Seriekommunikation. Ur innehållet: Nätverkstopologier Nätverksprotokoll Asynkron/synkron seriell överföring Programmering av USART-krets
|
|
|
- Cecilia Nyberg
- för 7 år sedan
- Visningar:
Transkript
1 Seriekommunikation Ur innehållet: Nätverkstopologier Nätverksprotokoll Asynkron/synkron seriell överföring Programmering av USART-krets Läsanvisningar: Arbetsbok kapitel 7 Seriekommunikation 1
2 Parallell överföring + god bandbredd - många ledare ger dyrare överföringsmedia mycket snabbt vid korta avstånd Seriekommunikation 2
3 Seriell överföring + få ledare ger enklare (billigare) överföringsmedia - sämre bandbredd överföringshastighet efter prestandakrav Seriekommunikation 3
4 Nätverkstopologi Strukturer för hur datorer kopplas i hop, ofta ser man kombinationer av de olika varianterna. Olika protokoll har utvecklats för olika strukturer, exvis: RS232 (punkt till punkt) Ethernet (mask, stjärna) Token ring (ring) USB (träd) CAN, LIN (buss) Seriekommunikation 4
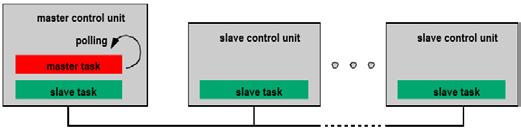
5 Nätverksprotokoll Kommunikationsmedia Ett "kommunikationsprotokoll" är en uppsättning regler som tillsammans entydigt specificerar hur datautbytet (datakommunikationen) ska gå till. Protokollen baseras oftast på någon speciell nätverkstopologi och förutsätter någon speciell accessmetod. Med acessmetod (åtkomstmetod) menar man den policy som används när en nod behöver skicka data och därför måste använda kommunikationsmediat. De vanligaste är: Master/Slave CDMA, Collission Detect, Multiple Access CRMA, Collission Resolution, Multiple Access TDMA, Time Division, Multiple Access "token, ring-protokoll Seriekommunikation 5
6 Asynkron överföring, Startbitsdetektering Protokollet anger en ledig -nivå på kommunikationsledningen. Då nivån växlar tolkas detta som en startbit (t 0 ). Mottagaren läser därefter av ledningen ( samplar ) efter ett halvt bitintervall (t 1 ) och därefter ytterligare hela bitintervall (t 2,t 3,t 4 osv). Observera att sändare och mottagare på förhand måste veta vilken bitrate som används. Seriekommunikation 6
7 Klocksynkronisering Även om bitraten är den samma kan skillnader i klockor orsaka en förskjutning av mottagarens sampling som så småningom resulterar i att fel bitintervall samplas... Genom att specificera maximalt antal bitar som skickas vid ett tillfälle, en ram, kan man också bestämma en största tillåten differens och därmed också acceptera skillnader hos sändares respektive mottagare klockor. Seriekommunikation 7
8 RS232, 9-bitars ram Exempel på hur en ram kan se ut Bitarnas betydelse definieras mera exakt av protokollet Exempelvis, RS232 : ASCII-tecknet z (= =0x7A, LSB först) överförs då på följande sätt Seriekommunikation 8
9 Synkron överföring Gemensam klocksignal och data EXEMPEL: Manchester kodning, bitlängden bestäms av positiva flanker, nivån i mitten av biten anger 0 eller 1. Metoden kallas RZ (Return to Zero) Kräver bara en ledning men minskar bandbredden. Seriekommunikation 9
10 Synkron överföring Klocksignal och data på skilda ledningar Kräver två ledningar men ökar bandbredden. Används för enklare tillämpningar, industristandarder: SPI (Serial Peripheral Interface) I 2 C använder denna teknik. Seriekommunikation 10




11 USART Universal Synchronous/Asynchronous Receiver/Transmitter Fysiskt gränssnitt (transceiver) RS232 (PtoP, duplex) LIN (asynkron buss) USART IR(trådlöst) Smartcard (synkron buss) Seriekommunikation 11

 Terminal")
12 USART RS232 Ofta kommuniceras UTF8 (ASCII-) tecknen "Terminal"- konsollfönster Det finns 8 olika seriekretsar... Fysiskt gränssnitt (transceiver) Terminal Programmerarens bild USART RS232 Seriekommunikation 12

13 USART programmerarens bild, som en struct... Registeruppsättning typedef struct tag_usart { volatile unsigned short sr; volatile unsigned short Unused0; volatile unsigned short dr; volatile unsigned short Unused1; volatile unsigned short brr; volatile unsigned short Unused2; volatile unsigned short cr1; volatile unsigned short Unused3; volatile unsigned short cr2; volatile unsigned short Unused4; volatile unsigned short cr3; volatile unsigned short Unused5; volatile unsigned short gtpr; } USART; #define USART1 ((USART *) 0x ) Seriekommunikation 13
14 USART Dataregister Läsning: RDR, Receive data register Innehåller det senast anlända tecknet från serielänken USART Statusregister Skrivning TDR, Transmit data register Tecken som skickas ut på serielänken Bit 7 ;TXE, Transmit data register empty är 1 om TDR tomt (ledigt) är 0 om tecken håller på att skickas (upptaget) nollställs vid skrivning till DR OUTCHAR(c): // Vänta tills TXE är 1 // Skriv 'c' till dataregistret Bit 5 ; RXNE, Receive data register not empty är 1 om nytt tecken finns i RDR är 0 om inget nytt tecken nollställs vid läsning från DR TSTCHAR: réturnera c // Är RXNE=1? // Nej, c = 0 // Ja, läs c från dataregistret // Returnera c Seriekommunikation 14
15 EXEMPEL: Enkla in- och utmatningsrutiner med USART Skapa funktioner: void _outchar(char c) som matar ut ASCII-tecknet 'c' till en terminal. char _tstchar(void) som kontrollerar om något tecken anlänt från terminalen, i så fall returnerar detta, annars returneras 0. char _inchar(void) som väntar tills något tecken anlänt från terminalen, och returnerar detta. Vi löser på tavlan... Seriekommunikation 15
16 USART feldetektering Bit 3 ORE: Overrun Error Denna bit sätts av hårdvaran om ett nytt tecken anländer samtidigt som det finns ett oläst tecken i dataregistret ("overrun error"). Ett avbrott genereras om RXNEIE = 1 i USART_CR1. Det återställs av en läsning från USART_SR följt av en läsning från USART_DR. 0: Inget förlorat tecken 1: Mottaget tecken är överskrivet (förlorat) Bit 1 FE: Framing Error Denna bit sätts av hårdvara när ett ramfel, oftast orsakat av förlorad synkronisering, upptäckts. Biten återställs av en läsning från USART_SR följt av en läsning från USART_DR. 0: Inget ramfel upptäcks 1: Ramfel eller BREAK-ram detekterad Bit 2 NF: Noise detection Flag Denna bit sätts av hårdvara när störningar i form av brus upptäcks i en mottagen ram. Biten återställs av en läsning från USART_SR följt av en läsning från USART_DR. 0: Ingen störning detekterad 1: Störning detekterad Bit 0 PE: Parity Error Denna bit sätts av hårdvara när ett paritetsfel uppträder hos mottagaren. Biten återställs av en läsning från USART_SR följt av en läsning från USART_DR. Programmet måste vänta på att RXNE-biten ettställts innan PE-biten återställs. Ett avbrott genereras om PEIE = 1 i USART_CR1. 0: Inget paritetsfel 1: Paritetsfel Seriekommunikation 16
17 USART initiering (CR1, CR2 och CR3) Maskinorienterad programmering #define UE (1<<13) #define TE (1<<3) #define RE (1<<2) USART1->cr1 = UE TE RE; USART_CR2 innehåller huvudsakligen kontroll för funktioner då USART implementerar LIN-protokollet. USART_CR3 innehåller kontroll för handskakningssignaler (RS232) och för funktioner då USART implementerar SmartCard eller IR-protokoll. Seriekommunikation 17
18 USART initiering av "baudrate" EXEMPEL: Sätt baudrate hos MD407 till baud 1. Bestäm USART_BRR för baudrate , OVER8=0 USARTDIV = f CK / (Baudrate 16) USARTDIV = / ( ) = 45, Konvertera till hexadecimala tal: = 2D 16 0, /16 3. Sätt baudrate-registret: USART1->brr = 0x2D9; void _init(void) { USART1->brr = 0x2D9; USART1->cr3 = 0; USART1->cr2 = 0; USART1->cr1 = UE TE RE; } Seriekommunikation 18

19 USART med avbrott Att överföra ett 10-bitars ord med bithastigheten baud tar ca 80 µs. Antag pessimistiskt att en genomsnittlig instruktion tar 4 klockcykler, cykeltiden (168 MHz är cirka 6 ns, dvs. en genomsnittlig instruktion något mindre än 24 ns. Det innebär att den väntetid som krävs mellan överföringen av två tecken motsvarar / , dvs. exekveringstiden för ca 3300 instruktioner. #define TXEIE (1<<7) #define TCIE (1<<6) #define RXNEIE (1<<5) Seriekommunikation 19
20 EXEMPEL: USART med avbrott Maskinorienterad programmering EXEMPEL: Skapa funktioner: void usart_outchar(char c) char usart_tstchar(void) void usart_init(void) som initierar USART-kretsen för avbrottsdriven kommunikation void usart_irq_routine(void) med en enkel 1-teckenbuffert för mottagare resp. sändare. Använd följande testprogram: void main(void) { char c; usart_init(); while( 1 ) { c = usart_tstchar(); if ( c ) usart_outchar(c); } } Vi löser på tavlan... Seriekommunikation 20
Seriekommunikation. Ur innehållet: Nätverkstopologier Nätverksprotokoll LIN, CAN Asynkron/synkron seriell överföring Programmering av USART-krets
 Seriekommunikation Ur innehållet: Nätverkstopologier Nätverksprotokoll LIN, CAN Asynkron/synkron seriell överföring Programmering av USART-krets Läsanvisningar: Arbetsbok kapitel 7 Seriekommunikation 1
Seriekommunikation Ur innehållet: Nätverkstopologier Nätverksprotokoll LIN, CAN Asynkron/synkron seriell överföring Programmering av USART-krets Läsanvisningar: Arbetsbok kapitel 7 Seriekommunikation 1
Seriekommunikation. Ur innehållet: Nätverkstopologier Nätverksprotokoll Asynkron/synkron seriell överföring Programmering av USART-krets
 Seriekommunikation Ur innehållet: Nätverkstopologier Nätverksprotokoll Asynkron/synkron seriell överföring Programmering av USART-krets Läsanvisningar: Arbetsbok kapitel 7 Seriekommunikation 1 Parallell
Seriekommunikation Ur innehållet: Nätverkstopologier Nätverksprotokoll Asynkron/synkron seriell överföring Programmering av USART-krets Läsanvisningar: Arbetsbok kapitel 7 Seriekommunikation 1 Parallell
Tentamen med lösningsförslag
 Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag DAT017 (DAT016) Maskinorienterad programmering IT EDA482 (EDA481) Maskinorienterad programmering D
Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag DAT017 (DAT016) Maskinorienterad programmering IT EDA482 (EDA481) Maskinorienterad programmering D
Projektlaboration 4, synkronisering av klockan
 Namn: Laborationen godkänd: Digitala system 15 p L T H I n g e n j ö r s h ö g s k o l a n v i d C a m p u s H e l s i n g b o r g Datorprojekt, del 4 Projektlaboration 4, synkronisering av klockan Asynkron
Namn: Laborationen godkänd: Digitala system 15 p L T H I n g e n j ö r s h ö g s k o l a n v i d C a m p u s H e l s i n g b o r g Datorprojekt, del 4 Projektlaboration 4, synkronisering av klockan Asynkron
Tentamen med lösningsförslag
 Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag EDA482 (EDA481) Maskinorienterad programmering D EDA487 (EDA486) Maskinorienterad programmering Z
Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag EDA482 (EDA481) Maskinorienterad programmering D EDA487 (EDA486) Maskinorienterad programmering Z
Dataöverföring på Parallell- och serieform MOP 11/12 1
 Dataöverföring på Parallell- och serieform MOP 11/12 1 Parallell dataöverföring I digitala system finns ofta behovet att flytta ett eller flera dataord från ett ställe (sändare) till ett annat ställe (mottagare).
Dataöverföring på Parallell- och serieform MOP 11/12 1 Parallell dataöverföring I digitala system finns ofta behovet att flytta ett eller flera dataord från ett ställe (sändare) till ett annat ställe (mottagare).
GPIO - General Purpose Input Output
 GPIO - General Purpose Input Output Ur innehållet: Digital IO Ideala och verkliga signaler Bitvis in- och utmatning Anslutning - fysiskt gränssnitt F407 - GPIO-modul tillämpningar Programmering av enkelt
GPIO - General Purpose Input Output Ur innehållet: Digital IO Ideala och verkliga signaler Bitvis in- och utmatning Anslutning - fysiskt gränssnitt F407 - GPIO-modul tillämpningar Programmering av enkelt
IS1500 Lösningar övning CE_O7 2014. CE_O7. Programmerad in/utmatning. Serieport. Förberedelser till nios2io.
 IS1500 ösningar övning CE_O7 2014 CE_O7. Programmerad in/utmatning. Serieport. Förberedelser till nios2io. 6.1. Vad är seriell kommunikation? a) Vad är skillnaden mellan seriell och parallell kommunikation?
IS1500 ösningar övning CE_O7 2014 CE_O7. Programmerad in/utmatning. Serieport. Förberedelser till nios2io. 6.1. Vad är seriell kommunikation? a) Vad är skillnaden mellan seriell och parallell kommunikation?
Programmering av inbyggda system. Seriekommunikation. Viktor Kämpe
 Seriekommunikation Viktor Kämpe Sändare Data buss Mottagare Data buss CS OE Data egister OE Data egister E Clock Shift egister xd Serial data out Serial data in xd Clock Shift egister Sändare och mottagares
Seriekommunikation Viktor Kämpe Sändare Data buss Mottagare Data buss CS OE Data egister OE Data egister E Clock Shift egister xd Serial data out Serial data in xd Clock Shift egister Sändare och mottagares
LABORATION DATORKONSTRUKTION TSEA83 UART. Namn och personnummer. Version: 1.0 2013 (OS)
") LABORATION DATORKONSTRUKTION TSEA83 UART Version: 1.0 2013 (OS) Namn och personnummer Godkänd 1 blank sida 2 Innehåll 1 Inledning 5 1.1 Syfte................................. 5 1.2 Förberedelser............................
LABORATION DATORKONSTRUKTION TSEA83 UART Version: 1.0 2013 (OS) Namn och personnummer Godkänd 1 blank sida 2 Innehåll 1 Inledning 5 1.1 Syfte................................. 5 1.2 Förberedelser............................
GPIO - General Purpose Input Output
 GPIO - General Purpose Input Output Ur innehållet: Ideala och verkliga signaler Bitvis in- och utmatning Anslutning - fysiskt gränssnitt F407 - GPIO-modul tillämpningar Läsanvisningar: Arbetsbok avsnitt
GPIO - General Purpose Input Output Ur innehållet: Ideala och verkliga signaler Bitvis in- och utmatning Anslutning - fysiskt gränssnitt F407 - GPIO-modul tillämpningar Läsanvisningar: Arbetsbok avsnitt
Enkla datatyper minne
 Enkla datatyper minne 143.56 sant Sonja A falskt 18 1999-10-29 Bertil Gralvik, KTH Ingenjörsskolan 1 Addera två tal Algoritmen Summera tal Mata in två tal Beräkna Skriv ut resultat Mata in tal 1 Mata in
Enkla datatyper minne 143.56 sant Sonja A falskt 18 1999-10-29 Bertil Gralvik, KTH Ingenjörsskolan 1 Addera två tal Algoritmen Summera tal Mata in två tal Beräkna Skriv ut resultat Mata in tal 1 Mata in
Övning 7. Timer, serieport
 Övning 7 Timer, serieport 7.6 timer_1 Memory-Mapped addresses 0x920 status 0x924 control 0x928 periodl 0x92C periodh 0x930 snapl 0x934 snaph 15 0 Run TO (Time-Out) ITO cont start stop timer_1 start D Q
Övning 7 Timer, serieport 7.6 timer_1 Memory-Mapped addresses 0x920 status 0x924 control 0x928 periodl 0x92C periodh 0x930 snapl 0x934 snaph 15 0 Run TO (Time-Out) ITO cont start stop timer_1 start D Q
Ulf Assarsson. Grafisk display + seriekommunika3on (USART) Läromoment: USART Grundläggande C-programmering del 2
 Läromoment: USART Grundläggande C-programmering del 2") Grafisk display + seriekommunika3on (USART) Ulf Assarsson Läromoment: USART Grundläggande C-programmering del 2 Pekare portadressering med structs structs med funk.onspekare Kopplat.ll: Arbetsbok avsni5:
Grafisk display + seriekommunika3on (USART) Ulf Assarsson Läromoment: USART Grundläggande C-programmering del 2 Pekare portadressering med structs structs med funk.onspekare Kopplat.ll: Arbetsbok avsni5:
Maskinorienterad programmering
 Externa avbrott Anslutning av extern avbrottsvippa, programmering med konfigurering och hantering av externa avbrott. Introduktion till time-sharing, enkel task-switch. Ur innehållet: NVIC och EXTI (SYSCFG)
Externa avbrott Anslutning av extern avbrottsvippa, programmering med konfigurering och hantering av externa avbrott. Introduktion till time-sharing, enkel task-switch. Ur innehållet: NVIC och EXTI (SYSCFG)
Seriekomunikation. CAN ett kommunikationsprotokoll för realtidssystem. Seriekomunikation -forts. Seriekomunikation -forts
 s4 CAN ett kommunikationsprotokoll för realtidssystem Sändare Seriekomunikation Mottagare Seriekommunikation Synkronisering - Datanät CAN Dataregister Göteborg 8 bitar - Parallell överföring Dataregister
s4 CAN ett kommunikationsprotokoll för realtidssystem Sändare Seriekomunikation Mottagare Seriekommunikation Synkronisering - Datanät CAN Dataregister Göteborg 8 bitar - Parallell överföring Dataregister
Arduinokurs. Kurstillfälle 4
 Kurstillfälle 4 CW-generering Det här kan ses som överkurs men kan ändå vara roligt för att kunna generera CW på ett enkelt sätt. Det blir en hel del nytt men vi tar det steg för steg Som alla vet gäller
Kurstillfälle 4 CW-generering Det här kan ses som överkurs men kan ändå vara roligt för att kunna generera CW på ett enkelt sätt. Det blir en hel del nytt men vi tar det steg för steg Som alla vet gäller
CAN ett kommunikationsprotokoll för realtidssystem MOP 12/13 1
 CAN ett kommunikationsprotokoll för realtidssystem 1 Seriekomunikation- Datanät- Topologi Buss Ring Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Stjärna Masknät 2 Seriekomunikation-
CAN ett kommunikationsprotokoll för realtidssystem 1 Seriekomunikation- Datanät- Topologi Buss Ring Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Nod Stjärna Masknät 2 Seriekomunikation-
Assemblerprogrammering för ARM del 2
 Assemblerprogrammering för ARM del 2 Ur innehållet Programflöde Subrutiner, parametrar och returvärden Tillfälliga (lokala) variabler Läsanvisningar: Arbetsbok kap 2 Quick-guide, instruktionslistan Assemblerprogrammering
Assemblerprogrammering för ARM del 2 Ur innehållet Programflöde Subrutiner, parametrar och returvärden Tillfälliga (lokala) variabler Läsanvisningar: Arbetsbok kap 2 Quick-guide, instruktionslistan Assemblerprogrammering
Tentamen med lösningsförslag
 Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag EDA482 (EDA481) Maskinorienterad programmering D EDA487 (EDA486) Maskinorienterad programmering Z
Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag EDA482 (EDA481) Maskinorienterad programmering D EDA487 (EDA486) Maskinorienterad programmering Z
Tentamen med lösningsförslag
 Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag DAT017 (DAT016) Maskinorienterad programmering IT EDA482 (EDA481) Maskinorienterad programmering D
Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag DAT017 (DAT016) Maskinorienterad programmering IT EDA482 (EDA481) Maskinorienterad programmering D
MIKRODATORTEKNIK 2012 INNEHÅLLSFÖRTECKNING
 MIKRODATORTEKNIK 2012 INNEHÅLLSFÖRTECKNING 1. INLEDNING 1.1. Milstolpar i datorns historia 1.2. Några viktiga begrepp 1.3. Mikrodatorns användningsområden 2. TALSYSTEM, KODER OCH BINÄR ARITMETK 2.1. Binära
MIKRODATORTEKNIK 2012 INNEHÅLLSFÖRTECKNING 1. INLEDNING 1.1. Milstolpar i datorns historia 1.2. Några viktiga begrepp 1.3. Mikrodatorns användningsområden 2. TALSYSTEM, KODER OCH BINÄR ARITMETK 2.1. Binära
6 Lågnivåprogrammering
 6 Lågnivåprogrammering När språket C konstruerades hade man som en av målsättningarna att språket skulle kunna hantera programmering på lågnivå. Med lågnivå menas det som man tidigare behövt använda assemblerprogrammering
6 Lågnivåprogrammering När språket C konstruerades hade man som en av målsättningarna att språket skulle kunna hantera programmering på lågnivå. Med lågnivå menas det som man tidigare behövt använda assemblerprogrammering
FX2N-232-IF, kommunikationsmodul KI00055F
 FX1S FX1N FX2N(C) FX3U(C) 1 Funktion och användningsområde Kommunikationsmodulen FX2N-232IF används för att kommunicera med externa enheter som t ex PC, streckkodsläsare, våginstrument, GSM-modem, skrivare
FX1S FX1N FX2N(C) FX3U(C) 1 Funktion och användningsområde Kommunikationsmodulen FX2N-232IF används för att kommunicera med externa enheter som t ex PC, streckkodsläsare, våginstrument, GSM-modem, skrivare
Ett minneselements egenskaper. F10: Minneselement. Latch. SR-latch. Innehåll:
 F: Minneselement Innehåll: - Latchar - Flip-Flops - egister - Läs- och skrivminne (andom-access Memory AM) - Läsminne (ead Only Memory OM) Ett minneselements egenskaper Generellt sett så kan följande operationer
F: Minneselement Innehåll: - Latchar - Flip-Flops - egister - Läs- och skrivminne (andom-access Memory AM) - Läsminne (ead Only Memory OM) Ett minneselements egenskaper Generellt sett så kan följande operationer
LARMANLÄGGNING. Digitala Projekt, EITF11. Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall
 LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
Realtidsprogrammering. En introduktion Implementering (med exempel från PIC)
") Realtidsprogrammering En introduktion Implementering (med exempel från PIC) Utan timing Periodtid varierar beroende på funktionernas exekveringstid. Specificera endast maxtid ( Worst case) och eventuellt
Realtidsprogrammering En introduktion Implementering (med exempel från PIC) Utan timing Periodtid varierar beroende på funktionernas exekveringstid. Specificera endast maxtid ( Worst case) och eventuellt
Tentamen. TSEA22 Digitalteknik 5 juni, 2015, kl
 Tentamen TSEA22 Digitalteknik 5 juni, 2015, kl. 08.00-12.00 Tillåtna hjälpmedel: Inga. Ansvarig lärare: Mattias Krysander Visning av skrivningen sker mellan 10.00-10.30 den 22 juni på Datorteknik. Totalt
Tentamen TSEA22 Digitalteknik 5 juni, 2015, kl. 08.00-12.00 Tillåtna hjälpmedel: Inga. Ansvarig lärare: Mattias Krysander Visning av skrivningen sker mellan 10.00-10.30 den 22 juni på Datorteknik. Totalt
Microprocessor / Microcontroller. Industrial Electrical Engineering and Automation
 Microprocessor / Microcontroller Varför? Billiga Innehåller bara det nödvändigaste Kräver få kringkomponenter Enkla att programmera PIC16F887 PIC16F887 In- och utgångar Pinnar på PIC16F887 Exempel: pinne
Microprocessor / Microcontroller Varför? Billiga Innehåller bara det nödvändigaste Kräver få kringkomponenter Enkla att programmera PIC16F887 PIC16F887 In- och utgångar Pinnar på PIC16F887 Exempel: pinne
Vad är en UART? Universal Asynchronous Receiver Transmitter parallella seriella parallell åttabitars signal mest signifikant bit
 Vad är en UART? Beteckningen UART är en förkortning för det engelska uttrycket Universal Asynchronous Receiver Transmitter, vilket översatt till svenska blir ungefär Universell Asynkron Mottagare/Sändare.
Vad är en UART? Beteckningen UART är en förkortning för det engelska uttrycket Universal Asynchronous Receiver Transmitter, vilket översatt till svenska blir ungefär Universell Asynkron Mottagare/Sändare.
Vad är kommunikation? Vad är datorkommunikation? Dataöverföring; Inledning
 Vad är kommunikation? Kommunikation är ett vitt begrepp. Vi använder det för att benämna till exempel ett samtal eller att vi själv förflyttar oss med till exempel tåg eller buss. Kommunikation kommer
Vad är kommunikation? Kommunikation är ett vitt begrepp. Vi använder det för att benämna till exempel ett samtal eller att vi själv förflyttar oss med till exempel tåg eller buss. Kommunikation kommer
Assemblerprogrammering, ARM-Cortex M4 del 3
 Assemblerprogrammering, ARM-Cortex M4 del 3 Ur innehållet: Fler pekartyper Användning av stacken Lagringsklasser, synlighet - lokala variabler Funktioner - returvärden och parametrar Läsanvisningar: Arbetsbok
Assemblerprogrammering, ARM-Cortex M4 del 3 Ur innehållet: Fler pekartyper Användning av stacken Lagringsklasser, synlighet - lokala variabler Funktioner - returvärden och parametrar Läsanvisningar: Arbetsbok
DAT 015 Maskinorienterad programmering 2010/2011. Uppbyggnad_och_funktion.pdf
 DAT 015 Maskinorienterad programmering 2010/2011 Uppbyggnad_och_funktion.pdf Ur innehållet: Bussystem, intern kommunikation i datorsystemet Adressavkodning, hur primärminne och I/O-enheter kan anslutas
DAT 015 Maskinorienterad programmering 2010/2011 Uppbyggnad_och_funktion.pdf Ur innehållet: Bussystem, intern kommunikation i datorsystemet Adressavkodning, hur primärminne och I/O-enheter kan anslutas
Digital kommunikation. Maria Kihl
 Digital kommunikation Maria Kihl Läsanvisningar Kihl & Andersson: 2.1-2.3, 3.1-2, 3.5-6 (ej CDM) Stallings: 3.1-4, 5.1, 5.2, 5.3, 8.1, 8.2 2 Protokoll När människor kommunicerar använder vi ett språk.
Digital kommunikation Maria Kihl Läsanvisningar Kihl & Andersson: 2.1-2.3, 3.1-2, 3.5-6 (ej CDM) Stallings: 3.1-4, 5.1, 5.2, 5.3, 8.1, 8.2 2 Protokoll När människor kommunicerar använder vi ett språk.
(Lösningsförslag finns sist i denna fil.)
") (Lösningsförslag finns sist i denna fil.) Läser externa signaler. Har 64 ingångar (kanaler), från 0 till 63. Kan bara avläsa en ingång i taget. Avlästa värdet positivt 16-bitars tal. Varje läsning tar
(Lösningsförslag finns sist i denna fil.) Läser externa signaler. Har 64 ingångar (kanaler), från 0 till 63. Kan bara avläsa en ingång i taget. Avlästa värdet positivt 16-bitars tal. Varje läsning tar
EDA480/EDA485 - Maskinorienterad programmering, tentamen 2006-xx-xx 1(7)
") EDA480/EDA485 - Maskinorienterad programmering, tentamen 2006-xx-xx 1(7) 1. Motivation ROM. 8kbyte 2 3 2 10 byte 13 Adressbitar [A12,A0] direkt till ROM-kapsel. RWM. 32kbyte 2 5 2 10 byte 15 Adressbitar
EDA480/EDA485 - Maskinorienterad programmering, tentamen 2006-xx-xx 1(7) 1. Motivation ROM. 8kbyte 2 3 2 10 byte 13 Adressbitar [A12,A0] direkt till ROM-kapsel. RWM. 32kbyte 2 5 2 10 byte 15 Adressbitar
F6: I/O hantering. Typer av I/O i ett datorsystem. Protokoll för synkronisering. Drivrutiner. Memory mapped Port mapped. Polling Timed Interrupt DMA
 F6: I/O hantering Typer av I/O i ett datorsystem Memory mapped Port mapped Protokoll för synkronisering Polling Timed Interrupt DMA Drivrutiner 1 Memory mapped I/O enheter avkodas precis som ett minne
F6: I/O hantering Typer av I/O i ett datorsystem Memory mapped Port mapped Protokoll för synkronisering Polling Timed Interrupt DMA Drivrutiner 1 Memory mapped I/O enheter avkodas precis som ett minne
Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk. Jens A Andersson
 Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk Jens A Andersson Att sända information mellan datorer värd 11001000101 värd Två datorer som skall kommunicera. Datorer förstår endast
Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk Jens A Andersson Att sända information mellan datorer värd 11001000101 värd Två datorer som skall kommunicera. Datorer förstår endast
Kapitel 3 o 4. Tillförlitlig dataöverföring. (Maria Kihl)
") Kapitel 3 o 4 Att skicka signaler på en länk Tillförlitlig dataöverföring Jens A Andersson (Maria Kihl) Att sända information mellan datorer 11001000101 värd värd Två datorer som skall kommunicera. Datorer
Kapitel 3 o 4 Att skicka signaler på en länk Tillförlitlig dataöverföring Jens A Andersson (Maria Kihl) Att sända information mellan datorer 11001000101 värd värd Två datorer som skall kommunicera. Datorer
Adressrum, programmerarens bild
 EDA 480 2009/2010 MC68HC12, Uppbyggnad.pdf Ur innehållet: Datorns byggblock Busskommunikation Synkron buss Asynkron buss Multiplex-buss avkodning för minne och I/O Minnesavbildad I/O Direktadresserad I/O
EDA 480 2009/2010 MC68HC12, Uppbyggnad.pdf Ur innehållet: Datorns byggblock Busskommunikation Synkron buss Asynkron buss Multiplex-buss avkodning för minne och I/O Minnesavbildad I/O Direktadresserad I/O
Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk. Att sända information mellan datorer. Information och binärdata
 Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk Jens A Andersson (Maria Kihl) Att sända information mellan datorer värd 11001000101 värd Två datorer som skall kommunicera. Datorer förstår
Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk Jens A Andersson (Maria Kihl) Att sända information mellan datorer värd 11001000101 värd Två datorer som skall kommunicera. Datorer förstår
Kommunikationssystem grundkurs, 2G1501 Övningar modul 1 Dataöverföring & fysisk infrastruktur 1 Dataöverföring
 1 Dataöverföring Syfte: Förstå begreppen dämpning och förstärkning av en signal. Kunna räkna i db och kunna använda det till beräkning av effektbudget. Ha en känsla för sambandet mellan bandbredd (Hz)
1 Dataöverföring Syfte: Förstå begreppen dämpning och förstärkning av en signal. Kunna räkna i db och kunna använda det till beräkning av effektbudget. Ha en känsla för sambandet mellan bandbredd (Hz)
Sekvensnät vippor, register och bussar
 ekvensnät vippor, register och bussar agens föreläsning: Lärobok kap.5 Arbetsbok kap 8,9,10 Ur innehållet: Hur fungerar en -latch? Hur konstrueras JK-, - och T-vippor? er och excitationstabeller egister
ekvensnät vippor, register och bussar agens föreläsning: Lärobok kap.5 Arbetsbok kap 8,9,10 Ur innehållet: Hur fungerar en -latch? Hur konstrueras JK-, - och T-vippor? er och excitationstabeller egister
Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk. Jens A Andersson
 Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk Jens A Andersson Att göra Kursombud Williams bok???? Kolla schemat: Övningar flyttade Labanmälan ska funka nu 2 Att sända information
Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk Jens A Andersson Att göra Kursombud Williams bok???? Kolla schemat: Övningar flyttade Labanmälan ska funka nu 2 Att sända information
Datakommunikation med IR-ljus.
 Datakommunikation med -ljus. I den här uppgiften skall du kommunicera med hjälp av infrarött () ljus. Du skall kunna sända tecken från tangentbordet samt ta emot tecken och visa dem på skärmen. Genom att
Datakommunikation med -ljus. I den här uppgiften skall du kommunicera med hjälp av infrarött () ljus. Du skall kunna sända tecken från tangentbordet samt ta emot tecken och visa dem på skärmen. Genom att
Maskinorienterad Programmering LP3-2017/2018
 Maskinorienterad Programmering LP3-2017/2018 Lars Bengtsson, D&IT Syften, målsättningar, kurslitteratur och genomförande Översikt av laborationer Introduktion till ARM-processorn och till laborationssystemet
Maskinorienterad Programmering LP3-2017/2018 Lars Bengtsson, D&IT Syften, målsättningar, kurslitteratur och genomförande Översikt av laborationer Introduktion till ARM-processorn och till laborationssystemet
Tentamen med lösningsförslag
 Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag DAT017 (DAT016) Maskinorienterad programmering IT EDA482 (EDA481) Maskinorienterad programmering D
Institutionen för data- och informationsteknik CHALMERS TEKNISKA HÖGSKOLA Tentamen med lösningsförslag DAT017 (DAT016) Maskinorienterad programmering IT EDA482 (EDA481) Maskinorienterad programmering D
Systemkonstruktion LABORATION REALTIDSPROGRAMMERING
 Systemkonstruktion LABORATION REALTIDSPROGRAMMERING Laborationsansvariga: Anders Arvidsson, Björn Lundblad Utskriftsdatum: 2002-10-31 Laboranter: 1 Syfte Denna laboration syftar till att öva användningen
Systemkonstruktion LABORATION REALTIDSPROGRAMMERING Laborationsansvariga: Anders Arvidsson, Björn Lundblad Utskriftsdatum: 2002-10-31 Laboranter: 1 Syfte Denna laboration syftar till att öva användningen
Lunds Tekniska Högskola. I-10 Grupp 11: David Sundström Max Schulz Albert Lundberg Handledare: Bertil Lindvall
 2013 Lunds Tekniska Högskola I-10 Grupp 11: David Sundström Max Schulz Albert Lundberg Handledare: Bertil Lindvall DIGITALA PROJEKT The objective of the course Digital Project is letting a group of students
2013 Lunds Tekniska Högskola I-10 Grupp 11: David Sundström Max Schulz Albert Lundberg Handledare: Bertil Lindvall DIGITALA PROJEKT The objective of the course Digital Project is letting a group of students
Assemblerprogrammering för ARM del 3
 Assemblerprogrammering för ARM del 3 Ur innehållet Fält och sammansatta typer (poster) Pekarvariabler och pekarkonstanter Pekararitmetik, operationer på fält Läsanvisningar: Arbetsbok kap 2 Quick-guide,
Assemblerprogrammering för ARM del 3 Ur innehållet Fält och sammansatta typer (poster) Pekarvariabler och pekarkonstanter Pekararitmetik, operationer på fält Läsanvisningar: Arbetsbok kap 2 Quick-guide,
F7: I/O hantering. Asynkron och synkron busscykel 68000 Bussfördelning. Periferikretsar
 1 F7: I/O hantering Periferikretsar ADC, DAC, UART, etc. Databussar Seriella bussar I 2 C USB CAN Systembussar PCI VME Asynkron och synkron busscykel 68000 Bussfördelning 1 Periferikretsar ADC/DAC Räknare
1 F7: I/O hantering Periferikretsar ADC, DAC, UART, etc. Databussar Seriella bussar I 2 C USB CAN Systembussar PCI VME Asynkron och synkron busscykel 68000 Bussfördelning 1 Periferikretsar ADC/DAC Räknare
LiTH Lab1: Asynkron seriell dataöverföring via optisk länk Laboration 1. Asynkron seriell dataöverföring via optisk länk
 Lab: 2007-09-06 Laboration Asynkron seriell dataöverföring via optisk länk Kravspecifikation Lennart Bengtsson Version.4 Granskad Godkänd Status Lennart Bengtsson Sida PROJEKTIDENTITET Laborationsgrupp,
Lab: 2007-09-06 Laboration Asynkron seriell dataöverföring via optisk länk Kravspecifikation Lennart Bengtsson Version.4 Granskad Godkänd Status Lennart Bengtsson Sida PROJEKTIDENTITET Laborationsgrupp,
Övningar modul 1 - Dataöverföring & fysisk infrastruktur
 1. Dataöverföring Övningar modul 1 - Dataöverföring & fysisk infrastruktur Syfte: Förstå begreppen dämpning och förstärkning av en signal. Kunna räkna i db och kunna använda det till beräkning av effektbudget.
1. Dataöverföring Övningar modul 1 - Dataöverföring & fysisk infrastruktur Syfte: Förstå begreppen dämpning och förstärkning av en signal. Kunna räkna i db och kunna använda det till beräkning av effektbudget.
Industriell Datakommunikation
 Industriell Datakommunikation Nätverk med signal- och partvinnad kabel samt fältbusstandard RS-485 Teori och övningar DataRäven Elektroteknik Email info@foxcomputer.se Webbsida http://www.foxcomputer.se
Industriell Datakommunikation Nätverk med signal- och partvinnad kabel samt fältbusstandard RS-485 Teori och övningar DataRäven Elektroteknik Email info@foxcomputer.se Webbsida http://www.foxcomputer.se
Digital kommunikation. Maria Kihl
 Digital kommunikation Maria Kihl Läsanvisningar Kihl & Andersson: 2.1-2.3, 3.1-2, 3.5-6 (ej CDM) Stallings: 3.1-4, 5.1, 5.2, 8.1, 8.2 Forouzan 5th: 3.1-3.4, 3.6, 4.1-4.2, 5.1, 6.1.1, 6.1.3 2 Protokoll
Digital kommunikation Maria Kihl Läsanvisningar Kihl & Andersson: 2.1-2.3, 3.1-2, 3.5-6 (ej CDM) Stallings: 3.1-4, 5.1, 5.2, 8.1, 8.2 Forouzan 5th: 3.1-3.4, 3.6, 4.1-4.2, 5.1, 6.1.1, 6.1.3 2 Protokoll
Tillförlitlig dataöverföring Egenskaper hos en länk Accessmetoder. Jens A Andersson
 Tillförlitlig dataöverföring Egenskaper hos en länk Accessmetoder Jens A Andersson Digitalisering av ljud Omvandling av ljud till binär data sker i tre steg: 1) Sampling 2) Kvantisering 3) Kodning Detta
Tillförlitlig dataöverföring Egenskaper hos en länk Accessmetoder Jens A Andersson Digitalisering av ljud Omvandling av ljud till binär data sker i tre steg: 1) Sampling 2) Kvantisering 3) Kodning Detta
Kapitel 2 o 3. Att skicka signaler på en länk. (Maria Kihl)
") Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk Jens A Andersson (Maria Kihl) Att sända information mellan datorer värd äd 11001000101 värd äd Tåd Två datorer som skall kllkommunicera.
Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk Jens A Andersson (Maria Kihl) Att sända information mellan datorer värd äd 11001000101 värd äd Tåd Två datorer som skall kllkommunicera.
C konstruerades i början på sjuttiotalet av Dennis Ritchie vid Bell Laboratories.
 C C konstruerades i början på sjuttiotalet av Dennis Ritchie vid Bell Laboratories. För att användas vid implementering av UNIX. Bygger på de tidigare språken BCPL och B. Målsättning: Att få ett högnivåspråks
C C konstruerades i början på sjuttiotalet av Dennis Ritchie vid Bell Laboratories. För att användas vid implementering av UNIX. Bygger på de tidigare språken BCPL och B. Målsättning: Att få ett högnivåspråks
Kihl & Andersson: , 3.1-2, (ej CDM) Stallings: 3.1-4, 5.1, 5.2, 5.3, 8.1, 8.2
 Stallings: 3.1-4, 5.1, 5.2, 5.3, 8.1, 8.2") Kihl & Andersson: 2.1-2.3, 3.1-2, 3.5-6 (ej CDM) Stallings: 3.1-4, 5.1, 5.2, 5.3, 8.1, 8.2 Hej Hej Vad är klockan? 14.00 Hej då New connection Connection approved Request for data Data transfer End connection
Kihl & Andersson: 2.1-2.3, 3.1-2, 3.5-6 (ej CDM) Stallings: 3.1-4, 5.1, 5.2, 5.3, 8.1, 8.2 Hej Hej Vad är klockan? 14.00 Hej då New connection Connection approved Request for data Data transfer End connection
Lista på registeruppsättningen i PIC16F877A Datablad TTL-kretsar 74-serien
 DIGITAL- OCH MIKRODATORTEKNIK, U2 11-01-12 09.00 13.00 Tillåtna hjälpmedel: Instruktionslista PIC16F877A Lista på registeruppsättningen i PIC16F877A Datablad TTL-kretsar 74-serien Fullständiga lösningar
DIGITAL- OCH MIKRODATORTEKNIK, U2 11-01-12 09.00 13.00 Tillåtna hjälpmedel: Instruktionslista PIC16F877A Lista på registeruppsättningen i PIC16F877A Datablad TTL-kretsar 74-serien Fullständiga lösningar
Datorteknik 2 (AVR 2)
") Namn: Laborationen godkänd: Digitala system 15 hp Datorteknik 2 (AVR 2) LTH Ingenjörshögskolan vid Campus Helsingborg Enkel in- och utmatning. Drivrutiner. Bithantering. I denna laboration ska vi förbättra
Namn: Laborationen godkänd: Digitala system 15 hp Datorteknik 2 (AVR 2) LTH Ingenjörshögskolan vid Campus Helsingborg Enkel in- och utmatning. Drivrutiner. Bithantering. I denna laboration ska vi förbättra
Structs och funktionspekare
 Grundläggande C-programmering del 3 Structs och funktionspekare Ulf Assarsson Läromoment: Structs, pekare till structs (pilnotation), array av structs, Portadressering med structs Funktionspekare, structs
Grundläggande C-programmering del 3 Structs och funktionspekare Ulf Assarsson Läromoment: Structs, pekare till structs (pilnotation), array av structs, Portadressering med structs Funktionspekare, structs
Föreläsning 3. Datakodning (Data encoding) Mål (fortsättning) Länk Mottagare. Sändare
 Mål (fortsättning) Länk Mottagare. Sändare") Sändare Föreläsning 3 Länk Mottagare Mål Behandla procedurer som behövs för överföring på en länk Förstå linjekodningens grundprinciper Förstå hur modulering fungerar Förstå orsaken till inramning av information
Sändare Föreläsning 3 Länk Mottagare Mål Behandla procedurer som behövs för överföring på en länk Förstå linjekodningens grundprinciper Förstå hur modulering fungerar Förstå orsaken till inramning av information
Digitalteknik F12. Några speciella automater: register räknare Synkronisering av insignaler. Digitalteknik F12 bild 1
 igitalteknik F2 Några speciella automater: register räknare Synkronisering av insignaler igitalteknik F2 bild Register Ett register är en degenererad automat som i allt väsentligt används för att lagra
igitalteknik F2 Några speciella automater: register räknare Synkronisering av insignaler igitalteknik F2 bild Register Ett register är en degenererad automat som i allt väsentligt används för att lagra
Arduinokurs. Del 1 - Vett och etikett. Talsystem. Binärt ettor och nollor
 Del 1 - Vett och etikett Talsystem Binärt ettor och nollor Det binära (Bin) talsystemet är grundläggande för alla datorer och logiska system. Ett värde kan endast vara sant eller falskt ett eller noll!
Del 1 - Vett och etikett Talsystem Binärt ettor och nollor Det binära (Bin) talsystemet är grundläggande för alla datorer och logiska system. Ett värde kan endast vara sant eller falskt ett eller noll!
Bussar och I/O. samt. vad kan man göra med NEXYS3
 Bussar och I/O samt vad kan man göra med NEXYS3 Den närmaste framtiden Grupp bildad Klar fredag 1600 Kravspec klar Vad ska ni bygga? Designskiss börjar Hur ska ni bygga den?... 5 6 7 8 9 PIPE-LAB UART-LAB
Bussar och I/O samt vad kan man göra med NEXYS3 Den närmaste framtiden Grupp bildad Klar fredag 1600 Kravspec klar Vad ska ni bygga? Designskiss börjar Hur ska ni bygga den?... 5 6 7 8 9 PIPE-LAB UART-LAB
F5: Högnivåprogrammering
 F5: Högnivåprogrammering Parameteröverföring Koppling mellan låg- och högnivåprogrammering Lokala variabler Heapen Datatyper 1 Subrutin, parameteröverföring: 1(3) Via register genom värde Skicka data via
F5: Högnivåprogrammering Parameteröverföring Koppling mellan låg- och högnivåprogrammering Lokala variabler Heapen Datatyper 1 Subrutin, parameteröverföring: 1(3) Via register genom värde Skicka data via
F5: Högnivåprogrammering
 1 F5: Högnivåprogrammering Parameteröverföring Koppling mellan låg- och högnivåprogrammering Lokala variabler Heapen Datatyper 1 Subrutin, parameteröverföring: 1(3) Via register genom värde Skicka data
1 F5: Högnivåprogrammering Parameteröverföring Koppling mellan låg- och högnivåprogrammering Lokala variabler Heapen Datatyper 1 Subrutin, parameteröverföring: 1(3) Via register genom värde Skicka data
EDI022. Digitala Projekt. Rapport. Björn Åkesson 5/20/2011
 EDI022 Digitala Projekt Rapport Björn Åkesson 5/20/2011 A synthesizer is built consisting of a bit-counter and phased-locked-loop to create various tones. The construction can be controlled via an external
EDI022 Digitala Projekt Rapport Björn Åkesson 5/20/2011 A synthesizer is built consisting of a bit-counter and phased-locked-loop to create various tones. The construction can be controlled via an external
Programbibliotek. Ur innehållet: Olika typer av bibliotek Kompilatorbibliotek C-bibliotek Run-time miljö Så skapar du ett nytt bibliotek
 Programbibliotek Ur innehållet: Olika typer av bibliotek Kompilatorbibliotek C-bibliotek Run-time miljö Så skapar du ett nytt bibliotek Läsanvisningar: Arbetsbok kapitel 8 Programbibliotek 1 Programbibliotek
Programbibliotek Ur innehållet: Olika typer av bibliotek Kompilatorbibliotek C-bibliotek Run-time miljö Så skapar du ett nytt bibliotek Läsanvisningar: Arbetsbok kapitel 8 Programbibliotek 1 Programbibliotek
Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk. Jens A Andersson
 Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk Jens A Andersson Att sända information mellan datorer värd 11001000101 värd Två datorer som skall kommunicera. Datorer förstår endast
Kapitel 2 o 3 Information och bitar Att skicka signaler på en länk Jens A Andersson Att sända information mellan datorer värd 11001000101 värd Två datorer som skall kommunicera. Datorer förstår endast
Programmering av grafisk display
 Programmering av grafisk display Arbetsboken avsnitt 5 - Drivrutrin för grafisk display, uppg. 5.10-5.16. Datablad LCD Grafisk under resurser på kurshemsidan, s.14-23. Lab 3 - Drivrutiner - Enkel grafik
Programmering av grafisk display Arbetsboken avsnitt 5 - Drivrutrin för grafisk display, uppg. 5.10-5.16. Datablad LCD Grafisk under resurser på kurshemsidan, s.14-23. Lab 3 - Drivrutiner - Enkel grafik
BiDisp2 PRODUKTIONSSYSTEM. Robust och flexibel display för industriella tillämpningar
 PRODUKTIONSSYSTEM BiDisp2 Robust och flexibel display för industriella tillämpningar Visualisering av nyckeltal Läsbar på upp till 80 m Underhållsfri med lång livslängd Enkel anslutning till Ethernet alt.
PRODUKTIONSSYSTEM BiDisp2 Robust och flexibel display för industriella tillämpningar Visualisering av nyckeltal Läsbar på upp till 80 m Underhållsfri med lång livslängd Enkel anslutning till Ethernet alt.
Adressavkodning - busskommunikation
 Adressavkodning - busskommunikation Kompendie kapitel 10 Bussystem adressbuss databuss styrbuss Ur innehållet: Bussystem, intern kommunikation i datorsystemet Adressavkodning, hur primär och I/O-enheter
Adressavkodning - busskommunikation Kompendie kapitel 10 Bussystem adressbuss databuss styrbuss Ur innehållet: Bussystem, intern kommunikation i datorsystemet Adressavkodning, hur primär och I/O-enheter
Maskinorienterad programmering
 Maskinorienterad programmering Sammanfattning Ur innehållet: Vi rekapitulerar kursens syften Vi repeterar kursens lärandemål Vi belyser hur den skriftliga delen av examinationen genomförs. Sammanfattning
Maskinorienterad programmering Sammanfattning Ur innehållet: Vi rekapitulerar kursens syften Vi repeterar kursens lärandemål Vi belyser hur den skriftliga delen av examinationen genomförs. Sammanfattning
Elektroteknik MF1016 föreläsning 9 MF1017 föreläsning 7 Mikrodatorteknik
 Elektroteknik MF1016 föreläsning 9 MF1017 föreläsning 7 - Inbyggda system - Analog till digital signal - Utvecklingssystem, målsystem - Labutrustningen - Uppbyggnad av mikrokontroller - Masinkod, assemblerkod
Elektroteknik MF1016 föreläsning 9 MF1017 föreläsning 7 - Inbyggda system - Analog till digital signal - Utvecklingssystem, målsystem - Labutrustningen - Uppbyggnad av mikrokontroller - Masinkod, assemblerkod
MAC-(sub)lagret. Nätlagret. Datalänklagret. Fysiska lagret LLC MAC. LLC = Logical Link Control-sublager MAC = Media Access Control-sublager
lagret. Nätlagret. Datalänklagret. Fysiska lagret LLC MAC. LLC = Logical Link Control-sublager MAC = Media Access Control-sublager") MAC-(sub)lagret Datalänklagret är uppdelat i två sublager, LLC (Logical Link Control) och MAC (Media Access Control). MAC-sublagret har till uppgift att hantera anslutningen mot valt nät och LLC döljer
MAC-(sub)lagret Datalänklagret är uppdelat i två sublager, LLC (Logical Link Control) och MAC (Media Access Control). MAC-sublagret har till uppgift att hantera anslutningen mot valt nät och LLC döljer
Instuderingsfrågor ETS052 Datorkommuniktion - 2014
 Instuderingsfrågor ETS052 Datorkommuniktion - 2014 October 13, 2014 Fråga 1. Beskriv de två komponenterna i PCM. Fråga 2. Förklara hur länklagret kan skilja på olika inkommande paket från det fysiska lagret.
Instuderingsfrågor ETS052 Datorkommuniktion - 2014 October 13, 2014 Fråga 1. Beskriv de två komponenterna i PCM. Fråga 2. Förklara hur länklagret kan skilja på olika inkommande paket från det fysiska lagret.
Programmeringsteknik för Ingenjörer VT06. Föreläsning 10
 Programmeringsteknik för Ingenjörer VT06 Föreläsning 10 Dagens föreläsning Repetition Strukturer Programmeringsteknik för ingenjörer, VT06 2 Deklaration: char name1[10]; char *name2; Repetition - Strängar
Programmeringsteknik för Ingenjörer VT06 Föreläsning 10 Dagens föreläsning Repetition Strukturer Programmeringsteknik för ingenjörer, VT06 2 Deklaration: char name1[10]; char *name2; Repetition - Strängar
Microprocessor / Microcontroller
 Microprocessor / Microcontroller Varför? Industrial Electrical Engineering and Automation Billiga Innehåller bara det nödvändigaste Kräver få kringkomponenter Enkla att programmera PIC16F887 PIC16F887
Microprocessor / Microcontroller Varför? Industrial Electrical Engineering and Automation Billiga Innehåller bara det nödvändigaste Kräver få kringkomponenter Enkla att programmera PIC16F887 PIC16F887
Kapitel 3 o 4 Att skicka signaler på en länk Tillförlitlig dataöverföring. Att göra. Att sända information mellan datorer
 Kapitel 3 o 4 Att skicka signaler på en länk Tillförlitlig dataöverföring Jens A Andersson (Maria Kihl) Att göra Kursombud 2 Att sända information mellan datorer 11001000101 värd värd Två datorer som skall
Kapitel 3 o 4 Att skicka signaler på en länk Tillförlitlig dataöverföring Jens A Andersson (Maria Kihl) Att göra Kursombud 2 Att sända information mellan datorer 11001000101 värd värd Två datorer som skall
Assemblerprogrammering - fördjupning
 Assemblerprogrammering - fördjupning Ur innehållet: Trampoliner tabellerade funktionsadresser Aktiveringspost med ARM Cortex M4 Mer om parameteröverföring Registerspill Kodgenerering - ISA "Kodoptimering"
Assemblerprogrammering - fördjupning Ur innehållet: Trampoliner tabellerade funktionsadresser Aktiveringspost med ARM Cortex M4 Mer om parameteröverföring Registerspill Kodgenerering - ISA "Kodoptimering"
Digitalitet. Kontinuerlig. Direkt proportionerlig mot källan. Ex. sprittermometer. Elektrisk signal som representerar ljud.
 Analog Digitalitet Kontinuerlig Direkt proportionerlig mot källan Ex. sprittermometer Elektrisk signal som representerar ljud Diskret Digital Representation som siffror/symboler Ex. CD-skiva Varje siffra
Analog Digitalitet Kontinuerlig Direkt proportionerlig mot källan Ex. sprittermometer Elektrisk signal som representerar ljud Diskret Digital Representation som siffror/symboler Ex. CD-skiva Varje siffra
Allmänt om Modbus. Modbus
 Modbus Modbus är ett populärt och fritt publicerat, royaltyfritt kommunikationsprotokoll för seriekopplingar med master/slave. Modbus-specifikationen styr meddelandens struktur och hantering, medan den
Modbus Modbus är ett populärt och fritt publicerat, royaltyfritt kommunikationsprotokoll för seriekopplingar med master/slave. Modbus-specifikationen styr meddelandens struktur och hantering, medan den
Programmering av grafisk display
 Programmering av grafisk display Arbetsboken avsnitt 5 - Drivrutrin för grafisk display, s. 86-96. Datablad LCD Grafisk under resurser på kurshemsidan, s.14-23. Lab 3 - Drivrutiner - Enkel grafik Lab 5
Programmering av grafisk display Arbetsboken avsnitt 5 - Drivrutrin för grafisk display, s. 86-96. Datablad LCD Grafisk under resurser på kurshemsidan, s.14-23. Lab 3 - Drivrutiner - Enkel grafik Lab 5
Ulf Assarsson. Grundläggande C-programmering del 2 Pekare och Arrayer. Läromoment:
 Grundläggande C-programmering del 2 Pekare och Arrayer Ulf Assarsson Läromoment: Pekare Absolutadressering (portar): typedef, volafle, #define Arrayer av pekare, arrayer av arrayer Hemuppgi9er: v2. Föregående
Grundläggande C-programmering del 2 Pekare och Arrayer Ulf Assarsson Läromoment: Pekare Absolutadressering (portar): typedef, volafle, #define Arrayer av pekare, arrayer av arrayer Hemuppgi9er: v2. Föregående
Modbus Seriell Kommunikation
 Översikt Modbus protokollet är en allmänt använd och väldokumenterad kommunikationsmetod. Det är ett enkelt och effektivt sätt att programmera våra olika produkter A typiskt Modbus-paket ser ut så här:
Översikt Modbus protokollet är en allmänt använd och väldokumenterad kommunikationsmetod. Det är ett enkelt och effektivt sätt att programmera våra olika produkter A typiskt Modbus-paket ser ut så här:
USB till COM-port. Inlämningsuppgift 10b USB till COM-port. Här ska du: Installera en konverterare mellan gränssnitten USB och RS232 (COM-port).
.") DATORTEKNIK 1A USB till COM-port Inlämningsuppgift 10b USB till COM-port Namn: Datum: Här ska du: Installera en konverterare mellan gränssnitten USB och RS232 (COM-port). Du behöver ha tillgång till följande:
DATORTEKNIK 1A USB till COM-port Inlämningsuppgift 10b USB till COM-port Namn: Datum: Här ska du: Installera en konverterare mellan gränssnitten USB och RS232 (COM-port). Du behöver ha tillgång till följande:
Digital och Datorteknik EDA /2011. EDA 451 Digital och datorteknik 2010/2011. Uppbyggnad_och_funktion.pdf
 EDA 451 Digital och datorteknik 2010/2011 Uppbyggnad_och_funktion.pdf Ur innehållet: Bussystem, intern kommunikation i datorsystemet Adressavkodning, hur primärminne och I/O-enheter kan anslutas Olika
EDA 451 Digital och datorteknik 2010/2011 Uppbyggnad_och_funktion.pdf Ur innehållet: Bussystem, intern kommunikation i datorsystemet Adressavkodning, hur primärminne och I/O-enheter kan anslutas Olika
Johan Karlsson Datavetenskap för teknisk kemi, 10p, moment 1 Datavetenskap Umeå Universitet. Tentamen
 Tentamen för teknisk kemi, 10p, moment 1 29 november 1999 Skrivtid 9-15 Hjälpmedel: av följande böcker. - U. Bilting och J. Skansholm: Vägen till C - A. Kelley & I. Pohl: A Book on C Maxpoäng: Gräns för
Tentamen för teknisk kemi, 10p, moment 1 29 november 1999 Skrivtid 9-15 Hjälpmedel: av följande böcker. - U. Bilting och J. Skansholm: Vägen till C - A. Kelley & I. Pohl: A Book on C Maxpoäng: Gräns för
Demonstration och konsultation Arbetsbokens avsnitt 7 Händelsestyrt processbyte Förberedande inför laboration 4
 Avbrott Demonstration och konsultation Arbetsbokens avsnitt 7 Händelsestyrt processbyte Förberedande inför laboration 4 Demonstrationsövning 5 1 Arbetsbok avsnitt 7: Undantag, avbrott - Uppgift 41 + enable_interrupt
Avbrott Demonstration och konsultation Arbetsbokens avsnitt 7 Händelsestyrt processbyte Förberedande inför laboration 4 Demonstrationsövning 5 1 Arbetsbok avsnitt 7: Undantag, avbrott - Uppgift 41 + enable_interrupt
Tentamen i Digitalteknik, EITF65
 Elektro- och informationsteknik Tentamen i Digitalteknik, EITF65 3 januari 2018, kl. 14-19 Skriv anonymkod och identifierare, eller personnummer, på alla papper. Börja en ny uppgift på ett nytt papper.
Elektro- och informationsteknik Tentamen i Digitalteknik, EITF65 3 januari 2018, kl. 14-19 Skriv anonymkod och identifierare, eller personnummer, på alla papper. Börja en ny uppgift på ett nytt papper.
Demonstration och konsultation Arbetsbokens avsnitt 5 och 6 LCD Grafisk display Introduktion till laboration 3
 LCD Display och Grafik Demonstration och konsultation Arbetsbokens avsnitt 5 och 6 LCD Grafisk display Introduktion till laboration 3 Målsättning: Efter lektionen ska alla självständigt kunna slutföra
LCD Display och Grafik Demonstration och konsultation Arbetsbokens avsnitt 5 och 6 LCD Grafisk display Introduktion till laboration 3 Målsättning: Efter lektionen ska alla självständigt kunna slutföra
Grundläggande C-programmering del 2 Pekare och Arrayer. Ulf Assarsson
 Grundläggande C-programmering del 2 Pekare och Arrayer Ulf Assarsson Läromoment: Pekare Absolutadressering (portar): typedef, volatile, #define Arrayer av pekare, arrayer av arrayer Hemuppgifter: v2. Föregående
Grundläggande C-programmering del 2 Pekare och Arrayer Ulf Assarsson Läromoment: Pekare Absolutadressering (portar): typedef, volatile, #define Arrayer av pekare, arrayer av arrayer Hemuppgifter: v2. Föregående
Grundläggande C-programmering del 2 Pekare och Arrayer. Ulf Assarsson
 Grundläggande C-programmering del 2 Pekare och Arrayer Ulf Assarsson Läromoment: Pekare Absolutadressering (portar): typedef, volatile, #define Arrayer av pekare, arrayer av arrayer Hemuppgifter: v2. Föregående
Grundläggande C-programmering del 2 Pekare och Arrayer Ulf Assarsson Läromoment: Pekare Absolutadressering (portar): typedef, volatile, #define Arrayer av pekare, arrayer av arrayer Hemuppgifter: v2. Föregående
Maskinorienterad Programmering IT2, LP2-2016/2017
 Maskinorienterad Programmering IT2, LP2-2016/2017 Syften, målsättningar, kurslitteratur och genomförande Översikt av laborationer Introduktion till ARM-processorn och till laborationssystemet 1 Kursens
Maskinorienterad Programmering IT2, LP2-2016/2017 Syften, målsättningar, kurslitteratur och genomförande Översikt av laborationer Introduktion till ARM-processorn och till laborationssystemet 1 Kursens
Maskinorienterad Programmering 2011/2012. CPU12 Reference Guide Stencil: Assemblerprogrammering.pdf
 Maskinorienterad Programmering 211/212 CPU12 eference Guide Stencil: Assemblerprogrammering.pdf Ur innehållet: äknarkretsar ( TMES ) Pulsbreddsmodulering ( PM ) Analog-/Digital- omvandling ( AD ) Seriekommunikation
Maskinorienterad Programmering 211/212 CPU12 eference Guide Stencil: Assemblerprogrammering.pdf Ur innehållet: äknarkretsar ( TMES ) Pulsbreddsmodulering ( PM ) Analog-/Digital- omvandling ( AD ) Seriekommunikation
F2: Motorola Arkitektur. Assembler vs. Maskinkod Exekvering av instruktioner i Instruktionsformat MOVE instruktionen
 68000 Arkitektur F2: Motorola 68000 I/O signaler Processor arkitektur Programmeringsmodell Assembler vs. Maskinkod Exekvering av instruktioner i 68000 Instruktionsformat MOVE instruktionen Adresseringsmoder
68000 Arkitektur F2: Motorola 68000 I/O signaler Processor arkitektur Programmeringsmodell Assembler vs. Maskinkod Exekvering av instruktioner i 68000 Instruktionsformat MOVE instruktionen Adresseringsmoder
LARMANLÄGGNING. Digitala Projekt, EITF11. Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall
 LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
LTH, Institutionen för Elektro- och Informationsteknik (EIT)
") LTH, Institutionen för Elektro- och Informationsteknik (EIT) Instruktioner: Svara tydligt på varje uppgift. Du får lov att använda en miniräknare. Alla svar och uträkningar måste vara väl motiverade! Denna
LTH, Institutionen för Elektro- och Informationsteknik (EIT) Instruktioner: Svara tydligt på varje uppgift. Du får lov att använda en miniräknare. Alla svar och uträkningar måste vara väl motiverade! Denna