Maskinorienterad programmering
|
|
|
- Carl-Johan Bengt Olofsson
- för 6 år sedan
- Visningar:
Transkript
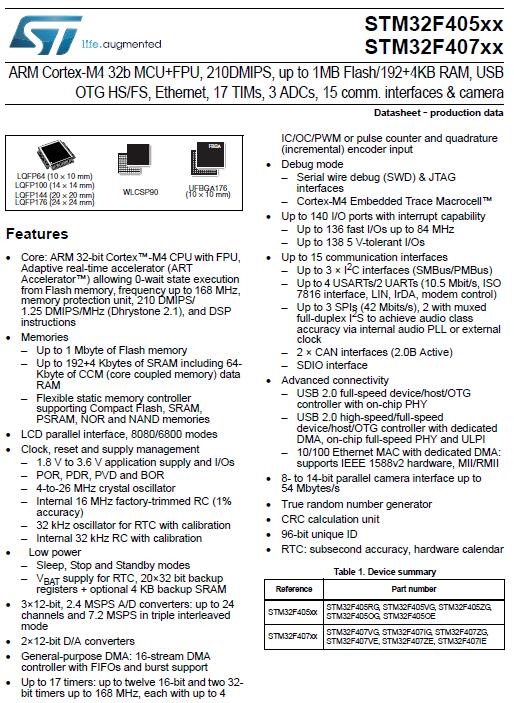
1 Undantagshantering och interna avbrott ARM Cortex-M4 exceptions, programmering av undantagshantering Ur innehållet: Faults Software traps Avbrott från interna enheter, Systick Läsanvisningar: Arbetsbok kap 7 STM32F4xx Cortex M4 programming manual Kap 2.3 Exception model SCB, sidor Undantagshantering och interna avbrott 1
2 Undantagshantering Maskinorienterad programmering Undantagshantering är det sammanfattande begreppet för när normel sekventiell exekvering inte kan, eller ska, fortsätta. Detta är föranlett av någon exceptionell händelse i systemet. Ett inledande exempel på undantagshantering: Vi vet att ARM-processor inte kan referera word (4 bytes) på en udda address. Men vi kan enkelt skriva ett program som gör det, vad händer exception_unhandled.asm start: LDR R0,=0x LDR R0,[R0] NOP void main(void) { int *ip, i; ip = (int *) 0x ; i = *ip; } Undantagshantering och interna avbrott 2
3 Undantagshantering - "exception" Med undantag menar vi här en rad olika typer av händelser: RESET (återstart): power on (kallstart ) warm reset (varmstart FAULT: Exekveringsfel kan inte fortsätta TRAP: Programmerat avbrott, initierat av maskininstruktion INTERRUPT: Hårdvarusignalerat avbrott Undantagshantering och interna avbrott 3
4 Undantagstyper De olika undantagstyperna har en naturlig, fallande prioritet RESET: power on (kallstart) warm reset (varmstart) NMI: Non Maskable Interrupt FAULT: Hard fault generellt fel Memory management fault fel användning av minne Bus fault exvis obefintligt minne Usage fault exvis unaligned TRAP: SVC- instruktion BPKT-instruktion... INTERRUPT: INTERNA: SysTick Watchdog Periferikretsar... EXTERNA: IO-pinnar kan konfigureras som avbrottsingångar EXTI (External Interrupt) modul Undantagshantering och interna avbrott 4
5 Exekvering vid undantag main 5 main 4 RESET-hantering Undantagshantering 1 0x04 0x00 RESET-vektor Initialvärde för MSP 1. Återstart (Reset aktiverad) 2. Ladda MSP (Main Stack Pointer) från adress 0x00 3. Ladda RESET-vector från adress 0x04 4. RESET-hantering exekveras i Thread mode 5. Systemets huvudprogram startas 2 3 R13 (MSP) Undantagsvektor 1. Något undantag inträffar Pågående instruktion utförs klart Vektortabellen adresseras 2. Den specifika undantagsvektorn hämtas 3. Undantagshantering i Handler Mode 4. Återgång efter undantagshantering 2 Undantagshantering och interna avbrott 5

6 Vektortabellen Anger position för de olika undantagsvektorerna. De 16 första positionerna är samma för alla Cortex-M4. Resten av tabellen är specifik för den aktuella microcontrollern. Undantagshantering och interna avbrott 6
7 Undantagshantering - detaljerna Inträdet hanteras automatiskt av processor. Utträdet initieras och handhas av programvaran (undantagsrutinen) Utträde: Återställ PC från LR. Det speciella EXC_RETURN värdet som då hamnar i PC avkodas. Registerinnehåll återställls då från stacken varvid PC får rätt återhoppsadress. Inträde: Spara aktuell processorstatus, dvs. Spara registerinnehåll på stacken Sätt nytt speciellt innehåll i LR (EXC_RETURN) baserat på processorstatus Ändra processorstatus för undantagshantering Sätt undantagsnummer i PSR Placera undantagsvektor i PC Undantagshantering och interna avbrott 7
8 Relokering av vektortabellen Vektortabellen startar på address 0 i minnet (Alltid RO-minne) men kan relokeras så att vektorerna hamnar i RWM, exempelvis: #define SCB_VTOR (unsigned long *)0xE000ED08) *SCB_VTOR = 0x2001C000; EXEMPEL: Initiera avbrottsvektor usage fault void usage_fault_handler( void );... *((void (**)(void) ) 0x2001C018 ) = usage_fault_handler; Undantagshantering och interna avbrott 8
9 Återgång från avbrott Värdet i LR (EXC_RETURN) anger detaljerna för återställning av stack och PC efter avbrott Flyttal aktiverat Flyttal ej aktiverat Åter till handler mode använd main stack 0xFFFFFFE1 0xFFFFFFF1 Åter till thread mode använd main stack 0xFFFFFFE9 0xFFFFFFF9 Åter till thread mode använd process stack 0xFFFFFFED 0xFFFFFFFD Kan återvända från avbrott med följande instruktioner då PC laddas med det magiska värdet 0xFFFF_FFFX LDR PC,.. LDM/POP då PC ingår i registerlistan BX LR mest vanligt, typiskt retur från en subrutin Om inga ytterligare avbrott avvaktar: återställs stack och tillstånd baserat på EXC_RETURN Om avbrott avvaktar: återställning av stack/tillstånd fördröjs ( tail-chaining ) avvaktande avbrott betjänas Undantagshantering och interna avbrott 9
10 Avbrottsprioritet Flera avbrott, pending, active och prioriteter Avbrott 2 har högre prioritet, ytterligare context switch Avbrott 2 har lägre prioritet, tail-chained interrupt Undantagshantering och interna avbrott 10
11 Speciella register Speciella register används för att ange: Om flyttalsprocessor ska aktiveras Vilken stack som används Vilken exekverings-mode som används Om avbrott ska betjänas EXEMPEL: void setcontrol( unsigned int val) { asm( " MSR CONTROL,R0\n" ); } Undantagshantering och interna avbrott 11
12 Maskera undantag I undantagsrutinen kan man tillfälligt höja den egna prioriteten till högsta nivå genom att sätta prioritetsmasken i PRIMASK till 1. void disable_interrupt( void ) attribute ((naked)); void disable_interrupt( void ) { asm( " CPSID I\n" ); } Undantagsrutinen måste då också återställa prioritetsmasken till 0 innan återgång. I annat fall kommer alla framtida avbrott att blockeras. Undantagshantering och interna avbrott 12
13 Processorns olika tillstånd Handler (undantagshantering)/thread mode (normal exekvering), sköts automatiskt av processorn. För att underlätta konstruktion av operativsystem finns också: Privileged/Non-privileged state, kan programmeras. I Non-priveleged state fungerar priviligierade instruktioner som NOP. privileged (kernel, supervisor) Main stack/process stack kan programmeras, processorn använder olika fysiska register (MSP eller PSP) som stackpekare. Operativsystemets programvara (kernel) exekveras med alla resurser tillgängliga (priviligierat). undantag kernel startar process Applikationsprogrammet exekveras i en begänsad miljö (icke priviligierat), övervakad av kernel. non privileged (task, process) Undantagshantering och interna avbrott 13
14 Stacken i avbrottsfunktionen Ej aktiverad flyttalsenhet Före avbrott Processorn fyller automatiskt ut med 4 bytes om detta skulle krävas för att SP ska innehålla adress på adress jämnt delbar med 8. Detta indikeras med att bit9 i PSR sätts till 1. Undantagshantering och interna avbrott 14


15 Interna avbrott Undantagshantering och interna avbrott 15
16 EXEMPEL: Avbrott från SysTick Skapa en fördröjningsfunktion som räknar ner en global variabel ( meddelande ). Visa hur ett testprogram kan använda funktionen för att åstadkomma time out i en bunden programslinga. Testprogrammet ska tända en diodramp under den tid time-out varar. Vi löser på tavlan... void main(void) { init_app(); *((void (**)(void) ) 0x2001C03C ) = systick_irq_handler; *GPIO_ODR_LOW = 0; delay( DELAY_COUNT ); *GPIO_ODR_LOW = 0xFF; while(1) { if( delay_count == 0) break; /* Här finns den kod som väntar på time-out */ } *GPIO_ODR_LOW = 0; } Undantagshantering och interna avbrott 16
Maskinorienterad programmering
 Undantagshantering och interna avbrott ARM Cortex-M4 exceptions, programmering av undantagshantering Ur innehållet: Faults Software traps Avbrott från interna enheter, Systick Läsanvisningar: Arbetsbok
Undantagshantering och interna avbrott ARM Cortex-M4 exceptions, programmering av undantagshantering Ur innehållet: Faults Software traps Avbrott från interna enheter, Systick Läsanvisningar: Arbetsbok
Programmering av inbyggda system
 Avbrott och undantag Ur innehållet: Cortex M4 "exceptions" Avbrott NVIC Externa avbrott: Avbrottsvippa Läsanvisningar: Arbetsbok kap 7 IRQ Flip-Flop STM32F4xx Cortex M4 programming manual Kap 2.3 Exception
Avbrott och undantag Ur innehållet: Cortex M4 "exceptions" Avbrott NVIC Externa avbrott: Avbrottsvippa Läsanvisningar: Arbetsbok kap 7 IRQ Flip-Flop STM32F4xx Cortex M4 programming manual Kap 2.3 Exception
Maskinorienterad programmering
 Externa avbrott Anslutning av extern avbrottsvippa, programmering med konfigurering och hantering av externa avbrott. Introduktion till time-sharing, enkel task-switch. Ur innehållet: NVIC och EXTI (SYSCFG)
Externa avbrott Anslutning av extern avbrottsvippa, programmering med konfigurering och hantering av externa avbrott. Introduktion till time-sharing, enkel task-switch. Ur innehållet: NVIC och EXTI (SYSCFG)
F8: Undantagshantering
 F8: Undantagshantering Undantagshantering i 68 Vad är ett undantag? Typer av undantag Att skriva undantagsrutiner Undantagshantering, vad och varför? Exempel: Ett system ska mäta temperatur var :e sekund
F8: Undantagshantering Undantagshantering i 68 Vad är ett undantag? Typer av undantag Att skriva undantagsrutiner Undantagshantering, vad och varför? Exempel: Ett system ska mäta temperatur var :e sekund
Svar till Övning3 Datorteknik, HH vt12 Avbrott och timers
 Svar till Övning3 Datorteknik, HH vt12 Avbrott och timers Avbrott generellt F7.1. Avbrott sköts med hårdvara i processorn, man läser av hårdvarumässigt. Polling är en enklare princip för I/O- hantering.
Svar till Övning3 Datorteknik, HH vt12 Avbrott och timers Avbrott generellt F7.1. Avbrott sköts med hårdvara i processorn, man läser av hårdvarumässigt. Polling är en enklare princip för I/O- hantering.
Assemblerprogrammering del 3
 Assemblerprogrammering del 3 Dagens föreläsning behandlar: Kompendiet kapitel 9 och 10.4 Arbetsboken kapitel 16 Ur innehållet: Modularisering, subrutiner och strukturerad programutveckling (flödesdiagram)
Assemblerprogrammering del 3 Dagens föreläsning behandlar: Kompendiet kapitel 9 och 10.4 Arbetsboken kapitel 16 Ur innehållet: Modularisering, subrutiner och strukturerad programutveckling (flödesdiagram)
Datorteknik. Tomas Nordström. Föreläsning 7 Avbrott. För utveckling av verksamhet, produkter och livskvalitet.
 Datorteknik Tomas Nordström Föreläsning 7 Avbrott För utveckling av verksamhet, produkter och livskvalitet. Föreläsning 7 Avbrott References: [SUM3U-complete] ATMEL AT91SAM ARM-based Flash MCU - SAM3U
Datorteknik Tomas Nordström Föreläsning 7 Avbrott För utveckling av verksamhet, produkter och livskvalitet. Föreläsning 7 Avbrott References: [SUM3U-complete] ATMEL AT91SAM ARM-based Flash MCU - SAM3U
Digital- och datorteknik
 Digital- och datorteknik Föreläsning #19 Biträdande professor Jan Jonsson Institutionen för data- och informationsteknik Chalmers tekniska högskola Normaltillstånd vs undantagstillstånd I normaltillstånd
Digital- och datorteknik Föreläsning #19 Biträdande professor Jan Jonsson Institutionen för data- och informationsteknik Chalmers tekniska högskola Normaltillstånd vs undantagstillstånd I normaltillstånd
Datorteknik. Tomas Nordström. Föreläsning 6. För utveckling av verksamhet, produkter och livskvalitet.
 Datorteknik Tomas Nordström Föreläsning 6 För utveckling av verksamhet, produkter och livskvalitet. Föreläsning 6 Vad händer vid uppstart SoC och Kringkretsar, PIO Programmering i Assembler Lab2 genomgång
Datorteknik Tomas Nordström Föreläsning 6 För utveckling av verksamhet, produkter och livskvalitet. Föreläsning 6 Vad händer vid uppstart SoC och Kringkretsar, PIO Programmering i Assembler Lab2 genomgång
Undantag, avbrott. Avsnitt 7. Undantag, avbrott
 Undantag, avbrott Avsnitt 7 Undantag, avbrott Inledning Processorn befinner sig normalt i Threade-mode, utförandes ett program. Om något exceptionellt inträffar, kallar vi detta ett undantag. Eftersom
Undantag, avbrott Avsnitt 7 Undantag, avbrott Inledning Processorn befinner sig normalt i Threade-mode, utförandes ett program. Om något exceptionellt inträffar, kallar vi detta ett undantag. Eftersom
Fö 5+6 TSEA81. Real-time kernel + Real-time OS
 Fö 5+6 TSEA81 Real-time kernel + Real-time OS Stackens användningsområde * JSR / RTS : returadress * Temporärdata (push / pop) void myfunc(void) { int i; // hamnar nog i register int test[10]; // hamnar
Fö 5+6 TSEA81 Real-time kernel + Real-time OS Stackens användningsområde * JSR / RTS : returadress * Temporärdata (push / pop) void myfunc(void) { int i; // hamnar nog i register int test[10]; // hamnar
Assemblerprogrammering, ARM-Cortex M4 del 3
 Assemblerprogrammering, ARM-Cortex M4 del 3 Ur innehållet: Fler pekartyper Användning av stacken Lagringsklasser, synlighet - lokala variabler Funktioner - returvärden och parametrar Läsanvisningar: Arbetsbok
Assemblerprogrammering, ARM-Cortex M4 del 3 Ur innehållet: Fler pekartyper Användning av stacken Lagringsklasser, synlighet - lokala variabler Funktioner - returvärden och parametrar Läsanvisningar: Arbetsbok
GPIO - General Purpose Input Output
 GPIO - General Purpose Input Output Ur innehållet: Digital IO Ideala och verkliga signaler Bitvis in- och utmatning Anslutning - fysiskt gränssnitt F407 - GPIO-modul tillämpningar Programmering av enkelt
GPIO - General Purpose Input Output Ur innehållet: Digital IO Ideala och verkliga signaler Bitvis in- och utmatning Anslutning - fysiskt gränssnitt F407 - GPIO-modul tillämpningar Programmering av enkelt
Digital- och datorteknik
 Digital- och datorteknik Föreläsning #17 Biträdande professor Jan Jonsson Institutionen för data- och informationsteknik Chalmers tekniska högskola Tallriksmodellen Stackoperationer Element kan endast
Digital- och datorteknik Föreläsning #17 Biträdande professor Jan Jonsson Institutionen för data- och informationsteknik Chalmers tekniska högskola Tallriksmodellen Stackoperationer Element kan endast
Tentamen med lösningsförslag
 Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag EDA482 (EDA481) Maskinorienterad programmering D EDA487 (EDA486) Maskinorienterad programmering Z
Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag EDA482 (EDA481) Maskinorienterad programmering D EDA487 (EDA486) Maskinorienterad programmering Z
Assemblerprogrammering för ARM del 2
 Assemblerprogrammering för ARM del 2 Ur innehållet Programflöde Subrutiner, parametrar och returvärden Tillfälliga (lokala) variabler Läsanvisningar: Arbetsbok kap 2 Quick-guide, instruktionslistan Assemblerprogrammering
Assemblerprogrammering för ARM del 2 Ur innehållet Programflöde Subrutiner, parametrar och returvärden Tillfälliga (lokala) variabler Läsanvisningar: Arbetsbok kap 2 Quick-guide, instruktionslistan Assemblerprogrammering
Demonstration och konsultation Arbetsbokens avsnitt 7 Händelsestyrt processbyte Förberedande inför laboration 4
 Avbrott Demonstration och konsultation Arbetsbokens avsnitt 7 Händelsestyrt processbyte Förberedande inför laboration 4 Demonstrationsövning 5 1 Arbetsbok avsnitt 7: Undantag, avbrott - Uppgift 41 + enable_interrupt
Avbrott Demonstration och konsultation Arbetsbokens avsnitt 7 Händelsestyrt processbyte Förberedande inför laboration 4 Demonstrationsövning 5 1 Arbetsbok avsnitt 7: Undantag, avbrott - Uppgift 41 + enable_interrupt
Ansvarig lärare: Olof Andersson, Telefon 021-101314 (besöker skrivsalen)
") MÄLRLENS HÖGSKOL Institutionen för elektroteknik Tentamen Mikrodatorteknik T3760 atum 2005-10-28 Tid 08.30 12.30 nsvarig lärare: Olof ndersson, Telefon 021-101314 (besöker skrivsalen) Om du klarat samtliga
MÄLRLENS HÖGSKOL Institutionen för elektroteknik Tentamen Mikrodatorteknik T3760 atum 2005-10-28 Tid 08.30 12.30 nsvarig lärare: Olof ndersson, Telefon 021-101314 (besöker skrivsalen) Om du klarat samtliga
Assemblerprogrammering - fördjupning
 Assemblerprogrammering - fördjupning Ur innehållet: Trampoliner tabellerade funktionsadresser Aktiveringspost med ARM Cortex M4 Mer om parameteröverföring Registerspill Kodgenerering - ISA "Kodoptimering"
Assemblerprogrammering - fördjupning Ur innehållet: Trampoliner tabellerade funktionsadresser Aktiveringspost med ARM Cortex M4 Mer om parameteröverföring Registerspill Kodgenerering - ISA "Kodoptimering"
Datorsystemteknik Föreläsning 7DAVA14
 Datorsystemteknik Föreläsning 7DAVA14 Innehåll Introduktion (forts) Polling (cyklisk avfrågning) Större delen av materialet framtaget av :Jan Eric Larsson, Mats Brorsson och Mirec Novak IT-inst LTH Exempel
Datorsystemteknik Föreläsning 7DAVA14 Innehåll Introduktion (forts) Polling (cyklisk avfrågning) Större delen av materialet framtaget av :Jan Eric Larsson, Mats Brorsson och Mirec Novak IT-inst LTH Exempel
Programräknaren visar alltid på nästa instruktion som skall utföras. Så fort en instruktion har hämtats så visar programräknaren på nästa instruktion.
 F5 Föreläsning i Mikrodatorteknink 2006-09-05 Programräknaren visar alltid på nästa instruktion som skall utföras. Så fort en instruktion har hämtats så visar programräknaren på nästa instruktion. Programräknaren
F5 Föreläsning i Mikrodatorteknink 2006-09-05 Programräknaren visar alltid på nästa instruktion som skall utföras. Så fort en instruktion har hämtats så visar programräknaren på nästa instruktion. Programräknaren
F5: Högnivåprogrammering
 F5: Högnivåprogrammering Parameteröverföring Koppling mellan låg- och högnivåprogrammering Lokala variabler Heapen Datatyper 1 Subrutin, parameteröverföring: 1(3) Via register genom värde Skicka data via
F5: Högnivåprogrammering Parameteröverföring Koppling mellan låg- och högnivåprogrammering Lokala variabler Heapen Datatyper 1 Subrutin, parameteröverföring: 1(3) Via register genom värde Skicka data via
F5: Högnivåprogrammering
 1 F5: Högnivåprogrammering Parameteröverföring Koppling mellan låg- och högnivåprogrammering Lokala variabler Heapen Datatyper 1 Subrutin, parameteröverföring: 1(3) Via register genom värde Skicka data
1 F5: Högnivåprogrammering Parameteröverföring Koppling mellan låg- och högnivåprogrammering Lokala variabler Heapen Datatyper 1 Subrutin, parameteröverföring: 1(3) Via register genom värde Skicka data
Polling (cyklisk avfrågning) Avbrott
 Avbrott") Polling (cyklisk avfrågning) Avbrott Större delen av materialet framtaget av :Jan Eric Larsson, Mats Brorsson och Mirec Novak IT-inst LTH Att känna till begreppet polling (cyklisk avfrågning) och hur det
Polling (cyklisk avfrågning) Avbrott Större delen av materialet framtaget av :Jan Eric Larsson, Mats Brorsson och Mirec Novak IT-inst LTH Att känna till begreppet polling (cyklisk avfrågning) och hur det
Tentamen med lösningsförslag
 Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag DAT017 (DAT016) Maskinorienterad programmering IT EDA482 (EDA481) Maskinorienterad programmering D
Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag DAT017 (DAT016) Maskinorienterad programmering IT EDA482 (EDA481) Maskinorienterad programmering D
Programmering av inbyggda system. Kodningskonventioner. Viktor Kämpe
 Kodningskonventioner Viktor Kämpe Varför kodningskonventioner? Förståelse för Skillnaden mellan lokala/globala variabler. Funktionsargument. Returvärde. Möjliggör Mix av assembler och C. Kodningskonventioner/VK
Kodningskonventioner Viktor Kämpe Varför kodningskonventioner? Förståelse för Skillnaden mellan lokala/globala variabler. Funktionsargument. Returvärde. Möjliggör Mix av assembler och C. Kodningskonventioner/VK
Programallokering. Programtyper. Att placera program i flashrespektive. Program i FLASH-minne. Program i RAM-minne
 Programallokering Att placera program i flashrespektive RAM-minne Program i FLASH-minne Bara lokala variabler Globala oinitierade variabler Globala initierade variabler Program med avbrott Program i RAM-minne
Programallokering Att placera program i flashrespektive RAM-minne Program i FLASH-minne Bara lokala variabler Globala oinitierade variabler Globala initierade variabler Program med avbrott Program i RAM-minne
A-del motsvarande KS1
 MÄLARDALENS HÖGSKOLA Institutionen för elektroteknik Tentamen Mikrodatorteknik CT3760 Datum 2005-10-28 Tid 08.30 12.30 Svar till A- och B-del A-del motsvarande KS1 Uppgift A1. Vad blir resultatet då instruktionen
MÄLARDALENS HÖGSKOLA Institutionen för elektroteknik Tentamen Mikrodatorteknik CT3760 Datum 2005-10-28 Tid 08.30 12.30 Svar till A- och B-del A-del motsvarande KS1 Uppgift A1. Vad blir resultatet då instruktionen
Elektroteknik MF1016 föreläsning 9 MF1017 föreläsning 7 Mikrodatorteknik
 Elektroteknik MF1016 föreläsning 9 MF1017 föreläsning 7 - Inbyggda system - Analog till digital signal - Utvecklingssystem, målsystem - Labutrustningen - Uppbyggnad av mikrokontroller - Masinkod, assemblerkod
Elektroteknik MF1016 föreläsning 9 MF1017 föreläsning 7 - Inbyggda system - Analog till digital signal - Utvecklingssystem, målsystem - Labutrustningen - Uppbyggnad av mikrokontroller - Masinkod, assemblerkod
Dataminne I/O Stack 0x005D 0x3D SP low byte 0x005E 0x3E SP high byte
 CT3760 Mikrodatorteknik Föreläsning 4 Tisdag 2005-09-06 Stacken I datasammmanhang är en stack ett minnesområde. Det är processorn som använder stacken. För att skapa en stack anger man en adress i stackpekarregistret.
CT3760 Mikrodatorteknik Föreläsning 4 Tisdag 2005-09-06 Stacken I datasammmanhang är en stack ett minnesområde. Det är processorn som använder stacken. För att skapa en stack anger man en adress i stackpekarregistret.
Maskinorienterad Programmering LP3-2017/2018
 Maskinorienterad Programmering LP3-2017/2018 Lars Bengtsson, D&IT Syften, målsättningar, kurslitteratur och genomförande Översikt av laborationer Introduktion till ARM-processorn och till laborationssystemet
Maskinorienterad Programmering LP3-2017/2018 Lars Bengtsson, D&IT Syften, målsättningar, kurslitteratur och genomförande Översikt av laborationer Introduktion till ARM-processorn och till laborationssystemet
Digital- och datorteknik
 Digital- och datorteknik Föreläsning #17 Biträdande professor Jan Jonsson Institutionen för data- och informationsteknik Chalmers tekniska högskola F-36 FLEX- och FLIS-datorn Ext-8 Tallriksmodellen Stackoperationer
Digital- och datorteknik Föreläsning #17 Biträdande professor Jan Jonsson Institutionen för data- och informationsteknik Chalmers tekniska högskola F-36 FLEX- och FLIS-datorn Ext-8 Tallriksmodellen Stackoperationer
Maskinorienterad programmering
 Maskinorienterad programmering Sammanfattning Ur innehållet: Vi rekapitulerar kursens syften Vi repeterar kursens lärandemål Vi belyser hur den skriftliga delen av examinationen genomförs. Sammanfattning
Maskinorienterad programmering Sammanfattning Ur innehållet: Vi rekapitulerar kursens syften Vi repeterar kursens lärandemål Vi belyser hur den skriftliga delen av examinationen genomförs. Sammanfattning
Outline. Datorsystemtekni. Kravspecifikation. Kravspecifikation (forts.)
") Outline för D2, ICT2, E3 och Mek3 Nicholas Wickström Högskolan i Halmstad Sverige p.1/18 Förra föreläsningen Specifikation -Kravspecifikation -Funktionsspecifikation -Blockdiagram Operativsystem -Grunder,
Outline för D2, ICT2, E3 och Mek3 Nicholas Wickström Högskolan i Halmstad Sverige p.1/18 Förra föreläsningen Specifikation -Kravspecifikation -Funktionsspecifikation -Blockdiagram Operativsystem -Grunder,
TSEA28 Datorteknik Y (och U)
") TSEA28 Datorteknik Y (och U), föreläsning 7, Kent Palmkvist 2019-02-15 3 TSEA28 Datorteknik Y (och U) Föreläsning 7 Kent Palmkvist, ISY Praktiska kommentarer Ordningsfråga Glöm inte koppla ned anslutningarna
TSEA28 Datorteknik Y (och U), föreläsning 7, Kent Palmkvist 2019-02-15 3 TSEA28 Datorteknik Y (och U) Föreläsning 7 Kent Palmkvist, ISY Praktiska kommentarer Ordningsfråga Glöm inte koppla ned anslutningarna
I DAG fo 4. Printerport v3 med READY o DAV. Avbrott. Hur bra blev det egentligen????
 Rep Konstruktion av en Printer-Port ynkroniseringsproblem Villkorlig / ovillkorlig överföring Busy Wait och Polling Handskakningssignaler AVBROTT!!! svektor I-flagga svippa sdriven Printerport I DAG fo
Rep Konstruktion av en Printer-Port ynkroniseringsproblem Villkorlig / ovillkorlig överföring Busy Wait och Polling Handskakningssignaler AVBROTT!!! svektor I-flagga svippa sdriven Printerport I DAG fo
Datorteknik ERIK LARSSON
 Datorteknik ERIK LARSSON Inledning Ken Thompson och Dennis M. Ritchie utvecklade C Turingpriset( Nobelpris i datavetenskap ), 1983 Alan Turing (1912-1954) För deras utveckling av generell OS teori och
Datorteknik ERIK LARSSON Inledning Ken Thompson och Dennis M. Ritchie utvecklade C Turingpriset( Nobelpris i datavetenskap ), 1983 Alan Turing (1912-1954) För deras utveckling av generell OS teori och
Maskinorienterad Programmering IT2, LP2-2016/2017
 Maskinorienterad Programmering IT2, LP2-2016/2017 Syften, målsättningar, kurslitteratur och genomförande Översikt av laborationer Introduktion till ARM-processorn och till laborationssystemet 1 Kursens
Maskinorienterad Programmering IT2, LP2-2016/2017 Syften, målsättningar, kurslitteratur och genomförande Översikt av laborationer Introduktion till ARM-processorn och till laborationssystemet 1 Kursens
Institutionen för elektro- och informationsteknologi, LTH
 Datorteknik Föreläsning 5 Realtidssystem och realtidsprogrammering Mål Att du ska förstå hur avbrott används för - Mätning - Styrning - Stöd för körning av flera processer Att du ska förstå begreppet tråd
Datorteknik Föreläsning 5 Realtidssystem och realtidsprogrammering Mål Att du ska förstå hur avbrott används för - Mätning - Styrning - Stöd för körning av flera processer Att du ska förstå begreppet tråd
Datorteknik. Föreläsning 5. Realtidssystem och realtidsprogrammering. Institutionen för elektro- och informationsteknologi, LTH.
 Datorteknik Föreläsning 5 Realtidssystem och realtidsprogrammering Mål Att du ska förstå hur avbrott används för - Mätning - Styrning - Stöd för körning av flera processer Att du ska förstå begreppet tråd
Datorteknik Föreläsning 5 Realtidssystem och realtidsprogrammering Mål Att du ska förstå hur avbrott används för - Mätning - Styrning - Stöd för körning av flera processer Att du ska förstå begreppet tråd
BDM12 Användarbeskrivning. Introduktion
 Versioner/ändringar 1.0 2003-07 1.01 BUGFIX: FLASH unsecure algoritm 1.02 Fördröjning vid flash-prog. Statusutskrift under programmeringen. Programmeringsalgoritmen hanterar nu även 'bankade' minnet. Översättning
Versioner/ändringar 1.0 2003-07 1.01 BUGFIX: FLASH unsecure algoritm 1.02 Fördröjning vid flash-prog. Statusutskrift under programmeringen. Programmeringsalgoritmen hanterar nu även 'bankade' minnet. Översättning
Lösningar till tentamen i EIT070 Datorteknik
 Lösningar till tentamen i EIT070 Datorteknik Institutionen för Elektro- och informationsteknik, LTH Onsdagen den 7 mars 2012, klockan 14:00 19:00 i Vic 2, 3. Tillåtna hjälpmedel: på tentan utdelad formelsamling,
Lösningar till tentamen i EIT070 Datorteknik Institutionen för Elektro- och informationsteknik, LTH Onsdagen den 7 mars 2012, klockan 14:00 19:00 i Vic 2, 3. Tillåtna hjälpmedel: på tentan utdelad formelsamling,
Mål. Datorteknik. Introduktion. Innehåll. Verklig situation - pappaledighet. Introduktion (forts)
") Mål Datorteknik Föreläsning 4 Att känna till begreppet polling (cyklisk avfrågning) och hur det implementeras Att förstå varför avbrottstyrd exekvering är överlägset polling Att veta vilken information
Mål Datorteknik Föreläsning 4 Att känna till begreppet polling (cyklisk avfrågning) och hur det implementeras Att förstå varför avbrottstyrd exekvering är överlägset polling Att veta vilken information
Institutionen för elektro- och informationsteknologi, LTH
 Datorteknik Föreläsning 4 Polling och avbrott Mål Att känna till begreppet polling (cyklisk avfrågning) och hur det implementeras Att förstå varför avbrottstyrd exekvering är överlägset polling Att veta
Datorteknik Föreläsning 4 Polling och avbrott Mål Att känna till begreppet polling (cyklisk avfrågning) och hur det implementeras Att förstå varför avbrottstyrd exekvering är överlägset polling Att veta
TSEA28 Datorteknik Y (och U)
") TSEA28 Datorteknik Y (och U), föreläsning 7, Kent Palmkvist 2018-02-12 3 TSEA28 Datorteknik Y (och U) Föreläsning 7 Kent Palmkvist, ISY Praktiska kommentarer Ordningsfråga Glöm inte koppla ned anslutningarna
TSEA28 Datorteknik Y (och U), föreläsning 7, Kent Palmkvist 2018-02-12 3 TSEA28 Datorteknik Y (och U) Föreläsning 7 Kent Palmkvist, ISY Praktiska kommentarer Ordningsfråga Glöm inte koppla ned anslutningarna
Realtidsprogrammering. En introduktion Implementering (med exempel från PIC)
") Realtidsprogrammering En introduktion Implementering (med exempel från PIC) Utan timing Periodtid varierar beroende på funktionernas exekveringstid. Specificera endast maxtid ( Worst case) och eventuellt
Realtidsprogrammering En introduktion Implementering (med exempel från PIC) Utan timing Periodtid varierar beroende på funktionernas exekveringstid. Specificera endast maxtid ( Worst case) och eventuellt
Assemblerprogrammering för ARM del 1
 Assemblerprogrammering för ARM del 1 Ur innehållet: Assemblerspråk Ordlängder och heltalstyper i C Variabeldeklarationer Programkonstruktioner Tilldelningar Uttrycksevaluering Ovillkorliga programflöden
Assemblerprogrammering för ARM del 1 Ur innehållet: Assemblerspråk Ordlängder och heltalstyper i C Variabeldeklarationer Programkonstruktioner Tilldelningar Uttrycksevaluering Ovillkorliga programflöden
Datorteknik. Föreläsning 4. Polling och avbrott. Institutionen för elektro- och informationsteknologi, LTH. Mål
 Datorteknik Föreläsning 4 Polling och avbrott Mål Att känna till begreppet polling (cyklisk avfrågning) och hur det implementeras Att förstå varför avbrottstyrd exekvering är överlägset polling Att veta
Datorteknik Föreläsning 4 Polling och avbrott Mål Att känna till begreppet polling (cyklisk avfrågning) och hur det implementeras Att förstå varför avbrottstyrd exekvering är överlägset polling Att veta
Tentamen med lösningsförslag
 Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag EDA482 (EDA481) Maskinorienterad programmering D EDA487 (EDA486) Maskinorienterad programmering Z
Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag EDA482 (EDA481) Maskinorienterad programmering D EDA487 (EDA486) Maskinorienterad programmering Z
Undantagstyper. Maskinorienterad Programmering 2010/2011. MC68HC12, Stencil Assemblerprogrammering.pdf CPU12 Reference Guide
 Maskinorienterad Programmering 200/20 MC68HC2, Stencil Assemblerprogrammering.pdf CPU2 Reference Guide Arbetsbok b för MC2, avsnitt 2 Exekveringstillstånd tå Processorn befinner sig alltid i något av tillstånden:
Maskinorienterad Programmering 200/20 MC68HC2, Stencil Assemblerprogrammering.pdf CPU2 Reference Guide Arbetsbok b för MC2, avsnitt 2 Exekveringstillstånd tå Processorn befinner sig alltid i något av tillstånden:
TDIU01 - Programmering i C++, grundkurs
 TDIU01 - Programmering i C++, grundkurs Pekare och Listor Eric Elfving Institutionen för datavetenskap 31 oktober 2014 Översikt 2/41 Internminne Pekare Dynamiska datastrukturer (Enkellänkade) listor Arbeta
TDIU01 - Programmering i C++, grundkurs Pekare och Listor Eric Elfving Institutionen för datavetenskap 31 oktober 2014 Översikt 2/41 Internminne Pekare Dynamiska datastrukturer (Enkellänkade) listor Arbeta
Maskinorienterad Programmering LP2-2017/2018
 Maskinorienterad Programmering LP2-2017/2018 Syften, målsättningar, kurslitteratur och genomförande Översikt av laborationer Introduktion till ARM-processorn och till laborationssystemet 1 Kursens hemsida
Maskinorienterad Programmering LP2-2017/2018 Syften, målsättningar, kurslitteratur och genomförande Översikt av laborationer Introduktion till ARM-processorn och till laborationssystemet 1 Kursens hemsida
Svar till tentamen den 16 december 2013 Datorarkitekturer med operativsystem, EDT621, 7,5 poäng
 Lunds Universitet LTH Ingenjörshögskolan, Helsingborg Svar till tentamen den 16 december 2013 Datorarkitekturer med operativsystem, EDT621, 7,5 poäng Skrivtid: 08.00-13.00 Tillåtna hjälpmedel: Inga. Maximalt
Lunds Universitet LTH Ingenjörshögskolan, Helsingborg Svar till tentamen den 16 december 2013 Datorarkitekturer med operativsystem, EDT621, 7,5 poäng Skrivtid: 08.00-13.00 Tillåtna hjälpmedel: Inga. Maximalt
Assemblerprogrammering för ARM del 3
 Assemblerprogrammering för ARM del 3 Ur innehållet Fält och sammansatta typer (poster) Pekarvariabler och pekarkonstanter Pekararitmetik, operationer på fält Läsanvisningar: Arbetsbok kap 2 Quick-guide,
Assemblerprogrammering för ARM del 3 Ur innehållet Fält och sammansatta typer (poster) Pekarvariabler och pekarkonstanter Pekararitmetik, operationer på fält Läsanvisningar: Arbetsbok kap 2 Quick-guide,
EDA480/EDA485 - Maskinorienterad programmering, tentamen 2006-xx-xx 1(7)
") EDA480/EDA485 - Maskinorienterad programmering, tentamen 2006-xx-xx 1(7) 1. Motivation ROM. 8kbyte 2 3 2 10 byte 13 Adressbitar [A12,A0] direkt till ROM-kapsel. RWM. 32kbyte 2 5 2 10 byte 15 Adressbitar
EDA480/EDA485 - Maskinorienterad programmering, tentamen 2006-xx-xx 1(7) 1. Motivation ROM. 8kbyte 2 3 2 10 byte 13 Adressbitar [A12,A0] direkt till ROM-kapsel. RWM. 32kbyte 2 5 2 10 byte 15 Adressbitar
Enkla datatyper minne
 Enkla datatyper minne 143.56 sant Sonja A falskt 18 1999-10-29 Bertil Gralvik, KTH Ingenjörsskolan 1 Addera två tal Algoritmen Summera tal Mata in två tal Beräkna Skriv ut resultat Mata in tal 1 Mata in
Enkla datatyper minne 143.56 sant Sonja A falskt 18 1999-10-29 Bertil Gralvik, KTH Ingenjörsskolan 1 Addera två tal Algoritmen Summera tal Mata in två tal Beräkna Skriv ut resultat Mata in tal 1 Mata in
TENTAMEN. Datorteknik. D1/E1/Mek1/Ö Hjälpmedel: Häfte "ARM-instruktioner", A4-format, 17 sidor. Maxpoäng:
 TENTAMEN D1/E1/Mek1/Ö1 1400-1800 Hjälpmedel: Häfte "ARM-instruktioner", A4-format, 17 sidor Maxpoäng: Betyg 3 Betyg 4 Betyg 5 60p 24p 36p 48p Frågor under tentamen: Börje Delistrand tel. +46702986358 Bilaga
TENTAMEN D1/E1/Mek1/Ö1 1400-1800 Hjälpmedel: Häfte "ARM-instruktioner", A4-format, 17 sidor Maxpoäng: Betyg 3 Betyg 4 Betyg 5 60p 24p 36p 48p Frågor under tentamen: Börje Delistrand tel. +46702986358 Bilaga
TSEA28 Datorteknik Y (och U)
") TSEA28 Datorteknik Y (och U), föreläsning 6, Kent Palmkvist 2018-01-29 3 Praktiska kommentarer, forts. TSEA28 Datorteknik Y (och U) Föreläsning 6 Kent Palmkvist, ISY Deadline anmälan till Lab1 del A idag
TSEA28 Datorteknik Y (och U), föreläsning 6, Kent Palmkvist 2018-01-29 3 Praktiska kommentarer, forts. TSEA28 Datorteknik Y (och U) Föreläsning 6 Kent Palmkvist, ISY Deadline anmälan till Lab1 del A idag
Assemblerprogrammering för ARM del 1
 Assemblerprogrammering för ARM del 1 Ur innehållet: Ordlängder och heltalstyper i C Variabeldeklarationer Programkonstruktioner Tilldelningar Uttrycksevaluering Ovillkorliga programflöden Funktion med
Assemblerprogrammering för ARM del 1 Ur innehållet: Ordlängder och heltalstyper i C Variabeldeklarationer Programkonstruktioner Tilldelningar Uttrycksevaluering Ovillkorliga programflöden Funktion med
En Von Neumann-arkitektur ( Von Neumann-principen i föreläsning 1) innebär:
 innebär:") Lösningsförslag för 725G45-tentan 3/11-10 1. Vad menas med Von Neumann-arkitektur? (2p) En Von Neumann-arkitektur ( Von Neumann-principen i föreläsning 1) innebär: Data och instruktioner lagras i samma
Lösningsförslag för 725G45-tentan 3/11-10 1. Vad menas med Von Neumann-arkitektur? (2p) En Von Neumann-arkitektur ( Von Neumann-principen i föreläsning 1) innebär: Data och instruktioner lagras i samma
Tentamen med lösningsförslag
 Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag LEU500 Maskinorienterad programmering Måndag 13 mars 2017, kl. 14.00-18.00 Examinator Lars Bengtsson
Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag LEU500 Maskinorienterad programmering Måndag 13 mars 2017, kl. 14.00-18.00 Examinator Lars Bengtsson
Kontrollskrivning Mikrodatorteknik CDT209 2007-09-20 S2-704
 Kontrollskrivning Mikrodatorteknik CDT209 2007-09-20 S2-704 Svar Svar till uppgifterna lämnas på separat papper. En poäng per uppgift. Max 30 poäng. Bonuspoäng beräknas enligt följande tabell: 6-10 poäng
Kontrollskrivning Mikrodatorteknik CDT209 2007-09-20 S2-704 Svar Svar till uppgifterna lämnas på separat papper. En poäng per uppgift. Max 30 poäng. Bonuspoäng beräknas enligt följande tabell: 6-10 poäng
F2: Motorola Arkitektur. Assembler vs. Maskinkod Exekvering av instruktioner i Instruktionsformat MOVE instruktionen
 68000 Arkitektur F2: Motorola 68000 I/O signaler Processor arkitektur Programmeringsmodell Assembler vs. Maskinkod Exekvering av instruktioner i 68000 Instruktionsformat MOVE instruktionen Adresseringsmoder
68000 Arkitektur F2: Motorola 68000 I/O signaler Processor arkitektur Programmeringsmodell Assembler vs. Maskinkod Exekvering av instruktioner i 68000 Instruktionsformat MOVE instruktionen Adresseringsmoder
3. Mikroprogrammering II
 3. Mikroprogrammering II lite repetition in/ut-matning avbrott på OR-datorn hoppinstruktion labben Olle Roos dator LDA 000 12 ADD 100 7 STA 000 13 12 1 13 8 13 6 8 0 18,1,11 2,3,5,11 7,8,11 17,10 18,1,11
3. Mikroprogrammering II lite repetition in/ut-matning avbrott på OR-datorn hoppinstruktion labben Olle Roos dator LDA 000 12 ADD 100 7 STA 000 13 12 1 13 8 13 6 8 0 18,1,11 2,3,5,11 7,8,11 17,10 18,1,11
Ett program som frågar regelbundet om något skall utföras. Exempelvis om spänningen på ett batteri sjunkit under en viss nivå.
 CT3760 Mikrodatorteknik Föreläsning 12 Torsdag 2006-10-05 Naxos Pollning Ett program som frågar regelbundet om något skall utföras. Exempelvis om spänningen på ett batteri sjunkit under en viss nivå. En
CT3760 Mikrodatorteknik Föreläsning 12 Torsdag 2006-10-05 Naxos Pollning Ett program som frågar regelbundet om något skall utföras. Exempelvis om spänningen på ett batteri sjunkit under en viss nivå. En
Laboration 4: Knappstuds Drivrutiner för att eliminera störningar.
 ATMega16 Laborationer av Kjell 2 Rev:5 Datum: 29.09.2010 Page 1 of 7 Laboration 4: Knappstuds Drivrutiner för att eliminera störningar. Inledning: Laborationskortet EasyAVR6 har bland annat tryckknappar
ATMega16 Laborationer av Kjell 2 Rev:5 Datum: 29.09.2010 Page 1 of 7 Laboration 4: Knappstuds Drivrutiner för att eliminera störningar. Inledning: Laborationskortet EasyAVR6 har bland annat tryckknappar
Stack och subrutiner Programmeringskonventionen
 Stack och subrutiner Programmeringskonventionen Du ska förstå hur en instruktion behandlas i processorn Du ska känna till några fler instruktioner Du ska veta hur maskinkoden för ett program byggs upp
Stack och subrutiner Programmeringskonventionen Du ska förstå hur en instruktion behandlas i processorn Du ska känna till några fler instruktioner Du ska veta hur maskinkoden för ett program byggs upp
Översikt Introduktion DST 1. Nicholas Wickström. IDE, Högskolan i Halmstad. N. Wickström
 DST 1 Nicholas Wickström IDE, Högskolan i Halmstad 2009 1 Outline 1 Vad är Hårdvara? (Datorsystemmodell; processor m. periferi, IO, Minne) Typiskt för hårdvarunära programmering (datablad, register, datastrukturer,...)
DST 1 Nicholas Wickström IDE, Högskolan i Halmstad 2009 1 Outline 1 Vad är Hårdvara? (Datorsystemmodell; processor m. periferi, IO, Minne) Typiskt för hårdvarunära programmering (datablad, register, datastrukturer,...)
F4: Assemblerprogrammering
 F4: Assemblerprogrammering Hoppinstruktioner Branch Jump Med vilkor IF satser Loopar while-loopar do-while- loopar for-loopar Stackhantering Underprogram 1 BRA rel_adr Branch Always Relativadressering
F4: Assemblerprogrammering Hoppinstruktioner Branch Jump Med vilkor IF satser Loopar while-loopar do-while- loopar for-loopar Stackhantering Underprogram 1 BRA rel_adr Branch Always Relativadressering
Operative system. LRU-algoritm (2 p) Svar: 7 fel. c) Optimal algoritm (2 p) Svar: 6 fel
 Svar: 7 fel. c) Optimal algoritm (2 p) Svar: 6 fel") Uppgift 3 Till en process som kräver 8 sidor allokeras 4 sidoramar. Antag följande referenssträng: 1,2,8,3,4,3,8,2,1,4 Hur många sidofel kommer att genereras (demand paging) med en a) FIFO-algoritm (2
Uppgift 3 Till en process som kräver 8 sidor allokeras 4 sidoramar. Antag följande referenssträng: 1,2,8,3,4,3,8,2,1,4 Hur många sidofel kommer att genereras (demand paging) med en a) FIFO-algoritm (2
LABORATION. Datorteknik Y
 LABORATION Datorteknik Y Avbrottsprogrammering på Darma Version 4.03 Februari 2019 (OA, KP) Namn och personnummer Godkänd 1 1 Inledning Syftet med laborationen är först att ge övning i avbrottsprogrammering
LABORATION Datorteknik Y Avbrottsprogrammering på Darma Version 4.03 Februari 2019 (OA, KP) Namn och personnummer Godkänd 1 1 Inledning Syftet med laborationen är först att ge övning i avbrottsprogrammering
SVAR TILL TENTAMEN I DATORSYSTEM, VT2013
 Rahim Rahmani (rahim@dsv.su.se) Division of ACT Department of Computer and Systems Sciences Stockholm University SVAR TILL TENTAMEN I DATORSYSTEM, VT2013 Tentamensdatum: 2013-03-21 Tentamen består av totalt
Rahim Rahmani (rahim@dsv.su.se) Division of ACT Department of Computer and Systems Sciences Stockholm University SVAR TILL TENTAMEN I DATORSYSTEM, VT2013 Tentamensdatum: 2013-03-21 Tentamen består av totalt
Övning2 Datorteknik, HH vt12 - Programmering
 Övning2 Datorteknik, HH vt12 - Programmering För denna övning behöver man adresskarta och beskrivning av laborationsplattform. Finns bland föreläsningsanteckning samt i bilaga l till Lab l. Använd även
Övning2 Datorteknik, HH vt12 - Programmering För denna övning behöver man adresskarta och beskrivning av laborationsplattform. Finns bland föreläsningsanteckning samt i bilaga l till Lab l. Använd även
#include <pic.h> #include <sys.h> char LEFT,RIGHT,MOTORHASTIGHET;
 Att avlusa en rad Assembler tar lika lång tid som att avlusa en rad C. Att skriva i C gör att man är utlämnad till kompilatorns sätt att göra assembler koden. Assembler ger fullständig kontroll över tider.
Att avlusa en rad Assembler tar lika lång tid som att avlusa en rad C. Att skriva i C gör att man är utlämnad till kompilatorns sätt att göra assembler koden. Assembler ger fullständig kontroll över tider.
Datorarkitekturer med operativsystem ERIK LARSSON
 Datorarkitekturer med operativsystem ERIK LARSSON Pipelining Tid SSA P Pipelining FI DI CO FO EI WO FI DI CO FO EI WO FI DI CO FO EI WO FI DI CO FO EI WO Superscalar pipelining FI DI CO FO EI WO FI DI
Datorarkitekturer med operativsystem ERIK LARSSON Pipelining Tid SSA P Pipelining FI DI CO FO EI WO FI DI CO FO EI WO FI DI CO FO EI WO FI DI CO FO EI WO Superscalar pipelining FI DI CO FO EI WO FI DI
TSEA28 Datorteknik Y (och U)
") TSEA28 Datorteknik Y (och U), föreläsning 6, Kent Palmkvist 2019-02-04 3 Praktiska kommentarer TSEA28 Datorteknik Y (och U) Föreläsning 6 Kent Palmkvist, ISY Deadline anmälan till Lab1 del A idag 4/2 kl
TSEA28 Datorteknik Y (och U), föreläsning 6, Kent Palmkvist 2019-02-04 3 Praktiska kommentarer TSEA28 Datorteknik Y (och U) Föreläsning 6 Kent Palmkvist, ISY Deadline anmälan till Lab1 del A idag 4/2 kl
DAT 015 Maskinorienterad programmering 2010/2011. Uppbyggnad_och_funktion.pdf
 DAT 015 Maskinorienterad programmering 2010/2011 Uppbyggnad_och_funktion.pdf Ur innehållet: Bussystem, intern kommunikation i datorsystemet Adressavkodning, hur primärminne och I/O-enheter kan anslutas
DAT 015 Maskinorienterad programmering 2010/2011 Uppbyggnad_och_funktion.pdf Ur innehållet: Bussystem, intern kommunikation i datorsystemet Adressavkodning, hur primärminne och I/O-enheter kan anslutas
Lågnivåprogrammering. Föreläsning 2 Lågnivåprogrammering. Binära tal. En enkel modell av datorns inre
 Lågnivåprogrammering Föreläsning 2 Lågnivåprogrammering Förberedelse inför laboration 2. Maskinspråk, assemblerspråk Talrepresentation En enkel dator, komponenter Instruktionsformat, instruktionscykel
Lågnivåprogrammering Föreläsning 2 Lågnivåprogrammering Förberedelse inför laboration 2. Maskinspråk, assemblerspråk Talrepresentation En enkel dator, komponenter Instruktionsformat, instruktionscykel
Lathund. C för inbyggda system
 Lathund C för inbyggda system Revision 1 2000-09-21 Anders Arvidsson Jonny Martinsson Synpunkter välkomnas! Innehållsförteckning 1 Introduktion...3 1.1 Assembler kontra C...3 1.2 Kodexempel...3 1.3 MPLAB...4
Lathund C för inbyggda system Revision 1 2000-09-21 Anders Arvidsson Jonny Martinsson Synpunkter välkomnas! Innehållsförteckning 1 Introduktion...3 1.1 Assembler kontra C...3 1.2 Kodexempel...3 1.3 MPLAB...4
Datorarkitekturer med operativsystem ERIK LARSSON
 Datorarkitekturer med operativsystem ERIK LARSSON Semantic gap Alltmer avancerade programmeringsspråk tas fram för att göra programvaruutveckling mer kraftfull Dessa programmeringsspråk (Ada, C++, Java)
Datorarkitekturer med operativsystem ERIK LARSSON Semantic gap Alltmer avancerade programmeringsspråk tas fram för att göra programvaruutveckling mer kraftfull Dessa programmeringsspråk (Ada, C++, Java)
Övningsuppgifter STYRNING - i Mikrodatorteknik för U2 2010
 STYRNING - i Mikrodatorteknik för U2 2010 1. Uppgift M10 (5p) aug-09 Skriv ett program i PIC-assembler som - gör PortB till utport - ettställer bit 0, 3 och 4 i PortB - nollställer bit 5 och 6 i PortB
STYRNING - i Mikrodatorteknik för U2 2010 1. Uppgift M10 (5p) aug-09 Skriv ett program i PIC-assembler som - gör PortB till utport - ettställer bit 0, 3 och 4 i PortB - nollställer bit 5 och 6 i PortB
Datorarkitekturer med operativsystem ERIK LARSSON
 Datorarkitekturer med operativsystem ERIK LARSSON Översikt Processorn Maskininstruktioner Dator Primärminne Data/instruktioner Kontroll Central processing unit (CPU) Fetch instruction Execute instruction
Datorarkitekturer med operativsystem ERIK LARSSON Översikt Processorn Maskininstruktioner Dator Primärminne Data/instruktioner Kontroll Central processing unit (CPU) Fetch instruction Execute instruction
System S. Datorarkitektur - en inledning. Organisation av datorsystem: olika abstraktionsnivåer. den mest abstrakta synen på systemet
 Datorarkitektur - en inledning Organisation av datorsystem: olika abstraktionsnivåer System S den mest abstrakta synen på systemet A B C Ett högnivåperspektiv på systemet a1 b1 c1 a2 b3 b2 c2 c3 En mera
Datorarkitektur - en inledning Organisation av datorsystem: olika abstraktionsnivåer System S den mest abstrakta synen på systemet A B C Ett högnivåperspektiv på systemet a1 b1 c1 a2 b3 b2 c2 c3 En mera
Maskinorienterad programmering
 Institutionen för data och informationsteknik. Roger Johansson, Ulf Assarsson 2017-09-27 Maskinorienterad programmering Laborationer Detta laborations-pm innehåller anvisningar om förberedelser inför genomförande
Institutionen för data och informationsteknik. Roger Johansson, Ulf Assarsson 2017-09-27 Maskinorienterad programmering Laborationer Detta laborations-pm innehåller anvisningar om förberedelser inför genomförande
Programmering av inbyggda system 2014/2015
 Programmering av inbyggda system 2014/2015 Sammanfattning Kursens syften är att vara en introduktion till konstruktion av små inbyggda system och att ge en förståelse för hur imperativa styrstrukturer
Programmering av inbyggda system 2014/2015 Sammanfattning Kursens syften är att vara en introduktion till konstruktion av små inbyggda system och att ge en förståelse för hur imperativa styrstrukturer
GPIO - General Purpose Input Output
 GPIO - General Purpose Input Output Ur innehållet: Ideala och verkliga signaler Bitvis in- och utmatning Anslutning - fysiskt gränssnitt F407 - GPIO-modul tillämpningar Läsanvisningar: Arbetsbok avsnitt
GPIO - General Purpose Input Output Ur innehållet: Ideala och verkliga signaler Bitvis in- och utmatning Anslutning - fysiskt gränssnitt F407 - GPIO-modul tillämpningar Läsanvisningar: Arbetsbok avsnitt
LEU240 Mikrodatorsystem
 Institutionen för data- och informationsteknik 2011-10-11 LEU240 Mikrodatorsystem Vi har tidigare i olika sammanhang sett att det är önskvärt att kunna använda ett högnivåspråk som C för att skriva program
Institutionen för data- och informationsteknik 2011-10-11 LEU240 Mikrodatorsystem Vi har tidigare i olika sammanhang sett att det är önskvärt att kunna använda ett högnivåspråk som C för att skriva program
7) Beskriv tre sätt att överföra parametrar mellan huvudprogram och subrutin.
 Beskriv tre sätt att överföra parametrar mellan huvudprogram och subrutin.") 1(5) Övningstentamen i Mikrodatorer och assemblerprogrammering, ELGA05 Hjälpmedel: Bifogad lista med memokoder för MC68xxx. Samtliga programmeringsuppgifter ska innehålla flödesschema med förklaringar
1(5) Övningstentamen i Mikrodatorer och assemblerprogrammering, ELGA05 Hjälpmedel: Bifogad lista med memokoder för MC68xxx. Samtliga programmeringsuppgifter ska innehålla flödesschema med förklaringar
Datorteknik. Föreläsning 3. Assembler, stack och subrutiner, programmeringskonventionen. Institutionen för elektro- och informationsteknologi, LTH
 Datorteknik Föreläsning 3 Assembler, stack och subrutiner, programmeringskonventionen Mål Att veta hur maskinkoden för ett program byggs upp Att börja programmera i assembler på riktigt Att kunna skriva
Datorteknik Föreläsning 3 Assembler, stack och subrutiner, programmeringskonventionen Mål Att veta hur maskinkoden för ett program byggs upp Att börja programmera i assembler på riktigt Att kunna skriva
Institutionen för elektro- och informationsteknologi, LTH
 Datorteknik Föreläsning 3 Assembler, stack och subrutiner, programmeringskonventionen Mål Att veta hur maskinkoden för ett program byggs upp Att börja programmera i assembler på riktigt Att kunna skriva
Datorteknik Föreläsning 3 Assembler, stack och subrutiner, programmeringskonventionen Mål Att veta hur maskinkoden för ett program byggs upp Att börja programmera i assembler på riktigt Att kunna skriva
Laboration 2 i Datorteknik- Assemblerprogrammering II
 Högskolan i Halmstad 1 (8) - Assemblerprogrammering II Målet med laborationen är att få begrepp om Subrutiner. in/utparametrar. Lokala variabler Maska in bitar till ett register Konstruktion av subrutiner
Högskolan i Halmstad 1 (8) - Assemblerprogrammering II Målet med laborationen är att få begrepp om Subrutiner. in/utparametrar. Lokala variabler Maska in bitar till ett register Konstruktion av subrutiner
INGENJÖRSHÖGSKOLAN INGENJÖRSHÖGSKOLAN
 Dagens föreläsning Inbyggnadsprocessorer - och programmering ❾ Översikt PIC-processorn ❿ Familj ❿ Flash / EPROM ❿ Introduktion: 16F84 ❾ ❿ Harvard / von Neumann ❿ CISC / RISC ❿ Pipelining ❾ Programmering
Dagens föreläsning Inbyggnadsprocessorer - och programmering ❾ Översikt PIC-processorn ❿ Familj ❿ Flash / EPROM ❿ Introduktion: 16F84 ❾ ❿ Harvard / von Neumann ❿ CISC / RISC ❿ Pipelining ❾ Programmering
Programexempel för FLEX
 Aktivera Kursens mål: Konstruera en dator mha grindar och programmera denna Aktivera Förra veckans mål: Konstruera styrenheten. genom att. implementera olika maskininstruktioner i styrenheten. Kunna använda
Aktivera Kursens mål: Konstruera en dator mha grindar och programmera denna Aktivera Förra veckans mål: Konstruera styrenheten. genom att. implementera olika maskininstruktioner i styrenheten. Kunna använda
Microprocessor / Microcontroller. Industrial Electrical Engineering and Automation
 Microprocessor / Microcontroller Varför? Billiga Innehåller bara det nödvändigaste Kräver få kringkomponenter Enkla att programmera PIC16F887 PIC16F887 In- och utgångar Pinnar på PIC16F887 Exempel: pinne
Microprocessor / Microcontroller Varför? Billiga Innehåller bara det nödvändigaste Kräver få kringkomponenter Enkla att programmera PIC16F887 PIC16F887 In- och utgångar Pinnar på PIC16F887 Exempel: pinne
Lathund. C för inbyggda system
 Lathund C för inbyggda system Revision 2 2001-04-13 Anders Arvidsson Jonny Martinsson Synpunkter välkomnas! Innehållsförteckning 1 Introduktion... 3 1.1 Assembler kontra C... 3 1.2 Kodexempel... 3 1.3
Lathund C för inbyggda system Revision 2 2001-04-13 Anders Arvidsson Jonny Martinsson Synpunkter välkomnas! Innehållsförteckning 1 Introduktion... 3 1.1 Assembler kontra C... 3 1.2 Kodexempel... 3 1.3
Assemblerprogrammering för ARM del 1
 Assemblerprogrammering för ARM del 1 Ur innehållet: Assemblerspråk Ordlängder och datatyper Variabeldeklarationer Programkonstruktioner Tilldelningar Uttrycksevaluering Ovillkorliga programflöden Läsanvisningar:
Assemblerprogrammering för ARM del 1 Ur innehållet: Assemblerspråk Ordlängder och datatyper Variabeldeklarationer Programkonstruktioner Tilldelningar Uttrycksevaluering Ovillkorliga programflöden Läsanvisningar:
Tentamen i EIT070 Datorteknik
 Tentamen i EIT070 Datorteknik Institutionen för Elektro- och informationsteknik, LTH Onsdagen den 10 mars 2010, klockan 08:00 13:00 å Victoriastadion 1 och 2. Tillåtna hjälpmedel: på tentan utdelad formelsamling,
Tentamen i EIT070 Datorteknik Institutionen för Elektro- och informationsteknik, LTH Onsdagen den 10 mars 2010, klockan 08:00 13:00 å Victoriastadion 1 och 2. Tillåtna hjälpmedel: på tentan utdelad formelsamling,
Per Holm Lågnivåprogrammering 2014/15 24 / 177. int och double = = 2, 147, 483, 647
 Lågnivåprogrammering Föreläsning 2 Lågnivåprogrammering Förberedelse inför laboration 2. Maskinspråk, assemblerspråk Talrepresentation En enkel dator, komponenter Instruktionsformat, instruktionscykel
Lågnivåprogrammering Föreläsning 2 Lågnivåprogrammering Förberedelse inför laboration 2. Maskinspråk, assemblerspråk Talrepresentation En enkel dator, komponenter Instruktionsformat, instruktionscykel
c a OP b Digitalteknik och Datorarkitektur 5hp ALU Design Principle 1 - Simplicity favors regularity add $15, $8, $11
 A basic -bit Select between various operations: OR, AND, XOR, and addition Full Adder Multiplexer Digitalteknik och Datorarkitektur hp Föreläsning : introduktion till MIPS-assembler - april 8 karlmarklund@ituuse
A basic -bit Select between various operations: OR, AND, XOR, and addition Full Adder Multiplexer Digitalteknik och Datorarkitektur hp Föreläsning : introduktion till MIPS-assembler - april 8 karlmarklund@ituuse
Lösningar till tentamen i EIT070 Datorteknik
 Lösningar till tentamen i EIT070 Datorteknik Institutionen för Elektro- och informationsteknik, LTH Onsdagen den 13 mars 2013, klockan 14:00 19:00 i Vic 2 A-D, 3 A-C. Tillåtna hjälpmedel: på tentan utdelad
Lösningar till tentamen i EIT070 Datorteknik Institutionen för Elektro- och informationsteknik, LTH Onsdagen den 13 mars 2013, klockan 14:00 19:00 i Vic 2 A-D, 3 A-C. Tillåtna hjälpmedel: på tentan utdelad