Industriella Styrsystem (TSIU04, TSIU06) Övningskompendium
|
|
|
- Siv Eliasson
- för 7 år sedan
- Visningar:
Transkript
1 Industriella Styrsystem (TSIU04, TSIU06) Övningskompendium 7 april 2016 REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING Reglerteknik, Institutionen för systemteknik, Linköpings universitet, Linköping
2 Detta kompendium har utvecklats under flera år av olika medarbetare vid Avdelningen för Reglerteknik vid Linköpings universitet.
3 Del I Uppgifter 1
4
5 Kapitel 1 Återkopplade system och PID-regulatorer 1.1 Återkopplat system I Personer med diabetes måste justera sin blodsockersnivå genom att tillföra insulin, vanligtvis med en spruta. Beskriv detta från ett reglertekniskt perspektiv. Vad är referens-, styr- och utsignal? Rita ett blockdiagram. 1.2 Återkopplat system II Betrakta ett system bestående av en cyklande person, där cykeln utgör det styrda systemet och cyklisten är regulator. Ge exempel på styrsignal, utsignal och störning för systemet. 1.3 Återkopplat system III Studera reglering av rumstemperaturen med hjälp av ett elektriskt värmeelement. Vad är styr-, referens- och utsignal? Rita ett blockdiagram. När ska systemet ge önskad rumstemperaturen? Finns det några störsignalen? Hur kan man lösa problemet med störsignalen? Rita ett nytt blockdiagram. 1.4 Återkopplat system IV Berakta en vattentank där vi är intresserade av att kontrollera nivån. Inflödet av vatten kontrolleras av en pump och tanken har ett utflöde till en annan tank. Ett sätt att uppnå ditt mål är att mäta den vattennivå, som du uppnår med några 3
6 4 KAPITEL 1. ÅTERKOPPLADE SYSTEM OCH PID-REGULATORER olika val av pumpstyrka (pumpstyrka). Du kan nu skapa en model för ditt system (vilken pumpstyrka som leder till vilken vattennivå). Kommer denna modell vara bra nog för att kontrollera vattennivån? Din vattentank har också ett extra utlopp. Vad ska händer när du öppnar detta? Kommer vattennivån fortfarande att bli den önskade? Hur kan man lösa det här problemet? 1.5 PID-regulatorn Ett exempel av återkoppling är en PID-regulator, som består av tre delar: en proportionell, en integrerande och en deriverande del. Vad har dessa för uppgift i regulatorn? 1.6 Stegsvar Ofta är man i reglerteknik intresserade av att studera stegsvar. Detta innebär att man lägger på ett steg (en hastig förändring mellan två signalnivåer) på en insignal eller referenssignal till ett system. Den utsignal som systemet skapar från denna insignal kallas för ett stegsvar (svaret på ett steg). Detta tillsammans med impulssvar (en hastig mycket kortvarig förändring av en signal) kan användas för att ta reda på ett systems dynamiska (tidsberoende) egenskaper. Vi är ofta intresserade av hur snabbt systemet är, vilken ordning det har och om det är stabilt (att en liten insignal inte kan skapa en för stor utsignal). Vi är nu intresserade av hur vårt system reagerar vid ett steg i referensvärdet. När man betraktar stegsvar är det intressant att analysera: (i) hur snabbt utsignalen når referenssignalen? (ii) finns det någon översläng? (iii) når utsignalen exakt referenssignalen eller blir det ett stationärt fel? (iv) har stegsvaret några oscillationer? I figur 1.2, ser du några stegsvar som du nu ska beskriva med avseende på dessa fyra egenskaper. 1.7 PID-parametrar (1) Betrakta ett återkopplat system med en PID-regulator. Figur 1.1 visar stegsvaret för ett återkopplat system med olika PID-parametrar. I figur 1.1a finns endast en proportionell del. Vilken linje representerar stora eller små P-värden? I figur 1.1b är regulatorn expanderad till en PI-regulator. Vilken linje representerar stora eller små I-värden? I figur 1.1c representerar en linje en PID regulator, vilken?
7 1.7. PID-PARAMETRAR (1) 5 Step Response Step Response Amplitude 0.8 Amplitude Time (seconds) Time (seconds) (a) (b) Step Response Amplitude Time (seconds) (c) Figur 1.1: Några olika stegsvar för en P, PI och PID-regulator.
8 6 KAPITEL 1. ÅTERKOPPLADE SYSTEM OCH PID-REGULATORER 1 1 A B 1 1 C D Figur 1.2: Fyra stegsvar. Axlarna har samma skalning. 1.8 PID-parametrar (2) Figur 1.2 visar stegsvaret för följande fyra kombinationer av koefficienter. Para ihop stegsvar och koefficienter. (1) K P = 4 K I = 0 K D = 0 (2) K P = 4 K I = 3 K D = 0 (3) K P = 4 K I = 1 K D = 0 (4) K P = 4 K I = 0 K D = 4
9 Kapitel 2 Skalning och överspill Skalning är ett viktigt begrepp när man arbetar med PLC:er, eftersom de PLC:er som används i laborationerna bara kan lagra heltal och inte decimaltal. För att kunna spara vissa decimaltal kommer man därför att behöva använda skalning. 2.1 Bråkräkning Hantering av skalade tal har likheter med bråkräkning. Beräkna därför följande uttryck och förenkla till enklast möjliga bråkform samt skriv ut vad de blir i decimaltalsform: a) b) c) d) 5 2 / 3 5 e) ( 2 3 ( 6) 7 / 5 2 ) 3 5 f) ( ( 6) 7 / 5 2 / ) Skalning Man behöver samma gemensamma nämnare när vi ska addera och subtrahera bråk. När man multiplicerar och dividerar bråk behöver talen inte ha samma nämnare. Detta kommer också att vara sant för skalade heltal. Vi skriver nu om nämnare i bråken som en skalfaktor, 2 3 uttrycker vi istället som 2[3] och utläser detta som 2 med skalfaktor 3. Detta blir i decimaltal ungefär 0.67 och har skalfaktor 1. Vi kan alltså se decimaltal som skalade tal med skalfaktor 1. Vi forsätter nu med ett antal uppgifter där ni ska skala om olika tal: 7
10 8 KAPITEL 2. SKALNING OCH ÖVERSPILL a) skala om 2[3] till ett tal med skalfaktor 6. b) skala om 4[7] till ett tal med skalfaktor 4 (vad får vi för nått problem nu?). c) skala om 7[1] till ett tal med skalfaktor 8. d) skala om 3[5] till ett tal med skalfaktor Räkning med skalade tal Lös följande uppgifter med hjälp av samma principer som i bråkräkning och genom att använda skalningen som ovan. a) 4[3] + 7[3] b) 5[1] + 2[3] c) 5[1] + 8[3] d) 3[2] 8[3] e) 7[2] 1[3] + 5[1] f) (7[2] 1[3])/5[1] 2.4 Begränsade intervall I många PLC:er kan man bara lagra heltal inom vissa intervall. Detta för att minneskapaciteten är mycket mer begränsad än vad man normalt är van med. De PLC:er som vi kommer att använda i den här kursen kan lagra 16 bitar per register, alltså tal inom intervallet = [ 32768, 32767], eftersom en bit är en teckenbit. Vi vill därför använda detta intervall så effektivt som vi kan. Med detta i åtanke, bestäm en skalfaktor så att vi kan lagra följande information så noggrant som möjligt: 1. spänning från en givare som kan variera mellan 5 och 5 volt. Vi har 10 (med en teckenbit) bitar till vårt förfogande. 2. vikt från en våg som varierar mellan 0 och 5000 kg. Vi har 16 bitar till vårt förfogande. 3. vattennivån i en tank som mäts av en givare som ger en spänning mellan 0 och 12 volt. Vi har 6 bitar till vårt förfogande.
11 2.5. PRECISION I BEGRÄNSADE INTERVALL Precision i begränsade intervall Betrakta åter intervallen i uppgift 2.4. Vilken precision har vi i respektive fall, d v s vad är den upplösning vi har i de talen vi kan spara eller hur liten skillnad kan vi spara i registret? 2.6 Addition av skalade tal Betrakta talen a och b där talet a är lagrat som 5 med en skalfaktor på 1, och talet b är lagrat som 7 med en skalfaktor på 2. Hur måste vi ändra a och/eller b för att kunna addera talen? 2.7 Precision vid multiplikation Antag nu att a är lagrad som 8 med en skalfaktor på 4 och b är lagrad som 3 med en skalfaktor på 1 2. Vi vill multiplicera ihop dessa tal. a) Vad har svaret för skalfaktor om vi inte skalar om variablerna? b) Antag nu att vi vill att svaret ska ha skalfaktorn 1. Vad blir resultatet? Antag att vi kan utföra multiplikationen först och sedan skala ner resultet. 2.8 Förberedelseuppgift till laboration Den inbyggda PID-regulatorn i laborationerna hämtar T i och T d från registren N7:4 respektive N7:5 med skalfaktor enligt tabellen nedan. Register Uttryck Faktor N7:4 T i 100 min 1 N7:5 T d 100 min 1 Eftersom våra vattentankar är en process där förlopp tar tider som är i storleksordningen sekunder, är det naturligt att använda just sekund som ingenjörsenhet för dessa variabler. Hur ska förhållandet mellan skalade (råa) värden och ingenjörsenheter ställas in? Ta i rejält och hantera intervallet 0 2 min. Fyll i tabellen nedan: T I och T D Min Max Skalade Ingenjör [min] 0 2 Ingenjör [s] Alla uppgifter nedan antar heltalsrepresentation med 2-komplementtal. Se appendix i slutet av avsnittet för vad som gäller för 6 bitar.
12 10 KAPITEL 2. SKALNING OCH ÖVERSPILL 2.9 Addition med binära tal Genomför följande additioner i binära tal. Antag att vi har tillgång till 6 bitar. Blir resultatet det förväntade? a) b) ( 10) + 12 c) 10 + ( 12) d) ( 10) + ( 12) 2.10 Multiplikation med överspill Vi vill nu genomföra multiplikationerna nedan. Vad blir resultatet om har obegränsat med bitar? Vad blir det om vi bara har tillgång till 6 bitar? Om överspill inträffar antar vi att svaret avrundas till det närmaste tal som kan representeras. a) 5 ( 6) b) 7 7 c) Vad måste vi göra för att få plats med alla bitarna i uppgift b)? 2.11 Skalad addition med överspill Vi vill addera två tal a och b, där talet a är lagrat som 5 med en skalfaktor på 1, och talet b är lagrat som 7 med en skalfaktor på 2. För att kunna addera talen måste de ha samma skalfaktor. Det finns (minst) två sätt att göra detta. När kan de olika sätten vara bra att använda? Motivera svaret Överspill i P-regulator Vi har nu bestämt oss för att göra en P-regulator, och vill utföra multiplikationen K e. e har skalfaktorn 1 och K har skalfaktorn 16. Vi vill att resultatet ska ha skalfaktorn 1. Vi har inte möjlighet att utföra multiplikationen först och sedan skala ned resultatet, utan måste skala ner antingen e eller K (eller båda två). Vilken eller vilka variabler skulle du skala ner och varför?
13 2.13. SKALAD MULTIPLIKATION MED ÖVERSPILL I Skalad multiplikation med överspill I Vi vill nu återigen multiplicera a och b. Denna gång är a representerat som 4 och b representerat som 6 där båda har skalfaktor 2. Vi vill att resultatet ska ha skalfaktor 1. Vi har endast tillgång till 6 bitar. Om överspill inträffar, avrunda till närmaste tal som går att representera. Genomför multiplikationen genom att a) Först genomföra multiplikationen a b och sedan skala resultatet så att skalfaktorn är 1. b) Först skala b så att b har skalfaktorn 1 2, och sedan genomföra multiplikationen. Vad blir resultetet? c) Vilken av ordningarna är att föredra? Varför då? 2.14 Skalad multiplikation med överspill II Samma uppgift som i uppgift 2.13, men nu är a = 4 och b = 14. Både a och b har skalfaktor 2. Vi vill att resultatet ska ha skalfaktor 1. Vi har endast tillgång till 6 bitar. Om överspill inträffar, avrunda till närmaste tal som går att representera. Genomför multiplikationen genom att a) Först genomföra multiplikationen a b och sedan skala resultatet så att skalfaktorn är 1. b) Först skala b så att b har skalfaktorn 1 2, och sedan genomföra multiplikationen. Vad blir resultetet? c) Vilken av ordningarna är att föredra? Varför då? 2.15 Överspillshantering i stegkod Efter att ha gjort uppgifterna 2.13 och 2.14, tänk ut ett bra sätt att genomföra multiplikationen a b. Rita gärna ett PLC-program (ladder diagram) eller skriv pseudokod för hur du tänkt. Antag att flaggan S5:0/1 visar om överspill har inträffat Överspill i PID-regulatorn I PID regulatorn har vi tre olika bidrag till styrsignalen: bidragen från den proportionella, integrerande och deriverande återkopplingenn. Alla tre bidrag måste adderas för att vi ska kunna ställa ut en styrsignal till pumpen. Kommer ihåg att additionsblocken kan bara addera två olika värden. Vi måste därför addera två bidrag i en första steg och det tredje bidraget i ett andra steg.
14 12 KAPITEL 2. SKALNING OCH ÖVERSPILL a) Ställ upp en pseudokod för detta samt ett stegkodsprogram. b) Låt bidraget från P-delen vara 24000, från I-delen vara och från D- delen vara Alla bidrag har skalfaktor 1. Försök nu addera dessa tal i alla möjliga ordningar. Vilka olika svar får vi? Glöm inte att PLC:n har begränsnad precision och maximala värde i PLC:n är 32767! c) Vi kan lösa problemet med överspill för detta fall genom att välja en lämplig ordning vid additionen. Men när talen i de olika delarna förändras, så kan vi råka ut för problem med överspill igen. Hur kan man använda skalning för att lösa detta problem? Lösningen ska inte bli perfekt för det här problemet men ska lösa alla problemen så bra som möjligt. Appendix Bitar Värde Bitar Värde Bitar Värde Bitar Värde Bitar Värde
15 Kapitel 3 PLC-programmering I PLC:n kan man spara värden i ett register. Registern har begränsad precision, så skalning är viktigt när man ska spara värden i PLC:n. Man programmerar oftast PLC:n med hjälp av stegkodsprogrammering (eng: ladder diagrams). 3.1 PLC-program från lab 1 Berätta om vad händer i det PLC-program som visas i figur 3.1. Vad gör DIVblocket och vad är input och output från blocket? Vad gör MOV-blocket? Vad gör N7:0/1 på vänstersidan? Titta också på tabellen nedan för att se vilken värden som finns i vilket register. 3.2 Villkor Utgå från PLC-programmet i figur 3.1. Betrakta den fjärde raden där variabeln N7:0/1 på den vänstra halvan, är ett exempel på en villkorlig händelse. Handlingen på högersidan utförs endast när villkoren på vänstersidan är uppfyllt. Utgå från den raden förändra vilkoret så att operationen (förflyttningen) utförs om a) N7:0/1 inte är ettsatt. b) N7:0/1 och N7:0/2 är båda ettsatta. c) N7:0/1 eller/och N7:0/2 är ettsatt. d) N7:0/1 eller N7:0/2 är nollsatta (observera är båda noll ska inget hända). e) N7:0/1 är ettsatt eller om N9:0 är större än f) N7:0/1 är ettsatt, N7:0/2 är nollsatt och N9:1 är mindre än
16 14 KAPITEL 3. PLC-PROGRAMMERING DIV I:3.0 2 N9:0 DIV I:3.1 2 N9:1 PID N7:0 N9:0 N9:2 N7:0/1 MOV N9:3 N9:2 MUL N9:2 2 O:3.0 Figur 3.1: PLC-programmet i lab 1
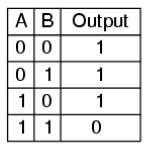
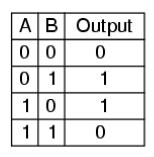
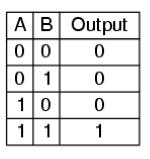
17 3.3. KOMBINATIONER AV OPERATIONEN 15 Tabell 3.1: Minnesanvändning i PLC:n. Datatyper refererar till InTouchs inbyggda datatyper och faktor beskriver skalningen i vardera register. Item Förklaring Datatyp Faktor I:3.0 Mätsignal från övre tank 1 I:3.1 Mätsignal från undre tank 1 O:3.0 Utsignal till pump 1 N9:0 Nivå övre tank I/O Real 1/2 N9:1 Nivå undre tank I/O Real 1/2 N9:2 Utsignal till pump I/O Real 1/2 N9:3 Manuell pumpstyrka I/O Real 1/2 N9:4 Nivå i den tank som ska regleras I/O Real 1/2 N9:5/0 Bit som styr vilken tank som regleras I/O Discrete N9:5/1 Bit som styr överfyllnadsskyddet I/O Discrete N7:0 PID-block (i själva verket hela N7) N7:0/1 Inaktiverings-bit, AM I/O Discrete N7:2 Börvärde (jämförs med N9:4) I/O Real 1/2 N7:3 K, förstärkning I/O Real 100 N7:4 T I, integreringstid i minuter I/O Real 100min 1 N7:5 T D, deriveringstid i minuter I/O Real 100min Kombinationer av operationen På samma sätt som man skapar komplicerade villkor kan man kombinera så att olika operationer utförs samtidigt. Utgå återigen från rad fyra i figur 3.1 och gör om operationen i den högra halvan så att följande utförs om N7:0/1 är ettsatt: a) Flytta N9:3 till N9:2 och multiplicera N9:2 med 2. b) Addera N9:2 med N9:1, multiplicera med 3 och spara i N9:3. c) Flytta N9:3 till N9:2 och nollsätt N7:0/ Sanningstablåer Ett sätt att representera de olika möjligheterna som kan uppstå om man använder ett antal olika villkor i kombination är true tables (sanningstablåer). Studera exemplen på olika enkla villkor som visas i a-d för att fylla i sanningstablåerna för uppgifterna e-h. I tablåerna använder vi 1 för att markera att lampan lyser och 0 för att markera att den är släckt. a) AND
18 16 KAPITEL 3. PLC-PROGRAMMERING b) OR c) NOT d) AUX
19 3.4. SANNINGSTABLÅER 17 e) NAND f) NOR g) XOR
20 18 KAPITEL 3. PLC-PROGRAMMERING h) AUX 3.5 Ett ytterligare programexempel I figur 3.2 visas ett enkelt PLC-program. Använd detta för att besvara de två nedanstående uppgifterna. a) Vad står i register O:3.0? b) Vad står i register N10:0?
21 3.6. ETT MER AVANCERAT EXEMPEL 19 Figur 3.2: Vad står det i de olika registren? 3.6 Ett mer avancerat exempel Följande skall utföras om registerbiten N2:0/0 är ettsatt. Två register, N1:0 och N1:1 skall adderas och svaret skall läggas i N1:2. Om resultatet är negativt skall istället absolutbeloppet beräknas. Om registerbiten N2:0/1 är satt till ett skall sedan resultatet divideras med 2. Skriv pseudokod samt översätt denna till RSLogixkod. Använd förgreningar för att skapa struktur i koden.
22 20 KAPITEL 3. PLC-PROGRAMMERING 3.7 Överfyllnadsskydd (fort.) Under laboration 1 införde ni ett överfyllnadsskydd till det skelett som visas i figur 3.1. Detta skydd slog om regulatorn till manuellt läge med styrsignal 0 om nivån i någon av tankarna översteg ungefär 90% av maximal nivå. För att komma ur detta läge måste man sedan manuellt återställa regulatorn tillbaka till automatiskt läge. Detta kan vara ett problem i situationer när processer är oövervakade. Vi vill därför införa någon automatik som återställer regulatorn till automatiskt läge om något villkor är uppfyllt. Komplettera därför den struktur som ni använde under laboration 1 som överfyllnadsskydd med följande: a) om nivån i båda tankar är mindre än 60%, så återställs drift i automatiskt läge. (tänk på att detta inte ska ske om vi är i manuellt läge från början, utan bara när ett överfyllnadslarm verkligen har löst ut). b) om överfyllnadslarmet har löst ut och automatisk drift har återsällts enligt villkoret i föregående uppgift, 5 gånger så ska ingen mer automatisk återställning ske. c) inför begränsningen att dessa 5 gånger måste inträffa inom 2 minuter för att ingen mer automatisk återställning ska ske. Programmet körs i 100 Hz och därmed ska time base vara 0.01 sekunder. d) slutligen, ersätt de fasta gränserna för skyddet samt återställningen med variabler. Inför två register där man kan ange vilken nivå (i procent av maximal fyllnadsnivå) då de två händelserna ska utföras. Tips: Skalning, registernamn och stegkodsprogrammet till laboration 1, hittar ni i föregående kapitel i tabell 3.1 samt figur 3.1. För c) använd en timer för att återställa räknaren för antal återställningar. 3.8 Automatisk lastning Ett sätt att utföra en operation med visst intervall är att använda en timer. Tänk dig att du har en process där en vagn ska fyllas med järnmalm ur ett lager. En flagga N11:17/0 indikerar att en ny tom vagn inväntar järnmalm. Använd en timer för att ettsätta variabeln N11:17/4 (som styr att bandet som fyller vagnen med järnmalm körs) under exakt 10 sekunder eller tills dess att N14:1/2 (vagnens överfyllnadsskydd) är ettsatt. PLC-programmet körs i 50 Hertz. Skriv ned både pseudokoden samt ett RSLogixschema som löser detta problem. 3.9 Att undvika förgreningar Antag att vi har ett program med tester och förgreningar till ett djup av 3 enligt:
23 3.10. FYLLNADSBEGRÄNSNING 21 N7:0/1 ADD N9:10 N9:11 N9:12 S:5/0 N9:10/15 MOV N9:12 N9:10/15 MOV N9:12 S:5/0 U Om man vill ha ett test i koden som kräver att flera villkor är uppfyllda samtidigt kan man seriekoppla testen. Till exempel kommer programmet N7:0/1 S:5/0 N9:10/15 MOV N9:12 endast utföra MOV-instruktionen om N7:0/1 är hög, S:5/0 är hög, och N9:10/15 är låg. Antag för övnings skull att förgreningar inte är tillåtna alls. Rita om programmet utan förgreningar! 3.10 Fyllnadsbegränsning Vi har ett system med två likadana tankar. Bordet de står på är feldimensionerat och klarar inte av tyngden om båda tankarna är fyllda, utan riskerar att gå sönder om den totala fyllnadsgraden är större än tyngd motsvarande 1, 4 ggr en fylld tank. Därför vill man larma då de två tankarna tillsammans är fyllda till mer än motsvarande 1, 2 ggr en fylld tank. Nivån för tank 1 lagras i register I:3.0 och nivågivaren ger data i intervallet Nivån för tank 2 lagras i register I:3.1 och nivågivaren ger data i intervallet Ett larm körs då flaggan N10:0/1 sätts till 1. Det finns även tomma register, N9:0-N9:2.
24 22 KAPITEL 3. PLC-PROGRAMMERING Skriv ett PLC-program som larmar då den totala vattenmängden är för stor. (Du behöver inte nollställa larmet.) Tips: Börja med skalning av variabler (här kan t.ex. % vara en lämplig enhet att arbeta i). Skriv sedan upp pseudokod för vad du vill göra och översätt till sist denna till PLC-kod Regelbaserad styrning av vattenkokare Vi har en speciell vattenkokare, som kan koka vatten till 70, 80 eller 100 grader. Denna nivå kan man välja med hjälp av en brytare som finns på vattenkokaren. Vi vill nu använda oss av regelbaserad reglering, där man ställer ut en utsignal beroende på regler som beror på insignalen. Lös nu följande uppgifter: a) vad är in- respektive utsignal i detta fall. b) vad är lämpliga regler för styrningen av vårt system? Kom ihåg att vi vill hålla temperaturen kring varje nivå men vi kan tillåta temperaturen att avvika några grader. c) skriv nu ett PLC-program som ska göra följande: i) ettställer värmaren för alla tre fall när vattnet är för kallt (använd intervallen från b). Börja med att skriva pseudokod om det hjälper dig. ii) När man programmerar brukar man vilja återanvända så mycket kod som möjligt. Kan du skriva om programmet på endast en rad? iii) Utöka din stegkodning så att en lampan indikerat om vatten är kallt eller varmt för att man inte ska bränna sig. Lampan ska vara blå när vatten är kallare än 40 grader. När vattnet är varmare ska lampan bli röd. Skriv denna utökning på samma rad som ni hade i föregående uppgift. Vattenkokaren har en temperaturgivare som nås genom registret I:1.0 och är kalibrerad så att 0 betyder 0 grader och betyder 100 grader. Värmaren nås genom registret O:1.0 och är endast en binär variabel där 0 betyder att värmaren är avstängd och 1 betyder att värmaren är på maximal effekt. Registren O:1.1 och O:1.2 styr den röda respektive blåa lampan på samma sätt som med värmaren Bilsortering Vi har en bilsorterare som kan detektera om bilen är blå, röd eller gul med hjälp av en sensor. För alla tre fall vill vi transportera bilen till ett och samma magasin. Vi vill också räkna hur många blåa, röda och gula bilar som har passerat sensorn. När vi har antingen tre blåa, röda eller gula bilar, vill vi införa ett alarm så att någon transporterar bilar vidare. Dock vill vi inte att larmet ska låta kontinuerligt
25 3.12. BILSORTERING 23 utan pipa till vart tredje sekund. Personen som kommer för att transportera bilar ska kunna återställa alarmen. Skriv pseudokod och stegkodningen. Du behöver bara fyra rader för att lösa problemet!
26 24 KAPITEL 3. PLC-PROGRAMMERING
27 Kapitel 4 PID-implementering 4.1 En tidskontinuerlig PID-regulator beskrivs av u(t) = K(e(t) + 1 T i t 0 de(t) e(τ)dτ + T d ). dt Diskretisera PID-regulatorn genom att använda Euler bakåt, dvs där T s är samplingstiden. d dt e(t) 1 T s (e(t) e(t T s )) 4.2 Om man approximerar den fasavancerande (lead-) regulatorn u(t) = KN p + b p + bn e(t) med Tustins formel får man en regulator av typen u(t) = β 1 u(t T s ) + α 1 e(t) + α 2 e(t T s ). Vilka värden får β 1, α 1 och α 2 om T s = 0.1, N = 10, b = 0.1 och K = 2? Ledning: Med operatorformalism kan Tustins approximationsformel skrivas p 2 T s q 1 q
28 26 KAPITEL 4. PID-IMPLEMENTERING 4.3 En tidsdiskret PID-regulator kan skrivas som S n = S n 1 + T s T i e n v n = K(e n + S n + T d (e n e n 1 )) T s u max om v n > u max u n = v n om u min v n u max u min om v n < u min Omparametrisera regulatorn ovan så att man får stötfri övergång vid parameterbyten. 4.4 En tidsdiskret PID-regulator kan skrivas som I n = I n 1 + K T s T i e n v n = Ke n + I n + K T d (e n e n 1 )) T s u max om v n > u max u n = v n om u min v n u max u min om v n < u min Denna rättframma implementering leder till problem då styrsignalen mättar, s.k. intergratoruppvridning. (a) Inför anti-windup (dvs undvik integratoruppvridning) genom att skriva PIDregulatorn ovan på differentiell form. (b) Inför anti-windup genom att justera I-delen. (c) Inför anti-windup genom villkorlig integration.
29 I tidskritiska system är det viktigt att minimera beräkningstiderna. Betrakta en PID-regulator I n = I n 1 + K T s T i e n v n = Ke n + I n + K T d (e n e n 1 )) T s u max om v n > u max u n = v n om u min v n u max u min om v n < u min Inför nya konstanter istället för K, T s, T i och T d som minimerar antalet aritmetiska operationer i själva reglerloopen. Hur kan de nya konstanterna beräknas ur de gamla? 4.6 Skriv om PID-regulatorn i uppgift 4.5 ovan så att allt som inte beror på senaste mätning är förberäknat dvs v n = a + b e n där a innehåller all information till och med föregående samplingsögonblick. 4.7 Antag att vi vill implementera en PID-regulator i något högnivåspråk. Strukturera koden för regulatorn enligt 1. Läs insignaler 2. Beräkna styrsignal 3. Ställ ut styrsignal 4. Uppdatera tillstånd 5. Vänta till nästa samplingsögonblick Lägg så få beräkningar som möjligt i Beräkna styrsignal så att ev beräkningsfördröjningar minimeras.
30 28 KAPITEL 4. PID-IMPLEMENTERING 4.8 I figuren nedan visas en P-regulator med så kallad automatisk nollägesjustering. 1 pt 1 Σ e κ Σ u Visa att denna regulator egentligen är en PI-regulator, det vill säga bestäm vad K och T i är uttryckta i κ och T så att det gäller att t ) u(t) = K (e(t) + 1Ti e(τ) dτ 0 för blockschemat i figuren.
31 Kapitel 5 Sekvensstyrning 5.1 Vilka av följande grafer är korrekta Grafcet-grafer (förutom att de saknar initialsteg)? A B C D u E F u u u G H I J u1 u2 u1 u2 u u K L M N u1 u2 u u1 u2 29
32 30 KAPITEL 5. SEKVENSSTYRNING 5.2 Vilka av följande grafer anger ett korrekt Grafcet-beteende? A u = 1 u u (Avfyrning) u u B u = 1 u u (Avfyrning) u u C u = 1 u u (Avfyrning) u u D u = 1 u u (Avfyrning) u u E u u = 1 (Avfyrning) u F u u = 1 (Avfyrning) u
33 I följande Grafcet-graf finns det en potentiell konflikt om u och v blir sanna samtidigt. Justera grafen så att endast ett övergångsvillkor åt gången kan bli sant, och om både u och v blir sanna samtidigt ska u ges prioritet. 1 u v I figuren nedan visas en förarlös vagn, vilken går mellan punkterna A och B, där det finns sensorer (med samma namn) som indikerar närvaro av vagn. För att köra vagnen åt höger ges signalen H = 1, och på samma sätt ges signalen V = 1 för att köra vagnen åt vänster. V H m A MOTOR B Konstruera ett Grafcet-program som styr vagnen enligt följande. 1. Vagnen står initialt i punkten A. 2. Då operatören trycker på knappen m och vagnen står vid punkten A ska vagnen köra åt höger tills den når punkten B. 3. Vid punkten B skall vagnen vänta tills signalen K blir hög eller att det tagit maximalt 60 sekunder. 4. Därefter ska vagnen återvända till punkten A och invänta nytt kommando.
34 32 KAPITEL 5. SEKVENSSTYRNING 5.5 Synkronisering Betrakta ett produktionssystem som består av två delprocesserna P 1 och P 2 som beror av varandra. P 1 utför handlingen H 1, men måste därefter vänta tills P 2 har utfört handlingen H 2, och därefter upprepar P 1 cykeln. P 2 måste vänta tills P 1 har utfört handlingen H 1 och utför därefter handlingen H 2 och cykeln upprepas. Eftersom detta är två olika processer och handlingarna H 1 och H 2 i själva verket är mycket komplicerade (se dem som makrosteg), så föredrar man att separera P 1 och P 2 i varsin graf. Använd de interna signalerna REDO och KVITT för synkronisering, och skriv ett Grafcet-program som löser uppgiften. Ledtråd: Det kan vara lättare om man tänker på några konkreta processer: Låt t ex P 1 vara en press för plastdetaljer och P 2 vara en (plock)robot som plockar ut detaljerna då P 1 pressat klart. I det programverktyg som används i Lego-laborationen i kursen finns det ej stöd för villkorliga handlingar. Istället kan man placera logiska villkor i ett separat reläschema i anslutning till Grafcet-programmet. Hur detta görs beskrivs närmare i tillhörande Labb-PM. Studera därför hur detta görs innan uppgifterna nedan påbörjas. 5.6 Funktionsdiagram och relälogik I Vi vill skapa ett program som, när START är ettställd, kör en bil framåt (E1F) till punkt A som indikeras av sensorn S1. Efter detta, ska bilen köras (bakåt, E1B) tillbaka till startpunkten, som indikeras av sensorn S2. a) Ta fram ett styrprogram som enbart använder Grafcet. b) Ta fram ett styrprogram där Grafcet-programmet kombineras med relälogik och hjälpvariabler på det sätt som beskrivs i PM för Lego-labben. 5.7 Funktionsdiagram och relälogik II Antag att man vill skapa en automatisk process för att hämta upp vatten från en brunn. En motor kan köra en hink uppåt (E1U) eller nedåt (E1D) i brunnen. När startknappen är nedtryckt (variabel START är ettställd) skall hinken hissas ned till vattnet. Att hinken är nedsänkt i vattnet indikeras av att sensor S2 är ettställd. Efter 10 sekunder är hinken fylld och hinken kan hissas upp igen. Hinken är uppe när sensorn S1 är ettställd. Ta fram ett Grafcet-program och relälogik som löser uppgiften.
35 5.8. BILMÅLNING Bilmålning Antag att det finns en station i en bilfabrik där bilen ska målas innan den skickas vidare till ett lager. Vid målningsstationen finns det en spärr som kan stängas med hjälp av motorn E21F. Att spärren är i sitt främre ändläge detekteras av sensorn S53 är nollställd. Vidare kan närvaron av en bil vid målningsstationen detekteras genom att fotosensorn S52 är nollställd. Målningen sker automatiskt genom att man ettställer E20F tills hela bilen är målad, vilket detekteras av att sensorn S51 är ettställd. Ta fram ett Grafcet-program plus relälogik som löser uppgiften. Här kan ett steg ha fler än en handling. Utgå från att det räcker men två steg. I första steget skall programmet säga till den andra stationen att man är redo att få en ny bil samt sluta spärren så ingen bil kan åka vidare, och i det andra steget ska bilen målas. Hur kan man lösa problemet med att sensorn S52 är brusig om man vill vara säker på att det finns en bil i stationen?
36 34 KAPITEL 5. SEKVENSSTYRNING
37 Del II Lösningar/Svar 35
38
39 Kapitel 1 Återkopplade system och PID-regulatorer 1.1 Referenssignal är önskad blodsockersnivå, styrsignal är tillfört insulin, utsignal är uppmätt blodsockersnivå. 1.2 Ett exempel är: Styrsignal är styrets vinkling, utsignal är hjulets position jämfört med en referenstrajektoria, och störsignal är vind eller lutning. 1.3 Rumstemperaturen är utsignal, styrsignalen är effekten i värmeelementet, referenssignalen är önskad rumstemperatur. Systemet ska ge önskad rumstemperaturen när modellen av system är korrekt. Modellen är inte korrekt när det finns några omodellerade störsignalen, till exempel utetemperaturen. När du har bara ett blockdiagram med referens-, styr- och utsignal, kan du inte kompensera när utetemperaturen förändras. Återkoppling är viktigt för att lösa det här problemet. 1.4 Modellen är bra för att kontrollera vattennivån men fungerar inte när du öppnar det andra utloppet. Man kan lösa problemet med återkoppling. Detta eftersom att 37
40 38 KAPITEL 1. ÅTERKOPPLADE SYSTEM OCH PID-REGULATORER vi kan se det andra utloppet som en störning till systemet som inte finns med i modellen. 1.5 Proportionell del Stort värde på K P leder till ökad snabbhet hos regulatorn, men kan också leda till överslängar och försämrade stabilitetsmarginaler. Integrerande del Denna del tar bort det stationära felet. För stort värde på K I leder i regel till ett oscillativt beteende på stegsvaret. Deriverande del Denna del kan minska överslängar och förbättra dämpningen hos systemet Den heldragna linjen i figur 1.1a har ett litet P-värde eftersom det finns en liten översläng men ett stort stationärt fel. Stora P-värden ger en större översläng (instabilt beteende) men ett mindre stationärt fel. Den heldragna linjen i figur 1.1b har ett litet I-värde. Stora I-värden ger ett oscillativt beteende på stegsvaret. Heldragnen linje i figur 1.1c representerar stegsvaret från PID-regulatorn. Den deriverande delen minskar överslängar och förbättrar dämpningen hos systemet. 1.8 Från uppgift 1.5 vet vi att den integrerande delen av PID-regulatorn tar bort det stationära felet. Vi noterar att stegsvaren A och D har ett stationärt fel och vi inser således att K I = 0 för dessa regulatorer. Därför måste A och D tillhöra koefficientkombinationerna (1) och (4). D har en liten översläng och borde således sakna dämpning i form av en deriverande del, alltså K D = 0. Därmed erhåller vi A-4 och D-1. Kvar har vi två system som saknar deriverande verkan i PID-regulatorn. Vi ser att kombinationen (2) har större K I vilket leder till en större översläng och mer oscillativt beteende i stegsvaret än för en regulator med deriverande verkan. Vi erhåller därmed slutligen B-2 och C-3. Sammantaget har vi: A-4, B-2, C-3, D-1
41 Kapitel 2 Skalning och överspill 2.1 a) = = 11 6 = b) = = = c) = = 7 9 d) 5 2 / 3 5 = = 25 6 = e) ( ) / ( f) ( ) / ( 5 2 / 3 5 a) 2[3] = 2 2[3 2] = 4[6] ) = 7 9 / = = ) = 11 6 / 25 6 = = b) 4[7] = [7 4 7 ] = 16 7 [4] = [4] 2[4] c) 7[1] = 7 8[1 8] = 56[8] d) 3[5] = 3 3[5 3] = 9[15] a) 4[3] + 7[3] = 11[3] b) 5[1] + 2[3] = 5 3[1 3] + 2[3] = 15[3] + 2[3] = 17[3] c) 5[1] + 8[3] = 5 3[1 3] + 8[3] = 15[3] + 8[3] = 7[3] 39
42 40 KAPITEL 2. SKALNING OCH ÖVERSPILL d) 3[2] 8[3] = 3 8[2 3] = 24[6] = 4[1] e) 7[2] 1[3] + 5[1] = 7 1[2 3] + 5[1] = 7[6] + 5[1] = 7[6] + 30[6] = 37[6] f) (7[2] 1[3]) /5[1] = (7 1[2 3]) /5[1] = 7[6]/5[1] = 7[6] 1[5] = 7 1[6 5] = 7[30] a) Vi har 10 bitar varav en teckenbit till vårt förfogande, så vi kan lagra heltal inom intervallet [ 511, 511]. Vi låter 5 volt lagras som 511 och 5 lagras som volt får lagras som 0 i vårt register. Vilken skalfaktor ska vi då ha? Vi ställer upp (511 ( 511))(5 ( 5)) = 1022/ Vi lagrar alltså talen med skalfaktor [1] volt blir således 102[102], när vi lagrar det i vår PLC. b) På samma sätt som tidigare, 16 bitar (observera ingen teckenbit) gör att vi som störst kan lagra = i vårt register. 0 kg får bli 0 i registret och 5000 kg får lagras som Vi räknar ut skalfaktorn på samma sätt som i a), alltså ( )/(5000 0) 13 vilket blir vår skalfaktor. c) På samma sätt som tidigare, 6 bitar (observera ingen teckenbit) gör att vi som störst kan lagra = 63 i vårt register. 0 volt får bli 0 i registret och 5 volt får lagras som 63. Vi räknar ut skalfaktorn på samma sätt som i a), alltså (63 0)/(12 0) 5 vilket blir vår skalfaktor. Precisionen räknar vi ut som den minsta skillnad vi kan lagra. Detta blir således 1/k där k är vår skalfaktor. 2.6 a) 1/k = 1/ volt är precisionen i vår lagring. Vi kan inte lagra spänningar mindre än detta. b) 1/k = 1/ kg alltså 80 gram. c) 1/k = 1/5 = 0.2 volt. Vi kan antingen skala upp a eller skala ner b. Att skala ner b leder till minskad precision, men svaret tar upp färre bitar. Att skala upp a leder till bättre precision men riskerar att orsaka överspill. Om vi väljer att skala upp a kommer vi erhålla 2a + b = = 17 med skalfaktor 2, om vi istället skalar ned b erhåller vi a + b/2 = 5 + 7/2 = 17/2 med skalfaktor 1 som avrundas till 8 eller 9 beroende på hårdvarans egenskaper.
43 a) Skalfaktorn blir 2, ty a har skalfaktor 4 och b har 1 2 och vid multiplication ska blir den nya skalfaktorn produkten av de två gamla, alltså = b) Svaret blir 12, ty vi får 3 8 = 24 med skalfaktor 2 (enligt a) och således får vi 12 med skalfaktor 1. Förberedelseuppgift till laboration PID-implementering i PLC. 2.9 a) (22) b) (2) c) (-2) d) (-22) 2.10 a) I båda fallen blir svaret 30 (100010) b) Har vi obegränsat med bitar blir svaret 49, (110001). Har vi endast tillgång till 6 bitar blir svaret 31 (011111). Observera att talet är lika med 15 eftersom den första biten är en teckenbit. c) Vi måste skala ner någon eller båda av talen Vi måste skala bitarna så de har samma skalfaktor. Vi kan antingen skala upp a eller skala ner b. Att skala ner b leder till minskad precision, men svaret tar upp färre bitar. Att skala upp a leder till bättre precision men riskerar att orsaka överspill Förmodligen är det så att skalfaktorn med för K är vald med omsorg för att få mesta möjliga upplösning i K. Isåfall är det bäst att skala ner e eftersom de sista bitarna är de mest brusiga, och informationen som förloras isåfall inte är viktig.
44 42 KAPITEL 2. SKALNING OCH ÖVERSPILL 2.13 a) Då blir svaret 6. b) Då blir svaret 4. c) Det är bäst att först utföra multiplikationen och sedan skala resultatet eftersom man då inte förlorar någon information a) I multiplikationen inträffar överspill, och svaret blir därför 7. b) Nu inträffar inget överspill, och restultatet blir 12, vilket inte är det rätta värdet (vilket skulle vara 14), men det är bättre än att först utföra multiplikationen och sedan skala resultatet. c) I detta fallet är det bästa att först skala svaret eftersom om överspill inträffar så förloras mer information Ett bra sätt att göra det på är att först försöka genomföra multiplikationen a b och undersöka om överspill inträffar. Om överspill inte inträffar skalar man ner resultatet och sparar undan det. I annat fall, dvs om överspill har inträffat skalar man först ner en eller båda variablerna och utför därefter multiplikationen. 2.16
45 Kapitel 3 PLC-programmering 3.1 DIV-blocket dividerar det första argumentet med det andra och returnerar svaret till det tredje. I detta fall dividerar (skalar) vi insignalen som hämtas från registret I:3.0 med 2 och sparar i N9:0. MOV flyttar talet i det första argumentet till det andra. Grinden med N7:0/1 kontrollerar om registret är ettställt, då utförs MOV (manuell styrsignal). 3.2 a) - b) N7:0/1 MOV N7:0/1 MOV N7:0/1 N7:0/2 MOV N7:0/1 MOV N7:0/1 MOV 43
46 44 KAPITEL 3. PLC-PROGRAMMERING c) - f) N7:0/2 MOV N7:0/2 N7:0/1 MOV N7:0/1 MOV N7:0/1 N7:0/2 MOV N7:0/1 N7:0/2 N7:0/1 MOV N7:0/1 MOV N7:0/1 MOV GRT N9: N7:0/1 MOV N7:0/1 MOV N7:0/1 N7:0/2 LES N9: MOV N7:0/1 MOV N7:0/1 MOV
47 a) - c) N7:0/1 MOV N9:2 N9:3 MUL N9:2 2 N9:2 N7:0/1 MOV N7:0/1 ADD N9:2 N9:1 N9:3 N7:0/1 N7:0/1 U MUL N9:3 3 N9:3 MOV N9:3 N9:2 N7:0/1 MOV N7:0/1

48 46 KAPITEL 3. PLC-PROGRAMMERING 3.4 e) NAND f) NOR g) XOR h) AUX
49 a) I 0:3.0 står värdet b) I N10:0 står värdet 600. Observera att värdet hela tiden skrivs över så det är det senast inlagda värdet i varje register som lagras. Pseudokod: (:= betyder tilldelas) if N2:0/0 == 1 [om registerbiten är ettsatt skall beräkningarna utföras] N1:2 := N1:0 + N1:1 [addition] if N1:2 < 0 [om summan är negativ] N1:2 := N1:2 * -1 [absolutbeloppet] end if if N2:0/1 == 1 N1:2 := N1:2 / 2 end if [om ettsatt skall svaret halveras] end if Vi vill först skala om de två nivåerna med skalfaktorerna 8 resp. 120 för att få båda nivåerna i %. Därefter adderas de (okej eftersom de båda är i %) och den totala volymen beräknas. Om denna är för hög sätts larmregistret. Pseudokod: (:= betyder tilldelas) N9:0 := I:3.0 / 8 [skala om nivå tank 1 till \%] N9:1 := I:3.1 / 120 [skala om nivå tank 2 till \%] N9:2 := N9:0 + N9:1 [total vattenmängd i tankarna i \%]
50 48 KAPITEL 3. PLC-PROGRAMMERING if N9:2 >= 120 [om nivån är för hög] N10:0 := 1 [sätt larmregistret] end if
51 Figur 3.1: Lösningsförslag till uppgift
52 50 KAPITEL 3. PLC-PROGRAMMERING
53 Kapitel 4 PID-implementering 4.1 Med operatorformalism fås Euler bakåt ger u(t) = K(1 + 1 T I 1 p + T Dp)e(t) u(t) = K(1 + 1 T S T I 1 q 1 + T 1 D (1 q 1 ))e(t) T S genom multiplicera båda sidor med (1 q 1 ) för att ta bort nämnaren i den diskretiserade integralen, erhåller vi 4.2 Ersätt p med 2 T s q 1 q+1 : u(t) = u(t T S ) + K(e(t) e(t T S )) + K T S T I e(t) + K T D T S (e(t) 2e(t T S ) + e(t 2T S )) u(t) = KN 2 q 1 T s 2 q 1 T s q+1 q+1 + b e(t) + bn 2 2 T u(t + T s ) = s bn T 2 u(t) + KN s + b 2 T s + bn T s + bn e(t + T s) + kn b 2 T s 2 T s + bn e(t) Numeriskt får vi α , α och β
54 52 KAPITEL 4. PID-IMPLEMENTERING 4.3 Enligt avsnitt 2.4 i kurskompendiet kan man omparametrisera regulatorn som följer: I n = I n 1 + K T S T I e n v n = Ke n + I n + K T D (e n e n 1 ) T S u max, om v n > u max u n = v n, om u min v n u max u min, om v n < u min 4.4 (a) Differentiell form: v n = v n v n 1 = = K(e n e n 1 ) + I n I n 1 + K T D T S (e n 2e n 1 + e n 2 ) = = K(e n e n 1 ) + K T S T I e n + K T D T S (e n 2e n 1 + e n 2 ) u max om u n 1 + v n > u max u n = u n 1 + v n om u min u n 1 + v n u max u min om u n 1 + v n < u min (b) Justering av I-delen: I n = I n 1 + K T S T I e n + T S T t (u n 1 v n 1 ) v n = Ke n + I n + K T D (e n e n 1 ) T S u max om v n > u max u n = v n om u min v n u max u min om v n < u min (c) Villkorlig integration:
55 if (VILLKOR) then I n = I n 1 + K T S T I e n ; v n = Ke n + I n + K T D (e n e n 1 ) T S u max om v n > u max u n = v n om u min v n u max u min om v n < u min VILLKOR kan vara t.ex. e ɛ där ɛ är en konstant. Om VILLKOR ej är uppfyllt så fås I n = I n där K 1 = K + K T D TS, K 2 = K T D TS I n = I n 1 + K 3 e n v n = K 1 e n + I n + K 2 e n 1 och K 3 = K T S TI. a = I n 1 K T D T S e n 1 b = K(1 + T D T S + T S T I ) Med förberäkning av hjälpstorheter enligt tidigare uppgift fås: ReadInput(y r, y) e := y r y; v := a + b e; if v > u max then u := u max elseif v < u min then u := u min
56 54 KAPITEL 4. PID-IMPLEMENTERING else u := v; Out(u); I := I + K T S TI e; a := I K T D TS e; b := K + K T D TS Wait; K T S TI ; Vi börjar med att skriva om PI-regulatorn med hjälp av derivationsoperatorn p, ( u(t) = K ) ( ) 1 + Ti p e(t) = K e(t). T i p T i p Låt oss införa hjälpvariabeln x som betecknar signalen som går in i blocket 1 pt figuren. Då får vi direkt ur figuren att u(t) = κe(t) + 1 pt x(t) i och vilket tillsammans ger att x(t) = u(t) 1 pt x(t) ( ) 1 + pt u(t) = κ e(t). pt Genom identifiering av parametrarna får vi nu att K = κ, T i = T.
57 Kapitel 5 Sekvensstyrning 5.1 (a) Korrekt (b) Korrekt. Övergångar utan in-steg brukar kallas käll-övergångar (eng: source transitions). Vidare gäller att övergångar utan ut-steg brukar kallas sänkövergångar (eng: sink transitions). I detta fall är övergången både en sänka och en källa. (c) Korrekt. Övergången är en sänka. (d) Korrekt. Övergången är en källa. (e) Felaktig. Det måste finnas en övergång mellan två steg. (f) Korrekt. (g) Korrekt. (h) Korrekt. (i) Felaktig. Den enda gången man kan föra samman bågar är efter övergångar eller med hjälp av dubbelstreck (parallellförgrening). (j) Felaktig. Enda sättet man kan splittra bågar är innan övergångar eller med hjälp av dubbelstreck (parallellförgrening). (k) Felaktig. Bågarna innan parallellförgreningen måste föras samman till en båge. Annars är det oklart om detta skall tolkas som början eller slutet på en parallellförgrening. (l) Felaktig. En övergång saknas. 55
58 56 KAPITEL 5. SEKVENSSTYRNING (m) Korrekt. (n) Felaktig. Två övergångar saknas. 5.2 (a) Korrekt. (b) Felaktig. Alla övergångar som är mottagliga (dvs alla steg omedelbart före övergången är aktiva) kommer att avfyras (dvs alla steg omedelbart före övergången deaktiveras och alla steg omedelbart efter övergången aktiveras). (c) Korrekt. (d) Felaktig. Det vänstra steget skulle också ha aktiverats. (e) Felaktig. Samma motivering som ovan. (f) Korrekt u v * /u 2 3
59 S0 m S2 H b S3 D TimeOut 60 s K + TimeOut S4 V a 5.5 P1: P2: H1 5 1 REDO 1 H2 3 REDO 6 KVITT KVITT /REDO
60 58 KAPITEL 5. SEKVENSSTYRNING Se avsnitt 5.7 i PM för Lego-labben.
Industriella Styrsystem Övningskompendium
 Industriella Styrsystem Övningskompendium 13 januari 2012 REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING Reglerteknik, Institutionen för systemteknik, Linköpings universitet, 581 83 Linköping www.control.isy.liu.se
Industriella Styrsystem Övningskompendium 13 januari 2012 REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING Reglerteknik, Institutionen för systemteknik, Linköpings universitet, 581 83 Linköping www.control.isy.liu.se
Industriella Styrsystem Övningskompendium
 Industriella Styrsystem Övningskompendium 14 mars 2013 REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING Reglerteknik, Institutionen för systemteknik, Linköpings universitet, 581 83 Linköping www.control.isy.liu.se
Industriella Styrsystem Övningskompendium 14 mars 2013 REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING Reglerteknik, Institutionen för systemteknik, Linköpings universitet, 581 83 Linköping www.control.isy.liu.se
Industriella Styrsystem Övningskompendium
 Industriella Styrsystem Övningskompendium 27 mars 2012 REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING Reglerteknik, Institutionen för systemteknik, Linköpings universitet, 581 83 Linköping www.control.isy.liu.se
Industriella Styrsystem Övningskompendium 27 mars 2012 REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING Reglerteknik, Institutionen för systemteknik, Linköpings universitet, 581 83 Linköping www.control.isy.liu.se
TSIU06 - Lektion 1. Johan Dahlin [johan.dahlin(at)isy.liu.se] 14 mars Mycket viktigt att ni ställer frågor om ni inte förstår!!
![TSIU06 - Lektion 1. Johan Dahlin [johan.dahlin(at)isy.liu.se] 14 mars Mycket viktigt att ni ställer frågor om ni inte förstår!!](/thumbs/93/113589658.jpg "TSIU06 - Lektion 1. Johan Dahlin [johan.dahlin(at)isy.liu.se] 14 mars Mycket viktigt att ni ställer frågor om ni inte förstår!!") TSIU06 - Lektion 1 Johan Dahlin [johan.dahlin(at)isy.liu.se] 14 mars 2012 1 Allmän kursinformation Vem är jag? Johan Dahlin, doktorand, osv. Kontaktuppgifter! johan.dahlin@isy.liu.se, finns i A-korridoren
TSIU06 - Lektion 1 Johan Dahlin [johan.dahlin(at)isy.liu.se] 14 mars 2012 1 Allmän kursinformation Vem är jag? Johan Dahlin, doktorand, osv. Kontaktuppgifter! johan.dahlin@isy.liu.se, finns i A-korridoren
Grunderna i stegkodsprogrammering
 Kapitel 1 Grunderna i stegkodsprogrammering Följande bilaga innehåller grunderna i stegkodsprogrammering i den form som används under kursen. Vi kommer att kort diskutera olika datatyper, villkor, operationer
Kapitel 1 Grunderna i stegkodsprogrammering Följande bilaga innehåller grunderna i stegkodsprogrammering i den form som används under kursen. Vi kommer att kort diskutera olika datatyper, villkor, operationer
PID N7:0 N9:0 N9:2. PID-implementering i PLC. Laboration i industriella styrsystem. Denna version: 16 april Namn: Personnr: Datum: Godkänd:
 Laboration i industriella styrsystem PID-implementering i PLC Denna version: 16 april 2013 PID N7:0 N9:0 N9:2 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godkänd: Tabell 1. Godkännande
Laboration i industriella styrsystem PID-implementering i PLC Denna version: 16 april 2013 PID N7:0 N9:0 N9:2 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godkänd: Tabell 1. Godkännande
Industriella styrsystem, TSIU04. Föreläsning 1
 Industriella styrsystem, TSIU04 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Mål Ge kunskaper och färdigheter om reglerteknik närmare verkligheten. Mera precist: Trimning av PID-regulatorer.
Industriella styrsystem, TSIU04 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Mål Ge kunskaper och färdigheter om reglerteknik närmare verkligheten. Mera precist: Trimning av PID-regulatorer.
Lösningar till tentamen i styr- och reglerteknik (Med fet stil!)
") Lösningar till tentamen i styr- och reglerteknik (Med fet stil!) Uppgift 1 (4p) Figuren nedan visar ett reglersystem för nivån i en tank.utflödet från tanken styrs av en pump och har storleken V (m 3 /s).
Lösningar till tentamen i styr- och reglerteknik (Med fet stil!) Uppgift 1 (4p) Figuren nedan visar ett reglersystem för nivån i en tank.utflödet från tanken styrs av en pump och har storleken V (m 3 /s).
Industriella styrsystem, TSIU06. Föreläsning 1
 Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Utgångspunkter Vad? Varför? Hur? Vad? Reglerteknik - Konsten att styra system automatiskt Vad? System - Ett objekt
Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Utgångspunkter Vad? Varför? Hur? Vad? Reglerteknik - Konsten att styra system automatiskt Vad? System - Ett objekt
Föreläsning 2. Reglerteknik AK. c Bo Wahlberg. 3 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Industriella styrsystem, TSIU06. Föreläsning 1
 Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Kursöversikt 2(34) Detta är en laborations- och projektkurs. Praktiken kommer före teorin (kursen Reglerteknik) Tre
Industriella styrsystem, TSIU06 Föreläsning 1 Reglerteknik, ISY, Linköpings Universitet Kursöversikt 2(34) Detta är en laborations- och projektkurs. Praktiken kommer före teorin (kursen Reglerteknik) Tre
Industriella styrsystem, TSIU06. Föreläsning 2
 Industriella styrsystem, TSIU06 Föreläsning 2 Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 1 2(24) Det finns en stor mängd system och processer som behöver styras. Återkopplingsprincipen:
Industriella styrsystem, TSIU06 Föreläsning 2 Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 1 2(24) Det finns en stor mängd system och processer som behöver styras. Återkopplingsprincipen:
TENTAMEN I REGLERTEKNIK
 TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen.
 Reglering Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen. Regulator eller reglerenhet används för att optimera
Reglering Läran om återkopplade automatiska system och handlar om hur mätningar från givare kan användas för att automatisk göra förändringar i processen. Regulator eller reglerenhet används för att optimera
PID N7:0 N9:0 N9:2. PID-implementering i PLC. Laboration i industriella styrsystem. Denna version: 31 januari Namn: Personnr: Datum: Godkänd:
 Laboration i industriella styrsystem PID-implementering i PLC Denna version: 31 januari 2018 PID N7:0 N9:0 N9:2 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godkänd: Tabell 1. Godkännande
Laboration i industriella styrsystem PID-implementering i PLC Denna version: 31 januari 2018 PID N7:0 N9:0 N9:2 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godkänd: Tabell 1. Godkännande
Lunds Tekniska Högskola Avdelningen för industriell elektroteknik och automation
 Lunds Universitet LTH Ingenjörshögskolan i Helsingborg Lunds Tekniska Högskola Avdelningen för industriell elektroteknik och automation REGLERTEKNIK Laboration 2 Empirisk undersökning av PID-regulator
Lunds Universitet LTH Ingenjörshögskolan i Helsingborg Lunds Tekniska Högskola Avdelningen för industriell elektroteknik och automation REGLERTEKNIK Laboration 2 Empirisk undersökning av PID-regulator
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: G32 TID: 8 juni 217, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 7-311319 BESÖKER SALEN: 9.3,
Laboration i Industriella styrsystem (TSIU04, TSIU06) Processdator. Denna version: 5 januari Namn: Personnr: Datum: Godknd: LINKÖPING
 Processdator. Denna version: 5 januari Namn: Personnr: Datum: Godknd: LINKÖPING") Laboration i Industriella styrsystem (TSIU04, TSIU06) Processdator Denna version: 5 januari 2018 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godknd: Innehåll 1 Syfte och organisation
Laboration i Industriella styrsystem (TSIU04, TSIU06) Processdator Denna version: 5 januari 2018 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godknd: Innehåll 1 Syfte och organisation
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: Ter2 TID:4 mars 207, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 0730-9699 BESÖKER SALEN:
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING SAL: Ter2 TID:4 mars 207, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 0730-9699 BESÖKER SALEN:
TSIU61: Reglerteknik. Sammanfattning från föreläsning 3 (2/4) ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.
 ˆ PID-reglering. ˆ Specifikationer. ˆ Sammanfattning av föreläsning 3.") TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU6 Föreläsning 4 Gustaf Hendeby HT 207 / 22 Innehåll föreläsning 4 TSIU6: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik. PID-reglering Specifikationer. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 4 PID-reglering Specifikationer Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 4 Gustaf Hendeby HT1 2017 1 / 22 Innehåll föreläsning 4 ˆ Sammanfattning av föreläsning
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2014-03-17 Sal (1) TER2,TER3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2014-03-17 Sal (1) TER2,TER3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken
För att få ett effektiv driftsätt kan det ibland behövas avancerad styrning.
 För att få ett effektiv driftsätt kan det ibland behövas avancerad styrning. Används för att reglera en process. T.ex. om man vill ha en bestämd nivå, eller ett speciellt tryck i en rörledning kanske.
För att få ett effektiv driftsätt kan det ibland behövas avancerad styrning. Används för att reglera en process. T.ex. om man vill ha en bestämd nivå, eller ett speciellt tryck i en rörledning kanske.
Labb i industriella styrsystem. Processdator. Denna version: 10 januari Namn: Personnr: Datum: Godkänd: LINKÖPING
 Labb i industriella styrsystem Processdator Denna version: 10 januari 2013 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godkänd: Innehåll 1 Introduktion 4 1.1 Historik..............................
Labb i industriella styrsystem Processdator Denna version: 10 januari 2013 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godkänd: Innehåll 1 Introduktion 4 1.1 Historik..............................
Systemteknik/Processreglering F2
 Systemteknik/Processreglering F2 Processmodeller Stegsvarsmodeller PID-regulatorn Läsanvisning: Process Control: 1.4, 2.1 2.5 Processmodeller I den här kursen kommer vi att huvudsakligen att jobba med
Systemteknik/Processreglering F2 Processmodeller Stegsvarsmodeller PID-regulatorn Läsanvisning: Process Control: 1.4, 2.1 2.5 Processmodeller I den här kursen kommer vi att huvudsakligen att jobba med
TENTAMEN I REGLERTEKNIK TSRT03, TSRT19
 TENTAMEN I REGLERTEKNIK TSRT3, TSRT9 TID: 23 april 29, klockan 4-9 KURS: TSRT3, TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 5.3, 7.3 KURSADMINISTRATÖR:
TENTAMEN I REGLERTEKNIK TSRT3, TSRT9 TID: 23 april 29, klockan 4-9 KURS: TSRT3, TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, 7-339 BESÖKER SALEN: 5.3, 7.3 KURSADMINISTRATÖR:
Labb i industriella styrsystem. Processdator. Denna version: 13 april 2015. Namn: Personnr: Datum: Godknd: LINKÖPING
 Labb i industriella styrsystem Processdator Denna version: 13 april 2015 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godknd: Innehåll 1 Syfte och organisation 4 1.1 Laborationens syfte
Labb i industriella styrsystem Processdator Denna version: 13 april 2015 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godknd: Innehåll 1 Syfte och organisation 4 1.1 Laborationens syfte
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING
 TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING TID: 13 mars 2018, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 070-3113019 BESÖKER SALEN: 09.30,
TENTAMEN I DYNAMISKA SYSTEM OCH REGLERING TID: 13 mars 2018, klockan 8-12 KURS: TSRT21 PROVKOD: TEN1 INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Johan Löfberg, 070-3113019 BESÖKER SALEN: 09.30,
PID N7:0 N9:0 N9:2. PID-implementering i PLC. Laboration i industriella styrsystem. Denna version: 2 februari Namn: Personnr: Datum: Godkänd:
 Laboration i industriella styrsystem PID-implementering i PLC Denna version: 2 februari 2012 PID N7:0 N9:0 N9:2 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godkänd: Innehåll 1 Introduktion
Laboration i industriella styrsystem PID-implementering i PLC Denna version: 2 februari 2012 PID N7:0 N9:0 N9:2 REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godkänd: Innehåll 1 Introduktion
REGLERTEKNIK Laboration 5
 6 SAMPLADE SYSTEM 6. Sampling av signaler När man använder en dator som regulator, kan man endast behandla signaler i diskreta tidpunkter. T.ex. mäts systemets utsignal i tidpunkter med visst mellanrum,
6 SAMPLADE SYSTEM 6. Sampling av signaler När man använder en dator som regulator, kan man endast behandla signaler i diskreta tidpunkter. T.ex. mäts systemets utsignal i tidpunkter med visst mellanrum,
AUTOMATIC CONTROL REGLERTEKNIK LINKÖPINGS UNIVERSITET. M. Enqvist TTIT62: Föreläsning 2. Här är
 Martin Enqvist Återkoppling, PID-reglering, specifikationer Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(21) Exempel: Farthållare i en bil 4(21) Välj
Martin Enqvist Återkoppling, PID-reglering, specifikationer Reglerteknik Institutionen för systemteknik Linköpings universitet Repetition: Reglerproblemet 3(21) Exempel: Farthållare i en bil 4(21) Välj
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 216-8-19 Sal (1) (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal som
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 216-8-19 Sal (1) (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal som
Styr- och Reglerteknik för U3/EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071111/ Thomas Munther LABORATION 3 i Styr- och Reglerteknik för U3/EI2 Målsättning: Bekanta sig med olika processer.
Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071111/ Thomas Munther LABORATION 3 i Styr- och Reglerteknik för U3/EI2 Målsättning: Bekanta sig med olika processer.
Regulator. G (s) Figur 1: Blockdiagram för ett typiskt reglersystem
 Figur 1: Blockdiagram för ett typiskt reglersystem") Rs) + Σ Es) Regulator G s) R Us) Process G s) P Ys) Figur : Blockdiagram för ett typiskt reglersystem Något om PID-reglering PID-regulatorn består av proportionell del, integrerande del och deriverande
Rs) + Σ Es) Regulator G s) R Us) Process G s) P Ys) Figur : Blockdiagram för ett typiskt reglersystem Något om PID-reglering PID-regulatorn består av proportionell del, integrerande del och deriverande
PID-regulatorer och öppen styrning
 Reglerteknik grk Lab 1 PID-regulatorer och öppen styrning Denna version: Oktober 2011 P I D REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godkänd: 1 Inledning Syftet med den här laborationen
Reglerteknik grk Lab 1 PID-regulatorer och öppen styrning Denna version: Oktober 2011 P I D REGLERTEKNIK Namn: Personnr: AUTOMATIC LINKÖPING CONTROL Datum: Godkänd: 1 Inledning Syftet med den här laborationen
REGLERTEKNIK Laboration 3
 Lunds Tekniska Högskola Avdelningen för Industriell Elektroteknik och Automation LTH Ingenjörshögskolan vid Campus Helsingborg REGLERTEKNIK Laboration 3 Modellbygge och beräkning av PID-regulator Inledning
Lunds Tekniska Högskola Avdelningen för Industriell Elektroteknik och Automation LTH Ingenjörshögskolan vid Campus Helsingborg REGLERTEKNIK Laboration 3 Modellbygge och beräkning av PID-regulator Inledning
Reglerteknik AK. Tentamen 9 maj 2015 kl 08 13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 9 maj 5 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt 5 poäng.
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 9 maj 5 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt 5 poäng.
Styr- och Reglerteknik för U3/EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071118/ Thomas Munther LABORATION 4 i Styr- och Reglerteknik för U3/EI2 Målsättning: Använda tumregler för att ställa
Högskolan i Halmstad Sektionen för Informationsvetenskap, Dator- och Elektroteknik 071118/ Thomas Munther LABORATION 4 i Styr- och Reglerteknik för U3/EI2 Målsättning: Använda tumregler för att ställa
Reglerteknik 1. Kapitel 1, 2, 3, 4. Köp bok och övningshäfte på kårbokhandeln. William Sandqvist william@kth.se
 Reglerteknik 1 Kapitel 1, 2, 3, 4 Köp bok och övningshäfte på kårbokhandeln Reglerteknik 1. Givare för yttertemperatur 2, 3. Givare för inomhustemperaturer Behaglig innetemperatur med hjälp av reglerteknik!
Reglerteknik 1 Kapitel 1, 2, 3, 4 Köp bok och övningshäfte på kårbokhandeln Reglerteknik 1. Givare för yttertemperatur 2, 3. Givare för inomhustemperaturer Behaglig innetemperatur med hjälp av reglerteknik!
F13: Regulatorstrukturer och implementering
 Föreläsning 2 PID-reglering Förra föreläsningen F3: Regulatorstrukturer och implementering 25 Februari, 209 Lunds Universitet, Inst för Reglerteknik. Bodediagram för PID-regulator 2. Metoder för empirisk
Föreläsning 2 PID-reglering Förra föreläsningen F3: Regulatorstrukturer och implementering 25 Februari, 209 Lunds Universitet, Inst för Reglerteknik. Bodediagram för PID-regulator 2. Metoder för empirisk
Tentamen i Systemteknik/Processreglering
 Institutionen för REGLERTEKNIK Tentamen i Systemteknik/Processreglering 27 maj 2 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
Institutionen för REGLERTEKNIK Tentamen i Systemteknik/Processreglering 27 maj 2 kl 4 9 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar
Modellering av en Tankprocess
 UPPSALA UNIVERSITET SYSTEMTEKNIK EKL och PSA 2002, AR 2004, BC2009 Modellering av dynamiska system Modellering av en Tankprocess Sammanfattning En tankprocess modelleras utifrån kända fysikaliska relationer.
UPPSALA UNIVERSITET SYSTEMTEKNIK EKL och PSA 2002, AR 2004, BC2009 Modellering av dynamiska system Modellering av en Tankprocess Sammanfattning En tankprocess modelleras utifrån kända fysikaliska relationer.
Tentamen i Reglerteknik, för D2/E2/T2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Lördagen den 15 Augusti kl.9.-13. 29 Sal: Tillåtna hjälpmedel: Valfri
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Lördagen den 15 Augusti kl.9.-13. 29 Sal: Tillåtna hjälpmedel: Valfri
övningstentamen I DYNAMISKA SYSTEM OCH REGLERING
 övningstentamen I DYNAMISKA SYSTEM OCH REGLERING SAL: - TID: mars 27, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 73-9699 BESÖKER SALEN:
övningstentamen I DYNAMISKA SYSTEM OCH REGLERING SAL: - TID: mars 27, klockan 8-2 KURS: TSRT2 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANSVARIG LÄRARE: Inger Erlander Klein, 73-9699 BESÖKER SALEN:
REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN
 AV REGLERTEKNIKEN") REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN Automatisk styra processer. Generell metodik Bengt Carlsson Huvudantagande: Processen kan påverkas med en styrsignal (insignal). Normalt behöver man kunna mäta
REPETITION (OCH LITE NYTT) AV REGLERTEKNIKEN Automatisk styra processer. Generell metodik Bengt Carlsson Huvudantagande: Processen kan påverkas med en styrsignal (insignal). Normalt behöver man kunna mäta
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24-4-22 Sal () TER2,TER3,TERF (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 24-4-22 Sal () TER2,TER3,TERF (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
TENTAMEN I REGLERTEKNIK I
 TENTAMEN I REGLERTEKNIK I SAL: TER2 TID: 6 mars 2, klockan 8-3 KURS: TSRT9, Reglerteknik I PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 9 ANSVARIG
TENTAMEN I REGLERTEKNIK I SAL: TER2 TID: 6 mars 2, klockan 8-3 KURS: TSRT9, Reglerteknik I PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 9 ANSVARIG
Lösningar till tentamen i Industriell reglerteknik TSRT07 Tentamensdatum: Martin Enqvist
 ösningar till tentamen i Industriell reglerteknik TSRT7 Tentamensdatum: 28-3-2 Martin Enqvist a) Z-transformering av sambanden som beskriver den tidsdiskreta regulatorn ger Iz) = KT Sz T i z ) Ez) = Kz
ösningar till tentamen i Industriell reglerteknik TSRT7 Tentamensdatum: 28-3-2 Martin Enqvist a) Z-transformering av sambanden som beskriver den tidsdiskreta regulatorn ger Iz) = KT Sz T i z ) Ez) = Kz
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-6-7 Sal () TER2 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-6-7 Sal () TER2 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 214-1-24 Sal (1) TER1,TER2,TERE (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 214-1-24 Sal (1) TER1,TER2,TERE (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2015-06-08 Sal (1) TER 2, TER 3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2015-06-08 Sal (1) TER 2, TER 3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
TENTAMEN I REGLERTEKNIK Y TSRT12 för Y3 och D3. Lycka till!
 TENTAMEN I REGLERTEKNIK Y TSRT2 för Y3 och D3 TID: 7 mars 25, klockan 4-9. ANSVARIGA LÄRARE: Mikael Norrlöf, tel 28 27 4, Anna Hagenblad, tel 28 44 74 TILLÅTNA HJÄLPMEDEL: Läroboken Glad-Ljung: Reglerteknik,
TENTAMEN I REGLERTEKNIK Y TSRT2 för Y3 och D3 TID: 7 mars 25, klockan 4-9. ANSVARIGA LÄRARE: Mikael Norrlöf, tel 28 27 4, Anna Hagenblad, tel 28 44 74 TILLÅTNA HJÄLPMEDEL: Läroboken Glad-Ljung: Reglerteknik,
Reglerteknik AK, FRT010
 Institutionen för REGLERTEKNIK Reglerteknik AK, FRT Tentamen januari 27 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK, FRT Tentamen januari 27 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Industriell reglerteknik: Föreläsning 4
 Föreläsningar / 25 Industriell reglerteknik: Föreläsning 4 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Föreläsningar / 25 Industriell reglerteknik: Föreläsning 4 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
PID-regulatorn. Föreläsning 9. Frekvenstolkning av PID-regulatorn. PID-regulatorns Bodediagram
 PID-regulatorn Frekvenstolkning Inställningsmetoder Manuell inställning Ziegler Nichols metoder Modellbaserad inställning Praktiska modifieringar Standardkretsar Föreläsning 9 Rekommenderad läsning: Process
PID-regulatorn Frekvenstolkning Inställningsmetoder Manuell inställning Ziegler Nichols metoder Modellbaserad inställning Praktiska modifieringar Standardkretsar Föreläsning 9 Rekommenderad läsning: Process
Föreläsning 3. Reglerteknik AK. c Bo Wahlberg. 9 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 3 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 9 september 2013 Introduktion Förra gången: PID-reglering Dagens program: Stabilitet Rotort
Föreläsning 3 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 9 september 2013 Introduktion Förra gången: PID-reglering Dagens program: Stabilitet Rotort
Tentamen i Reglerteknik, 4p för D2/E2/T2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, 4p för D2/E2/T2 Tid: Måndagen den 28 maj kl.9.-13. 27 Sal: R1122 Tillåtna hjälpmedel: Valfri
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, 4p för D2/E2/T2 Tid: Måndagen den 28 maj kl.9.-13. 27 Sal: R1122 Tillåtna hjälpmedel: Valfri
Föreläsning 1 Reglerteknik AK
 Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
/TFE CJ, BT, BaE
 05-10-23/TFE CJ, BT, BaE Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet Målsättning Målet med denna laboration är att visa hur PID-reglering
05-10-23/TFE CJ, BT, BaE Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet Målsättning Målet med denna laboration är att visa hur PID-reglering
LAB 4. ORDINÄRA DIFFERENTIALEKVATIONER. 1 Inledning. 2 Eulers metod och Runge-Kuttas metod
 TANA21+22/ 30 september 2016 LAB 4. ORDINÄRA DIFFERENTIALEKVATIONER 1 Inledning Vi skall studera begynnelsevärdesproblem, både med avseende på stabilitet och noggrannhetens beroende av steglängden. Vi
TANA21+22/ 30 september 2016 LAB 4. ORDINÄRA DIFFERENTIALEKVATIONER 1 Inledning Vi skall studera begynnelsevärdesproblem, både med avseende på stabilitet och noggrannhetens beroende av steglängden. Vi
G(s) = 5s + 1 s(10s + 1)
 = 5s + 1 s(10s + 1)") Projektuppgift 1: Integratoruppvridning I kursen behandlas ett antal olika typer av olinjäriteter som är mer eller mindre vanligt förekommande i reglersystem. En olinjäritet som dock alltid förekommer
Projektuppgift 1: Integratoruppvridning I kursen behandlas ett antal olika typer av olinjäriteter som är mer eller mindre vanligt förekommande i reglersystem. En olinjäritet som dock alltid förekommer
INLÄMNINGSUPPGIFT I. REGLERTEKNIK I för STS3 & X4
 SYSTEMTEKNIK, IT-INSTITUTIONEN UPPSALA UNIVERSITET DZ 2015-09 INLÄMNINGSUPPGIFTER REGLERTEKNIK I för STS3 & X4 INLÄMNINGSUPPGIFT I Inlämning: Senast fredag den 2:a oktober kl 15.00 Lämnas i fack nr 30,
SYSTEMTEKNIK, IT-INSTITUTIONEN UPPSALA UNIVERSITET DZ 2015-09 INLÄMNINGSUPPGIFTER REGLERTEKNIK I för STS3 & X4 INLÄMNINGSUPPGIFT I Inlämning: Senast fredag den 2:a oktober kl 15.00 Lämnas i fack nr 30,
Industriell reglerteknik: Föreläsning 6
 Föreläsningar 1 / 15 Industriell reglerteknik: Föreläsning 6 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Föreläsningar 1 / 15 Industriell reglerteknik: Föreläsning 6 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Välkomna till TSRT19 Reglerteknik Föreläsning 3. Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula
 Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Välkomna till TSRT19 Reglerteknik Föreläsning 3 Sammanfattning av föreläsning 2 PID-reglering Blockschemaräkning Reglerdesign för svävande kula Sammanfattning av förra föreläsningen 2 Vi modellerar system
Teori Se din kursbok under avsnitt PID-reglering, Ziegler-Nichols metod och olinjära system (avsnitt 7.7 i Modern Reglerteknik av Bertil Thomas).
.") 03-10-14/TFE CJ, BT, BaE, SG Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet PID - NIVÅREGLERING AV TANK Målsättning Målet med denna laboration
03-10-14/TFE CJ, BT, BaE, SG Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet PID - NIVÅREGLERING AV TANK Målsättning Målet med denna laboration
Välkomna till TSRT19 Reglerteknik Föreläsning 8. Sammanfattning av föreläsning 7 Framkoppling Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
Lösningsförslag till tentamen i Reglerteknik (TSRT19)
") Lösningsförslag till tentamen i Reglerteknik (TSRT9) 26-3-6. (a) Systemet är stabilt och linjärt. Därmed kan principen sinus in, sinus ut tillämpas. Givet insignalen u(t) sin (t) sin ( t) har vi G(i )
Lösningsförslag till tentamen i Reglerteknik (TSRT9) 26-3-6. (a) Systemet är stabilt och linjärt. Därmed kan principen sinus in, sinus ut tillämpas. Givet insignalen u(t) sin (t) sin ( t) har vi G(i )
Exempel: reglering av en plattreaktor. Varför systemteknik/processreglering? Blockdiagram. Blockdiagram för en (del)process. Exempel: tankprocess
process. Exempel: tankprocess") Systemteknik/reglering Föreläsning Vad är systemteknik oc reglerteknik? Blockdiagram Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling PID-reglering Läsanvisning: Control:..3 Vad
Systemteknik/reglering Föreläsning Vad är systemteknik oc reglerteknik? Blockdiagram Styrstrategier Öppen styrning, framkoppling Sluten styrning, återkoppling PID-reglering Läsanvisning: Control:..3 Vad
En översikt av Kap 7. Tillbakablick, återkoppling Informationsteknologi Reglering av vätskenivån i en tank. Framkoppling. Informationsteknologi
 Bengt Carlsson Avd f... och även i reningsverk En översikt av Kap 7 Tekniken i Kap 7 är vanlig i många industriella tillämpningar (t ex kärnkraftver och för klimatreglering i byggnader llbakablick, återkoppling
Bengt Carlsson Avd f... och även i reningsverk En översikt av Kap 7 Tekniken i Kap 7 är vanlig i många industriella tillämpningar (t ex kärnkraftver och för klimatreglering i byggnader llbakablick, återkoppling
vt 04 Teori Se din kursbok under avsnitt PID-reglering, Ziegler-Nichols metod och olinjära system.
 vt 04 Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet PID - NIVÅREGLERING AV TANK Målsättning Målet med denna laboration är att visa hur PID-reglering
vt 04 Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet PID - NIVÅREGLERING AV TANK Målsättning Målet med denna laboration är att visa hur PID-reglering
Simulering och reglerteknik för kemister
 Simulering och reglerteknik för kemister Gå till http://techteach.no/kybsim/index_eng.htm och gå igenom några av följande exempel. http://techteach.no/kybsim/index_eng.htm Följ gärna de beskrivningarna
Simulering och reglerteknik för kemister Gå till http://techteach.no/kybsim/index_eng.htm och gå igenom några av följande exempel. http://techteach.no/kybsim/index_eng.htm Följ gärna de beskrivningarna
TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT62
 TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT6 Tid: Fredagen den 4 mars 8, kl 4.-8. Lokal: TER Ansvariga lärare: Inger Klein, 8 665 eller 73-96 99, Mikael Aslund, tel 8668 eller 77-4846 Hjälpmedel: Tabeller,
TENTAMEN I REALTIDSPROCESSER OCH REGLERING TTIT6 Tid: Fredagen den 4 mars 8, kl 4.-8. Lokal: TER Ansvariga lärare: Inger Klein, 8 665 eller 73-96 99, Mikael Aslund, tel 8668 eller 77-4846 Hjälpmedel: Tabeller,
Tentamen i Styr- och Reglerteknik, för U3 och EI2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 12 Augusti kl. 9-13, 29 Sal: - Tillåtna hjälpmedel:
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Styr- och Reglerteknik, för U3 och EI2 Tid: Onsdagen den 12 Augusti kl. 9-13, 29 Sal: - Tillåtna hjälpmedel:
TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 10
 TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 10 Johan Löfberg Avdelningen för Reglerteknik Institutionen för systemteknik johan.lofberg@liu.se Kontor: B-huset, mellan ingång 27 och 29
TSRT21 Dynamiska system och reglering Välkomna till Föreläsning 10 Johan Löfberg Avdelningen för Reglerteknik Institutionen för systemteknik johan.lofberg@liu.se Kontor: B-huset, mellan ingång 27 och 29
Exempelsamling Grundläggande systemmodeller. Klas Nordberg Computer Vision Laboratory Department of Electrical Engineering Linköping University
 Exempelsamling Grundläggande systemmodeller Klas Nordberg Computer Vision Laboratory Department of Electrical Engineering Linköping University Version: 0.11 September 14, 2015 Uppgifter markerade med (A)
Exempelsamling Grundläggande systemmodeller Klas Nordberg Computer Vision Laboratory Department of Electrical Engineering Linköping University Version: 0.11 September 14, 2015 Uppgifter markerade med (A)
Systemteknik/Processreglering F6
 Systemteknik/Processreglering F6 Linjärisering Återkopplade system ett exempel Läsanvisning: Process Control: 5.5, 6.1 Jämviktspunkter Olinjär process på tillståndsform: dx = f (x, u) dt y = (x, u) Processens
Systemteknik/Processreglering F6 Linjärisering Återkopplade system ett exempel Läsanvisning: Process Control: 5.5, 6.1 Jämviktspunkter Olinjär process på tillståndsform: dx = f (x, u) dt y = (x, u) Processens
Signaler och reglersystem Kapitel 1-4. Föreläsning 1, Inledning Reglerteknik
 Signaler och reglersystem Kapitel 1-4 Föreläsning 1, Inledning Reglerteknik 1 Lärare Leif Lindbäck leifl@kth.se Tel 08 790 44 25 Jan Andersson janande@kth.se Tel i Kista 08 790 444 9 Tel i Flemingsberg
Signaler och reglersystem Kapitel 1-4 Föreläsning 1, Inledning Reglerteknik 1 Lärare Leif Lindbäck leifl@kth.se Tel 08 790 44 25 Jan Andersson janande@kth.se Tel i Kista 08 790 444 9 Tel i Flemingsberg
A. Stationära felet blir 0. B. Stationära felet blir 10 %. C. Man kan inte avgöra vad stationära felet blir enbart med hjälp av polerna.
 Man använder en observatör för att skatta tillståndsvariablerna i ett system, och återkopplar sedan från det skattade tillståndet. Hur påverkas slutna systemets överföringsfunktion om man gör observatören
Man använder en observatör för att skatta tillståndsvariablerna i ett system, och återkopplar sedan från det skattade tillståndet. Hur påverkas slutna systemets överföringsfunktion om man gör observatören
Reglerteknik AK. Tentamen 24 oktober 2016 kl 8-13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
SIMULINK. En kort introduktion till. Polplacerad regulator sid 8 Appendix Symboler/block sid 10. Institutionen för Tillämpad Fysik och elektronik
 Institutionen för Tillämpad Fysik och elektronik Umeå Universitet BE, BT Version: 5/ -09 DMR En kort introduktion till SIMULINK Polplacerad regulator sid 8 Appendix Symboler/block sid 0 Introduktion till
Institutionen för Tillämpad Fysik och elektronik Umeå Universitet BE, BT Version: 5/ -09 DMR En kort introduktion till SIMULINK Polplacerad regulator sid 8 Appendix Symboler/block sid 0 Introduktion till
TENTAMEN Reglerteknik 3p, X3
 OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 3p. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 3p. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
TSRT91 Reglerteknik: Föreläsning 2
 Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Industriell reglerteknik: Föreläsning 3
 Industriell reglerteknik: Föreläsning 3 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 19 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Industriell reglerteknik: Föreläsning 3 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 19 1 Sekvensstyrning: Funktionsdiagram, Grafcet. 2 Grundläggande
Reglerteknik I: F1. Introduktion. Dave Zachariah. Inst. Informationsteknologi, Avd. Systemteknik
 Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars
Reglerteknik I: F1 Introduktion Dave Zachariah Inst. Informationsteknologi, Avd. Systemteknik 1 / 14 Vad är reglerteknik? Läran om dynamiska system och deras styrning. System = Process = Ett objekt vars
TENTAMEN I TSRT19 REGLERTEKNIK
 SAL: XXXXX TENTAMEN I TSRT9 REGLERTEKNIK TID: 25-8-2 kl. 8:-3: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Inger Erlander Klein, tel. 3-28665,73-9699 BESÖKER
SAL: XXXXX TENTAMEN I TSRT9 REGLERTEKNIK TID: 25-8-2 kl. 8:-3: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Inger Erlander Klein, tel. 3-28665,73-9699 BESÖKER
TENTAMEN Reglerteknik 4.5hp X3
 OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 4.5hp. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans
OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 4.5hp. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER, TER 2, TER E TID: 4 mars 208, klockan 8-3 KURS: TSRT2, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
TENTAMEN I REGLERTEKNIK Y/D SAL: TER, TER 2, TER E TID: 4 mars 208, klockan 8-3 KURS: TSRT2, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
Tentamen i Reglerteknik, för D2/E2/T2
 Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Torsdagen den 3 Juni kl.9.-13. 21 Sal: R1122 Tillåtna hjälpmedel: Valfri
Högskolan i Halmstad Sektionen för Informationsvetenskap, Data- och Elektroteknik (IDE) Tentamen i Reglerteknik, för D2/E2/T2 Tid: Torsdagen den 3 Juni kl.9.-13. 21 Sal: R1122 Tillåtna hjälpmedel: Valfri
A
 Lunds Universitet LTH Ingenjorshogskolan i Helsingborg Tentamen i Reglerteknik 2008{05{29. Ett system beskrivs av foljande in-utsignalsamband: dar u(t) ar insignal och y(t) utsignal. d 2 y dt 2 + dy du
Lunds Universitet LTH Ingenjorshogskolan i Helsingborg Tentamen i Reglerteknik 2008{05{29. Ett system beskrivs av foljande in-utsignalsamband: dar u(t) ar insignal och y(t) utsignal. d 2 y dt 2 + dy du
TENTAMEN I TSRT91 REGLERTEKNIK
 SAL: TER3 TENTAMEN I TSRT9 REGLERTEKNIK TID: 28-4-3 kl. 4: 9: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 7-69294 BESÖKER SALEN: cirka
SAL: TER3 TENTAMEN I TSRT9 REGLERTEKNIK TID: 28-4-3 kl. 4: 9: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 7-69294 BESÖKER SALEN: cirka
Industriella styrsystem
 DNR LIU-2018-02499 1(5) Industriella styrsystem Programkurs 4 hp Automatic Control, Advanced Course TSIU04 Gäller från: 2019 VT Fastställd av Programnämnden för elektroteknik, fysik och matematik, EF Fastställandedatum
DNR LIU-2018-02499 1(5) Industriella styrsystem Programkurs 4 hp Automatic Control, Advanced Course TSIU04 Gäller från: 2019 VT Fastställd av Programnämnden för elektroteknik, fysik och matematik, EF Fastställandedatum