Fördröjning och bortfall av nätverkskorrektioner
|
|
|
- Jonathan Sundström
- för 6 år sedan
- Visningar:
Transkript
1 Fördröjning och bortfall av nätverkskorrektioner osäkerhetskällor för nätverks-rtk? Lena Morén och Matilda Stenbacka 2013 Examensarbete, Grundnivå (kandidatexamen), 15 hp Lantmäteriteknik Lantmätarprogrammet. Teknisk inriktning. Handare: Stig-Göran Mårtensson Examinator: Yuriy Reshetyuk
2 Förord Rapporten är ett examensarbete på kandidatnivå som avslutar vår utbildning på Lantmätarprogrammet med teknisk inriktning på Högskolan i Gävle. Arbetet har utförts på uppdrag av Geodesienheten på Lantmäteriet i Gävle. Tack till Lars Jämtnäs på Lantmäteriet som varit vår handare och hjälpt oss med råd och vägning. Vi vill även tacka övrig personal på Geodesienheten för all hjälp med våra frågor. Tack också till vår handare på Högskolan Stig-Göran Mårtensson som de in oss på rätt spår. Gävle, maj 2013 Lena Morén och Matilda Stenbacka i
3 Sammanfattning Nätverks-RTK är en realtidsteknik för noggrann positionering med hjälp av Global Navigation Satellite Systems (GNSS). Tekniken innebär att användaren utnyttjar korrektionsdata från ett nätverk av GNSS-mottagare med kända positioner (referensstationer) för att minska osäkerheten i positionen för den egna GNSS-mottagaren (rover). Detta ställer dock krav på att korrektionsdata kan överföras problemfritt till användaren i realtid. Vanligen sker den överföringen via mobiltelefoni. Lantmäteriet driver en rikstäckande nätverks-rtk-tjänst, där användarna kan erhålla korrektionsdata via GSM eller mobilt Internet (GPRS). Nätverks-RTK-tjänsten baseras på ett rikstäckande nät av fasta referensstationer för GNSS, SWEPOS, vilket också används för andra tillämpningar. Syftet med studien är att undersöka hur fördröjning och bortfall i överföringen av nätverkskorrektioner påverkar mätning med SWEPOS nätverks-rtk-tjänst. För det ändamålet användes tre mottagare av fabrikaten Leica, Trimble och Topcon som parallellt tog emot signaler via en fast extern GNSS-antenn under mycket goda mottagningsförhållanden. En särskild programvara användes för att skapa fördröjningar och bortfall av korrektionsdata till de tre mottagarna. Resultaten visade att tröskelvärdet, där fördröjning och bortfall gör att mottagarna inte längre kan beräkna en noggrann position, varierade mellan fabrikaten. Leica var mest känslig för bortfall, Trimble för fördröjningar, medan Topcon stod sig bra för båda. Vid ny initialisering av fixlösning krävdes att databortfall och fördröjning inte var för stora för någon av fabrikaten. Positionsavvikelserna beroende på bortfall och fördröjning av korrektionsmeddelanden visar på en signifikant skillnad mellan radiella planavvikelser och höjdavvikelser, speciellt vid höga bortfall. Fördröjningar på 0 4 s och olika bortfall har generellt liten påverkan på standardosäkerheternas värden i latitud- och longitud. I höjd är genomgående standardosäkerheten 1,5 2 gånger större än vad den är i plan. Baslinjelängdens betydelse är inte så stor, en marginell ökning av standardosäkerheten kunde ses vid ökning från 10 km till 30 km. ii
4 Abstract Network RTK is a real-time technique for accurate positioning with Global Navigation Satellite Systems (GNSS). The technology means the use of correction data from a network of GNSS receivers with known positions (reference stations) to reduce the uncertainty in position for the user s GNSS receiver (rover). However, this requires that the correction data can be transferred seamlessly to the user in real time. Commonly the corrections are transferred via mobile phones. The Swedish National Land Survey operates a nationwide Network RTK service, where users can receive correction data via GSM or mobile Internet (GPRS). Network RTK service is based on a nationwide network of permanent reference stations for GNSS, SWEPOS which is also used for other applications. The aim of the study is to examine how the delay and loss in the transmission of network corrections affect measurement with Network RTK service from SWEPOS. Three receivers of different types, Trimble, Topcon and Leica were used to receive signals (all three at the same time) via a fixed external GNSS antenna with very good receiving conditions. Special software was used to create delays and loss of correction data from correction data to the three receivers. The results show that the threshold where delay and loss means that receivers can no longer calculate a precise position varies between brands. Leica was the most sensitive to loss of correction data, Trimble for delays, while Topcon held up well for both. A new initialization requires that data loss and delay are not too large. Position deviations due to loss and delay of correction data indicate a significant difference between radial plane deviations and height deviations, especially at high loss of correction data. Delays of 0 4 s and various losses of correction data have generally small impact on the standard uncertainty values in latitude and longitude. The standard uncertainty in height is times higher than it is in plane. The impact of the baseline length is not significant, a marginal increase in the standard uncertainty was seen when increasing from 10 km to 30 km. iii
5 Innehållsförteckning 1 Introduktion Bakgrund Positionsbestämning med GNSS Nätverks-RTK Dataöverföring vid nätverks-rtk Osäkerhetskällor vid mätning med nätverks-rtk Problembeskrivning och syfte Tidigare studier Metod Utrustning Förberedelser Datainsamling Analys Resultat Tröskelvärden Kvalitetsindikator i GGA-meddelande Mätosäkerhet Diskussion Resultat Metod Framtida studier Referenser Bilaga A GGA-meddelande Bilaga B NMEA-inställningar Bilaga C Mätschema Bilaga D Jonosfärsförhållanden Bilaga E Standardosäkerheter, baslinjelängd 10 km Bilaga F Standardosäkerheter, baslinjelängd 30 km Bilaga G Differenser mellan standardosäkerheterna för olika baslinjelängder. 37 Bilaga H Den 95:e percentilen iv
6 1 Introduktion 1.1 Bakgrund Positionsbestämning med GNSS Global Navigation Satellite Systems (GNSS) är en metod som använder satelliter som referens för positionsbestämning. Det finns två system som är väl fungerande: det amerikanska Global Positioning System (GPS) och det ryska Globalnaya Navigatsionnaya Sputnikovaya Sistema (GLONASS). Ytterligare två system är under uppbyggnad, det europeiska Galileo och det kinesiska BeiDou. Positionsbestämning med GNSS kan utföras som absolut bestämning eller som relativ bestämning (Hoffman-Wellenhof, Lichtenegger & Collins, 2001). Absolutmätning med kod är den enklaste och vanligaste formen som endast kräver en mottagare men ger en osäkerhet på flera meter därför att de inverkande osäkerhetskällorna direkt påverkar mottagarens position. Osäkerheten kan reduceras genom längre mättider (Lantmäteriet m.fl., 2011), eller genom relativmätning. Relativmätning innebär att minst två mottagare används, varav den ena är placerad på en känd punkt (en så kallad referensmottagare) och den andra är den som ska positionsbestämmas (en så kallad rover) Nätverks-RTK Nätverks-RTK (Real Time Kinematic) är en form av relativmätning, vilket är en teknik för noggrann positionering i realtid. Tekniken används huvudsakligen för professionella tillämpningar baserat på ett nätverk av referensstationer. Utsättning, detaljmätning, maskinstyrning, jordbrukstillämpningar är exempel på användningsområden för nätverks-rtk. Lantmäteriet driver en rikstäckande nätverks-rtk-tjänst, där användarna kan erhålla kvalitetskontrollerade korrektionsdata via mobilnätet (GSM 1 ) eller mobilt internet (GPRS 2 ) istället för att använda egen referensstation. RTK-tjänsten baseras på SWEPOS, vilket är ett rikstäckande nät av fasta referensstationer för GNSS, för olika tillämpningar (SWEPOS, u.å.). Det är viktigt att uppkopplingen är stabil och att 1 Global System for Global communications 2 General Packet Radio Service 1
7 dataöverföringen inte är fördröjd då dessa kan påverka osäkerheten negativt (Norin, Engfeldt, Öberg & Jämtnäs, 2010). Lantmäteriets nätverks-rtk-tjänst använder Virtual Reference Station (VRS) för att sända korrektionsdata (Norin m.fl., 2010). VRS innebär att en virtuell referensstation skapas i närheten av mottagaren som baseras på data från de närmaste verkliga referensstationerna i nätet. Rovern tolkar en VRS på samma sätt som en vanlig referensstation. Därmed kan låg mätosäkerhet erhållas även vid längre avstånd till verkliga fysiska referensstationer inom nätet. För att det ska vara möjligt krävs det att överföringen av korrektionerna sker över en tillförlitlig datakommunikationskanal (Hu, Khoo, Goh & Law, 2002). Enligt Emardson, Jarlemark, Bergstrand, Nilsson och Johansson (2009) finns det två andra metoder för att hantera nätverkskorrektioner, Master-Auxiliary Concept (MAC) och Flächenkorrekturparamtern (FKP). MAC använder den referensstation i nätet som ligger närmast mottagaren som masterstation, och lämpliga stationer i övrigt blir auxiliary stationer (hjälpstationer). Korrektioner skapas baserat på masterstationen och korrektionsskillnader från hjälpstationer. FKP innebär att områdeskorrektionsparametrar skapas för omgivande referensstationer Dataöverföring vid nätverks-rtk National Marine Electronics Association (NMEA) meddelande är en standard som bygger på seriell dataöverföring, och en typ av NMEA-meddelande är Global Positioning System Fixed Data (GGA), ett textmeddelande som visar bl.a. koordinater, höjd, positionsindikatorkvalitet mm (bilaga A). GNSS-mottagaren sänder NMEA-meddelande för att uppge sin ungefärliga position till nätverks- RTK-tjänsten. Tillbaka skickas korrektioner i formatet Radio Technical Committee for Marine Services (RTCM). RTCM är ett standardformat som används för överföring av GNSS-data i realtid. När RTCM 3.1 introducerades 2006 blev det möjligt att sända ut nätverks-rtk-meddelanden med envägskommunikation (Lilje, Engfeldt & Jivall, 2007). RTCM 3.1 är kompatibel att sända nätverkskorrektioner för FKP, MAC och Radio Technical Commission for Maritime Services, 2011 (VRS). Ntrip är ett http-baserat protokoll speciellt designat för transport av GNSS-data över Internet (Yan, 2007), vilket innebär 2
8 nätverks- transport av RTCM via internetprotokoll. GNSS-utrustningen måste vara kompatibel att hantera Ntrip vid anslutning via Internet Osäkerhetskällor vid mätning med nätverks-rtk Satellitgeometrin, det geometriska förhållandet mellan satelliter och GNSSmottagare, påverkar osäkerheten vid positionering med GNSS (Lantmäteriet m.fl., 2011). Utöver denna kan osäkerhetskällorna delas upp i tre grupper: satellitrelaterade, atmosfärsrelaterade och mottagarelaterade. Med satellitrelaterade osäkerhetskällor avses osäkerheterna vid beräkning av ban- och klockparametrar och signalfördröjningar som orsakats av hårdvaran i satelliterna. Dessa osäkerhetskällor kan som regel elimineras helt vid relativ mätning. Atmosfärsrelaterade är de osäkerhetskällor som uppstår vid signalens passage från satellit till GNSS-mottagare, hit räknas också flervägsfel (multipath) i den här framställningen. Dessa osäkerhetskällor har större påverkan än de satellitrelaterade, men kan reduceras med hjälp av modeller vid relativ mätning (Lantmäteriet m.fl., 2011). Den sista gruppen, de mottagarrelaterade osäkerhetsskällorna, avser GNSS-mottagaren. De omfattar bland annat eventuella skillnader mellan antennens elektriska och geometriska centrum och även de slumpmässiga fel som uppstår vid kod- respektive fasmätning. Genom att korrigera för antennens elektriska centrum och använda tillräckligt långa mätserier kan även dessa osäkerhetskällors påverkan reduceras. 1.2 Problembeskrivning och syfte De senaste årens utveckling av den trådlösa tekniken innebär att datakommunikationskanaler ska hantera större mängder data med allt högre hastigheter. Den större belastningen som detta innebär kan i praktiken resultera i att fördröjningar och bortfall av data uppkommer i mobilnäten. Med fördröjning avses tiden det tar för korrektionerna att överföras från referensstation till mottagare, omkodas och hanteras av mjukvaran. En annan orsak till bortfall och fördröjningar kan vara dålig eller ingen täckning i mobilnätet. Ytterligare en begränsning kan vara att trådlös överföring sker med standarder som ursprungligen utformats för trådbunden överföring. Nätverks-RTK-tekniken förutsätter att korrektionsdata kan skickas till användarna i realtid, med korta 3
9 uppdateringsintervall. Det är därför viktigt att undersöka i vilken utsträckning brister i den mobila dataöverföringen påverkar mätning med nätverks-rtk. Syftet med studien är att undersöka hur fördröjning och bortfall av nätverkskorrektioner påverkar möjligheten att få fixlösning, samt om mätosäkerheten påverkas. Dessutom undersöks om denna påverkan skiljer sig åt vid två olika baslinjelängder samt mellan tre olika fabrikat av GNSS-mottagare. 1.3 Tidigare studier Vid positionsbestämning med enkelstations-rtk undersöks i en studie av El- Mowafy (2002) om fördröjning i datakommunikationskanalen, som vid mättillfället var en radio, har någon signifikant påverkan på mätosäkerheten. Fördröjningen visar sig inte ha någon signifikant påverkan på resultatet, några millimeter som mest. Beroende på vilken datakommunikationskanal som används, avstånd mellan mottagare och referensstationer och mätförhållandena kan fördröjningen variera mellan 0,1 till ett par sekunder. Flera studier har visat att korrektionsfördröjningen vid nätverks-rtk-mätningen sällan överstiger 3 4 s när GPRS används som kommunikationskanal, se exempelvis Hu m.fl. (2002). Detta innebär att man bör vara medveten om att de koordinater som registreras vid mätningstillfället kanske inte alltid är de korrekta. Den observationstid som krävs för ett tillförlitligt resultat beror på ett flertal faktorer, bl.a. avståndet till referensstationer (Lantmäteriet m.fl., 2011). För att minimera effekten av systematiska avvikelser, dvs. korrelation mellan mätningarna, krävs enligt studier av Kjørsvik (2002) och Jämtnäs och Alm (2005) att RTK-mätningar inte sker med för korta tidsintervall. Enligt Yang, Hill, Meng och Aponte (2009) fokuseras mycket av forskningen inom nätverks-rtk kring referensstationernas prestanda och att kunna minimera antalet referensstationer. Längre avstånd ger ändrade förutsättningar för transporten av korrektionsmeddelandena då de har en tidsbegränsad giltighet. En utmaning för dataöverföringen vid nätverks-rtk är därför att bibehålla en pålitlig och hög överföringshastighet över längre avstånd (Yang m.fl., 2009). Stankov och Jakowski (2007) påvisar att aktiviteter i jonosfären påverkar positionernas osäkerhet vid mätning med nätverks-rtk. Vid mätning bör därför jonosfärsförhållandena kontrolleras. 4
 och en extern chokering-antenn")


10 2 Metod 2.1 Utrustning Vid mätningarna användes tre GNSS-mottagare av tre olika fabrikat (figur 1 och tabell 1) och en extern chokering-antenn av märket Javad. Fördröjningar och stokastiska, dvs. slumpmässigt utvalda bortfall av nätverkskorrektionerna skapades med hjälp av programmet DelayRTCM utvecklat av M. Håkanson vid geodesienheten på Lantmäteriet i Gävle. För att logga de korrigerade positionerna användes programmet Advanced NMEA Data Logger Figur 1. De tre mottagarna som användes vid mätningarna. Från vänster Trimble, Topcon och Leica. Tabell 1. GNSS-utrustningar som användes i studien. Fabrikat Trimble Topcon Leica Mottagare Trimble R8 Leica Viva Hiper SR GNSS GNSS GS15 Antenntyp Integrerad i Integrerad i Integrerad i mottagare mottagare mottagare Handenhet TSC3 Tesla CS10 5
11 2.2 Förberedelser För att undersöka hur stora bortfall och fördröjningar av nätverkskorrektioner de tre instrumenten tolererar utan att förlora fixlösning, dvs. när mottagarna inte längre kan beräkna noggrann position, utfördes den 23 april 2013 mätningar på Lantmäteriet i Gävle. Uppkoppling mot SWEPOS skedde och fördröjningar och bortfall på korrektionerna lades till. Samtidigt kontrollerades instrumentens positionsstatus i displayen på respektive mottagare. Om fixlösning tappades eller inte noterades. Klarade instrumenten att hålla fixlösningen provades högre procent bortfall och längre fördröjning. Detta upprepades tills tröskelvärden för respektive instrument hittades dvs. då fixlösning inte längre var stabil, utan tappades. Vid några tillfällen blinkade indikatorn för fixlösning fram och tillbaka, detta anges i resultatet som ostabil fixlösning. Utifrån resultatet bestämdes vilka fördröjningar och bortfall som skulle användas i studien eftersom studien grundas på att instrumenten har fixlösning. Fördröjning att undersöka blev 0, 1, 2, 3 och 4 s och stokastiskt bortfall 0, 20, 40, 60 och 80 %. Tiden för mätningen bestämdes till 15 min per mätning. 2.3 Datainsamling Mätningarna utfördes från den 2 till 17 maj De tre GNSS-mottagarna konfigurerades att logga RTK-mätdata i form av en NMEA GGA-sträng varje sekund (se bilaga B). Figur 2. Översikt över uppkopplingen inför mätning med bortfall och fördröjningar av korrektioner. 6
12 En simulerad miljö för nätverks-rtk-mätning skapades enligt figur 2. Signalerna från GPS- och GLONASS-satelliterna fördelades med hjälp av ett antennsplitter från den externa chokering-antennen belägen på taket på Lantmäteriets huvudkontor i Gävle ner till de tre GNSS-mottagarna av olika fabrikat (Leica, Trimble och Topcon). Den externa antennen är stabilt monterad i en miljö med mycket liten påverkan av lokala osäkerhetskällor som flervägsfel och sikthinder. Uppkopplingen till Internet (och nätverks-rtk-tjänsten) skedde via en trådlös anslutningspunkt och en dator med fast IP-adress. Mottagarnas position skickades in som ett GGA-meddelande i NMEA-format till tjänsten, och tillbaka skickades korrektioner i RTCM-format (Norin m.fl., 2010). Med hjälp av dessa korrektionsdata, i kombination med egna observationer, beräknade mottagarna därefter RTK-positioner. Ett mätschema (bilaga C) följdes för mätningarna. Inför varje mätning noterades datum och klockslag samt aktuellt jonosfärsförhållande (bilaga D). Fördröjningar och stokastiska bortfall av korrektionerna skapades med hjälp av programmet DelayRTCM som var installerad på den ovannämnda datorn. Fördröjningen anges i programmet i 1-sekundssteg (0 och uppåt) och bortfallen i procentenheter (0 100 %). De RTCM 3.1-meddelanden som uteslöts stokastiskt med hjälp av programmet var 1004 (GPS-observationer för L1/L2) och 1012 (GLONASSobservationer för L1/L2). Därefter loggades GGA-meddelanden med korrigerad position från de tre mottagarna varje sekund till en dator via COM-portar. Mätningarna utfördes med två olika baslinjelängder, där Mårtsbo 10 km (figur 3) och Norrsundet 30 km (figur 4) var närmaste fysiska referensstationer. Syftet var att utvärdera om fördröjning och bortfall påverkar mätningen beroende på baslinjelängd. 7
13 Figur 3. Testnätet med baslinjelängden 10 km till Mårtsbo som närmaste fysiska referensstation. Mårtsbo Figur 4. Testnätet med baslinjelängden 30 km till Norrsundet som närmaste fysiska referensstation. 2.4 Analys Begrepp rekommenderade i GUM (Guide to the expression of Uncertainty in Measurement) (JCGM 100:2008, 2010) används i rapporten. Data från mätningarna sammanställdes i MS Excel, där även höjdkorrigeringar för rätt 8
14 absolut antennmodell utfördes enligt National Geodetic Survey (u.å.) i den mån detta var möjligt. Koordinaterna i GGA-meddelandena erhölls i SWEREF 99 (latitud, longitud). Hur höjden visades varierade mellan olika mottagarna men korrigerades till att visa höjd över ellipsoiden. Kvalitetsindikatorn i GGAmeddelandet kontrollerades för att se om fixlösning erhållits. För att underlätta tolkningen av resultatet beräknades avvikelser, mellan mätt position och den externa antennens kända position, i longitud-, latitud- och höjd. Dessa omvandlades från grader till millimeter enligt ekvation (2) i latitud och ekvation (3) i longitud (Johansson & Persson, 2008). mm (2) mm (3) där är avvikelsen i bågsekunder, 30,9 är antalet meter för en bågsekund på ekvatorn för modelljorden GRS 80. ( = latituden) korrigerar för longitudkonvergensen i latitud. Konstanten 1000 omvandlar meter till millimeter. Därefter räknades avvikelserna från seriens medelvärde i longitud- och latitud om till radiella avvikelser i plan, enligt ekvation (4), och avvikelser i höjd räknades enligt ekvation (5): (4) (5) där Δhöjd är ursprungliga avvikelser i höjd. Syftet med att subtrahera medelvärdet var att normera fördelningarna, dvs. ta bort systematiska avvikelser som berodde på dåligt bestämda facitkoordinater, tillfälliga osäkerhetskällor och felaktig antennmodell. För att erhålla ett spridningsmått på respektive mätserie beräknades standardosäkerheten av avvikelserna enligt ekvation (6): 9
15 (6) där är mätseriens medelvärde av avvikelser, n är antalet observationer, och x är enskilda avvikelser. En percentilanalys utfördes vid 95 %, vilket innebär att avvikelserna sorterades i stigande ordning för att hitta värdet vid 95 %. 10


16 3 Resultat 3.1 Tröskelvärden Hur stora fördröjningar och bortfall av nätverkskorrektioner de olika GNSSmottagarna klarade utan att tappa fixlösning visas som orangefärgade fält i figur 5 till 7. Figur 5. Tröskelvärden för Trimble. Figur 6. Tröskelvärden för Topcon. 11
. Nedan redovisas vilken positionsstatus de tre mottagarna har haft vid mätningarna 2 17 maj.")
17 Figur 7. Tröskelvärden för Leica. 3.2 Kvalitetsindikator i GGA-meddelande I ett av fälten i GGA-meddelandena erhållna från GNSS-mottagarna visas positionsstatusen för mottagaren, dvs. fixlösning, flytlösning eller ingen giltig lösning alls. (För utförligare beskrivning se bilaga A). Nedan redovisas vilken positionsstatus de tre mottagarna har haft vid mätningarna 2 17 maj. Vid varje mättillfälle (á 15 min) erhölls 900 GGA-meddelanden per instrument. Positionsstatusen på GGA-meddelandena från Trimble indikerade på att mätningarna med Trimble enbart haft fixlösning. Vid mätningar med Topcon för den längre (30 km långa) baslinjelängden och 80 % bortfall av nätverkskorrektioner fanns 5 meddelanden (av totalt 900) som indikerade på flytlösning när fördröjningen var 1 s, 2 meddelanden när fördröjningen var 3 s och 5 meddelanden när fördröjningen var 4 s. Resterande meddelanden indikerade fixlösning. Tabell 2 visar antalet meddelanden där positionsindikatorn indikerade flytlösning vid mätning med Leica. Resterande meddelanden indikerade fixlösning. 12
18 Tabell 2. Leicas positionsindikators indikeringar för flytlösning vid olika fördröjningar, bortfall och baslinjelängder. Fördröjning [s] / Bortfall [%] Baslinjelängd 10 km Baslinjelängd 30 km 0/ / / / / / / Mätosäkerhet Alla standardosäkerheter redovisas i bilagorna E, F och G. Standardosäkerheten varierade mellan värden angivna i tabell 3. Tabell 3. Variationen i mm för standardosäkerheterna vid 0 till 4 s fördröjning och olika bortfall och baslinjelängder. Baslinjelängd 10 km Bortfall Baslinjelängd 30 km Bortfall [%] [%] Latitud 4,3 10,5 0 Latitud 4,4 6,9 0 Latitud 6,0 10,2 80 Latitud 3,5 9,8 80 Longitud 3,6 6,7 0 Longitud 2,6 5,2 0 Longitud 2,7 7,6 80 Longitud 2,6 6,8 80 Höjd 9,7 13,4 0 Höjd 6,8 10,9 0 Höjd 7,5 27,7 80 Höjd 5,9 22,6 80 I figurerna 8 till 19 visas en jämförelse mellan avvikelserna för de olika baslinjelängderna vid 0 och 4 sekunders fördröjning samt 0 och 80 % bortfall, i plan (radiell avvikelse) och avvikelse i höjd. Det 95:e percentilvärdet för radiella plan- och höjdavvikelserna visas i bilaga H. 13
19 Avvikelse i plan (mm) Figur 8. Fördelningen av radiella planavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. Avvikelse i plan (mm) Figur 9. Fördelningen av radiella planavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. 14
20 Avvikelse i plan (mm) Figur 10. Fördelningen av radiella planavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. Avvikelse i plan (mm) Figur 11. Fördelningen av radiella planavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. 15
21 Avvikelse i plan (mm) Figur 12. Fördelningen av radiella planavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. Avvikelse i plan (mm) Figur 13. Fördelningen av radiella planavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. 16
22 Avvikelse i höjd (mm) Figur 14. Fördelningen av höjdavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. Avvikelse i höjd (mm) Figur 15. Fördelningen av höjdavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. 17
23 Avvikelse i höjd (mm) Figur 16. Fördelningen av höjdavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. Avvikelse i höjd (mm) Figur 17. Fördelningen av höjdavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. 18
24 Avvikelse i höjd (mm) Figur 18. Fördelningen av höjdavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. Avvikelse i höjd (mm) Figur 19 Fördelningen av höjdavvikelser vid baslinjelängderna 10 km (Mårtsbo) och 30 km (Norrsundet) vid 0 % och 80 % bortfall av korrektioner. 19
25 4 Diskussion 4.1 Resultat Tröskelvärdena vid fördröjning och bortfall för fixlösning varierade mellan de olika mottagarna. Leica-mottagaren reagerade mest och tidigast av de tre mottagarna på bortfall av korrektionsdata i tröskelvärdestestet. Topcon och Leica indikerade med blinkande indikator även på områden där fixlösningen var ostabil. Vid ny initialisering efter tappad fixlösning krävdes generellt att fördröjning och bortfall av korrektionsdata inte fick vara för höga; ca 5 9 s fungerade för samtliga mottagare. När väl fixlösning erhållits kunde bortfall och fördröjning ökas igen. Leica-mottagarens känslighet för höga bortfall resulterade i ett antal GGAmeddelanden som redovisas i tabell 2 där kvalitetsindikatorn indikerade flytlösning. Topcon indikerade ett fåtal medan Trimble var den enda mottagare som inte indikerade någon flytlösning på kvalitetsindikatorn i GGAmeddelandena under mätningarna. Fördröjningar på 0 4 s och olika bortfall har generellt liten påverkan på standardosäkerheternas värden i latitud- och longitud för baslinjelängderna 10 och 30 km. Två mätningar i intervallet 0 60 % bortfall (bilagorna E och F: Topcon, 10 km, 2 s, 0 % och Topcon, 30 km, 4 s, 20 %) undantas från den fortsatta analysen då de avviker allt för mycket från serien för att vara representativa. Genomgående tendens hos alla tre mottagarna är ökningen av standardosäkerheten i plan med ökande fördröjning och baslinjelängd (bilaga G), förvisso liten, men systematisk. I höjd är genomgående standardosäkerheten 1,5 2 gånger större än vad den är i plan, vidare kan en tendens till ökning med antalet fördröjningssekunder ses i höjd för baslinjen 10 km, inte lika påtagligt för baslinjen 30 km. En tydlig ökning av standardosäkerheten i höjd kan ses vid 4 s fördröjning och vid bortfallet 80 % för baslinjelängden 10 km, även vid 3 s fördröjning för Topcon. Samma tendens kan ses för baslinjelängden 30 km, men inte lika markant. Genomgående gäller också för Topcon att höjdkomponentens standardosäkerhet 20
26 är större än hos de andra två mottagarna. Liknande resultat i höjd har även Yang m.fl. (2009) visat i sin studie om nätverks-rtk-korrektionsöverföring. Av ovanstående, och med hjälp av tabellerna E och F, befästs också de teoretiska och empiriska skillnaderna i standardosäkerheter mellan latitud-, longitud- och höjdkomponenterna: latitudkomponenten är större än longitudkomponenten, och höjdkomponenten cirka 1,5 2 gånger större än dessa. Inbördes förhållanden mestadels betingade av ogynnsam satellitkonfiguration (Lantmäteriet m.fl., 2011). Studier av standardosäkerheterna för baslinjelängderna 10 km och 30 km (bilagorna E och F) visar att standardosäkerheterna måttligt ökar för Trimble med ökande fördröjning och bortfall, speciellt gäller det höjdkomponenten. Även hos Topcon finns en sådan tendens, dock inte lika uttalad som för Trimble. Leica verkar vara mer stabil. Vid jämförelse av positionsavvikelser vid 10 km respektive 30 km baslinjelängder som överskrider den 95:e percentilen (bilaga H), visar alla tre fabrikaten på förhållandevis likartade värden. Vid jämförelser mellan fabrikaten visar Topcon genomgående på högre värden än Trimble och Leica, mest påtagligt vid stora bortfall, men även vid mindre bortfall och lägre fördröjning hade Topcon en del höga avvikelser. Även Leica hade en del högre avvikelser vid 80 % bortfall vid den 95:e percentilen. Graferna i figurerna 8 19 visar att de olika baslinjelängdernas beräknade avvikelser i de flesta fall ligger samlade vid 0 och 80 % bortfall. I några av graferna visas en variation av avvikelserna vid olika baslinjelängder; bl.a. i grafen för Trimble (figur 8) visas att baslinjelängd 10 km har större avvikelse vid 0 s fördröjning än 30 km baslinjelängd, detta kan bero på få mätningar eller på mättillfället. En längre baslinjelängd behöver inte innebära större osäkerhet än vid en kortare, även andra faktorer som exempelvis atmosfäriska störningar och satellitkonfiguration påverkar. Vid 4 s fördröjning för Trimble ses en ökning av planavvikelser vid 80 % bortfall för båda baslinjelängderna (figur 9), något som indikerar att positioneringen blir osäkrare vid bortfall av korrektionsmeddelanden. Jämförs de radiella 21
27 planavvikelsernas och höjdavvikelsernas fördelningar så ses en signifikant skillnad med avseende på procentuellt bortfall, speciellt vid 4 s fördröjning. 4.2 Metod Det finns inte något bra standardförfarande för att utföra den här typen av undersökning, mest p.g.a. skillnader i hur de olika fabrikaten hanterar antennmodeller och dataloggning. Detta medförde en del problem vid mätningsförfarandet. Begränsningar vid konfigureringen av antennmodell i utrustningen resulterade i att det elektriska centrumet ej kunde korrigeras för på rätt sätt. Enbart i Leica Viva GS15 fanns möjlighet att välja rätt extern antennmodell, i övriga utrustningar fanns inte den möjligheten. Därför redovisas inga avvikelser från den absoluta positionen för den externa antennen, istället redovisas standardosäkerheten samt värdena vid den 95:e percentilen för respektive mätserie och instrument. Utgångsförfarandet var att logga NMEA-meddelandena från de tre mottagarna i VRS3-servern men på grund av begränsningar i möjligheten att konfigurera vilka tidsintervall NMEA-meddelandena skulle skickas in till Ntrip-klienten i de tre mottagarna valdes istället att logga meddelande i en dator som kopplats ihop med mottagarna via seriella portar. Vid en sådan uppkoppling krävdes extra utrustning utöver standardutrustningen. En ny option krävdes i Leica Viva GS15 för att kunna sända GGA-meddelanden. Till Topcon krävdes en seriell kabel, och till Trimble krävdes ett separat program (GPS-configurator) för att kunna konfigurera mottagaren till att skicka GGA och välja önskat tidsintervall. Leica sänder tre meddelande per tillfälle, ett för GPS-signaler, ett för GLONASS-signaler samt ett med en kombination av de båda. Trimble och Topcon använder enbart ett meddelande med kombinerade signaler per tillfälle. 4.3 Framtida studier En undersökning av fördröjning och bortfall av korrektionsdata vid rörelse kan också vara av intresse. Även vad som händer med koordinaternas osäkerheter vid högre fördröjningar av korrektioner kan vara värt att undersökas. I nuläget är 22
28 GPRS vanligast att använda vid mobil uppkoppling. Hur fungerar det att överföra korrektionsdata via Net 1 eller 4G? 23
29 Referenser El-Mowafy, A. (2000). Performance Analysis of the RTK Technique in an Urban Environment. Australian Surveyor, 45(1), doi: / Emardson, R., Jarlemark, P., Bergstrand, S., Nilsson, T. & Johansson, J. (2009).Measurement accuracy in Network-RTK (SP Report, 2009:23). Borås: SP Sveriges Tekniska Forskningsinstitut Från Hoffman-Wellenhof, B., Lichtenegger, H. & Collins, J. (2001). Global Positioning Systems: Theory and Practice (5 th ed.). Wien: Springer. Hu, G.R., Khoo, H.S., Goh, P.C. & Law, C.L. (2002).Internet-based GPS VRS RTK Positioning with a Multiple Reference Station Network.Journal of Global Positioning Systems, 1(2), JCGM 100:2008 (2010). Evaluation of measurement data Guide to the expression of uncertainty in measurement. First edition 2008, Corrected version Hämtad den 20 april 2013 från JCGM100:2008, Johansson, D. & Persson, S. (2008). Kommunikationsalternativ för nätverks-rtk: - virtuell referensstation kontra nätverksmeddelande. Examensarbete. Högskolan i Gävle. Instutionen för teknik och byggd miljö. Jämtnäs, L. & Alm, L. (2005). Fältstudie av Internet-distribuerad nätverks-rtk. (LMV-rapport, 2005:4). Gävle: Lantmäteriet. Kjørsvik, N. (2002, april). Assessing the Multi-Base Station GPS Solutions, Artikel presenterad på FIG XXII International Congress. Washington D.C., USA, Hämtad från: 24
30 Lantmäteriet m.fl. (2011). Geodetisk och fotogrammetrisk mätnings- och beräkningsteknik. Kap 12. Hämtad den 5 maj 2013 från Lantmäteriet, GPS%20och%20m%C3%A4tning/Handbok%20m%C3%A4t- %20och%20kartfr%C3%A5gor/Utbildning/Kompendium_ pdf Leica Geosystems (u.å.) Leica Viva Series: Technical Reference Manual. Version 4.0. The SmartWorx Viva DVD. Hämtad den 22 maj 2013 från Leica Geosystems, Lilje, C., Engfeldt, A., & Jivall, L. (2007). Introduktion till GNSS (LMV-rapport, 2007:11). Gävle: Lantmäteriet. National Geodetic Survey (u.å.).individual Absolute Calibrations. Hämtad den 22 maj 2013 från National Geodetic Survey, Norin, D., Engfeldt, A., Öberg, S. & Jämtnäs, L. (2010). Kortmanual för mätning med SWEPOS Nätverks-RTK-Tjänst. (LMV-rapport, 2006:2). Gävle: Lantmäteriet. Radio Technical Commission for Maritime Services. (2011). RTCM standard : Differential GNSS (Global Navigation Satellite Systems) services version 3 [Broschyr]. Från Stankov, S.M. & Jakowski, N. (2006). Ionospheric effects on GNSS reference network integrity. Journal of Atmospheric and solar-terrestrial Physics, 69, doi: /j.jartp SWEPOS. (u.å.). Ett nationellt nät av fasta referensstationer för GPS. Hämtad 21 maj 2013 från SWEPOS, Trimble Navigation Limited (2004). Trimble R7/R8 GPS Receiver: User Guide. Version 2.10 (R7), 2.11 (R8). Revision A. June U.S.A 25
31 Yan, T. (2007, 4-6 december). Test results from the next generation of NTRIP. Artikel presenterad på IGNSS Symposium i Sidney, Australien. Hämtad från: nferencenonpeerreviewedpapers/tabid/88/default.aspx Yang, L., Hill, C., Meng, X. & Aponte, J. (2009). Quality evaluation of NRTK correction transmission. Coordinates, 5 (2), Från 26
32 Bilaga A GGA-meddelande Exempel på en GGA-sträng från GNSS-mottagare av tre fabrikat; Leica, Topcon och Trimble. Tabell A1 till A3 visar förklaringar för de olika fälten i GGAmeddelandet som avskiljs med kommatecken. Trimble $GPGGA, , ,N, ,E,4,15,0.8,30.549,M, ,M,4.0,0215*7E Tabell A1. Förklaring av GGA-meddelandet från Trimble (Trimble Navigation Limited, 2004). Fält Förklaring 1 $GNGGA 2 UTC of position fix 3 Latitude N= North 4 S =South 5 Longitude E = East 6 W = West GPS Quality indicator 0 = Fix not valid 1 = GPS fix 7 2 = DGPS fix 4 = RTK, fixed integers 5 = RTK, float integers 8 Number of SVs in use 9 HDOP 10 Ortometric height 11 M = Meters 12 Geoid separation 13 M = Meters 14 Age of dgps data record 15 Reference station ID 16 Checksum 27
33 Topcon: $GPGGA, , ,N, ,E,4,15,0.78, ,M, ,M,3.0,0213*44 Tabell A2. Förklaring av GGA-meddelandet från Topcon. Topcon support. personlig kommunikation 3 juni Fält Förklaring 1 $GNGGA 2 UTC time 3 Latitude 4 N= North S =South 5 Longitud 6 7 E = East W = West Fix quality: 0 = invalid 1 = GPS fix (SPS) 2 = DGPS fix 3 = PPS fix 4 = Real Time Kinematic 5 = Float RTK 6 = estimated (dead reckoning) (2.3 feature) 7 = Manual input mode 8 = Simulation mode 8 Number of satellites being tracked 9 HDOP 10 Altitude, above mean sea level 11 M = Meters 12 Height of geoid (mean sea level) above WGS84 ellipsoid 13 M = Meters 14 Time in seconds since last DGPS update 15 DGPS station ID number 16 The checksum data 28
34 Leica $GNGGA, , ,N, ,E,4,15,0.7,55.560,M,,,0.3 0,0214*00 Tabell A3. Förklaring av GGA-meddelandet från Leica (Leica Geosystems, u.å.). Fält Förklaring $--GGA GP = GPS 1 GL = GLONASS GN = Kombinerad 2 UTC time of position (hhmmss.ss) 3 Latitude (WGS 84) N = North 4 S = South 5 Longitude (WGS 84) E = East 6 W = West Position quality indicator 0 = Fix not available or invalid 1 = No real-time position, navigation fix 7 2 = Real-time position, ambiguities not fixed 3 = Valid fix for GNSS Precise Positioning Service mode, for example WAAS 4 = Real-time position, ambiguities fixed 8 Number of satellites in use 9 HDOP Altitude of position marker above/below mean sea level. (If no ortometric height 10 is available the local ellipsoidal height will be exported. If local ellipsoidal height is not available either, the WGS 1984 ellipsoidal height will be exported.) 11 Units of altitude Geoidal separation in meters. The geoidal separation is the difference between 12 the WGS 1984 earth ellipsoid surface and mean sea level. 13 Units of geoidal separation 14 Age of DGPS-data 15 Base station ID 16 Checksum 29
35 Bilaga B NMEA-inställningar Inställningar för NMEA-meddelanden i de olika mottagarna. Trimble Programmet GPS configurator laddades ner enligt instruktioner från Trimble Supporten. Börja med att definiera en port och koppla in en seriekabel mellan dator och mottagaren. Sätt port till 2, output till NMEA och välj intervallet 1 sekund. Baud rate ska vara Topcon Redigera mätprofilen i Magnet Field. När du kommer till rutan Config:Rover Receiver klicka på knappen längst ner till vänster Peripherals. Kryssa i rutan för NMEA ports och välj 1. Klicka sedan på grön bock. Klicka ett antal gånger på nästa tills du kommer till menyn Config: Output Radio 1 och ändra parametrar enligt följande. Radio Modem: Generic, Port: B, Parity: None, Data: 8, Baud: och stop: 1. Tryck på Nästa och välj GGA och intervallet 1 sekund. Klicka på grön bock. Leica Gå till Instrument/Instrumentkontakt/Alla kopplingar- fliken Roverinterface. Kryssa i rutan utdata NMEA. Anslut med GS port 2, RS232 och ange följande parametrar: Baud rate: , Paritet: ingen, Data Bits: 8, Stop Bit: 1, Flödeskontroll: ingen. I samtliga fall gäller: Anslut till på COM-porten med samma baudrate som i mottagarinställningarna. 30


36 Bilaga C Mätschema Datum och starttid för mätningarna med kort baslinjelängd och Mårtsbo som närmaste referensstation visas i Tabell C1. För mätningarna med lång baslinjelängd och Norrsundet som närmaste referensstation visas datum och starttid i Tabell C2. Alla mätningar varade i 15 min. Tabell C1. Mätschema för mätningar med Mårtsbo som närmaste referensstation. Tabell C4. Mätschema för mätningar med Norrsundet som närmaste referensstation. 31
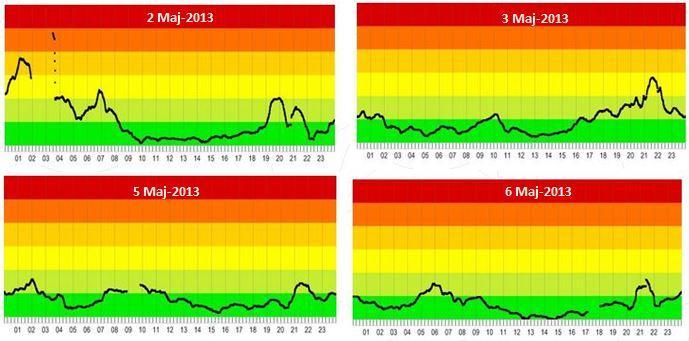
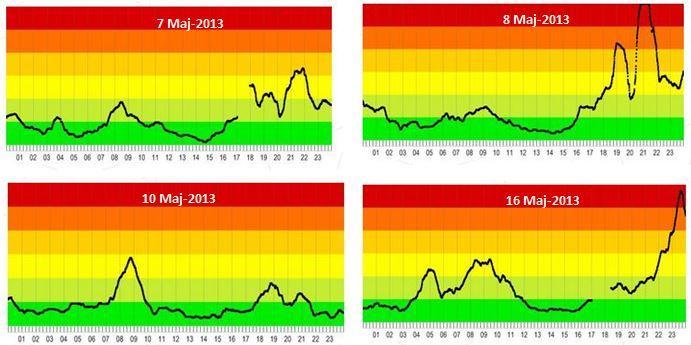

37 Bilaga D Jonosfärsförhållanden Jonosfärens aktiviteter under mätningarna. (SWEPOS, u.å.) 32
38 Bortfall % Bortfall % Bortfall % Bilaga E Standardosäkerheter, baslinjelängd 10 km Tabell E1 till E5 visar standardosäkerheterna för mätningarna med baslinjelängd 10 km. Tabell E1. Standardosäkerheter i mm vid 0 s fördröjning, baslinjelängden 10 km och olika bortfall. Trimble Topcon Leica Höjd Höjd Höjd 0 4,3 4,7 7,9 10,5 6,7 13,0 4,5 4,7 8,7 20 7,1 4,3 8,4 6,3 6,5 15,6 7,4 4,3 8,6 40 3,8 3,1 7,1 8,7 5,5 19,4 5,0 3,6 7,9 60 4,9 2,0 8,0 5,7 3,4 14,3 5,5 2,8 9,6 80 6,0 2,7 7,5 9,7 4,8 16,0 6,2 4,5 9,8 Tabell E2. Standardosäkerheter i mm vid 1 s fördröjning, baslinjelängden 10 km och olika bortfall. Trimble Topcon Leica Höjd Höjd Höjd 0 4,8 3,4 6,2 4,9 4,2 13,5 5,2 3,3 6,8 20 3,7 2,1 8,4 4,1 4,2 7,7 4,8 2,6 8,9 40 3,5 2,4 7,9 5,0 3,8 16,5 4,2 2,8 10,0 60 3,5 3,5 10,1 5,9 4,4 17,9 4,7 4,1 12,6 80 4,4 2,6 9,2 7,0 5,5 15,6 7,7 4,6 12,0 Tabell E3. Standardosäkerheter i mm vid 2 s fördröjning, baslinjelängden 10 km och olika bortfall. Trimble Topcon Leica Höjd Höjd Höjd 0 4,4 3,1 9,6 10,2 4,4 29,9 5,4 3,7 10,3 20 4,5 3,8 8,9 5,2 5,6 17,2 4,0 5,4 11,3 40 4,0 2,5 10,7 4,3 3,5 15,1 4,7 3,1 12,5 60 3,6 2,9 7,6 4,7 4,2 12,3 5,2 3,8 10,8 80 3,3 2,6 8,5 7,1 9,3 15,4 7,3 6,2 12,5 33
39 Bortfall % Bortfall % Tabell E4. Standardosäkerheter i mm vid 3 s fördröjning, baslinjelängden 10 km och olika bortfall. Trimble Topcon Leica Höjd Höjd Höjd 0 4,2 3,2 10,5 8,0 4,3 22,8 5,1 3,3 8,9 20 5,0 3,3 7,6 5,6 5,1 13,7 4,9 4,7 8,9 40 5,0 5,7 12,1 6,4 6,3 13,8 6,2 6,4 14,0 60 5,2 2,9 9,0 7,9 6,3 19,4 5,8 6,0 14,2 80 6,2 3,5 9,6 9,9 7,1 27,2 6,4 6,4 13,9 Tabell E5. Standardosäkerheter i mm vid 4 s fördröjning, baslinjelängden 10 km och olika bortfall. Trimble Topcon Leica Höjd Höjd Höjd 0 4,9 3,6 10,7 5,3 6,0 13,4 5,1 4,4 12,9 20 5,0 3,6 9,5 6,5 5,0 14,8 5,7 3,9 12,3 40 4,6 3,7 10,4 6,1 5,8 14,4 5,5 4,5 12,8 60 4,1 4,1 10,4 6,2 6,3 16,9 4,7 5,4 11,4 80 7,4 5,9 27,7 10,2 7,2 24,2 8,0 7,6 23,9 34
40 Bortfall % Bortfall % Bortfall % Bilaga F Standardosäkerheter, baslinjelängd 30 km Tabell F1 till F5 visar standardosäkerheterna för mätningarna med baslinjelängd 30 km. Tabell F1. Standardosäkerheter i mm vid 0 s fördröjning, baslinjelängden 30 km och olika bortfall. Trimble Topcon Leica Höjd Höjd Höjd 0 4,4 2,6 9,5 5,2 2,0 10,9 4,7 2,0 6,8 20 4,1 2,7 7,9 5,6 4,4 16,1 4,1 2,8 8,8 40 4,7 3,5 9,9 4,8 4,1 16,0 4,5 4,2 10,8 60 4,0 3,2 8,6 4,7 6,2 10,6 4,5 5,1 10,3 80 3,5 2,6 5,9 7,0 5,1 15,4 5,5 4,9 11,9 Tabell F2. Standardosäkerheter i mm vid 1 s fördröjning, baslinjelängden 30 km och olika bortfall. Trimble Topcon Leica Höjd Höjd Höjd 0 5,0 3,5 9,1 5,0 6,7 12,3 4,1 4,4 6,7 20 4,0 3,6 9,2 8,2 5,2 13,5 3,5 3,8 10,3 40 6,6 4,6 9,8 5,5 3,8 13,3 5,0 4,5 9,9 60 5,4 3,1 10,6 7,7 3,7 17,5 4,7 3,3 11,0 80 7,4 3,0 11,1 10,9 8,0 14,2 6,9 4,4 13,3 Tabell F3. Standardosäkerheter i mm vid 2 s fördröjning, baslinjelängden 30 km och olika bortfall. Trimble Topcon Leica Höjd Höjd Höjd 0 4,4 3,2 9,7 6,6 5,0 15,1 5,3 3,1 9,9 20 6,9 4,8 9,6 6,0 5,4 8,8 6,0 4,6 9,0 40 6,1 3,4 9,8 6,1 4,7 14,0 6,1 3,6 9,6 60 5,1 4,2 8,4 6,7 4,8 13,0 6,1 4,3 9,4 80 5,0 3,7 10,0 6,4 5,2 15,8 6,2 4,2 16,1 35
41 Bortfall % Bortfall % Tabell F4. Standardosäkerheter i mm vid 3 s fördröjning, baslinjelängden 30 km och olika bortfall. Trimble Topcon Leica Höjd Höjd Höjd 0 5,9 5,5 9,6 7,6 6,7 13,9 5,4 5,4 5,4 20 5,5 3,9 8,5 6,2 6,9 9,4 4,4 4,4 4,4 40 5,0 3,8 13,6 4,6 4,9 12,8 4,3 4,3 4,3 60 4,8 3,0 13,6 5,8 3,9 12,9 5,6 5,6 5,6 80 4,6 3,7 14,0 8,5 6,2 18,3 5,6 5,6 5,6 Tabell F5. Standardosäkerheter i mm vid 4 s fördröjning, baslinjelängden 30 km och olika bortfall. Trimble Topcon Leica Höjd Höjd Höjd 0 5,3 3,3 9,7 6,9 5,2 10,0 4,5 3,7 10,5 20 5,4 5,5 10,5 6,9 11,3 17,9 4,7 5,3 13,8 40 7,5 4,0 8,5 10,4 5,5 12,6 6,9 3,8 8,2 60 6,7 4,6 12,2 8,8 4,9 17,9 6,7 4,3 12,6 80 7,9 4,6 13,4 9,6 6,8 22,6 8,4 5,7 17,2 36
42 Bortfall % Bortfall % Bortfall % Bilaga G Differenser mellan standardosäkerheterna för olika baslinjelängder Tabell G1 till G5 visar skillnader i osäkerheter vid olika baslinjelängder. Tabell G1. Skillnader i mm mellan osäkerheter för baslinjelängderna 30 km och 10 km vid 0 sekunders fördröjning. Trimble Topcon Leica Höjd Höjd Höjd 0 +0,1 2,1 +1,6 5,3 4,7 2,1 +0,2 2,8 1,9 20 3,0 1,6 0,5 0,7 2,1 +0,5 3,3 1,5 +0, ,9 +0,4 +2,8 3,9 1,4 3,4 0,5 +0,6 +2,9 60 0,9 +1,2 +0,6 1,0 +2,8 3,7 1,0 +2,3 +0,7 80 2,5 0,1 1,6 2,7 +0,3 0,6 0,7 +0,4 +2,1 Tabell G2. Skillnader i mm mellan osäkerheter för baslinjelängderna 30 km och 10 km vid 1 sekunds fördröjning. Trimble Topcon Leica Höjd Höjd Höjd 0 +0,2 +0,1 +2,9 +0,1 +2,5 1,2 1,1 +1,1 0, ,3 +1,5 +0,8 +4,1 +1,0 +5,8 1,3 +1,2 1, ,1 +2,2 +1,9 +0,5 0,0 3,2 +0,8 +1,7 0, ,9 0,4 +0,5 +1,8 0,7 0,4 0,0 0,8 1, ,0 +0,4 +1,9 +3,9 +2,5 1,4 0,8 0,2 +1,3 Tabell G3. Skillnader i mm mellan osäkerheter för baslinjelängderna 30 km och 10 km vid 2 sekunders fördröjning. Trimble Topcon Leica Höjd Höjd Höjd 0 0,0 +0,1 +0,1 3,6 +0,6 14,8 0,1 0,6 0, ,4 +1,0 +0,7 +0,8 0,2 8,4 +2,0 0,8 2, ,1 +0,9 0,9 +1,8 +1,2 1,1 +1,4 +0,5 2, ,5 +1,3 +0,8 +2,0 +0,6 +0,7 +0,9 +0,5 1, ,7 +1,1 +1,5 0,7 4,1 +0,4 1,1 2,0 +3,6 37
43 Bortfall % Bortfall % Tabell G4. Skillnader i mm mellan osäkerheter för baslinjelängderna 30 km och 10 km vid 3 sekunders fördröjning. Trimble Topcon Leica Höjd Höjd Höjd 0 +1,7 +2,3 0,9 0,4 +2,4 8,9 +0,3 +2,1 3, ,5 +0,6 +0,9 +0,6 +1,8 4,3 0,5 0,3 4,5 40 0,0 1,9 +1,5 1,8 1,4 1,0 1,9 2,1 9,7 60 0,4 +0,1 +4,6 2,1 2,4 6,5 0,2 0,4 8,6 80 1,6 +0,2 +4,4 1,4 0,9 8,9 0,8 0,8 8,3 Tabell G5. Skillnader i mm mellan osäkerheter för baslinjelängderna 30 km och 10 km vid 4 sekunders fördröjning. Trimble Topcon Leica Höjd Höjd Höjd 0 +0,4 0,3 1,0 +1,6 0,8 3,4 0,6 0,7 2, ,4 +1,9 +1,0 +0,4 +6,3 +3,1 1,0 +1,4 +1, ,9 +0,3 1,9 +4,3 0,3 1,8 +1,4 0,7 4, ,6 +0,5 +1,8 +2,6 1,4 +1,0 +2,0 1,1 +1, ,5 1,3 14,4 0,6 0,4 1,6 +0,4 1,9 6,7 38
44 Bortfall (%) Bortfall (%) Bortfall (%) Bilaga H Den 95:e percentilen Tabell H1 till H6 visar det 95:e percentilvärdet i mm plan och höjd för de olika mottagarna vid olika baslinjelängder; 10 km (Mårtsbo) och 30 km (Norrsundet). Tabell H1. Den 95:e percentilen för Trimble med Mårtsbo som närmaste referensstation. Trimble 10 km Fördröjning (s) Fördröjning (s) Plan Höjd Tabell H2. Den 95:e percentilen för Trimble med Norrsundet som närmaste referensstation. Trimble 30 km Fördröjning (s) Fördröjning (s) Plan Höjd Tabell H3. Den 95:e percentilen för Topcon med Mårtsbo som närmaste referensstation. Topcon 10 km Fördröjning (s) Fördröjning (s) Plan Höjd
45 Bortfall (%) Bortfall (%) Bortfall (%) Tabell H4. Den 95:e percentilen för Topcon med Norrsundet som närmaste referensstation. Topcon 30 km Fördröjning (s) Fördröjning (s) Plan Höjd Tabell H5. Den 95:e percentilen för Leica med Mårtsbo som närmaste referensstation. Leica 10 km Fördröjning (s) Fördröjning (s) Plan Höjd Tabell H6. Den 95:e percentilen för Leica med Norrsundet som närmaste referensstation. Leica 30 km Fördröjning (s) Fördröjning (s) Plan Höjd
GPS del 2. Sadegh Jamali
 GPS del 2 Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 GPS-mätmetoder Absolut positionering (en
GPS del 2 Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 GPS-mätmetoder Absolut positionering (en
GPS del 2. Sadegh Jamali. kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, och Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH)
; Lars Ollvik och Sven Agardh (LTH)") GPS del 2 Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, och Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Satellit positionering typer Absolut positionering (en
GPS del 2 Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, och Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Satellit positionering typer Absolut positionering (en
Strategi för datadistribution
 Uppdragsnr: 10141701 1 (8) PM Strategi för datadistribution Upprättad av: Helena von Malmborg, WSP Samhällsbyggnad Sara Hederos, WSP Samhällsbyggnad Stockholm 2011-11-21 WSP Samhällsbyggnad 121 88 Stockholm-Globen
Uppdragsnr: 10141701 1 (8) PM Strategi för datadistribution Upprättad av: Helena von Malmborg, WSP Samhällsbyggnad Sara Hederos, WSP Samhällsbyggnad Stockholm 2011-11-21 WSP Samhällsbyggnad 121 88 Stockholm-Globen
Introduktion till GNSS
 Introduktion till GNSS Christina Lilje SWEPOS-seminariet 16 oktober 2007 Gävle Satellitsystem GNSS - Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering och positionsbestämning
Introduktion till GNSS Christina Lilje SWEPOS-seminariet 16 oktober 2007 Gävle Satellitsystem GNSS - Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering och positionsbestämning
Lantmäteriets testmätningar med RTK och Galileo i SWEPOS fram till januari 2017
 PM 2017-01-24 Lantmäteriets test med RTK och Galileo i SWEPOS fram till januari 2017 STEFAN ÖBERG, DAN NORIN, FREDRIK STEDT Sammanfattning SWEPOS Nätverks-RTK-tjänst har under många år använt kombinationen
PM 2017-01-24 Lantmäteriets test med RTK och Galileo i SWEPOS fram till januari 2017 STEFAN ÖBERG, DAN NORIN, FREDRIK STEDT Sammanfattning SWEPOS Nätverks-RTK-tjänst har under många år använt kombinationen
Undersökning av mätosäkerheten i det förtätade SWEPOS -nätet i Stockholmsområdet
 Undersökning av mätosäkerheten i det förtätade SWEPOS -nätet i Stockholmsområdet vid mätning med nätverks-rtk Jakob Jansson 2011 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik Lantmätarprogrammet
Undersökning av mätosäkerheten i det förtätade SWEPOS -nätet i Stockholmsområdet vid mätning med nätverks-rtk Jakob Jansson 2011 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik Lantmätarprogrammet
Jämförelse av höjdmätning med olika GNSS-mottagare i SWEPOS nätverks-rtk-tjänst
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Jämförelse av höjdmätning med olika GNSS-mottagare i SWEPOS nätverks-rtk-tjänst Annika Fredriksson & Madeleine
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Jämförelse av höjdmätning med olika GNSS-mottagare i SWEPOS nätverks-rtk-tjänst Annika Fredriksson & Madeleine
Undersökning av mätosäkerheten i det förtätade SWEPOS-nätet i Stockholmsområdet
 LMV-Rapport 2011:2 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av mätosäkerheten i det förtätade SWEPOS-nätet i Stockholmsområdet vid mätning med nätverks-rtk Examensarbete av
LMV-Rapport 2011:2 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av mätosäkerheten i det förtätade SWEPOS-nätet i Stockholmsområdet vid mätning med nätverks-rtk Examensarbete av
Vilka konsekvenser kan solstormar. Lund 21 maj 2012. Gunnar Hedling och Peter Wiklund gunnar.hedling@lm.se Ragne Emardsson och Per Jarlemark SP
 Vilka konsekvenser kan solstormar ha för GNSS-användningen? Seminariedag Solstormar I samhället Lund 21 maj 2012 Gunnar Hedling och Peter Wiklund gunnar.hedling@lm.se Ragne Emardsson och Per Jarlemark
Vilka konsekvenser kan solstormar ha för GNSS-användningen? Seminariedag Solstormar I samhället Lund 21 maj 2012 Gunnar Hedling och Peter Wiklund gunnar.hedling@lm.se Ragne Emardsson och Per Jarlemark
Undersökning av nätverks-rtk-meddelande tillsammans med olika GNSS-mottagare
 Undersökning av nätverks-rtk-meddelande tillsammans med olika GNSS-mottagare vid nätverks-rtk-mätning i SWEPOS -nät av fasta referensstationer Rebecka Lundell 2012 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik
Undersökning av nätverks-rtk-meddelande tillsammans med olika GNSS-mottagare vid nätverks-rtk-mätning i SWEPOS -nät av fasta referensstationer Rebecka Lundell 2012 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik
Undersökning av. tillsammans med olika GNSSmottagare
 Lantmäterirapport 2012:3 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av nätverks-rtkmeddelande tillsammans med olika GNSSmottagare vid nätverks-rtk-mätning i SWEPOS nät av fasta
Lantmäterirapport 2012:3 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av nätverks-rtkmeddelande tillsammans med olika GNSSmottagare vid nätverks-rtk-mätning i SWEPOS nät av fasta
Felsökning av kommunikation mellan DLS och GPS mottagare.
 Felsökning av kommunikation mellan DLS och GPS mottagare. 1. Anslut GPS mottagaren till datorn med en kommunikationskabel. Starta sedan både GPS och datorn. En förutsättning för att kunna presentera positionen
Felsökning av kommunikation mellan DLS och GPS mottagare. 1. Anslut GPS mottagaren till datorn med en kommunikationskabel. Starta sedan både GPS och datorn. En förutsättning för att kunna presentera positionen
GNSS-status och Galileoanvändning
 GNSS-status och Galileoanvändning vid nätverks-rtk Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Stefan Öberg Lantmäteriet, stefan.oberg@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
GNSS-status och Galileoanvändning vid nätverks-rtk Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Stefan Öberg Lantmäteriet, stefan.oberg@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
Global Positionering System (GPS)
") Global Positionering System (GPS) Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder
Global Positionering System (GPS) Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder
Forskning GNSS. Grundkonfigurationen av GPS består av 24 satelliter men idag cirkulerar närmare 30 satelliter runt jordklotet
 Forskning GNSS GNSS (Global Navigation Satellite Systems) är samlingsnamnet för globala satellitbaserade system för navigation, positionsbestämning och tidsöverföring. Det mest kända och använda systemet
Forskning GNSS GNSS (Global Navigation Satellite Systems) är samlingsnamnet för globala satellitbaserade system för navigation, positionsbestämning och tidsöverföring. Det mest kända och använda systemet
Bilaga 1: GPS-teknik, en liten ordlista
 Bilaga 1: GPS-teknik, en liten ordlista SATELLITSYSTEM GPS Global Positioning System. Amerikanskt satellitbaserat navigationssystem uppbyggt av USA:s försvarsmakt. Systemet är globalt täckande och används
Bilaga 1: GPS-teknik, en liten ordlista SATELLITSYSTEM GPS Global Positioning System. Amerikanskt satellitbaserat navigationssystem uppbyggt av USA:s försvarsmakt. Systemet är globalt täckande och används
Global Positionering System (GPS)
") Global Positionering System (GPS) Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder i lantmäteri
Global Positionering System (GPS) Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder i lantmäteri
Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst
 Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst I denna checklista redovisas en del allmänna råd angående hur nätverks-rtk-tekniken bör användas för att uppnå ett tillfredställande
Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst I denna checklista redovisas en del allmänna råd angående hur nätverks-rtk-tekniken bör användas för att uppnå ett tillfredställande
GPS GPS. Classical navigation. A. Einstein. Global Positioning System Started in 1978 Operational in ETI Föreläsning 1
 GPS GPS Global Positioning System Started in 1978 Operational in 1993 2011-02-22 ETI 125 - Föreläsning 1 2011-02-22 ETI 125 - Föreläsning 2 A. Einstein Classical navigation 2011-02-22 ETI 125 - Föreläsning
GPS GPS Global Positioning System Started in 1978 Operational in 1993 2011-02-22 ETI 125 - Föreläsning 1 2011-02-22 ETI 125 - Föreläsning 2 A. Einstein Classical navigation 2011-02-22 ETI 125 - Föreläsning
EXAMENSARBETE. Val av mätinstrument. Eli Ellvall Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Val av mätinstrument Eli Ellvall 2015 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser ( Val av mätinstrument Eli Ellvall
EXAMENSARBETE Val av mätinstrument Eli Ellvall 2015 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser ( Val av mätinstrument Eli Ellvall
Vad är god kvalitet vid mätning med GNSS/RTK?
 Vad är god kvalitet vid mätning med GNSS/RTK? MBK-dag, 4 november 2015 Lars Jämtnäs Enheten för geodetisk infrastruktur lars.jamtnas@lm.se Att bedöma kvalitet vid realtidsmätning Finns det något att jämföra
Vad är god kvalitet vid mätning med GNSS/RTK? MBK-dag, 4 november 2015 Lars Jämtnäs Enheten för geodetisk infrastruktur lars.jamtnas@lm.se Att bedöma kvalitet vid realtidsmätning Finns det något att jämföra
GNSS-mätning vid olika tidpunkter
 GNSS-mätning vid olika tidpunkter En studie om osäkerhet GNSS-measurements at different times A study of uncertainty Johan Törnvall Fakulteten för hälsa, natur- och teknikvetenskap Program: Mät- och kartteknikprogrammet
GNSS-mätning vid olika tidpunkter En studie om osäkerhet GNSS-measurements at different times A study of uncertainty Johan Törnvall Fakulteten för hälsa, natur- och teknikvetenskap Program: Mät- och kartteknikprogrammet
Trimtec.se - Auktoriserad Trimble dealer för hela Sverige
 Trimtec.se - Auktoriserad Trimble dealer för hela Sverige Auktoriserad Trimble återförsäljare Service Support Utbildning Uthyrning Försäljning Gatewing Vad vi kan erbjuda! Skanning Tillbehör Service Survey
Trimtec.se - Auktoriserad Trimble dealer för hela Sverige Auktoriserad Trimble återförsäljare Service Support Utbildning Uthyrning Försäljning Gatewing Vad vi kan erbjuda! Skanning Tillbehör Service Survey
Manual Sportident Onlinekontroll via GPRS
 Manual Sportident Onlinekontroll via GPRS 2010-08-22 Komponenter För att använda onlinekontroll över GPRS behövs tre delar: GPRS modul (GPRS-modem med samlingsbox och batterier). PC-mjukvara BBRClient
Manual Sportident Onlinekontroll via GPRS 2010-08-22 Komponenter För att använda onlinekontroll över GPRS behövs tre delar: GPRS modul (GPRS-modem med samlingsbox och batterier). PC-mjukvara BBRClient
Framtida satellitsystem och signaler - fördelar och utmaningar
 Framtida satellitsystem och signaler - fördelar och utmaningar G P S Jan Johansson Rymd och geovetenskap med Onsala rymdobservatorium, Chalmers tekniska högskola & SP Sveriges tekniska forskningsinstitut
Framtida satellitsystem och signaler - fördelar och utmaningar G P S Jan Johansson Rymd och geovetenskap med Onsala rymdobservatorium, Chalmers tekniska högskola & SP Sveriges tekniska forskningsinstitut
Jämförelse av höjdmätning med olika GNSSmottagare. SWEPOS Nätverks-RTKtjänst
 Lantmäterirapport 2015:1 Rapportserie: Geodesi och Geografiska informationssystem Jämförelse av höjdmätning med olika GNSSmottagare i SWEPOS Nätverks-RTKtjänst Examensarbete av Annika Fredriksson & Madeleine
Lantmäterirapport 2015:1 Rapportserie: Geodesi och Geografiska informationssystem Jämförelse av höjdmätning med olika GNSSmottagare i SWEPOS Nätverks-RTKtjänst Examensarbete av Annika Fredriksson & Madeleine
Höjdmätning med GNSS vägledning för olika mätsituationer
 LMV-Rapport 2010: 4 Rapportserie: Geodesi och Geografiska informationssystem Höjdmätning med GNSS vägledning för olika mätsituationer Sammanställd av Per-Ola Eriksson Gävle 2010 L A N T M Ä T E R I E T
LMV-Rapport 2010: 4 Rapportserie: Geodesi och Geografiska informationssystem Höjdmätning med GNSS vägledning för olika mätsituationer Sammanställd av Per-Ola Eriksson Gävle 2010 L A N T M Ä T E R I E T
Swema 05. Bruksanvisning vers 1.01 MB20130530
 Swema 05 Bruksanvisning vers 1.01 MB20130530 SWEMA AB Pepparv. 27 SE-123 56 FARSTA Tel: +46 8 94 00 90 Fax: +46 8 93 44 93 E-mail: swema@swema.se Hemsida: www.swema.se Innehållsförteckning: 1. Introduktion...
Swema 05 Bruksanvisning vers 1.01 MB20130530 SWEMA AB Pepparv. 27 SE-123 56 FARSTA Tel: +46 8 94 00 90 Fax: +46 8 93 44 93 E-mail: swema@swema.se Hemsida: www.swema.se Innehållsförteckning: 1. Introduktion...
Bruksanvisning. Swema AB Tel: 08-940090 www.swema.se. För support och nedladdning av aktuell programvara kontakta: 2006-05 - 01
 Bruksanvisning För support och nedladdning av aktuell programvara kontakta: Swema AB Tel: 08-940090 www.swema.se 2006-05 - 01 Beskrivning R1 gör exakt vad som krävs av en radonmätare. Vid en radonhalt
Bruksanvisning För support och nedladdning av aktuell programvara kontakta: Swema AB Tel: 08-940090 www.swema.se 2006-05 - 01 Beskrivning R1 gör exakt vad som krävs av en radonmätare. Vid en radonhalt
Nästa skottsekund (leap second) kommer att läggas till vid midnatt mellan den. 31 december 2016 och 1 januari :59:59 23:59:60 00:00:00
 kommer att läggas till vid midnatt mellan den. 31 december 2016 och 1 januari :59:59 23:59:60 00:00:00") Nästa skottsekund (leap second) kommer att läggas till vid midnatt mellan den 31 december 2016 och 1 januari 2017. 23:59:59 23:59:60 00:00:00 Här följer instruktioner för att hantera denna händelse. Vad
Nästa skottsekund (leap second) kommer att läggas till vid midnatt mellan den 31 december 2016 och 1 januari 2017. 23:59:59 23:59:60 00:00:00 Här följer instruktioner för att hantera denna händelse. Vad
Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik
 Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik I checklistan redovisas hur GNSS-tekniken bör användas vid klassisk statisk stomnätsmätning. Syftet
Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik I checklistan redovisas hur GNSS-tekniken bör användas vid klassisk statisk stomnätsmätning. Syftet
Realtidsmätning inom fastighetsbildning med Precise Point Positioning (PPP) Victor Kvarnström & Jessica Wallerström 2016-06-04
 Victor Kvarnström & Jessica Wallerström 2016-06-04") Realtidsmätning inom fastighetsbildning med Precise Point Positioning (PPP) Victor Kvarnström & Jessica Wallerström 2016-06-04 Examensarbete, 15 hp Lantmäteriteknik Lantmäteriingenjörsprogrammet, Högskolan
Realtidsmätning inom fastighetsbildning med Precise Point Positioning (PPP) Victor Kvarnström & Jessica Wallerström 2016-06-04 Examensarbete, 15 hp Lantmäteriteknik Lantmäteriingenjörsprogrammet, Högskolan
Studie av mätosäkerhet och tidskorrelationer vid mätning med. SWEPOS 35 km-nät
 Lantmäterirapport 2014:5 Rapportserie: Geodesi och Geografiska informationssystem Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i SWEPOS 35 km-nät Examensarbete av Kent Ohlsson
Lantmäterirapport 2014:5 Rapportserie: Geodesi och Geografiska informationssystem Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i SWEPOS 35 km-nät Examensarbete av Kent Ohlsson
Beijer Electronics AB 2000, MA00336A, 2000-12
 Demonstration driver English Svenska Beijer Electronics AB 2000, MA00336A, 2000-12 Beijer Electronics AB reserves the right to change information in this manual without prior notice. All examples in this
Demonstration driver English Svenska Beijer Electronics AB 2000, MA00336A, 2000-12 Beijer Electronics AB reserves the right to change information in this manual without prior notice. All examples in this
www.radonelektronik.se Bruksanvisning www.radonelektronik.se 2006-03 - 01
 www.radonelektronik.se Bruksanvisning www.radonelektronik.se 2006-03 - 01 Beskrivning R1 gör exakt vad som krävs av en radonmätare. Vid en radonhalt på 200 Bq/m 3 tar det endast 4 timmar att uppnå en statistisk
www.radonelektronik.se Bruksanvisning www.radonelektronik.se 2006-03 - 01 Beskrivning R1 gör exakt vad som krävs av en radonmätare. Vid en radonhalt på 200 Bq/m 3 tar det endast 4 timmar att uppnå en statistisk
SWEPOS. Studiebesök från SAMGIS Västernorrland Peter Wiklund Lantmäteriet, Geodetisk infrastruktur
 SWEPOS Studiebesök från SAMGIS Västernorrland 2016-02-24 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se Geodetisk infrastruktur Vår vision är att tillgodose samhällets behov av
SWEPOS Studiebesök från SAMGIS Västernorrland 2016-02-24 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se Geodetisk infrastruktur Vår vision är att tillgodose samhällets behov av
Förord. Gävle, april 2007
 LMV -Rapport 27:1 Rapportserie: Geodesi och Geografiska informationssystem En nä tverks-rtk - jä mfö relse mellan GP S och GP S/GLO N A SS Exam ensarbete av Fredrik Johnsson och Mattias W allerström G
LMV -Rapport 27:1 Rapportserie: Geodesi och Geografiska informationssystem En nä tverks-rtk - jä mfö relse mellan GP S och GP S/GLO N A SS Exam ensarbete av Fredrik Johnsson och Mattias W allerström G
MätKart 12 Luleå. Positionering och GPS utrustningar ProLocate KartSmart. Aris Kolovos
 MätKart 12 Luleå Positionering och GPS utrustningar ProLocate KartSmart Aris Kolovos Redan de gamla greker tog hjälp av solen på dagen och stjärnorna på natten för att navigera. Navigation Idag tar vi
MätKart 12 Luleå Positionering och GPS utrustningar ProLocate KartSmart Aris Kolovos Redan de gamla greker tog hjälp av solen på dagen och stjärnorna på natten för att navigera. Navigation Idag tar vi
EXAMENSARBETE. Totalstation jämförd med mmgps. David Olsson. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Totalstation jämförd med mmgps David Olsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Totalstation jämförd med mmgps
EXAMENSARBETE Totalstation jämförd med mmgps David Olsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Totalstation jämförd med mmgps
SWEPOS status och utveckling
 SWEPOS status och utveckling MBK temadag Rankhyttan 2015-11-04 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se SWEPOS Nationellt nät av fasta referensstationer för GNSS som är en
SWEPOS status och utveckling MBK temadag Rankhyttan 2015-11-04 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se SWEPOS Nationellt nät av fasta referensstationer för GNSS som är en
Faktorer som påverkar osäkerhet hos digitala terrängmodeller från UASdata
 Faktorer som påverkar osäkerhet hos digitala terrängmodeller från UASdata 2014-11-24 Yuriy Reshetyuk Stig-Göran Mårtensson Faktorer Matchningsalgoritmer Osäkerhet hos DTM Osäkerhet hos yttre orienteringsparametrar
Faktorer som påverkar osäkerhet hos digitala terrängmodeller från UASdata 2014-11-24 Yuriy Reshetyuk Stig-Göran Mårtensson Faktorer Matchningsalgoritmer Osäkerhet hos DTM Osäkerhet hos yttre orienteringsparametrar
PROGES PLUS THERMOSCAN RF. Instruktionsmanual V. 061115
 ThermoScan RF användarinstruktioner 1 PROGES PLUS THERMOSCAN RF Instruktionsmanual V. 061115 Viktigt! Den här manualen innehåller ett antal lösenord som endast är avsedda för administratörerna. Glöm inte
ThermoScan RF användarinstruktioner 1 PROGES PLUS THERMOSCAN RF Instruktionsmanual V. 061115 Viktigt! Den här manualen innehåller ett antal lösenord som endast är avsedda för administratörerna. Glöm inte
Kommunikationsalternativ för nätverks-rtk - virtuell referensstation kontra nätverksmeddelande
 INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ Kommunikationsalternativ för nätverks-rtk - virtuell referensstation kontra nätverksmeddelande Daniel Johansson Sören Persson Juni 2008 Examensarbete C-nivå, 15
INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ Kommunikationsalternativ för nätverks-rtk - virtuell referensstation kontra nätverksmeddelande Daniel Johansson Sören Persson Juni 2008 Examensarbete C-nivå, 15
Global Positioning System GPS
 Global Positioning System GPS (Navstar 2) Mahtab Nasiri mni03001@student.mdh.se CIDEV 2 Handledare: Gordana Dodig Grnkovic Västerås 2004-10-18 Sammanfattning Syftet med denna rapport är att ge en grundläggande
Global Positioning System GPS (Navstar 2) Mahtab Nasiri mni03001@student.mdh.se CIDEV 2 Handledare: Gordana Dodig Grnkovic Västerås 2004-10-18 Sammanfattning Syftet med denna rapport är att ge en grundläggande
Global Positioning System GPS i funktion
 Global Positioning System GPS i funktion Martin Åhlenius ECOP mas00001@student.mdh.se Andreas Axelsen ECOP aan00006@student.mdh.se 15 oktober 2003 i Sammanfattning Denna rapport försöker förklara funktionen
Global Positioning System GPS i funktion Martin Åhlenius ECOP mas00001@student.mdh.se Andreas Axelsen ECOP aan00006@student.mdh.se 15 oktober 2003 i Sammanfattning Denna rapport försöker förklara funktionen
Galileos påverkan vid Nätverks-RTK satellitpositionering i svåra miljöer
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan vid Nätverks-RTK satellitpositionering i svåra miljöer Stefan Johansson & Petter Tysk 2017
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan vid Nätverks-RTK satellitpositionering i svåra miljöer Stefan Johansson & Petter Tysk 2017
Hur används GNSS-tekniken idag och i framtiden. GIS-Samverkan Dalarna Falun 14 mars 2018 Kent Ohlsson
 Hur används GNSS-tekniken idag och i framtiden GIS-Samverkan Dalarna Falun 14 mars 2018 Kent Ohlsson Vad är GNSS? GNSS Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering
Hur används GNSS-tekniken idag och i framtiden GIS-Samverkan Dalarna Falun 14 mars 2018 Kent Ohlsson Vad är GNSS? GNSS Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering
Position Nokia N76-1
 Nokia N76-1 2007 Nokia. Alla rättigheter förbehållna. Nokia, Nokia Connecting People, Nseries och N76 är registrerade varumärken som tillhör Nokia Corporation. Andra produkt- och företagsnamn som det hänvisats
Nokia N76-1 2007 Nokia. Alla rättigheter förbehållna. Nokia, Nokia Connecting People, Nseries och N76 är registrerade varumärken som tillhör Nokia Corporation. Andra produkt- och företagsnamn som det hänvisats
Galileos påverkan på snabb statisk mätning vid korta baslinjer
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan på snabb statisk mätning vid korta baslinjer Per Eklund & Elias Olofsson 2018 Examensarbete,
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan på snabb statisk mätning vid korta baslinjer Per Eklund & Elias Olofsson 2018 Examensarbete,
Metodbeskrivning RUFRIS
 Metodbeskrivning RUFRIS Dokumenttitel: Underlag till metodbeskrivning RUFRIS Skapat av: Johan Vium Andersson Dokumentdatum: 2012-03-16 Dokumenttyp: Rapport Publikationsnummer 2012:210 Version: 1,0 Publiceringsdatum:
Metodbeskrivning RUFRIS Dokumenttitel: Underlag till metodbeskrivning RUFRIS Skapat av: Johan Vium Andersson Dokumentdatum: 2012-03-16 Dokumenttyp: Rapport Publikationsnummer 2012:210 Version: 1,0 Publiceringsdatum:
Konfigurering av nätverksanslutning i TSC2
 Konfigurering av nätverksanslutning i TSC2 För att kunna få tillgång till korrektioner från SWEPOS via GPRS behöver du en nätverksanslutning. Denna gör du genom att trycka på Windows symbolen uppe till
Konfigurering av nätverksanslutning i TSC2 För att kunna få tillgång till korrektioner från SWEPOS via GPRS behöver du en nätverksanslutning. Denna gör du genom att trycka på Windows symbolen uppe till
Leica mojo3d start första gången
 Leica mojo3d start första gången Generellt Denna instruktion visar hur du kommer igång med Leica mojo3d första gången. För mer detaljerade instruktioner se Leica mojo3d användarmanual. Beroende på version
Leica mojo3d start första gången Generellt Denna instruktion visar hur du kommer igång med Leica mojo3d första gången. För mer detaljerade instruktioner se Leica mojo3d användarmanual. Beroende på version
Jämförelse av Epos och nätverks-dgps
 LMV-Rapport 26:5 Rapportserie: Geodesi och Geografiska informationssystem Jämförelse av Epos och nätverks-dgps Examensarbete av Helena von Malmborg Gävle 26 L A N T M Ä T E R I E T Copyright 26-6-29 Författare
LMV-Rapport 26:5 Rapportserie: Geodesi och Geografiska informationssystem Jämförelse av Epos och nätverks-dgps Examensarbete av Helena von Malmborg Gävle 26 L A N T M Ä T E R I E T Copyright 26-6-29 Författare
web: www.injektor.com 2003-09-12 e-mail: info@injektor.com fax: 0709 66 78 96 tel: kontor 08-753 00 04, Toby Edmundsson mobil: 0704 38 01 99, Jan
 Quick-Start Manual TempRecord Temprecord är ett välbeprövat system för att ta in mätdata och möjliggöra senare analys av dessa. Företaget har funnits en längre tid på marknaden och borgar för god kvalitet.
Quick-Start Manual TempRecord Temprecord är ett välbeprövat system för att ta in mätdata och möjliggöra senare analys av dessa. Företaget har funnits en längre tid på marknaden och borgar för god kvalitet.
PNSPO! Tips! Xpectia kommunikation till OMRON PLC via Seriellt. 14 mars 2012 OMRON Corporation
 PNSPO! Tips! Xpectia kommunikation till OMRON PLC via Seriellt 14 mars 2012 OMRON Corporation 2/24 Läs detta innan du bläddrar vidare PNSPO! Denna bok är avsedd som ett tillägg till de ursprungliga manualerna
PNSPO! Tips! Xpectia kommunikation till OMRON PLC via Seriellt 14 mars 2012 OMRON Corporation 2/24 Läs detta innan du bläddrar vidare PNSPO! Denna bok är avsedd som ett tillägg till de ursprungliga manualerna
OBS!!! Anslut ej USB kabeln till dator eller GPS innan du först har installerat drivrutinerna för USB kabeln i din dator.
 Navirad User Tool 3,7 Manual för GPS 1 Easy, GPS 2, GPS 4 samt Navirad Elite. Du kan ladda ner programmet från följande websida: Leta upp fliken Download och följ instruktionerna. http://www.tmobilteknik.com
Navirad User Tool 3,7 Manual för GPS 1 Easy, GPS 2, GPS 4 samt Navirad Elite. Du kan ladda ner programmet från följande websida: Leta upp fliken Download och följ instruktionerna. http://www.tmobilteknik.com
2.1 Installation of driver using Internet Installation of driver from disk... 3
 &RQWHQW,QQHKnOO 0DQXDOÃ(QJOLVKÃ'HPRGULYHU )RUHZRUG Ã,QWURGXFWLRQ Ã,QVWDOOÃDQGÃXSGDWHÃGULYHU 2.1 Installation of driver using Internet... 3 2.2 Installation of driver from disk... 3 Ã&RQQHFWLQJÃWKHÃWHUPLQDOÃWRÃWKHÃ3/&ÃV\VWHP
&RQWHQW,QQHKnOO 0DQXDOÃ(QJOLVKÃ'HPRGULYHU )RUHZRUG Ã,QWURGXFWLRQ Ã,QVWDOOÃDQGÃXSGDWHÃGULYHU 2.1 Installation of driver using Internet... 3 2.2 Installation of driver from disk... 3 Ã&RQQHFWLQJÃWKHÃWHUPLQDOÃWRÃWKHÃ3/&ÃV\VWHP
Galileos utveckling till att bli en del av praktisk GNSSanvändning
 2018-03-09 PM Artikel publicerad i Sveriges Kart- & Mätningstekniska Förenings (SKMF:s) tidskrift Sinus, nr 1 2018, sid 26 28 Galileos utveckling till att bli en del av praktisk GNSSanvändning DAN NORIN
2018-03-09 PM Artikel publicerad i Sveriges Kart- & Mätningstekniska Förenings (SKMF:s) tidskrift Sinus, nr 1 2018, sid 26 28 Galileos utveckling till att bli en del av praktisk GNSSanvändning DAN NORIN
GPS-Link version 1.7 Användarhandledning Kort & Matrikelstyrelsen och Chips Development Team
 GPS-Link version 1.7 Användarhandledning Kort & Matrikelstyrelsen och Chips Development Team 14 november 2006 All support av GPS-Link hänvisas via e-mail till dlssupport@sjofartsverket.se Vad är GPS-Link?
GPS-Link version 1.7 Användarhandledning Kort & Matrikelstyrelsen och Chips Development Team 14 november 2006 All support av GPS-Link hänvisas via e-mail till dlssupport@sjofartsverket.se Vad är GPS-Link?
Underlag till metodbeskrivning RUFRIS
 Uppdragsnr: 10141701 1 (7) PM Underlag till metodbeskrivning RUFRIS Upprättad av: Johan Vium Andersson, WSP Samhällsbyggnad 2011-11-09 WSP Samhällsbyggnad 121 88 Stockholm-Globen Besök: Arenavägen 7 Tel:
Uppdragsnr: 10141701 1 (7) PM Underlag till metodbeskrivning RUFRIS Upprättad av: Johan Vium Andersson, WSP Samhällsbyggnad 2011-11-09 WSP Samhällsbyggnad 121 88 Stockholm-Globen Besök: Arenavägen 7 Tel:
RAPPORT. Höjdmätning med RUFRIS
 RAPPORT Höjdmätning med RUFRIS Trafikverket Postadress: Rödavägen 1, 781 89 Borlänge E-post: trafikverket@trafikverket.se Telefon: 0771-921 921 TMALL 0004 Rapport generell v 2.0 Dokumenttitel: Höjdmätning
RAPPORT Höjdmätning med RUFRIS Trafikverket Postadress: Rödavägen 1, 781 89 Borlänge E-post: trafikverket@trafikverket.se Telefon: 0771-921 921 TMALL 0004 Rapport generell v 2.0 Dokumenttitel: Höjdmätning
Resultat av den utökade första planeringsövningen inför RRC september 2005
 Resultat av den utökade första planeringsövningen inför RRC-06 23 september 2005 Resultat av utökad första planeringsövning - Tillägg av ytterligare administrativa deklarationer - Variant (av case 4) med
Resultat av den utökade första planeringsövningen inför RRC-06 23 september 2005 Resultat av utökad första planeringsövning - Tillägg av ytterligare administrativa deklarationer - Variant (av case 4) med
Förväntad mätosäkerhet vid realtidsuppdaterad fri stationsetablering
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Förväntad mätosäkerhet vid realtidsuppdaterad fri stationsetablering En jämförelsestudie av olika fabrikat Daniel
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Förväntad mätosäkerhet vid realtidsuppdaterad fri stationsetablering En jämförelsestudie av olika fabrikat Daniel
Alias 1.0 Rollbaserad inloggning
 Alias 1.0 Rollbaserad inloggning Alias 1.0 Rollbaserad inloggning Magnus Bergqvist Tekniskt Säljstöd Magnus.Bergqvist@msb.se 072-502 09 56 Alias 1.0 Rollbaserad inloggning Funktionen Förutsättningar Funktionen
Alias 1.0 Rollbaserad inloggning Alias 1.0 Rollbaserad inloggning Magnus Bergqvist Tekniskt Säljstöd Magnus.Bergqvist@msb.se 072-502 09 56 Alias 1.0 Rollbaserad inloggning Funktionen Förutsättningar Funktionen
Swema 03. Bruksanvisning vers 1.01 MB
 Swema 03 Bruksanvisning vers 1.01 MB20130530 SWEMA AB Pepparv. 27 SE-123 56 FARSTA Tel: +46 8 94 00 90 Fax: +46 8 93 44 93 E-mail: swema@swema.se Hemsida: www.swema.se Innehållsförteckning: 1. Introduktion...
Swema 03 Bruksanvisning vers 1.01 MB20130530 SWEMA AB Pepparv. 27 SE-123 56 FARSTA Tel: +46 8 94 00 90 Fax: +46 8 93 44 93 E-mail: swema@swema.se Hemsida: www.swema.se Innehållsförteckning: 1. Introduktion...
performance by NEXUS NETWORK GPS Antenn Installation Manual
 performance by NEXUS NETWORK GPS Antenn Installation Manual GPS Antenna Svenska 14-1 Svenska GPS Antenna 1 Introduktion... 3 2 Montering... 3 2.1 Placering... 3 3 Installation... 4 4 Specifikationer...
performance by NEXUS NETWORK GPS Antenn Installation Manual GPS Antenna Svenska 14-1 Svenska GPS Antenna 1 Introduktion... 3 2 Montering... 3 2.1 Placering... 3 3 Installation... 4 4 Specifikationer...
Grundläggande teori om GNSS
 Grundläggande teori om GNSS Termen satellitmätning refererar till alla metoder som använder satelliter som referenspunkter för positionsbestämning. Idag (2010) finns det två fungerande satellitbaserade
Grundläggande teori om GNSS Termen satellitmätning refererar till alla metoder som använder satelliter som referenspunkter för positionsbestämning. Idag (2010) finns det två fungerande satellitbaserade
1. Introduktion Instruktionen utgörs av Radian Innovas handledning för ML-1.
 1(6) 1. Introduktion Instruktionen utgörs av Radian Innovas handledning för ML-1. 1.1 Allmänt ML-1 1. 2. 3. Strömbrytare, av/på Anslutning för datorkommunikation Manöverknappar ML-1 startar alltid i klockläge.
1(6) 1. Introduktion Instruktionen utgörs av Radian Innovas handledning för ML-1. 1.1 Allmänt ML-1 1. 2. 3. Strömbrytare, av/på Anslutning för datorkommunikation Manöverknappar ML-1 startar alltid i klockläge.
ANVÄNDAR MANUAL. SESAM 800 RX MC Manager
 ANVÄNDAR MANUAL SESAM 800 RX MC Manager Åkerströms Björbo AB Box 7, SE-780 45 Gagnef, Sweden street Björbovägen 143 SE-785 45 Björbo, Sweden Phone +46 241 250 00 Fax +46 241 232 99 E-mail sales@akerstroms.com
ANVÄNDAR MANUAL SESAM 800 RX MC Manager Åkerströms Björbo AB Box 7, SE-780 45 Gagnef, Sweden street Björbovägen 143 SE-785 45 Björbo, Sweden Phone +46 241 250 00 Fax +46 241 232 99 E-mail sales@akerstroms.com
Användarhandbok. MHL to HDMI Adapter IM750
 Användarhandbok MHL to HDMI Adapter IM750 Innehåll Inledning...3 MHL to HDMI Adapter-översikt...3 Komma igång...4 Smart Connect...4 Uppgradera Smart Connect...4 Använda MHL to HDMI Adapter...5 Ansluta
Användarhandbok MHL to HDMI Adapter IM750 Innehåll Inledning...3 MHL to HDMI Adapter-översikt...3 Komma igång...4 Smart Connect...4 Uppgradera Smart Connect...4 Använda MHL to HDMI Adapter...5 Ansluta
2004-11-14. Manual för RN - 20. www.radonelektronik.se
 2004-11-14 Manual för RN - 20 www.radonelektronik.se Display för direktavläsning av radonhalt Blinkande indikering för pågående mätning. Blinkar rött vid fel eller vid störning! Beskrivning Radonmätaren
2004-11-14 Manual för RN - 20 www.radonelektronik.se Display för direktavläsning av radonhalt Blinkande indikering för pågående mätning. Blinkar rött vid fel eller vid störning! Beskrivning Radonmätaren
GPS Antenn - Givare - Svensk English
 GPS Antenn - Givare - Installation Installationsmanual and Operation Manual Svensk English 1 1 Introduktion... 3 2 Montering... 3 2.1 Placering...3 3 Installation... 4 4 Specifikationer... 6 4.1 CE godkännande...6
GPS Antenn - Givare - Installation Installationsmanual and Operation Manual Svensk English 1 1 Introduktion... 3 2 Montering... 3 2.1 Placering...3 3 Installation... 4 4 Specifikationer... 6 4.1 CE godkännande...6
Vad händer med havsnivån i Stockholms län - vad behöver vi planera för? Sten Bergström SMHI
 Vad händer med havsnivån i Stockholms län - vad behöver vi planera för? Sten Bergström SMHI http://www.nasa.gov/topics/earth/features/ temp-analysis-2009.html Årsmedeltemperaturen ( C) i Sverige Baserad
Vad händer med havsnivån i Stockholms län - vad behöver vi planera för? Sten Bergström SMHI http://www.nasa.gov/topics/earth/features/ temp-analysis-2009.html Årsmedeltemperaturen ( C) i Sverige Baserad
Cargolog Impact Recorder System
 Cargolog Impact Recorder System MOBITRON Mobitron AB Box 241 561 23 Huskvarna, Sweden Tel +46 (0)36 512 25 Fax +46 (0)36 511 25 Att mäta är att veta Vi hjälper dig och dina kunder minska skador och underhållskostnader
Cargolog Impact Recorder System MOBITRON Mobitron AB Box 241 561 23 Huskvarna, Sweden Tel +46 (0)36 512 25 Fax +46 (0)36 511 25 Att mäta är att veta Vi hjälper dig och dina kunder minska skador och underhållskostnader
FÄLTMÄTINSTRUKTION C.A 1510
 1(9) 1. Allmänt är ett instrument som mäter koldioxid (CO 2 ), temperatur och luftfuktighet. Efter avslutad mätning åskådliggörs insamlad data genom att koppla instrumentet via medföljande USB-kabel eller
1(9) 1. Allmänt är ett instrument som mäter koldioxid (CO 2 ), temperatur och luftfuktighet. Efter avslutad mätning åskådliggörs insamlad data genom att koppla instrumentet via medföljande USB-kabel eller
Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i Swepos 35 km-nät
 Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i Swepos 35 km-nät Kent Ohlsson Master of Science Thesis in Geodesy No. 3132 TRITA-GIT EX 14-008 School of Architecture and the
Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i Swepos 35 km-nät Kent Ohlsson Master of Science Thesis in Geodesy No. 3132 TRITA-GIT EX 14-008 School of Architecture and the
Styrteknik: Binära tal, talsystem och koder D3:1
 Styrteknik: Binära tal, talsystem och koder D3:1 Digitala kursmoment D1 Boolesk algebra D2 Grundläggande logiska funktioner D3 Binära tal, talsystem och koder Styrteknik :Binära tal, talsystem och koder
Styrteknik: Binära tal, talsystem och koder D3:1 Digitala kursmoment D1 Boolesk algebra D2 Grundläggande logiska funktioner D3 Binära tal, talsystem och koder Styrteknik :Binära tal, talsystem och koder
A study of the performance
 A study of the performance and utilization of the Swedish railway network Anders Lindfeldt Royal Institute of Technology 2011-02-03 Introduction The load on the railway network increases steadily, and
A study of the performance and utilization of the Swedish railway network Anders Lindfeldt Royal Institute of Technology 2011-02-03 Introduction The load on the railway network increases steadily, and
Viktig information för transmittrar med option /A1 Gold-Plated Diaphragm
 Viktig information för transmittrar med option /A1 Gold-Plated Diaphragm Guldplätering kan aldrig helt stoppa genomträngningen av vätgas, men den får processen att gå långsammare. En tjock guldplätering
Viktig information för transmittrar med option /A1 Gold-Plated Diaphragm Guldplätering kan aldrig helt stoppa genomträngningen av vätgas, men den får processen att gå långsammare. En tjock guldplätering
Manual för BAMS. Svenska Bangolfförbundet
 Manual för BAMS Svenska Bangolfförbundet BAMS Resultatrapportering från mobila enheter Det är möjligt att rapportera resultat från mobila enheter till Bangolf Arena (BA). Man kan skapa ett fjärrgränssnitt
Manual för BAMS Svenska Bangolfförbundet BAMS Resultatrapportering från mobila enheter Det är möjligt att rapportera resultat från mobila enheter till Bangolf Arena (BA). Man kan skapa ett fjärrgränssnitt
Manual Sportident Onlinekontroll via GPRS
 Manual Sportident Onlinekontroll via GPRS 2012-07-10 Komponenter För att använda onlinekontroll över GPRS behövs dessa delar: GPRS låda (GPRS-modem med samlingsbox och batterier) Riktantenn med kabel (anslutes
Manual Sportident Onlinekontroll via GPRS 2012-07-10 Komponenter För att använda onlinekontroll över GPRS behövs dessa delar: GPRS låda (GPRS-modem med samlingsbox och batterier) Riktantenn med kabel (anslutes
Koordinatsystem och transformationer. Tina Kempe Lantmäteriet Informationsförsörjning geodesi tel. 026-63 38 56 christina.kempe@lm.
 Koordinatsystem och transformationer Tina Kempe Lantmäteriet Informationsförsörjning geodesi tel. 026-63 38 56 christina.kempe@lm.se Geodesi Vetenskapen om jordytans uppmätning och kartläggning (Helmert
Koordinatsystem och transformationer Tina Kempe Lantmäteriet Informationsförsörjning geodesi tel. 026-63 38 56 christina.kempe@lm.se Geodesi Vetenskapen om jordytans uppmätning och kartläggning (Helmert
Förtätning av nätverks-rtk i nordvästra Skåne
 STADSBYGGNADSFÖRVALTNINGEN STADSMILJÖ KART OCH MÄT Förtätning av nätverks-rtk i nordvästra Skåne 2017-11-10 Sida 1 Swepos nätverks-rtk referensstationer Nationellt nät av fasta referensstationer för GNSS
STADSBYGGNADSFÖRVALTNINGEN STADSMILJÖ KART OCH MÄT Förtätning av nätverks-rtk i nordvästra Skåne 2017-11-10 Sida 1 Swepos nätverks-rtk referensstationer Nationellt nät av fasta referensstationer för GNSS
Tags för 433 MHz är aktiva d.v.s. har ett inbyggt batteri, med 6-8 års livslängd vid normal aktivitet.
 RFID 433 MHz 433 MHz är en bra frekvens för RFID. Bra penetration genom många material och god räckvidd. Tekniken i taggarna är något mer avancerad än för övriga frekvenser vilket medför en högre kostnad
RFID 433 MHz 433 MHz är en bra frekvens för RFID. Bra penetration genom många material och god räckvidd. Tekniken i taggarna är något mer avancerad än för övriga frekvenser vilket medför en högre kostnad
Jämförelse av Epos och nätverks-dgps
 Jämförelse av Epos och nätverks-dgps Helena von Malmborg Examensarbete i Geodesi nr 392 TRITA-GIT EX 6-5 Skolan för Arkitektur och Samhällsbyggnad Kungliga Tekniska Högskolan (KTH) 1 44 Stockholm Mars
Jämförelse av Epos och nätverks-dgps Helena von Malmborg Examensarbete i Geodesi nr 392 TRITA-GIT EX 6-5 Skolan för Arkitektur och Samhällsbyggnad Kungliga Tekniska Högskolan (KTH) 1 44 Stockholm Mars
Aborter i Sverige 2008 januari juni
 HÄLSA OCH SJUKDOMAR 2008:9 Aborter i Sverige 2008 januari juni Preliminär sammanställning SVERIGES OFFICIELLA STATISTIK Statistik Hälsa och Sjukdomar Aborter i Sverige 2008 januari juni Preliminär sammanställning
HÄLSA OCH SJUKDOMAR 2008:9 Aborter i Sverige 2008 januari juni Preliminär sammanställning SVERIGES OFFICIELLA STATISTIK Statistik Hälsa och Sjukdomar Aborter i Sverige 2008 januari juni Preliminär sammanställning
Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl december, 2012.
 FÖRSÄTTSBLAD Institutionen för Naturgeografi och Ekosystemvetenskaper Institutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 21 december, 2012. Denna tentamen
FÖRSÄTTSBLAD Institutionen för Naturgeografi och Ekosystemvetenskaper Institutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 21 december, 2012. Denna tentamen
Geodetisk infrastruktur för projekt i Göteborgsområdet
 Geodetisk infrastruktur för projekt i Göteborgsområdet Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Dan Norin Lantmäteriet, dan.norin@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
Geodetisk infrastruktur för projekt i Göteborgsområdet Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Dan Norin Lantmäteriet, dan.norin@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
Den nya Nordiska landhöjningsmodellen
 Den nya Nordiska landhöjningsmodellen NKG2016LU Jonas Ågren Geodesienheten Lantmäteriet Jonas Ågren, MätKart17, Örebro, februari 2017 Introduktion I allt arbete med geodetiska referenssystem i Sverige
Den nya Nordiska landhöjningsmodellen NKG2016LU Jonas Ågren Geodesienheten Lantmäteriet Jonas Ågren, MätKart17, Örebro, februari 2017 Introduktion I allt arbete med geodetiska referenssystem i Sverige
 LMV -Rapport 27:8 Rapportserie: Geodesi och Geografiska informationssystem Jä mfö relse av distrib u tionskanaler fö r projektanpassad nä tverks-rtk Exam ensarbete av D aniel H alvardsson & Joakim Johansson
LMV -Rapport 27:8 Rapportserie: Geodesi och Geografiska informationssystem Jä mfö relse av distrib u tionskanaler fö r projektanpassad nä tverks-rtk Exam ensarbete av D aniel H alvardsson & Joakim Johansson
Wöhler CDL 210 CO2-logger
 Wöhler CDL 210 CO2-logger Allmänt Wöhler CDL 210 CO 2 mäter koldioxidhalten, luftfuktigheten och temperaturen. CDL kan logga och överföra mätdata online till PC. PC:n kan visa de loggade värdena som värden
Wöhler CDL 210 CO2-logger Allmänt Wöhler CDL 210 CO 2 mäter koldioxidhalten, luftfuktigheten och temperaturen. CDL kan logga och överföra mätdata online till PC. PC:n kan visa de loggade värdena som värden
Thinning the branches of the GNSS decision tree. Sten Bergstrand Per Jarlemark Jan Johansson
 Thinning the branches of the GNSS decision tree Sten Bergstrand Per Jarlemark Jan Johansson GPS MAC VRS NRTK PPP RTK DGPS Uncorr. DGPS Science Uncorr. Phase Phase Phase Code Code Business Pleasure Restr.
Thinning the branches of the GNSS decision tree Sten Bergstrand Per Jarlemark Jan Johansson GPS MAC VRS NRTK PPP RTK DGPS Uncorr. DGPS Science Uncorr. Phase Phase Phase Code Code Business Pleasure Restr.
Jämförelse av olika GNSS-mottagare
 Jämförelse av olika GNSS-mottagare Mätnoggrannhet i plan och höjd vid användande av nätverks-rtk Comparing GNSS Receivers Horizontal and Vertical Accuracy using Network RTK Andreas Larsson och Patrik Söder
Jämförelse av olika GNSS-mottagare Mätnoggrannhet i plan och höjd vid användande av nätverks-rtk Comparing GNSS Receivers Horizontal and Vertical Accuracy using Network RTK Andreas Larsson och Patrik Söder
Fjärruppkoppling med MRD-310 - Industriell 3G-Router KI00282A 2010-01
 Fjärruppkoppling med MRD-310 - Industriell 3G-Router KI00282A 2010-01 1 Funktion och användningsområde Med hjälp av 3G Routern MRD-310 finns möjlighet att via modem fjärransluta till ett Ethernetnätverk
Fjärruppkoppling med MRD-310 - Industriell 3G-Router KI00282A 2010-01 1 Funktion och användningsområde Med hjälp av 3G Routern MRD-310 finns möjlighet att via modem fjärransluta till ett Ethernetnätverk
Infobric AB CENTRALENHET. Användarmanual
 Infobric AB CENTRALENHET Användarmanual Innehåll 1. Översikt... 3 2. Menyhantering... 4 3. Konfigurations- och statusmeny... 5 3.1. Lösenord... 5 3.2. Struktur... 5 3.3. Diagnostics... 6 3.3.1. List devices...
Infobric AB CENTRALENHET Användarmanual Innehåll 1. Översikt... 3 2. Menyhantering... 4 3. Konfigurations- och statusmeny... 5 3.1. Lösenord... 5 3.2. Struktur... 5 3.3. Diagnostics... 6 3.3.1. List devices...
Industriell Datakommunikation. Allt du behöver veta om RS-232
 Industriell Datakommunikation Allt du behöver veta om RS-232 Email info@foxcomputer.se, Website http://www.foxcomputer.se Ulf Rääf Datakommunikation och Industriell IT enligt standard RS-232 Teori och
Industriell Datakommunikation Allt du behöver veta om RS-232 Email info@foxcomputer.se, Website http://www.foxcomputer.se Ulf Rääf Datakommunikation och Industriell IT enligt standard RS-232 Teori och
Realtidsuppdaterad fristation
 Precisionsanalys Januari 2009 Milan Horemuz Kungliga Tekniska högskolan, Institution för transporter och samhällsekonomi Avdelningen för Geodesi Teknikringen 72, SE 100 44 Stockholm e-post: horemuz@kth.se
Precisionsanalys Januari 2009 Milan Horemuz Kungliga Tekniska högskolan, Institution för transporter och samhällsekonomi Avdelningen för Geodesi Teknikringen 72, SE 100 44 Stockholm e-post: horemuz@kth.se
Instruktioner för Internetanslutning
 Nov 2003 Instruktioner för Internetanslutning På dessa sidor finner du instruktioner för att få din bredbandsanslutning att fungera. Du behöver inte använda några inloggningsuppgifter utan är hela tiden
Nov 2003 Instruktioner för Internetanslutning På dessa sidor finner du instruktioner för att få din bredbandsanslutning att fungera. Du behöver inte använda några inloggningsuppgifter utan är hela tiden
KOM IGÅNG MED DIVER-OFFICE
 KOM IGÅNG MED DIVER-OFFICE Innehåll KOM IGÅNG MED DIVER-OFFICE... 1 1. Ladda ner programmet och skapa ett nytt projekt... 2 2. Programmera och starta Diver... 2 3. Ladda hem data från Diver... 3 4. Barometerkompensation
KOM IGÅNG MED DIVER-OFFICE Innehåll KOM IGÅNG MED DIVER-OFFICE... 1 1. Ladda ner programmet och skapa ett nytt projekt... 2 2. Programmera och starta Diver... 2 3. Ladda hem data från Diver... 3 4. Barometerkompensation