Förväntad mätosäkerhet vid realtidsuppdaterad fri stationsetablering
|
|
|
- Ann-Sofie Lundberg
- för 5 år sedan
- Visningar:
Transkript
, 15 hp Lantmäteriteknik Lantmätarprogrammet, teknisk inriktning Examensarbete inom Samhällsbyggnad Handledare: Mohammad Bagherbandi")
1 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Förväntad mätosäkerhet vid realtidsuppdaterad fri stationsetablering En jämförelsestudie av olika fabrikat Daniel Morosini 2017 Examensarbete, Grundnivå (kandidatexamen), 15 hp Lantmäteriteknik Lantmätarprogrammet, teknisk inriktning Examensarbete inom Samhällsbyggnad Handledare: Mohammad Bagherbandi Examinator: Faramarz Nilfouroushan Bitr. Examinator: Marianne Berg
2 i
3 Förord Denna uppsats är skriven för att avsluta mina studier på Lantmäteriprogrammet på Högskolan i Gävle. Jag vill framföra ett varmt tack till min handledare Mohammad Bagherbandi, för hans kreativa stöd och handledning. Jag vill även tacka Bengt Lindvall på Norsecraft Geo i Sollentuna, för att erhållit Topcon mätningsinstrument och även agerat bollplank. Tony Cederström och Thomas Wallentin på PEAB i Gävle för att ha tillhandahållit Trimble mätningsinstrument. Till sist vill jag tacka mina examinatorer Faramarz Nilfouroushan och Marianne Berg, för deras dyrbara synpunkter. Gävle, juli 2017 Daniel Morosini ii
4 iii
5 Sammanfattning Realtidsuppdaterad fri stationsetablering (RUFRIS) är en metod för att utföra geodetiska mätningar med totalstation. Metodiken bygger på fri station som använder bakåtobjekt skapade i realtid med Nätverks - Real Time Kinematic (N-RTK). Den praktiska användningen är gynnsam i olika verksamhetsområden och nödvändigheten att ajourhålla passiva stomnät och fixpunkter upphört. Syftet med denna studie är att utforska vad den förväntade mätosäkerheten är vid RUFRIS-etablering och detaljmätning med mätningsinstrument av fabrikaten Leica, Trimble och Topcon. Andra studier visar att ökat antal bakåtobjekt vid RUFRIS ger en minskad mätosäkerhet, vilket också testas i denna studie. Olika tidsintervall vid kontinuerlig datalagring för positionsbestämning av bakåtobjekt med N-RTK har använts, tidsintervallerna är 10, 60 och 180 sekunder. I kombination med olika antal bakåtobjekt har stationsetableringar och detaljmätning utförts. Antalet bakåtobjekt använda är 3, 5, 10/15 och 25. Koordinaterna från RUFRIS har kontrollerats mot referenspunkter skapade med långa GNSS-mätningar så kallad. statisk mätning med 4 timmar och 30 minuter lång observationstid. Rådata skickades in till SWEPOSefterberäkningstjänst, för att få noggrant positionsbestämda referenspunkter i SWEREF och RH 2000 referenssystem. I sin tur användes referenspunkterna för att avgöra hur stora avvikelser som erhålls vid RUFRIS. Mätosäkerheten vid stationsetablering är upp till cirka 40 mm i plan och höjd, beroende på längd av tidsintervall och antal bakåtobjekt, och god geometrisk spridning av bakåtobjekt upprätthålls. Mätosäkerheten i plan vid detaljmätning är ca 25 mm och ca 30 mm i höjd. Vid positionsbestämning i höjd gav 180 sekunder med få bakåtobjekt (3-5 st) en mindre avvikelse på ca 10 mm. Den största felkällan som påträffades är grova fel, dessa kan minimeras genom att kontrollera hur väl bestämda bakåtobjekten är skapade med N-RTK. Systematiska fel påträffades också och kan undvikas genom att hålla instrumenten servade och kalibrerade med jämna mellanrum. Det rekommenderas minst 5 bakåtobjekt med 10 sekunder tidsintervall vid RUFRIS, detta för att eliminera grova fel såsom bristande geometrisk spridning. iv
6 Abstract Real-time updated free station (RUFRIS) is a method used to perform geodetic measurements with total stations. The methodology is based on free stationing (resection) and uses back-sight point created in real-time with Network RTK (Real Time Kinematic). The practical use is beneficial in a variety of areas. The use of maintaining reference networks and control points may be neglected. The purpose of this study is to explore what uncertainty may be expected when performing measurements and station set-ups with RUFRIS when utilising geodetic instruments manufactured by Leica, Trimble and Topcon are utilised. Other studies have shown that increasing number of back-sights with RUFRIS results in decreasing uncertainty, which is also tested in this study. Different time interval for continuous data storage when determining the position of back-sight points with Network RTK has been used with the intervals of 10, 60 and 180 seconds. In combination with different number of back-sight points has RUFRIS station set-ups and detail measurements been executed. Reference points determined with long GNSS-measurement intervals socalled static measurement, with an observation time of 4 hours and 30 minutes. The raw data was sent to SWEPOS for post-processing for more accurate coordinates of the reference points, presented in SWEREF and RH2000 reference systems. Deviations of the observed measurements done with RUFRIS could then be determined, with aid of the reference points. The uncertainty of the station set-up is up to 40 mm horizontally and vertically, depending on length of time interval and number of back-sight points. Good geometric dispersion of back-sight points is also important to get a reliable station set-up. The horizontal measurement uncertainty that may be expected is about 25 mm and about 30 mm vertically. When using 180 seconds time interval with a few back-sight points (3-5) the deviation decreased to 10 mm. The largest source of error found is gross errors, these can be minimised by checking how well determined the back-sight points created with N-RTK are. Systematic errors were also found and can be avoided by keeping the instruments serviced and calibrated at regular intervals. To eliminate gross errors like lacking dispersion of back-sight points, it is recommended to use at least 5 back-sight points with a time interval of 10 seconds for station set-up and detail measurement. v
7 vi
8 Innehållsförteckning Förord...ii Sammanfattning... iv Abstract... v Innehållsförteckning... vii Terminologi... 1 Inledning Bakgrund Fri station Global Navigation Satellite Systems (GNSS) Realtidsuppdaterad fri station (RUFRIS) Geodetiska referenssystem Syfte Avgränsningar Teoretisk bakgrund Tidigare studier RTK-mätning Statisk mätning Noggrannhet Felkällor Material och metod Material Inställningar på mätningsinstrumenten Metod Placering av arbetsområdet Referenspunkter Positionering av bakåtobjekt Etablering och datainsamling med RUFRIS Satellitkonfiguration vid statisk mätning och RUFRIS Jämförelse av Nätverks-RTK vid stationsetablering Avvikelser-och spridningsmått Resultat Resultat från efterberäkning Resultat vid RUFRIS Avvikelser för stationsetablering vid RUFRIS Avvikelser för inmätning av detaljpunkt vid RUFRIS Diskussion Stationsetablering - resultat i plan Stationsetablering - resultat i höjd Detaljmätning resultat i plan Detaljmätning - resultat i höjd vii
9 5.5 Jämförelse från tidigare studier Slutsats Resultat i plan Resultat i höjd Felkällor Framtida studier Referenser Bilaga A... A Bilaga B... B Samtliga mätningar utförda vid RUFRIS... All data från Leica-mätningarna.... Alla data från Trimble-mätningarna... All data från Topcon-mätningarna.... Bilaga C... C Abslolut avvikelser från sant värde för stationsetableringar och inmätning av detaljpunkt... viii
10 Terminologi Bakåtobjekt Är en redan känd punkt som används för att koordinatbestämma totalstationen, s.k. etablering. Detaljpunkt Är en inmätt punk som skapas vid detaljmätning. Fri station Koordinatbestämning av totalstation (etablering) med ett antal bakåtobjekt med kända koordinater. GNSS Global Navigation Satellite Systems; är ett samlingsbegrepp för globala satellitsystem såsom GPS och GLONASS. HMK Handbok i mät- och kartfrågor; är en samling dokument från Lantmäteriet som ger stöd i diverse mät- och kartfrågor. N-RTK Network Real Time Kinematic; är en satellitbaserad positioneringsteknik som sker i realtid och korrigeras mot ett antal markbundna referensstationer. Observationstid Är den tidsintervall GNSS-mottagaren samlar in och lagrar observationer vid statisk mätning. Markeringsspik En fysisk spik som slås ner i hårdgjorda ytor och positionsbestäms för senare användning, som exempelvis referenspunkt. Referenspunkt Är väl koordinatbestämd fysisk punkt som används som referens. RH2000 Den svenska refernessystemet i höjd som använder NAP som nollnivå. I systemet anges endast höjdkoordinater med beteckningen h. RUFRIS Realtidsuppdaterad fri station; är en en etableringsmetod som bygger på fri station med bakåtobjekt skapade i realtid med N-RTK. SWEREF 99 Den svenska referenssystemet med realisering från Avser koordinater i plan (N, E). Tidsintervall Är den tidsintervall GNSS-mottagaren samlar in observationer vid N-RTK.
11 1 Inledning 1.1 Bakgrund Detta avsnitt presenterar en introduktion och bakgrund av den metodik som användes i denna studie tillsammans med syfte och avgränsningar Fri station Totalstation (TS) är ett av de vanligaste geodetiska mätningsinstrumenten och används för positionsbestämning av punkter i tre dimensioner. Instrumenten är mer noggranna än de nyare satellitbaserade positioneringsinstrumenten (GNSS), se kapitel En TS är i grunden en kombinerad teodolit och elektrooptisk avståndsmätare (EDM), som använder vinklar och avstånd för att skapa koordinatbestämda punkter i ett referenssystem. Traditionellt finns det två metoder för etablering av TS. TS:en centreras över en känd punkt och orienteras mot ett bakåtobjekt alternativt fri station (Horemuz & Vium-Andersson, 2011). Författarna beskriver att fri station är en metod för att georeferera TS:en i ett referenssystem med mätta avstånd (inbindning) och vinklar (inskärning) mot minst två kända bakåtobjekt, vilket även kallas etablering. För att uppnå en överbestämning bör tre bakåtobjekt användas vid positionsbestämning för det fria stationen. Enligt Horemuz & Jansson (2016) kan kvalitén av TS-etablering med RUFRIS utvärderas med hjälp av detaljmätning. Författarna förklarar också att den optimala placeringen av bakåtobjekt är med jämn spridning runt TS:en, detta medför en med noggrann och pålitlig stationsetablering Global Navigation Satellite Systems (GNSS) GNSS är ett generellt samlingsbegrepp för globala satellitsystem. Exempel på dessa är det amerikanska Global Positioning System (GPS), det ryska Globalnaya Navigatsionnaya Sputnikovaya Sistema (GLONASS) och det europeiska Galileo. GNSS används inom en rad olika verksamhetsområden exempelvis topografisk kartering, havsnavigering samt anläggning och konstruktion. Yang et al. (2011) förklarar att metoden bygger på att en inbindning skapas mellan satelliter i omloppsbana runt jorden och GNSS-mottagare. Genom att kombinera avstånd från satellit till GNSS-mottagare med information om satellitens position i omloppsbana går det att positionsbestämma GNSS-mottagaren. Mottagare som stödjer flerfrekvensband och konstellationer från de olika systemen resulterar i en mer robust användning, med fler synliga satelliter och lägre Delusion Of Precision (DOP). Varje system har sina egna klockfel, omloppsfel och koordinatfel. Felen kan förminskas med fler aktiva GNSS-konstellationer. Paziewski & Wielgosz (2016) beskriver att fördelarna med användning av flera satellitkonstellationer simultant ger 1
12 bl.a. högre noggrannhet, pålitlighet och tillgänglighet. Det är dessutom speciellt gynnsamt vid skymda miljöer, där risk för flervägsfel som försämrar positioneringen av GNSS-mottagare Realtidsuppdaterad fri station (RUFRIS) Utvecklingen av global satellitpositionering och Lantmäteriets SWEPOS RTK-tjänst har gjort det enklare att uppnå tillförlitliga bakåtobjekt i realtid vid fri stationsetablering. Den praktiska användningen av denna metod är förmånlig i flera verksamhetsområden, dels för behovet av att ajourhålla samt använda kända fixpunkter och passiva stomnät upphör. Brown et al. (2007) förklarar att detta medför en mer kostnadseffektiv lösning. Alternativ som nätutjämning och polygontåg som är mer tids-och resurskrävande kan uteslutas. Vium-Andersson (2011) beskriver att RUFRIS behöver minst 15 bakåtobjekt för att uppnå tillförlitlig noggrannhet. I denna studie har alla fri stationsetableringar beräknats med bakåtobjekt som positionsbestäms i realtid. Dessa betraktas som RUFRIS-etableringar. GPS och GLONASS används tillsammans i ett N-RTK. För positionsbestämning med N-RTK används SWEPOS fasta referensstationer för att reducera påverkan av felkällor på GNSS-mottagarens position. Bakåtobjekten mäts in och med avstånd och vinklar positionsbestäms totalstationen i 3D. Flertalet instrumenttillverkare har implementerat denna metod i sina instrument under olika benämningar exempelvis, Integrerad mätning eller Hybrid mätning Geodetiska referenssystem Det svenska referenssytemet Swedish Reference Frame 1999 (SWEREF 99) beskrivs av Lantmäteriet (2008) som ett geodetiskt referenssystem i plan, Northing och Easting (N, E). Systemet är en realisering genomförd år 1999 av det europeiska referenssystemet ETRS 89. SWEREF 99 består av 21 fasta referenspunkter som ingår i SWEPOS-referensnät. Idag används SWEREF 99 som nationell standard för koordinatbestämning och arkivering i plan. För tillämplig på lokal nivå för b.la kommunal verksamhetsutövning används lokala system, vilka bygger på projektioner som försummar avbildningsfel såsom skalförändring. Skalförändringen växer med ökad avstånd från medelmeridianen. Sverige är uppdelat i tolv lokala och ett nationell referenssystem SWEREF 99 TM. Det relativt nya referenssystemet i höjd (h), RH 2000 är implementerat i nästan alla kommuner i Sverige. Referenssystemet benämns ofta meter över havet och denna höjdyta sammanfaller nästan med geoiden. Lantmäteriet (2009) förklarar att geoiden har en oregelbunden form som bygger på jordens gravitationsfält, vilket också är oregelbundet. Geoiden kallas även för höjden av den orörda vattenytan och har likt 2
13 RH70 sin nollnivå definierad av Normaal Amsterdam Peil (NAP). Andra europeiska länder använder också NAP som nollnivå. RH2000 har sina normalhöjder redovisade från epok Syfte Hänvisning till Västerås Stad (Personlig kommunikation, 9:e mars 2017), Falu kommun (personlig kommunikation, 6:e mars 2017), Uppsala kommun (personlig kommunikation, 6:e mars 2017) används RUFRIS olika i landets kommuner och målet i denna studie är att skapa en övergripande syn över hur det kan användas. Syftet med denna studie är att utforska vilken mätosäkerhet som kan förväntas vid RUFRIS. Samt jämföra och utreda användningen av RUFRIS med hjälp av mätningsinstrument från Leica, Trimble och Topcon med avsikt att finna signifikanta avvikelser och belysa förekommande felkällor som kan uppstå. Ett antal frågeställningar har ställts för att reflektera syftet med denna studie, utifrån en generell testmiljö. Frågeställningar att besvara är följande: 1. Vilken mätosäkerhet kan förväntas vid etablering och detaljmätning vid användning av RUFRIS-metoden för respektive fabrikat? 2. Vilka är parametrarna och felkällorna som signifikant påverkar resultatet vid RUFRIS och hur kan de försummas? 3. Vilket är det optimala etableringssättet i förhållande till antalet bakåtobjekt och tidsintervall, skapade med N-RTK gentemot kommunal verksamhetsutövning? 4. Hur påverkar ökat tidsintervall vid RUFRIS-etablering med N-RTK, stationsnoggrannheten och detaljmätning ifall antalet bakåtobjekt minskar? 1.3 Avgränsningar Avgränsningar används för att hålla studien konkret och till ämnet. Liknande studier har tidigare utförts och redovisas i kapitel 2. Det finns vissa begränsningar i Leicas programvara SmartWorx och stationsetablering kommer endast att utföras med 3, 5 och 10 bakåtobjekt med Leica-instrument. Stationsetableringar med 10/15 bakåtobjekt kommer inte att utföras med 180 sekunder tidsintervall och etableringar med 25 bakåtobjekt kommer inte att utföras med 60 och 180 sekunder tidsintervall. 3
14 Placering av bakåtobjekter runt TS som Horemuz (2008) beskriver med radiell spridning av bakåtobjekt kommer inte att prövas. Författaren menar att i sektioner större än 200 gon runt TS gör radiell spridning oviktig. Den europeiska satellitsystemet Galileo är i bruk men dess bidrag till stationsetablering och detaljmätning med RUFRIS utforskas inte. Avstånd mellan bakåtobjekt och totalstation för respektive fabrikat berör inte denna studie, ej heller hur metodiken fungerar i svåra miljöer. 4
15 2 Teoretisk bakgrund RUFRIS är en relativt ny metod och det finns få studier som tar upp användning mot ett specifikt ändamål. Benämningen är kontroversiell då det finns vissa krav som måste uppfyllas med metodiken (se 2.1). 2.1 Tidigare studier RUFRIS-metodiken är beskriven av Horemuz (2008) som uttrycker att minst 15 bakåtobjekt måste användas för att uppnå tillförlitlig positionsnoggrannhet. I Horemuz studie kallas bakåtobjekt skapade med N-RTK för gemensamma punkter (GP). Den skapade GP mäts in mot monterad prisma och med hjälp av vertikalvinkel, lutande längd och horisontalvinkel beräknas positionen av totalstationen. Författaren redovisar ett medelfel på 3 mm i plan och 2,4 mm i höjd vid stationsetablering med 30 bakåtobjekt. Vid detaljmätning påträffades ett medelfel på 6 10 mm i plan och 3 5 mm i höjd, beroende på avstånd från totalstation ( meter) RTK-mätning Positionsbestämning i realtid med metoden Real-Time Kinematic (RTK) är en mer komplicerad process menar Feng, Gu, Shi & Rizos (2013). Information skickas i det strömmande informationsformatet RTCM till mottagare. Vid positionsbestämning med RTK måste samma typ av parametrar beaktas som vid statisk mätning. RTK ger en betydligt sämre positionsbestämning än statisk mätning och har utvecklats ytterligare för att minimera signifikanta felkällor, s.k. N-RTK. N-RTK är en relativ positionsbestämning som skickar korrektioner av exempelvis satellitbanor och klockfel i realtid. N-RTK använder korrektioner från markbundna referensstationer. Dessa korrektioner motverkar bl.a. jonosfäriska och troposfäriska felparametrar. I föreliggande studie används statisk mätning för att kontrollera stationsetablering och detaljmätning som är utförd med RUFRIS Statisk mätning Feng et al. (2013) beskriver i sin studie att statisk mätning är en satellitbaserad mätningsmetod som tar in råa satellitobservationer under ett längre tidsintervall. Informationen skickas i standardformatet Receiver Independent Exchange (RINEX). RINEX kräver efterberäkning av olika parametrar för att få en mer exakt position. Det förekommer parametrar som bektas i efterberäkningen vid statisk mätning exempel på dessa är exakt mottagningstid samt fördröjningar igenom troposfären och jonosfären. 5
16 2.1.3 Noggrannhet Det finns i dagsläget inga tydliga regelverk för hur kommuner använder RUFRIS. Eventuellt kan färre bakåtobjekt användas vid lägre noggrannhetskrav, exempelvis vid kommunal detaljmätning. HMK-Geodatakvalitet (2015) beskriver olika standardnivåer av kartering mot olika ändamål. HMK-standardnivå 3 för projektinriktad mätning och kartläggning har ett krav på 50 mm i plan och höjd. Enligt HMK-Ge:Terrester detaljmätning (2016) krävs minst 3 bakåtobjekt för att uppfylla en överbestämning per obekant. De lyfter även fram att fler bakåtobjekt vid stationsetableringar minskar osäkerheten för positioneringen av TS (s. 19). Fördelen med RUFRIS är att kunna mäta med totalstation där GNSS inte fungerar p.g.a. skymda satelliter. Vid detaljmätning beskriver HMK-Ge: Terrester detaljmätning (2016) och Horemuz (2008) att minst 20 30% av de skapade bakåtobjekt bör placeras på samma avstånd eller längre bort än de detaljpunkter som ska mätas in för att hålla god noggrannhet. I Fridén & Persson (2009) studie har tio bakåtobjekt använts för RUFRIS-etablering med fem RTK-observationer för respektive bakåtobjekt medförde ett medelfel på 7 mm i plan och 11 mm i höjd. Värt att notera är att ett projektanpassad N-RTK användes i studien, som är ett område med förtätade SWEPOS-referensstationer (ytterligare 5 stationer i det här fallet) för att skapa en förstärkt realisering av referenssystemet i stora Trafikverksprojekt. Horemuz & Andersson-Vium (2011) rekommenderar i sin mer omfattande studie att bakåtobjekt bör användas för att uppnå en skälig precision vid stationsetablering. Vid lägre precisionskrav bör minst sex bakåtobjekt användas. I Mårtensson, Reshetyuk & Jivalls (2012) studie utforskas mätosäkerheten vid positionsbestämning av terrester laserskanner med N-RTK. Författarna testade tidsintervall på 1 5 minuter och konstaterade att ett tidsintervall på en minut är tillräcklig för att uppnå en mätosäkerhet på mindre än 10 mm i plan och 16 mm i höjd. Jansson & Lundgren-Nilsson (2015) har bemött frågor kring stomnätsstrategi från ett kommunalt perspektiv och i sin studie testat tre olika metoder för att bestämma stomnätspunkter. De har valt att utvärdera GNSS-mätning med N-RTK med tidsintervallerna, 1 och 180 sekunder/observationer men även integrerad mätning (RUFRIS). I den integrerade mätningen användes tre bakåtobjekt som skapades med ett medelvärde från 10 sekunder observationer. Detta medförde en spridning av punkter på ± 0,1 m i plan och 0,25 m i höjd kring medelvärdet. Intressant är att 6
17 spridningen av punkter med 180 sekunder tidsintervall är ± ca 0,015 m i plan och 0,04 m i höjd Felkällor Horemuz (2008) menar att det finns ett flertal felkällor som ökar mätosäkerhet i plan vid stationsetableringen. Exempelvis ojämn spridning av bakåtobjekt kring totalstationen. Horemuz (2011) menar också att den största felkällan vilar på noggrannheten av GNSS-inmätning av bakåtobjekt vid stationsetablering. Flervägsfel, atmosfäriska fel och satellitkonfiguration är viktiga parametrar för att uppnå god stationsetablering. Dock beskrivs inte antalet observationer (tidsintervall) tagna med GNSS-mottagare för respektive GP, vilket görs i föreliggande studie. 7

18 c 3 Material och metod 3.1 Material I denna studie jämförs mätningsinstrument från Leica, Trimble och Topcon mot varandra. Dessa instrumentset består av en totalstation, en GNSS-mottagare som stödjer GPS och GLONASS satellitkonstellationer och fältdator med tillgång till SWEPOS RTK-tjänst. Tabell 1. Modeller av mätningsinstrument som testats. Mätningsinstrument Leica Trimble Topcon Totalstation: Leica TS15 Trimble S8 Topcon GT-1001 GNSS-mottagare: Leica GS14 Trimble R10 Topcon HiPer SR Fältdator: Leica CS15 Trimble TSC3 Topcon FC-500 Figur 1. Totalstationen Leica TS15, Trimble S8 och Topcon GT som användes i denna studie. Samtliga totalstationer är bland de modernaste från respektive fabrikat och är snarlika i prestanda men har olika förutsättningar i form av vikt, batteritid etc. Följande specifikationer erhålls i fabrikanternas informationsblad (Leica Geosystem, Topcon Positioning, 2017 & Trimble Navigation, 2016). 8

19 Tabell 2: Totalstationernas tekniska specifikationer. Totalstation: Leica TS15 Trimble S8 Topcon GT-1001 Prestanda mot prisma: Standard: 1 mm + 1,5 ppm Standard: 2 mm + 2 ppm Standard: 1 mm + 2 ppm Snabb: 2 mm +1,5 ppm Vid kontinuerliga mätningar (tracking): 3 mm + 1,5 ppm Standardavvikelse enligt ISO : 1 mm + 2 ppm Vid kontinuerliga mätningar (tracking): 4 mm + 2 ppm Vinkelnoggrannhet: 1 (0,3 mgon) 1 (0,3 mgon) 1 (0,3 mgon) Mättid mot prisma: Ca 2,4 sekunder standard & ca 0,8 vid snabb 1,2 sekunder 0,9 sekunder IP-skydd: IP55 IP55 IP65 Batterityp och Litium jon Litium jon ca 6,5 Upp till 4 timmar batteritid: mellan 5 och timmar 8 timmar Vikt: 4,9 5,5 kg 5,25 kg 5,5 kg ink. Trefot Värt att notera är att GT-1001 ingår i GT-1000 serien och får namnet från att vinkel noggrannheten är 1 (bågsekunder). GT-1002 har vinkelnoggrannhet 2 (bågsekunder) ect. Figur 2. Leica GS14, Trimble R10 och Topcon HiPer SR som användes i denna studie. 9
20 Tabell 3. Följande specifikationer redovisade i informationsblad är hämtad från Leica Geosystems, Topcon Positioning, 2017 & Trimble Navigation, GNSS-mottagare Leica GS14 Trimble R10 Topcon HiPer SR Stöd av GNSS: GPS GLONASS Galileo BeiDou SBAS: WAAS, EGNOS, GAGAN, MSAS QZSS GPS GLONASS SBAS Galileo BeiDou GPS GLONASS SBAS QZSS Antal kanaler: 120 kanaler uppgraderbar till 240 kanaler Noggrannhet vid statisk mätning Statisk mätning Horisontellt: 3 mm + 0,1 ppm Vertikalt: 3,5 mm + 0,4 ppm Trimble Maxwell 6 Custom Survey GNSS chips 440 kanaler Statisk mätning Horisontellt: 3 mm + 0,1 ppm Vertikalt: 3,5 mm + 0,4 ppm Vanguard Technology med Universal Tracking 226 kanaler Statisk mätning Horisontell: 3,0 mm + 0,1 ppm Vertikalt: 3,5 mm + 0,4 ppm Snabb statisk mätning: Horisontellt: 3 mm + 0,5 ppm Vertikalt: 5 mm ppm Snabb statisk mätning: Horisontellt: 3 mm + 0,5 ppm Vertikalt: 5 mm + 0,5 ppm Snabb statisk mätning Horisontell: 3,0 mm + 0,4 ppm vertikalt: 5,0 mm +0,6 mm Noggrannhet vid RTK-mätning Horisontellt: 8 mm + 0,5 ppm Vertikalt: 15 mm + 0,5 ppm Horisontellt: 8 mm + 1 ppm Vertikalt: 15 mm + 1 ppm Horisontellt: 10 mm + 0,8 mm Vertikal: 15 mm +1,0 ppm IP-skydd IP68 IP67 IP67 Batterityp och Litium jon: 5 7 Litium jon: 3,7 Upp till 20 timmar batteritid: timmar 5,5 timmar Vikt: 0,93 kg 1,12 kg 0,925 kg Tillhörande kringutrustning som stativ, batterier, stänger och prismor användes med mätningsinstrumenten. Tillsammans med markeringsspik, hobbyfärg, stakkäppstöd och singnalkäppar. Mjukvaran som används i Leicas fältdator CS15 är Leica SmartWorx version 5.70, denna programvara stödjer inte fler än tio bakåtobjekt. Annan mjukvara från Leica Geosystems måste införskaffas för att nyttja fler bakåtobjekt, exempelvis Geopad. Trimbles fältdator TSC3 använder Trimble Access version (6177). Trimble-instrumenten använder äldre mjukvara och har inte varit servade som de andra instrumenten i denna studie. Kalibrering av totalstationen har dock utförts i Trimble Access. Detta kan fortfarande resultera i större avvikelser än normalt. Topcon FC-500 använder MAGNET Field
. För varje stationsetablering mättes detaljpunkten (prismat) in i två cirkellägen.")
21 För att simulera detaljmätning utförda från stationsetableringarna användes en Leica 360 prisma (GRZ121) med en prismakonstant på -11,3 mm. Prismat monterades på stativ med optisk centrering över referenspunkt (figur 3). För varje stationsetablering mättes detaljpunkten (prismat) in i två cirkellägen. Syftet med detaljpunkten är att ge en mer fullständig bild av kvalitén för varje stationsetableringen. Detaljpunkten placerades inom arbetsområdet på ca 15 meter avstånd från totalstationen, se Figur 3. Leica 360 prisma (GRZ121) monterad på stativ över referenspunkt Inställningar på mätningsinstrumenten För att få ett enhetligt resultat har alla GNSS-mottagare samma inställningar vid mätningar med N-RTK. Samtliga mätningar med N-RTK utfördes med GPS och GLONASS-satellitsystem, med stöd från SWEPOS markbundna referensstationer. En elevationsvinkel på 13 användes med ett PDOP-värde på 4,0. SWEPOS- Lantmäteriet (u.å) rekommenderar en elevationsvinkel på vid N-RTK mätning. Vid kontinuerlig datainsamling för positionsbestämning av bakåtobjekt användes tidsintervallerna 10, 60 och 180 sekunder. På rekommendation från Dan Norin (personlig kommunikation, 28 april 2017) från Lantmäteriet, har en observationstid på 4 timmar och 30 minuter använts vid statisk mätning. Minst 4 timmars observationstid bör användas vid lagring av rå observationsdata menar han. I HMK-Ge:Stommätning (2016) är det också beskrivet vilken observationstid som bör användas gentemot lägesnoggrannhetskrav och ändamål. Sedan juni 2016 har SWEPOS stöd för GLONASS-signaler i sina efterberäkningar och har nyttjats vid beräkning av referenspunkternas position. En elevationsmask på 11

22 15 användes. Information från satelliter belägna utanför elevationsmasken ingick inte i SWEPOS-efterberäkning. SWEPOS använder ett loggningsintervall på 30 sekunder i sina beräkningar och i denna studie har 15 sekunder loggningsintervall använts, vilka är jämt delbara. Satellitkonfiguration och PDOP vid samtliga mätningar finns redovisade i avsnitt Metod Placering av arbetsområdet Arbetsområdet för studien är placerad bakom teknikparken nordväst om Högskolan i Gävle. Figur 4. Rutan visar arbetsområdet vid teknikparken, där studien utfördes (GOOGLE MAPS, 2017). Arbetsområdet valdes från ett antal kriterier: Stor asfaltsyta för att kunna slå ner fysiska referenspunkter, minst 400 m 2. Öppen yta med fri sikt mellan totalstation och prisma. Ostört område med liten/ingen trafik som kan störa studien med vibbrationer eller liknande Referenspunkter Arbetsområdet definierades med referenspunkter markerade i asfalt med markeringsspik. Först stegades området upp och centrumpunkten för totalstationens (Ref tot ) uppskattade läge konstaterades. Markeringsspik slogs ner för totalstationens läge och placeringen av den norra punkten (Ref norr ) mättes med måttband. Ref norr 12

 och norra referenspunkterna (Ref norr ) användes för att konstruera koordinater för väst (Ref vast ), syd (Ref syd ), ost (Ref ost ) samt detaljpunktens (Ref")
23 markerades också med markeringsspik och mättes in med N-RTK med 10 sekunder tidsintervall tillsammans med Ref tot (se figur 5). För inmätning med N-RTK användes Leica Viva GS 14 med GNSS-stång och tillhörande handenhet. Figur 5. Referenspunkt markerad i asfalt med markeringsspik med 12 mm i diameter. Totalt skapades sex referenspunkter som markerades med markeringsspik. Figur 6 visar den planerade positionen av referenspunkterna. Koordinater för totalstationen (Ref tot ) och norra referenspunkterna (Ref norr ) användes för att konstruera koordinater för väst (Ref vast ), syd (Ref syd ), ost (Ref ost ) samt detaljpunktens (Ref dp ) placering. De konstruerade placeringarna skapades i programvaran SBG Geo och markerades med markeringsspik i fält. Figur 6. Planerad placering av referenspunkter med totalstationen i centrum. 13
24 För att positionsbestämma referenspunkterna användes statisk mätning, se avsnitt Positionering av bakåtobjekt Stationsetableringar med Leica, Topcon, och Trimble-fabrikat utfördes med 3, 5, 10, 15 och 25 bakåtobjekt. Leica-instrumentet etablerades med endast tio bakåtobjekt. Vid tio bakåtobjekt användes något bristande spridning, detta för att se ifall en ökad avvikelse påträffas i förhållande till stationsetablering med 5 bakåtobjekt med god spridning (figur 9). Pilarna i figurerna 7 11 illustrerar avståndsmätning och de två markeringarna på siktlinjerna visar vinkelmätning från totalstation. Underlag för placering av bakåtobjekt med god spridning skapades i SBG Geo. Figur 7. Stationsetablering med tre bakåtobjekt kring totalstationen med en jämn spridning på 133 gon, på 20 meters avstånd. Figur 8. Stationsetablering med fem bakåtobjekt kring totalstationen med en jämn spridning på 80 gon på 20 meters avstånd. 14
25 Figur 9. Stationsetablering med tio bakåtobjekt användes endast med Leica. I en sektion på 240 gon kring totalstationen med en spridning på 26 gon mellan bakåtobjekten, på 20 meters avstånd. Figur 10. Stationsetablering med 15 bakåtobjekt kring totalstationen med en spridning på 26 gon, på 20 meters avstånd. 15
26 Figur 11. Stationsetablering med 25 bakåtobjekt kring totalstationen med en varierande spridning mellan bakåtobjekten, på 20 meters avstånd. Punkterna sattes ut med N-RTK och markerades med hobbyfärg på asfalten. Olika markeringar användes för att urskilja vilka punkter som användes med varandra t.ex. vid stationsetablering med 5 bakåtobjekt Statisk mätning med Leica Viva GS 14 Referenspunkterna utgör grunden för att kontrollera RUFRIS-etableringar och detaljmätning. Referenspunkterna koordinatbestämdes med 4 timmar och 30 minuter statisk mätning med Leica Viva GS14 GNSS-mottagare. De första statiska mätningarna började kl 08:45 den 6:e maj 2017 och avslutades kl 13:45. Den andra mätningen utfördes för Ref norr, Ref ost, Ref vast kl 16:40 och avslutades kl 21:10 den 11:e maj Mätningarna utfördes med GNSS-mottagare monterad på stativ (figur 12). Antennhöjd och antennmodell är viktiga parametrar för efterberäkningen och noterades ner. Antennhöjden mättes med Leicas höjdmätare och ett tillägg i höjd på 0,36 m adderades senare i programvara. Observationsdata lagrades i MBA (Leica format) på Leica CS15 fältdator. Filerna importerades till Leica Goe Office (LGO), där de tidigare nämnda parametrarna kontrollerades. Data exporterades till RINEX-2 format och skickades till SWEPOSefterberäkningstjänst för efterberäkning. Koordinaterna för referenspunkterna är redovisade i kapitel

27 Figur 12. Statisk mätning utfördes med en 4 timmar och 30 minuter lång observationstid vid två tillfällen Etablering och datainsamling med RUFRIS Datainsamlingen med RUFRIS-metodiken utfördes med tidsintervallerna 10, 60 och 180 sekunder. Mätningarna påbörjades först med Trimble-instrument och sedan Topcon-instrument kl 09:00 den 9:e maj Mätningar med Leica-instrument utfördes den 19:e maj med start kl 10:15. Totalstation monterades på ett stativ och centrerades över referenspunkten Ref tot. Instrumenthöjden kontrollerades med måttband och kontrollerades inför varje stationsetablering. En Leica 360 -prisma monterad på stativ centrerades över referenspunkten Ref dp. Prismahöjden mättes med Leica GZS4 höjdmätare och en höjd på 0,4102 m adderades för att få den korrekta prismahöjden. Stationsetableringar utfördes med GNSS-mottagare monterade på lodstav med prisma. Prismahöjden som användes vid skapande av bakåtobjekt var 2,0 m. Differensen mellan prisma och antennhöjd för skapade bakåtobjekt med respektive fabrikat fanns fördefinierade i fältdatorerna och kontrollerades dessutom med måttband. Vid bakåtpunkter skapade med 10 sekunder tidsintervall användes signalkäppar för att hålla GNSS-mottagarna i lod över asfaltsmarkeringar. Vid positionsbestämning med med 60 och 180 sekunder tidsintervall användes stakkäppstöd (figur 13). Detta för att simulera ett mer förväntat resultat vid användning av RUFRIS. 17

28 Figur 13. Trimble R10 monterad på lodstav med prisma uppsatt över asfaltsmarkering med stakkäppsstöd. För samtliga fabrikat utfördes RUFRIS med först 3 bakåtobjekt, sedan 5, 10/15, 25 bakåtobjekt beroende på tidsintervall och fabrikat. Etableringar utfördes sedan i samma sätt med samtliga fabrikat. Efter varje stationsetablering mättes detaljpunkten in i två cirkellägen. För att skapa oberoende mätningar mellan stationsetableringarna startades GNSS-mottagaren om. Leicas SmartWorx saknar stöd för fler än 10 bakåtobjekt, därför användes 10 bakåtobjekt istället för 15 och ingen etablering utfördes med 25 bakåtobjekt. Hur antalet bakåtobjekt användes med olika tidsintervall visas i tabell 4. Det var inte praktiskt genomförbart att utföra stationsetableringar med 10 eller fler bakåtobjekt med 180 sekunder tidsintervall, då en stationsetablering skulle ta minst 60 minuter att utföra. Tabell 4. Tidsintervallen som användes med antalet bakåtobjekt. Utförda stationsetableringar med Leica, Trimble & Topcon 10 sekunder tidsintervall 60 sekunder tidsintervall 180 sekunder tidsintervall 3 bakåtobjekt X X X 5 bakåtobjekt X X X 10/15 bakåtobjekt X X - 25 bakåtobjekt X - - Den insamlade data exporterades till LandXML och ASCII-filformat. Även rådata från de utförda mätningarna exporterades. LandXML-filerna importerades till SBG Geo och kontrollerades. För Trimble och Topcon skapades nio stationsetableringar vardera och åtta med Leica. Totalt skapades 26 stationsetableringar med 52 inmätningar av detaljpunkt och 212 bakåtobjekt. Se bilaga B för all insamlad data vid RUFRIS-metodiken. 18
29 Vid stationsetablering med 25 bakåtobjekt mättes fyra av bakåtobjekten över Ref norr, Ref ost, Ref vast, Ref syd. Dessa punkter användes för att visa hur punkter skapade med N-RTK avviker från referenspunkterna, se Satellitkonfiguration vid statisk mätning och RUFRIS I detta kapitel redovisas antalet satelliter och PDOP i Gävle vid utförda mätningar, från SWEPOS satellitprediktion enligt figurerna Satellitprediktion vid statisk mätning - 6:e maj : ,8 09: ,6 09:45 10: ,4 1,6 10:45 11: ,4 1,4 11: ,8 12: ,3 12: ,5 13: ,8 13:45 16 Antal satelitter 1,5 PDOP Figur 14. Antalet satelliter tillgängliga och PDOP vid statisk mätning den 6:e maj med 15 elevationsmask. 19
30 Satellitprediktion vid statisk mätning - 11:e maj : ,6 17:00 17: ,7 1,5 18: ,5 18: ,9 19: ,9 19: ,4 20: ,3 20: ,3 21: ,7 21:30 15 Antal satelitter 1,4 PDOP Figur 15. Antalet satelliter tillgängliga och PDOP vid statisk mätning den 11:e maj med 15 elevationsmask. Satellitprediktion vid RUFRIS - 9:e maj :00 09:30 10:00 10:30 11:00 11:30 12:00 12:30 13:00 13:30 14:00 14:30 15:00 15:30 16:00 16:30 17:00 17:30 18:00 18:30 19:00 19:30 20:00 20:30 21: , , ,6 1,8 1,4 1,5 1,5 1,3 1,4 1,5 1,5 1,5 1,4 Antal satelitter 1,3 1,5 1,5 1,4 1,4 PDOP 1,3 1,3 1,3 1,6 1,6 1,4 1,3 Figur 16. Antalet tillgängliga satelliter och PDOP i Gävle vid RUFRIS-etablering med Trimble och Topcon den 9:e maj, med 13 elevationsvinkel. 20
31 Satellitprediktion vid RUFRIS - 19:e maj :00 10:30 11: ,3 1,4 1,6 11: ,2 12: ,5 12: ,3 13: ,6 13:30 16 Antal satelitter 1,4 PDOP Figur 17. Antalet satelliter tillgängliga satelliter i Gävle vid RUFRIS-etablering med Leica den 19:e maj, med 13 elevationsvinkel Jämförelse av Nätverks-RTK vid stationsetablering Syftet med detta kapitel är att se ifall avvikelserna av bakåtobjekt återspegla avvikelserna för stationsetableringarna. Bakåtobjekt skapades över referenspunkterna Ref norr, Ref ost, Ref vast och Ref syd vid stationsetablering med Leica, Trimble och Topcon. För Trimble och Topcon gjordes detta vid etablering med 25 bakåtobjekt (10 sek). För Leica skapades en enskild stationsetablering med endast fyra bakåtobjekt. Dessa bakåtobjekt var också placerade över referenspunkterna och endast signalkäppar användes för att hålla GNSS-mottagare i lod med 10 sekunder tidsintervall. 21
32 Tabell 8. Avvikelser för bakåtobjekt skapades över dem sprida referenspunkterna. Endast 4 bakåtobjekt användes vid stationsetablering. Leica Avvikelser för bakåtobjekt skapade med Nätverks-RTK i meter. Northing Easting Höjd (h) (N) (E) Ref norr 0,017-0,021 0,015 Ref ost 0,008-0,006 0,026 Ref vast -0,008 0,022 0,057 Ref syd 0,001-0,011 0,019 Avvikelser för stationsetablering (Ref tot ) 0,013-0,015-0,005 Tabell 9. Avvikelser för bakåtobjekt skapades över de sprida referenspunkterna. Stationsetablering utfördes med 25 bakåtobjekt med Trimble. Trimble Avvikelser för bakåtobjekt skapade med Nätverks-RTK mot referenspunkter i meter. Northing Easting Höjd (h) (N) (E) Ref norr 0,017 0,010-0,012 Ref ost -0,011 0,002-0,014 Ref vast -0,013 0,022 0,027 Ref syd 0,016-0,018-0,002 Avvikelser för stationsetablering (Ref tot ) 0,009-0,012-0,029 Tabell 10. Avvikelser för bakåtobjekt skapades över dem sprida referenspunkterna. Stationsetableringen utfördes med 25 bakåtobjekt med Topcon. Topcon Avvikelser för bakåtobjekt skapade med Nätverks-RTK i meter. Northing Easting Höjd (h) (N) (E) Ref norr 0,001-0,012-0,012 Ref ost -0,006-0,001 0,016 Ref vast -0,015 0,017 0,063 Ref syd 0,005-0,011 0,011 Avvikelser för stationsetablering (Ref tot ) 0,010-0,006 0,006 Stor vikt för att uppnå en högre lägesnoggrannhet för stationsetableringar vilar på hur väl bestämda bakåtobjekt är med N-RTK. Generellt visar stationsetableringar en mindre avvikelse än de enskilda bakåtobjekt skapade med N-RTK. Detta är p.g.a. att stationsetableringarna använder ett medelvärde av samtligt bakåtobjekt. 22
33 3.3 Avvikelser-och spridningsmått Avvikelse är det totala mätfelet från sant värde och presenteras i meter. Beräkningar utförs på koordinater för observerat värde d.v.s. koordinater för stationsetableringar och inmätning av detaljpunkt med RUFRIS. Sant värde motsvarar referenspunkter som har positionsbestämts noggrant med statisk mätning. Ohlsson (2014) presenterar formler som har använts i denna studie. Beräkningarna utfördes för enskild koordinat (N, E, h) för respektive fabrikat. För beräkning av avvikelser från sant värde användes: ( ) (1) där x i är observerat värde och X är sant värde. Planavvikelserna (N) och (E) lades sedan samman till en radiell avvikelse enligt följande formel: (2) där plan motsvarar radiell avvikelse. Resultatet redovisas med absoluta avvikelse från sant värde. Avvikelse i höjd (h) presenteras tillsammans med radiell avvikelse i kapitel Root mean square (RMS) motsvarar medelfel och är en summering av spridning kring de kända koordinaterna och beräknades med formeln nedan: ( ) ( ) (3) Där är en summering av avvikelser i en serie mätningar. Mätserierna är uppdelade i bakåtobjekt och tidsintervall. Detta för att kunna ge en överskådlig bild över hur de olika parametrarna påverkar avvikelserna. Beräkning av avvikelser och medelfel utfördes i Microsoft Excel. 23
34 4 Resultat I detta kapitel redovisas resultat från fältmätning med statisk mätning och RUFRIS. Alla koordinater är redovisade i SWEREF och RH2000 referenssystem. 4.1 Resultat från efterberäkning Resultatet från SWEPOS-efterbräkningstjänst för noggrann positionsbestämning av referenspunkter redovisas nedan. Tabell 11. Resultatet från SWEPOS-efterbräkningstjänst för referenspunkterna i SWEREF och RH2000. Referenspunkter: N E h (m) Grundmedelfel RMS (mm) (mm) Ref tot , ,760 19,998 2,74 1,0 Ref dp , ,139 19,851 2,87 1,0 Ref norr , ,39 19,976 3,01 1,2 Ref ost , ,289 19,991 2,34 1,1 Ref vast , ,201 20,013 6,31 1,4 Ref syd , ,329 19,823 3,52 1,0 Samtliga referenspunkter redovisar koordinater i N, E, h tillsammans med gränsvärdena grundmedelfel och RMS. Dessa gränsvärden är beräknade på ett antal baslinjer från SWEPOS fasta referensstationer (A-stationer) i 3D. A-stationer är s.k. fundamentalstationer som realiserar den nationella referenssystemet SWEREF 99 i Sverige. För att uppnå referenspunkter med ett medelfel på < 1 cm i plan och < 1,5 2 cm höjd gäller b.la att grundmedelfel vid helmertstransformation inte överstiger 10 mm samt att RMS för slutlig fixlösning inte överstiger 3 mm. Resultatet från SWEPOSefterberäkningtjänst visar att referenspunkterna är väldefinierade. 24
35 Avvikelser i meter 4.2 Resultat vid RUFRIS I detta kapitel redovisas avvikelser från sant värde i plan och höjd för stationsetablering och inmätning av detaljpunkt med RUFRIS-metodiken. Resultatet är redovisad i förhållande mot de två parametrarna, tidsintervall och bakåtobjekt. Denna studie redovisar förväntad mätresultat utifrån satta frågeställningar för RUFRIS. Referenspunkter Ref tot och Ref dp har använts för att beräkna avvikelser och är beskrivet i kapitel 3.3. Resultat redovisas i figurerna som är indelade i två avsnitt, presenterar avvikelser för stationsetablering med RUFRIS och presenterar avvikelser för inmätning av detaljpunkt. Avvikelser i northing, easting och höjd är redovisade tillsammans med radiell avvikelse (plan). Radiell avvikelse beräknades med formel (2) i kapitel 3.3 och motsvarar avvikelse i plan. Det redovisade resultatet i kapitel 4.2 diskuteras och utvärderas i kapitel 5, det finns även redovisade som tabeller i bilaga C Avvikelser för stationsetablering vid RUFRIS 0,045 0,04 0,035 0,03 0,025 0,02 0,015 0,01 0,005 0 Stationsetablering med 10 sek tidsintervall Avvikelser (m) med 3 och 5 bakåtobjekt Northing (N) Easting (E) Radiell avvikelse Höjd Leica - 3 bo 0,012 0,012 0,017 0,000 Topcon - 3 bo 0,026 0,013 0,029 0,008 Trimble - 3 bo 0,034 0,026 0,043 0,014 Leica - 5 bo 0,011 0,013 0,017 0,030 Topcon - 5 bo 0,011 0,011 0,016 0,021 Trimble - 5 bo 0,024 0,005 0,025 0,026 Figur 18. Avvikelser för stationsetablering med 10 sek tidsintervall samt 3 och 5 bakåtobjekt vid RUFRIS. 25
36 Avvikelser i meter Avvikelser i meter 0,04 0,035 0,03 0,025 0,02 0,015 0,01 0,005 0 Stationsetablering med 10 sek tidsintervall Avvikelser (m) med 10/15 och 25 bakåtobjekt Northing (N) Easting (E) Radiell avvikelse Leica - 10 bo 0,013 0,012 0,018 0,017 Topcon - 15 bo 0,006 0,007 0,009 0,006 Trimble - 15 bo 0,013 0,008 0,015 0,018 Höjd Topcon - 25 bo 0,010 0,006 0,012 0,006 Trimble - 25 bo 0,009 0,012 0,015 0,029 Figur 19. Avvikelser för stationsetablering med 10 sek tidsintervall samt 10/15 och 25 bakåtobjekt vid RUFRIS. 0,035 0,03 0,025 0,02 0,015 0,01 0,005 0 Stationsetablering med 60 sek tidsintervall Avvikelser (m) med 3, 5 och 10/15 bakåtobjekt Northing (N) Easting (E) Radiell avvikelse Höjd Leica - 3 bo 0,018 0,01 0,021 0,007 Topcon - 3 bo 0,026 0,017 0,031 0,002 Trimble - 3 bo 0,01 0,014 0,017 0,012 Leica - 5 bo 0,016 0,016 0,023 0,003 Topcon - 5 bo 0,007 0,007 0,01 0,023 Trimble - 5 bo 0,007 0,017 0,018 0,008 Leica - 10 bo 0,024 0,013 0,027 0,001 Topcon - 15 bo 0,016 0,01 0,019 0,033 Trimble - 15 bo 0,014 0,006 0,015 0,003 Figur 20. Avvikelser för stationsetablering med 60 sek tidsintervall samt 3, 5 och 10/15 bakåtobjekt vid RUFRIS. 26
37 Avvikelser i meter Avvikelser i meter 0,045 0,04 0,035 0,03 0,025 0,02 0,015 0,01 0,005 0 Stationsetablering med 180 sek tidsintervall Avvikelser (m) med 3 och 5 bakåtobjekt Northing (N) Easting (E) Radiell avvikelse Höjd Leica - 3 bo 0,028 0,02 0,034 0,004 Topcon - 3 bo 0,021 0,008 0,022 0,009 Trimble - 3 bo 0,028 0,019 0,029 0,027 Leica - 5 bo 0,02 0,018 0,027 0,004 Topcon - 5 bo 0,012 0,01 0,016 0,019 Trimble - 5 bo 0,02 0,007 0,042 0,012 Figur 21. Avvikelser för stationsetablering med 180 sek tidsintervall samt 3 och 5 bakåtobjekt vid RUFRIS Avvikelser för inmätning av detaljpunkt vid RUFRIS 0,045 0,04 0,035 0,03 0,025 0,02 0,015 0,01 0,005 0 Inmätning av detaljpunkt med 10 sek tidsintervall Avvikelser (m) med 3 och 5 bakåtobjekt Northing (N) Easting (E) Radiell avvikelse Höjd Leica - 3 bo 0,003 0,001 0,003 0,013 Topcon - 3 bo 0,02 0,011 0,023 0,016 Trimble - 3 bo 0,009 0,035 0,036 0,002 Leica - 5 bo 0,004 0,011 0,012 0,042 Topcon - 5 bo 0,008 0,005 0,009 0,033 Trimble - 5 bo 0,005 0,011 0,012 0,01 Figur 22. Avvikelser för inmätning av detaljpunkt med 10 sek tidsintervall samt 3 och 5 bakåtobjekt vid RUFRIS. 27
38 Avvikelser i meter 0,05 0,045 0,04 0,035 0,03 0,025 0,02 0,015 0,01 0,005 0 Inmätning av detaljpunkt med 10 sek tidsintervall Avvikelser (m) med 10/15 och 25 bakåtobjekt Northing (N) Easting (E) Radiell avvikelse Höjd Leica - 10 bo 0,001 0,001 0,001 0,029 Topcon - 15 bo 0,01 0,006 0,012 0,035 Trimble - 15 bo 0,006 0,028 0,029 0,034 Topcon - 25 bo 0,024 0,019 0,031 0,000 Trimble - 25 bo 0,002 0,001 0,002 0,045 Figur 23. Avvikelser för inmätning av detaljpunkt med 10 sek tidsintervall samt 10/15 och 25 bakåtobjekt vid RUFRIS. 28
39 Avvikelser i meter Avvikelser i meter 0,045 0,04 0,035 0,03 0,025 0,02 0,015 0,01 0,005 0 Inmätning av detaljpunkt med 60 sek tidsintervall Avvikelser (m) med 3, 5 och 10/15 bakåtobjekt Northing (N) Easting (E) Radiell avvikelse Höjd Leica - 3 bo 0,001 0,012 0,012 0,005 Topcon - 3 bo 0,018 0,006 0,019 0,010 Trimble - 3 bo 0,001 0,011 0,011 0,004 Leica - 5 bo 0,001 0,015 0,015 0,015 Topcon - 5 bo 0,004 0,004 0,006 0,029 Trimble - 5 bo 0,001 0,012 0,012 0,024 Leica - 10 bo 0,001 0,001 0,001 0,029 Topcon - 15 bo 0,01 0,006 0,012 0,035 Trimble - 15 bo 0,006 0,028 0,029 0,034 Figur 24. Avvikelser för inmätning av detaljpunkt med 60 sek tidsintervall samt 3, 5 och 10/15 bakåtobjekt vid RUFRIS. 0,04 0,035 0,03 0,025 0,02 0,015 0,01 0,005 0 Inmätning av detaljpunkt med 180 sek tidsintervall Avvikelser (m) med 3 och 5 bakåtobjekt Northing (N) Easting (E) Radiell avvikelse Höjd Leica - 3 bo 0,001 0,012 0,012 0,005 Topcon - 3 bo 0,018 0,006 0,019 0,010 Trimble - 3 bo 0,001 0,011 0,011 0,004 Leica - 5 bo 0,009 0,014 0,017 0,008 Topcon - 5 bo 0,003 0,009 0,009 0,024 Trimble - 5 bo 0,014 0,033 0,036 0,028 Figur 25. Avvikelser för inmätning av detaljpunkt med 180 sek tidsintervall samt 3 och 5 bakåtobjekt vid RUFRIS. 29
40 5 Diskussion I kapitel 4 redovisades mätta resultat vid RUFRIS-etablering och inmätning av detaljpunkt med respektive fabrikat. På grund av mängden betydande parametrar som nämns i kapitel 2 blir varje etablering unik med varierande resultat. Däremot kan tydliga trender konstateras tillsammans med redovisad resultat. I detta kapitel diskuterasresultatet och jämförs med tidigare studier. 5.1 Stationsetablering - resultat i plan Vid stationsetablering visar användning av fler bakåtobjekt minskande avvikelse för samtliga instrument i plan. I northing visar Trimble den största avvikelsen på 34 mm och 26 mm i easting med 3 bakåtobjekt och 10 sekunder tidsintervall (figur 18). Den största radiella avvikelsen har Trimble på 43 mm med 3 bakåtobjekt (10 sek). Detta beror sannolikt p.g.a. avsaknaden av service och gammal programvara. Topcon gav överlag de minsta radiella avvikelserna i plan, med minsta avvikelsen på 9 mm med 15 bakåtobjekt (10 sek), se figur Stationsetablering - resultat i höjd I höjd visar Leica ingen avvikelse alls från sant värde vid stationsetablering med 3 bakåtobjekt, se figur 18. Detta beror på ett slumpmässigt fel, som kan kompenseras med överbestämningar. Ökad antal bakåtobjekt visar inte en enhetlig förbättring i höjd (figur 18, 19 och 20). För Topcon avvek resultatet markant från de andra instrumenten med 33 mm med 15 bakåtobjekt och 60 sekunder tidsintervall (figur 20). Detta beror på många olika parametrar såsom flervägsfel eller grova fel. Leica gav lika stora avvikelser i höjd på 4 mm vid 3 och 5 bakåtobjekt med 180 sek tidsintervall (figur 21). Detta har också slumpmässigt förekommit. 5.3 Detaljmätning resultat i plan Kapitel 5.1 presenterar Trimble största radiella avvikelsen och liknande resultat förkom vid inmätning av detaljpunkt. Detta visar att en god inmätning bygger på god stationsetablering. Trimble har en radiell avvikelse på 36 mm vid stationsetablering med 3 bakåtobjekt och 10 sekunder tidsintervall. Vid stationsetablering med 5 bakåtobjekt (10 sek) fick Trimble en minskande avvikelse till 12 mm (figur 22). Leica och Trimble presenterar en avvikelse på 12 mm och Topcon en på 9 mm vid 5 bakåtobjekt med 10 sek tidsintervall. Kontra 3 bakåtobjekt (10 sek) med ca 23 mm för Topcon och 37 mm för Trimble. De påvisar en tydlig förbättring vid detaljmätning med 5 bakåtobjekt kontra 3 bakåtobjekt. Leica bröt mot trenden med en minskad radiell avvikelse på 3 mm med 3 bakåtobjekt med 10 sekunder 30
41 tidsintervall (figur 22). Fler än 5 bakåtobjekt visar inte på någon markant minskning av avvikelser i plan. Dessutom visar ökad tidsintervall ingen korrelation med högre noggrannhetsbestämning vid inmätning av detaljpunkt i plan. Inmätning av detaljpunkt visar generellt mindre avvikelser än vad stationsetableringarna som mätningarna är utförda från, se exempelvis figur 18, 19, 22 och Detaljmätning - resultat i höjd I höjd gav ökande antalet bakåtobjekt ingen signifikant minskning av avvikelser. Relativt stora avvikelser skapades med 10/15 bakåtobjekt (10 sek) för samtliga instrument (figur 23). Få bakåtobjekt med ökad tidsintervall gav mindre avvikelser i höjd, se exempelvis figur 24 och 25. Stora avvikelser förekom i höjd vid inmätning av detaljpunkt med 60 sekunder tidsintervall. Medel på avvikelserna är ca 30 mm för Leica, 18 mm för Trimble och 26 mm för Topcon. 5.5 Jämförelse från tidigare studier Horemuz (2008) uppnår i sin studie en mätosäkerhet på 6 10 mm i plan och 3 5 mm i höjd vid stationsetablering med RUFRIS. Vilken är generellt bättre än vad som presenteras i denna studie. Detta beror på att bakåtobjekten inte skapades i en tillräckligt kontrollerad miljö. Det syns tydlig i höjd där avvikelser varierar från 2 30 mm. Dessutom gav 25 bakåtobjekt en stor spridning i höjd för samtliga fabrikat. Detta beror på oscillerade rörelser vid stationsetablering med bakåtobjekt skapade med N-RTK, samt påverkar flervägsfel resultatet. Åtgärder som kan vidtas är användningen av stativ istället för signalkäppar och stakkäppstöd. Fridén & Persson (2009) presenterar ett medelfel på 7 mm i plan och 11 mm i höjd vid stationsetablering med 10 bakåtobjekt och 10 sekunder tidsintervall. Vilket är mer jämförbart med Horemuz (2008) studie än föreliggande studie. Notera att denna studie är en jämförelsestudie av vad som kan förväntas av RUFRIS med olika fabrikat gentemot vissa parametrar. Jansson & Lundgren-Nilsson (2015) presenterar en mätosäkerhet på 12 mm i plan och 24 mm i höjd med RUFRIS (integrerad mätning). Vilken är klart större mätosäkerhet än vad de tidigare studier presenterar i föreliggande uppsats. I denna studie visar Trimble störst avvikelse i plan och höjd upp till 15 mm i plan och 30 mm i höjd, vilket är snarlikt resultatet som i Jansson & Lungren-Nilssons studie. I plan hade inmätning av detaljpunkt utförd mot Leica 360 -prisma mindre avvikelser än stationsetableringarna. 31
42 6 Slutsats I detta kapitel presenteras slutsatsen av denna studie. En sammanfattning av påvisad resultat som kan förväntas vid RUFRIS och eventuella felkällor. Generellt gav samtliga fabrikat snarlika resultat vid stationsetablering och inmätning av detaljpunkt, dock presenterar Trimble vissa avvikelser i höjd. Avvikelser överstiger inte 42 mm i plan och höjd för samtliga fabrikat vid stationsetablering. Topcon gav något betydligt större avvikelser i höjd jämfört med andra fabrikat, vad detta beror på är oklart (figur 20, 21 och 24). Topcon presenterar något divergerande tekniska specifikationer hos GNSS-mottagarna som kan bidra till detta, se tabell 2. Uppmärksamma Leicas begränsning av antalet bakåtobjekt med programvaran SmartWorx som nämns i kapitel 3.1. Annan programvaran måste införskaffas för användning av fler än tio bakåtobjekt. Trotts detta visar Leica avvikelser på endast några millimeter, jämfört med Trimble och Topcon 15 bakåtobjekt. Inmätning av detaljpunkt och stationsetablering förbättras signifikant i plan med fler bakåtobjekt och kort tidsintervall. Däremot förbättrar antalet bakåtobjekt inte positionsbestämning i höjd lika signifikant med RUFRIS. Längre tidsintervall med få bakåtobjekt ger en tydligt bättre positionsbestämning i höjd. Topcon presenterar minst avvikelser i plan och Leica minst i höjd. Generellt har inmätning av detaljpunkt mindre avvikelser i plan än stationsetablering, men något större avvikelser i höjd. Samtliga fabrikat och stationsetableringar uppnår HMK-standardnivå 3 för projektinriktad mätning och kartläggning vid detaljmätning. Där kravet är inom 50 mm i plan och höjd (HMK- Geodatakvalitet, 2016). Det rekommenderas att RUFRIS utförs med 5 bakåtobjekt i 10 sekunder. Detta för att uppnå god geometriska spridning av bakåtobjekt och samtidigt få god orientering hos totalstation. Färre bakåtobjekt gör det svårt att uppnå god geometrisk spridning på frihand i fält. Radiell spridning som beskrivs av Horemuz (2008) bör användas vid svårare miljöer. Vid högre noggrannhetskrav i höjd kan ökad tidsintervall användas för att uppnå en mer noggrann positionsbestämning. Vid mätning med hög noggrannhetskrav bör stativ användas vid stationsetablering, inte signalkäppar eller stakkäppstöd. 6.1 Resultat i plan Vid lägre precisionskrav rekommenderas att använda minst 5 bakåtpunkter för att uppnå en tillförlitlig stationsetablering och inmätning av detaljpunkt med RUFRIS. Mätosäkerhet som kan förväntas är ca 28 mm kontra 38 mm med 3 bakåtobjekt, 32
43 tillsammans med god geometrisk spridning. Förväntade mätosäkerhet i plan vid stationsetablering är ca 28 mm med Trimble, ca 23 mm med Leica och ca 14 mm med Topcon vid etablering med 5 bakåtobjekt. Vid inmätning av detaljpunkt kan en avvikelse på ca 25 mm förväntas i plan tillsammans 5 bakåtobjekt (10 sek) kontra ca 36 mm med 3 bakåtobjekt (10 sek). Trimble presenterar en avvikelse på ca 23 mm, Leica ca 20 mm och Topcon 8 cm med 5 bakåtobjekt. Ökad tidsintervall kan inte kompensera färre bakåtobjekt. Avvikelserna minskade marginellt med längre tidsintervall i plan. Vid positionsbestämning i plan ger fler bakåtobjekt mindre avvikelser. 6.2 Resultat i höjd Vid stationsetablering gav ökad tidsintervall med färre bakåtobjekt klart mindre avvikelser för samtliga instrument i höjd. En mätosäkerhet på 30 mm kan förväntas med 10 sekunder tidsintervall och 5 bakåtobjekt. Generellt minskar mätosäkerheten med ökad tidsintervall till ca 20 mm med 60 sekunder tidsintervall och under 10 mm med 180 sekunder med 5 bakåtobjekt. Topcon presenterar större avvikelser vid 180 sekunder tidsintervall än Leica och Trimble (figur 21). Vid inmätning av detaljpunkt visar dock Leica en avvikelse på 42 mm i höjd med 5 bakåtobjekt (10 sek) och 33 mm för Topcon. Med 180 sekunder tidintervall förminskas Leicas och Topcons avvikelser i höjd signifikant, med avvikelser på 8,3 mm respektive 24 mm. Vid mätning med låg precisionskrav kan en tidsintervall på 10 sekunder användas. Vid mer noggrann positionsbestämning i höjd bör 180 sekunder tidsintervall användas. 6.3 Felkällor Den störst felkällan som kan uppstå är grova fel, se radiella avvikelserna figur 20, 21, 24 och 25. Dessa kan motarbetas med överbestämningar och återbesök. I denna studie utfördes ett antal återbesök för att minimera några grova fel. Noggrannhet och nedlagd tid bör belysas ytterligare vid etablering med RUFRIS. Kontroll och uteslutning av dåligt mätta bakåtobjekt med N-RTK kan utföras i samtliga fältdatorer som testats i denna studie. Systematiska fel är också en felkälla som tydligt förkom i denna studie. Trimble ger generellt något större avvikande resultat. Detta trotts att enklare kalibrering har utförts med instrumentets programvara. Inlämning till serviceenhet för respektive fabrikat är att rekommendera, för att eliminera systematiska fel. 33
44 6.4 Framtida studier Framtida studier kan utforska hur spridning och avstånd av bakåtpunkter skapade i realtid påverkar stationsetablering med olika fabrikat vid RUFRIS. Hur Galileo påverkar RUFRIS i normala och svåra miljöer är intressant att utforska samt hur inmätning av bakåtobjekt i två cirkellägen påverkar RUFRIS. 34
45 Referenser Brown, N., Kaloustian, S., & Roeckle, M. (2007). Monitoring of Open Pit Mines. Receivers and Robotic Total Stations. Leica Geosystems. Från itoring_with_combined_gnss_and_robotic_total_stations.pdf Feng,Y., Gu, S., Shi,C., & Rizos,C. (2013). A reference station-based GNSS computing mode to supportunified precise point positioning and real-time kinematic services. Journal of Geodesy, 87, doi: /s Fridén, A., & Persson, A-K. (2009). Realtidsuppdaterad etablering av fri station ett fälttest med radiosänd projektanpassad N-RTK. (Exsamensarbete, Högskolan Väst). Horemuz, M. (2008). Realtidsuppdaterad fristation: Precisionsanalys. Stockholm: KTH. Från Horemuz, M. (2011). Realtidsuppdaterad fristation: Korrelationsanalys. Stockholm: KTH. Från Horemuz, M., & Anderson-Vium, J. (2011). Analysis of the precision in free station establishment by RTK GPS. Survey Review. 43(323), Doi: Horemuz, M., & Jansson, P. (2016). Optimum establishment of total station. Journal of Surveying Engineering.143(2). Doi: Lantmäteriet. (2008). Enhetligt Geodetiskt Referenssystem: Infoblad N:O 2 Systembeskrivningar. Hämtad , från ad/filer/kartor/geodesi_gps_och_detaljmatning/nytt_referenssytem/infoblad/inf o_blad-2.pdf Lantmäteriet. (2009). Enhetligt Geodetiskt Referenssystem: Infoblad N:O 3 Nytt höjdsystem. Hämtad , från Lantmäteriet. (2015). HMK-Geodatakvalitet 2015 (Lantmäteriet). Från 35
46 Lantmäteriet. (2015). HMK-Geodesi: Terrester detaljmätning 2015 (Lantmäteriet). Från Lantmäteriet. (2015). HMK-Geodesi: Stommätning 2015 (Lantmäteriet). Från Leica Geosystems. (2010). Leica Viva TS 15 Datablad. Hämtad , från Leica Geosystems. (2012). Leica Viva GNSS GS14 motagare Datablad. Hämtad , från Leica Geosystems. (2016). Leica Viva CS10 & CS15 Datablad. Hämtad , från Lundgren-Nilsson, L., & Jansson, P. (2015). Stomnätsstrategi - Inför en framtida kommunal stomnätsstrategi i plan. Från: Mårtensson, S-G., Reshetyuk, Y., Jivall, L. (2012). Measurement uncertainty in network RTK GNSS-based positioning of a terrestrial laser scanner. J. Appl. Geodesy, Vol. 6 (2012), pp Doi: /jag Ohlsson, K.(2014). Studie av mätosäkerhet och tidskorrelationer vid mätning med N-RTK i Swepos 35 km-nät.(examensarbete, KTH). Paziewski, J., & Wielgosz, P. (2016). Investigation of some selected strategies for multi-gnss instantaneous RTK positioning. Advances in Space Research, 59, Doi: SWEPOS-Lantmäteriet.(u.å). Handledning till SWEPOS Beräkningstjänst. Hämtad , från ing.aspx Trimble Navigation. (2015). Kontrollenhet Trimble TSC3. Hämtad , från SWE_TSC3System_DS_0413_LR.pdf 36
47 Trimble Navigation. (2015). Trimble S8 Total Station. Hämtad , från Trimble Navigation. (2015). Trimble R10 GNSS System. Hämtad , från Topcon Positioning. (2016). Topcon GT Series Robotic Total Station. Hämtad , från broch_7010_2214_revb_sm.pdf Topcon Positioning. (2016). Topcon FC-500 Ruggedized Field Controller. Hämtad , från 500_broch_7010_2155_revb_sm.pdf Topcon Positioning. (2017). Topcon HiPER SR Extended Range Site Receiver. Hämtad , från roch_7010_2108_revd_sm_3.pdf Vium-Andersson, J. (2011). Underlag till metodbeskrivning RUFRIS. Stockholm: WSP Samhällsbyggnad. Från stomnat/rufris---underlag-till-metodbeskrivning-rufris.pdf Yang, Y., Li, J., Xu, J., Tang, J., Gua, H., & He, H. (2011). Contribution of the Compass satellite navigation system to global PNT users. Chin. Sci. Bull. (2011) 56: doi: /s
48 Bilaga A Figur 1. Medelfel i plan för Leica, Trimble och Topcon i förhållande till antalet bakåtobjekt. Figur 2. Medelfel i plan för Leica, Trimble och Topcon i förhållande till tidsintervall. A1
49 Figur 3. Medelfel i höjd för Leica, Trimble och Topcon i förhållande till antalet bakåtobjekt Figur 4. Medelfel i höjd för Leica, Trimble och Topcon i förhållande till tidsintervall. A2



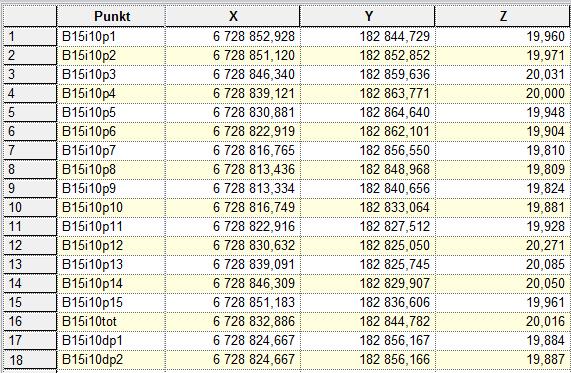
50 Bilaga B Samtliga mätningar utförda vid RUFRIS All data från Leica-mätningarna. Figur 1. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 3 & 5 bakåtobjekt i 10 sekunder tidsintervall. Figur 2. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 10 bakåtobjekt i 10 sekunder tidsintervall. Figur 3. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 13 bakåtobjekt i 60 sekunder tidsintervall. B1




51 Figur 4. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 5 bakåtobjekt i 60 sekunder tidsintervall. Figur 5. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 10 bakåtobjekt i 60 sekunder tidsintervall. Figur 6. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 3 bakåtobjekt i 180 sekunder tidsintervall. Figur 7. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 5 bakåtobjekt i 180 sekunder tidsintervall. B2


52 Alla data från Trimble-mätningarna Figur 8. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 3 bakåtobjekt i 10 sekunder tidsintervall. Figur 9. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 5 bakåtobjekt i 10 sekunder tidsintervall. Figur 10. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 15 bakåtobjekt i 10 sekunder tidsintervall. B3



53 Figur 11. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 25 bakåtobjekt i 10 sekunder tidsintervall. Figur 12. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 3 bakåtobjekt i 60 sekunder tidsintervall. Figur 13. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 5 bakåtobjekt i 60 sekunder tidsintervall. B4


54 Figur 14. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 15 bakåtobjekt i 60 sekunder tidsintervall. Figur 15. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 3 bakåtobjekt i 180 sekunder tidsintervall. Figur 16. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 5 bakåtobjekt i 180 sekunder tidsintervall. B5


55 All data från Topcon-mätningarna. Figur 17. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 3 bakåtobjekt i 10, 60 & 180 sekunder tidsintervall. Figur 18. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 5 bakåtobjekt i 10 sekunder tidsintervall. B6


56 Figur 19. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 15 bakåtobjekt i 10 sekunder tidsintervall. Figur 20. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 25 bakåtobjekt i 10 sekunder tidsintervall. B7


57 Figur 21. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 5 bakåtobjekt i 60 sekunder tidsintervall. Figur 22. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 15 bakåtobjekt i 60 sekunder tidsintervall. Figur 23. Koordinater för samtliga punkter vid RUFRIS-etablering och inmätning av detaljpunkt med 5 bakåtobjekt i 180 sekunder tidsintervall. B8
Metodbeskrivning RUFRIS
 Metodbeskrivning RUFRIS Dokumenttitel: Underlag till metodbeskrivning RUFRIS Skapat av: Johan Vium Andersson Dokumentdatum: 2012-03-16 Dokumenttyp: Rapport Publikationsnummer 2012:210 Version: 1,0 Publiceringsdatum:
Metodbeskrivning RUFRIS Dokumenttitel: Underlag till metodbeskrivning RUFRIS Skapat av: Johan Vium Andersson Dokumentdatum: 2012-03-16 Dokumenttyp: Rapport Publikationsnummer 2012:210 Version: 1,0 Publiceringsdatum:
Underlag till metodbeskrivning RUFRIS
 Uppdragsnr: 10141701 1 (7) PM Underlag till metodbeskrivning RUFRIS Upprättad av: Johan Vium Andersson, WSP Samhällsbyggnad 2011-11-09 WSP Samhällsbyggnad 121 88 Stockholm-Globen Besök: Arenavägen 7 Tel:
Uppdragsnr: 10141701 1 (7) PM Underlag till metodbeskrivning RUFRIS Upprättad av: Johan Vium Andersson, WSP Samhällsbyggnad 2011-11-09 WSP Samhällsbyggnad 121 88 Stockholm-Globen Besök: Arenavägen 7 Tel:
GPS del 2. Sadegh Jamali
 GPS del 2 Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 GPS-mätmetoder Absolut positionering (en
GPS del 2 Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 GPS-mätmetoder Absolut positionering (en
Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst
 Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst I denna checklista redovisas en del allmänna råd angående hur nätverks-rtk-tekniken bör användas för att uppnå ett tillfredställande
Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst I denna checklista redovisas en del allmänna råd angående hur nätverks-rtk-tekniken bör användas för att uppnå ett tillfredställande
GPS del 2. Sadegh Jamali. kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, och Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH)
; Lars Ollvik och Sven Agardh (LTH)") GPS del 2 Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, och Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Satellit positionering typer Absolut positionering (en
GPS del 2 Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, och Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Satellit positionering typer Absolut positionering (en
Realtidsuppdaterad fristation
 Realtidsuppdaterad fristation Tillförlitlighetsanalys Juni 2011 Milan Horemuz Kungliga Tekniska högskolan, Institution för Samhällsplanering och miljö Avdelningen för Geodesi Teknikringen 72, SE 100 44
Realtidsuppdaterad fristation Tillförlitlighetsanalys Juni 2011 Milan Horemuz Kungliga Tekniska högskolan, Institution för Samhällsplanering och miljö Avdelningen för Geodesi Teknikringen 72, SE 100 44
Bilaga 1: GPS-teknik, en liten ordlista
 Bilaga 1: GPS-teknik, en liten ordlista SATELLITSYSTEM GPS Global Positioning System. Amerikanskt satellitbaserat navigationssystem uppbyggt av USA:s försvarsmakt. Systemet är globalt täckande och används
Bilaga 1: GPS-teknik, en liten ordlista SATELLITSYSTEM GPS Global Positioning System. Amerikanskt satellitbaserat navigationssystem uppbyggt av USA:s försvarsmakt. Systemet är globalt täckande och används
Realtidsuppdaterad fristation
 Precisionsanalys Januari 2009 Milan Horemuz Kungliga Tekniska högskolan, Institution för transporter och samhällsekonomi Avdelningen för Geodesi Teknikringen 72, SE 100 44 Stockholm e-post: horemuz@kth.se
Precisionsanalys Januari 2009 Milan Horemuz Kungliga Tekniska högskolan, Institution för transporter och samhällsekonomi Avdelningen för Geodesi Teknikringen 72, SE 100 44 Stockholm e-post: horemuz@kth.se
Introduktion till GNSS
 Introduktion till GNSS Christina Lilje SWEPOS-seminariet 16 oktober 2007 Gävle Satellitsystem GNSS - Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering och positionsbestämning
Introduktion till GNSS Christina Lilje SWEPOS-seminariet 16 oktober 2007 Gävle Satellitsystem GNSS - Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering och positionsbestämning
Realtidsuppdaterad fristation
 Realtidsuppdaterad fristation Testmätningar BanaVäg i Väst April 2011 Milan Horemuz Kungliga Tekniska högskolan, Institution för Samhällsplanering och miljö Avdelningen för Geodesi och geoinformatik Teknikringen
Realtidsuppdaterad fristation Testmätningar BanaVäg i Väst April 2011 Milan Horemuz Kungliga Tekniska högskolan, Institution för Samhällsplanering och miljö Avdelningen för Geodesi och geoinformatik Teknikringen
EXAMENSARBETE. Val av mätinstrument. Eli Ellvall Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Val av mätinstrument Eli Ellvall 2015 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser ( Val av mätinstrument Eli Ellvall
EXAMENSARBETE Val av mätinstrument Eli Ellvall 2015 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser ( Val av mätinstrument Eli Ellvall
Utvärdering av olika metoder för stationsetablering med n-rtk
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Utvärdering av olika metoder för stationsetablering med n-rtk Vilhelm Svensson & Fredrik Tobler 2018 Examensarbete,
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Utvärdering av olika metoder för stationsetablering med n-rtk Vilhelm Svensson & Fredrik Tobler 2018 Examensarbete,
GNSS-mätning vid olika tidpunkter
 GNSS-mätning vid olika tidpunkter En studie om osäkerhet GNSS-measurements at different times A study of uncertainty Johan Törnvall Fakulteten för hälsa, natur- och teknikvetenskap Program: Mät- och kartteknikprogrammet
GNSS-mätning vid olika tidpunkter En studie om osäkerhet GNSS-measurements at different times A study of uncertainty Johan Törnvall Fakulteten för hälsa, natur- och teknikvetenskap Program: Mät- och kartteknikprogrammet
Global Positionering System (GPS)
") Global Positionering System (GPS) Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder
Global Positionering System (GPS) Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder
Utvärdering av olika metoder för stationsetablering
 Lantmäterirapport 2018:3 Rapportserie: Geodesi och Geografiska informationssystem Utvärdering av olika metoder för stationsetablering med nätverks-rtk Examensarbete av Vilhelm Svensson & Fredrik Tobler
Lantmäterirapport 2018:3 Rapportserie: Geodesi och Geografiska informationssystem Utvärdering av olika metoder för stationsetablering med nätverks-rtk Examensarbete av Vilhelm Svensson & Fredrik Tobler
RAPPORT. Höjdmätning med RUFRIS
 RAPPORT Höjdmätning med RUFRIS Trafikverket Postadress: Rödavägen 1, 781 89 Borlänge E-post: trafikverket@trafikverket.se Telefon: 0771-921 921 TMALL 0004 Rapport generell v 2.0 Dokumenttitel: Höjdmätning
RAPPORT Höjdmätning med RUFRIS Trafikverket Postadress: Rödavägen 1, 781 89 Borlänge E-post: trafikverket@trafikverket.se Telefon: 0771-921 921 TMALL 0004 Rapport generell v 2.0 Dokumenttitel: Höjdmätning
Global Positionering System (GPS)
") Global Positionering System (GPS) Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder i lantmäteri
Global Positionering System (GPS) Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder i lantmäteri
RUFRIS vs Trepunktsmetoden
 RUFRIS vs Trepunktsmetoden - en jämförelse vid etablering av nya utgångspunkter Sara Dannberg Maria Norrman Institutionen för ingenjörsvetenskap Lantmäteriingenjörsprogrammet EXC575 2014-06-04 Sammanfattning
RUFRIS vs Trepunktsmetoden - en jämförelse vid etablering av nya utgångspunkter Sara Dannberg Maria Norrman Institutionen för ingenjörsvetenskap Lantmäteriingenjörsprogrammet EXC575 2014-06-04 Sammanfattning
Vilka konsekvenser kan solstormar. Lund 21 maj 2012. Gunnar Hedling och Peter Wiklund gunnar.hedling@lm.se Ragne Emardsson och Per Jarlemark SP
 Vilka konsekvenser kan solstormar ha för GNSS-användningen? Seminariedag Solstormar I samhället Lund 21 maj 2012 Gunnar Hedling och Peter Wiklund gunnar.hedling@lm.se Ragne Emardsson och Per Jarlemark
Vilka konsekvenser kan solstormar ha för GNSS-användningen? Seminariedag Solstormar I samhället Lund 21 maj 2012 Gunnar Hedling och Peter Wiklund gunnar.hedling@lm.se Ragne Emardsson och Per Jarlemark
Hur används GNSS-tekniken idag och i framtiden. GIS-Samverkan Dalarna Falun 14 mars 2018 Kent Ohlsson
 Hur används GNSS-tekniken idag och i framtiden GIS-Samverkan Dalarna Falun 14 mars 2018 Kent Ohlsson Vad är GNSS? GNSS Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering
Hur används GNSS-tekniken idag och i framtiden GIS-Samverkan Dalarna Falun 14 mars 2018 Kent Ohlsson Vad är GNSS? GNSS Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering
GNSS-status och Galileoanvändning
 GNSS-status och Galileoanvändning vid nätverks-rtk Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Stefan Öberg Lantmäteriet, stefan.oberg@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
GNSS-status och Galileoanvändning vid nätverks-rtk Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Stefan Öberg Lantmäteriet, stefan.oberg@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
Inmätning av dold punkt
 Inmätning av dold punkt En jämförelse mellan mätmetoderna RUFRIS, dubbla avstånd och ortogonal inmätning Measuring of hidden points A comparison of the measure methods RUFRIS, Two distances and Backwards
Inmätning av dold punkt En jämförelse mellan mätmetoderna RUFRIS, dubbla avstånd och ortogonal inmätning Measuring of hidden points A comparison of the measure methods RUFRIS, Two distances and Backwards
Vad är god kvalitet vid mätning med GNSS/RTK?
 Vad är god kvalitet vid mätning med GNSS/RTK? MBK-dag, 4 november 2015 Lars Jämtnäs Enheten för geodetisk infrastruktur lars.jamtnas@lm.se Att bedöma kvalitet vid realtidsmätning Finns det något att jämföra
Vad är god kvalitet vid mätning med GNSS/RTK? MBK-dag, 4 november 2015 Lars Jämtnäs Enheten för geodetisk infrastruktur lars.jamtnas@lm.se Att bedöma kvalitet vid realtidsmätning Finns det något att jämföra
EXAMENSARBETE. Totalstation jämförd med mmgps. David Olsson. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Totalstation jämförd med mmgps David Olsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Totalstation jämförd med mmgps
EXAMENSARBETE Totalstation jämförd med mmgps David Olsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Totalstation jämförd med mmgps
SWEPOS status och utveckling
 SWEPOS status och utveckling MBK temadag Rankhyttan 2015-11-04 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se SWEPOS Nationellt nät av fasta referensstationer för GNSS som är en
SWEPOS status och utveckling MBK temadag Rankhyttan 2015-11-04 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se SWEPOS Nationellt nät av fasta referensstationer för GNSS som är en
Galileos påverkan på snabb statisk mätning vid korta baslinjer
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan på snabb statisk mätning vid korta baslinjer Per Eklund & Elias Olofsson 2018 Examensarbete,
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan på snabb statisk mätning vid korta baslinjer Per Eklund & Elias Olofsson 2018 Examensarbete,
Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik
 Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik I checklistan redovisas hur GNSS-tekniken bör användas vid klassisk statisk stomnätsmätning. Syftet
Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik I checklistan redovisas hur GNSS-tekniken bör användas vid klassisk statisk stomnätsmätning. Syftet
Trimtec.se - Auktoriserad Trimble dealer för hela Sverige
 Trimtec.se - Auktoriserad Trimble dealer för hela Sverige Auktoriserad Trimble återförsäljare Service Support Utbildning Uthyrning Försäljning Gatewing Vad vi kan erbjuda! Skanning Tillbehör Service Survey
Trimtec.se - Auktoriserad Trimble dealer för hela Sverige Auktoriserad Trimble återförsäljare Service Support Utbildning Uthyrning Försäljning Gatewing Vad vi kan erbjuda! Skanning Tillbehör Service Survey
Lantmäteriets testmätningar med RTK och Galileo i SWEPOS fram till januari 2017
 PM 2017-01-24 Lantmäteriets test med RTK och Galileo i SWEPOS fram till januari 2017 STEFAN ÖBERG, DAN NORIN, FREDRIK STEDT Sammanfattning SWEPOS Nätverks-RTK-tjänst har under många år använt kombinationen
PM 2017-01-24 Lantmäteriets test med RTK och Galileo i SWEPOS fram till januari 2017 STEFAN ÖBERG, DAN NORIN, FREDRIK STEDT Sammanfattning SWEPOS Nätverks-RTK-tjänst har under många år använt kombinationen
Forskning GNSS. Grundkonfigurationen av GPS består av 24 satelliter men idag cirkulerar närmare 30 satelliter runt jordklotet
 Forskning GNSS GNSS (Global Navigation Satellite Systems) är samlingsnamnet för globala satellitbaserade system för navigation, positionsbestämning och tidsöverföring. Det mest kända och använda systemet
Forskning GNSS GNSS (Global Navigation Satellite Systems) är samlingsnamnet för globala satellitbaserade system för navigation, positionsbestämning och tidsöverföring. Det mest kända och använda systemet
1 Tekniska förutsättningar; geodetiska referenssystem
 BILAGA 1 Bilaga till Rapporten Koordinatbestämda gränser, 2017-03-27, Dnr 508-2017/939 1 Tekniska förutsättningar; geodetiska referenssystem Grunden för den geodetiska infrastrukturen utgörs av referenssystemen,
BILAGA 1 Bilaga till Rapporten Koordinatbestämda gränser, 2017-03-27, Dnr 508-2017/939 1 Tekniska förutsättningar; geodetiska referenssystem Grunden för den geodetiska infrastrukturen utgörs av referenssystemen,
TEKNISKT PM STOMNÄT. Anslutningsnät i plan och höjd. Projektnamn: Väg 939 Gång- och cykelbana. Projektnummer: Uppdragsnr: (5)
") Uppdragsnr: 10209303 1 (5) TEKNISKT PM STOMNÄT Anslutningsnät i plan och höjd Projektnamn: Väg 939 Gång- och cykelbana Projektnummer: 10209303 WSP Samhällsbyggnad Laholmsvägen 10 30266 Halmstad Besök:
Uppdragsnr: 10209303 1 (5) TEKNISKT PM STOMNÄT Anslutningsnät i plan och höjd Projektnamn: Väg 939 Gång- och cykelbana Projektnummer: 10209303 WSP Samhällsbyggnad Laholmsvägen 10 30266 Halmstad Besök:
Framtida satellitsystem och signaler - fördelar och utmaningar
 Framtida satellitsystem och signaler - fördelar och utmaningar G P S Jan Johansson Rymd och geovetenskap med Onsala rymdobservatorium, Chalmers tekniska högskola & SP Sveriges tekniska forskningsinstitut
Framtida satellitsystem och signaler - fördelar och utmaningar G P S Jan Johansson Rymd och geovetenskap med Onsala rymdobservatorium, Chalmers tekniska högskola & SP Sveriges tekniska forskningsinstitut
HMK. Teknisk rapport 2018:1 Mät- och lägesosäkerhet vid geodatainsamling en lathund. Clas-Göran Persson. handbok i mät- och kartfrågor
 HMK handbok i mät- och kartfrågor handbok i mät- och kartfrågor Mät- och lägesosäkerhet vid geodatainsamling en lathund Clas-Göran Persson Författarens kontaktuppgifter Clas-Göran Persson Skansstigen 3
HMK handbok i mät- och kartfrågor handbok i mät- och kartfrågor Mät- och lägesosäkerhet vid geodatainsamling en lathund Clas-Göran Persson Författarens kontaktuppgifter Clas-Göran Persson Skansstigen 3
Att mäta med kvalitet. Nya avtal för digital registerkarta Lycksele, Kent Ohlsson
 Att mäta med kvalitet Nya avtal för digital registerkarta Lycksele, 2018-04-18 Kent Ohlsson I det här passet går vi igenom följande: Begreppen kvalitet och god mätsed HMK Handbok i mät- och kartfrågor
Att mäta med kvalitet Nya avtal för digital registerkarta Lycksele, 2018-04-18 Kent Ohlsson I det här passet går vi igenom följande: Begreppen kvalitet och god mätsed HMK Handbok i mät- och kartfrågor
Metoder för att etablera fri station
 Metoder för att etablera fri station En jämförelsestudie av GNSS-etableringar och traditionell etablering Methods to establish free station A comparison study of GNSS-establishment and traditional establishment
Metoder för att etablera fri station En jämförelsestudie av GNSS-etableringar och traditionell etablering Methods to establish free station A comparison study of GNSS-establishment and traditional establishment
Jämförelse av höjdmätning med olika GNSS-mottagare i SWEPOS nätverks-rtk-tjänst
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Jämförelse av höjdmätning med olika GNSS-mottagare i SWEPOS nätverks-rtk-tjänst Annika Fredriksson & Madeleine
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Jämförelse av höjdmätning med olika GNSS-mottagare i SWEPOS nätverks-rtk-tjänst Annika Fredriksson & Madeleine
Användarmanual för RUFRIS i GeoPad
 Användarmanual RUFRIS Användarmanual för RUFRIS i GeoPad RUFRIS i GeoPad All rights reserved. No parts of this work may be reproduced in any form or by any means - graphic, electronic, or mechanical, including
Användarmanual RUFRIS Användarmanual för RUFRIS i GeoPad RUFRIS i GeoPad All rights reserved. No parts of this work may be reproduced in any form or by any means - graphic, electronic, or mechanical, including
SWEPOS. Studiebesök från SAMGIS Västernorrland Peter Wiklund Lantmäteriet, Geodetisk infrastruktur
 SWEPOS Studiebesök från SAMGIS Västernorrland 2016-02-24 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se Geodetisk infrastruktur Vår vision är att tillgodose samhällets behov av
SWEPOS Studiebesök från SAMGIS Västernorrland 2016-02-24 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se Geodetisk infrastruktur Vår vision är att tillgodose samhällets behov av
Jämförelse av olika GNSS-mottagare
 Jämförelse av olika GNSS-mottagare Mätnoggrannhet i plan och höjd vid användande av nätverks-rtk Comparing GNSS Receivers Horizontal and Vertical Accuracy using Network RTK Andreas Larsson och Patrik Söder
Jämförelse av olika GNSS-mottagare Mätnoggrannhet i plan och höjd vid användande av nätverks-rtk Comparing GNSS Receivers Horizontal and Vertical Accuracy using Network RTK Andreas Larsson och Patrik Söder
Realtidsmätning inom fastighetsbildning med Precise Point Positioning (PPP) Victor Kvarnström & Jessica Wallerström 2016-06-04
 Victor Kvarnström & Jessica Wallerström 2016-06-04") Realtidsmätning inom fastighetsbildning med Precise Point Positioning (PPP) Victor Kvarnström & Jessica Wallerström 2016-06-04 Examensarbete, 15 hp Lantmäteriteknik Lantmäteriingenjörsprogrammet, Högskolan
Realtidsmätning inom fastighetsbildning med Precise Point Positioning (PPP) Victor Kvarnström & Jessica Wallerström 2016-06-04 Examensarbete, 15 hp Lantmäteriteknik Lantmäteriingenjörsprogrammet, Högskolan
Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl januari, 2017.
 FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 10 januari, 2017. Denna tentamen
FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 10 januari, 2017. Denna tentamen
Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning
 Fakulteten för humaniora och samhällsvetenskap Naturgeografi Magnus Wallsten Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning Comparison
Fakulteten för humaniora och samhällsvetenskap Naturgeografi Magnus Wallsten Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning Comparison
Galileos påverkan vid Nätverks-RTK satellitpositionering i svåra miljöer
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan vid Nätverks-RTK satellitpositionering i svåra miljöer Stefan Johansson & Petter Tysk 2017
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan vid Nätverks-RTK satellitpositionering i svåra miljöer Stefan Johansson & Petter Tysk 2017
Integration av geodetiska observationer i beräkningstjänsten
 Uppdragsnr: 10141701 1 (12) PM Integration av geodetiska observationer i beräkningstjänsten Upprättad av: Johan Vium Andersson, WSP Samhällsbyggnad Lars Jämtnäs, Lantmäteriet 2011-11-17 WSP Samhällsbyggnad
Uppdragsnr: 10141701 1 (12) PM Integration av geodetiska observationer i beräkningstjänsten Upprättad av: Johan Vium Andersson, WSP Samhällsbyggnad Lars Jämtnäs, Lantmäteriet 2011-11-17 WSP Samhällsbyggnad
Framställning av en digital höjdmodell över Storsjö strand i Östersund
 Framställning av en digital höjdmodell över Storsjö strand i Östersund Martin Elofsson och Fredrik Öberg 2011 Examensarbete, högskolenivå, 7,5 hp Geomatik Geomatikprogrammet Handledare: Stig-Göran Mårtensson
Framställning av en digital höjdmodell över Storsjö strand i Östersund Martin Elofsson och Fredrik Öberg 2011 Examensarbete, högskolenivå, 7,5 hp Geomatik Geomatikprogrammet Handledare: Stig-Göran Mårtensson
Morgondagens geodetiska infrastruktur i Sverige
 Morgondagens geodetiska infrastruktur i Sverige Lars E. Engberg Lantmäteriet lars.engberg@lm.se Geodesi 2010 Vision är att tillgodose samhällets behov av en enhetlig, hållbar geodetisk infrastruktur samt
Morgondagens geodetiska infrastruktur i Sverige Lars E. Engberg Lantmäteriet lars.engberg@lm.se Geodesi 2010 Vision är att tillgodose samhällets behov av en enhetlig, hållbar geodetisk infrastruktur samt
Studie av mätosäkerhet och tidskorrelationer vid mätning med. SWEPOS 35 km-nät
 Lantmäterirapport 2014:5 Rapportserie: Geodesi och Geografiska informationssystem Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i SWEPOS 35 km-nät Examensarbete av Kent Ohlsson
Lantmäterirapport 2014:5 Rapportserie: Geodesi och Geografiska informationssystem Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i SWEPOS 35 km-nät Examensarbete av Kent Ohlsson
Nysatsningen på KTH och aktuell forskning i Tillämpad geodesi
 Nysatsningen på KTH och aktuell forskning i Tillämpad geodesi Patric Jansson Avdelningschef och forskare Avdelningen för geodesi och geoinformatik KTH Geoinfo Uppsala, 3 oktober 2012 1 Två initiativ till
Nysatsningen på KTH och aktuell forskning i Tillämpad geodesi Patric Jansson Avdelningschef och forskare Avdelningen för geodesi och geoinformatik KTH Geoinfo Uppsala, 3 oktober 2012 1 Två initiativ till
HJÄLPGUIDE. Hur man gör en kalibrering. Innehållsförteckning. Kontaktuppgifter KALIBRERING AV TOTALSTATION
 HJÄLPGUIDE Innehållsförteckning KALIBRERING AV TOTALSTATION 1 Allmänna tips samt information om kalibrering 2 Skapa ett jobb där samtliga kalibreringar landar 3 Nivellering 4-5 Kompensatorkalibrering 6-11
HJÄLPGUIDE Innehållsförteckning KALIBRERING AV TOTALSTATION 1 Allmänna tips samt information om kalibrering 2 Skapa ett jobb där samtliga kalibreringar landar 3 Nivellering 4-5 Kompensatorkalibrering 6-11
En osäkerhetsundersökning av GNSS-mottagare
 En osäkerhetsundersökning av GNSS-mottagare An investigation of GNSS receiver uncertainty Jonas Törnqvist Fakultet: Fakulteten för hälsa, natur och teknikvetenskap Program: Mät- och kartteknikprogrammet
En osäkerhetsundersökning av GNSS-mottagare An investigation of GNSS receiver uncertainty Jonas Törnqvist Fakultet: Fakulteten för hälsa, natur och teknikvetenskap Program: Mät- och kartteknikprogrammet
Undersökning av mätosäkerheten i det förtätade SWEPOS-nätet i Stockholmsområdet
 LMV-Rapport 2011:2 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av mätosäkerheten i det förtätade SWEPOS-nätet i Stockholmsområdet vid mätning med nätverks-rtk Examensarbete av
LMV-Rapport 2011:2 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av mätosäkerheten i det förtätade SWEPOS-nätet i Stockholmsområdet vid mätning med nätverks-rtk Examensarbete av
Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl januari, 2015.
 FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 12 januari, 2015. Denna tentamen
FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 12 januari, 2015. Denna tentamen
Krav avseende beräkning och redovisning i beräkningstjänsten utifrån SIS-TS och BVS. 1 Sammanfattning
 Uppdragsnr: 10141701 1 (10) PM Krav avseende beräkning och redovisning i beräkningstjänsten utifrån SIS-TS och BVS 1 Sammanfattning Detta PM är en del i Trafikverkets forsknings- och innovationsprojekt
Uppdragsnr: 10141701 1 (10) PM Krav avseende beräkning och redovisning i beräkningstjänsten utifrån SIS-TS och BVS 1 Sammanfattning Detta PM är en del i Trafikverkets forsknings- och innovationsprojekt
Höjdbestämningsmetoder vid upprättande av nybyggnadskartor
 Höjdbestämningsmetoder vid upprättande av nybyggnadskartor Jämförelse mellan nätverks-rtk och trigonometrisk höjdmätning Height determination methods in establishment of new construction maps Comparison
Höjdbestämningsmetoder vid upprättande av nybyggnadskartor Jämförelse mellan nätverks-rtk och trigonometrisk höjdmätning Height determination methods in establishment of new construction maps Comparison
Leica SmartStation Total station med integrerad GPS
 Leica SmartStation Total station med integrerad GPS Leica SmartStation Totalstation med integrerad GPS Nytt revolutionerande mätsystem. Världens första perfekt kombinerade TPS och GPS. Totalstation med
Leica SmartStation Total station med integrerad GPS Leica SmartStation Totalstation med integrerad GPS Nytt revolutionerande mätsystem. Världens första perfekt kombinerade TPS och GPS. Totalstation med
Fakulteten för humaniora och samhällsvetenskap. Naturgeografi. Caroline Carlsson och Matilda Tidholm. Maskinstyrning.
 Fakulteten för humaniora och samhällsvetenskap Naturgeografi Caroline Carlsson och Matilda Tidholm Maskinstyrning Maskinstyrning och dess användning ur ett geodetiskt perspektiv. Machine control Machine
Fakulteten för humaniora och samhällsvetenskap Naturgeografi Caroline Carlsson och Matilda Tidholm Maskinstyrning Maskinstyrning och dess användning ur ett geodetiskt perspektiv. Machine control Machine
Undersökning av mätosäkerheten i det förtätade SWEPOS -nätet i Stockholmsområdet
 Undersökning av mätosäkerheten i det förtätade SWEPOS -nätet i Stockholmsområdet vid mätning med nätverks-rtk Jakob Jansson 2011 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik Lantmätarprogrammet
Undersökning av mätosäkerheten i det förtätade SWEPOS -nätet i Stockholmsområdet vid mätning med nätverks-rtk Jakob Jansson 2011 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik Lantmätarprogrammet
HMK SyostGIS
 HMK 2014 SyostGIS 2014-11-11 C Bakgrund HMK HMK Handbok till Mätningskungörelsen gavs ut 1993-1995 Teknikbeskrivningar samt stöd för kvalitetskontroll och upphandling av mättjänster 9 delar HMK-Geodesi,
HMK 2014 SyostGIS 2014-11-11 C Bakgrund HMK HMK Handbok till Mätningskungörelsen gavs ut 1993-1995 Teknikbeskrivningar samt stöd för kvalitetskontroll och upphandling av mättjänster 9 delar HMK-Geodesi,
Den nya Nordiska landhöjningsmodellen
 Den nya Nordiska landhöjningsmodellen NKG2016LU Jonas Ågren Geodesienheten Lantmäteriet Jonas Ågren, MätKart17, Örebro, februari 2017 Introduktion I allt arbete med geodetiska referenssystem i Sverige
Den nya Nordiska landhöjningsmodellen NKG2016LU Jonas Ågren Geodesienheten Lantmäteriet Jonas Ågren, MätKart17, Örebro, februari 2017 Introduktion I allt arbete med geodetiska referenssystem i Sverige
Leica ScanStation 2 En ny nivå för laserscanners ökad scanhastighet och mångsidighet
 Leica ScanStation 2 En ny nivå för laserscanners ökad scanhastighet och mångsidighet Med en förbättrad scanhastighet på upp till 10 gånger snabbare och friheten som totalstationsegenskaperna ger, lyfter
Leica ScanStation 2 En ny nivå för laserscanners ökad scanhastighet och mångsidighet Med en förbättrad scanhastighet på upp till 10 gånger snabbare och friheten som totalstationsegenskaperna ger, lyfter
Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl januari, 2017.
 FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 10 januari, 2017. Denna tentamen
FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 10 januari, 2017. Denna tentamen
Fakulteten för humaniora och samhällsvetenskap. Naturgeografi. Robin Karlsson. Mätning i Strandvik. Measuring in Strandvik
 Fakulteten för humaniora och samhällsvetenskap Naturgeografi Robin Karlsson Mätning i Strandvik Inmätning och kartering av Strandviks småbåtshamn Measuring in Strandvik Measuring and mapping of the Strandvik
Fakulteten för humaniora och samhällsvetenskap Naturgeografi Robin Karlsson Mätning i Strandvik Inmätning och kartering av Strandviks småbåtshamn Measuring in Strandvik Measuring and mapping of the Strandvik
4/29/2011. Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl maj, 2011.
 FÖRSÄTTSBLAD 4/29/2011 Institutionen för Geo- och Ekosystemvetenskaper Institutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 2 maj, 2011. Besvara frågor till
FÖRSÄTTSBLAD 4/29/2011 Institutionen för Geo- och Ekosystemvetenskaper Institutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 2 maj, 2011. Besvara frågor till
Geodetisk infrastruktur för projekt i Göteborgsområdet
 Geodetisk infrastruktur för projekt i Göteborgsområdet Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Dan Norin Lantmäteriet, dan.norin@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
Geodetisk infrastruktur för projekt i Göteborgsområdet Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Dan Norin Lantmäteriet, dan.norin@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
Koordinatsystem och transformationer. Tina Kempe Lantmäteriet Informationsförsörjning geodesi tel. 026-63 38 56 christina.kempe@lm.
 Koordinatsystem och transformationer Tina Kempe Lantmäteriet Informationsförsörjning geodesi tel. 026-63 38 56 christina.kempe@lm.se Geodesi Vetenskapen om jordytans uppmätning och kartläggning (Helmert
Koordinatsystem och transformationer Tina Kempe Lantmäteriet Informationsförsörjning geodesi tel. 026-63 38 56 christina.kempe@lm.se Geodesi Vetenskapen om jordytans uppmätning och kartläggning (Helmert
HMK - handbok i mät- och kartfrågor HMK. Anders Grönlund Lantmäteriet. Introduktion HMK
 HMK - handbok i mät- och kartfrågor HMK Anders Grönlund Lantmäteriet Introduktion HMK C Bakgrund HMK HMK Handbok till Mätningskungörelsen gavs ut 1993-1995 Teknikbeskrivningar samt stöd för kvalitetskontroll
HMK - handbok i mät- och kartfrågor HMK Anders Grönlund Lantmäteriet Introduktion HMK C Bakgrund HMK HMK Handbok till Mätningskungörelsen gavs ut 1993-1995 Teknikbeskrivningar samt stöd för kvalitetskontroll
MätKart 12 Luleå. Positionering och GPS utrustningar ProLocate KartSmart. Aris Kolovos
 MätKart 12 Luleå Positionering och GPS utrustningar ProLocate KartSmart Aris Kolovos Redan de gamla greker tog hjälp av solen på dagen och stjärnorna på natten för att navigera. Navigation Idag tar vi
MätKart 12 Luleå Positionering och GPS utrustningar ProLocate KartSmart Aris Kolovos Redan de gamla greker tog hjälp av solen på dagen och stjärnorna på natten för att navigera. Navigation Idag tar vi
Höjdmätning med GNSS vägledning för olika mätsituationer
 LMV-Rapport 2010: 4 Rapportserie: Geodesi och Geografiska informationssystem Höjdmätning med GNSS vägledning för olika mätsituationer Sammanställd av Per-Ola Eriksson Gävle 2010 L A N T M Ä T E R I E T
LMV-Rapport 2010: 4 Rapportserie: Geodesi och Geografiska informationssystem Höjdmätning med GNSS vägledning för olika mätsituationer Sammanställd av Per-Ola Eriksson Gävle 2010 L A N T M Ä T E R I E T
Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl december, 2013.
 FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 20 december, 2013. Denna tentamen
FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 20 december, 2013. Denna tentamen
Förord. Gävle, februari 2009
 LMV -Rapport 009: Rapportserie: Geodesi och Geografiska informationssystem D etaljmä tning med nä tverks-rtk en noggrannhetsundersökning Exam ensarbete av Robert O dolinski & Johan Sunna G ävle 009 L A
LMV -Rapport 009: Rapportserie: Geodesi och Geografiska informationssystem D etaljmä tning med nä tverks-rtk en noggrannhetsundersökning Exam ensarbete av Robert O dolinski & Johan Sunna G ävle 009 L A
RAPPORT. Kompletterande studier kring detaljmätning vid datafångst i tidiga projektskeden
 RAPPORT Kompletterande studier kring detaljmätning vid datafångst i tidiga projektskeden Dokumenttitel: Kompletterande studier kring detaljmätning vid datafångst i tidiga projektskeden Skapat av: Johan
RAPPORT Kompletterande studier kring detaljmätning vid datafångst i tidiga projektskeden Dokumenttitel: Kompletterande studier kring detaljmätning vid datafångst i tidiga projektskeden Skapat av: Johan
Samhällsmätning i förändring
 Samhällsmätning i förändring Förord I kommunerna finns en omfattande mätningsteknisk verksamhet. Denna tillgodoser samhällets behov av detaljerade kartor och annan geografisk information geodata. Informationen
Samhällsmätning i förändring Förord I kommunerna finns en omfattande mätningsteknisk verksamhet. Denna tillgodoser samhällets behov av detaljerade kartor och annan geografisk information geodata. Informationen
TPS700 Automated Series Ökad mätningsprestanda och bekvämlighet. PinPoint Technology
 TPS700 Automated Series Ökad mätningsprestanda och bekvämlighet PinPoint Technology Leica TPS700 Automated Series med automatik för högre komfort Hanterar du varierande mätuppdrag varje dag? Söker du enklare
TPS700 Automated Series Ökad mätningsprestanda och bekvämlighet PinPoint Technology Leica TPS700 Automated Series med automatik för högre komfort Hanterar du varierande mätuppdrag varje dag? Söker du enklare
Förtätning av nätverks-rtk i nordvästra Skåne
 STADSBYGGNADSFÖRVALTNINGEN STADSMILJÖ KART OCH MÄT Förtätning av nätverks-rtk i nordvästra Skåne 2017-11-10 Sida 1 Swepos nätverks-rtk referensstationer Nationellt nät av fasta referensstationer för GNSS
STADSBYGGNADSFÖRVALTNINGEN STADSMILJÖ KART OCH MÄT Förtätning av nätverks-rtk i nordvästra Skåne 2017-11-10 Sida 1 Swepos nätverks-rtk referensstationer Nationellt nät av fasta referensstationer för GNSS
Nästa skottsekund (leap second) kommer att läggas till vid midnatt mellan den. 31 december 2016 och 1 januari :59:59 23:59:60 00:00:00
 kommer att läggas till vid midnatt mellan den. 31 december 2016 och 1 januari :59:59 23:59:60 00:00:00") Nästa skottsekund (leap second) kommer att läggas till vid midnatt mellan den 31 december 2016 och 1 januari 2017. 23:59:59 23:59:60 00:00:00 Här följer instruktioner för att hantera denna händelse. Vad
Nästa skottsekund (leap second) kommer att läggas till vid midnatt mellan den 31 december 2016 och 1 januari 2017. 23:59:59 23:59:60 00:00:00 Här följer instruktioner för att hantera denna händelse. Vad
Leica FlexLine TS09plus Full Precision med Hög funktionalitet
 Leica FlexLine TS09plus Full Precision med Hög funktionalitet Det första pluset: Leica Geosystems original-kvalitet För många är kvalitet något relativt. Så är det inte för Leica Geosystems. För att säkerställa
Leica FlexLine TS09plus Full Precision med Hög funktionalitet Det första pluset: Leica Geosystems original-kvalitet För många är kvalitet något relativt. Så är det inte för Leica Geosystems. För att säkerställa
MÄT-R MÄTNINGSTEKNISK REDOVISNING
 Uppdragsnr: 10209303 1 (7) MÄT-R MÄTNINGSTEKNISK REDOVISNING Projektnamn: Väg 939 Projektnummer: 10209303 WSP Samhällsbyggnad Laholmsvägen 10 302 66 Halmstad Besök: Laholmsvägen 10 Tel: +46 10 722 50 00
Uppdragsnr: 10209303 1 (7) MÄT-R MÄTNINGSTEKNISK REDOVISNING Projektnamn: Väg 939 Projektnummer: 10209303 WSP Samhällsbyggnad Laholmsvägen 10 302 66 Halmstad Besök: Laholmsvägen 10 Tel: +46 10 722 50 00
Undersökning av nätverks-rtk-meddelande tillsammans med olika GNSS-mottagare
 Undersökning av nätverks-rtk-meddelande tillsammans med olika GNSS-mottagare vid nätverks-rtk-mätning i SWEPOS -nät av fasta referensstationer Rebecka Lundell 2012 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik
Undersökning av nätverks-rtk-meddelande tillsammans med olika GNSS-mottagare vid nätverks-rtk-mätning i SWEPOS -nät av fasta referensstationer Rebecka Lundell 2012 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik
Fördröjning och bortfall av nätverkskorrektioner
 Fördröjning och bortfall av nätverkskorrektioner osäkerhetskällor för nätverks-rtk? Lena Morén och Matilda Stenbacka 2013 Examensarbete, Grundnivå (kandidatexamen), 15 hp Lantmäteriteknik Lantmätarprogrammet.
Fördröjning och bortfall av nätverkskorrektioner osäkerhetskällor för nätverks-rtk? Lena Morén och Matilda Stenbacka 2013 Examensarbete, Grundnivå (kandidatexamen), 15 hp Lantmäteriteknik Lantmätarprogrammet.
Förord. Gävle, april 2007
 LMV -Rapport 27:1 Rapportserie: Geodesi och Geografiska informationssystem En nä tverks-rtk - jä mfö relse mellan GP S och GP S/GLO N A SS Exam ensarbete av Fredrik Johnsson och Mattias W allerström G
LMV -Rapport 27:1 Rapportserie: Geodesi och Geografiska informationssystem En nä tverks-rtk - jä mfö relse mellan GP S och GP S/GLO N A SS Exam ensarbete av Fredrik Johnsson och Mattias W allerström G
Teknisk handbok. Relationshandlingar. Allmänna krav på relationshanlingar
 Teknisk handbok Relationshandlingar Allmänna krav på relationshanlingar Innehåll 1 Allmänna krav på relationshandlingar 2 1.1 Sammanfattning 2 1.2 Allmänt 2 1.3 Inmätning 2 1.4 Leverans av CAD-filer 2
Teknisk handbok Relationshandlingar Allmänna krav på relationshanlingar Innehåll 1 Allmänna krav på relationshandlingar 2 1.1 Sammanfattning 2 1.2 Allmänt 2 1.3 Inmätning 2 1.4 Leverans av CAD-filer 2
MÄTNINGAR INFÖR BYTE AV REFERENSSYSTEM I PLAN I OCKELBO KOMMUN
 INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ MÄTNINGAR INFÖR BYTE AV REFERENSSYSTEM I PLAN I OCKELBO KOMMUN Johanna Eriksson och Isak Svärd Juni 2009 Examensarbete 15 hp B-nivå Geomatik Geomatikprogrammet
INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ MÄTNINGAR INFÖR BYTE AV REFERENSSYSTEM I PLAN I OCKELBO KOMMUN Johanna Eriksson och Isak Svärd Juni 2009 Examensarbete 15 hp B-nivå Geomatik Geomatikprogrammet
Grundläggande teori om GNSS
 Grundläggande teori om GNSS Termen satellitmätning refererar till alla metoder som använder satelliter som referenspunkter för positionsbestämning. Idag (2010) finns det två fungerande satellitbaserade
Grundläggande teori om GNSS Termen satellitmätning refererar till alla metoder som använder satelliter som referenspunkter för positionsbestämning. Idag (2010) finns det två fungerande satellitbaserade
Värmlands kommuner byter referenssystem till SWEREF 99. Förenklad användning av lägesbunden information
 Värmlands kommuner byter referenssystem till SWEREF 99 Förenklad användning av lägesbunden information Ett enhetligt referenssystem förenklar användningen av lägesbunden information. Det säkrar även utbytbarheten
Värmlands kommuner byter referenssystem till SWEREF 99 Förenklad användning av lägesbunden information Ett enhetligt referenssystem förenklar användningen av lägesbunden information. Det säkrar även utbytbarheten
En noggrannhetsjämförelse. Nätverks-RTK och Nätverks-DGPS
 LMV-Rapport 25:3 Rapportserie: Geodesi och Geografiska informationssystem En noggrannhetsjämförelse mellan Nätverks-RTK och Nätverks-DGPS Magnus Ahrenberg & Andreas Olofsson Examensarbete Gävle 25 L A
LMV-Rapport 25:3 Rapportserie: Geodesi och Geografiska informationssystem En noggrannhetsjämförelse mellan Nätverks-RTK och Nätverks-DGPS Magnus Ahrenberg & Andreas Olofsson Examensarbete Gävle 25 L A
Undersökning av. tillsammans med olika GNSSmottagare
 Lantmäterirapport 2012:3 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av nätverks-rtkmeddelande tillsammans med olika GNSSmottagare vid nätverks-rtk-mätning i SWEPOS nät av fasta
Lantmäterirapport 2012:3 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av nätverks-rtkmeddelande tillsammans med olika GNSSmottagare vid nätverks-rtk-mätning i SWEPOS nät av fasta
Artikel publicerad i Sveriges Kart- & Mätningstekniska Förenings (SKMF:s) tidskrift Sinus, nr , sid 12-13
 tidskrift Sinus, nr , sid 12-13") 2018-03-09 PM Artikel publicerad i Sveriges Kart- & Mätningstekniska Förenings (SKMF:s) tidskrift Sinus, nr 1 2018, sid 12-13 Om SWEN17_RH2000 den nya nationella geoidmodellen TINA KEMPE & JONAS ÅGREN
2018-03-09 PM Artikel publicerad i Sveriges Kart- & Mätningstekniska Förenings (SKMF:s) tidskrift Sinus, nr 1 2018, sid 12-13 Om SWEN17_RH2000 den nya nationella geoidmodellen TINA KEMPE & JONAS ÅGREN
Teknisk specifikation SIS/TS 21143:2004. Byggmätning Geodetisk mätning, beräkning och redovisning vid långsträckta objekt
 Teknisk specifikation Utgåva 1 November 2004 Byggmätning Geodetisk mätning, beräkning och redovisning vid långsträckta objekt Engineering survey for construction works Surveying and mapping for long range
Teknisk specifikation Utgåva 1 November 2004 Byggmätning Geodetisk mätning, beräkning och redovisning vid långsträckta objekt Engineering survey for construction works Surveying and mapping for long range
Lägesosäkerhet vid mätning av dold punkt med totalstation och GNSS
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Lägesosäkerhet vid mätning av dold punkt med totalstation och GNSS Patrik Persson och Dennis Sjölén 2018 Examensarbete,
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Lägesosäkerhet vid mätning av dold punkt med totalstation och GNSS Patrik Persson och Dennis Sjölén 2018 Examensarbete,
Konfigurering av nätverksanslutning i TSC2
 Konfigurering av nätverksanslutning i TSC2 För att kunna få tillgång till korrektioner från SWEPOS via GPRS behöver du en nätverksanslutning. Denna gör du genom att trycka på Windows symbolen uppe till
Konfigurering av nätverksanslutning i TSC2 För att kunna få tillgång till korrektioner från SWEPOS via GPRS behöver du en nätverksanslutning. Denna gör du genom att trycka på Windows symbolen uppe till
P-08-46. Platsundersökning Forsmark. Upprättande av riksnätsanslutet stomnät i plan och höjd för Forsmarks undersökningsområde
 P-08-46 Platsundersökning Forsmark Upprättande av riksnätsanslutet stomnät i plan och höjd för Forsmarks undersökningsområde Per-Åke Jureskog Geocon AB September 2002 Reviderad av Ulf Brising Sweco Position
P-08-46 Platsundersökning Forsmark Upprättande av riksnätsanslutet stomnät i plan och höjd för Forsmarks undersökningsområde Per-Åke Jureskog Geocon AB September 2002 Reviderad av Ulf Brising Sweco Position
Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl januari, 2018.
 FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 9 januari, 2018. Denna tentamen
FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 9 januari, 2018. Denna tentamen
Sverige byter referenssystem
 Kommunerna har en nyckelroll Sverige byter referenssystem Förenklad användning av lägesbunden information FOTO: Björn Hårdstedt Ett enhetligt referenssystem förenklar användningen av lägesbunden information.
Kommunerna har en nyckelroll Sverige byter referenssystem Förenklad användning av lägesbunden information FOTO: Björn Hårdstedt Ett enhetligt referenssystem förenklar användningen av lägesbunden information.
Galileos utveckling till att bli en del av praktisk GNSSanvändning
 2018-03-09 PM Artikel publicerad i Sveriges Kart- & Mätningstekniska Förenings (SKMF:s) tidskrift Sinus, nr 1 2018, sid 26 28 Galileos utveckling till att bli en del av praktisk GNSSanvändning DAN NORIN
2018-03-09 PM Artikel publicerad i Sveriges Kart- & Mätningstekniska Förenings (SKMF:s) tidskrift Sinus, nr 1 2018, sid 26 28 Galileos utveckling till att bli en del av praktisk GNSSanvändning DAN NORIN
Hilti POS 15 / POS 18. totalstation. Mät- och utsättning med total enkelhet. Hilti. Outperform. Outlast.
 POS 15 / POS 18 totalstation Mät- och utsättning med total enkelhet. Hilti. Outperform. Outlast. POS 15 / POS 18 totalstation Användningsområde Utsättning av punkter och nivåer för utgrävning och formning
POS 15 / POS 18 totalstation Mät- och utsättning med total enkelhet. Hilti. Outperform. Outlast. POS 15 / POS 18 totalstation Användningsområde Utsättning av punkter och nivåer för utgrävning och formning
BYTE REFERENSSYSTEM LULEÅ SWEREF99/RH 2000
 BYTE REFERENSSYSTEM LULEÅ SWEREF99/RH 2000 FRÅN TILL PLAN LULEÅ LOKALA RT 38 5 gon O (72:-1) RT R12 R12 5 gon O (72:-1) SWEREF 99.21.45 HÖJD RH 00 RH 2000 RT 90 6 Projektioner SWEREF 99 12 Projektioner
BYTE REFERENSSYSTEM LULEÅ SWEREF99/RH 2000 FRÅN TILL PLAN LULEÅ LOKALA RT 38 5 gon O (72:-1) RT R12 R12 5 gon O (72:-1) SWEREF 99.21.45 HÖJD RH 00 RH 2000 RT 90 6 Projektioner SWEREF 99 12 Projektioner