i ämnet matematik syftar till: länk Följande syftesförmågor för ämnet ska utvecklas: formulera och lösa
SF1624 Algebra och geometri
 SF1624 Algebra och geometri Föreläsning 2 David Rydh Institutionen för matematik KTH 28 augusti 2018 Detta gjorde vi igår Punkter Vektorer och skalärer, multiplikation med skalär Linjärkombinationer, spannet
SF1624 Algebra och geometri Föreläsning 2 David Rydh Institutionen för matematik KTH 28 augusti 2018 Detta gjorde vi igår Punkter Vektorer och skalärer, multiplikation med skalär Linjärkombinationer, spannet
Joakim Vasilevski 2011-01-16
 PM - CAM KPP039 Produktutveckling 3 2011-01-16 Examinator: Rolf Lövgren Mälardalens Högskola Förord I kursen KPP039 Produktutveckling 3 har vi i uppgift skriva ett inviduellt PM om ett lämpligt ämne i
PM - CAM KPP039 Produktutveckling 3 2011-01-16 Examinator: Rolf Lövgren Mälardalens Högskola Förord I kursen KPP039 Produktutveckling 3 har vi i uppgift skriva ett inviduellt PM om ett lämpligt ämne i
Övningar för finalister i Wallenbergs fysikpris
 Övningar för finalister i Wallenbergs fysikpris 0 mars 05 Läsa tegelstensböcker i all ära, men inlärning sker som mest effektivt genom att själv öva på att lösa problem. Du kanske har upplevt under gymnasiet
Övningar för finalister i Wallenbergs fysikpris 0 mars 05 Läsa tegelstensböcker i all ära, men inlärning sker som mest effektivt genom att själv öva på att lösa problem. Du kanske har upplevt under gymnasiet
Systemkonstruktion Z3
 Systemkonstruktion Z3 (Kurs nr: SSY 046) Tentamen 22 oktober 2010 Lösningsförslag 1 Skriv en kravspecifikation för konstruktionen! Kravspecifikationen ska innehålla information kring fordonets prestanda
Systemkonstruktion Z3 (Kurs nr: SSY 046) Tentamen 22 oktober 2010 Lösningsförslag 1 Skriv en kravspecifikation för konstruktionen! Kravspecifikationen ska innehålla information kring fordonets prestanda
LINJÄRA AVBILDNINGAR
 LINJÄRA AVBILDNINGAR Xantcha november 05 Linjära avbildningar Definition Definition En avbildning T : R Ñ R (eller R Ñ R ) är linjär om T pau ` bvq at puq ` bt pvq för alla vektorer u, v P R (eller u,
LINJÄRA AVBILDNINGAR Xantcha november 05 Linjära avbildningar Definition Definition En avbildning T : R Ñ R (eller R Ñ R ) är linjär om T pau ` bvq at puq ` bt pvq för alla vektorer u, v P R (eller u,
Prov Fysik 2 Mekanik
 Prov Fysik 2 Mekanik Instruktion för elevbedömning: Efter varje fråga finns tre rutor. Rutan till vänster ska ha en lösning på E-nivå. Om det går att göra en lösning som är klart bättre - på C-nivå - då
Prov Fysik 2 Mekanik Instruktion för elevbedömning: Efter varje fråga finns tre rutor. Rutan till vänster ska ha en lösning på E-nivå. Om det går att göra en lösning som är klart bättre - på C-nivå - då
Tentamen Mekanik F del 2 (FFM520)
") Tentamen Mekanik F del 2 (FFM520) Tid och plats: Måndagen den 23 maj 2011 klockan 14.00-18.00 i V. Hjälpmedel: Physics Handbook, Beta, Lexikon, typgodkänd miniräknare samt en egenhändigt skriven A4 med
Tentamen Mekanik F del 2 (FFM520) Tid och plats: Måndagen den 23 maj 2011 klockan 14.00-18.00 i V. Hjälpmedel: Physics Handbook, Beta, Lexikon, typgodkänd miniräknare samt en egenhändigt skriven A4 med
Planetväxelns funktion i Toyota Prius. Olof Karlsson Tommy Robertson
 Planetväxelns funktion i Toyota Prius Olof Karlsson Tommy Robertson Kandidatarbete Stockholm 2008 0 Planetväxelns funktion i Toyota Prius av Olof Karlsson Tommy Robertson Kandidatarbete MMKB 2008:2 MKNB
Planetväxelns funktion i Toyota Prius Olof Karlsson Tommy Robertson Kandidatarbete Stockholm 2008 0 Planetväxelns funktion i Toyota Prius av Olof Karlsson Tommy Robertson Kandidatarbete MMKB 2008:2 MKNB
4-8 Cirklar. Inledning
 Namn: 4-8 Cirklar Inledning Du har arbetat med fyrhörningar (parallellogrammer) och trehörningar (trianglar). Nu skall du studera en figur som saknar hörn, och som består av en böjd linje. Den kallas för
Namn: 4-8 Cirklar Inledning Du har arbetat med fyrhörningar (parallellogrammer) och trehörningar (trianglar). Nu skall du studera en figur som saknar hörn, och som består av en böjd linje. Den kallas för
Läsanvisningar till kapitel 4 i Naturlig matematik
 Läsanvisningar till kapitel 4 i Naturlig matematik Avsnitt 4.1 I kapitel 4 kommer du att möta de elementära funktionerna. Dessa är helt enkelt de vanligaste funktionerna som vi normalt arbetar med. Här
Läsanvisningar till kapitel 4 i Naturlig matematik Avsnitt 4.1 I kapitel 4 kommer du att möta de elementära funktionerna. Dessa är helt enkelt de vanligaste funktionerna som vi normalt arbetar med. Här
P Q = ( 2, 1, 1), P R = (0, 1, 0) och QR = (2, 2, 1). arean = 1 2 P Q P R
, P R = (0, 1, 0) och QR = (2, 2, 1). arean = 1 2 P Q P R") 1 Matematiska Institutionen KTH Lösningar till några övningar på geometri och vektorer inför lappskrivning nummer 2 på kursen Linjär algebra II, SF1604, vt11. 1. En triangel har hörn i punkterna (1, 2,
1 Matematiska Institutionen KTH Lösningar till några övningar på geometri och vektorer inför lappskrivning nummer 2 på kursen Linjär algebra II, SF1604, vt11. 1. En triangel har hörn i punkterna (1, 2,
Optimala vinkeln av bortklippt cirkelsektor fo r maximal volym pa glasstrut
 Optimala vinkeln av bortklippt cirkelsektor fo r maximal volym pa glasstrut Frågeställning Av en cirkulär pappersskiva kan en cirkelsektor med en viss vinkel klippas bort. Med den resterande sektorn går
Optimala vinkeln av bortklippt cirkelsektor fo r maximal volym pa glasstrut Frågeställning Av en cirkulär pappersskiva kan en cirkelsektor med en viss vinkel klippas bort. Med den resterande sektorn går
Lösning. (1b) θ 2 = L R. Utgå nu från. α= d2 θ. dt 2 (2)
 θ 2 = L R. Utgå nu från. α= d2 θ. dt 2 (2)") Lösningar till dugga för kursen Mekanik II, FA02, GyLärFys, KandFys, F, Q, W, ES Tekn-Nat Fak, Uppsala Universitet Tid: 7 april 2009, kl 4.00 7.00. Plats: Skrivsalen, Polacksbacken, Uppsala. Tillåtna hjälpmedel:
Lösningar till dugga för kursen Mekanik II, FA02, GyLärFys, KandFys, F, Q, W, ES Tekn-Nat Fak, Uppsala Universitet Tid: 7 april 2009, kl 4.00 7.00. Plats: Skrivsalen, Polacksbacken, Uppsala. Tillåtna hjälpmedel:
= 1 E {σ ν(σ +σ z x y. )} + α T. ε y. ε z. = τ yz G och γ = τ zx. = τ xy G. γ xy. γ yz
} + α T. ε y. ε z. = τ yz G och γ = τ zx. = τ xy G. γ xy. γ yz") Tekniska Högskolan i Linköping, IKP /Tore Dahlberg LÖSNINGAR TENTAMEN i Hållfasthetslära - Dimensioneringmetoder, TMHL09, 060601 kl -12 DEL 1 - (Teoridel utan hjälpmedel) 1. Spänningarna i en punkt i ett
Tekniska Högskolan i Linköping, IKP /Tore Dahlberg LÖSNINGAR TENTAMEN i Hållfasthetslära - Dimensioneringmetoder, TMHL09, 060601 kl -12 DEL 1 - (Teoridel utan hjälpmedel) 1. Spänningarna i en punkt i ett
CAD. Ämnets syfte. Kurser i ämnet
 CAD Ämnet cad (computer aided design) behandlar hur man använder olika programvaror för att konstruera och designa verkliga och virtuella objekt. I ämnet är geometri grunden för att, via skiss och ritteknik,
CAD Ämnet cad (computer aided design) behandlar hur man använder olika programvaror för att konstruera och designa verkliga och virtuella objekt. I ämnet är geometri grunden för att, via skiss och ritteknik,
Föreläsning 5: Acceleration och tidsderivering (kap ) . Sambandet mellan olika punkters hastigheter i en stel kropp: v A
 . Sambandet mellan olika punkters hastigheter i en stel kropp: v A") 1 Föreläsning 5: Acceleration och tidsderivering (kap 212-215) Komihåg 4: Vinkelhastighetsvektorn " = # e z Skillnadsvektorn mellan två punkter i stel kropp kan bara vrida sig: r BA = " # r BA Sambandet
1 Föreläsning 5: Acceleration och tidsderivering (kap 212-215) Komihåg 4: Vinkelhastighetsvektorn " = # e z Skillnadsvektorn mellan två punkter i stel kropp kan bara vrida sig: r BA = " # r BA Sambandet
Vektorgeometri för gymnasister
 Vektorgeometri för gymnasister Per-Anders Svensson http://homepage.lnu.se/staff/psvmsi/vektorgeometri/gymnasiet.html Fakulteten för teknik Linnéuniversitetet Linjära avbildningar II Innehåll Repetition:
Vektorgeometri för gymnasister Per-Anders Svensson http://homepage.lnu.se/staff/psvmsi/vektorgeometri/gymnasiet.html Fakulteten för teknik Linnéuniversitetet Linjära avbildningar II Innehåll Repetition:
Parametriserade kurvor
 CTH/GU LABORATION 4 TMV37-4/5 Matematiska vetenskaper Inledning Parametriserade kurvor Vi skall se hur man ritar parametriserade kurvor i planet samt hur man ritar tangenter och normaler i punkter längs
CTH/GU LABORATION 4 TMV37-4/5 Matematiska vetenskaper Inledning Parametriserade kurvor Vi skall se hur man ritar parametriserade kurvor i planet samt hur man ritar tangenter och normaler i punkter längs
Broschyr 1006 Utgåva Remmar och skivor JENS S. Eagle kuggremsdrifter. En starkare rem med lägre ljudnivå
 Remmar och skivor Broschyr 1006 Utgåva 2006.05 JENS S. Eagle kuggremsdrifter En starkare rem med lägre ljudnivå Innehåll Del 1 Slutna remmar för kraftöverföring (Svarta) Konstruktion egenskaper... 2 mensionering...
Remmar och skivor Broschyr 1006 Utgåva 2006.05 JENS S. Eagle kuggremsdrifter En starkare rem med lägre ljudnivå Innehåll Del 1 Slutna remmar för kraftöverföring (Svarta) Konstruktion egenskaper... 2 mensionering...
kl Tentaupplägg
 Tentaupplägg TIPS 1: Läs igenom ALLA uppgifterna. Välj den du känner är lättast först. Det kan gärna ta 10-20 minuter. Försök skriva saker som kan vara problem i uppgifterna. Är det något du absolut kommer
Tentaupplägg TIPS 1: Läs igenom ALLA uppgifterna. Välj den du känner är lättast först. Det kan gärna ta 10-20 minuter. Försök skriva saker som kan vara problem i uppgifterna. Är det något du absolut kommer
Tentamen Mekanik F del 2 (FFM520)
") Tentamen Mekanik F del 2 (FFM520) Tid och plats: Lördagen den 7 januari 2012 klockan 08.30-12.30 i V. Hjälpmedel: Physics Handbook, Beta, Lexikon, typgodkänd miniräknare samt en egenhändigt skriven A4
Tentamen Mekanik F del 2 (FFM520) Tid och plats: Lördagen den 7 januari 2012 klockan 08.30-12.30 i V. Hjälpmedel: Physics Handbook, Beta, Lexikon, typgodkänd miniräknare samt en egenhändigt skriven A4
Approximation av funktioner
 Vetenskapliga beräkningar III 8 Kapitel Approximation av funktioner Vi skall nu övergå till att beskriva, hur man i praktiken numeriskt beräknar funktioner I allmänhet kan inte ens elementära funktioner
Vetenskapliga beräkningar III 8 Kapitel Approximation av funktioner Vi skall nu övergå till att beskriva, hur man i praktiken numeriskt beräknar funktioner I allmänhet kan inte ens elementära funktioner
CAD. Ämnets syfte. Kurser i ämnet
 CAD Ämnet cad (computer aided design) behandlar hur man använder olika programvaror för att konstruera och designa verkliga och virtuella objekt. I ämnet är geometri grunden för att, via skiss och ritteknik,
CAD Ämnet cad (computer aided design) behandlar hur man använder olika programvaror för att konstruera och designa verkliga och virtuella objekt. I ämnet är geometri grunden för att, via skiss och ritteknik,
Stelkroppsmekanik partiklar med fixa positioner relativt varandra
 Stelkroppsmekanik partiklar med fixa positioner relativt varandra Rörelse relativt mass centrum Allmänt partikelsystem Stel kropp translation + rotation (cirkelrörelse) För att kunna beskriva och förstå
Stelkroppsmekanik partiklar med fixa positioner relativt varandra Rörelse relativt mass centrum Allmänt partikelsystem Stel kropp translation + rotation (cirkelrörelse) För att kunna beskriva och förstå
Övningshäfte 2: Komplexa tal
 LMA100 VT007 ARITMETIK OCH ALGEBRA DEL Övningshäfte : Komplexa tal Övningens syfte är att bekanta sig med komplexa tal. De komplexa talen, som är en utvidgning av de reella talen, kom till på 1400 talet
LMA100 VT007 ARITMETIK OCH ALGEBRA DEL Övningshäfte : Komplexa tal Övningens syfte är att bekanta sig med komplexa tal. De komplexa talen, som är en utvidgning av de reella talen, kom till på 1400 talet
Tentamen TNM061, 3D-grafik och animering för MT2. Onsdag 20/ kl SP71. Inga hjälpmedel
 Tentamen TNM061, 3D-grafik och animering för MT2 Onsdag 20/8 2014 kl 14-18 SP71 Inga hjälpmedel Tentamen innehåller 7 uppgifter, vilka tillsammans kan ge maximalt 50 poäng. För betyg G (registreras som
Tentamen TNM061, 3D-grafik och animering för MT2 Onsdag 20/8 2014 kl 14-18 SP71 Inga hjälpmedel Tentamen innehåller 7 uppgifter, vilka tillsammans kan ge maximalt 50 poäng. För betyg G (registreras som
Roterande obalans Kritiskt varvtal för roterande axlar
 Roterande obalans Kritiskt varvtal för roterande axlar Rotation, krit. varvtal, s 1 m 0 Roterande obalans e Modeller för roterande maskiner ej fullständigt utbalanserade t ex tvättmaskiner, motorer, verkstadsmaskiner
Roterande obalans Kritiskt varvtal för roterande axlar Rotation, krit. varvtal, s 1 m 0 Roterande obalans e Modeller för roterande maskiner ej fullständigt utbalanserade t ex tvättmaskiner, motorer, verkstadsmaskiner
Konvexa höljet Laboration 6 GruDat, DD1344
 Konvexa höljet Laboration 6 GruDat, DD1344 Örjan Ekeberg 10 december 2008 Målsättning Denna laboration ska ge dig övning i att implementera en algoritm utgående från en beskrivning av algoritmen. Du ska
Konvexa höljet Laboration 6 GruDat, DD1344 Örjan Ekeberg 10 december 2008 Målsättning Denna laboration ska ge dig övning i att implementera en algoritm utgående från en beskrivning av algoritmen. Du ska
Mekanik Föreläsning 8
 Mekanik Föreläsning 8 CBGA02, FYGA03, FYGA07 Jens Fjelstad 2010 02 19 1 / 16 Repetition Polära koordinater (r, θ): ange punkter i R 2 m h a r: avståndet från origo (0, 0) θ: vinkeln mot positiva x axeln
Mekanik Föreläsning 8 CBGA02, FYGA03, FYGA07 Jens Fjelstad 2010 02 19 1 / 16 Repetition Polära koordinater (r, θ): ange punkter i R 2 m h a r: avståndet från origo (0, 0) θ: vinkeln mot positiva x axeln
DFA Design For Assembly
 2009 DFA Design For Assembly Seminarium I kurs KPP017 på MDH DFA är en metod inom produktutveckling som används för att få fram ett bra system för montering av nya produkter (kan även användas på befintliga
2009 DFA Design For Assembly Seminarium I kurs KPP017 på MDH DFA är en metod inom produktutveckling som används för att få fram ett bra system för montering av nya produkter (kan även användas på befintliga
Mönster. Ulf Cederling Växjö University Ulf.Cederling@msi.vxu.se http://www.msi.vxu.se/~ulfce. Slide 1
 Mönster Ulf Cederling Växjö University UlfCederling@msivxuse http://wwwmsivxuse/~ulfce Slide 1 Beskrivningsmall Beskrivningsmallen är inspirerad av den som användes på AG Communication Systems (AGCS) Linda
Mönster Ulf Cederling Växjö University UlfCederling@msivxuse http://wwwmsivxuse/~ulfce Slide 1 Beskrivningsmall Beskrivningsmallen är inspirerad av den som användes på AG Communication Systems (AGCS) Linda
ENKEL Teknik 14. Enkla maskiner. Art nr 517
 14 Enkla maskiner Enkla maskiner, eller som man ibland säger, enkla mekanismer, hör till de allra tidigaste tekniska uppfinningarna som människan känner till. Kilen Enkla maskiner har varit kända ända
14 Enkla maskiner Enkla maskiner, eller som man ibland säger, enkla mekanismer, hör till de allra tidigaste tekniska uppfinningarna som människan känner till. Kilen Enkla maskiner har varit kända ända
LättUHS Rapport 5. Trycksvarvning av ultrahöghållfasta stål. Boel Wadman, Swerea IVF
 LättUHS Rapport 5 Trycksvarvning av ultrahöghållfasta stål Boel Wadman, Swerea IVF Sida 1 (9) Trycksvarvning av UHS-material Summary Tests have been made to form components in high strength steel using
LättUHS Rapport 5 Trycksvarvning av ultrahöghållfasta stål Boel Wadman, Swerea IVF Sida 1 (9) Trycksvarvning av UHS-material Summary Tests have been made to form components in high strength steel using
Rullningslager. Tätningar Ytterring. Hållare. Innerring. Rullkroppar
 Rullningslager 1 Hållare Tätningar Ytterring Rullkroppar Innerring 2 Rullkropp - Kulor (Kullager) - Rullar (Rullager) Cylindriska Koniska Bomberade (sfäriska) Toroid (CARB) - Nålrullar (Nålrullager) Belastningsriktning
Rullningslager 1 Hållare Tätningar Ytterring Rullkroppar Innerring 2 Rullkropp - Kulor (Kullager) - Rullar (Rullager) Cylindriska Koniska Bomberade (sfäriska) Toroid (CARB) - Nålrullar (Nålrullager) Belastningsriktning
Introduktion. Torsionspendel
 Chalmers Tekniska Högskola och Göteborgs Universitet November 00 Fysik och teknisk fysik Kristian Gustafsson och Maj Hanson (Anpassat för I1 av Göran Niklasson) Svängningar Introduktion I mekanikkursen
Chalmers Tekniska Högskola och Göteborgs Universitet November 00 Fysik och teknisk fysik Kristian Gustafsson och Maj Hanson (Anpassat för I1 av Göran Niklasson) Svängningar Introduktion I mekanikkursen
Analys o Linjär algebra. Lektion 7.. p.1/65
 Analys o Lektion 7 p1/65 Har redan (i matlab bla) stött på tal-listor eller vektorer av typen etc Vad kan sådana tänkas representera/modellera? Hur kan man räkna med sådana? Skall närmast fokusera på ordnade
Analys o Lektion 7 p1/65 Har redan (i matlab bla) stött på tal-listor eller vektorer av typen etc Vad kan sådana tänkas representera/modellera? Hur kan man räkna med sådana? Skall närmast fokusera på ordnade
Bronsbussning COB098F fläns DIN 1494
 Produkter Lager Glidlager och Bussningar Brons Bronsbussning COB098F fläns DIN 1494 Bronsbussning försedd med genomgående hål Större lagringskapacitet av smörjmedel som tillåter längre smörjintervaller
Produkter Lager Glidlager och Bussningar Brons Bronsbussning COB098F fläns DIN 1494 Bronsbussning försedd med genomgående hål Större lagringskapacitet av smörjmedel som tillåter längre smörjintervaller
Inlämning etapp 7b IKOT 2011. Grupp B5. INNEHÅLL Inlämning av etapp 7b IKOT 2011-04-17. André Liljegren Martin Johansson Katrin Wahlström
 Inlämning etapp 7b IKOT 2011 Grupp B5 INNEHÅLL Inlämning av etapp 7b IKOT 2011-04-17 Louise Fransson Helena Hellerqvist André Liljegren Martin Johansson Katrin Wahlström Handledare: Joakim Johansson Innehåll
Inlämning etapp 7b IKOT 2011 Grupp B5 INNEHÅLL Inlämning av etapp 7b IKOT 2011-04-17 Louise Fransson Helena Hellerqvist André Liljegren Martin Johansson Katrin Wahlström Handledare: Joakim Johansson Innehåll
Kuggväxelmotorer, 3-fas GGM - Gugje Geared Motor Co., Ltd. Komponenter för automation. Nordela V13.06
 Kuggväxelmotorer, 3-fas GGM - Gugje Geared Motor Co., Ltd. Komponenter för automation En kort presentation GGM Co., Ltd. grundat 1979, är beläget i Sydkorea. Man är helt fokuserad på att konstruera och
Kuggväxelmotorer, 3-fas GGM - Gugje Geared Motor Co., Ltd. Komponenter för automation En kort presentation GGM Co., Ltd. grundat 1979, är beläget i Sydkorea. Man är helt fokuserad på att konstruera och
Banach-Tarskis paradox
 Banach-Tarskis paradox Tony Johansson 1MA239: Specialkurs i Matematik II Uppsala Universitet VT 2018 Banach-Tarskis paradox, bevisad 1924 och döpt efter Stefan Banach och Alfred Tarski, är en sats inom
Banach-Tarskis paradox Tony Johansson 1MA239: Specialkurs i Matematik II Uppsala Universitet VT 2018 Banach-Tarskis paradox, bevisad 1924 och döpt efter Stefan Banach och Alfred Tarski, är en sats inom
ETP-EXPRESS För snabb montering och kompakt inbyggnad. ETP-EXPRESS R Rostfritt. ETP-EXPRESS C Nickelbelagd
 Översikt... ETP-EXPRESS För snabb montering och kompakt inbyggnad ETP-EXPRESS R Rostfritt Ytterst snabb montering/demontering med endast EN skruv. Radiell åtkomst av skruven, spar plats längs axeln. Ytterst
Översikt... ETP-EXPRESS För snabb montering och kompakt inbyggnad ETP-EXPRESS R Rostfritt Ytterst snabb montering/demontering med endast EN skruv. Radiell åtkomst av skruven, spar plats längs axeln. Ytterst
SF1626 Flervariabelanalys
 Föreläsning 3 Institutionen för matematik KTH VT 2018 Previously on Flervariabel 1 Analytisk geometri i R n, kap 10 1. Topologiska begrepp a. Omgivning b. Randpunkter, Inre punkter c. Öppen mängd, Sluten
Föreläsning 3 Institutionen för matematik KTH VT 2018 Previously on Flervariabel 1 Analytisk geometri i R n, kap 10 1. Topologiska begrepp a. Omgivning b. Randpunkter, Inre punkter c. Öppen mängd, Sluten
Bemästra verktyget TriBall
 Bemästra verktyget TriBall I IRONCAD finns ett patenterat verktyg för 3D-positionering av objekt, kallat TriBall. Hyllad av en del som "Det mest användbara verktyget i CAD-historien" TriBall är otroligt
Bemästra verktyget TriBall I IRONCAD finns ett patenterat verktyg för 3D-positionering av objekt, kallat TriBall. Hyllad av en del som "Det mest användbara verktyget i CAD-historien" TriBall är otroligt