ElprojY/KMM 1/2 föreläsningar
|
|
|
- Stig Karlsson
- för 6 år sedan
- Visningar:
Transkript

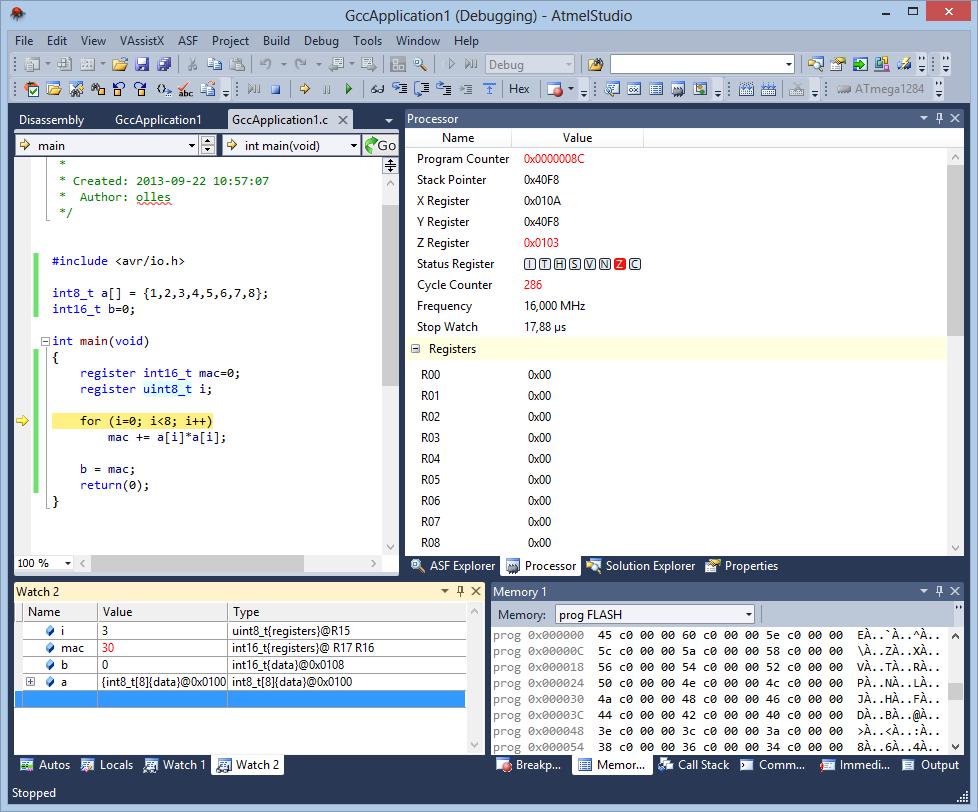
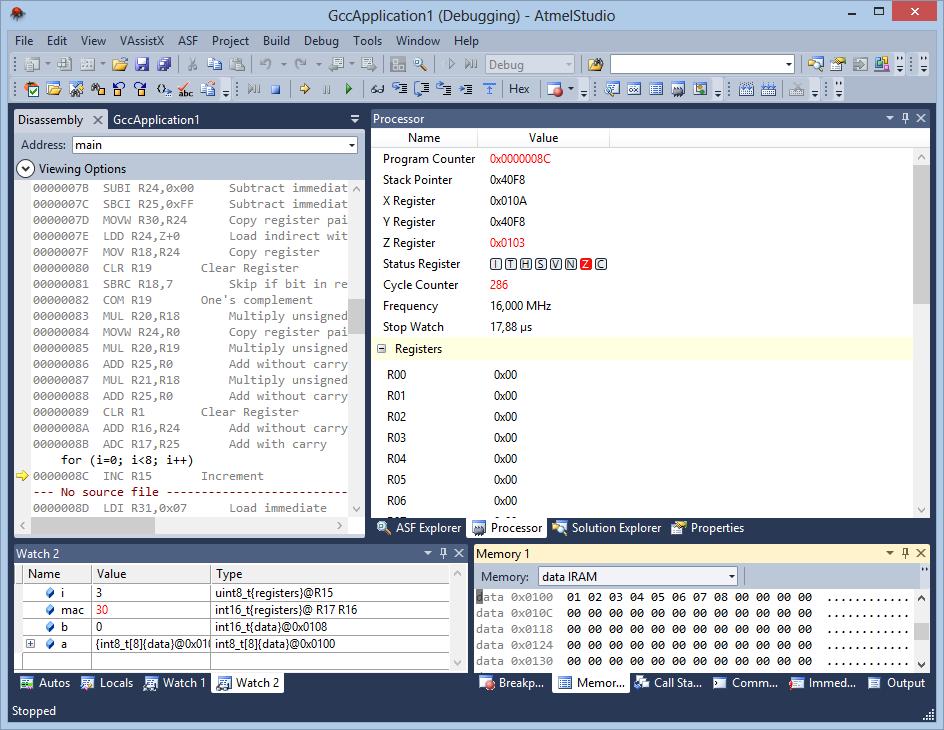
1 ElprojY/KMM 1/2 föreläsningar Enchipsdatorn AVR Prestanda Utvecklingsmiljö I/O. Kommunikation Sensorer Lite reglerteknik Beagleboard 1
2 Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell, seriell, A/D, timer/counter, PWM, I2C, SPI,...) clk rst irq I/O A I/O B I/O C Flash Prog CPU RAM Data I/O D EE Data AVR-familjen. 8-bits RISC-dator + I/O 2
 16 kb 1 kb 1 kb I/O (pinnar) 32 (40) 32 (40) 23 (28) Avbrott (antal) 36 20 26 I 2 C 1 1 1 SPI 3 1 1 UART 2 1 1 8-bit timers 2")
3 ATmega1284 <-> ATmega16<-> ATmega168 Egenskap Instruktioner Register Flash (program,konstanter) EEPROM (konstanter) 131 kraftfulla! 32 generella 8-bits 128 kb 16 kb 16 kb 4 kb 512 B 512 B SRAM (variabler) 16 kb 1 kb 1 kb I/O (pinnar) 32 (40) 32 (40) 23 (28) Avbrott (antal) I 2 C SPI UART bit timers bit timers PWM (kanaler) A/D (kanaler) klocka 0-20 MHz 0-16 MHz 0-20 MHz , 16 3
4 Principschema 2-stegs pipeline clk rst Motor, Servo, Sensor, Bluetooth,... 4
5 Hur fort går det? Med 20 MHz klocka gör AVR 20 MIPS (miljoner instruktioner per sekund) Hämta 1 Hämta 2 add brpl xxx yyy Verkställ 1 Verkställ 2 add brpl nop yyy instruktioner per millisekund! OBS, en CPLD på samma frekvens är klart snabbare! processor sekvensnät 20 MHz 20 MHz 5
6 Data space Programmerarmodell Program space k
7 Några instruktioner 1) Add without carry add r1,r2 ; r1 += r2 2) Load an I/O location to a register och tvärtom in r29,$3d ; r29 = IO($3D) out $3D,r29 ; IO($3D) = r29 7
8 Några instruktioner 3) Load indirect from Data Space using X och tvärtom ld r0,x+ ; r0 = D(R26&R27), (R26&R27)++ st X+,r0 ; D(X) = r0, X++ 4) Load from program memory lpm r16,z ; load a constant ; r16 = P(Z) 8

9 Stora AVR-en har 4 portar (A,B,C,D) à 8 bitar. Varje port kan vara en parallellport eller något annat. Till porten hör ett antal I/O-register. 9
10 Ett litet exempel sidan 51 i manualen! r0 r1 ddrb portb PB0 PB1 PB2 PB3 bar LED r31 pinb PB4 PB5 PB6 PB7 DIP switch 8 10
11 En pinne/bit i port B Här är pinnen! DDRBn PORTBn PINBn Alltså * 3 register * skriv till PORT * läs från PIN 11
12 Vanlig digital in/ut-matning - asm.include "m16def.inc".org 0 ; Skriv i datariktningsregistret ldi r17,(1<<ddb3) (1<<DDB2) (1<<DDB1) (1<<DDB0) out DDRB,r17 TILLBAKA: ; Läs av pinnarna in r16,pinb ; kolla tryckknappar 7,6,5,4... ; Skriv nåt på LEDarna ; skifta ner r16 fyra gånger out PORTB,r16 jmp TILLBAKA 12
13 Vanlig digital in/ut-matning - C #include <avr/io.h> int main(void) { uint8_t i;... /* Define directions for port pins */ DDRB = (1<<DDB3) (1<<DDB2) (1<<DDB1) (1<<DDB0); } while (1) { /* Läs av DIP-switchen */ i = PINB; /* kolla tryckknappar */... /* Gör nåt på LEDarna */ PORTB = i>>4; } Kommentar: 1) I/O-programmering likadan som i asm! 2) Nytt är variabeln i. Var bor den? Hur stor är den? 13
14 Olle: asm <-> C Manualen har exempel för båda CPU registren r0-r31 försvinner I/O-programmeringen likadan. 64 I/O-register Tidskritisk kod? Mer känsla för maskinen? Det går att blanda. Struktur, if-satser, forloopar..., datatyper... Kompilatorn fixar start-up module Kompilatorn fixar 14 kod för avbrottsrutiner
 Upload + Programmering 2) Läsa/skriva register (vrida på huvudet.")
 Singlesteppa 3) Köra med brytpunkt program/data 4) Stimuli (mata in 0/1")
15 Utvecklingsmiljö för Atmel Windows Atmel Studio (asm, avr-gcc) JTAG-kabel USB-kabel I labbet: Med ICE, exekvering i AVR 1) Upload + Programmering 2) Läsa/skriva register (vrida på huvudet...) 3) Singlesteppa 4) Köra med brytpunkt adress/data Hemma: Utan ICE, simulering i PCn 1) Läsa/skriva register 2) Singlesteppa 3) Köra med brytpunkt program/data 4) Stimuli (mata in 0/1 på pinnarna) 15
")
16 Anders Jr använder JTAG ICE! (in circuit emulator) 16
17 17
18 18
19 Hur kommunicerar processorerna med varandra och med omvärlden? servon Modul 1 Atmel sensorer Modul 2 Atmel Modul 3 Atmel 19
20 Kommunikation: UART (universal asynchronous receiver/transmitter) startbit 1 stoppbit AVR1 udr ucsra ucsrc ubrrh ubrrl 0,+5V Niklas kabel +12,-12V COM1 Bluetooth pinne teraterm USB (COM4) AVR2 udr ucsra ucsrc ubrrh ubrrl Bluetooth modul Cable replacement, 38400
21 2) Parallellport data handskakning + enkelt - många pinnar - dubbelriktad? 21
22 3) I 2 C Two wire interface Inter-integrated-circuit Enkel 2-trådsbuss (+ jord) AVR kan vara Master/Slave AVR kan vara Sändare/Mottagare 7-bits adress => 128 slavar Multimaster arbitration supported Upp till 400 khz IRQ0 IRQ1 master master master master slave slave Svårt men fränt! Gör hellre så här! 22
23 3) I 2 C Two wire interface Inter-integrated-circuit master slave slave AVR1 AVR2 AVR2 bit rate control status data slave address TWBR TWCR TWSR TWDR TWAR TWBR TWCR TWSR TWDR TWAR TWBR TWCR TWSR TWDR TWAR + 10 kohm 23 SDA SCL
24 4) SPI f max = 8/4 MHz 24

25 Sensor 1: IR-avståndsmätare spänning Less influence on the color of reflected objects, reflectivity Analog voltage corresponding to distance Detecting distance of 4 to 30 cm resp 20 till 150 cm External control circuit unnecessary Low cost 25 avstånd
26 Sensordata Ett exempel ur verkligheten: IR-avståndsmätare ger 10 mätvärden/s i form av analog spänning 0- >5V. Vi kopplar den direkt till en AVR, som har A/D-omvandlare ,1 0,2 0,3 t [s] Vid närmare studium av sensordatas kvalitet på oscilloskop upptäcks en störning mellan mätvärdena! Vi har tidigare valt DT = 0,05 s. Vi föreslår detta filter: x f [n] = min(x[n], x[n-1]) 26
27 Linjesensor Vårt sensorpaket, 10 sensorer (LED + fototransistor), Läses av med A/D Varje sensor kontrollerad ljust = 0, mörkt 1023 En bit tejp, Ojämn, varierande belysning 27
28 Sensor 2: Tejpsensorn mäter tejpens läge +5 analog spänning [0,5] V R1 R2 IR-lysdiod 28
29 Att mäta analog spänning: A/D-omvandling +5 R1 R2 omvandlare analog mux Värde 10 bitar Kontroll/Status 8 kanaler 0->5 V => 0->1023 start, färdig 29
30 Sensordata k Enkel tyngdpunktsberäkning: Hur ser e[n] utefter denna operation? 1) 2) e [ n] = m[ k] r[ k] m[ k] k k Brus eller vingel? Tidsskala! 30
31 Lite reglerteknik Hur gör man egentligen för att 1) gå mitt i en korridor? 2) följa en linje? trots att 1) 4-beningen haltar lite grann 2) linjen böjer av 3) golvet lutar lägessensor styrdon 31
32 Lite reglerteknik Vi måste konstruera en enkel linjär tidsdiskret regulator. 1) Vi bestämmer oss för ett lämpligt T, dvs tiden mellan två sensoravläsningar. 2) För roboten i korridoren bildar vi felet e[n] = x v [n] x h [n] För linjeföljaren får vi felet direkt ur sensorn. 3) En regulator bildar en lämpligt styrsignal u[n] mha av felet e[n]. felsignal e[n] Regulator styrsignal u[n] Vi antar att u[n] = 0 rakt fram u[n] > 0 sväng höger u[n] < 0 sväng vänster och att e[n] = 0 mitt på linjen e[n] > 0 vänster om linjen 32 e[n] < 0 höger om linjen
33 Lite reglerteknik Enklaste regulatorn: P-reglering u[n] = K P *e[n] Rattutslaget proportionellt mot felet 33
34 Lite reglerteknik Näst enklaste regulatorn: PD-reglering u[n] = K P *e[n] + K D *(e[n] e[n-1]) Alla bilarna har samma e[n] => samma positiva P-del 1) Neg D-del => minskat rattutslag 2) Pos D-del => ökat rattutslag 3) Mycket neg D-del => styr åt andra hållet 2 1 I-del behövs ej, kvarstående reglerfel finns ej här! 34
35 Lite reglerteknik OBS: 1) Det är viktigt att känna till T. PD-formeln ska ju egentligen se ut så här: u[ n] = = K K P P e[ n] + K e[ n] + D K D T e[ n] e[ n 1] T ( e[ n] e[ n 1]) Var försiktig med talområdet! Använd C, int u,e, ; Det är ju felhastigheten vi ska reagera på!!! Styregenskaperna ska inte ändras om T ändras! Variant: om vinkeln kan mätas u[ n] = K P e[ n] + K2 φ 35
36 Telemetri Linjeföljaren easy var först med 1) PD-reglering 2) Telemetri: sensorvärden och styrsignaler skickades till PC med BT 3) Reglerparametrar skickades från PC till easy fel styr easy tx rx Tooth Brush USB BT 36


37 trigger 1 Sensor 3: Ultraljud out 1 Voltage Frequency Max Range 5v 40KHz 3 m Min Range Sensitivity Input Trigger Echo Pulse 3 cm Detect a 3cm diameter stick at > 2 m 10uS Min. TTL level pulse Positive TTL level signal, width proportional to range. 37

38 Sensor 4: Piezoelektriskt gyro Φ = vinkelhastighet 38
39 Att mäta tid AVR har 3 timer/counters. Detta är timer/counter1. Simplified block diagram! 16-bits räknare jämförelseregister tidregister kontrollregister 39
40 Att mäta tid Polling 1) Vänta på att pinnen går hög 2) Läs av räknaren TCNT1 3) Vänta på att pinnen går låg 4) Läs av räknaren TCNT1 5) Subtrahera Avbrott 1) Sätt upp ICR1 för att ta en timestamp på positiv flank på pinnen I avbrottsrutinen Läs av ICR1, lägg i en variabel och ställ om polariteten på flanken Variabeln innehåller avståndet! 40
41 Utskrift. Välj själv. Subrutin: 1) Hämta tecken 2) Skriv till UART 3) Vänta på UART complete 2 clocks 1389 clocks vid ) ret Avbrottsrutin ( 1) Hämta tecken 2) Skriv till UART 3) rti UART complete) 2 clocks
42 Avbrottskällor i ATmega16 Vanlig avbrottsingång Vanlig avbrottsingång 42
43 Avbrott i AVR mega 16.org 0x0 ; hopptabell jmp RESET ; jmp EXT_INT0 ; yttre avbrott.org 0x1c jmp ADC ; A/D omvandlaren klar RESET: jmp RESET EXT_INT0: reti ; här börjar ; mitt huvudprogram ; yttre avbrott 1) En händelse sätter en 2) Om avbrottet är aktiverat så fås hopp till avbrottsrutin 3) Spara undan SREG Ta ner Betjäning Ta tillbaka SREG reti ADC: reti ; A/D-omvandlaren ; klar 43
44 Ännu ett exempel Styrning av servon, som reagerar på pulsbredd. 1-2 ms Kommandon * sväng x vänster * I 2 C Superstressad AVR? 8 st 20 ms 44
45 Pulsbreddsmodulering (PWM) - D/A-omvandling avbrott period komp räknare komp S R T ex motor Duty cycle Kontrollera om motorn/servot reagerar på pulskvot eller pulsbredd! 45
46 De flesta servon reagerar på pulsbredd 1-2 ms 1-2 ms 20 ms PWM 46
47 Avbrottstyrd servostyrning PWM-avbrott 2.5 ms = instruktioner! t : hämta styrsignal[n] : ställ om PWM och demux[n] Enkelt att kombinera med regleralgoritm, uppdatera styrsignal var 8:e gång 47

48 RFID Tags Sensor 5: RFID RFID Card Reader RS

49 Sensor 6: Färgsensor x A/D 49
50 Sensor 7: 3-axlig accelerometer 50

51 Sensor 8: Angular rate sensor


52 Beagleboard
 S-video (TV out) Stereo audio out/in High-capacity microsd slot and 4-GB microsd card JTAG")
53 Beagleboard Super-scalar ARM Cortex TM -A8 512-MB LPDDR RAM High-speed USB 2.0 OTG port optionally powers the board On-board four-port high-speed USB 2.0 hub with 10/100 Ethernet DVI-D (digital computer monitors and HDTVs) S-video (TV out) Stereo audio out/in High-capacity microsd slot and 4-GB microsd card JTAG Camera port

54 pdf finns, 3500 sidor! Processorn
55 Beagleboard Mjukvara. Vid reset händer detta: 1) TI X-loader startar. Den hämtar från en partition på SD-kortet: 2) U-boot. Om man hinner trycka på en tangent stannar man kvar där, annars startar: 3) Ångström, en Linux-distribution, som hämtas från en annan partition på SD-kortet.
56 Beagleboard Själv installerade jag Ubuntu på ett 16 GB-kort jag aptade in det mesta => 1,8 GB ssh, emacs, X, gcc (native compiler!)
57 Programexempel /* gcc lpthread threads.c o threads */ #include <pthread.h> #include <stdio.h> #define NUM_THREADS 5 void *PrintHello(void *threadid) { int tid; tid = (int)threadid; printf("hello World! It's me, thread #%d!\n", tid); pthread_exit(null); } int main (int argc, char *argv[]) { pthread_t threads[num_threads]; int rc, t; for(t=0; t<num_threads; t++){ printf("in main: creating thread %d\n", t); rc = pthread_create(&threads[t], NULL, PrintHello, (void *)t); if (rc){ printf("error; return code from pthread_create() is %d\n", rc); exit(-1); } } pthread_exit(null); }
58 Kopplingsförslag 1 Eth Wi Fi USB USB BT styr mät RS232 AVR1 AVR2 AVR3 I2C styr mät
59 Kopplingsförslag 2 Eth Wi Fi USB USB BT USB ser RS232 USB ser styr mät AVR1 AVR2 AVR3 Tröghetsnavigering styr mät styr mät
KMM. Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell, seriell, A/D, timer/counter, PWM, I2C, SPI,...) I/O A I/O B I/O C I/O D.
 I/O A I/O B I/O C I/O D.") KMM Enchipsdatorn AVR Kommunikation Sensorer Reglerteknik Avbrott Raspberry Pi www.atmel.com www.avrfreaks.net 1 Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell, seriell, A/D, timer/counter,
KMM Enchipsdatorn AVR Kommunikation Sensorer Reglerteknik Avbrott Raspberry Pi www.atmel.com www.avrfreaks.net 1 Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell, seriell, A/D, timer/counter,
KMM. Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell, seriell, A/D, timer/counter, PWM, I2C, SPI,...) I/O A I/O B I/O C I/O D.
 I/O A I/O B I/O C I/O D.") KMM Enchipsdatorn AVR Kommunikation Sensorer Reglerteknik Avbrott Beagleboard Raspberry Pi www.atmel.com www.avrfreaks.net 1 Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell, seriell, A/D,
KMM Enchipsdatorn AVR Kommunikation Sensorer Reglerteknik Avbrott Beagleboard Raspberry Pi www.atmel.com www.avrfreaks.net 1 Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell, seriell, A/D,
KMM. Hur fort går det? Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell, seriell, A/D, timer/counter, PWM, I2C, SPI,...
 Enchipsdatorn AVR Kommunikation Sensorer Reglerteknik Avbrott Raspberry Pi KMM www.atmel.com www.avrfreaks.net 1 Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell, seriell, A/D, timer/counter,
Enchipsdatorn AVR Kommunikation Sensorer Reglerteknik Avbrott Raspberry Pi KMM www.atmel.com www.avrfreaks.net 1 Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell, seriell, A/D, timer/counter,
Kandidatprojekt. Hur fort går det? Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell, seriell, A/D, timer/counter, PWM, I2C, SPI,...
 Kandidatprojekt Enchipsdatorn AVR Kommunikation Sensorer Reglerteknik Avbrott Beagleboard Raspberry Pi www.atmel.com www.avrfreaks.net 1 Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell,
Kandidatprojekt Enchipsdatorn AVR Kommunikation Sensorer Reglerteknik Avbrott Beagleboard Raspberry Pi www.atmel.com www.avrfreaks.net 1 Enchipsdator = allt på ett chip, CPU, RAM, ROM, I/O (parallell,
22/02/16. Arduino Introduktion till Arduino. Arduino. Microcontroller - Embedded systems. Historia Organisation - Ekosystem
 22/02/16 Arduino Introduktion till Arduino Historia Organisation - Ekosystem ANDERS J JOHANSSON Hårdavara Mjukvara Kringkomponenter Tips Demos! Microcontroller - Embedded systems Inbyggda system Processing
22/02/16 Arduino Introduktion till Arduino Historia Organisation - Ekosystem ANDERS J JOHANSSON Hårdavara Mjukvara Kringkomponenter Tips Demos! Microcontroller - Embedded systems Inbyggda system Processing
LARMANLÄGGNING. Digitala Projekt, EITF11. Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall
 LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
Växtviskaren EITF11 Digitala projekt VT15, I12
 Växtviskaren EITF11DigitalaprojektVT15,I12 NathalieLiljebrunn,EbbaRiismark,AnnaNorelius LundsTekniskaHögskola Institutionenförelektro ochinformationsteknik Handledare:BertilLindvall,AndreasJohansson 2015
Växtviskaren EITF11DigitalaprojektVT15,I12 NathalieLiljebrunn,EbbaRiismark,AnnaNorelius LundsTekniskaHögskola Institutionenförelektro ochinformationsteknik Handledare:BertilLindvall,AndreasJohansson 2015
Innehållsförteckning. Figur- och tabellförteckning. Figure 1 Blockschema över hårdvaran...4 Figure 2 Blockschema över programet...
 Abstract Syftet var att konstruera en väder station som håller koll på temperaturen. Huvudfunktionen var att få en grafisk visning av temperaturen över ett visst tidsintervall eftersom vi valde den grafiska
Abstract Syftet var att konstruera en väder station som håller koll på temperaturen. Huvudfunktionen var att få en grafisk visning av temperaturen över ett visst tidsintervall eftersom vi valde den grafiska
Bilen som inte kan krocka
 Projektrapport Digitala system EITA15 Bilen som inte kan krocka Gruppmedlemmar: Oscar Skarler, Jonathan Persson, Erik Schiemann och Mohammed Abou Naasa vt 2019 Sammanfattning Inom kursen Digitala system
Projektrapport Digitala system EITA15 Bilen som inte kan krocka Gruppmedlemmar: Oscar Skarler, Jonathan Persson, Erik Schiemann och Mohammed Abou Naasa vt 2019 Sammanfattning Inom kursen Digitala system
Effektpedal för elgitarr
 EITF11 - Digitala Projekt Effektpedal för elgitarr Handledare: Bertil Lindvall Ivan Rimac (I05) Jimmy Lundberg (I08) 2011-05-10 Contents Bakgrund... 3 Kravspecifikation... 3 Kravspecifikation Effektpedal...
EITF11 - Digitala Projekt Effektpedal för elgitarr Handledare: Bertil Lindvall Ivan Rimac (I05) Jimmy Lundberg (I08) 2011-05-10 Contents Bakgrund... 3 Kravspecifikation... 3 Kravspecifikation Effektpedal...
Ett program som frågar regelbundet om något skall utföras. Exempelvis om spänningen på ett batteri sjunkit under en viss nivå.
 CT3760 Mikrodatorteknik Föreläsning 12 Torsdag 2006-10-05 Naxos Pollning Ett program som frågar regelbundet om något skall utföras. Exempelvis om spänningen på ett batteri sjunkit under en viss nivå. En
CT3760 Mikrodatorteknik Föreläsning 12 Torsdag 2006-10-05 Naxos Pollning Ett program som frågar regelbundet om något skall utföras. Exempelvis om spänningen på ett batteri sjunkit under en viss nivå. En
Digitala Projekt(EITF40) - Larm
 - Larm") Digitala Projekt(EITF40) - Larm Handledare: Bertil Lindvall Kristoffer Sätermark, dt08ks6 Magnus Johansson, dt08mj9 Innehåll 1 Introduktion 1 2 Kravspec 1 3 Hårdvara 2 3.1 knappsats och decoder........................
Digitala Projekt(EITF40) - Larm Handledare: Bertil Lindvall Kristoffer Sätermark, dt08ks6 Magnus Johansson, dt08mj9 Innehåll 1 Introduktion 1 2 Kravspec 1 3 Hårdvara 2 3.1 knappsats och decoder........................
LABORATION DATORKONSTRUKTION TSEA83 UART. Namn och personnummer. Version: 1.0 2013 (OS)
") LABORATION DATORKONSTRUKTION TSEA83 UART Version: 1.0 2013 (OS) Namn och personnummer Godkänd 1 blank sida 2 Innehåll 1 Inledning 5 1.1 Syfte................................. 5 1.2 Förberedelser............................
LABORATION DATORKONSTRUKTION TSEA83 UART Version: 1.0 2013 (OS) Namn och personnummer Godkänd 1 blank sida 2 Innehåll 1 Inledning 5 1.1 Syfte................................. 5 1.2 Förberedelser............................
Robotfotboll med Arduino
 Robotfotboll med Arduino Av Staffan Melin och Martin Blom Bild & form-skolan, Masthugget, Göteborg 2015 Staffan Melin, staffan.melin@oscillator.se Martin Blom, martinblomblom@hotmail.com Detta verk är
Robotfotboll med Arduino Av Staffan Melin och Martin Blom Bild & form-skolan, Masthugget, Göteborg 2015 Staffan Melin, staffan.melin@oscillator.se Martin Blom, martinblomblom@hotmail.com Detta verk är
Datakommunikation med IR-ljus.
 Datakommunikation med -ljus. I den här uppgiften skall du kommunicera med hjälp av infrarött () ljus. Du skall kunna sända tecken från tangentbordet samt ta emot tecken och visa dem på skärmen. Genom att
Datakommunikation med -ljus. I den här uppgiften skall du kommunicera med hjälp av infrarött () ljus. Du skall kunna sända tecken från tangentbordet samt ta emot tecken och visa dem på skärmen. Genom att
Bussar och I/O. samt. vad kan man göra med NEXYS3. Nexys3. Prog + spänningsmatning. Expansionskort
 Bussar och I/O samt vad kan man göra med NEXYS3 Prog + spänningsmatning mha USB Nexys3 Expansionskort 1 Basic I/O Master.ucf (User Constraints File) ## 7 segment display Net "seg" LOC = T17 IOSTANDARD
Bussar och I/O samt vad kan man göra med NEXYS3 Prog + spänningsmatning mha USB Nexys3 Expansionskort 1 Basic I/O Master.ucf (User Constraints File) ## 7 segment display Net "seg" LOC = T17 IOSTANDARD
Laboration 4: Knappstuds Drivrutiner för att eliminera störningar.
 ATMega16 Laborationer av Kjell 2 Rev:5 Datum: 29.09.2010 Page 1 of 7 Laboration 4: Knappstuds Drivrutiner för att eliminera störningar. Inledning: Laborationskortet EasyAVR6 har bland annat tryckknappar
ATMega16 Laborationer av Kjell 2 Rev:5 Datum: 29.09.2010 Page 1 of 7 Laboration 4: Knappstuds Drivrutiner för att eliminera störningar. Inledning: Laborationskortet EasyAVR6 har bland annat tryckknappar
Digitala Projekt(EITF40) - Larm
 - Larm") Digitala Projekt(EITF40) - Larm Handledare: Bertil Lindvall Erik Oredsson, I-09 Sara Sellin, I-09 2012-05-08 1. SAMMANFATTNING I denna rapport presenteras vårt projekt att bygga ett huslarm från grunden
Digitala Projekt(EITF40) - Larm Handledare: Bertil Lindvall Erik Oredsson, I-09 Sara Sellin, I-09 2012-05-08 1. SAMMANFATTNING I denna rapport presenteras vårt projekt att bygga ett huslarm från grunden
General Purpose registers ALU I T H S V N Z C SREG. Antag att vi behöver skriva in talet 25 till register R18
 F3 Föreläsning i Mikrodatorteknink 2006-08-29 Kärnan i microcontrollern består av ett antal register och en ALU. Till detta kommer också ett antal portar. Det finns 64 st portar. Några är anslutna mot
F3 Föreläsning i Mikrodatorteknink 2006-08-29 Kärnan i microcontrollern består av ett antal register och en ALU. Till detta kommer också ett antal portar. Det finns 64 st portar. Några är anslutna mot
Bussar och I/O. samt. vad kan man göra med NEXYS3
 Bussar och I/O samt vad kan man göra med NEXYS3 Den närmaste framtiden Grupp bildad Klar fredag 1600 Kravspec klar Vad ska ni bygga? Designskiss börjar Hur ska ni bygga den?... 5 6 7 8 9 PIPE-LAB UART-LAB
Bussar och I/O samt vad kan man göra med NEXYS3 Den närmaste framtiden Grupp bildad Klar fredag 1600 Kravspec klar Vad ska ni bygga? Designskiss börjar Hur ska ni bygga den?... 5 6 7 8 9 PIPE-LAB UART-LAB
Introduktion till Arduino
 Introduktion till Arduino CHRISTIAN ANTFOLK Faculty of Engineering LTH Dept of. Biomedical Engineering Christian Antfolk Slide 1 Preliminärt schema Faculty of Engineering LTH Dept of. Biomedical Engineering
Introduktion till Arduino CHRISTIAN ANTFOLK Faculty of Engineering LTH Dept of. Biomedical Engineering Christian Antfolk Slide 1 Preliminärt schema Faculty of Engineering LTH Dept of. Biomedical Engineering
Innehåll. 1 Inledning 3
 Digitala projekt Tomas Bjerre D04 d04tb@student.lth.se Gustav Reiz D04 d04gr@student.lth.se Roger Schildmeijer D04 d04rp@student.lth.se 26 februari 2008 1 Innehåll 1 Inledning 3 2 Utrustning 3 2.1 ATMega16...............................
Digitala projekt Tomas Bjerre D04 d04tb@student.lth.se Gustav Reiz D04 d04gr@student.lth.se Roger Schildmeijer D04 d04rp@student.lth.se 26 februari 2008 1 Innehåll 1 Inledning 3 2 Utrustning 3 2.1 ATMega16...............................
Kontrollskrivning Mikrodatorteknik CDT209 2007-09-20 S2-704
 Kontrollskrivning Mikrodatorteknik CDT209 2007-09-20 S2-704 Svar Svar till uppgifterna lämnas på separat papper. En poäng per uppgift. Max 30 poäng. Bonuspoäng beräknas enligt följande tabell: 6-10 poäng
Kontrollskrivning Mikrodatorteknik CDT209 2007-09-20 S2-704 Svar Svar till uppgifterna lämnas på separat papper. En poäng per uppgift. Max 30 poäng. Bonuspoäng beräknas enligt följande tabell: 6-10 poäng
Programräknaren visar alltid på nästa instruktion som skall utföras. Så fort en instruktion har hämtats så visar programräknaren på nästa instruktion.
 F5 Föreläsning i Mikrodatorteknink 2006-09-05 Programräknaren visar alltid på nästa instruktion som skall utföras. Så fort en instruktion har hämtats så visar programräknaren på nästa instruktion. Programräknaren
F5 Föreläsning i Mikrodatorteknink 2006-09-05 Programräknaren visar alltid på nästa instruktion som skall utföras. Så fort en instruktion har hämtats så visar programräknaren på nästa instruktion. Programräknaren
A-del motsvarande KS1
 MÄLARDALENS HÖGSKOLA Institutionen för elektroteknik Tentamen Mikrodatorteknik CT3760 Datum 2005-10-28 Tid 08.30 12.30 Svar till A- och B-del A-del motsvarande KS1 Uppgift A1. Vad blir resultatet då instruktionen
MÄLARDALENS HÖGSKOLA Institutionen för elektroteknik Tentamen Mikrodatorteknik CT3760 Datum 2005-10-28 Tid 08.30 12.30 Svar till A- och B-del A-del motsvarande KS1 Uppgift A1. Vad blir resultatet då instruktionen
Introduktion till Arduino
 Introduktion till Arduino CHRISTIAN ANTFOLK Faculty of Engineering LTH Dept of. Biomedical Engineering Christian Antfolk Slide 1 Preliminärt labschema LV4 LV5 LV6 7 Lab 1 Töjning & flöde? / Tobias Måndag
Introduktion till Arduino CHRISTIAN ANTFOLK Faculty of Engineering LTH Dept of. Biomedical Engineering Christian Antfolk Slide 1 Preliminärt labschema LV4 LV5 LV6 7 Lab 1 Töjning & flöde? / Tobias Måndag
DIGITALA PROJEKT Väderstation
 DIGITALA PROJEKT Väderstation Christian Lindquist, E03 Leonardo Bello, E03 Abstract Almost everybody has some kind of temperature measurement device in their home. The latest in this industry are more
DIGITALA PROJEKT Väderstation Christian Lindquist, E03 Leonardo Bello, E03 Abstract Almost everybody has some kind of temperature measurement device in their home. The latest in this industry are more
Provmoment: Ladokkod: Tentamen ges för: Tentamen TE111B El3. Namn: Personnummer: Tentamensdatum: 20120410 Tid: 14:00-18:00.
 Mikrodatorteknik Provmoment: Ladokkod: Tentamen ges för: Tentamen TE111B El3 7,5 högskolepoäng Namn: Personnummer: Tentamensdatum: 20120410 Tid: 14:00-18:00 Hjälpmedel: Totalt antal poäng på tentamen:
Mikrodatorteknik Provmoment: Ladokkod: Tentamen ges för: Tentamen TE111B El3 7,5 högskolepoäng Namn: Personnummer: Tentamensdatum: 20120410 Tid: 14:00-18:00 Hjälpmedel: Totalt antal poäng på tentamen:
4. Pipelining. 4. Pipelining
 4. Pipelining 4. Pipelining Det finns en pipelinad biltvätt i Linköping spoltvätttork spoltvätt tork spolning tvätt tork De tre momenten tar lika lång tid Alla bilar går igenom samma program Väntetid 1/3
4. Pipelining 4. Pipelining Det finns en pipelinad biltvätt i Linköping spoltvätttork spoltvätt tork spolning tvätt tork De tre momenten tar lika lång tid Alla bilar går igenom samma program Väntetid 1/3
3. Mikroprogrammering II
 3. Mikroprogrammering II lite repetition in/ut-matning avbrott på OR-datorn hoppinstruktion labben Olle Roos dator LDA 000 12 ADD 100 7 STA 000 13 12 1 13 8 13 6 8 0 18,1,11 2,3,5,11 7,8,11 17,10 18,1,11
3. Mikroprogrammering II lite repetition in/ut-matning avbrott på OR-datorn hoppinstruktion labben Olle Roos dator LDA 000 12 ADD 100 7 STA 000 13 12 1 13 8 13 6 8 0 18,1,11 2,3,5,11 7,8,11 17,10 18,1,11
Ansvarig lärare: Olof Andersson, Telefon 021-101314 (besöker skrivsalen)
") MÄLRLENS HÖGSKOL Institutionen för elektroteknik Tentamen Mikrodatorteknik T3760 atum 2005-10-28 Tid 08.30 12.30 nsvarig lärare: Olof ndersson, Telefon 021-101314 (besöker skrivsalen) Om du klarat samtliga
MÄLRLENS HÖGSKOL Institutionen för elektroteknik Tentamen Mikrodatorteknik T3760 atum 2005-10-28 Tid 08.30 12.30 nsvarig lärare: Olof ndersson, Telefon 021-101314 (besöker skrivsalen) Om du klarat samtliga
Laboration 5 C-programmering på AVR TSEA57 Datorteknik I
 Laboration 5 C-programmering på AVR TSEA57 Datorteknik I Anders Nilsson 2018 version 0.22 Innehåll 1 Introduktion 5 1.1 Syfte....................................... 5 1.2 Förkunskaper..................................
Laboration 5 C-programmering på AVR TSEA57 Datorteknik I Anders Nilsson 2018 version 0.22 Innehåll 1 Introduktion 5 1.1 Syfte....................................... 5 1.2 Förkunskaper..................................
Datorteknik 1 (AVR 1)
") Namn: Laborationen godkänd: Digitala system 15 hp Datorteknik 1 (AVR 1) LTH Ingenjörshögskolan vid Campus Helsingborg Introduktion till datorteknikutrustningen. Laborationens syfte. Syftet med laborationen
Namn: Laborationen godkänd: Digitala system 15 hp Datorteknik 1 (AVR 1) LTH Ingenjörshögskolan vid Campus Helsingborg Introduktion till datorteknikutrustningen. Laborationens syfte. Syftet med laborationen
Projektlaboration 4, synkronisering av klockan
 Namn: Laborationen godkänd: Digitala system 15 p L T H I n g e n j ö r s h ö g s k o l a n v i d C a m p u s H e l s i n g b o r g Datorprojekt, del 4 Projektlaboration 4, synkronisering av klockan Asynkron
Namn: Laborationen godkänd: Digitala system 15 p L T H I n g e n j ö r s h ö g s k o l a n v i d C a m p u s H e l s i n g b o r g Datorprojekt, del 4 Projektlaboration 4, synkronisering av klockan Asynkron
Thunder s Truck projektrapport
 LTH Thunder s Truck projektrapport EITF11 Digitala projekt 2012-05-10 Abstract The goal of this project was to build a truck operated by an IP-remote. The robot is built using standard parts such as two
LTH Thunder s Truck projektrapport EITF11 Digitala projekt 2012-05-10 Abstract The goal of this project was to build a truck operated by an IP-remote. The robot is built using standard parts such as two
Dataminne I/O Stack 0x005D 0x3D SP low byte 0x005E 0x3E SP high byte
 CT3760 Mikrodatorteknik Föreläsning 4 Tisdag 2005-09-06 Stacken I datasammmanhang är en stack ett minnesområde. Det är processorn som använder stacken. För att skapa en stack anger man en adress i stackpekarregistret.
CT3760 Mikrodatorteknik Föreläsning 4 Tisdag 2005-09-06 Stacken I datasammmanhang är en stack ett minnesområde. Det är processorn som använder stacken. För att skapa en stack anger man en adress i stackpekarregistret.
Elektroteknik MF1016 föreläsning 9 MF1017 föreläsning 7 Mikrodatorteknik
 Elektroteknik MF1016 föreläsning 9 MF1017 föreläsning 7 - Inbyggda system - Analog till digital signal - Utvecklingssystem, målsystem - Labutrustningen - Uppbyggnad av mikrokontroller - Masinkod, assemblerkod
Elektroteknik MF1016 föreläsning 9 MF1017 föreläsning 7 - Inbyggda system - Analog till digital signal - Utvecklingssystem, målsystem - Labutrustningen - Uppbyggnad av mikrokontroller - Masinkod, assemblerkod
Datorteknik. Tomas Nordström. Föreläsning 6. För utveckling av verksamhet, produkter och livskvalitet.
 Datorteknik Tomas Nordström Föreläsning 6 För utveckling av verksamhet, produkter och livskvalitet. Föreläsning 6 Vad händer vid uppstart SoC och Kringkretsar, PIO Programmering i Assembler Lab2 genomgång
Datorteknik Tomas Nordström Föreläsning 6 För utveckling av verksamhet, produkter och livskvalitet. Föreläsning 6 Vad händer vid uppstart SoC och Kringkretsar, PIO Programmering i Assembler Lab2 genomgång
AVR 3 - datorteknik. Avbrott. Digitala system 15 hp. Förberedelser
 Namn: Laborationen godkänd: Digitala system 15 hp AVR 3 - datorteknik LTH Ingenjörshögskolan vid Campus Helsingborg Avbrott. Syften med den här laborationen är att introducera avbrott. Avbrott som uppkommer
Namn: Laborationen godkänd: Digitala system 15 hp AVR 3 - datorteknik LTH Ingenjörshögskolan vid Campus Helsingborg Avbrott. Syften med den här laborationen är att introducera avbrott. Avbrott som uppkommer
ARDUINO i RC sammanhang
 ARDUINO i RC sammanhang Vad är ARDUINO? Arduinokorten är en open-source elektronikplattform baserad på lättanvänd hårdvara och mjukvara Utvecklades av Ivrea Interaction Design Institute i Italien som ett
ARDUINO i RC sammanhang Vad är ARDUINO? Arduinokorten är en open-source elektronikplattform baserad på lättanvänd hårdvara och mjukvara Utvecklades av Ivrea Interaction Design Institute i Italien som ett
Svar till Övning3 Datorteknik, HH vt12 Avbrott och timers
 Svar till Övning3 Datorteknik, HH vt12 Avbrott och timers Avbrott generellt F7.1. Avbrott sköts med hårdvara i processorn, man läser av hårdvarumässigt. Polling är en enklare princip för I/O- hantering.
Svar till Övning3 Datorteknik, HH vt12 Avbrott och timers Avbrott generellt F7.1. Avbrott sköts med hårdvara i processorn, man läser av hårdvarumässigt. Polling är en enklare princip för I/O- hantering.
Digitalteknik: CoolRunner-II CPLD Starter Kit
 CR:1 CoolRunner-II CPLD Starter Kit är ett litet utvecklingssystem för Xilinx-kretsen XC2C256. Utvecklingskortet kommer från företaget Digilent. Vid laborationerna i digitalteknik kommer kortet att användas
CR:1 CoolRunner-II CPLD Starter Kit är ett litet utvecklingssystem för Xilinx-kretsen XC2C256. Utvecklingskortet kommer från företaget Digilent. Vid laborationerna i digitalteknik kommer kortet att användas
VHDL 1. Programmerbara kretsar
 VHDL 1 Programmerbara kretsar CPLD FPGA VHDL Kombinatorik with-select-when when-else Sekvensnät process case if-then-else Programmerbara kretsar PLD = programmable logic device CPLD = complex PLD, i princip
VHDL 1 Programmerbara kretsar CPLD FPGA VHDL Kombinatorik with-select-when when-else Sekvensnät process case if-then-else Programmerbara kretsar PLD = programmable logic device CPLD = complex PLD, i princip
Grundläggande datavetenskap, 4p
 Grundläggande datavetenskap, 4p Kapitel 2 Datamanipulation, Processorns arbete Utgående från boken Computer Science av: J. Glenn Brookshear 2004-11-09 IT och Medier 1 Innehåll CPU ALU Kontrollenhet Register
Grundläggande datavetenskap, 4p Kapitel 2 Datamanipulation, Processorns arbete Utgående från boken Computer Science av: J. Glenn Brookshear 2004-11-09 IT och Medier 1 Innehåll CPU ALU Kontrollenhet Register
Digitalteknik: CoolRunner-II CPLD Starter Kit Med kommentarer för kursen ht 2012
 Med kommentarer för kursen ht 2012 2012 CR:1 CoolRunner-II CPLD Starter Kit är ett litet utvecklingssystem för Xilinx-kretsen XC2C256. Utvecklingskortet kommer från företaget Digilent. Vid laborationerna
Med kommentarer för kursen ht 2012 2012 CR:1 CoolRunner-II CPLD Starter Kit är ett litet utvecklingssystem för Xilinx-kretsen XC2C256. Utvecklingskortet kommer från företaget Digilent. Vid laborationerna
RAPPORT: DIGITALA PROJEKT
 2012-05-14 LTH RAPPORT: DIGITALA PROJEKT Linus Ahlberg, Johan Ryde och Kristin Svensson I-09 Innehåll Inledning... 3 Krav... 3 Ursprungliga krav... 3 Modifierade krav (ej trådlös)... 3 Konstruktion...
2012-05-14 LTH RAPPORT: DIGITALA PROJEKT Linus Ahlberg, Johan Ryde och Kristin Svensson I-09 Innehåll Inledning... 3 Krav... 3 Ursprungliga krav... 3 Modifierade krav (ej trådlös)... 3 Konstruktion...
F7: I/O hantering. Asynkron och synkron busscykel 68000 Bussfördelning. Periferikretsar
 1 F7: I/O hantering Periferikretsar ADC, DAC, UART, etc. Databussar Seriella bussar I 2 C USB CAN Systembussar PCI VME Asynkron och synkron busscykel 68000 Bussfördelning 1 Periferikretsar ADC/DAC Räknare
1 F7: I/O hantering Periferikretsar ADC, DAC, UART, etc. Databussar Seriella bussar I 2 C USB CAN Systembussar PCI VME Asynkron och synkron busscykel 68000 Bussfördelning 1 Periferikretsar ADC/DAC Räknare
Institutionen för elektro- och informationsteknologi, LTH
 Datorteknik Föreläsning 5 Realtidssystem och realtidsprogrammering Mål Att du ska förstå hur avbrott används för - Mätning - Styrning - Stöd för körning av flera processer Att du ska förstå begreppet tråd
Datorteknik Föreläsning 5 Realtidssystem och realtidsprogrammering Mål Att du ska förstå hur avbrott används för - Mätning - Styrning - Stöd för körning av flera processer Att du ska förstå begreppet tråd
Datorteknik. Föreläsning 5. Realtidssystem och realtidsprogrammering. Institutionen för elektro- och informationsteknologi, LTH.
 Datorteknik Föreläsning 5 Realtidssystem och realtidsprogrammering Mål Att du ska förstå hur avbrott används för - Mätning - Styrning - Stöd för körning av flera processer Att du ska förstå begreppet tråd
Datorteknik Föreläsning 5 Realtidssystem och realtidsprogrammering Mål Att du ska förstå hur avbrott används för - Mätning - Styrning - Stöd för körning av flera processer Att du ska förstå begreppet tråd
EV3 Roboten. Sida 1 av 13
 EV3 Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
EV3 Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
Träff 1 - Introduktion
 Arduino Arduino är den lilla mikroprocessorn, baserad på ATmega chipet, som man med små C-skript kan få liv i sina hemprojekt och experiment. Arduino-kortet ansluts till datorns USB-port för både strömförsörjning
Arduino Arduino är den lilla mikroprocessorn, baserad på ATmega chipet, som man med små C-skript kan få liv i sina hemprojekt och experiment. Arduino-kortet ansluts till datorns USB-port för både strömförsörjning
Beacon BluFi Bluzone. Givarna har mycket hög känslighet och kan mäta mycket små förändringar.
 Oversikt Systemet från Bluvision är ett helt nytt och effektivt sätt att övervaka utrustning. Det bygger på konceptet IoT (Internet Of Things) och att den övervakade utrustningen själv automatiskt ska
Oversikt Systemet från Bluvision är ett helt nytt och effektivt sätt att övervaka utrustning. Det bygger på konceptet IoT (Internet Of Things) och att den övervakade utrustningen själv automatiskt ska
Feeding Daisy. EITF11 Lunds Tekniska Högskola. Grupp 12: Pontus Akervall Louise Landare Anton Schölin. En automatisk blomvattnare
 Feeding Daisy En automatisk blomvattnare EITF11 Lunds Tekniska Högskola Grupp 12: Pontus Akervall Louise Landare Anton Schölin Handledare: Bertil Lindvall Introduktion... 3 Hårdvara... 3 Processor... 3
Feeding Daisy En automatisk blomvattnare EITF11 Lunds Tekniska Högskola Grupp 12: Pontus Akervall Louise Landare Anton Schölin Handledare: Bertil Lindvall Introduktion... 3 Hårdvara... 3 Processor... 3
JOFEN-Prototypes. Målsökande pansarvagn. Projektarbete i Kursen EITA15. Jonatan Claesson, Olle Jonasson, Felix Rödén, Edvin Rossi & Nils Olén
 JOFEN-Prototypes Målsökande pansarvagn Projektarbete i Kursen EITA15 Jonatan Claesson, Olle Jonasson, Felix Rödén, Edvin Rossi & Nils Olén Handledare: Bertil Lindvall & Lars-Göran Larsson Abstract This
JOFEN-Prototypes Målsökande pansarvagn Projektarbete i Kursen EITA15 Jonatan Claesson, Olle Jonasson, Felix Rödén, Edvin Rossi & Nils Olén Handledare: Bertil Lindvall & Lars-Göran Larsson Abstract This
Digitala System: Datorteknik ERIK LARSSON
 Digitala System: Datorteknik ERIK LARSSON Dator Primärminne Instruktioner och data Data/instruktioner Kontroll Central processing unit (CPU) Fetch instruction Execute instruction Programexekvering (1)
Digitala System: Datorteknik ERIK LARSSON Dator Primärminne Instruktioner och data Data/instruktioner Kontroll Central processing unit (CPU) Fetch instruction Execute instruction Programexekvering (1)
Digitalt eller Analogt
 Digitalt eller Analogt digitalt: q 0 255 q 7 q 6 q 5 q 4 q 3 q 2 q 1 q 0 1 ½ ¼ 1/8 1/16 1/32 1/64 1/128 eller analogt? q Digital style Old school Digital Analogomvandlare? b 7 b 6 b 5 b 4 b 3 b 2 b 1 b
Digitalt eller Analogt digitalt: q 0 255 q 7 q 6 q 5 q 4 q 3 q 2 q 1 q 0 1 ½ ¼ 1/8 1/16 1/32 1/64 1/128 eller analogt? q Digital style Old school Digital Analogomvandlare? b 7 b 6 b 5 b 4 b 3 b 2 b 1 b
Minnen delas in i två huvudgrupper, permanenta och icke permanenta. Non-volatile and volatile.
 CT3760 Mikrodatorteknik Föreläsning 2 Tisdag 2005-08-30 Minnestyper. Atmega 16 innehåller följande minnestyper: SRAM för dataminne FLASH för programminne EEPROM för parametrar och konstanter. Minnen delas
CT3760 Mikrodatorteknik Föreläsning 2 Tisdag 2005-08-30 Minnestyper. Atmega 16 innehåller följande minnestyper: SRAM för dataminne FLASH för programminne EEPROM för parametrar och konstanter. Minnen delas
Lunds Tekniska Högskola. I-10 Grupp 11: David Sundström Max Schulz Albert Lundberg Handledare: Bertil Lindvall
 2013 Lunds Tekniska Högskola I-10 Grupp 11: David Sundström Max Schulz Albert Lundberg Handledare: Bertil Lindvall DIGITALA PROJEKT The objective of the course Digital Project is letting a group of students
2013 Lunds Tekniska Högskola I-10 Grupp 11: David Sundström Max Schulz Albert Lundberg Handledare: Bertil Lindvall DIGITALA PROJEKT The objective of the course Digital Project is letting a group of students
ETSA01 Digitala Projekt (I) VT- 13. Projektarbete AC- 58008. Handledare Bertil Lindvall
 VT- 13. Projektarbete AC- 58008. Handledare Bertil Lindvall") ETSA01 Digitala Projekt (I) VT- 13 Projektarbete AC- 58008 Victor Bodin Albert Strömberg Alexander Söderberg Handledare Bertil Lindvall 1 Sammanfattning Rapporten behandlar processen kopplat till konstruktionen
ETSA01 Digitala Projekt (I) VT- 13 Projektarbete AC- 58008 Victor Bodin Albert Strömberg Alexander Söderberg Handledare Bertil Lindvall 1 Sammanfattning Rapporten behandlar processen kopplat till konstruktionen
Digitala System Projekt - EITA15 VT *SUPER DUPER KLOCKAN*
 Digitala System Projekt - EITA15 VT - 2019 *SUPER DUPER KLOCKAN* Handledare: Bertil Lindvall Studenter: NamWan Chansaeng Janne Stojovski Joakim Svensson Daniel Löfgren Abstract The goal of this project
Digitala System Projekt - EITA15 VT - 2019 *SUPER DUPER KLOCKAN* Handledare: Bertil Lindvall Studenter: NamWan Chansaeng Janne Stojovski Joakim Svensson Daniel Löfgren Abstract The goal of this project
EDA480/EDA485 - Maskinorienterad programmering, tentamen 2006-xx-xx 1(7)
") EDA480/EDA485 - Maskinorienterad programmering, tentamen 2006-xx-xx 1(7) 1. Motivation ROM. 8kbyte 2 3 2 10 byte 13 Adressbitar [A12,A0] direkt till ROM-kapsel. RWM. 32kbyte 2 5 2 10 byte 15 Adressbitar
EDA480/EDA485 - Maskinorienterad programmering, tentamen 2006-xx-xx 1(7) 1. Motivation ROM. 8kbyte 2 3 2 10 byte 13 Adressbitar [A12,A0] direkt till ROM-kapsel. RWM. 32kbyte 2 5 2 10 byte 15 Adressbitar
Avståndsmätare. Digitala System EITA Grupp 7. Abdelsalem Yabrag, Abdulhadi kikar, Fredrik Peterson, Jesper Annefors
 Avståndsmätare Digitala System EITA15 2019-05-21 Grupp 7 Abdelsalem Yabrag, Abdulhadi kikar, Fredrik Peterson, Jesper Annefors Handledare: Bertil Lindvall, Lars-Göran Larsson Abstract There are some situations
Avståndsmätare Digitala System EITA15 2019-05-21 Grupp 7 Abdelsalem Yabrag, Abdulhadi kikar, Fredrik Peterson, Jesper Annefors Handledare: Bertil Lindvall, Lars-Göran Larsson Abstract There are some situations
Moment 2 Digital elektronik. Föreläsning Inbyggda system, introduktion
 Moment 2 Digital elektronik Föreläsning Inbyggda system, introduktion Jan Thim 1 Inbyggda system, introduktion Innehåll: Historia Introduktion Arkitekturer Mikrokontrollerns delar 2 1 Varför lär vi oss
Moment 2 Digital elektronik Föreläsning Inbyggda system, introduktion Jan Thim 1 Inbyggda system, introduktion Innehåll: Historia Introduktion Arkitekturer Mikrokontrollerns delar 2 1 Varför lär vi oss
Tentamen PC-teknik 5 p Lösningar och kommentarer
 Tentamen PC-teknik 5 p Lösningar och kommentarer Program: Di2, Em3, Et3 Datum: 04-08-10 Tid: 13:30-18:30 Lokal E171 Hjälpmedel: Linjal, miniräknare, Instruktionsrepertoar för 8086 (utdelas), Lathund, Pacific
Tentamen PC-teknik 5 p Lösningar och kommentarer Program: Di2, Em3, Et3 Datum: 04-08-10 Tid: 13:30-18:30 Lokal E171 Hjälpmedel: Linjal, miniräknare, Instruktionsrepertoar för 8086 (utdelas), Lathund, Pacific
Maskinorienterad programmering
 Undantagshantering och interna avbrott ARM Cortex-M4 exceptions, programmering av undantagshantering Ur innehållet: Faults Software traps Avbrott från interna enheter, Systick Läsanvisningar: Arbetsbok
Undantagshantering och interna avbrott ARM Cortex-M4 exceptions, programmering av undantagshantering Ur innehållet: Faults Software traps Avbrott från interna enheter, Systick Läsanvisningar: Arbetsbok
Maskinorienterad programmering
 Externa avbrott Anslutning av extern avbrottsvippa, programmering med konfigurering och hantering av externa avbrott. Introduktion till time-sharing, enkel task-switch. Ur innehållet: NVIC och EXTI (SYSCFG)
Externa avbrott Anslutning av extern avbrottsvippa, programmering med konfigurering och hantering av externa avbrott. Introduktion till time-sharing, enkel task-switch. Ur innehållet: NVIC och EXTI (SYSCFG)
#include <avr/io.h> #include <avr/interrupt.h> #include <util/delay.h> unsigned char num;
 #include #include #include unsigned char num; int count = 0; // antal i lokalen char larmtriggered = 0; //om larmet är utlöst char larmactivated = 0; //om larmet
#include #include #include unsigned char num; int count = 0; // antal i lokalen char larmtriggered = 0; //om larmet är utlöst char larmactivated = 0; //om larmet
Tentamen PC-teknik 5 p Lösningar och kommentarer
 Tentamen PC-teknik 5 p Lösningar och kommentarer Program: Di2, Em3 Datum: 06-01-12 Tid: 13:30-18:30 Lokal E171 Hjälpmedel: Linjal, miniräknare, Instruktionsrepertoar för 8086 (utdelas), Lathund, Pacific
Tentamen PC-teknik 5 p Lösningar och kommentarer Program: Di2, Em3 Datum: 06-01-12 Tid: 13:30-18:30 Lokal E171 Hjälpmedel: Linjal, miniräknare, Instruktionsrepertoar för 8086 (utdelas), Lathund, Pacific
TENTAMEN Datorteknik (DO2005) D1/E1/Mek1/Ö1
 D1/E1/Mek1/Ö1") Halmstad University School of Information Science, Computer and Electrical Engineering Tomas Nordström, CC-lab TENTAMEN Datorteknik (DO2005) D1/E1/Mek1/Ö1 Datum: 2012-05- 23 Tid och plats: 9:00 13:00 i
Halmstad University School of Information Science, Computer and Electrical Engineering Tomas Nordström, CC-lab TENTAMEN Datorteknik (DO2005) D1/E1/Mek1/Ö1 Datum: 2012-05- 23 Tid och plats: 9:00 13:00 i
Digitala projekt Linjeföljande bil
 Digitala projekt Linjeföljande bil EITA15 Elektro- och informationsteknik Handledare: Bertil Lindvall Grupp 17 Hannes Adolfsson Milad Amini Albin Svärd Almir Šaran Emir Zukic EITA 15 - Digitala projekt
Digitala projekt Linjeföljande bil EITA15 Elektro- och informationsteknik Handledare: Bertil Lindvall Grupp 17 Hannes Adolfsson Milad Amini Albin Svärd Almir Šaran Emir Zukic EITA 15 - Digitala projekt
Realtidsprogrammering. En introduktion Implementering (med exempel från PIC)
") Realtidsprogrammering En introduktion Implementering (med exempel från PIC) Utan timing Periodtid varierar beroende på funktionernas exekveringstid. Specificera endast maxtid ( Worst case) och eventuellt
Realtidsprogrammering En introduktion Implementering (med exempel från PIC) Utan timing Periodtid varierar beroende på funktionernas exekveringstid. Specificera endast maxtid ( Worst case) och eventuellt
Konstruktion av en radiostyrd legobil. Digitala projekt av Arbon Vata Leonardo Vukmanovic Amid Bhatia
 Konstruktion av en radiostyrd legobil Digitala projekt av Arbon Vata Leonardo Vukmanovic Amid Bhatia 1 1.Innehållsförtäckning Rapport Radiostyrd LEGO bil...1 1. Innehållsförtäckning...2 2.0 Inledning...3
Konstruktion av en radiostyrd legobil Digitala projekt av Arbon Vata Leonardo Vukmanovic Amid Bhatia 1 1.Innehållsförtäckning Rapport Radiostyrd LEGO bil...1 1. Innehållsförtäckning...2 2.0 Inledning...3
TEMPERATUR OCH VINDMÄTARE MED HÖGTALARFUNKTION
 TEMPERATUR OCH VINDMÄTARE MED HÖGTALARFUNKTION Digitala Projekt EITF 11, 18 maj 2015 Grupp 13; Morten Rosén, Henrik Boris-Möller, Christoffer Nordberg Projekthandledare: Bertil Lindvall Innehållsförteckning
TEMPERATUR OCH VINDMÄTARE MED HÖGTALARFUNKTION Digitala Projekt EITF 11, 18 maj 2015 Grupp 13; Morten Rosén, Henrik Boris-Möller, Christoffer Nordberg Projekthandledare: Bertil Lindvall Innehållsförteckning
LARMANLÄGGNING. Digitala Projekt, EITF11. Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall
 LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
Digitala projekt - Radiostyrd bil
 Digitala projekt - Radiostyrd bil Handledare: Bertil Lindvall Johan Lennartsson e02jle David Thomasson e02dt Magnus Lisborg e02mls Innehållsförteckning 1. Inledning.3 2. Målsättning med projektet.......3
Digitala projekt - Radiostyrd bil Handledare: Bertil Lindvall Johan Lennartsson e02jle David Thomasson e02dt Magnus Lisborg e02mls Innehållsförteckning 1. Inledning.3 2. Målsättning med projektet.......3
A/D D/A omvandling. Lars Wallman. Lunds Universitet / LTH / Institutionen för Mätteknik och Industriell Elektroteknik
 A/D D/A omvandling Lars Wallman Innehåll Repetition binära tal Operationsförstärkare Principer för A/D omvandling Parallellomvandlare (Flash) Integrerande (Integrating Dual Slope) Deltapulsmodulation (Delta
A/D D/A omvandling Lars Wallman Innehåll Repetition binära tal Operationsförstärkare Principer för A/D omvandling Parallellomvandlare (Flash) Integrerande (Integrating Dual Slope) Deltapulsmodulation (Delta
Digitala Projekt (EITF11)
") Digitala Projekt (EITF11) Temperaturgivare med larm Handledare: Bertil Lindvall 2014-05-20 Erik Hellered, I-11 Andreas Sjöblom, I-11 Philip Dahlström, I-11 Table of Contents Inledning... 1 Kravspecifikation...
Digitala Projekt (EITF11) Temperaturgivare med larm Handledare: Bertil Lindvall 2014-05-20 Erik Hellered, I-11 Andreas Sjöblom, I-11 Philip Dahlström, I-11 Table of Contents Inledning... 1 Kravspecifikation...
Mikroprogrammering I
 ikroprogrammering I Olle Roos-datorn (fö2+) Björn Lindskog-datorn (lab) Att bygga en CPU Pipelinad dator (fö4,lab2) Variabel exekveringstid Variabelt format Inget överlapp Central styrenhet, som är mikroprogrammerad
ikroprogrammering I Olle Roos-datorn (fö2+) Björn Lindskog-datorn (lab) Att bygga en CPU Pipelinad dator (fö4,lab2) Variabel exekveringstid Variabelt format Inget överlapp Central styrenhet, som är mikroprogrammerad
Linjeföljare Digitala projekt Johan Engström e02je Henrik Persson e02hp
 2005-12-11 Linjeföljare Digitala projekt Johan Engström e02je Henrik Persson e02hp Abstract This project is about how we built a line follower. The project-course is given by the It-institution of LTH
2005-12-11 Linjeföljare Digitala projekt Johan Engström e02je Henrik Persson e02hp Abstract This project is about how we built a line follower. The project-course is given by the It-institution of LTH
WALL E. WALL EVADER EDI021 DIGITALA PROJEKT
 2009 Av: Aron Lidé dt05al1 Marie Li Korse dt05ml9 Handledare: Bertil Lindvall WALL E. WALL EVADER EDI021 DIGITALA PROJEKT Sammanfattning Den här rapporten behandlar konstruktionen av en självgående robot
2009 Av: Aron Lidé dt05al1 Marie Li Korse dt05ml9 Handledare: Bertil Lindvall WALL E. WALL EVADER EDI021 DIGITALA PROJEKT Sammanfattning Den här rapporten behandlar konstruktionen av en självgående robot
Datorprojekt, del 1. Digitala system 15 p
 Namn: Laborationen godkänd: Digitala system 15 p L T H I n g e n j ö r s h ö g s k o l a n v i d C a m p u s H e l s i n g b o r g Datorprojekt, del 1 Projektet består i att skapa en klocka där tiden visas
Namn: Laborationen godkänd: Digitala system 15 p L T H I n g e n j ö r s h ö g s k o l a n v i d C a m p u s H e l s i n g b o r g Datorprojekt, del 1 Projektet består i att skapa en klocka där tiden visas
Systemkonstruktion SERIEKOMMUNIKATION
 Systemkonstruktion SERIEKOMMUNIKATION Laborationsansvariga: Anders Arvidsson Utskriftsdatum: 2005-04-26 Syfte Laborationen syftar till att ge studenten tillfälle att närmare bekanta sig med RS-232-protokollet,
Systemkonstruktion SERIEKOMMUNIKATION Laborationsansvariga: Anders Arvidsson Utskriftsdatum: 2005-04-26 Syfte Laborationen syftar till att ge studenten tillfälle att närmare bekanta sig med RS-232-protokollet,
Lunds Tekniska Högskola Elektro- och informationsteknik Digitala projekt (EITF11)
") Skola: Institution : Kurs : Lunds Tekniska Högskola Elektro- och informationsteknik Digitala projekt (EITF11) Projekttyp : Rapportsammanfattning Handledare : Bertil Lindvall Studenter : Datum : 2015-05-11
Skola: Institution : Kurs : Lunds Tekniska Högskola Elektro- och informationsteknik Digitala projekt (EITF11) Projekttyp : Rapportsammanfattning Handledare : Bertil Lindvall Studenter : Datum : 2015-05-11
INGENJÖRSHÖGSKOLAN INGENJÖRSHÖGSKOLAN
 Dagens föreläsning Inbyggnadsprocessorer - och programmering ❾ Översikt PIC-processorn ❿ Familj ❿ Flash / EPROM ❿ Introduktion: 16F84 ❾ ❿ Harvard / von Neumann ❿ CISC / RISC ❿ Pipelining ❾ Programmering
Dagens föreläsning Inbyggnadsprocessorer - och programmering ❾ Översikt PIC-processorn ❿ Familj ❿ Flash / EPROM ❿ Introduktion: 16F84 ❾ ❿ Harvard / von Neumann ❿ CISC / RISC ❿ Pipelining ❾ Programmering
Mål. Datorteknik. Repetition av avbrott. Innehåll. Mätning och styrning. Datorer för mätning och styrning. timer. Datorsystem A/D. Analog insignal D/A
 Mål Datorteknik Föreläsning 5 Att du ska förstå hur avbrott används för - Mätning - Styrning - Stöd för körning av fle processer Att du ska förstå begreppet tråd Att du ska veta hur odelba resurser kan
Mål Datorteknik Föreläsning 5 Att du ska förstå hur avbrott används för - Mätning - Styrning - Stöd för körning av fle processer Att du ska förstå begreppet tråd Att du ska veta hur odelba resurser kan
AVR Studio 4 Och AVRFLASH
 Komma igång med AVR Studio 4 Och AVRFLASH Kjell Fällman 2010 Rev: 1 Laboration 1 AVR Studio 4, WinAVR(AVR-GCC) och AVRFLASH AVR Studio 4, ATMELs IDE för 8bits AVR MCU http://www.atmel.com/dyn/products/tools_card.asp?tool_id=2725
Komma igång med AVR Studio 4 Och AVRFLASH Kjell Fällman 2010 Rev: 1 Laboration 1 AVR Studio 4, WinAVR(AVR-GCC) och AVRFLASH AVR Studio 4, ATMELs IDE för 8bits AVR MCU http://www.atmel.com/dyn/products/tools_card.asp?tool_id=2725
Periferikretsar. ADC/DAC Räknare Realtidsklocka Timer Interrupthanterare UART (Universal Asynchronous Reciever and Transmitter) Seriell dataöverföring
 Seriell dataöverföring") Periferikretsar ADC, DAC, UART, etc. Databussar Seriella bussar I 2 C USB CAN Systembussar PCI VME F7: I/O hantering Asynkron och synkron busscykel 68000 Bussfördelning 1 Periferikretsar ADC/DAC Räknare
Periferikretsar ADC, DAC, UART, etc. Databussar Seriella bussar I 2 C USB CAN Systembussar PCI VME F7: I/O hantering Asynkron och synkron busscykel 68000 Bussfördelning 1 Periferikretsar ADC/DAC Räknare
LABORATION. Datorteknik Y
 LABORATION Datorteknik Y Avbrottsprogrammering på Darma Version 4.03 Februari 2019 (OA, KP) Namn och personnummer Godkänd 1 1 Inledning Syftet med laborationen är först att ge övning i avbrottsprogrammering
LABORATION Datorteknik Y Avbrottsprogrammering på Darma Version 4.03 Februari 2019 (OA, KP) Namn och personnummer Godkänd 1 1 Inledning Syftet med laborationen är först att ge övning i avbrottsprogrammering
Lego Robot [ ] [ ] [ ]
![Lego Robot [ ] [ ] [ ]](/thumbs/91/107207567.jpg "Lego Robot [ ] [ ] [ ]") Lego Robot av [ ] [ ] [ ] INNEHÅLLSFÖRTECKNING LABB1 (INFORMATION) # UPPGIFT 1 # UPPGIFT 2 # UPPGIFT 3 # LABB2 (OPERATÖRER) # UPPGIFT 1 # UPPGIFT 2 # UPPGIFT 3 # LABB3 (VARIABLER) # UPPGIFT 1 # UPPGIFT
Lego Robot av [ ] [ ] [ ] INNEHÅLLSFÖRTECKNING LABB1 (INFORMATION) # UPPGIFT 1 # UPPGIFT 2 # UPPGIFT 3 # LABB2 (OPERATÖRER) # UPPGIFT 1 # UPPGIFT 2 # UPPGIFT 3 # LABB3 (VARIABLER) # UPPGIFT 1 # UPPGIFT
AVRStudio på tre minuter. Micke Josefsson, 2005
 AVRStudio på tre minuter Micke Josefsson, 2005 Mycket kort intro till AVRStudio Utvecklingsmiljön AVRStudio innehåller en editor för att mata in programmet, en simulator för att under kontrollerade former
AVRStudio på tre minuter Micke Josefsson, 2005 Mycket kort intro till AVRStudio Utvecklingsmiljön AVRStudio innehåller en editor för att mata in programmet, en simulator för att under kontrollerade former
EITF11 - Digitala projekt. Hastighetsmätare. Hugo Backmyr Mattias Karlsson
 EITF11 - Digitala projekt Hastighetsmätare Hugo Backmyr 2015-05-17 Inledning Syftet med kursen är att illustrera industriellt utvecklingsarbete. Målet med projektuppgiften är en prototyp för vidareutveckling
EITF11 - Digitala projekt Hastighetsmätare Hugo Backmyr 2015-05-17 Inledning Syftet med kursen är att illustrera industriellt utvecklingsarbete. Målet med projektuppgiften är en prototyp för vidareutveckling
Roboten. Sida 1 av 11
 EV3 ipad Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
EV3 ipad Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
F6: I/O hantering. Typer av I/O i ett datorsystem. Protokoll för synkronisering. Drivrutiner. Memory mapped Port mapped. Polling Timed Interrupt DMA
 F6: I/O hantering Typer av I/O i ett datorsystem Memory mapped Port mapped Protokoll för synkronisering Polling Timed Interrupt DMA Drivrutiner 1 Memory mapped I/O enheter avkodas precis som ett minne
F6: I/O hantering Typer av I/O i ett datorsystem Memory mapped Port mapped Protokoll för synkronisering Polling Timed Interrupt DMA Drivrutiner 1 Memory mapped I/O enheter avkodas precis som ett minne
Enchipsdatorns gränssnitt mot den analoga omvärlden
 Enchipsdatorns gränssnitt mot den analoga omvärlden Erik Larsson Analog/Digital (A/D) och Digital/Analog (D/A) omvandling AD omvandling DA omvandling Motivation - -.2.4.6.8 -.2.4.6.8 - -.2.4.6.8 Analog/Digital
Enchipsdatorns gränssnitt mot den analoga omvärlden Erik Larsson Analog/Digital (A/D) och Digital/Analog (D/A) omvandling AD omvandling DA omvandling Motivation - -.2.4.6.8 -.2.4.6.8 - -.2.4.6.8 Analog/Digital
TEMPERATURMÄTARE MED GRAFRITARE
 LUNDS TEKNISKA HÖGSKOLA TEMPERATURMÄTARE MED GRAFRITARE Grupp 6 Jesper Henrikson & Viktor Sköld Handledare: Bertil Lindvall 1 Innehållsförteckning Innehållsförteckning 2 Inledning 3 Kravspecifikation 4
LUNDS TEKNISKA HÖGSKOLA TEMPERATURMÄTARE MED GRAFRITARE Grupp 6 Jesper Henrikson & Viktor Sköld Handledare: Bertil Lindvall 1 Innehållsförteckning Innehållsförteckning 2 Inledning 3 Kravspecifikation 4
Tentamen Datorteknik D del 2, TSEA49
 Tentamen Datorteknik D del 2, TSEA49 Datum 2012-05-24 Lokal TER2 Tid 8-12 Kurskod TSEA49 Provkod TEN1 Kursnamn Datorteknik D del 2 Institution ISY Antal frågor 6 Antal sidor (inklusive denna 10 sida) Kursansvarig
Tentamen Datorteknik D del 2, TSEA49 Datum 2012-05-24 Lokal TER2 Tid 8-12 Kurskod TSEA49 Provkod TEN1 Kursnamn Datorteknik D del 2 Institution ISY Antal frågor 6 Antal sidor (inklusive denna 10 sida) Kursansvarig
GPIO - General Purpose Input Output
 GPIO - General Purpose Input Output Ur innehållet: Digital IO Ideala och verkliga signaler Bitvis in- och utmatning Anslutning - fysiskt gränssnitt F407 - GPIO-modul tillämpningar Programmering av enkelt
GPIO - General Purpose Input Output Ur innehållet: Digital IO Ideala och verkliga signaler Bitvis in- och utmatning Anslutning - fysiskt gränssnitt F407 - GPIO-modul tillämpningar Programmering av enkelt
Blue Key Digitala projekt VT
 Blue Key Digitala projekt VT 2 2004 Maj 2004 Martin Erikson, E00 Mikael Andersson, E00 Department of Information Technology 0 Lund Institute of Technology Sammanfattning Denna rapport behandlar vårt projekt
Blue Key Digitala projekt VT 2 2004 Maj 2004 Martin Erikson, E00 Mikael Andersson, E00 Department of Information Technology 0 Lund Institute of Technology Sammanfattning Denna rapport behandlar vårt projekt
Designplan mätning av acceleration hos bilbanebil
 Designplan mätning av acceleration hos bilbanebil version 1 Per-Emil Eliasson, Claes Fälth, Manne Gustafson, Andreas Gustafsson 22 juni 2003 INNEHÅLL Industriprojekt ISY Innehåll 1 Inledning 2 2 Design
Designplan mätning av acceleration hos bilbanebil version 1 Per-Emil Eliasson, Claes Fälth, Manne Gustafson, Andreas Gustafsson 22 juni 2003 INNEHÅLL Industriprojekt ISY Innehåll 1 Inledning 2 2 Design
Mekanisk solros, Digitala projekt(edi021) Kristoer Nordvall, Stefan Windfeldt, Inlämmnad: 4 december 2006
 Kristoer Nordvall, Stefan Windfeldt, Inlämmnad: 4 december 2006") Mekanisk solros, Digitala projekt(edi021) Kristoer Nordvall, d03kn@student.lth.se Stefan Windfeldt, d03sw@student.lth.se Inlämmnad: 4 december 2006 Innehåll 1 Problembeskrivning 3 2 Teknisk beskrivning
Mekanisk solros, Digitala projekt(edi021) Kristoer Nordvall, d03kn@student.lth.se Stefan Windfeldt, d03sw@student.lth.se Inlämmnad: 4 december 2006 Innehåll 1 Problembeskrivning 3 2 Teknisk beskrivning