Utvärdering av reflektorlös vägmätning med totalstation, laserskanner och UAS
|
|
|
- Monica Åström
- för 6 år sedan
- Visningar:
Transkript
, 15 hp Lantmäteriteknik Lantmätarprogrammet, teknisk inriktning Handledare: Stig-Göran Mårtensson Examinator: Mattias Lindman Bitr.")
1 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Utvärdering av reflektorlös vägmätning med totalstation, laserskanner och UAS Ghanim, Danny & Holmström, Max 2017 Examensarbete, Grundnivå (kandidatexamen), 15 hp Lantmäteriteknik Lantmätarprogrammet, teknisk inriktning Handledare: Stig-Göran Mårtensson Examinator: Mattias Lindman Bitr. examinator: Marianne Berg
2 i
3 Förord Ett stort tack vill vi rikta till vår handledare Stig-Göran Mårtensson som stöttat oss med sitt engagemang och sin kunskap. Dessutom vill vi tacka Mohammad Bagherbandi, Yuriy Reshetyuk och övriga undervisare som varit involverade under utbildningens gång. Till sist vill vi tacka hela klassen för tre förträffliga år på högskolan samt våra nära och kära. Dedikerad till W.N. Gävle, juni 2017 Danny Ghanim & Max Holmström ii
4 Sammanfattning Denna studie undersöker reflektorlös mätning av vägmitt med totalstation samt skapande av markmodeller av vägar genom terrester laserskanning (TLS) och unmanned aerial system (UAS). Målet är att utvärdera metoder som undviker traditionell mätning på väg med handhållen prisma eftersom detta innebär att den som mäter måste befinna sig på vägen, vilket medför risker för trafikrelaterade olyckor samt kostnader för skyddsåtgärder. Studieområdet är en asfaltsbelagd parkeringsyta med vita markeringar liknande väglinjer. Genom TLS och fotogrammetrisk bearbetning av UAS-bilder skapades punktmoln och sedan markmodeller över en 60x10 m yta. Toleransen för markmodeller av asfaltsytor beskrivs i SIS-TS 21144:2016, som anger att den maximalt tillåtna medelavvikelsen i höjd är 0,02 m. Markmodellerna från både TLS och UAS-fotogrammetri uppfyllde kraven och erhöll medelavvikelser på -0,001 m respektive 0,005 m. Reflektorlös mätning som utförs från marknivå och ned mot terrängen med totalstation eller TLS resulterar i stora infallsvinklar, vilket i sin tur orsakar en förlängd träffbild. Pga. stråldivergens ökar dessutom träffbildens storlek med avstånd. En ytterligare faktor som påverkar reflektorlös mätning är mätobjektets reflektans. Asfalt har en reflektans på knappt 20 %, medan reflektansen hos de vitmålade markeringarna är tre gånger så hög. När det gäller TLS minskar dessutom punkttätheten, som påverkar vilka detaljer som kan identifieras, i samband med ökande avstånd. Toleranserna för inmätning av kontrollpunkter har i denna studie satts till 0,05 m i plan och 0,02 m i höjd. Resultaten visar att reflektorlös totalstationsmätning mot väglinjer uppnår RMS under toleransgränsen på upp till 55 m från instrumentet. I plan syns en trend som visar att avvikelserna ökar i samband med avstånd/infallsvinkel. I höjd syns inte en lika tydlig trend men vid ett avstånd på 57,5 m ökar avvikelserna drastiskt i både plan och höjd, vilket får betraktas som ett överskridande av den maximala räckvidden. Med dessa mätmetoder behöver hänsyn tas till bl.a. fri sikt, vägens utformning och skick, faktorer i omgivningen, trafikbelastning samt det rådande vädret. För både punktmoln och bilder behöver dessutom georeferering göras och lämplig upplösning bestämmas. Slutsatsen är dock att samtliga metoder kompletterar varandra och kan användas för insamling, kontroll, inpassning och komplettering av markmodeller och undviker samtidigt riskerna som medföljer handhållen prismamätning på väg. Nyckelord: reflektorlös mätning, laserskanning, TLS, UAS, markmodeller, vägar iii
5 Abstract This study evaluates the potential of reflectorless total station (TS) measurements when surveying road centerlines and the creation of digital terrain models (DTM) of road surfaces based on terrestrial laser scanning (TLS) and unmanned aerial system (UAS). The aim is to evaluate methods that avoid traditional surveying using a handheld prism since this means that the surveyor must be on the road, which creates risks of traffic related accidents as well as costs for protective measures. The study area is an asphalt-covered surface with white markings resembling roadlines. Through TLS and photogrammetric processing of UAS-images, pointclouds and subsequently DTM:s were created over a 60x10 m surface. The tolerance for DTM:s of asphalt-covered surfaces is specified in SIS-TS 21144:2016, which states a maximum average vertical deviation of 0,02 m. The DTM:s from the TLS and UAS-photogrammetry both fulfilled the requirements and obtained a quality of -0,001 m and 0,005 m respectively. Reflectorless measurements performed from ground level and down toward the terrain with TS or TLS result in large angles of inclination, which in turn causes an extended footprint of the laser beam. Because of beam divergence the footprint expands further with longer distances. Another factor that affects reflectorless measurements is the reflectance of the surface. Asphalt has a reflectance of barely 20 % while the reflectance of the white painted markings is three times as high. Additionaly when it comes to TLS, the point cloud density, which affects what details can be identified, diminishes with increasing distance. The tolerances for surveying of control points has in this study been set to 0,05 m horizontally and 0,02 m vertically. The results show that the reflectorless measurements of roadlines with TS achieves RMS below the tolerance limit up to 55 m from the instrument. The horizontal coordinates show a trend that the deviations increase with distance/angle of inclination. Vertically such a trend is not quite as clear, but at a distance of 57,5 m both the horizontal and vertical deviations increase drastically, which may be considered as exceeding the maximum range. With these methods adherences to some limitations need to be taken into consideration, such as line of sight, the road s shape and condition, environmental factors, traffic and the weather. Furthermore, for both point clouds and images georeferencing needs to be done and a suitable resolution determined. The conclusion however, is that all methods complement each other and can be used for collecting, checking, fitting and completing DTM:s while avoiding the risks that traditional surveying methods using handheld prism creates. Key words: reflectorless surveying, laser scanning, TLS, UAS, DTM, roads iv
6 v
7 Innehållsförteckning FÖRORD... II SAMMANFATTNING... III ABSTRACT... IV INNEHÅLLSFÖRTECKNING... VI 1 INLEDNING BAKGRUND SYFTE OCH MÅL MÄTKVALITET OCH KVALITETSKRAV MÄTOSÄKERHET AKTUELLA TOLERANSKRAV TEORETISK KONTEXT METOD STUDIEOMRÅDE INSTRUMENT OCH PROGRAMVAROR DATAINSAMLING, BEARBETNING OCH BERÄKNING FÖRBEREDANDE FÄLTARBETE LASERSKANNING OCH REFLEKTORLÖS MÄTNING UAS-BILDER OCH FOTOGRAMMETRI FRAMSTÄLLNING OCH KONTROLL AV MARKMODELLER RESULTAT REFLEKTORLÖS MÄTNING MOT VÄGLINJE KVALITET AV MARKMODELLER DISKUSSION SLUTSATSER FRAMTIDA STUDIER REFERENSER BILAGA A REFERENSPUNKTER, STÖDPUNKTER OCH SFÄRER... A1 BILAGA B KONTROLLPUNKTER... B1 BILAGA C TEKNISKA SPECIFIKATIONER FÖR UAS... C1 BILAGA D RAPPORT FRÅN PHOTOSCAN... D1 BILAGA E HÖJDAVVIKELSER VID KONTROLL AV MARKMODELLER... E1 vi
8 1 Inledning 1.1 Bakgrund Dagens stora bygg- och anläggningsprojekt är indelade i olika faser och innan den s.k. produktionsfasen kan påbörjas behövs det noggrann planering och detaljerade underlag. I ett tidigt skede som benämns projektering tas handlingar fram i form av ritningar, beskrivningar, kartor och modeller. Ett underlag som efterfrågas vid projektering är markmodeller (digitala terrängmodeller, DTM), dvs. modeller av marken utan bebyggelse eller vegetation (Mårtensson, 2016). Högkvalitativa markmodeller kan skapas med hjälp av markbaserade mätinstrument men detta är mödosamt om omfattande arealer avses. Luftburna eller rymdbaserade verktyg är mer effektiva eftersom de täcker stora ytor på kort tid (Hirt, 2015). Insamlingen av data kan göras genom fotogrammetri (flyg- eller satellitbilder), laserskanning eller radar. En relativt ny mätmetod är obemannade flygfarkoster (UAS, UAV, drönare), som liksom bemannade flygfarkoster kan monteras med en kamera (UAS-fotogrammetri), laserskanner eller annan typ av sensor. UAS är billigare, snabbare och mer noggrann än många av de andra alternativen, och kan dessutom nå platser som är otillgängliga för människor (Reshetyuk, 2017; Siebert & Teizer, 2014). Efter insamling av data och viss bearbetning behöver markmodellens kvalitet verifieras för att säkerställa att beställarens krav uppfylls (SIS-TS 21144:2016). Trafikverkets råd är att terrestra (markbaserade) metoder bör användas för att utföra kontroll, inpassning eller komplettering av markmodeller som framtagits med hjälp av fotogrammetri eller laserskanning (HMK-Laserdata, 2015; Trafikverket, 2012; 2016c). Vid kontroll måste dock referensen vara inmätt med lägre mätosäkerhet än vad data som skall kontrolleras har (HMK-Terrester detaljmätning, 2015). Lämpliga instrument för sådan mätning är totalstation, som har mycket låg osäkerhet i både plan och höjd, eller terrester laserskanner (TLS). T.ex. använde Reshetyuk och Mårtensson (2016) TLS för att kontrollera en markmodell framtagen via UAS. Objekt som ofta ingår i projekteringsstadiet är vägar. Trafikverket ställer krav på att vägmitt skall ingå i projekteringsunderlag och efterfrågar i sina beställda markmodeller att linjer och punkter mäts in i enlighet med SIS-TS 21144:2016 tabell 9, vid befintliga vägar och diken (Trafikverket, 2016a; 2016b). I nämnda dokument står det att vägmitt alltid ska mätas in när det gäller allmän väg samt vägar med sidolutning eller dubbelsidigt tvärfall. Vägmitt nämns också i Trafikverket (2016c) som en karakteristisk brytlinje i terrängen. 1
9 Karakteristiska brytlinjer bör enligt SIS-TS 21144: definieras i markmodeller framtagna genom fotogrammetriska metoder eller laserskanning. I HMK-Laserdata (2015) beskrivs vägmitt som en lämplig detalj att kontrollmäta, eftersom de vitmålade linjerna är synliga och kan urskiljas i punktmoln (genom intensitetsvärden som registreras av laserskannern). Det framgår alltså att inmätning av vägmitt ofta efterfrågas vid detaljmätning för projekteringssyfte. Om mätningen görs med totalstation och mot prisma krävs det dock att den som mäter fysiskt befinner sig på vägen, vilket medför en rad olägenheter. Varje år sker över 300 trafikolyckor vid vägarbeten och totalt omkom 56 personer till följd av sådana olyckor åren Mellan 2003 och 2015 skadades 195 vägarbetare varav: 6 omkom, 39 blev svårt skadade och 150 lindrigt skadade (Trafikverket, 2014a; 2016c). Trafikverket konstaterar att i många av de olycksfall som resulterat i svåra skador har vägarbetet involverat personal på vägen. Av 19 sådana olyckor gällde två just mätarbete och resulterade i en svår och en lindrig skada (Trafikverket, 2014b). Förutom den risk som förbipasserande fordon utgör, utsätts vägarbetare även för buller, avgaser, ljus från passerande fordon och vibrationer. Dessa förhållanden kan påverka vägarbetaren både psykiskt och fysiskt. För att minimera antalet olyckor och deras påföljder finns det krav från Trafikverket (2014c) på att Truck Mounted Attenuator (TMA) måste användas vid intermittent (ryckvis framgående) arbete på skyddsklassad väg. TMA är ett skyddsfordon som fungerar som påkörningsskydd och dirigerar trafiken runt vägarbetet. Förutom att användandet av TMA blir ett störningsmoment i trafikflödet med minskad framkomlighet så kostar det även stora summor att hyra in. Om reflektorlös totalstationsmätning istället används för att mäta vägmitt eller andra detaljer på vägen skulle många av dessa olägenheter försvinna. Instrumentet kan då ställas upp på trottoaren eller någon annanstans bredvid vägen och mätningen sker direkt mot vägytan. Detsamma gäller TLS som kan användas för att skanna in vägar samt UAS som från luften kan antingen skanna eller fotografera marken. Det finns dock faktorer som gör att reflektorlös mätning har en högre mätosäkerhet än mätning mot prisma och dessa faktorer undersöks i avsnitt Syfte och mål Denna studie syftar till att undersöka reflektorlös mätning med totalstation, TLS samt UAS för inmätning av vägar. Målet är att utvärdera alternativa och säkrare metoder än handhållen prismabaserad inmätning av vägar i allmänhet och vägmitt i synnerhet. För att uppnå målet kommer resultaten från respektive metod att kontrolleras mot referensvärden och ställas mot aktuella kvalitetskrav. Slutligen kommer mätmetodernas förutsättningar och begränsningar diskuteras och jämföras med varandra. 2
10 1.3 Mätkvalitet och kvalitetskrav Mätosäkerhet JCGM 100 (2008), vanligen benämnd som GUM, är en internationell riktlinje för att beskriva mätkvalitet som har adopterats av svenska aktörer. Innan GUM användes ofta begreppen noggrannhet och precision. Noggrannhet anger avvikelsen mellan en mätnings erhållna värde och det sanna värdet. Precision däremot är spridningen runt medelvärdet i en serie av repeterade mätningar. Med GUM ersätts dessa begrepp av ett samlingsnamn som är mätosäkerhet (lägesosäkerhet i HMK) och som kan beräknas på olika sätt. Mätosäkerheten påverkas av fel som kan delas in i kategorierna systematiska avvikelser, slumpmässiga avvikelser och grova fel/misstag. Men för att det överhuvudtaget ska vara möjligt att kontrollera mätningar krävs det minst en överbestämning, dvs. fler mätningar än det minsta nödvändiga antalet (Mårtensson, 2016). Kontrollerbarheten är ett mått på hur lätt grova fel kan upptäckas och är en funktion av antalet överbestämningar i relation till antalet mätningar. Stora misstag brukar upptäckas i efterberäkningarna men små misstag kan undgå detektering och påverka mätresultaten. Systematiska avvikelser kan beräknas och korrigeras; antingen före eller efter mätningen. Det är dock inte möjligt att korrigera för slumpmässiga avvikelser men det är de som tillåter kvalitetsgranskning av mätningen genom noggrannhet i utförande (Mårtensson, 2016). Den enklaste skattningen av mätosäkerhet är att utgå från medeltalet av upprepade observationer och beräkna standardosäkerheten, som är ett mått på en enskild mätnings osäkerhet i en mätserie och beräknas enligt följande formel: u(x) = n i=1 (x i x ) 2 n 1 (1) där n = antal observationer i mätserien; x i = enskild mätning; x = mätseriens medeltal. Ett annat sätt att beräkna mätosäkerheten är Root Mean Square error (RMS), eller kvadratiska medelvärdet (kvam) på svenska (Mårtensson, 2016). RMS hanterar spridningen runt ett värde som accepterats som korrekt (vanligen vid kontrollmätning) och fångar upp både systematiska och slumpmässiga fel. Formeln för RMS: u kvam (x) = (x i x sant ) 2 n i=1 n (2) 3
11 En mätosäkerhet kan betecknas som σ (sigma) och utvidgas med täckningsfaktorn k. Den ursprungliga mätosäkerheten skrivs som 1σ, dvs. 1-sigmanivå, och då är täckningsfaktorn k = 1. Ett konfidensintervall är ett intervall med x som mittenvärde och sträcker ut sig på vardera sida med ±k σ. Sannolikheten för att den sökta mätstorheten hamnar innanför konfidensintervallet vid 1σ är ca 68,3 %. Denna sannolikhet benämns som konfidensnivå, konfidensgrad eller täckningsgrad. När k > 1 kallas det för utvidgad mätosäkerhet. Vid 2σ är k = 2 och konfidensnivån blir 95,5 %. Vanligen används dock konfidensnivån 95 % (Mårtensson, 2016), vilket även förespråkas i GUM (JCGM 100, 2008). Täckningsfaktorn blir i det fallet 1,96 men avrundas i GUM upp till 2, vilket även är täckningsfaktorn som används i denna studie. Observationer vars avvikelse från den uppskattade mätstorheten överskrider 3σ betraktas som grova fel (HMK-Geodatakvalitet, 2015). 2-sigmanivåer anses vara en varningsnivå och observationer som hamnar utanför det konfidensintervallet borde undersökas närmare. Medelavvikelsen vid kontroll av terrängmodeller kan beräknas enligt följande formel från SIS-TS 21144: : x = n ( x i=1 i) n (3) där x i = enskild avvikelse. Toleransen är den maximalt tillåtna avvikelsen från det sanna värdet och varierar beroende på mätobjekt och ändamål, men sätts vanligen till just 2σ baserat på mätningens standardosäkerhet (HMK-Ordlista och förkortningar, 2015) Aktuella toleranskrav I HMK definieras fyra olika nivåer, standardnivå 0 3, som skall ligga till grund för beställarens kvalitetskrav. Standardnivå 3 är den striktaste och är till för projektinriktad mätning och kartläggning, med en rekommenderad maximal mätosäkerhet samt geometrisk bildupplösning på 0,05 m. Exempel på lämpliga mätmetoder för standardnivå 3 är totalstation, Nätverks-RTK, TLS och bilddata från helikopter, markfordon eller UAS (HMK-Geodatakvalitet, 2015). Vid detaljmätning ska mätmetodens RMS understiga 40 % av toleransen enligt SIS-TS 21143:
12 Toleranserna för markmodeller i SIS-TS 21144: avser maximal medelavvikelse i höjd och är 0,02 m för hårdgjorda ytor som asfalt. I SIS-TS 21144: står det att kontroll av markmodeller skall baseras på kontrollprofiler, dvs. punkter som binds samman till en linje. Antalet kontrollprofiler som rekommenderas skiljer sig beroende på bl.a. noggrannhetskrav och areal. Gemensamt är dock att det bör ingå minst 20 punkter i varje kontrollprofil och att längden är minst 20 m. Kontrollmätningen görs främst med antingen totalstation eller RTK men om annan metod kan uppfylla ovannämnda krav så kan den också användas (SIS-TS 21144:2016). RMS för varje enskild punkt i kontrollprofilen får maximalt vara 0,02 m i höjd samt 0,05 m i plan och är de toleransgränser för reflektorlös totalstationsmätning som används i denna studie. I HMK framgår det att toleransen i plan inte bör överstiga toleransen i höjd med mer än en faktor av 2 3 (HMK-Terrester laserskanning, 2015), vilket överensstämmer med ovannämnda toleranskrav vid standardnivå 3. 5
13 2 Teoretisk kontext Det här avsnittet undersöker vilka faktorer som påverkar kvaliteten av reflektorlös mätning. Zámecníková, Wieser, Woschitz och Ressl (2014) presenterar följande felkällor som är relevanta för just reflektorlös mätning: mätytans reflektans; materialets ytgenomträngning; laserstrålens infallsvinkel; samt träffbildens storlek (fotavtryck). En ytas reflektans är kvoten av den mottagna och den sända laserkraften (skrivs ofta i procent) och påverkar den möjliga räckvidden vid mätning mot ytan samt även avståndsavläsningen (Reshetyuk, 2012). Faktorer som påverkar reflektansen är bland annat material, färg, fuktighet, temperatur, belysning och laserstrålens våglängd (Kerekes, Strackerjan & Salvaggio, 2008; Kowalczyk & Rapinski, 2014; Lambrou & Pantazis, 2010; Mårtensson, 2016; Reshetyuk, 2012; 2017; Zámecníková et al., 2014). Ljust material har ofta högre reflektans än mörkt (Reshetyuk, 2012). I Reshetyuk (2006) har mätningar mot olika material med olika reflektansnivåer erhållit skilda avståndsavläsningar och standardosäkerhet. Detta fenomen kallas för crosstalk (Hancock, 1999; Reshetyuk, 2006). Skillnaden i avståndsavläsning mellan svart och vit papp var 3 mm i Reshetyuk (2006) och i Pfeifer, Dorninger, Haring och Fan (2007) var skillnaden upp till 2 mm mellan objekt med olika reflektansnivåer. Testerna som utfördes av Zámecníková et al. (2014) visar också att mätningar mot material med samma reflektansnivå får skilda värden, vilket författarna tillskriver materialens ytgenomträngning. Vissa material är omöjliga att utföra precisa mätningar mot (t.ex. glas och is) på grund av för hög ytgenomträngning på flera centimeter (Lambrou & Pantazis, 2010). Intensiteten är signalstyrkan som instrumentet mottager och beror inte bara på objektets reflektans, utan även på avstånd till objektet samt infallsvinkeln. I Reshetyuk (2017) presenteras följande formel för beräkning av intensitetsvärde (I): I = ρ cos (α) R 2 (4) där ρ = objektets reflektans; α = infallsvinkeln; R = horisontellt avstånd. Enligt Zámecníková et al. (2014) och Reshetyuk (2017) avtar intensiteten generellt i samband med ökat avstånd till den reflekterande ytan; vilket överensstämmer med testerna i Lichti och Harvey (2002), där intensiteten halverades vid 53- kontra 3- meters avstånd. Minskningen börjar dock efter en topp vid 5-meters avstånd (Zámecníková et al., 2014). 6
14 Om ytan är blöt sjunker reflektansen och därmed intensiteten (på längre avstånd) ytterligare, vilket också kan minska räckvidden (Lichti & Harvey, 2002). Även om fuktighet är en avgörande faktor för reflektorlös mätkvalitet enligt Mårtensson (2016), visar Reshetyuk (2006) samt Lichti och Harvey (2002) att längdmätningar inte påverkas nämnvärt av hög fuktighet. Trots detta bör reflektorlös mätning utföras vid optimala atmosfäriska förhållanden som klart väder och mulen himmel, eftersom regn, dimma, damm och starkt solljus kan påverka räckvidden negativt (Leica Geosystems, u.å.b; Reshetyuk, 2012). Reshetyuk (2017) påstår att standardosäkerheten i längdmätningar blir högre ju lägre intensiteten är, vilket bevisas i Zámecníková et al. (2014). Om intensiteten är för låg kan det bli omöjligt för instrumentet att detektera retursignalen; särskilt på långa avstånd (Reshetyuk, 2012). Kerekes et al. (2008) påstår att asfalt har en reflektans på ca 8 12 % i det synliga spektrum, medan Reshetyuk (2017) hävdar att reflektansen är 20 %, och ny asfalt har dessutom lägre reflektans än äldre asfalt (Herold, 2007). Detta är en mycket låg reflektans och hindrar troligen mätningar på lång räckvidd. Mätningar av vägmitt görs därför helst mot de målade mittlinjerna, som istället har en reflektans på % (Herold, 2007). Dock bör punkter som hamnar på både målad och icke-målad yta undvikas, eftersom det då uppstår s.k. temporal mixing (Hancock, 1999). Reflektorlös mätning av kanter överlag bör undvikas pga. avvikelser i avståndsmätningar som påverkas av så kallade kant-effekter, eller mixed pixels som det också benämns (Hancock, 1999; Lichti, Gordon & Tipdecho, 2005; Reshetyuk, 2006). Effekten tillkommer också när exempelvis grässtrån skannas in och dess yta är mindre än själva träffbilden (Lei et al., 2013). Detta medför att endast en del av strålen reflekteras och den kvarvarande signalen fortsätter och reflekteras sedan mot ett bakomliggande objekt. Resultatet av detta är att avståndet blir ett viktat medeltal för de två avståndsavläsningarna och hamnar någonstans mellan de objekt som lasern reflekteras mot (Lei et al., 2013). Denna felkällas inverkan beror på materialet som mäts men kan orsaka avläsningar som avviker med 2 5 cm och till och med uppåt 10 cm (Reshetyuk, 2006). Att mätningars kvalitet försämras med avstånd (Beshr & Abo Elnaga, 2012; Fawzy, 2015; Soudarissanane, Lindenbergh, Menenti & Teunissen, 2009; Zámecníková et al., 2014) beror till viss del på att intensiteten avtar men beror till mesta del enligt Soudarissanane et al. (2009) på träffbildens storlek; som är direkt relaterad till vad som kallas stråldivergens. Efter att laserstrålen har sänts från instrumentet börjar den att divergera och dess storlek ökar därmed allt eftersom den färdas längre ifrån avsändarpositionen. Avvikelsernas och mätosäkerhetens storlek beror därför på träffbildens radie, eftersom retursignalen kan komma från vilken punkt som helst inom träffbilden (Reshetyuk, 2006). 7
15 Stråldivergensen har enligt Kowalczyk och Rapinski (2014) ett stort inflytande på mätresultaten när mätningen görs med en infallsvinkel större än 0 (90 i artikeln). Infallsvinkeln definieras i denna studie som vinkeln mellan laserstrålen och planet som är ortogonalt mot ytan som laserstrålen träffar. Soudarissanane et al. (2009) skriver att träffbilden sträcks ut och förstoras när den träffar från sidan jämfört med träffbilden som uppstår vid laserträff rakt framifrån. I Fawzys (2015) studie ökade standardosäkerheten från drygt 0 mm vid 0 infallsvinkel till cirka 6 mm vid 60, medan infallsvinkeln inte hade någon effekt när det gällde mätning mot prisma. Soudarissanane et al. (2009) redovisar överlag lägre osäkerhetstal men mätte ännu större infallsvinklar; vilket visade att osäkerheten ökade kraftigt efter ca 70. Lambrou och Pantazis (2010) samt Soudarissanane et al. (2009) kommer fram till att infallsvinkeln blir betydligt mer avgörande vid längre avstånd. Författarna använde i den förstnämnda studien instrumentet Leica TPS1200+, som har samma specifikationer när det gäller reflektorlös mätning som Leica TS15. Mätningarna gjordes på 15 respektive 50 m, och med två olika infallsvinklar på 0 (90 i artikeln) och 45. På 15-meters avstånd avvek mätningarna från de båda infallsvinklarna mot varandra med endast 0 1 mm beroende på ytmaterial, medan avvikelserna på 50 m var 1 8 mm. När det kommer till avvikelser från de korrekta värdena presterade mätningarna på 50-meters avstånd och infallsvinkeln 45 markant sämre än övriga mätningar. Både avstånd och infallsvinkel är avgörande faktorer för punktätheten vid terrester laserskanning. Punktmolnet blir glesare ju längre ifrån skannern som datainsamlingen sker samt ju större infallsvinkeln är (Reshetyuk, 2017). I ett exempel i Reshetyuk (2017) ökade punktavståndet från mm- till dm-nivå när avståndet steg från 5 till 50 meter. I exemplet var laserskannern uppställd på marknivå men om den skulle placeras på en högre höjd skulle infallsvinkeln minska och därmed också punkmolnet bli tätare. Reshetyuk (2017) påstår dock att detta är opraktiskt i de flesta fall och av just denna anledning rekommenderas UAS som insamlingsmetod för detaljerade markmodeller över medelstora områden. 8
16 Kowalczyk och Rapinski (2014) hävdar att på avstånd under 100 m blir de flesta av de redovisade avvikelserna mindre än vanliga mättoleranser, men att användaren framförallt bör undvika stora infallsvinklar. På grund av att mätningen sker från sidan av vägen och ner mot marken blir det dock mycket svårt att uppnå låg infallsvinkel. Om instrumentets höjd i ett realistiskt scenario för bekvämlighetens skull hamnar på 1,7 m, alltså ungefär i linje med mätarens ögon, blir infallsvinkeln för respektive avstånd följande: 71,2 (5 m), 80,4 (10 m), 85,1 (20 m), 88,1 (50 m). Mätosäkerheten kommer därför i samband med längre avstånd också att kraftigt påverkas av större infallsvinkel, vilket kommer att ytterligare försämra kvaliteten. Förutom högre mätosäkerhet blir därför relativt låg räckvidd en ytterligare nackdel för reflektorlös mätning. Enligt Lichti, Gordon och Tipdecho (2005, s. 139) är den teoretiska påverkan av infallsvinkel och stråldivergens följande: ρ = ρ δ 2 tan(90 φ) där ρ = avstånd; δ = stråldivergensvinkel i radianer; φ = infallsvinkel i grader (100 φ i gon). När reflektorlös mätning görs mot vegetationstäckt terräng innebär stora infallsvinklar att laserstrålen inte kan tränga igenom t.ex. grässtrån för att nå marken (Reshetyuk, 2017). Därför kan sådan mätning vara svår att utföra med exempelvis TLS medan mätning mot asfalterade ytor som vägar lämpar sig bättre. (5) 9

17 3 Metod 3.1 Studieområde Fältarbetet genomfördes på parkeringen utanför Furuviksparken (figur 1). Området är asfaltsbelagt och parkeringslinjerna utgörs av tydliga vita markeringar likt de som vanligtvis används för att markera väglinjer. Den yta som är markerad i figur 1 utgjorde kontrollytan och fick representera en rak vägsträcka. Dock har denna yta inte vissa typiska vägobjekt, som exempelvis kantsten, diken eller refuger. Denna studie har avgränsats till att endast undersöka en yta som representerar vägen utan omgivning. Sådana detaljer som befinner sig på sidorna av vägen kan likväl mätas in med prisma. Hammas (2016) producerade i ett examensarbete från föregående år en karta över Furuviksparken, inklusive parkeringen, med hjälp av UAS-fotogrammetri. Bilderna har gjorts tillgängliga för användning i denna studie, vilket möjliggör analys av UASfotogrammetri för skapande av markmodeller. Figur 1. Studieområdet (Furuviksparkens parkering) och kontrollytan (röd rektangel). 10

18 3.2 Instrument och programvaror För att uppnå studiens mål har mätningar med totalstation och laserskanner utförts (figur 2). Bearbetning och analys utfördes med programvarorna SBG Geo 2014 och 2016, Leica Cyclone 9.1 samt Agisoft PhotoScan Professional Edition ArcMap 10.5 användes för visualisering av vissa figurer. Totalstationen var av modell Leica TS15, lanserad Även om TS15 har efterträtts av TS16 skiljer sig inte specifikationerna mellan instrumenten med avseende på reflektorlös mätning, och förutom längre räckvidd gäller detta också Leicas mer avancerade totalstationer. TS15:s räckvidd på upp till 1200 m är dock tillräcklig för denna studies ändamål. Enligt Leica Geosystems (u.å.b) har TS15 en reflektorlös standardosäkerhet på 2 mm + 2 parts per million (ppm, vilket blir 2 mm/km) vid avstånd på under 500 m; och 4 mm + 2 ppm vid avstånd över 500 m. I jämförelse är standardosäkerheten vid mätning mot prisma 1,5 mm + 1 ppm. Stråldivergensvinkeln är 0,09 mrad (milliradianer). Laserskannern som användes var en Leica ScanStation C10, lanserad Den har en räckvidd på 300 m mot 100 % reflektans och 134 m mot 18 % reflektans. Upp till punkter kan mätas in per sekund och på avstånd mellan 1 och 50 m kan en standardosäkerhet i position på 6 mm uppnås. Stråldivergensvinkeln på 0,1 mrad är något större än hos TS15 (Leica Geosystems, u.å.a). Figur 2. Mätinstrumenten. Vänster: Leica ScanStation C10 laserskanner. Höger: Leica TS15 totalstation. 11
19 3.3 Datainsamling, bearbetning och beräkning Förberedande fältarbete För att kunna etablera instrumenten i ett lokalt koordinatsystem (X,Y,Z) skapades fyra referenspunkter väl spridda runt om i studieområdet (bilaga A), av vilka en punkt fick koordinaterna (1000, 1000, 10). Dessa markerades fysiskt genom markeringsspikar och från två olika uppställningar med totalstation gjordes sammanlagt fyra helsatsmätningar mot referenspunkterna. Inmätningen genomfördes med cirkelprisma på prismastång med en reflektorhöjd på 1,5 m samt stödben. I efterhand gjordes en fri nätutjämning i SBG Geo och referenspunkternas samt stationernas koordinater kunde preliminärt fastställas. Efterföljande tre etableringar mot referenspunkterna användes också vid en senare nätutjämning. Referenspunkternas slutgiltiga koordinater och osäkerhet redovisas i tabell 1. Samtliga etableringar (tabell 2) hade betydligt lägre osäkerhet än toleransen enligt HMK, som är 7 mm i plan och 5 mm i utjämnad höjd (HMK-Terrester detaljmätning, 2015). Tabell 1. Referenspunkternas koordinater efter nätutjämning i det lokala koordinatsystemet med utvidgad mätosäkerhet i meter (k = 2). Punkt X Y Z u(2d) u(z) u(3d) Ref , ,436 12,039 0,0012 0,0014 0,0018 Ref2 967, ,161 10,552 0,0011 0,0012 0,0016 Ref , ,000 10,000 0,0013 0,0006 0,0014 Ref , ,441 11,528 0,0014 0,0006 0,
20 Tabell 2. Stationsetableringarnas användning med utvidgad mätosäkerhet i meter (k = 2). RL = reflektorlöst. Station u(2d) u(z) u(3d) Inmätning Antal halvsatser Antal helsatser Prismatyp Referenspunkter - 2 Cirkel 1 0,0013 0,0006 0,0014 Stödpunkter - 2 Mini Kontrollpunkter - 1 Mini Referenspunkter - 2 Cirkel 2 0,0011 0,0006 0,0013 Stödpunkter - 2 Mini Kontrollpunkter - 1 Mini 3 0,0021 0,0010 0,0023 Referenspunkter 1 - Cirkel 4 0,0024 0,0010 0,0026 Referenspunkter 1 - Cirkel Referenspunkter 1 - Cirkel 5 0,0024 0,0010 0,0026 Sfärer - 2 RL Mittlinje 5 - RL Efter inmätning av referenspunkterna mättes fem naturliga stödpunkter in runt om och på kontrollytan med syfte att georeferera UAS-data till det lokala koordinatsystemet. Inmätningen av dessa stödpunkter gjordes också från två stationer och med två helsatser vardera. Samtliga punkter placerades i något hörn på parkeringslinjerna och syns tydligt i bilderna. För att underlätta korrekt placering användes miniprisma, som har en reflektorhöjd på endast 1 dm. Stödpunkternas koordinater och mätosäkerhet redovisas i tabell 3. Tabell 3. Stödpunkternas koordinater efter nätutjämning i det lokala koordinatsystemet med utvidgad mätosäkerhet i meter (k = 2). Punkt X Y Z u(2d) u(z) u(3d) Stöd , ,389 10,835 0,0013 0,0006 0,0014 Stöd , ,956 11,662 0,0014 0,0012 0,0019 Stöd , ,409 11,844 0,0014 0,0012 0,0019 Stöd , ,444 10,978 0,0013 0,0006 0,0014 Stöd , ,710 11,576 0,0013 0,0008 0,
21 Utöver stödpunkterna mättes 52 jämnt spridda punkter över kontrollytan (två på vardera sida av kontrollytan och två på vardera sida av mittlinjen) i form av 13 kontrollinjer med fyra punkter per linje och ett intervall på ca 5 m (figur 3). Syftet med punkterna var att kontrollera markmodeller av kontrollytan i höjd. Inmätningarna gjordes i en helsats och även här med miniprisma. Kontrollpunkternas koordinater och mätosäkerhet kan ses i bilaga B. Den utvidgade mätosäkerheten var som högst 2,5 mm i plan och 1,2 mm i höjd Laserskanning och reflektorlös mätning Det generella tillvägagångssättet i de tidigare studierna har varit att mäta mot olika material i ett labb under väldigt kontrollerade förhållanden. I denna studie utfördes dock mätningar under mer realistiska förhållanden i ett relativt naturligt scenario. Både totalstationen och laserskannern ställdes upp vid sidan om kontrollytan, ungefär vid samma position som en uppställning på en trottoar skulle ha gentemot vägen. Hela ytan laserskannades medan mittlinjen av ytan, som representerade en väglinje, användes för att utvärdera reflektorlös mätning med totalstation. Vid mättillfället var vädret molnigt och utan nederbörd (optimalt). Från en totalstationsuppställning med en instrumenthöjd på ca 1,6 m mättes 24 sektioner av väglinjen fem gånger reflektorlöst (figur 3). I Mårtensson (2016) rekommenderas minst fem observationer för att genomföra statistiska analyser. Avståndsintervallet mellan varje sektion var ca 2,5 m och avståndsintervallet mellan den första och den sista sektionen var ca 57,5 m. Sammanlagt gjordes 120 observationer (5 observationer per sektion längs väglinjen). I SBG Geo återskapades den ca 10 cm breda väglinjen genom sammankoppling av inmätta kontrollpunkter som var belägna på vardera sida längs väglinjens kontur (figur 3). Mittemellan de två återskapade konturlinjerna kunde en mittlinje projiceras och sedan fastställdes varje punkts höjdavvikelse samt planavvikelse ortogonalt från denna mittlinje. Med ortogonal avvikelse menas punktens avstånd från mittlinjen längs ett vinkelrät led som utgör den kortaste sträckan. Utifrån dessa avvikelser kunde standardosäkerhet (spridning av avvikelser), RMS samt medel- och maxavvikelse för varje sektion beräknas enligt ekvation
, kontrollpunkter samt kontrollinjer (A M).")
22 Figur 3. Instrument och mätobjekt. Vänster: Uppställningsplats för totalstation och inmätta sektioner (representeras av punkt 1 24). Höger: Uppställningsplats för laserskanner, kontrollytan (rektangel), kontrollpunkter samt kontrollinjer (A M). Med laserskannern utfördes två olika skanningar med punktavstånd på 1 cm på 15 respektive 30 m. För att kunna georeferera punkmolnet mättes fyra måltavlor (speciella halvsfärer) in med totalstation i två helsatser och finskannades med laserskannern, som hade en instrumenthöjd på ca 1,8 m. De två skanningarna georefererades med hjälp av sfärernas kända koordinater (tabell 4) i Leica Cyclone. Georefereringen fick en medelavvikelse på endast 0,001 m. Skanningarnas resultat exporterades till lämpligt format för vidare bearbetning i SBG Geo. Figur 3 visar uppställningsplats för totalstationen och inmätta sektioner samt laserskannerns uppställningsplats, kontrollytan och kontrollpunkter/-linjer. 15
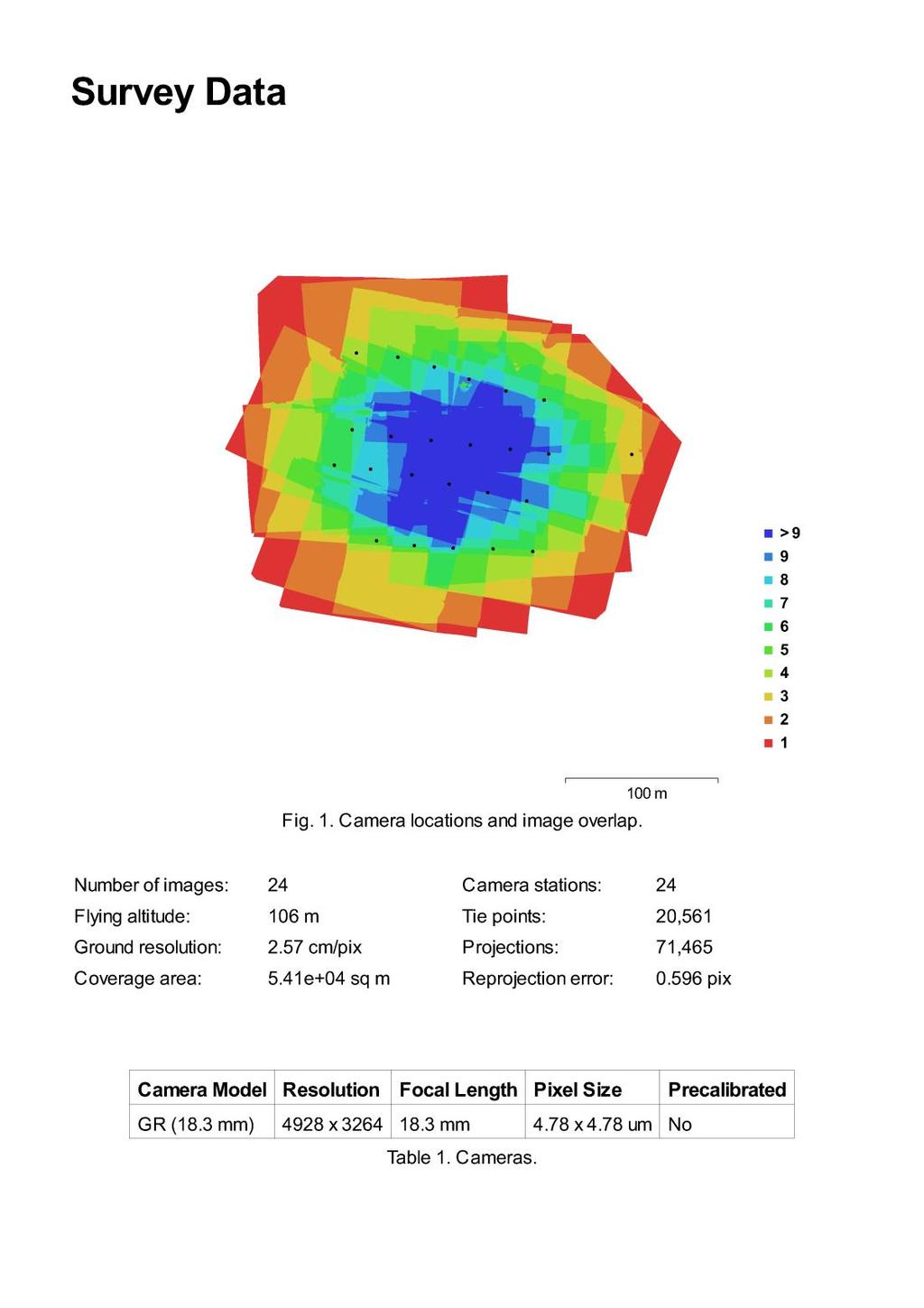
23 Tabell 4. Sfärernas koordinater efter nätutjämning i det lokala koordinatsystemet med utvidgad mätosäkerhet i meter (k = 2). Punkt X Y Z u(2d) u(z) u(3d) Sfär , ,793 11,576 0,0007 0,0004 0,0008 Sfär , ,570 12,416 0,0008 0,0004 0,0009 Sfär , ,410 12,325 0,0008 0,0004 0,0009 Sfär , ,165 13,010 0,0007 0,0004 0, UAS-bilder och fotogrammetri Till denna studie användes 24 flygbilder tagna över Furuviksparkens parkering. Flygbilderna har tagits med kameraintegrerad UAV i samarbete mellan Högskolan i Gävle och Metria Gävle (Hammas, 2016). Tekniska specifikationer hämtade från Hammas redovisas i bilaga C och innehåller information om UAV-modellen och kameran. Processen från flygbilder till ett georefererat punktmoln behandlades i programvaran PhotoScan och den resulterande rapporten återfinns i bilaga D. Den geometriska upplösningen kunde beräknas efter flygningen och uppnådde 2,57 cm/pixel. Geometrisk upplösning beskriver avståndet på marken i en digital flygbild mellan två närliggande pixel-centra. Den påverkar både tolkning av objekt i bilderna samt vilken mätosäkerhet som är möjlig att uppnå (HMK-Bilddata, 2015). Flyghöjden påverkar den geometriska upplösningen och bör anpassas efter toleranskraven redan i planeringsstadiet av inmätningen (HMK-Bilddata, 2015). En lägre flyghöjd ger högre geometrisk upplösning. Dock innebär det att datainsamlingen och bearbetningen tar längre tid eftersom det behövs fler bilder för att täcka samma område. Datamängden som måste lagras och hanteras blir dessutom också större. Den faktiska genomsnittliga flyghöjden för data som tilldelats hamnade på 106 m. Att ha överlapp (övertäckning) påverkar förmågan att kunna bestämma position och orientering mellan flygbilder samt möjligheten att kunna matcha ihop dem (bildmatchning) (HMK-Bilddata, 2015). Punktmoln och ytmodeller kan bildas genom bildmatchning om överlappet är tillräckligt, något som HMK-Bilddata (2015) uppger till 80 % i stråkled och 60 % i sidled. I Hammas (2016) planerades överlappet för att överrensstämma med detta. 16
24 För att genomföra bildmatchning tillämpas en metod som kallas blockutjämning (HMK-Bilddata, 2015). Det första steget i blockutjämningen var att låta programmet utföra en automatisk bildmatchning och skapa ett glest punkmoln med konnektionspunkter. I PhotoScan kallas detta att göra en Alignment, vilket har olika inställningar för Accuracy (noggrannhet) och Pair selection (sammankoppling). Noggrannheten kan ställas in på en skala från Low till Highest och anger vilken kvalitet bildpositioneringen resulterar i. En högre noggrannhet innebär ofta en längre processtid vilket gör att det lämpar sig bättre för små foto-set. Inställningen för sammankoppling av bilderna utgörs av två val: Reference och Generic; där Reference utgår från att bildernas positioner är kända medan det motsatta gäller Generic. Bildmatchningen genomfördes med High-noggrannhet och Generic-sammankoppling. Georeferering utfördes med hjälp av stödpunkterna i tabell 3 som markstöd. För att georeferera i PhotoScan placerar användaren manuellt ut markstöd i alla bilder där de syns. Detta innebär att markstöden behöver vara tydligt synliga för att underlätta utsättningen för användaren och minska storleken på avvikelser. När punkterna är placerade är modellen grovt georefererad och kan behöva finjusteras innan finanpassning. Det andra steget i blockutjämningen utfördes genom en funktion som kallas Optimize Cameras i PhotoScan. Optimeringen finanpassar bilderna mot varandra och förbättrar georefereringen. När blockutjämningen och georefereringen bedömdes vara av tillräcklig kvalitet (se bilaga D) genererades ett tätt punktmoln. Genereringen kan genomföras med olika inställningar för Quality (kvalitet) och Depth filtering (djupfiltrering). Kvaliteten kan ställas in på en skala från Lowest till Ultra High. Liksom för blockutjämningen påverkar även detta val processeringstiden. Med djupfiltrering kan punkter som bedöms inte tillhöra ytan elimineras. Det finns fyra inställningar för detta: Disabled, Mild, Moderate och Aggressive; där Disabled inte alls filtrerar bort detaljer som de tre resterande alternativen i olika omfattning gör. Kvaliteten sattes till High och djupfiltreringen sattes till Aggressive eftersom ytan är jämn och detaljfattig. Kontrollytan på 630 m 2 motsvarar en relativt liten del (17 %) av data som tilldelades och därför klipptes en mindre yta ut ur det glesa punktmolnet som skapades vid blockutjämningen. Detta gjordes för att underlätta hanteringen när punktmolnet exporterades till lämpligt format för vidare bearbetning i SBG Geo. 17
.")
25 3.3.4 Framställning och kontroll av markmodeller Punktmolnet från UAS-bilderna och de två punktmolnen från laserskanningarna importerades till SBG Geo och klipptes till samma utsträckning som kontrollytans area (figur 4). Punktmolnen konverterades sedan till koordinatfiler med utglesning på 0,1 meters avstånd mellan punkter och markmodeller skapades genom TINmodellering (triangular irregular network) från respektive koordinatfil. Markmodellerna kunde sedan kontrolleras med hjälp av kontrollpunkterna. Av de 52 kontrollpunkterna hamnade en utanför markmodellernas omfattning och kunde inte användas för analys. I SIS-TS 21144: står det bl.a. att höjdavvikelser för varje kontrollpunkt ska redovisas. Höjdavvikelserna framtogs enligt metoden i SIS-TS 21144: , dvs. genom att subtrahera kontrollpunkternas höjdvärden från markmodellens vid samma plankoordinater. Figur 4. Punktmolnen över kontrollytan (figur 1). Vänster: Punktmoln från TLS (punktäthet: 1 cm på 15 m). Höger: Punktmoln från UAS. 18
26 Vidare står det i SIS-TS 21144: att medelavvikelse, standardavvikelse (standardosäkerhet; avser spridningen av höjdavvikelser), max- och minavvikelse (största positiva respektive negativa avvikelsen) samt skillnaden mellan dem (variationsvidd) ska redovisas för varje kontrollprofil. I denna studie användes inte kontrollprofiler pga. den relativt lilla arealen som kontrollytan består av. Eftersom de 52 kontrollpunkterna utgör 13 kontrollinjer som är belägna allt längre ifrån laserskannerns position kan dessa linjer istället användas för att undersöka hur avvikelserna påverkas av avstånd samt infallsvinkel. Medelavvikelsen i höjd för respektive kontrollinje beräknades enligt ekvation 3 och ställdes mot toleranskravet på 0,02 m. Däremot beräknades (tillsammans med medelavvikelse) standardosäkerhet, max- och minavvikelse samt variationsvidd för markmodellen som helhet. Samtliga beräkningar utfördes för markmodellerna från punktmolnen från TLS samt UAS och i enlighet med SIS-TS 21144:
27 4 Resultat 4.1 Reflektorlös mätning mot väglinje I tabell 5 redovisas förhållandet mellan respektive sektion och totalstationen. Eftersom marken lutar nedåt från väglinjen är höjdskillnaden mellan totalstationen och den första sektionen lägre än instrumenthöjden (ca 1,5 kontra 1,6 m). Denna höjdskillnad minskar dock med totalt drygt 0,8 m i samband med avstånd längs väglinjen, vilket beror på att kontrollytan har en positiv lutning på 1,4 % från den första till den sista sektionen. Tabell 6 visar höga infallsvinklar som ökar från 78,65 m vid sektion 1 till 88,56 vid sektion 24. Det rör sig alltså endast om knappt 1,5 från rät vinkel. Eftersom att terrängen lutar uppåt blir mätytan något vinklad mot laserstrålen, vilket har kompenserats för i beräkningarna av infallsvinklar. Den teoretiska påverkan av infallsvinkeln (ekvation 5) redovisas också i tabell 6 och är på mm-nivå för sektion 1 6, cm-nivå för 7 17 och dm-nivå för Från och med sektion 22 började vissa av mätningarna få en för svag retur vilket innebar att fler mätningar fick utföras för att uppnå totalt fem observationer. Antalet observationer som hamnade utanför väglinjen (vars bredd är ca 10 cm) ökade också vid sektion 22. Vid sektion 24 fick färre än hälften av mätningarna retur och samtliga observationer hamnade utanför väglinjen. Av de 120 observationerna hamnade 119 på den bortre sidan av väglinjens mitt i förhållande till instrumentet. Sektionernas medel- och maxavvikelser i plan och höjd redovisas i figur 5 respektive 6. Avvikelserna i plan visar en tydlig trend av stadig ökning i samband med längre avstånd och större infallsvinkel. I höjd finns det inte en sådan trend men gemensamt för avvikelserna i plan och höjd är att de ökar drastiskt efter sektion 23. RMS och standardosäkerhet (utvidgad) i plan och höjd redovisas i figur 7 respektive 8. I både plan och höjd är standardosäkerheten betydligt lägre än RMS. Ökningen av RMS i plan liknar den trend som kan ses för medel- och maxavvikelser. Efter sektion 23 överstiger RMS i plan och höjd toleransgränsen på 0,05 respektive 0,02 m. 20
28 Tabell 5. De inmätta sektionerna och deras placering längs väglinjen samt horisontellt avstånd från- och vertikal skillnad mot instrumentet. Sektion Avstånd längs väglinje (m) Horisontell längd (m) Höjdskillnad (m) 1 0,0 7,398 1, ,5 7,840 1, ,0 8,969 1, ,5 10,593 1, ,0 12,503 1, ,5 14,597 1, ,0 16,798 1, ,5 19,068 1, ,0 21,391 1, ,5 23,752 1, ,0 26,139 1, ,5 28,544 1, ,0 30,965 1, ,5 33,400 0, ,0 35,843 0, ,5 38,292 0, ,0 40,745 0, ,5 43,204 0, ,0 45,665 0, ,5 48,127 0, ,0 50,596 0, ,5 53,072 0, ,0 55,550 0, ,5 58,031 0,635 21
29 Tabell 6. Resultat av de reflektorlösa mätningarna mot vägmitt. Sektion Antal returer Innanför väglinje Infallsvinkel ( ) Teoretisk påverkan av infallsvinkel (m) 1 5/5 5/5 78,65 0, /5 5/5 79,30 0, /5 5/5 80,66 0, /5 5/5 82,10 0, /5 5/5 83,31 0, /5 5/5 84,28 0, /5 5/5 85,03 0, /5 5/5 85,62 0, /5 5/5 86,10 0, /5 5/5 86,49 0, /5 5/5 86,81 0, /5 5/5 87,08 0, /5 5/5 87,30 0, /5 5/5 87,50 0, /5 5/5 87,67 0, /5 5/5 87,82 0, /5 5/5 87,95 0, /5 5/5 88,07 0, /5 5/5 88,17 0, /5 5/5 88,27 0, /5 5/5 88,35 0, /7 4/5 88,43 0, /8 4/5 88,50 0, /11 0/5 88,56 0,104 22
30 MEDEL- OCH MAXAVVIKELSE I HÖJD (M) MEDEL- OCH MAXAVVIKELSE I PLAN (M) Max avvikelse Medelavvikelse Linjär medelavvikelse 0,050 0,040 0,030 0,020 0,010 0, SEKTION Figur 5. Absolut medel- och maxavvikelse i plan baserat på fem observationer per sektion genom reflektorlös totalstationsmätning. Medelavvikelsen vid sektion 24 är 6,051 m. Maxavvikelsen vid sektion 22, 23 och 24 är 0,054; 0,057 respektive 6,068 m. Max avvikelse Medelavvikelse 0,020 0,015 0,010 0,005 0, SEKTION Figur 6. Absolut medel- och maxavvikelse i höjd baserat på fem observationer per sektion genom reflektorlös totalstationsmätning. Medel- och maxavvikelsen vid sektion 24 är 0,062 respektive 0,063 m. 23
31 MÄTOSÄKERHET I HÖJD (M) MÄTOSÄKERHET I PLAN (M) RMS Standardosäkerhet Toleransgräns 0,050 0,040 0,030 0,020 0,010 0, SEKTION Figur 7. RMS och utvidgad standardosäkerhet för planavvikelserna i meter (k = 2) i plan baserat på fem observationer per sektion genom reflektorlös totalstationsmätning. RMS vid sektion 24 är 6,051 m. 0,020 RMS Standardosäkerhet Toleransgräns 0,015 0,010 0,005 0, SEKTION Figur 8. RMS och utvidgad standardosäkerhet för höjdavvikelserna i meter (k = 2) i höjd baserat på fem observationer per sektion genom reflektorlös totalstationsmätning. RMS vid sektion 24 är 0,062 m. 24
32 MEDELAVVIKELSE (M) 4.2 Kvalitet av markmodeller Skillnaden mellan markmodellerna som utgick från en punkttäthet på 1 cm på 15- respektive 30-meters avstånd var minimal och därför presenteras i detta avsnitt endast den förstnämnda. Höjdavvikelserna vid varje kontrollpunkt redovisas i bilaga E. Tabell 7. Sammanfattning av kvaliteten av respektive markmodell i meter. Höjdavvikelsernas standardosäkerhet är utvidgad (k = 2). Figur 9 visar relativt stora skillnader i medelavvikelse mellan TLS och UAS vid varje kontrollinje (gruppering av 4 kontrollpunkter), där TLS har lägre medelavvikelser (förutom vid L). Båda mätmetoder håller sig dock inom toleranskraven i höjd (0,02 m) Maxavvikelse Minavvikelse Variationsvidd Standardosäkerhet 0,002-0,003 0,005 0,0021 0,015-0,003 0,018 0,0078 vid respektive kontrollinje. Avvikelserna hos TLS är relativt konstanta vid samtliga kontrollinjer medan de hos UAS varierar något mer. Tabell 7 sammanfattar kvaliteten på markmodellerna efter kontroll mot samtliga kontrollpunkter. TLS UAS Medelavvikelse -0,001 0,005 TLS UAS Toleransgräns 0,020 0,018 0,016 0,014 0,012 0,010 0,008 0,006 0,004 0,002 0,000 A B C D E F G H I J K L M KONTROLLINJE Figur 9. Absolut medelavvikelse i höjd för alla kontrollinjer (A M). 25
33 5 Diskussion Resultaten av denna studie visar att reflektorlös mätning med totalstation mot vägmitt har en tydlig gräns för godtagbara mätningar på ca 55-meters avstånd från instrumentet (sektion 23) eller 110 m längs vägen om mätningen sker i båda riktningarna. Inom detta avstånd erhölls mätosäkerheter (RMS) under toleransgränsen på 0,05 m i plan och 0,02 m i höjd. RMS ökar tydligare i samband med avstånd än vad standardosäkerheten gör och en relativt konstant differens i plan på 2 3 cm mellan värdena börjar vid sektion 11. Detta är en indikation på systematiska avvikelser. Att 119 av 120 observationer hamnade på den bortre delen av väglinjens mitt påvisar en förlängning av träffbilden som beror på den stora infallsvinkeln. Trots att den teoretiska påverkan av infallsvinkeln överstiger 5 cm vid sektion 17 (tabell 6), sker inte denna överträdelse förrän sektion 22. Punkternas placering kan också påverkas av en annan potentiell felkälla användarens förmåga att identifiera och sikta mot mitten av väglinjen, vilket blir allt svårare ju längre bort mätobjektet är. Användarens perspektiv påverkas då av kikarsiktets fokallängd och siktlinjens infallsvinkel. Vid sektion 22 och 23 fick inte alla mätningar tillräckligt stark retur för att kunna registreras. Det sökta antalet returer erhölls ändå efter upprepade försök och alla observationer utom en för respektive sektion hamnade innanför toleransgränsen i plan. De utstickande observationerna tyder på att enskilda mätningar som utförs reflektorlöst, på långt avstånd och med hög infallsvinkel kan få stora avvikelser. Maxavvikelsen överskred toleransgränsen men medelavvikelsen hamnade under, vilket innebär att överbestämning kan behövas på längre avstånd. Om beaktning tas till SIS-TS 21143: , som anger ett maximalt RMS på 40 % av inmätningstoleransen vid detaljmätning. uppnås toleranskravet istället fram till sektion 10 i plan respektive 12 i höjd. Räckvidden skulle därmed minska till ca 22,5 m istället. Vilka toleransgränser och riktlinjer som i praktiken efterföljs är dock inte entydigt och beroende på beställarens specifika krav kan andra räckvidder utläsas från resultatet. 26
34 Ute i fält kan det vara svårt att uppskatta infallsvinklar men användaren bör känna till att infallsvinkelns storlek beror på instrumentets höjd, vägens höjd och lutning samt det horisontella avståndet mellan instrumentet och mätytan. Kortare avstånd i plan och större höjdskillnad mellan instrument och väg innebär en mindre infallsvinkel och längre räckvidd (förutsatt att sikten är fri). Dessa förhållanden kan se väldigt annorlunda ut på olika platser beroende på bl.a. vägens utformning och skick, faktorer i omgivningen, trafikbelastning samt det rådande vädret. T.ex. kommer en uppställning på en trottoar ge större höjdskillnad mellan instrument och väg jämfört med denna studie där instrumentet var placerat i en nedåtlutning från väglinjen, vilket minskade höjdskillnaden en aning. Även vägens lutning kan variera stort. Fastän kontrollytan i denna studie lutade något blev skillnaderna i infallsvinklar minimala jämfört med en teoretiskt helt plan yta. Därför får lutningen på 1,4 % anses relativt plan men kraftigare lutningar uppåt eller nedåt kan dock ha större påverkan på träffbildens utbredning. Nedåtlutning förstorar fotavtrycket men innebär även att höjdskillnaden mellan instrument och mätobjekt ökar med avstånd, vilket till viss del kompenserar för detta. Förutom inriktning mot vägmitt behöver samtliga ovannämnda faktorer tas i beaktning även för TLS, som liksom UAS med fördel kan användas för att skapa markmodeller över asfaltsytor. Medelavvikelsen var -0,001 m för TLS och 0,005 m för UAS, vilket i bägge fall uppfyller toleranskraven i SIS-TS 21144:2016 på 0,02 m. I jämförelse blev medelavvikelsen i Hammas (2016) -0,006 m med UAS; om än med betydligt högre standardosäkerhet på 0,047 m. Standardosäkerheten i denna studie var 0,0021 m för TLS och 0,0078 m för UAS. Förbättringen i det här fallet förklaras av att kontrollytan består av ett homogent markslag, utan hinder som vegetation, och är relativt plan. Bättre förutsättningar för datainsamling ställs dock mot högre kvalitetskrav, vilket bl.a. asfaltsytor har jämfört med flera andra markslag i SIS-TS 21144:2016. Att uppmärksamma är att vägar generellt har fler detaljer än parkeringsytor, vilket kan vara av intresse att inkludera eller så behöver sådana detaljer filtreras bort vid databearbetningen. Punktätheten, träffbildens storlek och objektets intensitetsvärde avgör hur små detaljer som syns i punkmolnet. Till skillnad från TLS resulterar UAS i ett homogent punktmoln över terrängen. I programvaran Cyclone kunde intensitetsvärden för varje punkt i punktmolnen utläsas. Generellt hade punkterna på de vitmålade markeringarna intensitetsvärden på ca % medan punkterna på asfalten hade intensitetsvärden på omkring 20 %. Detta överensstämmer väldigt väl med reflektansvärdena som presenteras i avsnitt 2. I samband med avstånd sker dock en försvagning av intensitet från % till % och glesheten i punktmolnet gör det svårt att identifiera väglinjerna efter knappt halva sträckan från kontrollytans främre del. I punktmolnet skapat från UAS-data sker däremot ingen sådan försvagning av intensitet. 27
35 Medelavvikelsen i höjd för markmodellen från TLS-data påverkades inte nämnvärt av avståndet mellan instrument och kontrollinjer. Detta gällde trots att längre avstånd resulterar i lägre intensitet, glesare punktmoln och större träffbild. Punkttätheten som användes vid TLS (1 cm på 15 m) var alltså tillräcklig för att skapa en markmodell med låga avvikelser i höjd och låg standardosäkerhet; men om väglinjer behöver identifieras på längre avstånd eller om terrängen är mer detaljerad, kuperad eller ojämn kan det krävas högre täthet eller fler uppställningar. Om däremot större arealer behöver inskannas, utan hänsyn till synlighet av detaljer, men terrängen är lik kontrollytan i denna studie kan en mindre punkttäthet rekommenderas pga. datamängden och svårigheter för vissa programvaror att hantera detta. Att bestämma en lämplig upplösning gäller också för UAS och vidare behöver georeferering göras för båda metoderna. Att etablera och skanna in sfärer samt att hitta lämpliga naturliga stödpunkter eller placera ut specialtillverkade markstöd och utföra blockutjämning är tidskrävande åtgärder som måste beaktas. Tidsåtgången för georefereringen av UAS-bilderna var betydligt lägre än för punktmolnet från TLS, samtidigt som osäkerheten blev högre. Eftersom toleranskraven på punkter i kontrollprofiler uppfylls av reflektorlös totalstationsmätning på en räckvidd upp till ca 55 m är det en mätmetod som kan användas för att kontrollera markmodeller. TLS är också en lämplig metod för kontroll, inpassning eller komplettering av insamlingsmetoder som har högre mätosäkerhet och avvikelser, inklusive UAS-fotogrammetri. För samma ändamål kan UAS-fotogrammetri potentiellt användas på markmodeller skapade genom exempelvis satellitbilder eller flygburen fotogrammetri och laserskanning; metoder som generellt har en lägre geometrisk upplösning än UAS. 28
36 6 Slutsatser Reflektorlös totalstationsmätning mot väglinjer kan uppnå mätosäkerhet under 0,05 m i plan och 0,02 m i höjd på upp till 55-meters avstånd från instrumentet. Därför är det en mycket fördelaktig metod för inmätning av vägmitt vid exempelvis kontroll av markmodeller. För skapandet av markmodeller över asfaltsytor som just vägar lämpar sig både terrester laserskanning och UAS-fotogrammetri, som bägge uppfyller toleranskraven i SIS-TS 21144:2016 på 0,02 m i höjd. Indikationen utifrån den erhållna mätkvaliteten är att alla tre mätmetoder kan användas för insamling, kontroll, inpassning eller komplettering av markmodeller med avseende på vägar där totalstationsmätning mot prisma innebär risker för personer och trafik. Om längre vägsträckor avses kan UAS vara en gynnsam metod för skapande av markmodeller och präglas inte av de begränsningar som terrestra instrument uppvisar i samband med längre avstånd. TLS däremot ger istället lägre mätosäkerhet, kortare bearbetningstid och större flexibilitet i jämförelse med UAS. Inför mätning behöver hänsyn tas till respektive metods styrkor och svagheter samt aktuella toleranskrav, rådande förutsättningar och tillgängliga resurser. Eftersom mätmetoderna kompletterar varandra kan det i många fall vara optimalt att använda en kombination av dem. Slutsatsen är att en användning av dessa metoder skulle kunna ersätta traditionell mätning med handhållen prisma som innebär att mätaren måste befinna sig på vägen. Följden av detta blir ökad framkomlighet i en säkrare trafik, eliminerade kostnader för skyddsfordon, samt förbättrade arbetsförhållanden vid vägmätning. 29
37 7 Framtida studier Några intressanta spår för att bygga vidare på denna studie är: Utvärdering av reflektorlös mätning, laserskanning och fotogrammetri på olika markslag som exempelvis gräs och grus; Undersökning av mobil laserskanning på liknande sätt som gjordes för TLS och UAS; Jämförelse mellan UAS-laserskanning och UAS-fotogrammetri på olika markslag; Prövning av liknande mätningar med multistation. 30
38 Referenser Beshr, A. A., & Abo Elnaga, I. M. (2011). Investigating the accuracy of digital levels and reflectorless total stations for purposes of geodetic engineering. Alexandria Engineering Journal, 50(4), doi: /j.aej Fawzy, H. E-D. (2015). Evaluate the accuracy of reflector-less total station. International Journal of Civil Engineering and Technology (IJCIET), 6(3), Hammas, K. (2016). Framställning av primärkarta över Furuviks djurpark, Gävle, med hjälp av UAS. (Examensarbete, Högskolan i Gävle, Gävle). Hancock, J. (1999). Laser intensity-based obstacle detection and tracking. (Doktorsavhandling, Carnegie Mellon University, Pittsburgh, 15213). Herold, M. (2007). Spectral characteristics of asphalt road surfaces. I Weng, Q. (red.), Remote Sensing of Impervious Surfaces. (s ). Boca Raton: CRC Press. Hirt, C. (2015). Digital Terrain Models. Encyclopedia of Geodesy, 1-6. doi: / _31-1 HMK-Bilddata (2015). Handbok i mät- och kartfrågor, Geodatainsamling Bilddata. Gävle: Lantmäteriet. HMK-Geodatakvalitet (2015). Handbok i mät- och kartfrågor, Introduktion Geodatakvalitet. Gävle: Lantmäteriet. HMK-Laserdata (2015). Handbok i mät- och kartfrågor, Geodatainsamling Laserdata. Gävle: Lantmäteriet. HMK-Ordlista och förkortningar (2015). Handbok i mät- och kartfrågor, Introduktion Ordlista och förkortningar. Gävle: Lantmäteriet. HMK-Terrester detaljmätning (2015). Handbok i mät- och kartfrågor, Geodesi Terrester detaljmätning. Gävle: Lantmäteriet. HMK-Terrester laserskanning (2015). Handbok i mät- och kartfrågor, Geodatainsamling Terrester laserskanning. Gävle: Lantmäteriet. JCGM 100 (2008). Evaluation of measurement data Guide to the expression of uncertainty in measurement. Joint Committee for Guides in Metrology (JCGM/WG 1). Kerekes, J. P., Strackerjan, K-K., & Salvaggio, C. (2008). Spectral reflectance and emissivity of man-made surfaces contaminated with environmental effects. Optical Engineering, 47(10), doi: /
39 Kowalczyk, K., & Rapinski, J. (2014). Investigating the error sources in reflectorless EDM. Journal of Surveying Engineering, 140(4), doi: /(asce)su Lambrou, E., & Pantazis, G. (2010). Evaluation of the credibility of reflectorless distance measurement. Journal of Surveying Engineering, 136(4), doi: /(asce)su Lei, F., Powrie, W., Smethurst, J., Atkinson, P.M., & Einstein, H. (2013). The effect of short ground vegetation on terrestrial laser scans at a local scale. ISPRS Journal of Photogrammetry & Remote Sensing, 95, doi: /j.isprsjprs Leica Geosystems (u.å.a). Leica ScanStation C5/C10 User Manual (version 5.0). Leica Geosystems (u.å.b). Leica TS11/TS15 User Manual (version 2.0). Lichti, D. D., Gordon, S. J., & Tipdecho, T. (2005). Error models and propagation in directly georeferenced terrestrial laser scanner networks. Journal of Surveying Engineering, 131(4), doi: /(asce) (2005)131:4(135) Lichti, D. D., & Harvey, B. R. (2002). An investigation into the effects of reflecting surface material properties on terrestrial laser scanner measurements. Geomatics Research Australasia, 76, Mårtensson, S-G. (2016). Geodetisk mätning och beräkning (version ) [opublicerat kompendium]. Gävle: Högskolan i Gävle. Pfeifer N., Dorninger P., Haring A., & Fan, H. (2007). Investigating terrestrial laser scanning intensity data: Quality and functional relations. Konferensbidrag från 8th Conference on Optical 3-D Measurement Techniques, Zurich, Swcheiz, juli 9 12, 2007 (s ). Reshetyuk, Y. (2006). Investigation of the influence of surface reflectance on the measurements with the terrestrial laser scanner Leica HDS Zeitschrift für Geodäsie, Geoinformation und Landmanagement, 131(2), Reshetyuk, Y. (2012). Introduktion to Terrestrial Laser Scanning [opublicerat kompendium]. Gävle: Högskolan i Gävle. Reshetyuk, Y. (2017). Terrester laserskanning [elektronisk resurs]. Bookboon. Reshetyuk, Y., & Mårtensson, S-G. (2016). Noggrann och kostnadseffektiv uppdatering av DTM med laserskanning från UAS för BIM Läget 2015 (Publikationsnummer: 2016:067). Trafikverket. 32
40 Siebert, S., & Teizer, J. (2014). Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Automation in Construction, 41, doi: /j.autcon Soudarissanane, S., Lindenbergh, R., Menenti, M., & Teunissen, P. (2009). Incidence angle influence on the quality of terrestrial laser scanning points. I Bretar, F., Pierrot-Deseilligny, M., & Vosselman, G. (Red.), Konferensbidrag från Laserscanning 09, IAPRS, Vol. XXXVIII, Part 3/W8, Paris, Frankrike, september 1 2, 2009 (s ). SIS-TS 21143:2016. Byggmätning Geodetisk mätning, beräkning och redovisning av byggnadsverk och infrastruktur. Stockholm: SIS Förlag AB. SIS-TS 21144:2016. Byggmätning Specifikationer vid framställning och kontroll av digitala markmodeller. Stockholm: SIS Förlag AB. Trafikverket (2012). Trafikverkets tekniska råd avseende mätningsarbeten väg (Publikationsnummer 2012:059). Trafikverket (2014a). Dödsolyckor vid vägarbeten. En studie av trafikolyckor med dödlig utgångvid vägarbeten (Publikationsnummer 2014:128). Trafikverket (2014b). Trafikolyckor vid vägarbeten. En studie av trafikolyckor med personskador med speciellt fokus på olyckor som inträffat på kommunala vägar och gator. (Publikationsnummer 2014:075). Trafikverket (2014c). Trafikverkets tekniska krav för arbete på väg (Publikationsnummer 2012:86, version 3.0). Trafikverket (2016a). Geodetiska mätningsarbeten och geografisk lägesbestämning [krav] (Publikationsnummer 2014:0571, version 4.0). Trafikverket (2016b). Geodetiska mätningsarbeten och geografisk lägesbestämning [råd] (Publikationsnummer 2014:0572, version 2.0). Trafikverket (2016c). Trafikolyckor vid vägarbeten (Publikationsnummer 2016:122). Zámecníková, M., Wieser, A., Woschitz, H., & Ressl, C. (2014). Influence of surface reflectivity on reflectorless electronic distance measurement and terrestrial laser scanning. Journal of Applied Geodesy, 8(4), doi: /jag
, stödpunkter (Stöd1 5)")
41 Bilaga A Referenspunkter, stödpunkter och sfärer Figur 1. Bild över studieområdet med referenspunkter (Ref1 4), stödpunkter (Stöd1 5) och sfärer (Sfär1 4). A1
42 Bilaga B Kontrollpunkter Tabell 1. Kontrollpunkternas koordinater efter nätutjämning i det lokala koordinatsystemet med utvidgad mätosäkerhet i meter (k = 2). Punktnr X Y Z u(2d) u(z) u(3d) A1 1030, ,877 11,050 0,0025 0,0002 0,0026 A2 1029, ,670 11,176 0,0024 0,0002 0,0024 A3 1029, ,757 11,176 0,0024 0,0002 0,0024 A4 1028, ,543 11,055 0,0025 0,0002 0,0026 B1 1035, ,954 11,128 0,0024 0,0002 0,0024 B2 1034, ,740 11,240 0,0024 0,0002 0,0024 B3 1034, ,834 11,238 0,0024 0,0002 0,0024 B4 1033, ,606 11,114 0,0025 0,0002 0,0026 C1 1040, ,043 11,201 0,0024 0,0004 0,0024 C2 1039, ,817 11,316 0,0024 0,0004 0,0024 C3 1039, ,913 11,315 0,0024 0,0004 0,0024 C4 1038, ,686 11,185 0,0025 0,0004 0,0026 D1 1045, ,118 11,273 0,0024 0,0004 0,0024 D2 1044, ,887 11,383 0,0024 0,0004 0,0024 D3 1044, ,985 11,387 0,0024 0,0004 0,0024 D4 1043, ,759 11,269 0,0025 0,0004 0,0026 E1 1050, ,198 11,349 0,0024 0,0006 0,0025 E2 1049, ,974 11,454 0,0024 0,0006 0,0025 E3 1048, ,072 11,455 0,0024 0,0006 0,0025 E4 1047, ,845 11,342 0,0025 0,0006 0,0026 F1 1054, ,289 11,424 0,0024 0,0006 0,0025 F2 1053, ,053 11,532 0,0024 0,0006 0,0025 F3 1053, ,147 11,535 0,0024 0,0006 0,0025 F4 1052, ,929 11,426 0,0025 0,0006 0,0026 G1 1059, ,366 11,495 0,0024 0,0008 0,0025 G2 1058, ,142 11,613 0,0024 0,0008 0,0025 B1
43 Tabell 1 (forts.). Punktnr X Y Z u(2d) u(z) u(3d) G3 1058, ,231 11,615 0,0024 0,0008 0,0025 G4 1057, ,011 11,498 0,0025 0,0008 0,0027 H1 1064, ,451 11,571 0,0024 0,0008 0,0025 H2 1063, ,238 11,692 0,0024 0,0008 0,0025 H3 1063, ,327 11,694 0,0024 0,0008 0,0025 H4 1062, ,095 11,567 0,0025 0,0008 0,0027 I1 1069, ,522 11,655 0,0024 0,0010 0,0026 I2 1068, ,305 11,764 0,0024 0,0010 0,0026 I3 1068, ,402 11,767 0,0024 0,0010 0,0026 I4 1067, ,170 11,639 0,0025 0,0010 0,0027 J1 1074, ,600 11,725 0,0024 0,0010 0,0026 J2 1073, ,390 11,837 0,0024 0,0010 0,0026 J3 1073, ,486 11,839 0,0024 0,0010 0,0026 J4 1072, ,253 11,714 0,0025 0,0010 0,0027 K1 1079, ,687 11,781 0,0024 0,0012 0,0027 K2 1078, ,462 11,910 0,0024 0,0012 0,0027 K3 1078, ,559 11,914 0,0028 0,0012 0,0031 K4 1077, ,339 11,784 0,0025 0,0012 0,0028 L1 1084, ,766 11,830 0,0026 0,0012 0,0028 L2 1083, ,541 11,982 0,0028 0,0012 0,0031 L3 1083, ,638 11,985 0,0028 0,0012 0,0031 L4 1082, ,437 11,849 0,0025 0,0012 0,0028 M1 1089, ,841 11,874 0,0026 0,0012 0,0028 M2 1088, ,610 12,022 0,0024 0,0012 0,0027 M3 1088, ,708 12,024 0,0024 0,0012 0,0027 M4 1086, ,518 11,896 0,0024 0,0012 0,0027 B2
44 Bilaga C Tekniska specifikationer för UAS Tabell 1. Tekniska specifikationer för UAV-modellen och kameran (hämtad från Hammas, 2016). UAV-modell Kameratyp Fastvinge-flygplan (SmartOne C) från Smartplanes Batteritid: 30-35min Pentax Ricoh GR Fokallängd: 18,3 mm Megapixlar: 16 Pixelstorlek: 4,78 µm x 4,78 µm C1


45 Bilaga D Rapport från PhotoScan Figur 1. Ortofotomosaik. D1
46 Figur 2. Bildinsamlingsdata. D2
47 Figur 3. Kamerans kalibration. D3

48 Figur 4. Markstöd och beräknade fel (RMS). D4

49 Figur 5. DEM genererad från ortofotomosaiken. D5
Mät och Kart 2017 Noggrannheter UAS
 Noggrannheter UAS Anders Huhta Metria AB Metria rikstäckande mät- och konsultbolag. Vi är cirka 260 personer finns på 24 orter i Sverige. Metria är ett av landets ledande företag i branschen, vi kompetens
Noggrannheter UAS Anders Huhta Metria AB Metria rikstäckande mät- och konsultbolag. Vi är cirka 260 personer finns på 24 orter i Sverige. Metria är ett av landets ledande företag i branschen, vi kompetens
Faktorer som påverkar osäkerhet hos digitala terrängmodeller från UASdata
 Faktorer som påverkar osäkerhet hos digitala terrängmodeller från UASdata 2014-11-24 Yuriy Reshetyuk Stig-Göran Mårtensson Faktorer Matchningsalgoritmer Osäkerhet hos DTM Osäkerhet hos yttre orienteringsparametrar
Faktorer som påverkar osäkerhet hos digitala terrängmodeller från UASdata 2014-11-24 Yuriy Reshetyuk Stig-Göran Mårtensson Faktorer Matchningsalgoritmer Osäkerhet hos DTM Osäkerhet hos yttre orienteringsparametrar
Realtidsuppdaterad fristation
 Realtidsuppdaterad fristation Tillförlitlighetsanalys Juni 2011 Milan Horemuz Kungliga Tekniska högskolan, Institution för Samhällsplanering och miljö Avdelningen för Geodesi Teknikringen 72, SE 100 44
Realtidsuppdaterad fristation Tillförlitlighetsanalys Juni 2011 Milan Horemuz Kungliga Tekniska högskolan, Institution för Samhällsplanering och miljö Avdelningen för Geodesi Teknikringen 72, SE 100 44
Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning
 Fakulteten för humaniora och samhällsvetenskap Naturgeografi Magnus Wallsten Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning Comparison
Fakulteten för humaniora och samhällsvetenskap Naturgeografi Magnus Wallsten Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning Comparison
Tekniköversikt. Flygfoto och laserskanning Höjdmodeller, ortofoto och 3D-modeller
 Tekniköversikt Flygfoto och laserskanning Höjdmodeller, ortofoto och 3D-modeller Innehåll Teknik - Laserskanning / flygfotografering och bildmatchning - Georeferering Plattformar - Flygplan (FW - Fixed
Tekniköversikt Flygfoto och laserskanning Höjdmodeller, ortofoto och 3D-modeller Innehåll Teknik - Laserskanning / flygfotografering och bildmatchning - Georeferering Plattformar - Flygplan (FW - Fixed
Ny Nationell Höjdmodell (NNH)
") Ny Nationell Höjdmodell (NNH) Laserskanning (LiDAR) Aerial photo 3D-model of same area Graphics: DN/Stefan Rothmaier Den Nya Nationella Höjdmodellen (NNH) Framställs med hjälp av laserskanning Ger ett
Ny Nationell Höjdmodell (NNH) Laserskanning (LiDAR) Aerial photo 3D-model of same area Graphics: DN/Stefan Rothmaier Den Nya Nationella Höjdmodellen (NNH) Framställs med hjälp av laserskanning Ger ett
Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl december, 2012.
 FÖRSÄTTSBLAD Institutionen för Naturgeografi och Ekosystemvetenskaper Institutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 21 december, 2012. Denna tentamen
FÖRSÄTTSBLAD Institutionen för Naturgeografi och Ekosystemvetenskaper Institutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 21 december, 2012. Denna tentamen
HMK SyostGIS
 HMK 2014 SyostGIS 2014-11-11 C Bakgrund HMK HMK Handbok till Mätningskungörelsen gavs ut 1993-1995 Teknikbeskrivningar samt stöd för kvalitetskontroll och upphandling av mättjänster 9 delar HMK-Geodesi,
HMK 2014 SyostGIS 2014-11-11 C Bakgrund HMK HMK Handbok till Mätningskungörelsen gavs ut 1993-1995 Teknikbeskrivningar samt stöd för kvalitetskontroll och upphandling av mättjänster 9 delar HMK-Geodesi,
Metodbeskrivning RUFRIS
 Metodbeskrivning RUFRIS Dokumenttitel: Underlag till metodbeskrivning RUFRIS Skapat av: Johan Vium Andersson Dokumentdatum: 2012-03-16 Dokumenttyp: Rapport Publikationsnummer 2012:210 Version: 1,0 Publiceringsdatum:
Metodbeskrivning RUFRIS Dokumenttitel: Underlag till metodbeskrivning RUFRIS Skapat av: Johan Vium Andersson Dokumentdatum: 2012-03-16 Dokumenttyp: Rapport Publikationsnummer 2012:210 Version: 1,0 Publiceringsdatum:
Värnamo kommuns användning av drönare
 Värnamo kommuns användning av drönare Ortofoto Höjddata LAS Markmodell Exempel på Värnamo kommuns användningsområde av drönare Flygbild/ snedbild Underlag för 3Dmodeller Nybyggnads- Grundkarta Nybyggnadskarta
Värnamo kommuns användning av drönare Ortofoto Höjddata LAS Markmodell Exempel på Värnamo kommuns användningsområde av drönare Flygbild/ snedbild Underlag för 3Dmodeller Nybyggnads- Grundkarta Nybyggnadskarta
Leica ScanStation 2 En ny nivå för laserscanners ökad scanhastighet och mångsidighet
 Leica ScanStation 2 En ny nivå för laserscanners ökad scanhastighet och mångsidighet Med en förbättrad scanhastighet på upp till 10 gånger snabbare och friheten som totalstationsegenskaperna ger, lyfter
Leica ScanStation 2 En ny nivå för laserscanners ökad scanhastighet och mångsidighet Med en förbättrad scanhastighet på upp till 10 gånger snabbare och friheten som totalstationsegenskaperna ger, lyfter
Underlag till metodbeskrivning RUFRIS
 Uppdragsnr: 10141701 1 (7) PM Underlag till metodbeskrivning RUFRIS Upprättad av: Johan Vium Andersson, WSP Samhällsbyggnad 2011-11-09 WSP Samhällsbyggnad 121 88 Stockholm-Globen Besök: Arenavägen 7 Tel:
Uppdragsnr: 10141701 1 (7) PM Underlag till metodbeskrivning RUFRIS Upprättad av: Johan Vium Andersson, WSP Samhällsbyggnad 2011-11-09 WSP Samhällsbyggnad 121 88 Stockholm-Globen Besök: Arenavägen 7 Tel:
Drönare ett komplement till traditionell mätning
 Drönare ett komplement till traditionell mätning Tankegång Inför köp: - Ortofoto. - Höjddata och bilder för 3D-modell. Tillämpning 1 år efter inköp: (exempel) - Ortofoto bl. a. som projekteringsunderlag.
Drönare ett komplement till traditionell mätning Tankegång Inför köp: - Ortofoto. - Höjddata och bilder för 3D-modell. Tillämpning 1 år efter inköp: (exempel) - Ortofoto bl. a. som projekteringsunderlag.
En jämförelse mellan TLS och UAV-fotogrammetri
 ISRN UTH-INGUTB-EX-B 2015/10-SE Examensarbete 15 hp Juni 2015 En jämförelse mellan TLS och UAV-fotogrammetri Inmätning av hårdgjorda ytor Richard Paakkonen Lucas Cedergren ii ISRN UTH-INGUTB-EX-B 2015/10-SE
ISRN UTH-INGUTB-EX-B 2015/10-SE Examensarbete 15 hp Juni 2015 En jämförelse mellan TLS och UAV-fotogrammetri Inmätning av hårdgjorda ytor Richard Paakkonen Lucas Cedergren ii ISRN UTH-INGUTB-EX-B 2015/10-SE
Texturerade 3D-modeller
 Texturerade 3D-modeller från flygbilder och gatubilder Helén Rost Caroline Ivarsson (examensarbete 2014) Bakgrund 3D-modeller används idag allt oftare för att Visualisera Planera Utvärdera Kommunicera
Texturerade 3D-modeller från flygbilder och gatubilder Helén Rost Caroline Ivarsson (examensarbete 2014) Bakgrund 3D-modeller används idag allt oftare för att Visualisera Planera Utvärdera Kommunicera
Kvalitetskontroll laserscanning Göta- och Nordre älvs dalgångar
 Kvalitetskontroll laserscanning Göta- och Nordre älvs dalgångar Scanning utförd maj 2006 Mats Nyborg 2006-11-16 VATTENFALL POWER CONSULTANT Dokumenttyp Dokumentidentitet Rev. nr. Rapportdatum Uppdragsnummer
Kvalitetskontroll laserscanning Göta- och Nordre älvs dalgångar Scanning utförd maj 2006 Mats Nyborg 2006-11-16 VATTENFALL POWER CONSULTANT Dokumenttyp Dokumentidentitet Rev. nr. Rapportdatum Uppdragsnummer
Realtidsuppdaterad fristation
 Realtidsuppdaterad fristation Testmätningar BanaVäg i Väst April 2011 Milan Horemuz Kungliga Tekniska högskolan, Institution för Samhällsplanering och miljö Avdelningen för Geodesi och geoinformatik Teknikringen
Realtidsuppdaterad fristation Testmätningar BanaVäg i Väst April 2011 Milan Horemuz Kungliga Tekniska högskolan, Institution för Samhällsplanering och miljö Avdelningen för Geodesi och geoinformatik Teknikringen
Möjlig uppdatering av NVDB:s geometrier
 RAPPORT 9A Möjlig uppdatering av NVDB:s geometrier Jämförelse mellan NVDB och mobil laserskanning från ANDA Del av FoU-projektet Infrastruktur i 3D i samarbete mellan Innovation Norge, Trafikverket och
RAPPORT 9A Möjlig uppdatering av NVDB:s geometrier Jämförelse mellan NVDB och mobil laserskanning från ANDA Del av FoU-projektet Infrastruktur i 3D i samarbete mellan Innovation Norge, Trafikverket och
Utvärdering av vinkelmätningsosäkerheten hos terrester laserskanner FARO Focus 3D
 Utvärdering av vinkelmätningsosäkerheten hos terrester laserskanner FARO Focus 3D Stellan Dahl 2013 Examensarbete, 15 hp Lantmäteriteknik Lantmätarprogrammet Handledare: Yuriy Reshetyuk Examinator: Stig-Göran
Utvärdering av vinkelmätningsosäkerheten hos terrester laserskanner FARO Focus 3D Stellan Dahl 2013 Examensarbete, 15 hp Lantmäteriteknik Lantmätarprogrammet Handledare: Yuriy Reshetyuk Examinator: Stig-Göran
Realtidsuppdaterad fristation
 Precisionsanalys Januari 2009 Milan Horemuz Kungliga Tekniska högskolan, Institution för transporter och samhällsekonomi Avdelningen för Geodesi Teknikringen 72, SE 100 44 Stockholm e-post: horemuz@kth.se
Precisionsanalys Januari 2009 Milan Horemuz Kungliga Tekniska högskolan, Institution för transporter och samhällsekonomi Avdelningen för Geodesi Teknikringen 72, SE 100 44 Stockholm e-post: horemuz@kth.se
Ny nationell höjdmodell (NNH) Gävle kommun - användarerfarenheter
 Gävle kommun - användarerfarenheter") 2011-09-20 Ny nationell höjdmodell (NNH) Gävle kommun - användarerfarenheter Ungefär 1/3 av Gävles yta har skannats och materialet levererades i januari 2011. Innehåll: o Projekt - Nya nivåkurvor till
2011-09-20 Ny nationell höjdmodell (NNH) Gävle kommun - användarerfarenheter Ungefär 1/3 av Gävles yta har skannats och materialet levererades i januari 2011. Innehåll: o Projekt - Nya nivåkurvor till
Jämförelse av överlappande höjdmodeller
 L A N T M Ä T E R I E T 1 (10) PM Jämförelse av överlappande höjdmodeller 2011-07-01 Dnr Jämförelse av överlappande höjdmodeller Bakgrund Vid uppbyggnaden av Ny nationell höjdmodell kommer laserskanningen
L A N T M Ä T E R I E T 1 (10) PM Jämförelse av överlappande höjdmodeller 2011-07-01 Dnr Jämförelse av överlappande höjdmodeller Bakgrund Vid uppbyggnaden av Ny nationell höjdmodell kommer laserskanningen
Från laserdata till kvalitetsäkrad höjdmodell. Christofer Grandin. christofer.grandin@blomasa.com
 Från laserdata till kvalitetsäkrad höjdmodell Christofer Grandin christofer.grandin@blomasa.com Blom i Europa Blom-kontor (22st, ca 1 000 anställda ) Länder med Blom Pictometry snedbilder Från laserdata
Från laserdata till kvalitetsäkrad höjdmodell Christofer Grandin christofer.grandin@blomasa.com Blom i Europa Blom-kontor (22st, ca 1 000 anställda ) Länder med Blom Pictometry snedbilder Från laserdata
Lantmäteriets Nationella Höjdmodell
 Lantmäteriets Nationella Höjdmodell Uppbyggnad Produkter Användning Nya tjänster Kristina.kallur.jaderkvist@lm.se Klimat- och sårbarhetsutredningen Utredningen, SOU 2007:60, föreslog att: Lantmäteriet
Lantmäteriets Nationella Höjdmodell Uppbyggnad Produkter Användning Nya tjänster Kristina.kallur.jaderkvist@lm.se Klimat- och sårbarhetsutredningen Utredningen, SOU 2007:60, föreslog att: Lantmäteriet
Uppdatering av nationella höjdmodellen över begränsade områden med hjälp av UAS
 Uppdatering av nationella höjdmodellen över begränsade områden med hjälp av UAS Emma Hedqvist Daniel Jakobsson 2016 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik Handledare: Stig-Göran Mårtensson
Uppdatering av nationella höjdmodellen över begränsade områden med hjälp av UAS Emma Hedqvist Daniel Jakobsson 2016 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik Handledare: Stig-Göran Mårtensson
Produktbeskrivning: Höjdmodell Visning
 1(11) D atum: D ok umentversion: A vser tjänstens gränssnittsversion: 2014-12-12 1.0 1.0 Produktbeskrivning: Höjdmodell Visning Förändringsförteckning Innehållsförteckning 1 Allmän beskrivning... 2 1.1
1(11) D atum: D ok umentversion: A vser tjänstens gränssnittsversion: 2014-12-12 1.0 1.0 Produktbeskrivning: Höjdmodell Visning Förändringsförteckning Innehållsförteckning 1 Allmän beskrivning... 2 1.1
Lutning och Buktningskontroll av horisontell yta med geodetiska mätinstrument
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Lutning och Buktningskontroll av horisontell yta med geodetiska mätinstrument Hugo Ekelund och Joakim Gustavar
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Lutning och Buktningskontroll av horisontell yta med geodetiska mätinstrument Hugo Ekelund och Joakim Gustavar
OBS: Alla mätningar och beräknade värden ska anges i SI-enheter med korrekt antal värdesiffror. Felanalys behövs endast om det anges i texten.
 Speed of light OBS: Alla mätningar och beräknade värden ska anges i SI-enheter med korrekt antal värdesiffror. Felanalys behövs endast om det anges i texten. 1.0 Inledning Experiment med en laseravståndsmätare
Speed of light OBS: Alla mätningar och beräknade värden ska anges i SI-enheter med korrekt antal värdesiffror. Felanalys behövs endast om det anges i texten. 1.0 Inledning Experiment med en laseravståndsmätare
HMK. Lägesosäkerhet vid fotogrammetrisk detaljmätning i 3D. Clas-Göran Persson. Teknisk rapport 2013:3. handbok i mät- och kartfrågor
 HMK handbok i mät- och kartfrågor Lägesosäkerhet vid fotogrammetrisk detaljmätning i 3D Clas-Göran Persson Teknisk rapport 2013:3 Förord/Sammanfattning Denna rapport innehåller en analys av examensarbetet
HMK handbok i mät- och kartfrågor Lägesosäkerhet vid fotogrammetrisk detaljmätning i 3D Clas-Göran Persson Teknisk rapport 2013:3 Förord/Sammanfattning Denna rapport innehåller en analys av examensarbetet
Laserskanning. Lars Harrie, Lunds universitet. Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet
 Laserskanning Lars Harrie, Lunds universitet Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet Innehåll 1. Introduktion 2. Grundläggande teknik för flygburen laserskanning 3. Data från flygburen
Laserskanning Lars Harrie, Lunds universitet Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet Innehåll 1. Introduktion 2. Grundläggande teknik för flygburen laserskanning 3. Data från flygburen
EXAMENSARBETE. Totalstation jämförd med mmgps. David Olsson. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Totalstation jämförd med mmgps David Olsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Totalstation jämförd med mmgps
EXAMENSARBETE Totalstation jämförd med mmgps David Olsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Totalstation jämförd med mmgps
Innehåll. Bestämning av ojämnheter VV Publ. nr 2001:29 och tvärfall med rätskiva VVMB 107
 Bestämning av ojämnheter VV Publ. nr 2001:29 1 Innehåll 1 Orientering... 3 2 Sammanfattning... 3 3 Utrustning... 3 4 Utförande... 4 4.1 Fördelning av stickprovets kontrollpunkter... 4 4.2 Utsättning av
Bestämning av ojämnheter VV Publ. nr 2001:29 1 Innehåll 1 Orientering... 3 2 Sammanfattning... 3 3 Utrustning... 3 4 Utförande... 4 4.1 Fördelning av stickprovets kontrollpunkter... 4 4.2 Utsättning av
INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ. Framställning av digitala terrängmodeller med totalstation respektive terrester laserskanner
 INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ Framställning av digitala terrängmodeller med totalstation respektive terrester laserskanner Marcel Bolohan Juni 2009 Examensarbete 15 hp B-nivå Geomatik Geomatikprogrammet
INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ Framställning av digitala terrängmodeller med totalstation respektive terrester laserskanner Marcel Bolohan Juni 2009 Examensarbete 15 hp B-nivå Geomatik Geomatikprogrammet
INFALLSVINKELNS PÅVERKAN PÅ MÄTRESULTATET VID TERRESTER LASERSKANNING Undersökning av ScanStation 2
 INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ INFALLSVINKELNS PÅVERKAN PÅ MÄTRESULTATET VID TERRESTER LASERSKANNING Undersökning av ScanStation 2 Andreas Berg och Niklas Hermansson Juni 2009 Examensarbete 15
INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ INFALLSVINKELNS PÅVERKAN PÅ MÄTRESULTATET VID TERRESTER LASERSKANNING Undersökning av ScanStation 2 Andreas Berg och Niklas Hermansson Juni 2009 Examensarbete 15
1 (9) Version 1.0 ERFARENHETER OCH PRAKTISKA RÅD VID ANVÄNDNING AV NNH (BILAGA TILL PRODUKTBESKRIVNING)
 Version 1.0 ERFARENHETER OCH PRAKTISKA RÅD VID ANVÄNDNING AV NNH (BILAGA TILL PRODUKTBESKRIVNING)") L A N T M Ä T E R I E T 1 (9) ERFARENHETER OCH PRAKTISKA RÅD VID ANVÄNDNING AV NNH (BILAGA TILL PRODUKTBESKRIVNING) 2011-11-04 Version 1.0 Bakgrund Lantmäteriets laserskanning av landet resulterar i en
L A N T M Ä T E R I E T 1 (9) ERFARENHETER OCH PRAKTISKA RÅD VID ANVÄNDNING AV NNH (BILAGA TILL PRODUKTBESKRIVNING) 2011-11-04 Version 1.0 Bakgrund Lantmäteriets laserskanning av landet resulterar i en
Bildbaserad skanning och laserskanning av kulturhistoriska byggnader
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Bildbaserad skanning och laserskanning av kulturhistoriska byggnader En fallstudie på gasklockorna i Gävle Andreas
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Bildbaserad skanning och laserskanning av kulturhistoriska byggnader En fallstudie på gasklockorna i Gävle Andreas
ÅF Mät & Kartteknik. Lennart Gimring
 M ÅF Mät & Kartteknik Mät/Kart&Geodesidagarna 2017 Lennart Gimring 1 ÅF Mät & Kartteknik 30-35 personer med olika bakgrunder; Tekniska lantmätare, mätnings-, maskin-, GIS- och CAD-ingenjörer. Bred och
M ÅF Mät & Kartteknik Mät/Kart&Geodesidagarna 2017 Lennart Gimring 1 ÅF Mät & Kartteknik 30-35 personer med olika bakgrunder; Tekniska lantmätare, mätnings-, maskin-, GIS- och CAD-ingenjörer. Bred och
RAPPORT. Höjdmätning med RUFRIS
 RAPPORT Höjdmätning med RUFRIS Trafikverket Postadress: Rödavägen 1, 781 89 Borlänge E-post: trafikverket@trafikverket.se Telefon: 0771-921 921 TMALL 0004 Rapport generell v 2.0 Dokumenttitel: Höjdmätning
RAPPORT Höjdmätning med RUFRIS Trafikverket Postadress: Rödavägen 1, 781 89 Borlänge E-post: trafikverket@trafikverket.se Telefon: 0771-921 921 TMALL 0004 Rapport generell v 2.0 Dokumenttitel: Höjdmätning
Leica FlexField plus & Leica FlexOffice Ett perfekt par
 Leica FlexField & Leica FlexOffice Ett perfekt par FlexField mjukvara Generellt Filhantering Dataimport Dataexport Statusikoner Instrumentet Skyddat med PIN Utsättning m. ljud Val i karta Program TPS etablering
Leica FlexField & Leica FlexOffice Ett perfekt par FlexField mjukvara Generellt Filhantering Dataimport Dataexport Statusikoner Instrumentet Skyddat med PIN Utsättning m. ljud Val i karta Program TPS etablering
Karta över Furuviksparken
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Karta över Furuviksparken Kontroll enligt HMK:s gamla och nya dokument samt dokument från Norge och Finland
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Karta över Furuviksparken Kontroll enligt HMK:s gamla och nya dokument samt dokument från Norge och Finland
- Information som ska ingå i Digital Samhällsbyggnadsprocess. Höjd och djup
 - Information som ska ingå i Digital Samhällsbyggnadsprocess OM DOKUMENTET Höjd och djup Vad är detta? Det här dokumentet innehåller en lista över den information som är tänkt att ingå i Digital Samhällsbyggnadsprocess
- Information som ska ingå i Digital Samhällsbyggnadsprocess OM DOKUMENTET Höjd och djup Vad är detta? Det här dokumentet innehåller en lista över den information som är tänkt att ingå i Digital Samhällsbyggnadsprocess
Föreläsning 7: Antireflexbehandling
 1 Föreläsning 7: Antireflexbehandling När strålar träffar en yta vet vi redan hur de bryts (Snells lag) eller reflekteras (reflektionsvinkeln lika stor som infallsvinkeln). Nu vill vi veta hur mycket som
1 Föreläsning 7: Antireflexbehandling När strålar träffar en yta vet vi redan hur de bryts (Snells lag) eller reflekteras (reflektionsvinkeln lika stor som infallsvinkeln). Nu vill vi veta hur mycket som
Utvärdering av lägesosäkerheter i ortofoton framtagna med hjälp av DJI Phantom 4 RTK
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för datavetenskap och samhällsbyggnad Utvärdering av lägesosäkerheter i ortofoton framtagna med hjälp av DJI Phantom 4 RTK Johan Larsson och Marcus Stark 2019
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för datavetenskap och samhällsbyggnad Utvärdering av lägesosäkerheter i ortofoton framtagna med hjälp av DJI Phantom 4 RTK Johan Larsson och Marcus Stark 2019
Optimering av datainsamling med UAS
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för datavetenskap och samhällsbyggnad Optimering av datainsamling med UAS En studie i alternativa flyghöjder kontra mätosäkerheter utförd i Avesta Sandra Hägglund
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för datavetenskap och samhällsbyggnad Optimering av datainsamling med UAS En studie i alternativa flyghöjder kontra mätosäkerheter utförd i Avesta Sandra Hägglund
Norsecraft Geo Position AB Specialister på precision, vi leverera rätt system till rätt pris.
 Norsecraft Geo Position AB Specialister på precision, vi leverera rätt system till rätt pris. Massdata capture Geoslam Simultaneous Localization and Mapping. SLAM Starta mätning med Zeb Horizon Inmätning
Norsecraft Geo Position AB Specialister på precision, vi leverera rätt system till rätt pris. Massdata capture Geoslam Simultaneous Localization and Mapping. SLAM Starta mätning med Zeb Horizon Inmätning
Publikation 1994:40 Mätning av tvärfall med mätbil
 Publikation 1994:40 Mätning av tvärfall med mätbil Metodbeskrivning 109:1994 1. Orientering... 3 2. Sammanfattning... 3 3. Begrepp... 3 3.1 Benämningar... 3 4. Utrustning... 4 4.1 Mätfordon... 4 4.2 Utrustning
Publikation 1994:40 Mätning av tvärfall med mätbil Metodbeskrivning 109:1994 1. Orientering... 3 2. Sammanfattning... 3 3. Begrepp... 3 3.1 Benämningar... 3 4. Utrustning... 4 4.1 Mätfordon... 4 4.2 Utrustning
Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl december, 2012.
 FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 21 december, 2012. Denna tentamen
FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 21 december, 2012. Denna tentamen
Vad är rätt och vad är fel?
 Vad är rätt och vad är fel? Inledning - Mikael Lilje, Lantmäteriet I vår verksamhet ingår troligen att vi utnyttjar inmätt geografisk information. För att kunna hantera informationen på ett så korrekt
Vad är rätt och vad är fel? Inledning - Mikael Lilje, Lantmäteriet I vår verksamhet ingår troligen att vi utnyttjar inmätt geografisk information. För att kunna hantera informationen på ett så korrekt
Detaljmätning med terrester fotogrammetri
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Detaljmätning med terrester fotogrammetri Med smartphone, bildrover och multistation Johannes Nyström & Hampus
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Detaljmätning med terrester fotogrammetri Med smartphone, bildrover och multistation Johannes Nyström & Hampus
Erfarenheter av drönare och bearbetning av data inom tillämpningsområdet georisker
 1 Erfarenheter av drönare och bearbetning av data inom tillämpningsområdet georisker 1 Mats Öberg, GIS-arkitekt, SGI Geoforum Sverige 23 jan 2018 L:\GIS_arb\teknik\dronare2017\föredrag_ULI_Geoforum_23jan18
1 Erfarenheter av drönare och bearbetning av data inom tillämpningsområdet georisker 1 Mats Öberg, GIS-arkitekt, SGI Geoforum Sverige 23 jan 2018 L:\GIS_arb\teknik\dronare2017\föredrag_ULI_Geoforum_23jan18
Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst
 Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst I denna checklista redovisas en del allmänna råd angående hur nätverks-rtk-tekniken bör användas för att uppnå ett tillfredställande
Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst I denna checklista redovisas en del allmänna råd angående hur nätverks-rtk-tekniken bör användas för att uppnå ett tillfredställande
HMK. Remissversion. Terrester laserskanning. handbok i mät- och kartfrågor
 HMK handbok i mät- och kartfrågor Remissversion Terrester laserskanning 2015 Innehållsförteckning 1 Inledning... 4 2 Teknisk specifikation... 6 2.1 Allmän beskrivning... 6 2.2 Specifikation av arbetets
HMK handbok i mät- och kartfrågor Remissversion Terrester laserskanning 2015 Innehållsförteckning 1 Inledning... 4 2 Teknisk specifikation... 6 2.1 Allmän beskrivning... 6 2.2 Specifikation av arbetets
4 Geografisk information
 Stadsbyggnadsnämndens avgifter och taxor 2018-10-01 4 Geografisk information Kommunens produktion av geografisk information finansieras via både skatter och avgifter (nyttjanderättsavgifter) och är upphovsrättsligt
Stadsbyggnadsnämndens avgifter och taxor 2018-10-01 4 Geografisk information Kommunens produktion av geografisk information finansieras via både skatter och avgifter (nyttjanderättsavgifter) och är upphovsrättsligt
Ny Nationell Höjdmodell
 Ny Nationell Höjdmodell Janos Böhm Anpassning till ett förändrat klimat 2010-04-21/22 Malmö Ny nationell höjdmodell Klimat- och sårbarhetsutredningen föreslår i sitt betänkande (SOU 2007:60) att Lantmäteriet
Ny Nationell Höjdmodell Janos Böhm Anpassning till ett förändrat klimat 2010-04-21/22 Malmö Ny nationell höjdmodell Klimat- och sårbarhetsutredningen föreslår i sitt betänkande (SOU 2007:60) att Lantmäteriet
Framställning av en digital höjdmodell över Storsjö strand i Östersund
 Framställning av en digital höjdmodell över Storsjö strand i Östersund Martin Elofsson och Fredrik Öberg 2011 Examensarbete, högskolenivå, 7,5 hp Geomatik Geomatikprogrammet Handledare: Stig-Göran Mårtensson
Framställning av en digital höjdmodell över Storsjö strand i Östersund Martin Elofsson och Fredrik Öberg 2011 Examensarbete, högskolenivå, 7,5 hp Geomatik Geomatikprogrammet Handledare: Stig-Göran Mårtensson
Laserskanning. Lars Harrie, Lunds universitet. Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet
 Laserskanning Lars Harrie, Lunds universitet Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet 1. Introduktion Innehåll 2. Grundläggande teknik för flygburen laserskanning 3. Data från flygburen
Laserskanning Lars Harrie, Lunds universitet Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet 1. Introduktion Innehåll 2. Grundläggande teknik för flygburen laserskanning 3. Data från flygburen
FÖRSÄTTSBLAD. Rättningsmall fråga 1-4 för tentamen EXTA50 Samhällsmätning, 9 hp, kl januari, 2019.
 FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Rättningsmall fråga 1-4 för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 15 januari, 2019.
FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Rättningsmall fråga 1-4 för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 15 januari, 2019.
Mätosäkerhet vid digital terrängmodellering med handhållen laserskanner
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Mätosäkerhet vid digital terrängmodellering med handhållen laserskanner Undersökning av den handhållna laserskannern
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Mätosäkerhet vid digital terrängmodellering med handhållen laserskanner Undersökning av den handhållna laserskannern
Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl januari, 2017.
 FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 10 januari, 2017. Denna tentamen
FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 10 januari, 2017. Denna tentamen
Föreläsning 7: Antireflexbehandling
 1 Föreläsning 7: Antireflexbehandling När strålar träffar en yta vet vi redan hur de bryts (Snells lag) eller reflekteras (reflektionsvinkeln lika stor som infallsvinkeln). Nu vill vi veta hur mycket som
1 Föreläsning 7: Antireflexbehandling När strålar träffar en yta vet vi redan hur de bryts (Snells lag) eller reflekteras (reflektionsvinkeln lika stor som infallsvinkeln). Nu vill vi veta hur mycket som
Utvärdering av terrester laserskanning som metod vid exteriör dokumentation av Hälsingegårdar
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Utvärdering av terrester laserskanning som metod vid exteriör dokumentation av Hälsingegårdar Sofie Classon
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Utvärdering av terrester laserskanning som metod vid exteriör dokumentation av Hälsingegårdar Sofie Classon
HMK - handbok i mät- och kartfrågor HMK. Anders Grönlund Lantmäteriet. Introduktion HMK
 HMK - handbok i mät- och kartfrågor HMK Anders Grönlund Lantmäteriet Introduktion HMK C Bakgrund HMK HMK Handbok till Mätningskungörelsen gavs ut 1993-1995 Teknikbeskrivningar samt stöd för kvalitetskontroll
HMK - handbok i mät- och kartfrågor HMK Anders Grönlund Lantmäteriet Introduktion HMK C Bakgrund HMK HMK Handbok till Mätningskungörelsen gavs ut 1993-1995 Teknikbeskrivningar samt stöd för kvalitetskontroll
HMK. Teknisk rapport 2018:1 Mät- och lägesosäkerhet vid geodatainsamling en lathund. Clas-Göran Persson. handbok i mät- och kartfrågor
 HMK handbok i mät- och kartfrågor handbok i mät- och kartfrågor Mät- och lägesosäkerhet vid geodatainsamling en lathund Clas-Göran Persson Författarens kontaktuppgifter Clas-Göran Persson Skansstigen 3
HMK handbok i mät- och kartfrågor handbok i mät- och kartfrågor Mät- och lägesosäkerhet vid geodatainsamling en lathund Clas-Göran Persson Författarens kontaktuppgifter Clas-Göran Persson Skansstigen 3
Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl december, 2013.
 FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 20 december, 2013. Denna tentamen
FÖRSÄTTSBLAD I nstitutionen för Naturgeografi och Ekosystemvetenskaper I nstitutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 20 december, 2013. Denna tentamen
4/29/2011. Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl maj, 2011.
 FÖRSÄTTSBLAD 4/29/2011 Institutionen för Geo- och Ekosystemvetenskaper Institutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 2 maj, 2011. Besvara frågor till
FÖRSÄTTSBLAD 4/29/2011 Institutionen för Geo- och Ekosystemvetenskaper Institutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 2 maj, 2011. Besvara frågor till
Utvärdering av metoder för framställning och kontroll av digitala terrängmodeller
 Utvärdering av metoder för framställning och kontroll av digitala terrängmodeller Erik Persson & Fredric Sjöwall 2012 Examensarbete, Kandidatnivå, 15 hp Lantmäteriteknik Handledare: Yuriy Reshetyuk Examinator:
Utvärdering av metoder för framställning och kontroll av digitala terrängmodeller Erik Persson & Fredric Sjöwall 2012 Examensarbete, Kandidatnivå, 15 hp Lantmäteriteknik Handledare: Yuriy Reshetyuk Examinator:
Föreläsning 2 (kap , 2.6 i Optics)
") 5 Föreläsning 2 (kap 1.6-1.12, 2.6 i Optics) Optiska ytor Vad händer med ljusstrålarna när de träffar en gränsyta mellan två olika material? Strålen in mot ytan kallas infallande ljus och den andra strålen
5 Föreläsning 2 (kap 1.6-1.12, 2.6 i Optics) Optiska ytor Vad händer med ljusstrålarna när de träffar en gränsyta mellan två olika material? Strålen in mot ytan kallas infallande ljus och den andra strålen
Uppgifter. Uppgifter. Uppgift 2. Uppgift 1
 Uppgift 1 Uppgift 2 Det första målet är att beräkna vinkeldiametern på ringen, det vill säga ringens apparenta diameter sedd från jorden i bågsekunder. Detta är vinkel a. De relativa positionerna för stjärnorna
Uppgift 1 Uppgift 2 Det första målet är att beräkna vinkeldiametern på ringen, det vill säga ringens apparenta diameter sedd från jorden i bågsekunder. Detta är vinkel a. De relativa positionerna för stjärnorna
λ = T 2 g/(2π) 250/6 40 m
 250/6 40 m") Problem. Utbredning av vattenvågor är komplicerad. Vågorna är inte transversella, utan vattnet rör sig i cirklar eller ellipser. Våghastigheten beror bland annat på hur djupt vattnet är. I grunt vatten
Problem. Utbredning av vattenvågor är komplicerad. Vågorna är inte transversella, utan vattnet rör sig i cirklar eller ellipser. Våghastigheten beror bland annat på hur djupt vattnet är. I grunt vatten
Höga vattenflöden/las-data/kris-gis. Mora Ulf Henriksson, Falu kn Lars Robertsson, Borlänge kn
 Höga vattenflöden/las-data/kris-gis Mora 2016-03-10 Ulf Henriksson, Falu kn Lars Robertsson, Borlänge kn Fakta om laserskanning NNH, Ny Nationell Höjdmodell Laserskanning utförs från flygplan och ger laserdata
Höga vattenflöden/las-data/kris-gis Mora 2016-03-10 Ulf Henriksson, Falu kn Lars Robertsson, Borlänge kn Fakta om laserskanning NNH, Ny Nationell Höjdmodell Laserskanning utförs från flygplan och ger laserdata
Laserdata till Orienteringskartor
 2011-05-15 Laserdata till Orienteringskartor Jerker Boman, Gävle Orienterings Klubb Sammanfattning Gävle Orienterings Klubb beslutade tidigt att undersöka hur Laserdata från NNH projektet skulle kunna
2011-05-15 Laserdata till Orienteringskartor Jerker Boman, Gävle Orienterings Klubb Sammanfattning Gävle Orienterings Klubb beslutade tidigt att undersöka hur Laserdata från NNH projektet skulle kunna
Utvärdering av höjdosäkerheten i digitala höjdmodeller framställda fotogrammetriskt med UAS
 Utvärdering av höjdosäkerheten i digitala höjdmodeller framställda fotogrammetriskt med UAS Andreas Svensson & Tim Zetterberg 2013 Examensarbete, Grundnivå (Kandidatexamen), 15 hp Lantmäteriteknik Handledare:
Utvärdering av höjdosäkerheten i digitala höjdmodeller framställda fotogrammetriskt med UAS Andreas Svensson & Tim Zetterberg 2013 Examensarbete, Grundnivå (Kandidatexamen), 15 hp Lantmäteriteknik Handledare:
Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik
 Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik I checklistan redovisas hur GNSS-tekniken bör användas vid klassisk statisk stomnätsmätning. Syftet
Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik I checklistan redovisas hur GNSS-tekniken bör användas vid klassisk statisk stomnätsmätning. Syftet
TFEI02: Vågfysik. Tentamen : Svar och anvisningar. t 2π T x. s(x,t) = 2 cos [2π (0,4x/π t/π)+π/3]
![TFEI02: Vågfysik. Tentamen : Svar och anvisningar. t 2π T x. s(x,t) = 2 cos [2π (0,4x/π t/π)+π/3]](/thumbs/94/118804794.jpg "TFEI02: Vågfysik. Tentamen : Svar och anvisningar. t 2π T x. s(x,t) = 2 cos [2π (0,4x/π t/π)+π/3]") TFEI0: Vågfysik Tentamen 14100: Svar och anvisningar Uppgift 1 a) Vågen kan skrivas på formen: vilket i vårt fall blir: s(x,t) =s 0 sin t π T x + α λ s(x,t) = cos [π (0,4x/π t/π)+π/3] Vi ser att periodtiden
TFEI0: Vågfysik Tentamen 14100: Svar och anvisningar Uppgift 1 a) Vågen kan skrivas på formen: vilket i vårt fall blir: s(x,t) =s 0 sin t π T x + α λ s(x,t) = cos [π (0,4x/π t/π)+π/3] Vi ser att periodtiden
Förankringsmöte Svensk geoprocess version 3.0 Test 1. Mätningsanvisningar Byggnad
 Förankringsmöte Svensk geoprocess version 3.0 Test 1 Mätningsanvisningar Byggnad Bakgrund Mätningsanvisningarna bidrar till enhetliga geodata. är ett komplement till Svensk geoprocess geodataspecifikationer
Förankringsmöte Svensk geoprocess version 3.0 Test 1 Mätningsanvisningar Byggnad Bakgrund Mätningsanvisningarna bidrar till enhetliga geodata. är ett komplement till Svensk geoprocess geodataspecifikationer
Att mäta med kvalitet. Nya avtal för digital registerkarta Lycksele, Kent Ohlsson
 Att mäta med kvalitet Nya avtal för digital registerkarta Lycksele, 2018-04-18 Kent Ohlsson I det här passet går vi igenom följande: Begreppen kvalitet och god mätsed HMK Handbok i mät- och kartfrågor
Att mäta med kvalitet Nya avtal för digital registerkarta Lycksele, 2018-04-18 Kent Ohlsson I det här passet går vi igenom följande: Begreppen kvalitet och god mätsed HMK Handbok i mät- och kartfrågor
Övning 9 Tenta
 Övning 9 Tenta 014-11-8 1. När ljus faller in från luft mot ett genomskinligt material, med olika infallsvinkel, blir reflektansen den som visas i grafen nedan. Ungefär vilket brytningsindex har materialet?
Övning 9 Tenta 014-11-8 1. När ljus faller in från luft mot ett genomskinligt material, med olika infallsvinkel, blir reflektansen den som visas i grafen nedan. Ungefär vilket brytningsindex har materialet?
1(8) Dokumentversion: 1.0. Produktbeskrivning: Laserdata Skog
 Dokumentversion: 1.0. Produktbeskrivning: Laserdata Skog") 1(8) Datum: 2018-09-21 Dokumentversion: 1.0 Produktbeskrivning: Laserdata Skog LANTMÄTERIET 2018-09-11 2 (8) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
1(8) Datum: 2018-09-21 Dokumentversion: 1.0 Produktbeskrivning: Laserdata Skog LANTMÄTERIET 2018-09-11 2 (8) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
Rapport från refraktions- och reflektionsseismiska mätningar i. området Färgaren 3, Kristianstad
 Rapport från refraktions- och reflektionsseismiska mätningar i området Färgaren 3, Kristianstad Emil Lundberg, Bojan Brodic, Alireza Malehmir Uppsala Universitet 2014-06-04 1 Innehållsförteckning 2 1.
Rapport från refraktions- och reflektionsseismiska mätningar i området Färgaren 3, Kristianstad Emil Lundberg, Bojan Brodic, Alireza Malehmir Uppsala Universitet 2014-06-04 1 Innehållsförteckning 2 1.
Några vanliga fördelningar från ett GUM-perspektiv
 Några vanliga fördelningar från ett GUM-perspektiv I denna PM redovisas några av de vanligaste statistiska fördelningarna och deras hantering inom ramen för GUM: Guide to the Expression of Uncertainty
Några vanliga fördelningar från ett GUM-perspektiv I denna PM redovisas några av de vanligaste statistiska fördelningarna och deras hantering inom ramen för GUM: Guide to the Expression of Uncertainty
3D-scanning. Volymberäkning vid scanning av bergvägg. 3D-scanning Volume calculation when scanning a rock wall. Stefan Svahn
 3D-scanning Volymberäkning vid scanning av bergvägg 3D-scanning Volume calculation when scanning a rock wall Fakulteten för humaniora och samhällsvetenskap, Naturgeografi Examensarbete Mät- och kartprogrammet
3D-scanning Volymberäkning vid scanning av bergvägg 3D-scanning Volume calculation when scanning a rock wall Fakulteten för humaniora och samhällsvetenskap, Naturgeografi Examensarbete Mät- och kartprogrammet
Uppdatering av baskarta med UASfotogrammetri
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Uppdatering av baskarta med UASfotogrammetri i del av Furuvik Erik Danö och Martin Lundin 2018 Examensarbete,
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Uppdatering av baskarta med UASfotogrammetri i del av Furuvik Erik Danö och Martin Lundin 2018 Examensarbete,
RAPPORT. Laserskanning i kombination med stereofotografering
 RAPPORT Laserskanning i kombination med stereofotografering Dokumenttitel: Laserskanning i kombination med stereofotografering Dokumentdatum: 2013-11-17 Dokumenttyp: Rapport Publikationsnummer: 2014:099
RAPPORT Laserskanning i kombination med stereofotografering Dokumenttitel: Laserskanning i kombination med stereofotografering Dokumentdatum: 2013-11-17 Dokumenttyp: Rapport Publikationsnummer: 2014:099
EXPERIMENTELLT PROBLEM 2 DUBBELBRYTNING HOS GLIMMER
 EXPERIMENTELLT PROBLEM 2 DUBBELBRYTNING HOS GLIMMER I detta experiment ska du mäta graden av dubbelbrytning hos glimmer (en kristall som ofta används i polariserande optiska komponenter). UTRUSTNING Förutom
EXPERIMENTELLT PROBLEM 2 DUBBELBRYTNING HOS GLIMMER I detta experiment ska du mäta graden av dubbelbrytning hos glimmer (en kristall som ofta används i polariserande optiska komponenter). UTRUSTNING Förutom
Utvärdering av Inspect a Surface En applikation i fältmjukvaran Leica Captivate
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Utvärdering av Inspect a Surface En applikation i fältmjukvaran Leica Captivate Sandra Gräns sandra.grans@hotmail.com
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Utvärdering av Inspect a Surface En applikation i fältmjukvaran Leica Captivate Sandra Gräns sandra.grans@hotmail.com
Mätning av fokallängd hos okänd lins
 Mätning av fokallängd hos okänd lins Syfte Labbens syfte är i första hand att lära sig hantera mätfel och uppnå god noggrannhet, även med systematiska fel. I andra hand är syftet att hantera linser och
Mätning av fokallängd hos okänd lins Syfte Labbens syfte är i första hand att lära sig hantera mätfel och uppnå god noggrannhet, även med systematiska fel. I andra hand är syftet att hantera linser och
Övning 4 Polarisation
 Övning 4 Polarisation Transmission genom ett polarisationsfilter Malus lag: I 1 = cos 2 (θ) θ I 1 Reflektion och transmission I R Polariserat! Opolariserat i B n n i B I T Brewstervinkeln (polarisation
Övning 4 Polarisation Transmission genom ett polarisationsfilter Malus lag: I 1 = cos 2 (θ) θ I 1 Reflektion och transmission I R Polariserat! Opolariserat i B n n i B I T Brewstervinkeln (polarisation
Leica DISTO D8. Den mångsidiga för både inom- och utomhus!
 Leica DISTO D8 Den mångsidiga för både inom- och utomhus! Egenskaper Fördelar och ännu mer smarta egenskaper... 2,4 färgdisplay Egenskaper Digital målsökare med 4x zoom Indirekta distansmätningar Fördel
Leica DISTO D8 Den mångsidiga för både inom- och utomhus! Egenskaper Fördelar och ännu mer smarta egenskaper... 2,4 färgdisplay Egenskaper Digital målsökare med 4x zoom Indirekta distansmätningar Fördel
RAPPORT. Noggrann och kostnadseffektiv uppdatering av DTM med UAS för BIM
 RAPPORT Noggrann och kostnadseffektiv uppdatering av DTM med UAS för BIM Trafikverket Postadress: Rödavägen 1, 781 89, Borlänge E-post: trafikverket@trafikverket.se Telefon: 0771-91 91 TMALL 000 Rapport
RAPPORT Noggrann och kostnadseffektiv uppdatering av DTM med UAS för BIM Trafikverket Postadress: Rödavägen 1, 781 89, Borlänge E-post: trafikverket@trafikverket.se Telefon: 0771-91 91 TMALL 000 Rapport
Lägesosäkerhet vid mätning av dold punkt med totalstation och GNSS
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Lägesosäkerhet vid mätning av dold punkt med totalstation och GNSS Patrik Persson och Dennis Sjölén 2018 Examensarbete,
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Lägesosäkerhet vid mätning av dold punkt med totalstation och GNSS Patrik Persson och Dennis Sjölén 2018 Examensarbete,
Samhällsmätning i förändring
 Samhällsmätning i förändring Förord I kommunerna finns en omfattande mätningsteknisk verksamhet. Denna tillgodoser samhällets behov av detaljerade kartor och annan geografisk information geodata. Informationen
Samhällsmätning i förändring Förord I kommunerna finns en omfattande mätningsteknisk verksamhet. Denna tillgodoser samhällets behov av detaljerade kartor och annan geografisk information geodata. Informationen
MÄT-R MÄTNINGSTEKNISK REDOVISNING
 Uppdragsnr: 10209303 1 (7) MÄT-R MÄTNINGSTEKNISK REDOVISNING Projektnamn: Väg 939 Projektnummer: 10209303 WSP Samhällsbyggnad Laholmsvägen 10 302 66 Halmstad Besök: Laholmsvägen 10 Tel: +46 10 722 50 00
Uppdragsnr: 10209303 1 (7) MÄT-R MÄTNINGSTEKNISK REDOVISNING Projektnamn: Väg 939 Projektnummer: 10209303 WSP Samhällsbyggnad Laholmsvägen 10 302 66 Halmstad Besök: Laholmsvägen 10 Tel: +46 10 722 50 00
UAS Obemannad flygfotografering Trimtec AB www.trimtec.se. Copyright. 2013 Trimtec AB, all rights reserved
 UAS Obemannad flygfotografering Trimtec AB www.trimtec.se UAS Obemannad flygfotografering Agenda UAS Fördelar Tekniken Hur det går till Användningsområden Lagar Tillstånd Regler Kamera Egenskaper Noggrannhet
UAS Obemannad flygfotografering Trimtec AB www.trimtec.se UAS Obemannad flygfotografering Agenda UAS Fördelar Tekniken Hur det går till Användningsområden Lagar Tillstånd Regler Kamera Egenskaper Noggrannhet
Vad är god kvalitet vid mätning med GNSS/RTK?
 Vad är god kvalitet vid mätning med GNSS/RTK? MBK-dag, 4 november 2015 Lars Jämtnäs Enheten för geodetisk infrastruktur lars.jamtnas@lm.se Att bedöma kvalitet vid realtidsmätning Finns det något att jämföra
Vad är god kvalitet vid mätning med GNSS/RTK? MBK-dag, 4 november 2015 Lars Jämtnäs Enheten för geodetisk infrastruktur lars.jamtnas@lm.se Att bedöma kvalitet vid realtidsmätning Finns det något att jämföra
Ledstråk för personer med synskada
 Ledstråk för personer med synskada Vid byte mellan kollektiva färdmedel En sammanfattning av ett examensarbete med samma namn Håkan Lindström Förord Denna skrift är baserad på Håkan Lindströms examensarbete
Ledstråk för personer med synskada Vid byte mellan kollektiva färdmedel En sammanfattning av ett examensarbete med samma namn Håkan Lindström Förord Denna skrift är baserad på Håkan Lindströms examensarbete
UAS-fotogrammetri i anläggningsbranschen En nulägesbeskrivning ur ett användarperspektiv Examensarbete inom högskoleingenjörsprogrammet Byggingenjör
 UAS-fotogrammetri i anläggningsbranschen En nulägesbeskrivning ur ett användarperspektiv Examensarbete inom högskoleingenjörsprogrammet Byggingenjör DANIEL FAGERSTRÖM JOHAN ROSHOLM Institutionen för bygg-
UAS-fotogrammetri i anläggningsbranschen En nulägesbeskrivning ur ett användarperspektiv Examensarbete inom högskoleingenjörsprogrammet Byggingenjör DANIEL FAGERSTRÖM JOHAN ROSHOLM Institutionen för bygg-
Bestämning av luminanskoefficient i diffus belysning
 Publikation 1994:45 Bestämning av luminanskoefficient i diffus belysning Metodbeskrivning 504:1996 1 Orientering... 3 2 Sammanfattning... 3 3 Säkerhet... 3 4 Benämningar... 3 4.1 Objekt... 3 4.2 Mätplats...
Publikation 1994:45 Bestämning av luminanskoefficient i diffus belysning Metodbeskrivning 504:1996 1 Orientering... 3 2 Sammanfattning... 3 3 Säkerhet... 3 4 Benämningar... 3 4.1 Objekt... 3 4.2 Mätplats...
Geometrisk optik. Syfte och mål. Innehåll. Utrustning. Institutionen för Fysik 2006-04-25
 Geometrisk optik Syfte och mål Laborationens syfte är att du ska lära dig att: Förstå allmänna principen för geometrisk optik, (tunna linsformeln) Rita strålgångar Ställa upp enkla optiska komponenter
Geometrisk optik Syfte och mål Laborationens syfte är att du ska lära dig att: Förstå allmänna principen för geometrisk optik, (tunna linsformeln) Rita strålgångar Ställa upp enkla optiska komponenter
Polarisation. Abbas Jafari Q2-A. Personnummer: april Laborationsrapport
 Polarisation Laborationsrapport Abbas Jafari Q2-A Personnummer: 950102-9392 22 april 2017 1 Innehåll 1 Introduktion 2 2 Teori 2 2.1 Malus lag............................. 3 2.2 Brewstervinklen..........................
Polarisation Laborationsrapport Abbas Jafari Q2-A Personnummer: 950102-9392 22 april 2017 1 Innehåll 1 Introduktion 2 2 Teori 2 2.1 Malus lag............................. 3 2.2 Brewstervinklen..........................
Evaluation of digital terrain models created in post processing software for UAS-data
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Evaluation of digital terrain models created in post processing software for UAS-data Focused on point clouds
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Evaluation of digital terrain models created in post processing software for UAS-data Focused on point clouds