Lego Robot [ ] [ ] [ ]
|
|
|
- Eva Gunnarsson
- för 7 år sedan
- Visningar:
Transkript

![[ ] [ ] [](/docs-images/91/107207567/images/1-1.jpg "]")
1 Lego Robot av [ ] [ ] [ ]
2 INNEHÅLLSFÖRTECKNING LABB1 (INFORMATION) # UPPGIFT 1 # UPPGIFT 2 # UPPGIFT 3 # LABB2 (OPERATÖRER) # UPPGIFT 1 # UPPGIFT 2 # UPPGIFT 3 # LABB3 (VARIABLER) # UPPGIFT 1 # UPPGIFT 2 # LABB4 (FÖRGRENING (IF-SAT)) # UPPGIFT 1 # UPPGIFT 2 # LABB5 (LOOP BLOCK) # UPPGIFT 1 # UPPGIFT 2 # LITEN CASE # LABORATION 1 # LABORATION 2 # 1
 för att koppla Sensors till EV3 Brick via indataportarna 1, 2, 3 och 4.")
 Port 2: Ingen sensor Port 3: Color Sensor (färgsensor) + Port 4: Infrared Sensor (IR-sensor) Om EV3 Brick är ansluten till en dator")

3 LABORATION 2 on1information Ansluta sensorer och motorer Motors (motorerna) och Sensors (sensorerna) fungerar bara när de är anslutna till EV3 Brick (EV3-enheten). Använd de platta, svarta Connector Cables (anslutningskablarna) för att koppla Sensors till EV3 Brick via indataportarna 1, 2, 3 och 4. Skapar du program när EV3 Brick inte är ansluten till en dator tilldelas Sensors standardportar, vilket sker automatiskt i EV3 Software (EV3- programvaran). Följande standardportar används: Port 1: Touch Sensor (trycksensor) Port 2: Ingen sensor Port 3: Color Sensor (färgsensor) + Port 4: Infrared Sensor (IR-sensor) Om EV3 Brick är ansluten till en dator medan du programmerar, identifieras varje sensors eller motors port automatiskt. Använd de platta, svarta anslutningskablarna för att koppla motorerna till EV3 Brick via utdataportarna A, B, C och D. Om EV3 Brick inte är ansluten till en dator medan du programmerar, tilldelas varje motor en standardport. Det sker automatiskt, precis som med sensorerna. Följande portar används: Port A: Medium Motor (medelstor motor) Port B och C: Två Large Motors (stora motorer) Port D: Large motor Om EV3 Brick är ansluten till en dator medan du programmerar, tilldelas rätt port automatiskt i programmet. 2


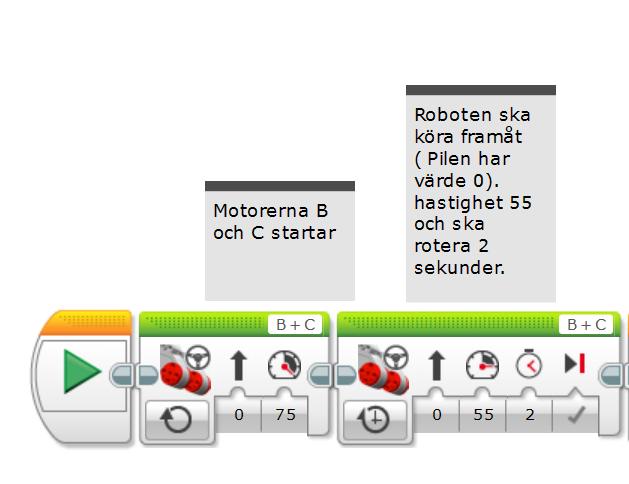
4 Positivt tal kör framåt Negativt tal kör bakåt. EXEMPEL: ROBOTPROGRAMMERING Din Lego roboten ska köra framåt och bakåt. Roboten ska köra först framåt. Sedan roboten ska svänga 180 grader och stanna. Hunden skäller 3


5 4
6 UPPGIFT 1 Skapa ett blockprogram med din Lego robot som kör runt i en fyrkant bana (se bilden). Din robot ska starta från en viss punkt och återvända i samma punkt. Din bana ska vara 75X20 cm. UPPGIFT 2 Skapa ett blockprogram med din Lego robot som kör runt i en triangelbana. Din robot ska starta från en viss punkt och återvända i samma punkt. Triangelsidorna ska vara olika. Du kan bestämma själva banasmåttet UPPGIFT 3 Skapa ett blockprogram med din Lego robot som kör runt i en bana. Sätt ett hinder var som hest på banan så att din Lego robot kör rund i det och fortsätter vidare till målet. Din robot ska starta från en viss punkt och återvända i samma punkt. Du kan bestämma själva banasmåttet och form. 5
7 LABORATION 2 Operatörer En operatör är en symbol som berättar för kompilatorn att utföra specifika matematiska eller logiska funktioner. Java script är rikt på inbyggda operatörer och tillhandahåller följande operatörer. Jämförelse Operatörer Antag att variabel A =6 och variabel B =12 då Operatörsnamn Operatör enkel Beskrivning exempel Lika med == Kontrollerar om värdet av två operander är lika eller inte, om ja då blir förhållandet sant. Mindre än < Kontrollerar om värdet av vänster operand är mindre än värdet på höger operand, om ja då blir förhållandet sant. Mer än > Kontrollerar om värdet på vänster operand är större än värdet på höger operand, om ja då blir förhållandet sant (A == B) är inte sant (A<B) är sant (A<B) är inte sant Mindre än eller lika med Mer än eller lika med <= Kontrollerar om värdet av vänster operand är mindre än eller lika med värdet på höger operand, om ja då blir förhållandet sant. >= Kontrollerar om värdet på vänster operand är större än eller lika med värdet på höger operand, om ja då blir förhållandet sant. (A<B) är sant (A<B) är inte sant Inte lika med!= Kontrollerar om värdet på två operander är lika eller inte, om värdena inte är lika då villkoret blir sant (A<B) är sant 6

 och väntar på")



8 Ultraljudssensorns Ultraljudssensorns avger högfrekventa ljudvågor (dessa vågor kan inte detekteras av mänskliga öron eftersom de är för höga) och väntar på att dessa ljudvågor återspeglar ett objekt och beräknar hur lång tid det tar för ljudet att återgå till sensorn. Sensorn jag använde kommer med sändnings- och mottagningsstiften märkta "trigger" respektive "echo". Dessa stift gör det mesta av arbetet för oss. 7


9 EXEMPEL: ROBOTPROGRAMMERING Använd ultraljudssensorns läge för att vänta på en ändring, för att upptäcka att ett objekt är nära. UPPGIFT 1 Skapa ett block program med din Lego robot som används ultraljudssensor för att upptäcka ett objekt. Roboten ska baka 10cm. Sedan vrider roboten 90 gradar och fortsatte sin resa. 8

10 UPPGIFT 2 Skapa ett blockprogram med din Lego robot som används ultraljudssensor för att upptäcka att ett objekt och kör runt kring det. UPPGIFT 3 Skapa ett blockprogram med din Lego robot som används ultraljudssensor för att upptäcka att ett objekt och han passerar objekt från höger och tillbaka till samma linje. 9




11 LABORATION 3 Variabler Inom programmering är en variabel ett namngivet objekt som har och kan ändra värde. Det finns flera olika typer av variabler som används i olika sammanhang. Så en variabel ses kanske enklast som en låda, med en etikett på. På etiketten står det ett namn och i lådan ligger det något. Med hjälp av variabler k2an din Lego-robot lagra nummer eller text baserat på inmatning. Färgsensor Den digitala EV3-färgsensorn skiljer mellan sju olika färger och kan också upptäcka frånvaron av färg. Blocket Färgsensor hämtar data från färgsensorn. Du kan mäta färgen eller intensiteten i belysning och få ett numeriskt utvärde. Du kan också jämföra sensordata med ett indatavärde och få ett logiskt (sant eller falskt) utvärde. Det fungerar också som en ljussensor genom att detektera ljusintensiteter. Studenter kan bygga färgsortering och radföljande robotar. 10


12 Enhetsdisplay Använd lego robot enhetens display för att visa bilder och text eller värde från roboten sensor på skärmen. 11

13 EXEMPEL: ROBOTPROGRAMMERING Skapa en kod för att göra lego robot läs färg med färgsensor och kontrollera om dess vita färg så att roboten kommer att spela ljud. 12


14 UPPGIFT 1 Skapa ett blockprogram med din Lego-robot som kör rakt och stoppa direkt när färgsensorn hittar en svart linje och visa färg på skärmen. UPPGIFT 2 Skapa ett blockprogram med din Lego-robot som undersöker bordsskivan, stå och kör bak när du når bordets kant och byter riktning. 13

15 LABORATION 4 Förgrening (IF satsen) Blocket Förgrening är en behållare som kan innehålla två eller flera sekvenser av programmeringsblock. Varje sekvens kallas för ett fall. Ett test i början av förgreningen styr vilket fall som ska köras. Bara ett fall åt gången körs varje gång förgreningen körs. Förgreningstestet som visas här kan avgöra vilket fall som ska köras baserat på ett sensordatavärde eller ett värde från en dataledning. När ett fall har valts och körts fortsätter programmet med eventuella block som följer efter förgreningen. If satsen är en konstruktion som du kan använda för att styra vad som ska göras i ditt program. Nästan alla program reagerar olika beroende på vad du matar in i dem. Med följande bild ska vi använda block som kontroll av avstånd mellan något objekt och roboten om det är mindre an 50CM (det är sant) roboten ska kör B motor och stop C motor, också om avstånd är mer an 50CM (det är falsk) roboten ska kör C motor och stop B motor. 14


16 Trycksensor Trycksensorn detekterar om knappen på sensorns framsida är intryckt. Med trycksensorn kan du till exempel detektera om roboten kör in i något. Du kan också utlösa en händelse genom att själv trycka på sensorns knapp. Trycksensorn kan indikera om den är intryckt eller inte. Däremot kan den inte mäta hur länge knappen hålls ner eller hur hårt den trycks in. Trycksensorn genererar logiska data, dvs. värdet Sant eller värdet Falskt. Trycksensorknappens position är densamma som dess status. Om knappen är intryckt är statusen Sant. Är knappen uppsläppt är statusen Falskt. EXEMPEL MED INTRYCKT Trycksensorn genererar följande data: 15
, och texten Thumbs up (tummen upp) visas på roboten samtidigt som den säger Yes (ja).")
17 EXEMPEL: ROBOTPROGRAMMERING Programmet nedan får en robot att säga Touch (tryck). Sedan testar det om trycksensorn är intryckt. Om så är fallet körs Sant-fallet (överst), och texten Thumbs up (tummen upp) visas på roboten samtidigt som den säger Yes (ja). Om trycksensorn inte är intryckt körs Falskt-fallet (längst ned), och texten Thumbs down (tummen ned) visas på roboten samtidigt som den säger No (nej). Efter förgreningen säger roboten Thank you (tack). Trycksensorn testas så fort roboten har sagt Touch (tryck). Om sensorn hålls nedtryckt i det ögonblicket kör förgreningen Sant-fallet. Annars kör den Falskt-fallet. 16


18 UPPGIFT 1 Skapa ett blockprogram med din Lego robot som spelar ett visst ljud när du trycker på trycksensor. UPPGIFT 2 Skapa ett blockprogram med din Lego robot som kör framåt tills den koliderar med ett objekt t ex väggen. Trycksensoren trycks ner så att roboten kör bakåt och stannar. 17



19 LABORATION 5 Loop-block Loop-blocket är en behållare som kan innehålla en sekvens av programmeringsblock. Det får blocksekvensen som ingår att upprepas. Du kan välja om blocken ska upprepas i oändlighet, ett visst antal gånger, tills ett sensortest utförs eller tills något annat villkor är Sant. Det är bara blocken inuti loopen som upprepas. När loopen är slut fortsätter programmet med de block som följer efter loopen. Använd lägesväljaren om du vill styra hur loopen ska upprepas. De olika lägena anger vilket villkor som ska avbryta loopen. Du kan till exempel få loopen att upprepas ett visst antal gånger, att upprepas tills ett datavärde från sensorn når ett visst tröskelvärde eller att upprepas i oändlighet. Vilka indata som är tillgängliga beror på vilket läge som har valts. Lägena beskrivs nedan. Exempel: Med det här programmet körs en robot framåt tills trycksensorn trycks in eller tills färgsensorn detekterar svart (beroende på vad som inträffar först). Utdatavärdet från ett block av typen Logiska operationer används för indatavärdet Tills i loopen. När loopen är slut stoppas roboten. 18


20 OBS: nästa bild förklara hur logikporten fungerar. Gyrosensorn Gyrosensorn identifierar rotationsrörelser. Om du roterar gyrosensorn i samma riktning som pilarna på sensorns hölje, kan sensorn identifiera rotationsfrekvensen i grader per sekund. Du kan använda rotationsfrekvensen för att identifiera till exempel när en del av roboten roterar eller när roboten faller omkull. Gyrosensorn registrerar dessutom den totala rotationsvinkeln i grader. Du kan använda rotationsvinkeln om du till exempel vill ta reda på hur långt roboten har roterat. Gyrosensorn kan generera följande data: EXEMPEL: SVÄNG MED EN SPECIFIK VINKEL Med det här programmet svänger en robot 90 grader åt vänster. Programmet använder blocket Vänta med läget Gyrosensor Ändra Vinkel för att vänta tills rotationsvinkeln ändrats med 90 grader. 19
.")

21 UPPGIFT 1 Skapa ett blockprogram med din Lego-robot spelar ett visst ljud när roboten rotera 90 grader. (Använd gyrosensorn för att mäta rotationsrörelser). UPPGIFT 2 Skapa ett blockprogram med din Lego-robot som kör runt och rotera när det kom nära väggen och var noga med att roboten spelar ljud när han roterar 20

22 LITEN CASE LABORATION 1 Två grupper ska tävla mot varandra samtidigt, Ni Skapar en blockprogrammering med din lego robot som ska köra så snabbt så möjligt inne i en cirkelbana utan att den lämna ut cirkeln. Roboten som lämnar ut först cirkelbana förlorad. Tips: 1- Använd färgsensor. 2- Skapa två loopar. 21

23 LABORATION 2 Två grupper ska tävla mot varandra samtidigt, Skapa ett blockprogram med din Lego-robot som följa en svart linje. Tips: 1- Använd färgsensor. 2- Skapa variabler. 3- Skapa loopar. 22
24 LITTERATURFÖRTECKNING Manual 1: Manuel 2: 23
Roboten. Sida 1 av 11
 EV3 ipad Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
EV3 ipad Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
EV3 Roboten. Sida 1 av 13
 EV3 Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
EV3 Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
Legorobot. Lär dig programmera en legorobot. Teknikåttan 2009. Ola Ringdahl Lena Kallin Westin
 Legorobot Lär dig programmera en legorobot. Teknikåttan 2009 Ola Ringdahl Lena Kallin Westin Legorobot Sid 2 (6) Legorobot Sid 3 (6) LEGOROBOT Syfte Syftet med denna praktiska uppgift är att man ska få
Legorobot Lär dig programmera en legorobot. Teknikåttan 2009 Ola Ringdahl Lena Kallin Westin Legorobot Sid 2 (6) Legorobot Sid 3 (6) LEGOROBOT Syfte Syftet med denna praktiska uppgift är att man ska få
3 augusti (G) Programmering: Lego
 Programmering: Lego") 3 augusti (G) Programmering: Lego Idag ska vi gå igenom vad en robot är, hur programmeringsmiljön ser ut och skriva våra första program. Vi kommer gå igenom flera gröna programmeringsblock, samt det orangea
3 augusti (G) Programmering: Lego Idag ska vi gå igenom vad en robot är, hur programmeringsmiljön ser ut och skriva våra första program. Vi kommer gå igenom flera gröna programmeringsblock, samt det orangea
Sphero SPRK+ Appen som används är Sphero Edu. När appen öppnas kommer man till denna bild.
 Sphero SPRK+ Appen som används är Sphero Edu När appen öppnas kommer man till denna bild. Klicka på 3D-modeller för att se delarna på Sphero Klicka här för att ansluta Sphero till ipad Programmet för att
Sphero SPRK+ Appen som används är Sphero Edu När appen öppnas kommer man till denna bild. Klicka på 3D-modeller för att se delarna på Sphero Klicka här för att ansluta Sphero till ipad Programmet för att
Laborationer i SME094 Informationsteknologi I för
 Laborationer i SME094 Informationsteknologi I för basår Programmering av LEGO Mindstorms med ROBOLAB Johan Carlson Luleå tekniska universitet Inst. för Systemteknik EISLAB Email: [email protected] 25 mars
Laborationer i SME094 Informationsteknologi I för basår Programmering av LEGO Mindstorms med ROBOLAB Johan Carlson Luleå tekniska universitet Inst. för Systemteknik EISLAB Email: [email protected] 25 mars
4 augusti (G) Programmering: Lego
 Programmering: Lego") 4 augusti (G) Programmering: Lego Idag ska vi gå igenom loopar, valblock (switchar), parallella program program. Robotar upprepar ofta samma sak om och om igen. T.ex. en industrirobot som ska tillvecka
4 augusti (G) Programmering: Lego Idag ska vi gå igenom loopar, valblock (switchar), parallella program program. Robotar upprepar ofta samma sak om och om igen. T.ex. en industrirobot som ska tillvecka
INNEHÅLLSFÖRTECKNING... 2 FÖRORD... 3 INLEDNING... 4 ATT ANVÄNDA MOTORERNA... 9 LOOP (UPPREPANDE) FUNKTIONEN... 10 SKAPA EN EGEN KLOSS...
 FUNKTIONEN... 10 SKAPA EN EGEN KLOSS...") GRUNDKURS INNEHÅLLSFÖRTECKNING INNEHÅLLSFÖRTECKNING... 2 FÖRORD... 3 INLEDNING... 4 SKÄRMUPPBYGGNAD... 4 ROBOT EDUCATOR... 5 PROGRAMMERINGSRUTAN... 5 KNAPPARNA OCH KLOSSARNA... 6 UPPGIFTER... 8 ATT ANVÄNDA
GRUNDKURS INNEHÅLLSFÖRTECKNING INNEHÅLLSFÖRTECKNING... 2 FÖRORD... 3 INLEDNING... 4 SKÄRMUPPBYGGNAD... 4 ROBOT EDUCATOR... 5 PROGRAMMERINGSRUTAN... 5 KNAPPARNA OCH KLOSSARNA... 6 UPPGIFTER... 8 ATT ANVÄNDA
Om NXTprogrammering. Vad är MINDSTORMS NXT? Vad är MINDSTORMS NXT? Vad är MINDSTORMS NXT? Vad är MINDSTORMS NXT? Vad är MINDSTORMS NXT?
 Om NXTprogrammering RCX-modul (Robotic Commander explorer) Styrenhet som innehåller liten dator Vad innehåller lådan? Liten dator, sensorer, motorer, hjul Massor av legobitar RCX-modulen Skärm Gå vänster
Om NXTprogrammering RCX-modul (Robotic Commander explorer) Styrenhet som innehåller liten dator Vad innehåller lådan? Liten dator, sensorer, motorer, hjul Massor av legobitar RCX-modulen Skärm Gå vänster
Strukturerad problemlösning. Metoder och verktyg för datavetare Ht09
 Strukturerad problemlösning Metoder och verktyg för datavetare Ht09 Syfte Syftet med uppgiften är att få kännedom om ett strukturerat arbetssätt för hur ett problem kan angripas i de olika steg som svarar
Strukturerad problemlösning Metoder och verktyg för datavetare Ht09 Syfte Syftet med uppgiften är att få kännedom om ett strukturerat arbetssätt för hur ett problem kan angripas i de olika steg som svarar
Blockly är en av apparna som används för att styra roboten Dash. Den är väldigt enkel i sin utformning och kan med fördel användas av yngre barn.
 Manual till appen Blockly till Dash Blockly är en av apparna som används för att styra roboten Dash. Den är väldigt enkel i sin utformning och kan med fördel användas av yngre barn. Du måste ha en Dashrobot
Manual till appen Blockly till Dash Blockly är en av apparna som används för att styra roboten Dash. Den är väldigt enkel i sin utformning och kan med fördel användas av yngre barn. Du måste ha en Dashrobot
Robot Educator En introduktion
 Robot Educator En introduktion LEGO Education har nöjet att presentera Robot Educator en serie handledningar som presenterar ett strukturerat och trevligt sätt att lära känna LEGO MINDSTORMS Education
Robot Educator En introduktion LEGO Education har nöjet att presentera Robot Educator en serie handledningar som presenterar ett strukturerat och trevligt sätt att lära känna LEGO MINDSTORMS Education
Vilken skillnad gör det var du placerar det? Prova båda.
 Micro:bit- Namnskylt Vi börjar med att döpa programmet till något. Till exempel ditt namn. Det gör du längst ner i mitten. Nu ska vi göra ett enkelt program som med lysdioderna skriver ditt namn. När du
Micro:bit- Namnskylt Vi börjar med att döpa programmet till något. Till exempel ditt namn. Det gör du längst ner i mitten. Nu ska vi göra ett enkelt program som med lysdioderna skriver ditt namn. När du
Edison roboten som går at bygga ihop med LEGO
 Edison är en streckkodsläsande robot som på ett engagerande och roligt sätt lär ut elektronik och programmering. Edison har alla sensorer, utgångar och motorer som behövs för göra robotprogrammering riktigt
Edison är en streckkodsläsande robot som på ett engagerande och roligt sätt lär ut elektronik och programmering. Edison har alla sensorer, utgångar och motorer som behövs för göra robotprogrammering riktigt
Programmering eller Datalogiskt tänkande
 Programmering eller Datalogiskt tänkande I förskolan handlar programmering om att få en begynnande förståelse vad det kan innebära. Barnen ges ett kreativt utrymme och har möjlighet att forma sin egen
Programmering eller Datalogiskt tänkande I förskolan handlar programmering om att få en begynnande förståelse vad det kan innebära. Barnen ges ett kreativt utrymme och har möjlighet att forma sin egen
Programmering av en Lego robot
 KUNGLIGA TEKNISKA HÖSKOLAN Programmering av en Lego robot - En laboration i kodning i språket NXC Felix Thim 2012-09-06 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning Denna rapport handlar
KUNGLIGA TEKNISKA HÖSKOLAN Programmering av en Lego robot - En laboration i kodning i språket NXC Felix Thim 2012-09-06 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning Denna rapport handlar
Lär känna Edison. Det här är Edison, den programmeringsbara roboten.
 Edison och EdBlocks Övning 1 Programmerarens namn Lär känna Edison Det här är Edison, den programmeringsbara roboten. Vad är en robot? En robot är en maskin som man kan få att utföra saker på egen hand.
Edison och EdBlocks Övning 1 Programmerarens namn Lär känna Edison Det här är Edison, den programmeringsbara roboten. Vad är en robot? En robot är en maskin som man kan få att utföra saker på egen hand.
Robotfotboll med Arduino
 Robotfotboll med Arduino Av Staffan Melin och Martin Blom Bild & form-skolan, Masthugget, Göteborg 2015 Staffan Melin, [email protected] Martin Blom, [email protected] Detta verk är
Robotfotboll med Arduino Av Staffan Melin och Martin Blom Bild & form-skolan, Masthugget, Göteborg 2015 Staffan Melin, [email protected] Martin Blom, [email protected] Detta verk är
INNEHÅLLSFÖRTECKNING... 2 FÖRORD... 3 ANVÄNDANDET AV SENSORER... 4
 GRUNDKURS INNEHÅLLSFÖRTECKNING INNEHÅLLSFÖRTECKNING... 2 FÖRORD... 3 ANVÄNDANDET AV SENSORER... 4 INTRODUKTION... 4 UPPGIFT 1 : ANVÄNDA MOTORER... 4 NÄR ANVÄNDER DU EN MOTOR?... 4 HUR MAN ANVÄNDER EN LEGO
GRUNDKURS INNEHÅLLSFÖRTECKNING INNEHÅLLSFÖRTECKNING... 2 FÖRORD... 3 ANVÄNDANDET AV SENSORER... 4 INTRODUKTION... 4 UPPGIFT 1 : ANVÄNDA MOTORER... 4 NÄR ANVÄNDER DU EN MOTOR?... 4 HUR MAN ANVÄNDER EN LEGO
LEGO Robot programmering och felsökning Hur svårt ska det vara att följa den svarta linjen?
 ICT LEGO Robot programmering och felsökning Hur svårt ska det vara att följa den svarta linjen? Daniel Lindfors 12/9/07 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning Denna laboration
ICT LEGO Robot programmering och felsökning Hur svårt ska det vara att följa den svarta linjen? Daniel Lindfors 12/9/07 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning Denna laboration
Programmering robotprogrammering med mbot
 Programmering 4-6 -robotprogrammering med mbot Lärarhandledning till Robotprogrammering med mbot 2 o o o o o o o Innehåll Vad är en mbot?... s4 De olika delarna på en mbot.... s5 Blockprogrammering.. s9
Programmering 4-6 -robotprogrammering med mbot Lärarhandledning till Robotprogrammering med mbot 2 o o o o o o o Innehåll Vad är en mbot?... s4 De olika delarna på en mbot.... s5 Blockprogrammering.. s9
LEGO MINDSTORMS Education EV3
 LEGO MINDSTORMS Education EV3 Framtiden tillhör de kreativa πr ROBOTAR OCH IT KREATIVITET SAMARBETE PROBLEMLÖSNING EV3 en evolution av MINDSTORMS Education! LEGO MINDSTORMS Education har bevisat att det
LEGO MINDSTORMS Education EV3 Framtiden tillhör de kreativa πr ROBOTAR OCH IT KREATIVITET SAMARBETE PROBLEMLÖSNING EV3 en evolution av MINDSTORMS Education! LEGO MINDSTORMS Education har bevisat att det
Möt Edison. Detta är Edison, den programmerbara roboten. Vad är en robot? En robot är en maskin som man kan få att göra en uppgift på egen hand.
 Edison och EdBlocks Aktivitet 1 Programmerarens namn Möt Edison Detta är Edison, den programmerbara roboten. Vad är en robot? En robot är en maskin som man kan få att göra en uppgift på egen hand. Det
Edison och EdBlocks Aktivitet 1 Programmerarens namn Möt Edison Detta är Edison, den programmerbara roboten. Vad är en robot? En robot är en maskin som man kan få att göra en uppgift på egen hand. Det
Konstruera, styra, reglera och programmera en röd tråd F-9
 Konstruera, styra, reglera och programmera en röd tråd F-9 Icke vinstdrivande grundskola F-9, grundad 1914. LGR-11 rev 2017 Centralt innehåll Årskurs 1-3 Teknik Arbetssätt för utveckling av tekniska lösningar
Konstruera, styra, reglera och programmera en röd tråd F-9 Icke vinstdrivande grundskola F-9, grundad 1914. LGR-11 rev 2017 Centralt innehåll Årskurs 1-3 Teknik Arbetssätt för utveckling av tekniska lösningar
Lär dig programmera! Prova på programmering med enkla exempel! Björn Regnell www.bjornregnell.se
 Lär dig programmera! Prova på programmering med enkla exempel! Björn Regnell www.bjornregnell.se Mål Så enkelt som möjligt: låg tröskel Ett riktigt programmeringsspråk: inget tak Roliga uppgifter som går
Lär dig programmera! Prova på programmering med enkla exempel! Björn Regnell www.bjornregnell.se Mål Så enkelt som möjligt: låg tröskel Ett riktigt programmeringsspråk: inget tak Roliga uppgifter som går
Programmering. Scratch - grundövningar
 Programmering Scratch - grundövningar Lär känna programmet: Menyer för att växla mellan att arbeta med script, utseende/bakgrund och ljud. Scenen där allting utspelar sig. Här klickar du på bakgrunden
Programmering Scratch - grundövningar Lär känna programmet: Menyer för att växla mellan att arbeta med script, utseende/bakgrund och ljud. Scenen där allting utspelar sig. Här klickar du på bakgrunden
Komponentvisa operationer,.-notation Multiplikation (*), division (/) och upphöj till (ˆ) av vektorer följer vanliga vektoralgebraiska
, division (/) och upphöj till (ˆ) av vektorer följer vanliga vektoralgebraiska") Matlab-föreläsning 3 (4), 17 september, 2015 Innehåll Sekvenser (från förra föreläsningen) Upprepning med for-slingor och while-slingor Villkorssatser med if - then -else - Logik Sekvenser - repetion från
Matlab-föreläsning 3 (4), 17 september, 2015 Innehåll Sekvenser (från förra föreläsningen) Upprepning med for-slingor och while-slingor Villkorssatser med if - then -else - Logik Sekvenser - repetion från
Sirius II Installation och Bruksanvisning
 Sirius II Installation och Bruksanvisning Innehåll 1. Introduktion... 2. Installation av Sirius II programvara... 3. Anslutning Data Linker interface.... 4. Sirius II funktioner.... 5. Bruksanvisning....
Sirius II Installation och Bruksanvisning Innehåll 1. Introduktion... 2. Installation av Sirius II programvara... 3. Anslutning Data Linker interface.... 4. Sirius II funktioner.... 5. Bruksanvisning....
Dagens robot. Copyright Sagitta Pedagog AB
 Dagens robot RaceBot är utrustad med lysdioder och två motorer med var sitt hjul. Här lär du dig att programmera den så att den går framåt, bakåt eller svänger. Kanske kan du få den att köra i ett L eller
Dagens robot RaceBot är utrustad med lysdioder och två motorer med var sitt hjul. Här lär du dig att programmera den så att den går framåt, bakåt eller svänger. Kanske kan du få den att köra i ett L eller
Hur ser Blue-Bot ut i aktion?
 Hur ser Blue-Bot ut i aktion? Tydliga knappar för barnen att använda vid programmering av Blue-Bot. Möjlighet att spara upp till 80 instruktioner i Blue- Bots minne. Blue-Bot rör sig i samma riktning 15
Hur ser Blue-Bot ut i aktion? Tydliga knappar för barnen att använda vid programmering av Blue-Bot. Möjlighet att spara upp till 80 instruktioner i Blue- Bots minne. Blue-Bot rör sig i samma riktning 15
Programmering med NXC Lego Mindstorm
 KUNGLIGA TEKNISKA HÖGSKOLAN Programmering med NXC Lego Mindstorm INTRODUKTIONSKURS I DATATEKNIK (II1310), LABB [email protected] Kasper Wikman 2013-08-27 Sammanfattning: Många har sedan lång tid tillbaka varit
KUNGLIGA TEKNISKA HÖGSKOLAN Programmering med NXC Lego Mindstorm INTRODUKTIONSKURS I DATATEKNIK (II1310), LABB [email protected] Kasper Wikman 2013-08-27 Sammanfattning: Många har sedan lång tid tillbaka varit
Programmering av LEGO NXT robot Laborationsrapport för programering av robot för att följa svartmarkerad linje på maken
 KUNGLIGA TEKNISKA HÖGSKOLAN Programmering av LEGO NXT robot Laborationsrapport för programering av robot för att följa svartmarkerad linje på maken Hannes Rabo 2015-08-30 [email protected] Introduktionskurs
KUNGLIGA TEKNISKA HÖGSKOLAN Programmering av LEGO NXT robot Laborationsrapport för programering av robot för att följa svartmarkerad linje på maken Hannes Rabo 2015-08-30 [email protected] Introduktionskurs
3. Välj den sprajt (bild) ni vill ha som fallande objekt, t ex en tårta, Cake. Klicka därefter på OK.
 ni vill ha som fallande objekt, t ex en tårta, Cake. Klicka därefter på OK.") Moment 2: Klonspel Instruktioner för deltagare Idag ska du få lära dig om: Kloner - kopior av samma figur (sprajt) Variabler - ett värde, exempelvis antal poäng Slumptal - slå en tärning för att välja
Moment 2: Klonspel Instruktioner för deltagare Idag ska du få lära dig om: Kloner - kopior av samma figur (sprajt) Variabler - ett värde, exempelvis antal poäng Slumptal - slå en tärning för att välja
Lektion 1 Arbetsblad 1.1 Möt Edison
 Lektion 1 Arbetsblad 1.1 Möt Edison Edison är en liten LEGOanpassad och programmerbar robot. Edison kan kommunicera med omvärlden med hjälp av sina sensorer. I bilden finns Edisons sensorer, knappar och
Lektion 1 Arbetsblad 1.1 Möt Edison Edison är en liten LEGOanpassad och programmerbar robot. Edison kan kommunicera med omvärlden med hjälp av sina sensorer. I bilden finns Edisons sensorer, knappar och
Laborationsrapport av robotprogrammering
 KUNGLIGA TEKNISKA HÖGSKOLAN Laborationsrapport av robotprogrammering Programmering av LEGO MINDSTORMS robot Rikard Bjärlind 2012-09-07 E-post: [email protected] Introduktionskurs i datateknik (H12) II1310
KUNGLIGA TEKNISKA HÖGSKOLAN Laborationsrapport av robotprogrammering Programmering av LEGO MINDSTORMS robot Rikard Bjärlind 2012-09-07 E-post: [email protected] Introduktionskurs i datateknik (H12) II1310
KUNGLIGA TEKNISKA HÖGSKOLAN. Linefollower. Med LEGO Mindstorms och NXC. Paul Coada 2012-08-29 [email protected] Introduktion i datateknik II1310
 KUNGLIGA TEKNISKA HÖGSKOLAN Linefollower Med LEGO Mindstorms och NXC Paul Coada 2012-08-29 [email protected] Introduktion i datateknik II1310 Sammanfattning Rapporten är för labbmomentet som utförs i introduktionskursen
KUNGLIGA TEKNISKA HÖGSKOLAN Linefollower Med LEGO Mindstorms och NXC Paul Coada 2012-08-29 [email protected] Introduktion i datateknik II1310 Sammanfattning Rapporten är för labbmomentet som utförs i introduktionskursen
Labb i Datorsystemteknik och programvaruteknik Programmering av kalkylator i Visual Basic
 Labb i Datorsystemteknik och programvaruteknik Programmering av kalkylator i Visual Basic Inledning Starta Microsoft Visual Studio 2005. Välj create Project Välj VB + Vindows Application och välj ett nytt
Labb i Datorsystemteknik och programvaruteknik Programmering av kalkylator i Visual Basic Inledning Starta Microsoft Visual Studio 2005. Välj create Project Välj VB + Vindows Application och välj ett nytt
Micro:bit och servomotorer
 Micro:bit och servomotorer Servomotorer som beskrivs här är så kallade micro servos och har beteckningarna: FS90 FS90R En servomotor har tre kablar. En brun som kopplas till GND, en röd som är för strömförsörjning
Micro:bit och servomotorer Servomotorer som beskrivs här är så kallade micro servos och har beteckningarna: FS90 FS90R En servomotor har tre kablar. En brun som kopplas till GND, en röd som är för strömförsörjning
AVR 5. Styrning av trafikljus. Digitala system 15 p
 Namn: Laborationen godkänd: Digitala system 15 p AVR 5 LTH Ingenjörshögskolan vid Campus Helsingborg Styrning av trafikljus. Syftet med laborationen är att styra en trafikkorsning med hjälp av en mikroprocessor.
Namn: Laborationen godkänd: Digitala system 15 p AVR 5 LTH Ingenjörshögskolan vid Campus Helsingborg Styrning av trafikljus. Syftet med laborationen är att styra en trafikkorsning med hjälp av en mikroprocessor.
Instruktion Basketboll
 Page: 1 of 9 Instruktion för resultattavla multisport och Basic LED- och elektromekaniska versioner Page: 2 of 9 Innehållsförteckning Instruktion... 1 Installation... 3 Detta bör du veta... 3 Display-översikt...
Page: 1 of 9 Instruktion för resultattavla multisport och Basic LED- och elektromekaniska versioner Page: 2 of 9 Innehållsförteckning Instruktion... 1 Installation... 3 Detta bör du veta... 3 Display-översikt...
Felsökande av en Lego Mindstorm robot
 KTH Felsökande av en Lego Mindstorm robot Med hjälp av NXC Hampus Liljedahl 3/9-12 [email protected] Introduction to Computer Studies II1310 Sammanfattning Jag har gjort en labb där jag felsökte en färdigskriven
KTH Felsökande av en Lego Mindstorm robot Med hjälp av NXC Hampus Liljedahl 3/9-12 [email protected] Introduction to Computer Studies II1310 Sammanfattning Jag har gjort en labb där jag felsökte en färdigskriven
Datorteknik 2 (AVR 2)
") Namn: Laborationen godkänd: Digitala system 15 hp Datorteknik 2 (AVR 2) LTH Ingenjörshögskolan vid Campus Helsingborg Enkel in- och utmatning. Drivrutiner. Bithantering. I denna laboration ska vi förbättra
Namn: Laborationen godkänd: Digitala system 15 hp Datorteknik 2 (AVR 2) LTH Ingenjörshögskolan vid Campus Helsingborg Enkel in- och utmatning. Drivrutiner. Bithantering. I denna laboration ska vi förbättra
Programmering i C++ En manual för kursen Datavetenskaplig introduktionskurs 5p
 Programmering i C++ En manual för kursen Datavetenskaplig introduktionskurs 5p Skriven av Michael Andersson Introduktion Programmering I högnivåspråk fokuserar på själv problemet (algoritmen) istället
Programmering i C++ En manual för kursen Datavetenskaplig introduktionskurs 5p Skriven av Michael Andersson Introduktion Programmering I högnivåspråk fokuserar på själv problemet (algoritmen) istället
KUNGLIGA TEKNISKA HÖGSKOLAN KISTA. Lego Linefollower. Få en robot att följa linjen på golvet!
 KUNGLIGA TEKNISKA HÖGSKOLAN KISTA Lego Linefollower Få en robot att följa linjen på golvet! Felix Ringberg 2012-08-09 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning I den här laborationen
KUNGLIGA TEKNISKA HÖGSKOLAN KISTA Lego Linefollower Få en robot att följa linjen på golvet! Felix Ringberg 2012-08-09 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning I den här laborationen
PROGRAMMERING I NXC. Sammanfattning KUNGLIGA TEKNISKA HÖGSKOLAN
 KUNGLIGA TEKNISKA HÖGSKOLAN PROGRAMMERING I NXC Namn: Michel Bitar 2012-08- 25 E- post: [email protected] Introduktionskurs i datateknik, II1310 Sammanfattning Intressant och lärorik laboration om att programmera
KUNGLIGA TEKNISKA HÖGSKOLAN PROGRAMMERING I NXC Namn: Michel Bitar 2012-08- 25 E- post: [email protected] Introduktionskurs i datateknik, II1310 Sammanfattning Intressant och lärorik laboration om att programmera
LPP Programmering. Syfte, övergripande mål Lära känna och kunna utföra enkla programmeringar i Scratch samt Lego Mindstorms.
 LPP Programmering Syfte, övergripande mål Lära känna och kunna utföra enkla programmeringar i Scratch samt Lego Mindstorms. Koppling till styrdokumenten I förslaget till förändring av läroplanen för grundskolan
LPP Programmering Syfte, övergripande mål Lära känna och kunna utföra enkla programmeringar i Scratch samt Lego Mindstorms. Koppling till styrdokumenten I förslaget till förändring av läroplanen för grundskolan
NXT LEGO-robot laboration Programmering och felsökning av en LEGOrobot
 KUNGLIGA TEKNISKA HÖGSKOLAN NXT LEGO-robot laboration Programmering och felsökning av en LEGOrobot Gabriel Vilén 30/8-2012 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning Vi har programmerat
KUNGLIGA TEKNISKA HÖGSKOLAN NXT LEGO-robot laboration Programmering och felsökning av en LEGOrobot Gabriel Vilén 30/8-2012 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning Vi har programmerat
Att göra spel med Game Maker. Rum. Grundläggande delar. Gamemaker, dagens föreläsning. Programmeringsmodell
 Gamemaker, dagens föreläsning Vad innehåller Gamemaker? Rum Objekt Händelser Aktioner Sprites Ljud Variabler och uttryck Live exempel: Början på Pac Man Att göra spel med Game Maker Programmeringsmodell
Gamemaker, dagens föreläsning Vad innehåller Gamemaker? Rum Objekt Händelser Aktioner Sprites Ljud Variabler och uttryck Live exempel: Början på Pac Man Att göra spel med Game Maker Programmeringsmodell
Programmering av NXT Lego- robot Labbrapport för programmering av en Lego- robot
 KUNGLIGA TEKNISKA HÖGSKOLAN Programmering av NXT Lego- robot Labbrapport för programmering av en Lego- robot Josef Karlsson Malik 2015-09- 02 [email protected] Introduktionskurs i datateknik (II0310) Sammanfattning
KUNGLIGA TEKNISKA HÖGSKOLAN Programmering av NXT Lego- robot Labbrapport för programmering av en Lego- robot Josef Karlsson Malik 2015-09- 02 [email protected] Introduktionskurs i datateknik (II0310) Sammanfattning
TDIU01 - Programmering i C++, grundkurs
 TDIU01 - Programmering i C++, grundkurs Grundläggande satser och uttryck Eric Elfving Institutionen för datavetenskap 5 augusti 2014 Översikt Uttryck Litteraler Operatorer Satser Villkor Upprepning Teckenhantering
TDIU01 - Programmering i C++, grundkurs Grundläggande satser och uttryck Eric Elfving Institutionen för datavetenskap 5 augusti 2014 Översikt Uttryck Litteraler Operatorer Satser Villkor Upprepning Teckenhantering
Klassdeklaration. Metoddeklaration. Parameteröverföring
 Syntax: Class Declaration Modifier Class Body Basic Class Member Klassdeklaration class Class Member Field Declaration Constructor Declaration Method Declaration Identifier Class Associations Motsvarar
Syntax: Class Declaration Modifier Class Body Basic Class Member Klassdeklaration class Class Member Field Declaration Constructor Declaration Method Declaration Identifier Class Associations Motsvarar
Programmera Lego Mindstormsrobotar
 KUNGLIGA TEKNISKA HÖGSKOLAN Programmera Lego Mindstormsrobotar En introduktion till programmering Oskar Rosén 28/08-12 [email protected] Introduktion i datateknik (II1310) Sammanfattning Denna laboration gav
KUNGLIGA TEKNISKA HÖGSKOLAN Programmera Lego Mindstormsrobotar En introduktion till programmering Oskar Rosén 28/08-12 [email protected] Introduktion i datateknik (II1310) Sammanfattning Denna laboration gav
Skapa spelet Bug-race i Scratch
 1 Skapa spelet Bug-race i Scratch Välj en figur (Sprajt) Ta bort katten med hjälp av saxen i menyraden. Välj en ny figur med knappen. Det ska vara en figur som pekar åt vänster, och helst visas ovanifrån,
1 Skapa spelet Bug-race i Scratch Välj en figur (Sprajt) Ta bort katten med hjälp av saxen i menyraden. Välj en ny figur med knappen. Det ska vara en figur som pekar åt vänster, och helst visas ovanifrån,
Laboration i datateknik
 KUNGLIGA TEKNISKA HÖGSKOLAN Laboration i datateknik Programmering av LEGO-robot Rickard Eriksson 2012-09-06 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning Denna rapport är till följd
KUNGLIGA TEKNISKA HÖGSKOLAN Laboration i datateknik Programmering av LEGO-robot Rickard Eriksson 2012-09-06 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning Denna rapport är till följd
Labrapport: Programmering i NXC Programmera LEGO Maindstorm med NXC
 KTH ICT Labrapport: Programmering i NXC Programmera LEGO Maindstorm med NXC Jonathan Kindfält 23/08-2012 E-post ([email protected]) Introduktionskurs i datateknik II1310 Sammanfattning Denna rapport behandlar
KTH ICT Labrapport: Programmering i NXC Programmera LEGO Maindstorm med NXC Jonathan Kindfält 23/08-2012 E-post ([email protected]) Introduktionskurs i datateknik II1310 Sammanfattning Denna rapport behandlar
Objektorienterad programmering Föreläsning 2
 Objektorienterad programmering Föreläsning 2 Copyright Mahmud Al Hakim [email protected] www.webacademy.se Agenda Inläsning av data via dialogrutor Repetitioner (While-satsen och For-satsen) Nästlade
Objektorienterad programmering Föreläsning 2 Copyright Mahmud Al Hakim [email protected] www.webacademy.se Agenda Inläsning av data via dialogrutor Repetitioner (While-satsen och For-satsen) Nästlade
Här hittar du ett exempel på ritprogrammet: https://scratch.mit.edu/projects/82515788/
 Termin 1 Block 4 Ritprogram Nu kommer du att få skapa ett ritprogram där du sedan kan göra egna konstverk! Programmet låter dig rita med olika färgpennor, sudda med suddgummi och måla med stämplar som
Termin 1 Block 4 Ritprogram Nu kommer du att få skapa ett ritprogram där du sedan kan göra egna konstverk! Programmet låter dig rita med olika färgpennor, sudda med suddgummi och måla med stämplar som
Smart Rogic Manual. Robostick Manual
 Smart Rogic Manual Robostick Manual Ladda ner Smart Rogic Programfönster Programmera 4 Kopiera / Klipp ut 5 Ta bort symbol 6 Ångra / Gör om 7 Funktion 8 Ta bort program 9 Anslut via Bluetooth 0 Överföra,
Smart Rogic Manual Robostick Manual Ladda ner Smart Rogic Programfönster Programmera 4 Kopiera / Klipp ut 5 Ta bort symbol 6 Ångra / Gör om 7 Funktion 8 Ta bort program 9 Anslut via Bluetooth 0 Överföra,
Kevin Lane Kungliga Tekniska Högskolan Introduktionskurs i Datateknik (II1310) TIEDB0. [NXT Legorobot] [Programmering och felsökning]
![Kevin Lane Kungliga Tekniska Högskolan Introduktionskurs i Datateknik (II1310) TIEDB0. [NXT Legorobot] [Programmering och felsökning]](/thumbs/26/8137029.jpg "Kevin Lane Kungliga Tekniska Högskolan Introduktionskurs i Datateknik (II1310) TIEDB0. [NXT Legorobot] [Programmering och felsökning]") [NXT Legorobot] [Programmering och felsökning] Kevin Lane 28/8-12 [email protected] Introduktionskurs i datateknik II1310 1 Sammanfattning I denna laboration så fick vi programmera och felsöka en LEGO-robot.
[NXT Legorobot] [Programmering och felsökning] Kevin Lane 28/8-12 [email protected] Introduktionskurs i datateknik II1310 1 Sammanfattning I denna laboration så fick vi programmera och felsöka en LEGO-robot.
BESKRIVNING AV DISPLAY
 Inledning 1 DREAM styrsystem TALGIL erbjuder högeffektiva och anmärkningsvärt ekonomiska lösningar för hantering av medelstora till stora bevattningssystem. Systemet utnyttjar modern teknik för hårdvara
Inledning 1 DREAM styrsystem TALGIL erbjuder högeffektiva och anmärkningsvärt ekonomiska lösningar för hantering av medelstora till stora bevattningssystem. Systemet utnyttjar modern teknik för hårdvara
Snabbguide för datorstyrning och robotteknik med LEGO MINDSTORMS for Schools
 Snabbguide för datorstyrning och robotteknik med LEGO MINDSTORMS for Schools www.lego.com/education/mindstorms LEGO, LEGO logon och MINDSTORMS är varumärken som tillhör LEGO Gruppen. 2004 The LEGO Group.
Snabbguide för datorstyrning och robotteknik med LEGO MINDSTORMS for Schools www.lego.com/education/mindstorms LEGO, LEGO logon och MINDSTORMS är varumärken som tillhör LEGO Gruppen. 2004 The LEGO Group.
Användarhan dbok. Areaberäknare INNEHÅLLSFÖRTECKNING TOC. Handbok versionsnr. SV 2-1 Programvara versionsnr. 3.0 Kongskilde
 Användarhan dbok Areaberäknare Handbok versionsnr. SV 2-1 Programvara versionsnr. 3.0 Kongskilde INNEHÅLLSÖRTECKNING TOC 1. Översikt av areaberäkningsfunktion Areaberäknaren innehåller både en partiell
Användarhan dbok Areaberäknare Handbok versionsnr. SV 2-1 Programvara versionsnr. 3.0 Kongskilde INNEHÅLLSÖRTECKNING TOC 1. Översikt av areaberäkningsfunktion Areaberäknaren innehåller både en partiell
Lättläst om Victor Classic X
 Lättläst om Victor Classic X Viktiga knappar på spelaren Sätta på spelaren Till höger på spelarens ovansida finns en knapp. När du trycker på sätter du på spelaren. Du hör ett pip och en röst som säger:
Lättläst om Victor Classic X Viktiga knappar på spelaren Sätta på spelaren Till höger på spelarens ovansida finns en knapp. När du trycker på sätter du på spelaren. Du hör ett pip och en röst som säger:
JavaScript del 3 If, Operatorer och Confirm
 JavaScript del 3 If, Operatorer och Confirm Under förra uppgiften så kollade vi på hur användaren kan ge oss information via promt(), vi använde den informationen både för att skriva ut den och för att
JavaScript del 3 If, Operatorer och Confirm Under förra uppgiften så kollade vi på hur användaren kan ge oss information via promt(), vi använde den informationen både för att skriva ut den och för att
Metalldetektor CS300 Art.nr. 540523
 Metalldetektor CS300 Art.nr. 540523 Svensk kom i gång manual Tack för att du har köpt en Velleman produkt. Men din CS300 metall detek tor kan du söka efter mynt, smycken eller andra metallföremål överallt.
Metalldetektor CS300 Art.nr. 540523 Svensk kom i gång manual Tack för att du har köpt en Velleman produkt. Men din CS300 metall detek tor kan du söka efter mynt, smycken eller andra metallföremål överallt.
Bruksanvisning M-ANY PreMium MP3 Art 100043 I kartongen: Fjärrkontroll, hörlurar, batterier, USB-kabel, Audiokabel, väska, halssnodd, CD-Rom.
 Bruksanvisning M-ANY PreMium MP3 Art 100043 I kartongen: Fjärrkontroll, hörlurar, batterier, USB-kabel, Audiokabel, väska, halssnodd, CD-Rom. Komma igång: Stoppa in den medföljande CD-Rom skivan M-ANY
Bruksanvisning M-ANY PreMium MP3 Art 100043 I kartongen: Fjärrkontroll, hörlurar, batterier, USB-kabel, Audiokabel, väska, halssnodd, CD-Rom. Komma igång: Stoppa in den medföljande CD-Rom skivan M-ANY
ANVÄNDARMANUAL. Trådlös fjärrkontroll YB1FA SVENSKA. Drift- och skötselmanual Fjärrkontroll YB1FA
 ANVÄNDARMANUAL Trådlös fjärrkontroll YB1FA Tack för att du valde en INNOVA produkt. För korrekt användning, läs denna manual noggrant innan enheten tas i drift och förvara den lättåtkomligt för senare
ANVÄNDARMANUAL Trådlös fjärrkontroll YB1FA Tack för att du valde en INNOVA produkt. För korrekt användning, läs denna manual noggrant innan enheten tas i drift och förvara den lättåtkomligt för senare
PROGRAMMERING ÅK 9 INTRODUKTION
 PROGRAMMERING ÅK 9 INTRODUKTION VARFÖR PROGRAMMERING? Med programmering kan man: Skapa nästan vad som helst som är digitalt. Allt som är digitalt är uppbyggt av kod som människor har skrivit, finns i både
PROGRAMMERING ÅK 9 INTRODUKTION VARFÖR PROGRAMMERING? Med programmering kan man: Skapa nästan vad som helst som är digitalt. Allt som är digitalt är uppbyggt av kod som människor har skrivit, finns i både
Provverktyg för elever instruktioner [SE]
![Provverktyg för elever instruktioner [SE]](/thumbs/88/115070124.jpg "Provverktyg för elever instruktioner [SE]") Provverktyg för elever instruktioner [SE] Innehållsförteckning 1 Inledning 3 2 Göra proven 3 2.1 Logga in 3 2.2 Kontrollera ljudet för hörförståelseprovet 5 2.3 Göra ett prov 5 3 Uppgifterna 7 3.1 Uppgifter
Provverktyg för elever instruktioner [SE] Innehållsförteckning 1 Inledning 3 2 Göra proven 3 2.1 Logga in 3 2.2 Kontrollera ljudet för hörförståelseprovet 5 2.3 Göra ett prov 5 3 Uppgifterna 7 3.1 Uppgifter
KUNGLIGA TEKNISKA HÖGSKOLAN. Laboration II1310. Programmera Lego Mindstorm robot i NXC
 KUNGLIGA TEKNISKA HÖGSKOLAN Laboration II1310 Programmera Lego Mindstorm robot i NXC Johnny Vu 120904 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning Vi har genomfört en laboration för
KUNGLIGA TEKNISKA HÖGSKOLAN Laboration II1310 Programmera Lego Mindstorm robot i NXC Johnny Vu 120904 [email protected] Introduktionskurs i datateknik II1310 Sammanfattning Vi har genomfört en laboration för
Grunderna i stegkodsprogrammering
 Kapitel 1 Grunderna i stegkodsprogrammering Följande bilaga innehåller grunderna i stegkodsprogrammering i den form som används under kursen. Vi kommer att kort diskutera olika datatyper, villkor, operationer
Kapitel 1 Grunderna i stegkodsprogrammering Följande bilaga innehåller grunderna i stegkodsprogrammering i den form som används under kursen. Vi kommer att kort diskutera olika datatyper, villkor, operationer
INSTALLATIONSMANUAL COBRA 4400FD12. Fiat Ducato husbil 2012->
 INSTALLATIONSMANUAL COBRA 4400FD12 Läs noga igenom monteringsanvisningen innan arbetet påbörjas! Vid tveksamheter beträffande bilens elsystem rådfråga alltid bilimportörens tekniska avdelning eller se
INSTALLATIONSMANUAL COBRA 4400FD12 Läs noga igenom monteringsanvisningen innan arbetet påbörjas! Vid tveksamheter beträffande bilens elsystem rådfråga alltid bilimportörens tekniska avdelning eller se
RADIOMOTTAGARE RGBW SOM STYR EN GEMENSAM ANOD FÖR LED-strip
 TELECO AUTOMATION SRL - Via dell Artigianato, - 0 Colle Umberto (TV) ITALIEN TELEFON: ++9.0.5 FAX: ++9.0.5 - www.telecoautomation.com Det här dokumentet tillhör Teleco Automation Srl som förbehåller sig
TELECO AUTOMATION SRL - Via dell Artigianato, - 0 Colle Umberto (TV) ITALIEN TELEFON: ++9.0.5 FAX: ++9.0.5 - www.telecoautomation.com Det här dokumentet tillhör Teleco Automation Srl som förbehåller sig
SE Version ANVÄNDAR HANDLEDNING DATORKUNSKAP NATURVETENSKAP TEKNIK KONSTRUKTION MATEMATIK. LEGOeducation.com/MINDSTORMS
 SE Version 1.2.2 ANVÄNDAR HANDLEDNING πr DATORKUNSKAP NATURVETENSKAP TEKNIK KONSTRUKTION MATEMATIK LEGOeducation.com/MINDSTORMS INNEHÅLL INLEDNING + Välkommen... 3 + Så här använder du den här handboken...
SE Version 1.2.2 ANVÄNDAR HANDLEDNING πr DATORKUNSKAP NATURVETENSKAP TEKNIK KONSTRUKTION MATEMATIK LEGOeducation.com/MINDSTORMS INNEHÅLL INLEDNING + Välkommen... 3 + Så här använder du den här handboken...
Hur man använder CD-spelaren
 Hur man använder CD-spelaren Om CD-skivor Signalen som är inspelad på en CD-skiva läses av en laserstråle, så det förekommer ingen beröring med ytan. En repa på den inspelade ytan eller en kraftigt repad
Hur man använder CD-spelaren Om CD-skivor Signalen som är inspelad på en CD-skiva läses av en laserstråle, så det förekommer ingen beröring med ytan. En repa på den inspelade ytan eller en kraftigt repad
Programmera en mänsklig robot
 Programmera en mänsklig robot Eleverna får i lektionen skapa ett program för en klasskompis som ska vara robot och följa instruktionerna. Ett enkelt sätt att inleda ett arbete med programmering i skolan.
Programmera en mänsklig robot Eleverna får i lektionen skapa ett program för en klasskompis som ska vara robot och följa instruktionerna. Ett enkelt sätt att inleda ett arbete med programmering i skolan.
Installationsguide. För att installera mjukvara och hårdvara, följ nedanstående anvisningar.
 Installationsguide För att installera mjukvara och hårdvara, följ nedanstående anvisningar. Inkoppling av Logger 2020 eller SunLogger 2020 mot PC/LoggerSoft 1. Logger 2020 ansluts alltid via en router,
Installationsguide För att installera mjukvara och hårdvara, följ nedanstående anvisningar. Inkoppling av Logger 2020 eller SunLogger 2020 mot PC/LoggerSoft 1. Logger 2020 ansluts alltid via en router,
729G04 Programmering och diskret matematik. Python 2: Villkorssatser, sanningsvärden och logiska operatorer
 729G04 Programmering och diskret matematik Python 2: Villkorssatser, sanningsvärden och logiska operatorer Föreläsningsöversikt Vad händer när vi kör vår pythonkod? Programmerare Villkorssatser Jämförelser
729G04 Programmering och diskret matematik Python 2: Villkorssatser, sanningsvärden och logiska operatorer Föreläsningsöversikt Vad händer när vi kör vår pythonkod? Programmerare Villkorssatser Jämförelser
Konstruktion av en radiostyrd legobil. Digitala projekt av Arbon Vata Leonardo Vukmanovic Amid Bhatia
 Konstruktion av en radiostyrd legobil Digitala projekt av Arbon Vata Leonardo Vukmanovic Amid Bhatia 1 1.Innehållsförtäckning Rapport Radiostyrd LEGO bil...1 1. Innehållsförtäckning...2 2.0 Inledning...3
Konstruktion av en radiostyrd legobil Digitala projekt av Arbon Vata Leonardo Vukmanovic Amid Bhatia 1 1.Innehållsförtäckning Rapport Radiostyrd LEGO bil...1 1. Innehållsförtäckning...2 2.0 Inledning...3
SCENER. Att ändra i en scen
 192 DMX kanaler 12 armaturer med upp till 16 kanaler 30 banker med 8 scener i varje ( totalt 240 scener) 6 programmerbara chases med totalt 240 scener i varje 8 reglar för kanal kontroll Signerbar Joystick
192 DMX kanaler 12 armaturer med upp till 16 kanaler 30 banker med 8 scener i varje ( totalt 240 scener) 6 programmerbara chases med totalt 240 scener i varje 8 reglar för kanal kontroll Signerbar Joystick
HEMISSON. Webots-Botstudio laborationsbok. Sida1
 HEMISSON Webots-Botstudio laborationsbok Sida1 Allmänt om Hemisson Hemisson är en mobil minirobot för utbildning. Liknande enheter förekommer i en mängd sammanhang i dagens samhälle. Det kan vara i form
HEMISSON Webots-Botstudio laborationsbok Sida1 Allmänt om Hemisson Hemisson är en mobil minirobot för utbildning. Liknande enheter förekommer i en mängd sammanhang i dagens samhälle. Det kan vara i form
Digitalt lärande och programmering i klassrummet
 2016-03-03 Digitalt lärande och programmering i klassrummet Blue-Bot Introduktion Vi kommer i denna övning att bekanta oss med små charmiga robotar som heter Blue-Bots. Dessa robotar är bra för att introducera
2016-03-03 Digitalt lärande och programmering i klassrummet Blue-Bot Introduktion Vi kommer i denna övning att bekanta oss med små charmiga robotar som heter Blue-Bots. Dessa robotar är bra för att introducera
Tynker gratisapp på AppStore
 Tynker gratisapp på AppStore Innehåll Använda appen 2 Koordinatsystemet 6 Rita rektanglar i koordinatsystemet 7 Rita ellipser i koordinatsystemet 9 Rita trianglar i koordinatsystemet 11 Skapa mönster med
Tynker gratisapp på AppStore Innehåll Använda appen 2 Koordinatsystemet 6 Rita rektanglar i koordinatsystemet 7 Rita ellipser i koordinatsystemet 9 Rita trianglar i koordinatsystemet 11 Skapa mönster med
OzoCodes FÄRG KODER VINST/ UTGÅNG FART RÄKNARE RIKTNING TIMER COOLA RÖRELSER REFERENSSCHEMA VINST/UTGÅNG (SPELA IGEN) CRUISE SNABB TURBO NITRO BOOST
 CRUISE SNABB TURBO NITRO BOOST") OzoCodes FÄRG KODER REFERENSSCHEMA FART VINST/ UTGÅNG SNIGELFART LÅNGSAM CRUISE VINST/UTGÅNG (SPELA IGEN) RIKTNING SNABB TURBO NITRO BOOST VINST/UTGÅNG (GAME OVER) RÄKNARE GÅ TILL VÄNSTER GÅ RAKT FRAM
OzoCodes FÄRG KODER REFERENSSCHEMA FART VINST/ UTGÅNG SNIGELFART LÅNGSAM CRUISE VINST/UTGÅNG (SPELA IGEN) RIKTNING SNABB TURBO NITRO BOOST VINST/UTGÅNG (GAME OVER) RÄKNARE GÅ TILL VÄNSTER GÅ RAKT FRAM
Ipad i teknikundervisningen
 Ipad i teknikundervisningen Innan vi börjar 1. Anslut till MAUs nätverk 2. Om du har platta: ladda ner appen micro:bit från Appstore eller Google Play 3. Lite material som berör passet: https://tinyurl.com/cetis-malmo
Ipad i teknikundervisningen Innan vi börjar 1. Anslut till MAUs nätverk 2. Om du har platta: ladda ner appen micro:bit från Appstore eller Google Play 3. Lite material som berör passet: https://tinyurl.com/cetis-malmo
Uppdrag för LEGO projektet Hitta en vattensamling på Mars
 LEGO projekt Projektets mål är att ni gruppvis skall öva på att genomföra ett projekt. Vi använder programmet LabVIEW för att ni redan nu skall bli bekant med dess grunder till hjälp i kommande kurser.
LEGO projekt Projektets mål är att ni gruppvis skall öva på att genomföra ett projekt. Vi använder programmet LabVIEW för att ni redan nu skall bli bekant med dess grunder till hjälp i kommande kurser.
Programmera en mänsklig robot. Lektionen handlar om att skapa och följa instruktioner. Programmera en mänsklig robot
 Programmera en mänsklig robot Lektionen handlar om att skapa och följa instruktioner. Lektionsförfattare: Kristina Alexanderson Till läraren 1. Hur fungerar en robot? En digital lektion från https://digitalalektioner.iis.se
Programmera en mänsklig robot Lektionen handlar om att skapa och följa instruktioner. Lektionsförfattare: Kristina Alexanderson Till läraren 1. Hur fungerar en robot? En digital lektion från https://digitalalektioner.iis.se
Laboration - Programmering av LEGO Mindstorm robot
 Laboration - Programmering av LEGO Mindstorm robot Ayumi Sjöbergh Miyake 1 september 2012 [email protected] II1310 Introduktionskurs i datateknik 1 Sammanfattning Laborationen gick ut på att hitta och rätta
Laboration - Programmering av LEGO Mindstorm robot Ayumi Sjöbergh Miyake 1 september 2012 [email protected] II1310 Introduktionskurs i datateknik 1 Sammanfattning Laborationen gick ut på att hitta och rätta
Förnybar energi. Komma igång med LEGO Energimätare
 Förnybar energi Komma igång med LEGO Energimätare registradas de LEGO Group. 2010 LEGO Group. 1 Innehållsförteckning 1. Energimätare översikt... 3 2. Ansluta energilagret... 3 3. Ladda och ladda ut energimätaren...
Förnybar energi Komma igång med LEGO Energimätare registradas de LEGO Group. 2010 LEGO Group. 1 Innehållsförteckning 1. Energimätare översikt... 3 2. Ansluta energilagret... 3 3. Ladda och ladda ut energimätaren...
Programmering av LEGO NXT Robot
 KTH KISTA Programmering av LEGO NXT Robot Labborations uppgift : Linefollower Christoffer Killander 2012-08-30 [email protected] Datateknik II1310 Sammanfattning Skriv en kort sammanfattning av rapporten här.
KTH KISTA Programmering av LEGO NXT Robot Labborations uppgift : Linefollower Christoffer Killander 2012-08-30 [email protected] Datateknik II1310 Sammanfattning Skriv en kort sammanfattning av rapporten här.
Trafiksignal MPB Handhavande. For the love of lives
 Handhavande 80414000000 Handenhet MPB 1400 Handenheten används för snabb och enkel programmering av signalsystemet MPB 1400. Handenheten vägleder dig genom menyn. Ändra språk För att ändra språk, tryck
Handhavande 80414000000 Handenhet MPB 1400 Handenheten används för snabb och enkel programmering av signalsystemet MPB 1400. Handenheten vägleder dig genom menyn. Ändra språk För att ändra språk, tryck
Föreläsning 3: Typomvandling, villkor och val, samt textsträngar
 Föreläsning 3: Typomvandling, villkor och val, samt textsträngar Camilla Kirkegaard [email protected] Linköpings universitet Sweden October 14, 2013 1 Innehåll n n n n n Repetition Typomvandlingar
Föreläsning 3: Typomvandling, villkor och val, samt textsträngar Camilla Kirkegaard [email protected] Linköpings universitet Sweden October 14, 2013 1 Innehåll n n n n n Repetition Typomvandlingar