Systemskiss. Michael Andersson Version 1.0: Status. Platooning Granskad DOK, PL Godkänd Erik Frisk
|
|
|
- Carl-Johan Åkesson
- för 9 år sedan
- Visningar:
Transkript
1 Systemskiss Michael Andersson Version 1.0: Status Granskad DOK, PL Godkänd Erik Frisk Systemskiss i

2 Projektidentitet, TSRT10, HT2012, Tekniska högskolan vid Linköpings Universitet, ISY, Reglerteknik Namn Ansvar Telefon E-post Michael Andersson Projektledare (PL) mican817 Jasper Germeys Dokumentansvarig (DOK) jasge693 Christoer Norén Testansvarig (TST) chrno389 Anders Granström Designansvarig (DSN) andgr127 Komponentansvariga Josef Larsson för Hårdvara (HAR) josla972 Andreas Jansson för Simulator (SIM) andja283 Andreas Svensson för Reglering (REG) andsv288 E-postlista för hela gruppen: Hemsida: Kund: Scania AB (publ), , Södertälje. Tel vxl: Fax: Kontaktperson hos kund: Rickard Lyberger, rickard.lyberger@scania.com. Kursansvarig: Daniel Axehill, 2A:549, , daniel@isy.liu.se. Handledare: Daniel Eriksson, 2E:475, , daner@isy.liu.se. Beställare: Erik Frisk, frisk@isy.liu.se. Systemskiss ii
 070-53 199 16 andsv288 E-postlista för hela gruppen: Hemsida: http://www.isy.liu.se/edu/projekt/reglerteknik/2012/platooning/ Kund: Scania AB (publ), 151 87, Södertälje.")
3 Innehåll Status i Projektidentitet ii Dokumenthistorik iv 1 Inledning 1 2 Översikt av systemet Beskrivning av Lastbilssystemet Alix WSU Regulator och estimator CAN-Gateway Lastbilens sensorer Regulator och estimator Simulator Mjukvarusimulering Hårdvarusimulering Systemskiss iii

4 Dokumenthistorik Version Datum Utförda förändringar Utförda av Granskad Godkännd Frisk Små uppdateringer TST, DOK DOK Små uppdateringer SIM, TST DOK, PL Rättat till grammatik och syftningsfel. SIM, TST Handl Redigerat bilder Första upplaga SIM, TST Handl Systemskiss iv


5 Inledning Detta dokument tar upp hur systemen i projektet ska byggas upp. I dokumentet kommer den planerade hårdvaran att presenteras samt hur den ska användas i projektet. Projektet utförs på Tekniska högskolan vid Linköpings Universitet i samarbete med Scania i Södertälje höstterminen Syftet med platooning är att få luftmotståndet att minska genom att låta lastbilar att köra nära varandra i en kolonn. Detta resulterar i minskad bränsleförbrukning som är positivt både ekonomiskt och miljömässigt. För att platooning ska fungera säkert krävs det bl.a. att lastbilarna får information om varandras hastigheter och positioner. Därför behövs estimatorer för att skatta tillstånden hos de olika fordonen samt en regulator för att styra det egna fordonet i kolonnen. 2 Översikt av systemet Figur 1 visar en lastbil med exempel på några av de många sensorer som den innehåller. I detta projekt ska en modell över en lastbil och dess omgivning programmeras i Simulink. Den modellerade lastbilen ska sedan hårdvarusimuleras för att på så sätt kunna efterlikna lastbilar som kör i en kolonn samtidigt som den kommunicerar med de övriga fordonen i kolonnen.vid ett lyckat resultat leder detta till minskad bränsleförbrukning för deltagarna i kolonnen. För att kunna göra en hårdvarusimulering krävs en dator med Matlab samt xpc-target för kommunikation med hårdvara. I Figur 2 [3] visas det system med de komponenter som kommer användas i projektet för att få platooning att fungera. I bilden ser man hur de olika delsystemen kommunicerar med varandra och hur detta sker. En estimator och regulator ska även de implementeras i Simulink för att få lastbilen i kolonnen att bete sig på ett acceptabelt sätt, dvs. den ska inte köra ryckigt, krav på säkerhetsavstånd ska hållas, osv. Figur 1: Bild över den egna lastbilens utrustning I verkligheten är lastbilen utrustad med diverse sensorer såsom: radar, hastighetsmätare, accelerometrar m.m., vilka kommer att modelleras i simulationsmiljön. Som exempel kan radarn modelleras genom att räkna ut avstånd och relativ hastighet i förhållande till lastbilen framför. Systemskiss 1

6 Beskrivning av Lastbilssystemet Projektgruppen ska undersöka huruvida WSU:n (Wireless safety unit (se avsnitt nedan)) i systemet skall plockas bort för att istället låta regulatorn ta emot data och skicka information via Alix (se avsnitt nedan). En ytt medför att estimatorn och regulatorn (se avsnitt nedan) ska implementeras i xpc-target istället. Lastbilen i guren är den riktiga lastbilen som tar in information från sin omgivning med sina sensorer där informationen sedan går via CANbussen (se avsnitt nedan) vidare till regulator och estimator i xpc-target. Alix kommer genom wi att skicka ut information från xpc-target samtidigt som den läser in information från de andra fordonen i kolonnen, denna information kommer sedan gå via CAN-bussen ner till lastbilen som guren visar. Nedan följer en detaljbeskrivning för komponenterna i Figur p Alix Ethernet GPS USB WSU (Knatte) USB Ethernet Laptop (styrning/ övervakning) CAN Regulator (xpc-target) Ethernet Laptop (xpc host) CAN CAN-Gateway CAN Lastbil Figur 2: Bild över hårdvarans kommunikation Systemskiss 2
 vidare till regulator och estimator i xpc-target.")
7 Alix Alix är en dator som i det här projektet kommer att fungera som ett externt trådlöst nätverkskort i systemet där data skickas och tas emot. Med hjälp av Alix får lastbilen information om sin position i förhållande till de andra fordonen i kolonnen. Den standard som används för trådlös överföring är p. Alix skickar ut information enligt GCDC Interaction Protocol [2] WSU WSU (Wireless Safety Unit) är en dator som används för att ta in och estimera data från Alix och data från den egna lastbilen via xpc-target Regulator och estimator För att lastbilen ska hålla sin hastighet och ett bra säkerhetsavstånd till deltagarna i kolonnen måste tillstånd såsom hastighet och position regleras med en regulator. Dessa tillstånd kommer från estimatorn som tar emot sensordata från lastbilen som den estimerar till insignaldata till regulatorn. Lastbilens regulator och estimator kommer programmeras i Simulink som med hjälp utav xpc-target gör det möjligt att simulera och testa Simulink- och stateow-modeller i realtid på den fysiska hårdvaran. Den dator som kopplas till xpc-target kan utöver implementeringen av estimatorn och regulatorn även användas för övervakning/debugging CAN-Gateway CAN-bussen används för att skicka information till och från lastbilen. På CAN-bussen skickas information från lastbilen såsom hastighet och radarinformation samtidigt som börvärden tas emot från regulatorn. CAN står för control area network som är ett bussystem som ofta används i fordon. CAN ställer krav på snabbhet och tålighet, vilket passar bra i fordonsindustrin där den kan användas i t.ex. styrning för växellådor och i krockkuddesystem Lastbilens sensorer Lastbilen som systemet är tänkt att testas på är utrustad med ett antal sensorer för att återge en bild av verkligheten. De sensorer som kan komma till användning är de avståndssensorer som lastbilen är utrustad med såsom radar. Lastbilens GPS används för att ta reda på lastbilens positionering men kan även användas till att skatta lastbilens hastighet. Lastbilen har även sensorer som mäter dess hastighet och accelerationer i longitudell och lateral led. För att mäta hastigheter kan lastbilens tachometer användas medans lastbilens accelerometrar kan användas för att ta reda på lastbilens accelerationer. Som exempel visas i Figur 3 att lastbilen med sin radar kan detektera två fordon framför sig samt fordon i andra vägler än den lastbilen kör i. 2.2 Regulator och estimator Det ska konstrueras en regulator och estimator till lastbilen för att få lastbilen att uppföra sig i en kolonn på ett sådant sätt att luftmotståndet minimeras. Regulatorn ska även se till att lastbilen inte kör för ryckigt då detta skulle påverka bränsleförbrukningen negativt. Säkerhetsaspekten är även den viktig, då inga olyckor får ske. Därför måste avstånd alltid skattas och hållas av lastbilen samtidigt som de tillåtna hastigheterna under körning ska hållas. Det nns beskrivet i vilka scenarion som regulatorn ska kunna uppfatta och agera på enligt CoACT 2012 [1]. Här ingår bland annat scenarion med fordon som ansluter och lämnar kolonnen. Regulatorn och estimatorn kommer att konstrueras i Simulink för att sedan implementeras i xpc-target som visas i Figur 2. Systemskiss 3
![Alix skickar ut information enligt GCDC Interaction Protocol [2]. 2.1.](/docs-images/46/5701712/images/page_7.jpg "2 WSU WSU (Wireless Safety Unit) är en dator som används för att ta in och estimera data från Alix och data från den egna lastbilen via xpc-target. 2.1.")

8 Figur 3: Schematisk bild som visar den egna lastbilen (i mörkgrått) och representation av de radarsignaler som levereras genom CAN och deras relativa positioner. 2.3 Simulator I projektet kommer en simulationsmiljö att byggas i Simulink. Denna simulationsmiljö ska efterlikna ett verkligt scenario där en av lastbilarna är projektgruppens med implementerad regulator och estimator. Denna lastbil kör i kolonn tillsammans med andra lastbilar som kommer vara lastbilens omgivning som även den kommer att implementeras i Simulink. Denna omgivning ska först och främst utvecklas för att kunna utföra platooning acceptabelt samtidigt som det ska nnas möjlighet till vidareutveckling i framtiden Mjukvarusimulering I simulationsmiljön ska lastbilsmodeller skapas utgående från verkliga fysikaliska samband där följande fenomen ska tas med: fordonsframdrivning rullmotstånd gravitationskraft luftmotstånd Dessa samband kan ställas upp med kända ekvationer som därefter kan implementeras i Simulink. I simulationsmiljön ska deltagarna i den simulerade kolonnen ha parametrar som ska kunnas ställas in av användaren. Dessa parametrar ska vara: lastbilarnas vikt Systemskiss 4

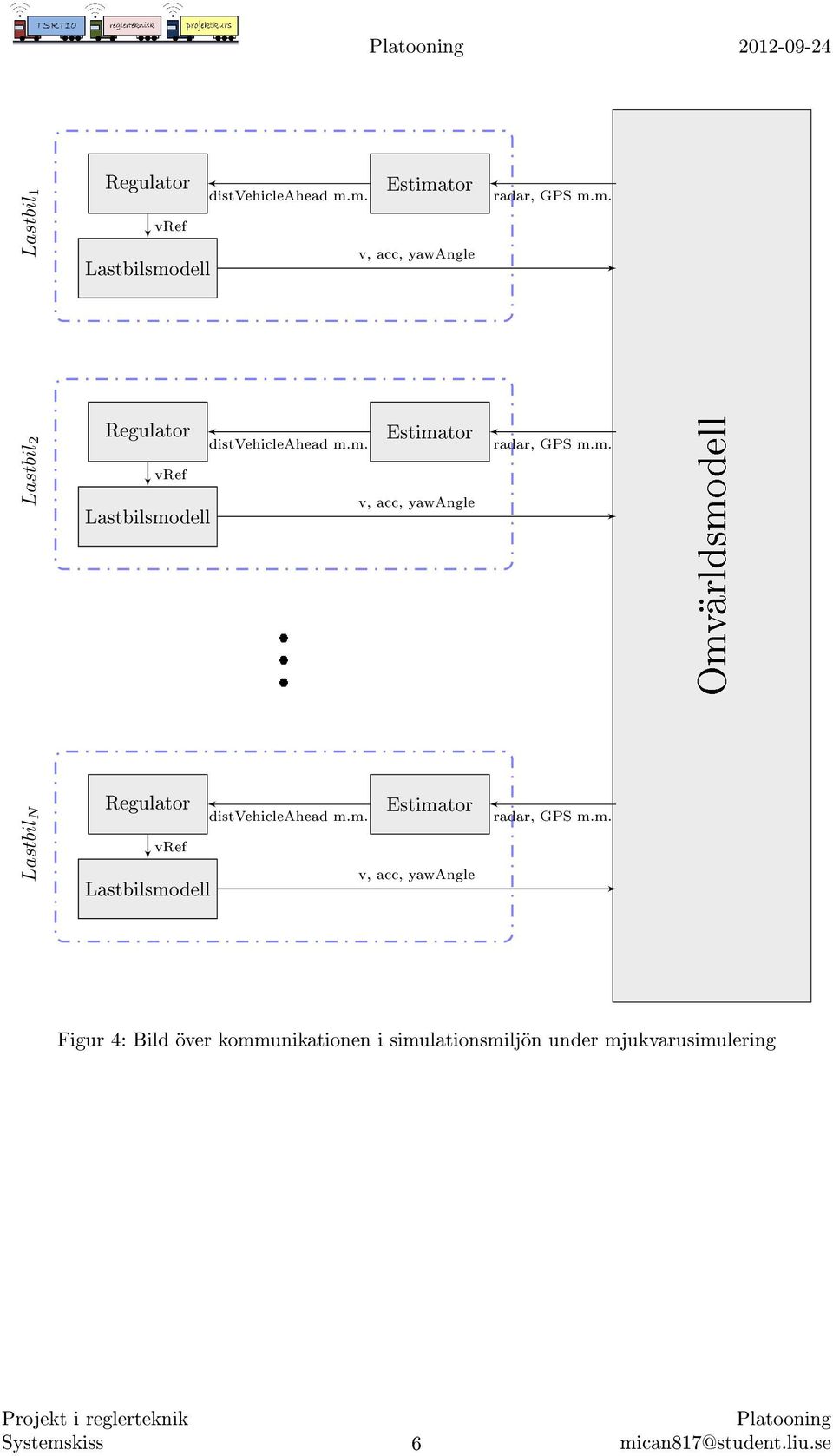
9 lastbilarnas aerodynamiska egenskaper lastbilarnas rullmotstånd lastbilarnas bromsegenskaper lastbilarnas motorskaraktäristik såsom eekt och moment Simulationsmiljön ska också ha parametrar som ska kunna justeras av användaren, dessa ska inledningsvis vara: hastighetsprolen vägens lutning Även dessa parametrar kommer kunna sättas in i kända fysikaliska ekvationer och på så sätt efterlikna en modell av en verklig kolonn som kör på en raksträcka. Under simulering ska användaren kunna läsa av fysikaliska variabler såsom hastighet och acceleration. Det ska även nnas plottar som visar dessa fysikaliska storheter. Användaren ska även kunna läsa av de värden som tas fram från regulatorn och estimatorn, där även regulatorparametrar ska kunna ställas in. Figur 4 visar hur simuleringen är tänkt att fungera i Simulink, där man även ser vilka signaler som de olika blocken kommer att ha som insignal och utsignal. Lastbilsmodellerna här är endast fordonsdynamiska modeller som sänder ut nya positioner, hastigheter m.m. till omvärldsmodellen. Omvärldsmodellen används för kommunikationen mellan de olika lastbilarna. Omvärldsmodellen innehåller även information om vägen, såsom riktning och lutning. I Figur 4 ser man att estimatorn får sensordata från omgivningen såsom de andra lastbilarnas position. Med denna information kan estimatorn estimera t.ex avståndet till framförvarande lastbil (distvehicleahead i bild). Med estimerad data räknar regulatorn ut en hastighet för lastbilen att hålla (vref i bild). Lastbilen tar in denna hastighet samtidigt som den berättar för omgivningen vad den har för hastighet och accelereration m.m. Systemskiss 5

10 Lastbil1 Regulator vref Lastbilsmodell distvehicleahead m.m. Estimator v, acc, yawangle radar, GPS m.m. Lastbil2 Regulator vref Lastbilsmodell distvehicleahead m.m.... Estimator v, acc, yawangle radar, GPS m.m. Omvärldsmodell LastbilN Regulator vref Lastbilsmodell distvehicleahead m.m. Estimator v, acc, yawangle radar, GPS m.m. Figur 4: Bild över kommunikationen i simulationsmiljön under mjukvarusimulering Systemskiss 6
11 Hårdvarusimulering Ett krav på systemet är att den ska kunna genomföra en HIL (Hardware In the Loop) simulering. Detta genomförs genom att låta den skapade modellen för den egna lastbilen kommunicera med den implementerade omgivningen genom ett trådlöst nätverk. Hur detta ska utföras visas i Figur 5. Bilden visar att i simuleringsmiljön nns en lastbil samt dess omgivning. Lastbilen i simuleringsmiljön kommunicerar via CAN med xpc-target som innehåller både regulator och estimator. Vidare skickar Alix ut information till de övriga fordonen i kolonnen. Figur 6 visar hur det ser ut för en platoon med tre lastbilar. Lastbilarna åker tillsammans i en kolonn där alla skickar ut data om hastighet och positionering för att de andra deltagarna ska ta emot denna och anpassa hastigheten. wi p System i lastbil Alix CAN/UDP xpc target CAN Omvärldsmodell Lastbil Simuleringsmiljö Figur 5: Hardware In the Loop simuleringsmiljö Systemskiss 7

12 p Alix Alix Alix CAN/UDP CAN/UDP CAN/UDP xpc target xpc target xpc target CAN CAN CAN Lastbil Lastbil Lastbil Sensorer Omgivning Referenser Figur 6: Bild över kommunikationen i en platoon med tre lastbilar [1] CoACT 2012 Scenarios for the nal event and testing workshop. Erhållen från Erik Frisk, Forsonssystem, ISY. [2] The GCDC Interaction Protocol. Interaction_Protocol. [3] Michael Andersson, Per Svennerbrant. Teknisk dokumentation - styrsystem för platooning. Technical report, ISY fordonssystem, Systemskiss 8
![Figur 6: Bild över kommunikationen i en platoon med tre lastbilar [1] CoACT 2012 Scenarios for the nal event and testing workshop.](/docs-images/46/5701712/images/page_12.jpg "Erhållen från Erik Frisk, Forsonssystem, ISY. [2] The GCDC Interaction Protocol. http://www.gcdc.")
Projektplan. Michael Andersson Version 1.0: Status. Platooning Granskad TST Godkänd Erik Frisk
 2012-09-24 Projektplan Michael Andersson Version 1.0: 2012-09-24 Status Granskad TST 2012-09-19 Godkänd Erik Frisk 2012-09-24 Projektplan i 2012-09-24 Projektidentitet, TSRT10, HT2012, Tekniska högskolan
2012-09-24 Projektplan Michael Andersson Version 1.0: 2012-09-24 Status Granskad TST 2012-09-19 Godkänd Erik Frisk 2012-09-24 Projektplan i 2012-09-24 Projektidentitet, TSRT10, HT2012, Tekniska högskolan
Systemskiss. Joachim Lundh TSRT10 - SEGWAY 6 december 2010 Version 1.0. Status:
 Systemskiss Joachim Lundh TSRT10 - SEGWAY 6 december 2010 Version 1.0 Status: Granskad Alla 6 december 2010 Godkänd Markus (DOK) 6 december 2010 PROJEKTIDENTITET Segway, HT 2010 Tekniska högskolan vid
Systemskiss Joachim Lundh TSRT10 - SEGWAY 6 december 2010 Version 1.0 Status: Granskad Alla 6 december 2010 Godkänd Markus (DOK) 6 december 2010 PROJEKTIDENTITET Segway, HT 2010 Tekniska högskolan vid
Systemskiss. LiTH Kamerabaserat Positioneringssystem för Hamnkranar Mikael Ögren Version 1.0. Status
 Mikael Ögren Version 1.0 Granskad Status Godkänd 1 PROJEKTIDENTITET 09/HT, CaPS Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mohsen Alami designansvarig(des) 073-7704709 mohal385@student.liu.se
Mikael Ögren Version 1.0 Granskad Status Godkänd 1 PROJEKTIDENTITET 09/HT, CaPS Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mohsen Alami designansvarig(des) 073-7704709 mohal385@student.liu.se
Systemskiss. Redaktör: Anders Toverland Version 1.0. Status. LiTH Fordonssimulator. Granskad Godkänd. TSRT71 Anders Toverland
 Systemskiss Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET Grupp 1, 2005/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Anders Wikström Kvalitetsansvarig
Systemskiss Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET Grupp 1, 2005/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Anders Wikström Kvalitetsansvarig
Systemskiss. LiTH. Autopositioneringssystem för utlagda undervattenssensorer Erik Andersson Version 1.0. Status
 Autopositioneringssystem för utlagda undervattenssensorer 2007-02-05 LiTH Systemskiss Erik Andersson Version 1.0 Status Granskad Godkänd DOK Henrik Ohlsson Systemskiss10.pdf 1 Autopositioneringssystem
Autopositioneringssystem för utlagda undervattenssensorer 2007-02-05 LiTH Systemskiss Erik Andersson Version 1.0 Status Granskad Godkänd DOK Henrik Ohlsson Systemskiss10.pdf 1 Autopositioneringssystem
Testspecifikation. Henrik Hagelin TSRT10 - SEGWAY 6 december 2010 Version 1.0. Status:
 Testspecifikation Henrik Hagelin TSRT10 - SEGWAY 6 december 2010 Version 1.0 Status: Granskad Alla 6 december 2010 Godkänd DOK, PL 6 december 2010 PROJEKTIDENTITET Segway, HT 2010 Tekniska högskolan vid
Testspecifikation Henrik Hagelin TSRT10 - SEGWAY 6 december 2010 Version 1.0 Status: Granskad Alla 6 december 2010 Godkänd DOK, PL 6 december 2010 PROJEKTIDENTITET Segway, HT 2010 Tekniska högskolan vid
HARALD. Systemskiss. Version 0.3 Redaktör: Patrik Johansson Datum: 20 februari 2006. Status
 HARALD Systemskiss Version 0.3 Redaktör: Patrik Johansson Datum: 20 februari 2006 Status Granskad Johan Sjöberg 2006-02-10 Godkänd - yyyy-mm-dd Projektidentitet Gruppens e-post: Beställare: Kund: Kursansvarig:
HARALD Systemskiss Version 0.3 Redaktör: Patrik Johansson Datum: 20 februari 2006 Status Granskad Johan Sjöberg 2006-02-10 Godkänd - yyyy-mm-dd Projektidentitet Gruppens e-post: Beställare: Kund: Kursansvarig:
Systemskiss. Självetablerande sensornätverk med 3G och GPS. Version 0.2. Christian Östman Datum: 15 maj 2008
 Systemskiss Självetablerande sensornätverk med 3G och GPS Version 0.2 Christian Östman Datum: 15 maj 2008 Status Granskad Johan Lundström 2008-02-08 Godkänd Projektidentitet Gruppens e-post: Hemsida: Beställare:
Systemskiss Självetablerande sensornätverk med 3G och GPS Version 0.2 Christian Östman Datum: 15 maj 2008 Status Granskad Johan Lundström 2008-02-08 Godkänd Projektidentitet Gruppens e-post: Hemsida: Beställare:
LiTH 7 december 2011. Optimering av hjullastare. Testplan. Per Henriksson Version 1.0. LIPs. TSRT10 testplan.pdf WHOPS 1. tsrt10-vce@googlegroups.
 Testplan Per Henriksson Version 1.0 1 Status Granskad - Godkänd - 2 Projektidentitet Optimering av Hjullastare HT2011 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-post Per Henriksson Projektledare
Testplan Per Henriksson Version 1.0 1 Status Granskad - Godkänd - 2 Projektidentitet Optimering av Hjullastare HT2011 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-post Per Henriksson Projektledare
Systemskiss. LiTH AMASE Accurate Multipoint Acquisition from Stereovision Equipment. Jon Månsson Version 1.0
 2006-02-15 Systemskiss Jon Månsson Version 1.0 Granskad Godkänd TSBB51 LIPs John Wood johha697@student.liu.se 1 PROJEKTIDENTITET VT2006, Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mikael
2006-02-15 Systemskiss Jon Månsson Version 1.0 Granskad Godkänd TSBB51 LIPs John Wood johha697@student.liu.se 1 PROJEKTIDENTITET VT2006, Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mikael
Testplan Erik Jakobsson Version 1.1
 Erik Jakobsson Version 1.1 Granskad Status Godkänd 1 PROJEKTIDENTITET 09/HT, Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mohsen Alami designansvarig (DES) 073-7704709 mohal385@student.liu.se
Erik Jakobsson Version 1.1 Granskad Status Godkänd 1 PROJEKTIDENTITET 09/HT, Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mohsen Alami designansvarig (DES) 073-7704709 mohal385@student.liu.se
Projektplan. LiTH Reglering av Avgaser, Trottel och Turbo 2008-02-11. Fredrik Petersson Version 1.0. Status. Reglerteknisk Projektkurs RATT LIPs
 Fredrik Petersson Version 1.0 Status Granskad 2008-02-11 NL, PA Godkänd 1 2 PROJEKTIDENTITET VT 2008, RATT-Gruppen Linköpings tekniska högskola, ISY- Fordonssystem Namn Ansvar Telefon E-post Daniel Ahlberg
Fredrik Petersson Version 1.0 Status Granskad 2008-02-11 NL, PA Godkänd 1 2 PROJEKTIDENTITET VT 2008, RATT-Gruppen Linköpings tekniska högskola, ISY- Fordonssystem Namn Ansvar Telefon E-post Daniel Ahlberg
Testplan Autonom truck
 Testplan Autonom truck Version 1.1 Redaktör: Joar Manhed Datum: 20 november 2018 Status Granskad Kim Byström 2018-11-20 Godkänd Andreas Bergström 2018-10-12 Projektidentitet Grupp E-post: Hemsida: Beställare:
Testplan Autonom truck Version 1.1 Redaktör: Joar Manhed Datum: 20 november 2018 Status Granskad Kim Byström 2018-11-20 Godkänd Andreas Bergström 2018-10-12 Projektidentitet Grupp E-post: Hemsida: Beställare:
LiTH, Reglerteknik Saab Dynamics. Testplan Collision avoidance för autonomt fordon Version 1.0
 LiTH, Reglerteknik Saab Dynamics Testplan Collision avoidance för autonomt fordon Version 1.0 Torbjörn Lindström 3 maj 2005 Granskad Godkänd Collision avoidance för autonomt fordon i Sammanfattning Testplan
LiTH, Reglerteknik Saab Dynamics Testplan Collision avoidance för autonomt fordon Version 1.0 Torbjörn Lindström 3 maj 2005 Granskad Godkänd Collision avoidance för autonomt fordon i Sammanfattning Testplan
Testprotokoll. Redaktör: Sofie Dam Version 0.1. Status. Planering och sensorfusion för autonom truck Granskad Dokumentansvarig - Godkänd
 Redaktör: Sofie Dam Version 0.1 Status Granskad Dokumentansvarig - Godkänd 1 GruppTruck Projektidentitet 2017/HT, GruppTruck Tekniska högskolan vid Linköpings universitet, ISY Gruppdeltagare Namn Ansvar
Redaktör: Sofie Dam Version 0.1 Status Granskad Dokumentansvarig - Godkänd 1 GruppTruck Projektidentitet 2017/HT, GruppTruck Tekniska högskolan vid Linköpings universitet, ISY Gruppdeltagare Namn Ansvar
Systemskiss. LiTH Autonom bandvagn med stereokamera 2010-09-24. Gustav Hanning Version 1.0. Status. TSRT10 8Yare LIPs. Granskad
 Gustav Hanning Version 1.0 Status Granskad Godkänd Jonas Callmer 2010-09-24 1 PROJEKTIDENTITET 2010/HT, 8Yare Linköpings tekniska högskola, institutionen för systemteknik (ISY) Namn Ansvar Telefon E-post
Gustav Hanning Version 1.0 Status Granskad Godkänd Jonas Callmer 2010-09-24 1 PROJEKTIDENTITET 2010/HT, 8Yare Linköpings tekniska högskola, institutionen för systemteknik (ISY) Namn Ansvar Telefon E-post
Testplan. Redaktör: Sofie Dam Version 0.1. Status. Planering och sensorfusion för autonom truck Granskad Dokumentansvarig - Godkänd
 Redaktör: Sofie Dam Version 0.1 Status Granskad Dokumentansvarig - Godkänd 1 GruppTruck Projektidentitet 2017/HT, GruppTruck Tekniska högskolan vid Linköpings universitet, ISY Gruppdeltagare Namn Ansvar
Redaktör: Sofie Dam Version 0.1 Status Granskad Dokumentansvarig - Godkänd 1 GruppTruck Projektidentitet 2017/HT, GruppTruck Tekniska högskolan vid Linköpings universitet, ISY Gruppdeltagare Namn Ansvar
Kravspecifikation. LiTH Segmentering av MR-bilder med ITK Anders Eklund Version 1.0. Status
 2006-02-02 Kravspecifikation Version.0 Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 2006-02-02 PROJEKTIDENTITET MCIV 2006 VT Linköpings Tekniska Högskola, CVL Namn Ansvar Telefon
2006-02-02 Kravspecifikation Version.0 Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 2006-02-02 PROJEKTIDENTITET MCIV 2006 VT Linköpings Tekniska Högskola, CVL Namn Ansvar Telefon
Kravspecifikation. LIPs. LiTH Reglering av Avgaser, Trottel och Turbo 2008-04-23. Niclas Lerede Version 1.2. Status. Reglerteknisk Projektkurs
 Niclas Lerede Version.2 Status Granskad 2008-04-23 PA Godkänd PROJEKTIDENTITET VT 2008, -Gruppen Linköpings tekniska högskola, ISY- Fordonssystem Namn Ansvar Telefon E-post Daniel Ahlberg ansvarig delsystem
Niclas Lerede Version.2 Status Granskad 2008-04-23 PA Godkänd PROJEKTIDENTITET VT 2008, -Gruppen Linköpings tekniska högskola, ISY- Fordonssystem Namn Ansvar Telefon E-post Daniel Ahlberg ansvarig delsystem
HARALD Testprotokoll
 HARALD Testprotokoll Version 0.2 Redaktör: Patrik Sköld Datum: 9 maj 2006 Status Granskad Johan Sjöberg 2006-05-09 Godkänd - yyyy-mm-dd Projektidentitet Gruppens e-post: Beställare: Kund: Kursansvarig:
HARALD Testprotokoll Version 0.2 Redaktör: Patrik Sköld Datum: 9 maj 2006 Status Granskad Johan Sjöberg 2006-05-09 Godkänd - yyyy-mm-dd Projektidentitet Gruppens e-post: Beställare: Kund: Kursansvarig:
LiTH. WalkCAM 2007/05/15. Testplan. Mitun Dey Version 1.0. Status. Granskad. Godkänd. Reglerteknisk projektkurs WalkCAM LIPs
 Testplan Mitun Dey Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Reglerteknisk projektkurs, WalkCAM, 2007/VT Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Henrik Johansson Projektledare
Testplan Mitun Dey Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Reglerteknisk projektkurs, WalkCAM, 2007/VT Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Henrik Johansson Projektledare
Kravspecifikation. Vidareutveckling av Optimal Styrning av Radiostyrd Racerbil. Version 1.1 Joel Lejonklou 26 november 2012
 Kravspecifikation Vidareutveckling av Optimal Styrning av Radiostyrd Racerbil Version. Joel Lejonklou 26 november 202 Status Granskad Simon Eiderbrant 26 November 202 Godkänd Kurskod: TSRT0 E-post: joele569@student.liu.se
Kravspecifikation Vidareutveckling av Optimal Styrning av Radiostyrd Racerbil Version. Joel Lejonklou 26 november 202 Status Granskad Simon Eiderbrant 26 November 202 Godkänd Kurskod: TSRT0 E-post: joele569@student.liu.se
Systemskiss Minröjningsbandvagn
 Systemskiss Minröjningsbandvagn Version 1.0 Utgivare: Emmeline Kemperyd Datum: 19 september 2013 Status Granskad Anton Pettersson 2013-09-19 Godkänd Projektidentitet Gruppens e-post: Hemsida: Beställare:
Systemskiss Minröjningsbandvagn Version 1.0 Utgivare: Emmeline Kemperyd Datum: 19 september 2013 Status Granskad Anton Pettersson 2013-09-19 Godkänd Projektidentitet Gruppens e-post: Hemsida: Beställare:
Systemskiss. Status. David Sandberg, Tobias Lundqvist, Rasmus Dewoon, Marcus Wirebrand Version 1.0. Granskad Godkänd
 Systemskiss David Sandberg, Tobias Lundqvist, Rasmus Dewoon, Marcus Wirebrand Version 1.0 Status Granskad Godkänd Projektidentitet Grupp 2, 2010/HT Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon
Systemskiss David Sandberg, Tobias Lundqvist, Rasmus Dewoon, Marcus Wirebrand Version 1.0 Status Granskad Godkänd Projektidentitet Grupp 2, 2010/HT Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon
Testplan. Vidareutveckling av Optimal Styrning av Radiostyrd Racerbil. Version 1.1 Fredrik Karlsson 26 november Granskad JL, FK 26 november 2012
 Testplan Vidareutveckling av Optimal Styrning av Radiostyrd Racerbil Version. Fredrik Karlsson 26 november 202 Status Granskad JL, FK 26 november 202 Godkänd Kurskod: TSRT0 E-post: freca476@student.liu.se
Testplan Vidareutveckling av Optimal Styrning av Radiostyrd Racerbil Version. Fredrik Karlsson 26 november 202 Status Granskad JL, FK 26 november 202 Godkänd Kurskod: TSRT0 E-post: freca476@student.liu.se
Projektdirektiv Oskar Ljungqvist Sida 1. Kund/Examinator: Daniel Axehill, Reglerteknik/LiU
 2018-08-30 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering, ISY Student, ISY Läsperiod 1-2, HT 2018. Projektet klart senast vid projektkonferensen. Löpande rapportering:
2018-08-30 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering, ISY Student, ISY Läsperiod 1-2, HT 2018. Projektet klart senast vid projektkonferensen. Löpande rapportering:
Kravspecifikation. Estimering och övervakning av avgasmottryck i en dieselmotor. Version 1.2 Dokumentansvarig: Gustav Hedlund Datum: 24 april 2008
 Kravspecifikation Estimering och övervakning av avgasmottryck i en dieselmotor Version.2 Dokumentansvarig: Gustav Hedlund Datum: 24 april 2008 Granskad Godkänd Status Kurskod: TSRT7 Dokument: Kravspec.pdf
Kravspecifikation Estimering och övervakning av avgasmottryck i en dieselmotor Version.2 Dokumentansvarig: Gustav Hedlund Datum: 24 april 2008 Granskad Godkänd Status Kurskod: TSRT7 Dokument: Kravspec.pdf
LIPs Daniel Axehill ChrKr Projektdirektiv_Saab_v3 CKr
 Daniel Axehill 2006-01-19 Sida 1 Projektnamn Beställare Daniel Axehill, ISY Projektledare Student Projektbeslut Torbjörn Crona, Daniel Axehill Projekttid Läsperiod 3-4, vårterminen 2006. Projektet klart
Daniel Axehill 2006-01-19 Sida 1 Projektnamn Beställare Daniel Axehill, ISY Projektledare Student Projektbeslut Torbjörn Crona, Daniel Axehill Projekttid Läsperiod 3-4, vårterminen 2006. Projektet klart
Projektplan. LiTH Segmentering av MR-bilder med ITK Anders Eklund. Version 1.0. Status. Bilder och grafik projektkurs, CDIO MCIV LIPs
 Segmentering av MR-bilder med ITK 2006-02-02 Projektplan Version 1.0 Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 1 PROJEKTIDENTITET MCIV 2006 VT Linköpings Tekniska Högskola,
Segmentering av MR-bilder med ITK 2006-02-02 Projektplan Version 1.0 Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 1 PROJEKTIDENTITET MCIV 2006 VT Linköpings Tekniska Högskola,
Användarhandledning. Redaktör: Patrik Molin Version 1.0. Mobile Scout. Status. LiTH Granskad Godkänd. TSRT71 Patrik Molin
 Användarhandledning Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET 2009/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Martin Larsson Projektledare
Användarhandledning Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET 2009/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Martin Larsson Projektledare
TESTPLAN. Markus Vilhelmsson. Version 1.3. Status Detektion och felisolering i förbränningsmotor
 TESTPLAN Markus Vilhelmsson Version 1.3 Status Granskad Godkänd LIPS Kravspecifikation i bohli890@student.liu.se PROJEKTIDENTITET HT15, Detektion och felisolering i er Linköpings universitet, Institutionen
TESTPLAN Markus Vilhelmsson Version 1.3 Status Granskad Godkänd LIPS Kravspecifikation i bohli890@student.liu.se PROJEKTIDENTITET HT15, Detektion och felisolering i er Linköpings universitet, Institutionen
LIPs Fredrik Ljungberg ChrKr Projektdirektiv18_ROV.doc CKr
 Fredrik Ljungberg 2018-08-28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Parter Projektets bakgrund och Remotely Operated Underwater Vehicle Fredrik Ljungberg, ISY
Fredrik Ljungberg 2018-08-28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Parter Projektets bakgrund och Remotely Operated Underwater Vehicle Fredrik Ljungberg, ISY
Testprotokoll Autonom målföljning med quadcopter
 Version 1.0 Robo Ptarmigan 3 december 2015 Status Granskad HC 2015-11-29 Godkänd Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare: Handledare: karlo343@student.liu.se
Version 1.0 Robo Ptarmigan 3 december 2015 Status Granskad HC 2015-11-29 Godkänd Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare: Handledare: karlo343@student.liu.se
Testplan Racetrack 2015
 Testplan Racetrack 205 Version.0 Författare: Henrik Bäckman Datum: 7 december 205 Status Granskad OH, HB 205-0-06 Godkänd Projektidentitet Grupp E-mail: Hemsida: Beställare: Kund: Examinator: Projektledare:
Testplan Racetrack 205 Version.0 Författare: Henrik Bäckman Datum: 7 december 205 Status Granskad OH, HB 205-0-06 Godkänd Projektidentitet Grupp E-mail: Hemsida: Beställare: Kund: Examinator: Projektledare:
LiTH Segmentering av MR-bilder med ITK Efterstudie MCIV. Anders Eklund. Status
 Segmentering av MR-bilder med ITK 2006-05-15 Efterstudie MCIV Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 1 Segmentering av MR-bilder med ITK 2006-05-15 PROJEKTIDENTITET MCIV
Segmentering av MR-bilder med ITK 2006-05-15 Efterstudie MCIV Status Granskad Godkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 1 Segmentering av MR-bilder med ITK 2006-05-15 PROJEKTIDENTITET MCIV
Projektplan. Modellbaserad diagnos av motortestcell 07-05-10. Fredrik Johansson Version 1.0. Status. TSRT71 Modellbaserad diagnos av motortestcell IPs
 07-05-10 Projektplan Version 1.0 Status Granskad Godkänd TSRT71 Modellbaserad diagnos av motortestcell IPs PPDiagnos10.odt 1 PROJEKTIDENTITET Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-post
07-05-10 Projektplan Version 1.0 Status Granskad Godkänd TSRT71 Modellbaserad diagnos av motortestcell IPs PPDiagnos10.odt 1 PROJEKTIDENTITET Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-post
HARALD. Version 0.2 Redaktör: Patrik Johansson Datum: 8 maj 2006. Status. Granskad - yyyy-mm-dd Godkänd - yyyy-mm-dd
 HARALD Användarhandledning Version 0.2 Redaktör: Patrik Johansson Datum: 8 maj 2006 Status Granskad - yyyy-mm-dd Godkänd - yyyy-mm-dd Projektidentitet Gruppens e-post: Hemsida: Beställare: Kund: Kursansvarig:
HARALD Användarhandledning Version 0.2 Redaktör: Patrik Johansson Datum: 8 maj 2006 Status Granskad - yyyy-mm-dd Godkänd - yyyy-mm-dd Projektidentitet Gruppens e-post: Hemsida: Beställare: Kund: Kursansvarig:
Testplan. LiTH. Autopositioneringssystem för utlagda undervattenssensorer Martin Skoglund Version 1.1. Status
 Autopositioneringssystem för utlagda undervattenssensorer 2007-05-04 LiTH Testplan Martin Skoglund Version 1.1 Status Granskad Godkänd testplan1.1.pdf 1 PROJEKTIDENTITET Autopositionering för utlagda undervattenssensorer,
Autopositioneringssystem för utlagda undervattenssensorer 2007-05-04 LiTH Testplan Martin Skoglund Version 1.1 Status Granskad Godkänd testplan1.1.pdf 1 PROJEKTIDENTITET Autopositionering för utlagda undervattenssensorer,
LIPs Isak Nielsen ChrKr Projektdirektiv13_ROV.doc CKr
 Isak Nielsen 2013/08/28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Remotely Operated Underwater Vehicle Isak Nielsen, ISY Student Micael Derelöv och Isak Nielsen
Isak Nielsen 2013/08/28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Remotely Operated Underwater Vehicle Isak Nielsen, ISY Student Micael Derelöv och Isak Nielsen
Testplan. Flygande Autonomt Spaningsplan. Version 1.0. Dokumentansvarig: Henrik Abrahamsson Datum: 14 mars Status.
 Flygande Autonomt Spaningsplan Version 1.0 Dokumentansvarig: Henrik Abrahamsson Datum: 14 mars 2008 Status Granskad Godkänd Projektidentitet Hemsida: Kund: http://www.isy.liu.se/edu/projekt/tsrt71/2008/flygproj2008/
Flygande Autonomt Spaningsplan Version 1.0 Dokumentansvarig: Henrik Abrahamsson Datum: 14 mars 2008 Status Granskad Godkänd Projektidentitet Hemsida: Kund: http://www.isy.liu.se/edu/projekt/tsrt71/2008/flygproj2008/
LiTH Autonom styrning av mobil robot 2007-02-15. Projektplan. Martin Elfstadius & Fredrik Danielsson. Version 1.0
 Projektplan Martin Elfstadius & Fredrik Danielsson Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar
Projektplan Martin Elfstadius & Fredrik Danielsson Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar
Projektplan. LiTH AMASE 2006-02-15 Accurate Multipoint Acquisition from Stereovision Equipment. Johan Hallenberg Version 1.0
 AMASE 2006-02-15 Projektplan Johan Hallenberg Version 1.0 Granskad Godkänd 1 PROJEKTIDENTITET VT2006, AMASE Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mikael Karelid kundansvarig (KUN)
AMASE 2006-02-15 Projektplan Johan Hallenberg Version 1.0 Granskad Godkänd 1 PROJEKTIDENTITET VT2006, AMASE Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mikael Karelid kundansvarig (KUN)
KRAVSPECIFIKATION. Pontus Brånäs Wojtek Thorn Version 1.1. Status
 KRAVSPECIFIKATION Pontus Brånäs Wojtek Thorn Version 1.1 Status Signatur Datum Granskad 2015-01-22 Godkänd LIPS Kravspecifikation i projektgrupppontek@outlook.com PROJEKTIDENTITET Projektgrupp 2, 2014/2015,
KRAVSPECIFIKATION Pontus Brånäs Wojtek Thorn Version 1.1 Status Signatur Datum Granskad 2015-01-22 Godkänd LIPS Kravspecifikation i projektgrupppontek@outlook.com PROJEKTIDENTITET Projektgrupp 2, 2014/2015,
LiTH. WalkCAM 2007/05/15. Testrapport. Mitun Dey Version 1.0. Status. Granskad. Godkänd. Reglerteknisk projektkurs WalkCAM LIPs
 Testrapport Mitun Dey Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Reglerteknisk projektkurs, WalkCAM, 2007/VT Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Henrik Johansson Projektledare
Testrapport Mitun Dey Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET Reglerteknisk projektkurs, WalkCAM, 2007/VT Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Henrik Johansson Projektledare
Kravspecifikation. LiTH AMASE Accurate Multipoint Acquisition from Stereo vision Equipment. John Wood Version 1.0.
 AMASE 2006-02-5 Accurate Multipoint Acquisition from Stereo vision Equipment Kravspecifikation John Wood Version.0 Granskad Godkänd Status TSBB5 AMASE LIPs John Wood johha697@student.liu.se Kravspec_0.3.odt
AMASE 2006-02-5 Accurate Multipoint Acquisition from Stereo vision Equipment Kravspecifikation John Wood Version.0 Granskad Godkänd Status TSBB5 AMASE LIPs John Wood johha697@student.liu.se Kravspec_0.3.odt
Testprotokoll Racetrack 2015
 Testprotokoll Racetrack 205 Version.0 Författare: Henrik Bäckman Datum: 8 december 205 Status Granskad LK, HB 205--26 Godkänd Projektidentitet Grupp E-mail: Hemsida: Beställare: Kund: Examinator: Projektledare:
Testprotokoll Racetrack 205 Version.0 Författare: Henrik Bäckman Datum: 8 december 205 Status Granskad LK, HB 205--26 Godkänd Projektidentitet Grupp E-mail: Hemsida: Beställare: Kund: Examinator: Projektledare:
Kravspecifikation. LiTH Autonom bandvagn med stereokamera Gustav Hanning Version 1.0. Status. TSRT10 8Yare LIPs.
 Autonom bandvagn med stereokamera 00-09-4 Gustav Hanning Version.0 Status Granskad Godkänd Jonas Callmer 00-09-4 TSRT0 8Yare LIPs Autonom bandvagn med stereokamera 00-09-4 PROJEKTIDENTITET 00/HT, 8Yare
Autonom bandvagn med stereokamera 00-09-4 Gustav Hanning Version.0 Status Granskad Godkänd Jonas Callmer 00-09-4 TSRT0 8Yare LIPs Autonom bandvagn med stereokamera 00-09-4 PROJEKTIDENTITET 00/HT, 8Yare
Kravspecifikation. Självetablerande sensornätverk med 3G och GPS. Version 1.0. Christian Östman Datum: 12 maj 2008
 Kravspecifikation Självetablerande sensornätverk med 3G och GPS Version.0 Christian Östman Datum: 2 maj 2008 Status Granskad Christian 2008-02-08 Godkänd Kurskod: TSRT7 Ansvarigs e-post: chros822@student.liu.se
Kravspecifikation Självetablerande sensornätverk med 3G och GPS Version.0 Christian Östman Datum: 2 maj 2008 Status Granskad Christian 2008-02-08 Godkänd Kurskod: TSRT7 Ansvarigs e-post: chros822@student.liu.se
Kravspecifikation. LIPs. LiTH Flygsimulator Erik Carlsson. Version 1.0. Status. TSRT71 Reglerteknisk projektkurs Kristin Fredman
 Kravspecifikation Erik Carlsson Version 1.0 Status Granskad namn Datum Godkänd Kristin Fredman Projektidentitet Vårterminen 2005 Linköpings tekniska högskola, Institutionen för systemteknik, ISY Namn Ansvar
Kravspecifikation Erik Carlsson Version 1.0 Status Granskad namn Datum Godkänd Kristin Fredman Projektidentitet Vårterminen 2005 Linköpings tekniska högskola, Institutionen för systemteknik, ISY Namn Ansvar
LiTH Utveckling och implementering av regulator för styrning av gimbalmonterade sensorer i UAV:er. Kravspecifikation.
 Utveckling och implementering av regulator för 2005-02- Kravspecifikation Version.0 Granskad Godkänd Status Utveckling och implementering av regulator för 2005-02- PROJEKTIDENTITET 2005/VT Linköpings tekniska
Utveckling och implementering av regulator för 2005-02- Kravspecifikation Version.0 Granskad Godkänd Status Utveckling och implementering av regulator för 2005-02- PROJEKTIDENTITET 2005/VT Linköpings tekniska
LiTH Autonom styrning av mobil robot 2007-03-26 Testplan Version 1.0 TSRT71-Reglertekniskt projektkurs Anders Lindgren L IPs
 Testplan Version 1.0 Status Granskad Godkänd TSRT71-Reglertekniskt projektkurs LIPs PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon
Testplan Version 1.0 Status Granskad Godkänd TSRT71-Reglertekniskt projektkurs LIPs PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon
Efterstudie. Redaktör: Jenny Palmberg Version 1.0. Status. LiTH Fordonssimulator. Granskad Godkänd. TSRT71 Jenny Palmberg
 Efterstudie Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET Grupp 1, 2006/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Simon Danielsson Kvalitetsansvarig
Efterstudie Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET Grupp 1, 2006/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Simon Danielsson Kvalitetsansvarig
Projektplan David Sandberg Version 1.0
 Projektplan David Sandberg Version 1.0 Status Granskad Godkänd Projektidentitet Grupp 2, 2010/HT Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-mail David Sandberg Projektledare 073-9504672 davsa746@student.liu.se
Projektplan David Sandberg Version 1.0 Status Granskad Godkänd Projektidentitet Grupp 2, 2010/HT Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-mail David Sandberg Projektledare 073-9504672 davsa746@student.liu.se
Systemskiss. Remotely Operated Underwater Vehicle. Version 1.0. Simon Lindblom. 22 september Status
 Systemskiss Remotely Operated Underwater Vehicle Version 1.0 Simon Lindblom 22 september 2014 Status Granskad SL, OW 2014-09-22 Godkänd Isak Nielsen 2014-09-22 Projektidentitet E-post: Hemsida: Beställare:
Systemskiss Remotely Operated Underwater Vehicle Version 1.0 Simon Lindblom 22 september 2014 Status Granskad SL, OW 2014-09-22 Godkänd Isak Nielsen 2014-09-22 Projektidentitet E-post: Hemsida: Beställare:
Rapportering som krävs utöver LIPS-dokumenten: poster föredrag där projektets genomförande och resultat beskrivs hemsida som beskriver projektet
 Sida 1 Projektnamn Utveckling och implementering av regulator för styrning av gimbalmonterade sensorer i UAV:er Beställare Jon Kronander (ISY - Reglerteknik) Projektledare Student Projektbeslut Morgan
Sida 1 Projektnamn Utveckling och implementering av regulator för styrning av gimbalmonterade sensorer i UAV:er Beställare Jon Kronander (ISY - Reglerteknik) Projektledare Student Projektbeslut Morgan
Projektplan. Flygande Autonomt Spaningsplan. Version 1.0. Dokumentansva Datum: 13 februari Dokumentansvarig: Henrik Abrahamsson.
 Flygande Autonomt Spaningsplan Version 1.0 Dokumentansvarig: Henrik Abrahamsson Dokumentansva Datum: 13 februari 2008 Status Granskad Godkänd Projektidentitet Hemsida: Kund: LiTH http://www.isy.liu.se/edu/projekt/tsrt71/2008/flygproj2008/
Flygande Autonomt Spaningsplan Version 1.0 Dokumentansvarig: Henrik Abrahamsson Dokumentansva Datum: 13 februari 2008 Status Granskad Godkänd Projektidentitet Hemsida: Kund: LiTH http://www.isy.liu.se/edu/projekt/tsrt71/2008/flygproj2008/
TSRT10 - Projektplan
 TSRT10 - Projektplan Turbogruppen Version 0.2 22 september 2016 Status Granskad Dennis Åberg Skender 22 september 2016 Godkänd Namn Datum i Turbogruppen Projektidentitet Name Ansvar Telefon E-post (@student.liu.se)
TSRT10 - Projektplan Turbogruppen Version 0.2 22 september 2016 Status Granskad Dennis Åberg Skender 22 september 2016 Godkänd Namn Datum i Turbogruppen Projektidentitet Name Ansvar Telefon E-post (@student.liu.se)
Testprotokoll. LiTH Segmentering av MR-bilder med ITK Anders Eklund Version 1.0. Status
 Segmentering av MR-bilder med ITK 2006-05-02 Testprotokoll Version 1.0 Status ranskad odkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 1 Segmentering av MR-bilder med ITK 2006-05-02 PROJEKTIDENTITET
Segmentering av MR-bilder med ITK 2006-05-02 Testprotokoll Version 1.0 Status ranskad odkänd Bilder och grafik projektkurs, CDIO MCIV LIPs 1 Segmentering av MR-bilder med ITK 2006-05-02 PROJEKTIDENTITET
Cargolog Impact Recorder System
 Cargolog Impact Recorder System MOBITRON Mobitron AB Box 241 561 23 Huskvarna, Sweden Tel +46 (0)36 512 25 Fax +46 (0)36 511 25 Att mäta är att veta Vi hjälper dig och dina kunder minska skador och underhållskostnader
Cargolog Impact Recorder System MOBITRON Mobitron AB Box 241 561 23 Huskvarna, Sweden Tel +46 (0)36 512 25 Fax +46 (0)36 511 25 Att mäta är att veta Vi hjälper dig och dina kunder minska skador och underhållskostnader
LIPs Martin Lindfors ChrKr Projdir2017_sbd.doc CKr
 Martin Lindfors 2017-08-22 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Minröjningssystem Martin Lindfors, ISY Student Torbjörn Crona och Martin Lindfors Läsperiod
Martin Lindfors 2017-08-22 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Minröjningssystem Martin Lindfors, ISY Student Torbjörn Crona och Martin Lindfors Läsperiod
Användarhandledning. Redaktör: Jenny Palmberg Version 1.0. Status. LiTH Fordonssimulator. Granskad Godkänd. TSRT71 Jenny Palmberg
 Användarhandledning Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET Grupp 1, 2006/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Simon Danielsson
Användarhandledning Redaktör: Version 1.0 Granskad Godkänd Status Sida 1 PROJEKTIDENTITET Grupp 1, 2006/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Simon Danielsson
Kravspecifikation. Flygande Autonomt Spaningsplan. Version 1.2. Dokumentansvarig: Henrik Abrahamsson Datum: 29 april Status.
 Flygande Autonomt Spaningsplan Version.2 Dokumentansvarig: Henrik Abrahamsson Datum: 29 april 2008 Status Granskad Godkänd Projektidentitet Hemsida: Kund: LiTH http://www.isy.liu.se/edu/projekt/tsrt7/2008/flygproj2008/
Flygande Autonomt Spaningsplan Version.2 Dokumentansvarig: Henrik Abrahamsson Datum: 29 april 2008 Status Granskad Godkänd Projektidentitet Hemsida: Kund: LiTH http://www.isy.liu.se/edu/projekt/tsrt7/2008/flygproj2008/
Projektdirektiv. Rikard Falkeborn Sida 1
 2007 12 03 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Självetablerande sensornätverk med GPS och 3G, ISY Student David Lindgren, Läsperiod 3 4, vårterminen 2008.
2007 12 03 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Självetablerande sensornätverk med GPS och 3G, ISY Student David Lindgren, Läsperiod 3 4, vårterminen 2008.
Systemskiss Optimal Styrning av Autonom Racerbil
 No Oscillations Corporation Systemskiss Optimal Styrning av Autonom Racerbil Version 1.0 Författare: Mikael Rosell Datum: 29 november 2013 Status Granskad Projektgruppen 2013-09-18 Godkänd Projektidentitet
No Oscillations Corporation Systemskiss Optimal Styrning av Autonom Racerbil Version 1.0 Författare: Mikael Rosell Datum: 29 november 2013 Status Granskad Projektgruppen 2013-09-18 Godkänd Projektidentitet
TSRT09 Reglerteori. Sammanfattning av Föreläsning 3. Sammanfattning av Föreläsning 3, forts. Sammanfattning av Föreläsning 3, forts.
 Reglerteori 2016, Föreläsning 4 Daniel Axehill 1 / 18 Sammanfattning av Föreläsning 3 Kovariansfunktion: TSRT09 Reglerteori Föreläsning 4: Kalmanfiltret & det slutna systemet Daniel Axehill Reglerteknik,
Reglerteori 2016, Föreläsning 4 Daniel Axehill 1 / 18 Sammanfattning av Föreläsning 3 Kovariansfunktion: TSRT09 Reglerteori Föreläsning 4: Kalmanfiltret & det slutna systemet Daniel Axehill Reglerteknik,
Projektplan. LIPs. Per Henriksson Version 1.0. LiTH 7 december Optimering av hjullastare. TSRT10 projektplan.pdf WHOPS 1
 Projektplan Per Henriksson Version 1.0 1 Status Granskad JT, PD, JR Godkänd - 2 Projektidentitet Optimering av Hjullastare HT2011 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-post Per Henriksson
Projektplan Per Henriksson Version 1.0 1 Status Granskad JT, PD, JR Godkänd - 2 Projektidentitet Optimering av Hjullastare HT2011 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-post Per Henriksson
Robotgräsklippare 2014-01-22 PROJEKTPLAN. Robotgräsklippare. Version 1.1. Status. Granskad. Godkänd. Robotgräsklippare.
 2014-01-22 PROJEKTPLAN Version 1.1 Granskad Status Godkänd LIPS Projektplan i 2014-01-22 PROJEKTIDENTITET 2014/2015 Njudungsgymnasiet T4 Namn Ansvar Telefon E-post Isak Linehag Dokumentansvarig 070-332
2014-01-22 PROJEKTPLAN Version 1.1 Granskad Status Godkänd LIPS Projektplan i 2014-01-22 PROJEKTIDENTITET 2014/2015 Njudungsgymnasiet T4 Namn Ansvar Telefon E-post Isak Linehag Dokumentansvarig 070-332
LiTH Flygsimulator Testprotokoll Version 1.0 TSRT71 Reglerteknisk projektkurs L IPs Kristin Fredman
 Version 1.0 Status Granskad Godkänd Kristin Fredman Projektidentitet Vårterminen 2005 Linköpings tekniska högskola, Institutionen för systemteknik, ISY Namn Ansvar Telefon E-post testansvarig (TST) 0706-81
Version 1.0 Status Granskad Godkänd Kristin Fredman Projektidentitet Vårterminen 2005 Linköpings tekniska högskola, Institutionen för systemteknik, ISY Namn Ansvar Telefon E-post testansvarig (TST) 0706-81
Kravspecifikation Autonom Bandvagn
 Kravspecifikation Autonom Bandvagn Version.0 Redaktör: Jon Bjärkefur Datum: 8 september 2009 Status Granskad Karl Granström 2009-09-4 Godkänd Jonas Callmer 2009-09-8 Kurskod: TSRT0 Redaktörens E-mail:
Kravspecifikation Autonom Bandvagn Version.0 Redaktör: Jon Bjärkefur Datum: 8 september 2009 Status Granskad Karl Granström 2009-09-4 Godkänd Jonas Callmer 2009-09-8 Kurskod: TSRT0 Redaktörens E-mail:
Kravspecifikation21.pdf. Diagnos av elkraftsystem
 Kravspecifikation Diagnos av elkraftsystem i satellit Version 3.0 Ansvarig utgivare: Karin Ohlsson-O hman Datum: 29 november 200 Status Granskad Godka nd Kursnamn: Projektgrupp: Kurskod: Projekt: EF EF
Kravspecifikation Diagnos av elkraftsystem i satellit Version 3.0 Ansvarig utgivare: Karin Ohlsson-O hman Datum: 29 november 200 Status Granskad Godka nd Kursnamn: Projektgrupp: Kurskod: Projekt: EF EF
Projektplan Autonom Bandvagn
 Projektplan Autonom Bandvagn Version 1. Redaktör: Erik Hagfalk Datum: 18 september 29 Status Granskad Jonas Callmer 29-9-17 Godkänd Jonas Callmer 29-9-18 Projektidentitet E-mail: Hemsida: Beställare: Kund:
Projektplan Autonom Bandvagn Version 1. Redaktör: Erik Hagfalk Datum: 18 september 29 Status Granskad Jonas Callmer 29-9-17 Godkänd Jonas Callmer 29-9-18 Projektidentitet E-mail: Hemsida: Beställare: Kund:
Kravspecifikation. Oskar Törnqvist Version 1.0. Status. Granskad. Godkänd
 Kravspecifikation Version.0 Status Granskad Godkänd Autonom styrning av mobil robot 2007-02-5 PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar
Kravspecifikation Version.0 Status Granskad Godkänd Autonom styrning av mobil robot 2007-02-5 PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar
Projektplan. LiTH Kamerabaserat Positioneringssystem för Hamnkranar Mikael Ögren Version 1.0. Status
 Mikael Ögren Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET 09/HT, CaPS Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mohsen Alami designansvarig mekanik 073-7704709 mohal385@student.liu.se
Mikael Ögren Version 1.0 Status Granskad Godkänd 1 PROJEKTIDENTITET 09/HT, CaPS Linköpings tekniska högskola, ISY Namn Ansvar Telefon E-post Mohsen Alami designansvarig mekanik 073-7704709 mohal385@student.liu.se
Reglerteknik. Lars Eriksson Johan Löfberg - presentatör. Fordonssystem Institutionen för Systemteknik Linköpings Universitet
 Reglerteknik Masterprofil på M Lars Eriksson Johan Löfberg - presentatör Fordonssystem Institutionen för Systemteknik Linköpings Universitet 2014-03-24 Lars Eriksson (larer@isy.liu.se) Reglerteknik 2014-03-24
Reglerteknik Masterprofil på M Lars Eriksson Johan Löfberg - presentatör Fordonssystem Institutionen för Systemteknik Linköpings Universitet 2014-03-24 Lars Eriksson (larer@isy.liu.se) Reglerteknik 2014-03-24
Reglerteori, TSRT09. Föreläsning 4: Kalmanfiltret & det slutna systemet. Torkel Glad. Reglerteknik, ISY, Linköpings Universitet
 Reglerteori, TSRT09 Föreläsning 4: Kalmanfiltret & det slutna systemet Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 3 2(19) Kovariansfunktion: Spektrum: R u (τ) = Eu(t)u(t τ)
Reglerteori, TSRT09 Föreläsning 4: Kalmanfiltret & det slutna systemet Reglerteknik, ISY, Linköpings Universitet Sammanfattning av Föreläsning 3 2(19) Kovariansfunktion: Spektrum: R u (τ) = Eu(t)u(t τ)
Erik Hellström. Status. Granskad. Godkänd
 3URMHNWSODQ Erik Hellström 9HUVLRQ Status Granskad Godkänd PROJEKTIDENTITET Vt 2004 Linköpings Tekniska Högskola, ISY Gruppdeltagare 1DPQ $QVYDU 7HOHIRQ (SRVW Erik Hellström Projektledare 013-10 61 64
3URMHNWSODQ Erik Hellström 9HUVLRQ Status Granskad Godkänd PROJEKTIDENTITET Vt 2004 Linköpings Tekniska Högskola, ISY Gruppdeltagare 1DPQ $QVYDU 7HOHIRQ (SRVW Erik Hellström Projektledare 013-10 61 64
TURBO Systemskiss. 5 december Status. Granskad SL
 TURBO Systemskiss 5 december 2009 Status Granskad 2009-09-21 SL Godkänd Projektidentitet Beställare: Lars Eriksson, Linköping University Telefon: +46 13 284409, E-post: larer@isy.liu.se Köpare: Per Andersson
TURBO Systemskiss 5 december 2009 Status Granskad 2009-09-21 SL Godkänd Projektidentitet Beställare: Lars Eriksson, Linköping University Telefon: +46 13 284409, E-post: larer@isy.liu.se Köpare: Per Andersson
Systemskiss. Vidareutveckling Optimal Styrning av Radiostyrd Racerbil. Version 1.0 Simon Eiderbrant. Granskad Erik Olsson 20 September 2012
 Systemskiss Vidareutveckling Optimal Styrning av Radiostyrd Racerbil Version 1.0 Simon Eiderbrant Status Granskad Erik Olsson 20 September 2012 Godkänd Projektidentitet Grupp-e-post: Hemsida: Beställare:
Systemskiss Vidareutveckling Optimal Styrning av Radiostyrd Racerbil Version 1.0 Simon Eiderbrant Status Granskad Erik Olsson 20 September 2012 Godkänd Projektidentitet Grupp-e-post: Hemsida: Beställare:
LIPs Andreas Bergström ChrKr Projektdirektiv16_Toyota_v2.0.doc CKr
 Andreas Bergström 2016-09-08 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Planering och Sensorfusion för Autonom Truck Andreas Bergström, ISY Student Emil Selse och
Andreas Bergström 2016-09-08 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Planering och Sensorfusion för Autonom Truck Andreas Bergström, ISY Student Emil Selse och
Testplan. Status. David Sandberg, Tobias Lundqvist, Rasmus Dewoon, Marcus Wirebrand Version 1.2. Granskad Godkänd
 Testplan David Sandberg, Tobias Lundqvist, Rasmus Dewoon, Marcus Wirebrand Version 1.2 Status Granskad Godkänd Projektidentitet Grupp 2, 2010/HT Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-mail
Testplan David Sandberg, Tobias Lundqvist, Rasmus Dewoon, Marcus Wirebrand Version 1.2 Status Granskad Godkänd Projektidentitet Grupp 2, 2010/HT Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon E-mail
Projektdirektiv Hanna Nyqvist Sida 1
 2014-08-27 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Minröjningsbandvagn, ISY Student Torbjörn Crona, Läsperiod 1-2, HT 2014. Projektet klart senast vid projektkonferensen.
2014-08-27 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Minröjningsbandvagn, ISY Student Torbjörn Crona, Läsperiod 1-2, HT 2014. Projektet klart senast vid projektkonferensen.
LiTH Autonom bandvagn med stereokamera 2010-11-22. Användarhandledning. Gustav Hanning Version 0.1. Status. Granskad. Godkänd.
 Användarhandledning Gustav Hanning Version 0.1 Granskad Godkänd Status 1 PROJEKTIDENTITET 2010/HT, 8Yare Linköpings tekniska högskola, institutionen för systemteknik (ISY) Namn Ansvar Telefon E-post Henrik
Användarhandledning Gustav Hanning Version 0.1 Granskad Godkänd Status 1 PROJEKTIDENTITET 2010/HT, 8Yare Linköpings tekniska högskola, institutionen för systemteknik (ISY) Namn Ansvar Telefon E-post Henrik
Processidentifiering och Polplacerad Reglering
 UmU/TFE Laboration Processidentifiering och Polplacerad Reglering Introduktion Referenser till teoriavsnitt följer här. Processidentifiering: Kursbok kap 17.3-17.4. Jämför med det sista exemplet i kap
UmU/TFE Laboration Processidentifiering och Polplacerad Reglering Introduktion Referenser till teoriavsnitt följer här. Processidentifiering: Kursbok kap 17.3-17.4. Jämför med det sista exemplet i kap
No Oscillations Corporation. Efterstudie. Optimal Styrning av Autonom Racerbil. Version 0.1 Författare: Sofia Johnsen Datum: 20 december 2013
 No Oscillations Corporation Efterstudie Optimal Styrning av Autonom Racerbil Version 0.1 Författare: Sofia Johnsen Datum: 20 december 2013 Status Granskad Sofia Johnsen 2013-12-12 Godkänd Projektidentitet
No Oscillations Corporation Efterstudie Optimal Styrning av Autonom Racerbil Version 0.1 Författare: Sofia Johnsen Datum: 20 december 2013 Status Granskad Sofia Johnsen 2013-12-12 Godkänd Projektidentitet
Systemskiss Autonom målföljning med quadcopter
 Version 1.1 Robo Ptarmigan 30 november 2015 Status Granskad GN, KL 2015-09-25 Godkänd Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare: Handledare: karlo343@student.liu.se
Version 1.1 Robo Ptarmigan 30 november 2015 Status Granskad GN, KL 2015-09-25 Godkänd Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare: Handledare: karlo343@student.liu.se
Projektplan. Per-Emil Eliasson, Claes Fälth, Manne Gustafson, Andreas Gustafsson. 29 januari 2003
 Per-Emil Eliasson, Claes Fälth, Manne Gustafson, Andreas Gustafsson 29 januari 2003 Innehåll 1 Inledning 2 2 Vad ska göras? 2 2.1 Steg I brainstorming....................... 2 2.2 Steg II designförslag........................
Per-Emil Eliasson, Claes Fälth, Manne Gustafson, Andreas Gustafsson 29 januari 2003 Innehåll 1 Inledning 2 2 Vad ska göras? 2 2.1 Steg I brainstorming....................... 2 2.2 Steg II designförslag........................
Systemskiss Racetrack 2015
 Systemskiss Racetrack 2015 Version 1.0 Författare: Jonathan Stenström Datum: 17 november 2015 Status Granskad JS, LK, IK 2015-09-20 Godkänd Projektidentitet Grupp E-mail: Hemsida: Beställare: Kund: Examinator:
Systemskiss Racetrack 2015 Version 1.0 Författare: Jonathan Stenström Datum: 17 november 2015 Status Granskad JS, LK, IK 2015-09-20 Godkänd Projektidentitet Grupp E-mail: Hemsida: Beställare: Kund: Examinator:
Projektplan Autonomstyrning av gaffeltruck
 Version 1.0 L.A.M.A 12 oktober 2016 Status Granskad Samtliga projektmedlemmar 2016-09-21 Godkänd Andreas Bergström 2016-09-23 Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare:
Version 1.0 L.A.M.A 12 oktober 2016 Status Granskad Samtliga projektmedlemmar 2016-09-21 Godkänd Andreas Bergström 2016-09-23 Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare:
Kravspecifikation Autonom målföljning med quadcopter
 Version.2 Robo Ptarmigan 30 november 205 Status Granskad KL, CC 205--8 Godkänd Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare: Handledare: karlo343@student.liu.se http://www.isy.liu.se/edu/projekt/tsrt0/205/quadcopter/
Version.2 Robo Ptarmigan 30 november 205 Status Granskad KL, CC 205--8 Godkänd Projektidentitet Gruppmail: Hemsida: Beställare: Kund: Kursansvarig: Projektledare: Handledare: karlo343@student.liu.se http://www.isy.liu.se/edu/projekt/tsrt0/205/quadcopter/
LiTH Mobile Scout. Kravspecifikation. Redaktör: Patrik Molin Version 1.0. Status. Granskad Godkänd. TSRT71 Patrik Molin.
 2009-02-3 Kravspecifikation Redaktör: Version.0 Granskad Godkänd Status TSRT7 Sida 2009-02-3 PROJEKTIDENTITET 2009/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Martin
2009-02-3 Kravspecifikation Redaktör: Version.0 Granskad Godkänd Status TSRT7 Sida 2009-02-3 PROJEKTIDENTITET 2009/VT, Linköpings Tekniska Högskola, ISY Gruppdeltagare Namn Ansvar Telefon E-post Martin
Detektion och felisolering i förbränningsmotorer PROJEKTPLAN. Max Karjalainen. Version 1.0. Status
 PROJEKTPLAN Max Karjalainen Version 1.0 Status Granskad MaK 2015-09-22 Godkänd Reglerteknisk projektkurs LIPS Projektplan i bohli890@student.liu.se Reglerteknisk projektkurs LIPS Projektplan ii bohli890@student.liu.se
PROJEKTPLAN Max Karjalainen Version 1.0 Status Granskad MaK 2015-09-22 Godkänd Reglerteknisk projektkurs LIPS Projektplan i bohli890@student.liu.se Reglerteknisk projektkurs LIPS Projektplan ii bohli890@student.liu.se
Uppdrag för LEGO projektet Hitta en vattensamling på Mars
 LEGO projekt Projektets mål är att ni gruppvis skall öva på att genomföra ett projekt. Vi använder programmet LabVIEW för att ni redan nu skall bli bekant med dess grunder till hjälp i kommande kurser.
LEGO projekt Projektets mål är att ni gruppvis skall öva på att genomföra ett projekt. Vi använder programmet LabVIEW för att ni redan nu skall bli bekant med dess grunder till hjälp i kommande kurser.
Kravspecifikation. LiTH. Autopositioneringssystem för utlagda undervattenssensorer Erik Andersson Version 1.3. Status
 Autopositioneringssystem för utlagda undervattenssensorer 2007-04-7 LiTH Kravspecifikation Erik Andersson Version. Status Granskad Godkänd TSRT7 Reglerteknisk projektkurs kravspec.pdf Autopositioneringssystem
Autopositioneringssystem för utlagda undervattenssensorer 2007-04-7 LiTH Kravspecifikation Erik Andersson Version. Status Granskad Godkänd TSRT7 Reglerteknisk projektkurs kravspec.pdf Autopositioneringssystem
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER, TER 2, TER E TID: 4 mars 208, klockan 8-3 KURS: TSRT2, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
TENTAMEN I REGLERTEKNIK Y/D SAL: TER, TER 2, TER E TID: 4 mars 208, klockan 8-3 KURS: TSRT2, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD):
Systemskiss. Flygande Autonomt Spaningsplan. Version 1.0. Dokumentansva Datum: 13 februari Dokumentansvarig: Henrik Abrahamsson.
 Flygande Autonomt Spaningsplan Version 1.0 Dokumentansvarig: Henrik Abrahamsson Dokumentansva Datum: 13 februari 2008 Status Granskad Godkänd Projektidentitet Hemsida: Kund: http://www.isy.liu.se/edu/projekt/tsrt71/2008/flygproj2008/
Flygande Autonomt Spaningsplan Version 1.0 Dokumentansvarig: Henrik Abrahamsson Dokumentansva Datum: 13 februari 2008 Status Granskad Godkänd Projektidentitet Hemsida: Kund: http://www.isy.liu.se/edu/projekt/tsrt71/2008/flygproj2008/
Beskrivning av hur du ansluter en E-terminal från Beijer Electronics till HC900 via Ethernet så att denna kan visa och manipulera data i HC900.
 Noterat i labbet om: Anslut en Beijer Electronics E-terminal till HC900 via Ethernet NIL00019 2002/09/03 Vad är Noterat i labbet om? Noterat i labbet om är en samling dokument som skall ses som hjälpmedel
Noterat i labbet om: Anslut en Beijer Electronics E-terminal till HC900 via Ethernet NIL00019 2002/09/03 Vad är Noterat i labbet om? Noterat i labbet om är en samling dokument som skall ses som hjälpmedel
Efterstudie. LIPs. LiTH Autonom styrning av mobil robot Martin Elfstadius. Version 1.0. Status. TSRT71-Reglertekniskt projektkurs
 Efterstudie Version 1.0 Status Granskad Godkänd TSRT71-Reglertekniskt projektkurs LIPs PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon
Efterstudie Version 1.0 Status Granskad Godkänd TSRT71-Reglertekniskt projektkurs LIPs PROJEKTIDENTITET Autonom styrning av mobil robot Vårterminen 2007 Linköpings Tekniska Högskola, ISY Namn Ansvar Telefon
Före Kravspecifikationen
 projektidé BP0 förstudie BP1 förberedelse BP2 Kravspecifikationen Beskriver VAD som ska utföras i projektet? projektdirektiv beslutspunkter specifikationer planer kunddokument rapporter protokoll M beställarens
projektidé BP0 förstudie BP1 förberedelse BP2 Kravspecifikationen Beskriver VAD som ska utföras i projektet? projektdirektiv beslutspunkter specifikationer planer kunddokument rapporter protokoll M beställarens