EXAMENSARBETE. Användning av maskinstyrning och avprickningsplan. Lisette Tillberg Högskoleexamen Bygg och anläggning
|
|
|
- Viktoria Arvidsson
- för 6 år sedan
- Visningar:
Transkript
1 EXAMENSARBETE Användning av maskinstyrning och avprickningsplan 2013 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser
2
3 Förord I utbildningen Bygg och anläggning med inriktning till mättekniker ingår det att skriva ett examensarbete på 7,5 högskolepoäng som jag har utfört under sommaren/hösten Sommaren 2013 jobbade jag i Kiruna för Peab. Under denna period var jag ombedd att göra en avprickningsplan över dammhöjningen på LKAB och valde då att göra det som en del i mitt examensarbete. Sedan hade vi även kontinuerlig kontroll av maskinstyrningen som jag sammansatte statistik på. Jag vill tacka alla medarbetare på dammen, Protractor och John Backman på Peab som har varit till stor hjälp under tiden jag har skrivit examensarbetet. Luleå, oktober 2013 i
4 Sammanfattning Jag utförde mitt examensarbete hos Peab på projektet Kiruna dammhöjning Peab hade entreprenaden på beställning av LKAB. Examensarbetet utgörs av flera delar. Dels fakta om maskinstyrning, avprickningsplan och statistik över maskinkontroll. Maskinstyrningen kontrollerades kontinuerligt i höjd och position. Jag studerade hur stora avvikelserna har varit på noggrannheten. Resultat visar att det är stora skillnader beroende på maskiner och områden de har arbetat på. Under en tre månaders period arbetade vi efter en avprickninsplan som hjälpte till att åskådliggöra projektets olika delar. Den är bra vid byggmöten för att på ett enkelt sätt visa om till exempel tidsplanen håller. ii
5 Innehållsförteckning Förord... i Sammanfattning... ii Innehållsförteckning Inledning Bakgrund Syfte Frågeställning Avgränsningar Metod Maskinstyrning Allmänt om maskinstyrning Maskinstyrning på 3D Avprickningsplan Allmänt om avprickningsplan Avprickningsplan för dammhöjning Maskinkontroll Statistik Kontrollmätning av Hitachi Diskussion och slutsats Referenser Bilagor Kontrollmätning av Hitachi Damm området Avprickningsplan från start Avprickningsplan Maskinkontroll Diagram över maskinkontroll
6 1. Inledning 1.1 Bakgrund Examensarbetet skriver jag på beställning av Peab i Kiruna som för tillfället har en entreprenad (Kiruna dammhöjning 2013) på beställning av LKAB. Mitt arbete är dels att göra en avprickningsplan och följa upp den under tre månader på projektet men även att föra statistik över maskinstyrningskontrolleringarna. Peab är ett bygg och anläggningsföretag som startades på 1950-talet. Deras grundläggande värderingar är jordnära, utvecklande, personliga och pålitliga. LKAB är ett av Sveriges äldsta industriföretag. I Kiruna driver LKAB en underjordsgruva var man har påbörjat dammhöjning av en befintlig damm inne på deras område. 1.2 Syfte Syftet med rapporten kan man se ur flera perspektiv. Jag får en insyn i hur noggrannheten i maskinstyrningen kan variera. Jag lär mig att göra en avprickningsplan och se möjligheterna/fördelarna med att arbeta med den under ett projekt. 1.3 Frågeställning Hur kan en avprickningsplan se ut Hur används en avprickningsplan Hur stora skillnader är det på maskinstyrningarnas position 1.4 Avgränsningar Jag är begränsad tidsmässigt dels för att examensarbetet är på 7,5 högskolepoäng men även för att min tid på projektet är tidsbestämt. 2
-, tre dimensionellt (3D)- och det nyaste är fyrdimensionellt (4D)-system.")
7 2. Metod Jag har studerat tidigare avprickningsplaner, läst handlingar för projektet och studerat litteratur om maskinstyrning. Kontrollerat maskinernas positioner (x,y,z) som kört på maskinstyrning. 3. Maskinstyrning 3.1 Allmänt om maskinstyrning Maskinstyrning finns i tre olika varianter tvådimensionellt (2D)-, tre dimensionellt (3D)- och det nyaste är fyrdimensionellt (4D)-system. Maskinstyrning används både som ett hjälpmedel men även som ett automatiskt styrmedel på vissa maskiner. De olika varianterna skiljer sig åt på några punkter. 2D-systemet är ett visuellt hjälpmedel som kan visa tvärfall och höjd på maskinerna. 3D-systemet kan även visa vilken position maskinen har i plan, man använder sig av en modell. 4D-systemet har utvecklats ännu mer och här har man även tiden som en parameter. Några maskiner som kan köra på maskinstyrning är grävmaskin, bandtraktor, hjullastare och asfaltsläggare. 3.2 Maskinstyrning på 3D Maskinstyrning på 3D består av kontrollbox, styrdator, sensorer och positionsangivare. I vissa system är kontrollboxen och styrdatorn ihop i ett. För att kunna positionera maskinen i plan krävs det positionsangivare som ultraljud, Global Navigation Satellite System (GNSS) eller totalstation. Dock kan maskiner som kör på Topcon systemet även använda sig av Millimeter GPS (MMGPS) för att få position i plan. Grävmaskinen har sensorer som sitter monterade på kropp, bom, sticka och skopa. Använder man sig av en rotortilt har man ännu en sensor för den delen. Sensorernas uppgift är att kontrollera maskinens rörelser, som lutning och vridning. Dessa är ihopkopplade till 3


8 kontrollboxen genom kabel. På grävmaskinen sitter antennerna för GNSS baktill uppe på maskinen. I hytten rakt framför föraren sitter kontrollboxen och 3D-styrdatorn. Antennerna tar emot signaler som skickas till 3D-styrdatorn för att kunna positionera maskinen i plan och höjd. Styrdatorn kan sedan med hjälp av sensorerna och kontrollboxen positionera skopan tredimensionellt. I styrdatorn lagrar man tredimensionella terrängmodeller på arbetet som skall utföras. Maskinföraren kan sedan på styrdatorn se hur han ligger till i förhållande till modellen. Antenner Kontrollbox och styrdator 4

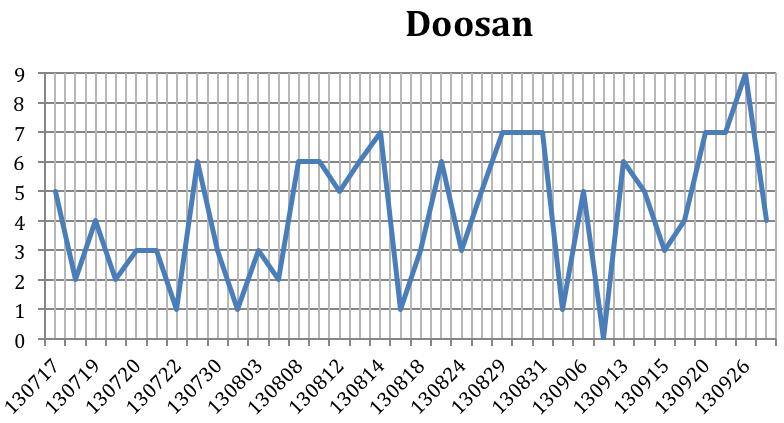
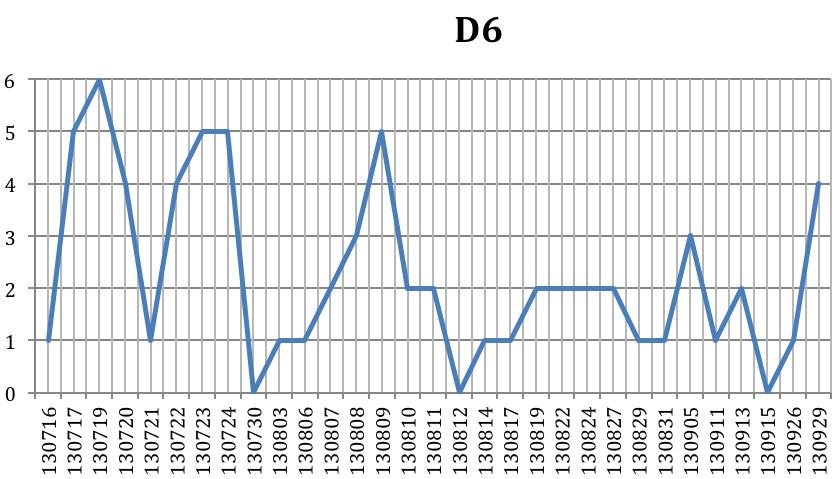
9 Sensorer 4. Avprickningsplan 4.1 Allmänt om avprickningsplan På Peab har man börjat jobba med så kallade avprickningsplaner för projekten. Detta är för att på ett enklare sätt veta vad som är färdigt och vad som är kvar att göras på varje projekt. På ett tydligt sätt får man även en överblick på alla lager, brunnar, sättningspeglar med mer som skall vara på varje sektion. Avprickningsplanen används många gånger under byggmöten för att till exempel visa hur man ligger till tidsmässigt. 4.2 Avprickningsplan för dammhöjning Jag valde att göra avprickningsplanen för var 100:e meter då dammen är ett stort område och mindre sträckor skulle bli för detaljerade. Vi arbetade med den på så sätt att när man hade påbörjat ett lager drog man ett streck, när den sedan var inmätt och korrekt höjd drog man till ett kryss. 5. Maskinkontroll 5.1 Statistik Varannan dag kontrollerade vi maskinernas position och höjd för att undvika att det blev fel i lager och liknande. Vi skrev endast upp avvikelserna i höjd, dock tittade vi även på avvikelser i X och Y led. Då området är väldigt stort och omkringliggande mark varierade hade vi lite olika sätt att kontrollera skoporna på. Om möjlighet fanns använde vi oss av en sten i första hand men andra alternativ var att göra ett kryss som man mätte in och senare la skopan på eller ta kort på skärmen i maskinen för att sedan själv mäta på samma punkt. Vid större avvikelser kontrollerade vi även arbetet maskinen utförde för att minimera fel. 5
10 5.2 Kontrollmätning av Hitachi 280 Den 15 september klockan 18:00 utförde jag en noggrannare kontroll på en grävmaskin för att se hur exakt den var. Började med att spraya ut tre kryss på tre olika punkter runt om grävmaskinen då det inte fanns några stenar att tillgå. Efter det mätte jag in alla punkterna med gps:en och skrev upp positionen. Sedan mätte jag samma punkter med skopans mitt i krysset. Här skiljde det sig lite mer i x och y led då det är svårt att få exakt skopans mitt på exakt samma punkt som är inmätt. För att veta att kalibreringen av skopan är rätt gjord skall punkterna visa samma differens, det vill säga att är det 2 cm differens i höjd på första punkten skall det vara det på de andra också. Vid detta tillfälle var grävmaskinen inställd på att visa millimeter, vilket är helt onödigt då både maskinstyrningen men även gpsnoggrannheten är sämre. Detta gjorde att differenserna mellan punkterna var olika men efter avrundning till centimeter hade alla punkterna exakt samma höjd som det inmätta med gps. Toleransen vid denna variant av kontrollmätning är i plan +/- 10 cm och i höjd +/- 30 mm. 6
11 6. Diskussion och slutsats Efter att jag har jobbat med avprickningsplanen i några månader anser jag att det är ett bra verktyg att använda sig av för att få en bättre överblick på projektet och för att se om till exempel tidsplan håller. De andra avprickningsplanerna jag studerade var uppbyggda på så sätt att var 20:e meter var utritad istället för var 100:e som jag gjorde. Har man större ytor anser jag att det lätt kan bli grötigt vid så täta sektioner, om man bara vill ha en enkel översikt. Är man däremot van att arbeta med en avprickningsplan så bör man göra den mer detaljerad. Hade även kunnat göra den mer specificerad på så sätt att man lägger in vilken storlek på rör, typ av brunnar och så vidare man hade på varje sektion. Däremot anser jag att folk som inte har jobbat med den har svårt att se fördelarna med avprickningsplanen och är lite skeptiska till den. Detta gjorde att ansvaret för att fylla i den inte prioriterades för alla och resulterade i att det i slutändan var jag själv som skötte detta på mina arbetsveckor. Jag själv kommer ta med mig detta sätt att jobba med avprickningsplan på nya projekt för att få en bra struktur och planering på det arbete som skall utföras. Maskinstyrningen under den delen av projektet som jag var där har haft lite brister till och från som jag anser hade kunnat undvikas med hjälp av en ansvarig mättekniker över maskinerna från modeller till kalibrering. När till exempel en maskin har haft problem med mottagning, kalibrering eller något liknande har man anlitat konsultfirmor som Picab och Scanlaser. Detta hade ibland kunnat undvikas då problemet inte alla gånger suttit i hydrauliken. De maskinerna vi hade störst problem med var bandtraktorerna. Detta är inget ovanligt då dessa maskiner jobbar på ett sådant sätt att maskinstyrningen tar mycket stryk av vibrationerna. Detta har man försökt undvika med till exempel mer fjädring på stången upp till GNSS-antennen. Konsekvenserna av vibrationerna blir att mottagningen försämras och man märkte tydlig skillnad på dessa om satelliterna var i sämre läge eller när de var på vissa områden av dammen vars det var lite radioskugga. Här var inte skillnaderna i x,y,z så stora men däremot var det många gånger man fick vänta på att mottagningen skulle komma för att den slog fram och tillbaka även när maskinen stod stilla. Statistiken över maskinstyrningen visar att de största höjddifferenserna är när maskinerna har varit mellan B-R och R-O dammdelarna. I och med att dessa partier var längre bort från basstationen och vid dammtån var mottagningen sämre. Detta gjorde att vi fick använda oss av både antenn och brygga för att sända ut, förlänga och förstärka signalen. På projektet hade vi maskiner med både Scanlaser system och Topcon system. Här kunde man se att maskinen med Topcon system hade bättre precision i kontrollerna och stördes inte lika lätt av radio eller liknande. Basstationen var Topcon och scripten sändes ut i CMR, på andra projekt har det dock visat sig att det har fungerat bättre på Scanlaser systemen att sända ut i RTCMv3 format. Maskinstyrning 7
12 7. Referenser Personliga John Backman Peab Anläggning AB Mätchef AO Norden Erik Beryk Mätingenjör Protractor Tjeckien Föreläsningar i gps och maskinstyrning Y0005B Hemsida 8
13 8. Bilagor 8.1 Kontrollmätning av Hitachi 280 Gps Maskin Differans Punkt 1 Punkt 1 N N E E H H Punkt 2 Punkt 2 N N E E H H Punkt 3 Punkt 3 N N E E ,094 H H

14 8.2 Damm området Basstation 10
15 Avprickningsplan från start B-C2 C2-C C-O2 O-O2 R-O B-R Ledningar Loussajärvi Läckagedike O-R Avprickningsplan dammhöjning Kabeldike Damm Teckenförklaring Bef Sättningspeglar Schakt/avtäckning Ny Anrikningssand Fint övergångslager 1 & 2 Finfilter Dränage ledning Fiberoptisk temperaturkabel Grovfilter 1 & 2 Stödfyllning Övergångslager Tåsten Kabelskydd Bärlager Dike Brunn 11

16 8.4 Avprickningsplan
17 8.5 Maskinkontroll DATUM MASKIN SEKTION VILLKOR SIGNATUR HÖJD DIFF Cat 345 C2-B OK PV Cat 385 C2-B OK! PV 10 cm D6 C2-B OK PV D8 C2-B OK PV Hitachi 280 B-R OK PV Volvo 290 B-R OK PV Volvo 380 B-R OK VV Cat 345 C2-B OK VV D8 C2-B OK VV Hitachi 280 C2-C X PV Swepos Hitachi 280 C2-C OK VV Cat 345 C2-C OK VV D8 C2-B OK VV Volvo 380 R-O OK VV Hitachi 280 C2-C OK VV D6 C2-C OK VV D8 C2-C OK VV D6 C2-B OK PV Cat 345 C2-B OK PV 13
18 D8 C2-C OK! PV 10 cm Volvo 380 R-O OK PV Hitachi 280 B-R X PV Hitachi 280 B-R X PV Swepos Volvo 380 R-O OK PV D8 C2-B OK PV D6 C2-C OK PV Volvo 380 R-O OK PV Cat 345 C2-C OK PV D8 C2-B OK PV D8 C2-C OK LT Hitachi 280 B-R OK LT Volvo 380 R-O OK LT Cat 345 C2-C OK LT 5 mm D8 C2-C OK LT 1 cm D6 C2-C OK LT 5 cm Volvo 380 R-O OK LT 8 mm Cat 345 C2-C OK LT 2 cm D8 C2-C OK LT 3 cm D6 C2-C OK LT 5 cm Volvo 380 O-R OK LT 2 cm D6 O2 OK LT 6 cm Cat 345 O2 OK LT 6 cm D8 C2-C OK LT 2 mm 14
19 Volvo 290 C2-B OK PV 2 cm D8 C2-B OK LT 4 cm Hitachi 280 B-R OK PV 3 cm D6 O2 OK LT 4 cm D6 O2 OK LT 6 cm D8 C2-C OK PV 1 cm Volvo 290 C2-C OK PV 5 cm Hitachi 280 B-R OK LT 6 cm Cat 345 C2-C OK LT 1 cm Volvo 380 O-R OK LT 4 cm D6 O2-O OK PV 5 cm D8 C2-B OK LT 2 cm Cat 345 C2-C OK LT 5 cm Volvo 380 R-O OK PV 4 cm Hitachi B-R OK! LT 7 cm Hitachi B-R OK! LT 7 cm Volvo 290 Loussa ledning OK LT 2 mm Volvo 380 R-O OK PV 3 cm D8 C2-B OK PV 4 cm Cat 345 C2-C OK PV 5 cm Doosan B-R OK LT 1 cm Hitachi 280 B-R OK LT 5 cm D6 C2-C OK LT 1 cm 15
20 Volvo 290 Loussa ledning OK LT D6 C2-C OK PV 5 cm Cat 385 O2-O OK PV 3 cm Hitachi 280 B-R OK LT 2 cm Doosan B-R OK LT 5 cm Cat 345 O2-O OK LT 2 cm Volvo 290 B-R OK LT 2 cm Hitachi 280 B-R OK LT 5 cm Doosan B-R OK LT 2 cm Volvo 380 R-O OK PV 1 cm Volvo 290 B-R OK LT 5 mm Doosan B-R OK LT 4 cm D6 C2-C OK LT 6 cm Hitachi 280 B-R OK LT 5 cm D8 O2-O OK PV 4 cm Volvo 380 R-O OK PV 2 cm Volvo 290 B-R OK LT 5 mm Hitachi 280 B-R OK LT 5 cm Doosan B-R OK LT 3 cm D6 C2-C OK LT 4 cm D8 O2-O OK LT 2 cm Cat 345 C2-C OK LT 2 cm Doosan B-R OK LT 3 cm 16
21 Hitachi 280 B-R OK LT 4 cm Volvo 290 B-R OK LT 1 cm D6 C2-C OK PV 1 cm Volvo 380 R-O OK PV 1 cm Cat 345 C2-C OK LT 2 cm Doosan B-R OK LT 1 cm Hitachi 280 B-R OK LT 1 cm D6 C2-C OK LT 4 cm Cat 345 C2-C OK LT 3 cm Doosan B-R OK VV 2.5 cm Hitachi 280 B-R OK VV 4 cm Volvo 290 B-R OK VV 5 mm D6 C2-C OK LT 5 cm Cat 345 C2-C OK VV 4 cm Doosan B-R OK VV 6 cm Hitachi 280 B-R OK VV 5 cm D6 C2-C OK PV 5 cm Cat 345 C2-B OK VV 5 cm Hitachi 280 B-R OK VV 5 cm Cat 345 C2-B OK VV 4 cm Hitachi 280 B-R OK VV 5 cm Cat 345 C2-B OK VV 6 mm Hitachi 280 B-R OK VV 5 cm Hitachi 280 B-R OK VV 6 cm 17
22 Hitachi 280 B-R OK VV 5 cm Doosan B-R OK LT 3 cm D8 C2-B OK LT 2 cm Cat 345 C2-B OK! EZ 8 cm D6 C2-C OK EZ Volvo 290 B-R OK LT 2 cm Volvo 290 C2-C OK PV 2 cm Doosan B-R OK LT 7 mm D8 C2-B OK LT 5 cm Cat 345 C2-B OK LT 3 mm Hitachi B-R OK LT 4 cm Hitachi 210 B-R OK LT 3 cm Doosan B-R OK EZ 3 cm Hitachi 280 B-R OK LT 1 cm Volvo 290 C2-B OK LT 1 cm D6 C2-C OK LT 1 cm D8 C2-C OK PV 4 cm Cat 345 C2-C OK LT 6 cm Doosan B-R OK LT 2 cm Hitachi 280 B-R OK LT 1 cm D6 C2-C OK LT 1 cm Volvo 290 C2-C OK VV 2 cm D8 C2-B OK VV 5 cm Hitachi 280 B-R OK VV 4 cm 18
23 Cat 345 C2-B OK PV 5 cm Hitachi 280 B-R OK VV 5 cm Volvo 380 O2-O OK VV 1 cm Hitachi 210 B-R OK VV 1 cm D6 C2-C OK PV 2 cm Cat 345 C2-B OK PV 5 cm Doosan B-R OK VV 6 cm Volvo 380 O2-O OK VV 2 cm D6 C2-C OK VV 3 cm D8 C2-C OK VV 3 cm Volvo 210 C2-C OK VV 1 cm Cat 345 C-C2-B OK VV 3 cm Doosan B-R OK VV 6 cm Volvo 290 C2-C OK MP 1 cm D6 C2-C OK MP 5 cm Cat 345 C2-B OK MP 5 cm Hitachi 280 R OK VV 3 cm Volvo 380 O2-O OK VV 4 mm D6 O2-O OK VV 2 cm Cat 345 C2-C OK VV 6 cm Volvo 380 O2-O OK MP 2 cm Cat 345 C2-c OK MP 1 cm D6 C2-C OK MP 2 cm Cat 345 C2 OK VV 2,5 cm 19
24 D6 C2-C OK VV 4 mm Doosan R-O OK VV 5 cm Hitachi 280 R-O OK VV 3 cm Doosan R-O OK LT 6 cm Volvo 380 O2-O OK LT 5 cm Volvo 290 Loussa ledning OK LT 1 cm Doosan R-O OK LT 7 cm Hitachi 280 R-O OK LT 2 cm Hitachi 210 C2-B OK PV D6 C2-C OK MP 1 cm Cat 345 C2-C OK! MP 8 cm Volvo 380 O2-O OK PV 2 cm Doosan R-O OK LT 1 cm Hitachi R-O OK LT 3 cm Hitachi 210 C2-C OK LT 2 cm Cat 345 C2-C OK LT 2 cm Volvo 290 Loussa ledning OK PV 2 cm Volvo 380 O2-O OK LT 4 cm D6 C2-C OK LT 1 cm Doosan R-O OK LT 3 cm Hitachi R-O OK LT 4 cm Hitachi 210 C2-C OK LT 1 cm D6 C2-C OK MP 2 cm 20
25 Volvo 290 Loussa ledning OK MP 1 cm Volvo 380 O2-O OK MP 4 cm Hitachi B-R OK VV 6 cm Hitachi 210 C2-C OK VV 3 cm Cat 345 B-R OK VV 3 cm Cat 385 O2-O OK MP 4 cm Volvo 290 C2-C OK MP Hitachi 210 C2-C OK MP 1 cm D8 O2-O OK MP 7 cm D6 C2-C OK MP 2 cm Volvo 380 O2-O OK MP 3 cm Doosan R-O OK VV 6 cm Cat 345 B-R OK VV 2 cm Hitachi R-O OK MP 2 cm Doosan R-O OK MP 3 cm Cat 345 B-R OK MP 7 cm D6 C2-C OK VV 2 cm Volvo 290 C2-C OK VV 1 cm Hitachi 210 C2-C OK MP 1 cm Volvo 380 O2-O OK VV 2 cm Doosan R-O OK LT 5 cm Hitachi R-O OK LT 3 cm Volvo 290 C2-C OK MP 3 cm 21
26 D6 O2-O OK MP 2 cm Hitachi 210 C2-C OK LT 1 cm Volvo 380 O2-O OK LT 1 cm Cat 345 B-R OK LT 2 cm Hitachi R-O OK LT 2 cm Doosan R-O OK LT 7 cm Volvo 290 C2-C OK LT 1 cm Hitachi 210 C2-C OK LT 1 cm D6 O2-O OK LT 1 cm Doosan R-O OK LT 7 cm Hitachi R-O OK LT 6 cm Doosan R-O OK LT 7 cm Hitachi 210 B-R OK JF 2 cm D6 B-R OK JF 1 cm Volvo 290 C2-C OK LT Cat 345 B-R OK JF 1 cm Cat 345 B-R OK JF 1 cm Hitachi 210 B-R OK JF 1 cm Doosan 255 R-O OK JF 1 cm Hitachi 280 R-O OK JF 2 cm Volvo 290 C2-C OK VV 1 cm D6 B-R OK JF 3 cm Hitachi 280 R-O OK JF 3 cm 22
27 Cat 345 R-O OK JF 2 cm Hitachi 210 B-R OK JF 2 cm Doosan R-O OK JF 5 cm Volvo 290 C2-C OK VV 1 cm Volvo 380 O2-O OK VV 2 cm Hitachi 280 O2-O OK VV 3 cm Daewoo 255 R-O OK JF 1 cm Hitachi 210 B-R OK JF 2cm Hitachi 280 R-O OK JF 2 cm Volvo 290 C2-C OK VV Volvo 380 O2-O OK VV 2 cm Volvo 290 C2-B OK MP 3 cm D6 O2-O OK MP 1 cm Volvo 290 C2-C OK MP 2 cm Volvo 380 O2-O OK MP 2 cm Hitachi 280 O2-O OK MP 6 cm Doosan R-O OK JF Cat 345 B-R OK JF 2 cm Hitachi 280 O2-O OK MP 8 cm Daewoo 255 B-R OK JF Hitachi 280 O2-O OK LT 4 cm D6 C2-C OK EZ 2 cm Volvo 380 O2-O OK LT 0 23
28 Volvo 290 Loussa ledning OK LT 2 cm Doosan O2-O OK MP 6 cm Daewoo 255 R-O OK MP 2 cm Cat 345 R-O OK MP 4 cm Doosan O2-O OK MP 5 cm Hitachi 280 O2-O OK LT 1 cm Volvo 290 C-O2 OK LT 1 cm D6 C2-C OK LT Volvo 380 O2-O OK LT Cat 345 O2-O OK LT Doosan O2-O OK MP 3 cm Daewoo Daewoo 255 R-O OK MP 0 R-O OK MP 2 cm Volvo 210 R-O OK MP 2 cm Volvo 380 R-O OK MP 1 cm Doosan O2-O OK MP 4 cm Volvo 290 C-O2 OK VV 2 cm Hitachi 280 C-O2 OK VV 1 cm Daewoo 255 R-O OK MP 2 cm Volvo 210 R-O OK MP 5 cm Doosan O2-O OK MP 7 cm 24
29 Volvo 380 R-O OK MP Hitachi 280 O2-O OK VV 7 cm Volvo 380 R-O OK MP 1 cm Daewoo 255 O2-O OK MP 2 cm Volvo 210 O2-O OK MP 3 cm Volvo 380 O2-O OK MP 2 cm Doosan O2-O OK MP 7 cm Hitachi 280 O2-O OK MP Cat 345 R-O OK MP 3 cm Cat 345 R-O OK MP 3 cm Volvo 210 B-R OK MP 1 cm Hitachi 280 O2-O OK JF Volvo 380 O2-O OK JF D6 R-O OK MP 1 cm Doosan O2-O OK MP 9 cm Volvo 380 C2-C OK JF 3 cm Hitachi 280 O2-O OK JF 2 cm Volvo 290 O2-O OK JF 5 cm Cat 345 R-O OK JF 2 cm D6 R-O OK JF 4 cm Volvo 380 O2-O OK JF 3 cm Doosan R-O OK MP 4 cm 25
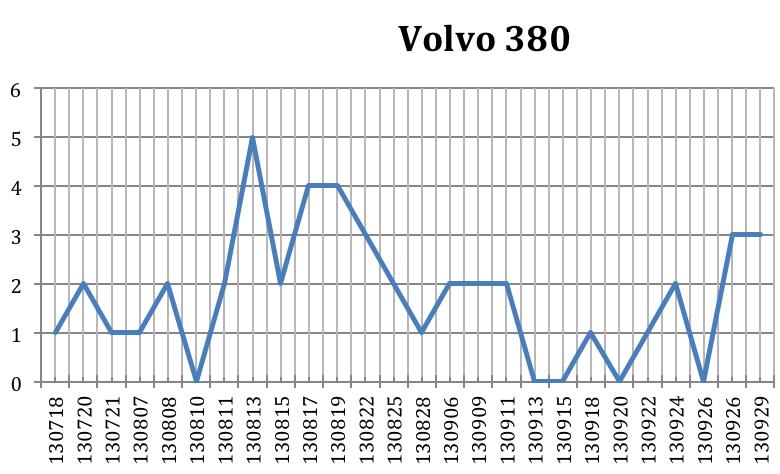
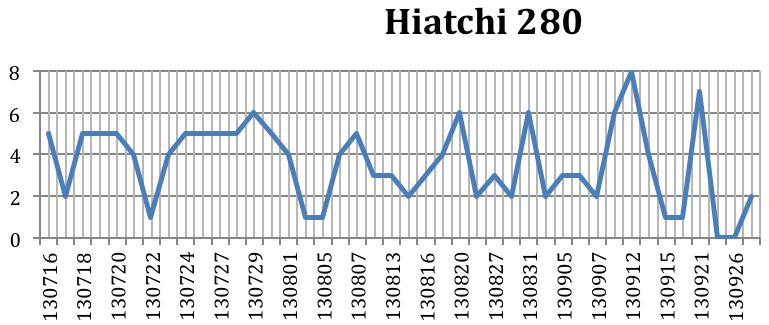
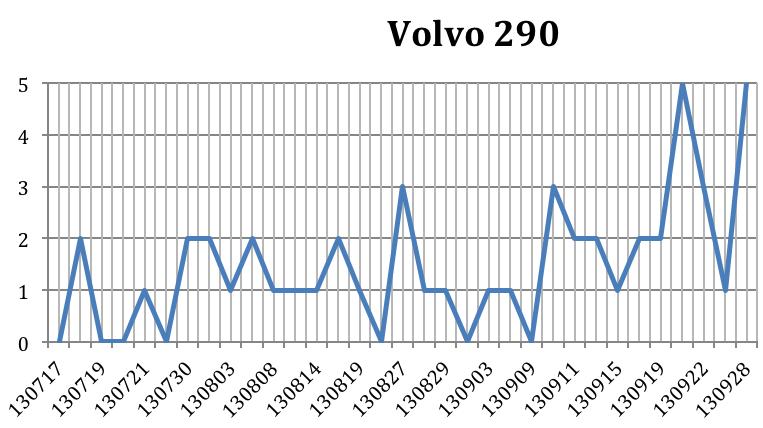
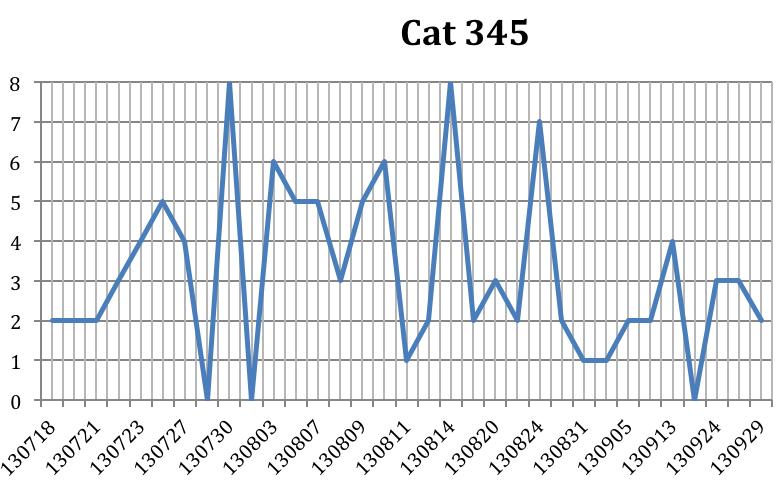
30 8.6 Diagram över maskinkontroll Här har jag avrundat höjderna till hela centimeter. Sedan gjorde jag inget diagram för Cat385 då vi hade kontrollerat den så pass få gånger, på grund av att maskinen har kört relativt lite på maskinstyrning under projektet. 26
31 27
32 28
33 29
34 30
35 31
36 32
37 33
38 34
39 35
EXAMENSARBETE. Totalstation jämförd med mmgps. David Olsson. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Totalstation jämförd med mmgps David Olsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Totalstation jämförd med mmgps
EXAMENSARBETE Totalstation jämförd med mmgps David Olsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Totalstation jämförd med mmgps
Maskinstyrning i 2D och 3D Kontrollmätning av noggrannheter på grävsystem
 INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ Maskinstyrning i 2D och 3D Kontrollmätning av noggrannheter på grävsystem Daniel Ohlsson Maj 2009 Geomatikprogrammet, 15 högskolepoäng (B nivå ) Handledare: Pia
INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ Maskinstyrning i 2D och 3D Kontrollmätning av noggrannheter på grävsystem Daniel Ohlsson Maj 2009 Geomatikprogrammet, 15 högskolepoäng (B nivå ) Handledare: Pia
EXAMENSARBETE. GPS och Maskinstyrning. Framtagning av modeller i projektering. Stefan Pounu. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE GPS och Maskinstyrning Framtagning av modeller i projektering Stefan Pounu Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser
EXAMENSARBETE GPS och Maskinstyrning Framtagning av modeller i projektering Stefan Pounu Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser
EXAMENSARBETE. Avvägning och inmätning av Stockholms stadion. Eduwin Pena Hernandez 2014. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Avvägning och inmätning av Stockholms stadion Eduwin Pena Hernandez 2014 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser
EXAMENSARBETE Avvägning och inmätning av Stockholms stadion Eduwin Pena Hernandez 2014 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser
EXAMENSARBETE. SiteLink 3D kopplat till Dynaroad. Ludwig Sandberg Högskoleexamen Bygg och anläggning
 EXAMENSARBETE SiteLink 3D kopplat till Dynaroad Ludwig Sandberg 2014 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Ludwig Sandberg SiteLink
EXAMENSARBETE SiteLink 3D kopplat till Dynaroad Ludwig Sandberg 2014 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Ludwig Sandberg SiteLink
EXAMENSARBETE. Val av mätinstrument. Eli Ellvall Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Val av mätinstrument Eli Ellvall 2015 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser ( Val av mätinstrument Eli Ellvall
EXAMENSARBETE Val av mätinstrument Eli Ellvall 2015 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser ( Val av mätinstrument Eli Ellvall
EXAMENSARBETE. Maskinstyrning, pistmaskin, Storklinten, Boden. Fredrik Henriksson Mikael Johansson 2013. Högskoleexamen Samhällsbyggnad
 EXAMENSARBETE Maskinstyrning, pistmaskin, Storklinten, Boden Fredrik Henriksson Mikael Johansson 2013 Högskoleexamen Samhällsbyggnad Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser
EXAMENSARBETE Maskinstyrning, pistmaskin, Storklinten, Boden Fredrik Henriksson Mikael Johansson 2013 Högskoleexamen Samhällsbyggnad Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser
EXAMENSARBETE. Terrängmodellering. Martin Ström. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Martin Ström Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Martin Ström Förord Som en del i utbildningen Bygg och Anläggning
EXAMENSARBETE Martin Ström Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Martin Ström Förord Som en del i utbildningen Bygg och Anläggning
Forskning GNSS. Grundkonfigurationen av GPS består av 24 satelliter men idag cirkulerar närmare 30 satelliter runt jordklotet
 Forskning GNSS GNSS (Global Navigation Satellite Systems) är samlingsnamnet för globala satellitbaserade system för navigation, positionsbestämning och tidsöverföring. Det mest kända och använda systemet
Forskning GNSS GNSS (Global Navigation Satellite Systems) är samlingsnamnet för globala satellitbaserade system för navigation, positionsbestämning och tidsöverföring. Det mest kända och använda systemet
GPS-sändare: en ny era för studier av beteendeekologi hos vilda djur
 GPS-sändare: en ny era för studier av beteendeekologi hos vilda djur Håkan Sand, Per Ahlqvist och Olof Liberg I slutet av 196-talet revolutionerades viltforskningen genom att det blev möjligt att studera
GPS-sändare: en ny era för studier av beteendeekologi hos vilda djur Håkan Sand, Per Ahlqvist och Olof Liberg I slutet av 196-talet revolutionerades viltforskningen genom att det blev möjligt att studera
Vi finns där vi behövs:
 Vi finns där vi behövs: Mer än 25 års erfarenhet inom maskinstyrning gör Scanlaser till ett tryggt val! Med en rikstäckande organisation finns vi där vi behövs för personlig service och support. Scanlaser
Vi finns där vi behövs: Mer än 25 års erfarenhet inom maskinstyrning gör Scanlaser till ett tryggt val! Med en rikstäckande organisation finns vi där vi behövs för personlig service och support. Scanlaser
MANUAL L5 3DX L5 Navigation Systems AB 2019
 MANUAL L5 3DX L5 Navigation Systems AB 2019 INNEHÅLL Projektinställningar... 2 Ytor & Planfiler... 12 Ytor... 13 Planfiler... 14 Export & import av ett befintligt projekt mellan maskiner... 16 Export av
MANUAL L5 3DX L5 Navigation Systems AB 2019 INNEHÅLL Projektinställningar... 2 Ytor & Planfiler... 12 Ytor... 13 Planfiler... 14 Export & import av ett befintligt projekt mellan maskiner... 16 Export av
Maskinstyrning. i mindre anläggningsprojekt. Examensarbete: Stefan Svensson. LTH Ingenjörshögskolan vid Campus Helsingborg
 Maskinstyrning i mindre anläggningsprojekt LTH Ingenjörshögskolan vid Campus Helsingborg Examensarbete: Stefan Svensson Copyright Stefan Svensson LTH Ingenjörshögskolan vid Campus Helsingborg Lunds universitet
Maskinstyrning i mindre anläggningsprojekt LTH Ingenjörshögskolan vid Campus Helsingborg Examensarbete: Stefan Svensson Copyright Stefan Svensson LTH Ingenjörshögskolan vid Campus Helsingborg Lunds universitet
EXAMENSARBETE. Analys av produktionseffektiviteten inom byggservicen. Simon Lundstig 2013. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Analys av produktionseffektiviteten inom byggservicen Simon Lundstig 2013 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser
EXAMENSARBETE Analys av produktionseffektiviteten inom byggservicen Simon Lundstig 2013 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser
EXAMENSARBETE. Från kalkyl och inköp till platschef. Robin Antfolk 2014. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Från kalkyl och inköp till platschef Robin Antfolk 2014 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Från kalkyl och inköp
EXAMENSARBETE Från kalkyl och inköp till platschef Robin Antfolk 2014 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Från kalkyl och inköp
Fakulteten för humaniora och samhällsvetenskap. Naturgeografi. Caroline Carlsson och Matilda Tidholm. Maskinstyrning.
 Fakulteten för humaniora och samhällsvetenskap Naturgeografi Caroline Carlsson och Matilda Tidholm Maskinstyrning Maskinstyrning och dess användning ur ett geodetiskt perspektiv. Machine control Machine
Fakulteten för humaniora och samhällsvetenskap Naturgeografi Caroline Carlsson och Matilda Tidholm Maskinstyrning Maskinstyrning och dess användning ur ett geodetiskt perspektiv. Machine control Machine
X-53. Utbildning Topcon 3DMC. System för 3D Maskinstyrning av Entreprenadmaskiner
 X-53 Utbildning Topcon 3DMC System för 3D Maskinstyrning av Entreprenadmaskiner 1 Grunder GNSS, RTK, Bas, Rover Antennsymbolenindikerar att antennerna tar emot satellitsignaler. Radioantennsymbolen indikerar
X-53 Utbildning Topcon 3DMC System för 3D Maskinstyrning av Entreprenadmaskiner 1 Grunder GNSS, RTK, Bas, Rover Antennsymbolenindikerar att antennerna tar emot satellitsignaler. Radioantennsymbolen indikerar
DPS900 Maskinstyrningssystem för borrning och pålning (Drilling and Piling)
") DPS900 Maskinstyrningssystem för borrning och pålning (Drilling and Piling) Trimble DPS900 för pålning Trimble DPS900 Pålningssystem är ett 3D-system för alla typer av pålningsuppdrag. DPS900 är baserat
DPS900 Maskinstyrningssystem för borrning och pålning (Drilling and Piling) Trimble DPS900 för pålning Trimble DPS900 Pålningssystem är ett 3D-system för alla typer av pålningsuppdrag. DPS900 är baserat
EXAMENSARBETE. Cirkulationsplats Mullberget. Arbetsbeskrivning. Markus Hällberg. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Cirkulationsplats Mullberget Arbetsbeskrivning Högskoleexamen Bygg och anläggning Institutionen för samhällsbyggnad och naturresurser Bygg och Anläggning Cirkulationsplats Mullberget, arbetsbeskrivning
EXAMENSARBETE Cirkulationsplats Mullberget Arbetsbeskrivning Högskoleexamen Bygg och anläggning Institutionen för samhällsbyggnad och naturresurser Bygg och Anläggning Cirkulationsplats Mullberget, arbetsbeskrivning
EXAMENSARBETE. Ledning och planering. Skillnader mellan militär och entreprenadledning. Robin Boqvist Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Skillnader mellan militär och entreprenadledning 2014 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Skillnader mellan militär
EXAMENSARBETE Skillnader mellan militär och entreprenadledning 2014 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Skillnader mellan militär
Installationshjälp EZ-dig Grävsystem
 Installationshjälp EZ-dig Grävsystem Vi gratulerar dig till ditt köp av det enklaste grävsystemet på marknaden, och hoppas du att skall få mycket hjälp av din investering. Läs igenom denna hjälp till installation
Installationshjälp EZ-dig Grävsystem Vi gratulerar dig till ditt köp av det enklaste grävsystemet på marknaden, och hoppas du att skall få mycket hjälp av din investering. Läs igenom denna hjälp till installation
Maskinstyrningssystem och hantering av digitala terrängmodeller
 Maskinstyrningssystem och hantering av digitala terrängmodeller Anders Nyman Martin Tillander EXAMENSARBETE 2010 Byggnadsteknik Postadress: Besöksadress: Telefon: Box 1026 Gjuterigatan 5 036-10 10 00 (vx)
Maskinstyrningssystem och hantering av digitala terrängmodeller Anders Nyman Martin Tillander EXAMENSARBETE 2010 Byggnadsteknik Postadress: Besöksadress: Telefon: Box 1026 Gjuterigatan 5 036-10 10 00 (vx)
Maskinkontroll Katalog
 Maskinkontroll Katalog Introduktion Automatisering av arbetsplatsen för lönsamma projekt Topcon är världsledande inom tillverkning av positionerings och kontrollinstrument och fortsätter att sätta världsstandarden
Maskinkontroll Katalog Introduktion Automatisering av arbetsplatsen för lönsamma projekt Topcon är världsledande inom tillverkning av positionerings och kontrollinstrument och fortsätter att sätta världsstandarden
Trygghetsavtal. Scanlasers. för ökad driftsäkerhet. Vi finns där vi behövs: Huvudkontor Sverige. Scanlaser Östra. Scanlaser Mellan.
 Vi finns där vi behövs: Mer än 25 års erfarenhet inom maskinstyrning gör Scanlaser till ett tryggt val! Med en rikstäckande organisation finns vi där vi behövs för personlig service och support. Scanlaser
Vi finns där vi behövs: Mer än 25 års erfarenhet inom maskinstyrning gör Scanlaser till ett tryggt val! Med en rikstäckande organisation finns vi där vi behövs för personlig service och support. Scanlaser
EXAMENSARBETE. Effektivisering av daglig rapportering. Johan Larsson. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Johan Larsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Johan Larsson Sammanfattning Under min verksamhetsförlagda
EXAMENSARBETE Johan Larsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Johan Larsson Sammanfattning Under min verksamhetsförlagda
Cargolog Impact Recorder System
 Cargolog Impact Recorder System MOBITRON Mobitron AB Box 241 561 23 Huskvarna, Sweden Tel +46 (0)36 512 25 Fax +46 (0)36 511 25 Att mäta är att veta Vi hjälper dig och dina kunder minska skador och underhållskostnader
Cargolog Impact Recorder System MOBITRON Mobitron AB Box 241 561 23 Huskvarna, Sweden Tel +46 (0)36 512 25 Fax +46 (0)36 511 25 Att mäta är att veta Vi hjälper dig och dina kunder minska skador och underhållskostnader
Leica mojo3d start första gången
 Leica mojo3d start första gången Generellt Denna instruktion visar hur du kommer igång med Leica mojo3d första gången. För mer detaljerade instruktioner se Leica mojo3d användarmanual. Beroende på version
Leica mojo3d start första gången Generellt Denna instruktion visar hur du kommer igång med Leica mojo3d första gången. För mer detaljerade instruktioner se Leica mojo3d användarmanual. Beroende på version
Guidning/Autostyrning
 Redovisning av projekt till Partnerskap Alnarp, nr 45/05/005 Guidning/Autostyrning Demonstration och seminarium Den 29 och 30 juni 2005 genomförde HIR Malmöhus och LT, SLU med medel från Partnerskap Alnarp
Redovisning av projekt till Partnerskap Alnarp, nr 45/05/005 Guidning/Autostyrning Demonstration och seminarium Den 29 och 30 juni 2005 genomförde HIR Malmöhus och LT, SLU med medel från Partnerskap Alnarp
BEHÖVER DU SUPPORT, ring: Snabbguide GCS900 Grävmaskin
 www.sitech-sverige.com BEHÖVER DU SUPPORT, ring: 010-456 80 00 Snabbguide GCS900 Grävmaskin 1 Grundläggande information om kontrollenheten Kontrollenheten har en LCD-färgskärm där styrinformation och annan
www.sitech-sverige.com BEHÖVER DU SUPPORT, ring: 010-456 80 00 Snabbguide GCS900 Grävmaskin 1 Grundläggande information om kontrollenheten Kontrollenheten har en LCD-färgskärm där styrinformation och annan
Trimtec.se - Auktoriserad Trimble dealer för hela Sverige
 Trimtec.se - Auktoriserad Trimble dealer för hela Sverige Auktoriserad Trimble återförsäljare Service Support Utbildning Uthyrning Försäljning Gatewing Vad vi kan erbjuda! Skanning Tillbehör Service Survey
Trimtec.se - Auktoriserad Trimble dealer för hela Sverige Auktoriserad Trimble återförsäljare Service Support Utbildning Uthyrning Försäljning Gatewing Vad vi kan erbjuda! Skanning Tillbehör Service Survey
EXAMENSARBETE. Montering och tillverkning av prefabricerad cirkulationsplats. Mikael Kemppainen. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE prefabricerad cirkulationsplats Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Förord Jag skulle vilja tacka HÖ Allbygg
EXAMENSARBETE prefabricerad cirkulationsplats Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Förord Jag skulle vilja tacka HÖ Allbygg
Arbetsmiljö vid stubbskörd. Ett material för förare, entreprenörer och uppdragsgivare
 Arbetsmiljö vid stubbskörd Ett material för förare, entreprenörer och uppdragsgivare I kommande bilder visas vanliga arbetssituationer i samband med stubbskörd. Till bilderna lyfts frågeställningar för
Arbetsmiljö vid stubbskörd Ett material för förare, entreprenörer och uppdragsgivare I kommande bilder visas vanliga arbetssituationer i samband med stubbskörd. Till bilderna lyfts frågeställningar för
Åtgärder på mindre fyllningsdammar i södra Sverige
 Åtgärder på mindre fyllningsdammar i södra Sverige Jill Holmberg o. Tina Påhlstorp, ÅF 2016-10-25 1 Exempel: Konskevensklass 3 damm 2 Efter en överdämning i augusti 2014 observerades två skador i fyllningsdammen.
Åtgärder på mindre fyllningsdammar i södra Sverige Jill Holmberg o. Tina Påhlstorp, ÅF 2016-10-25 1 Exempel: Konskevensklass 3 damm 2 Efter en överdämning i augusti 2014 observerades två skador i fyllningsdammen.
BÄST NÄR DET GÄLLER. Top Position syns på mässor Top Position har visat upp sig på två betydande mässor.
 Topcons basstationer NYHETER FRÅN TOP POSITION AB SPECIALISTEN PÅ PRECISION NR 1 2013 BÄST NÄR DET GÄLLER Sundsvalls Mätcenter levererar Top Position basstationstjänst till Trafikverkets projekt på Hjulsta
Topcons basstationer NYHETER FRÅN TOP POSITION AB SPECIALISTEN PÅ PRECISION NR 1 2013 BÄST NÄR DET GÄLLER Sundsvalls Mätcenter levererar Top Position basstationstjänst till Trafikverkets projekt på Hjulsta
LEICA MOJOMINI MANUAL FÄLTGUIDE
 LEICA MOJOMINI MANUAL FÄLTGUIDE Oderup 9267, 24297 Hörby, 0415-40025, info@datalogisk.se Montering mojomini Allmänt Denna instruktion beskriver kortfattat installation av mojomini. Smart AG antennen Smart
LEICA MOJOMINI MANUAL FÄLTGUIDE Oderup 9267, 24297 Hörby, 0415-40025, info@datalogisk.se Montering mojomini Allmänt Denna instruktion beskriver kortfattat installation av mojomini. Smart AG antennen Smart
Maskinstyrd planfräsning
 Maskinstyrd planfräsning DV03 2010 E45 Frändefors-Brålanda Kort rapport 2010-11-12 0. SAMMANFATTNING Vid underhållsprojektet DV03 2010 E45 Frändefors-Brålanda har fräsningen (första halvan av juni 2010)
Maskinstyrd planfräsning DV03 2010 E45 Frändefors-Brålanda Kort rapport 2010-11-12 0. SAMMANFATTNING Vid underhållsprojektet DV03 2010 E45 Frändefors-Brålanda har fräsningen (första halvan av juni 2010)
Teknik kommande och förekommande
 Teknik kommande och förekommande Den intelligenta gården MÄTA STYRA/REGLERA AUTOMATISERA Standardiserad kommunikation CANBUS ISOBUS ISOAGRINET Internet of things Sensornätverk Farm Management Information
Teknik kommande och förekommande Den intelligenta gården MÄTA STYRA/REGLERA AUTOMATISERA Standardiserad kommunikation CANBUS ISOBUS ISOAGRINET Internet of things Sensornätverk Farm Management Information
KONTROLL AV DSRC I SMARTA FÄRDSKRIVARE 1(16)
") KONTROLL AV DSRC I SMARTA FÄRDSKRIVARE 1(16) I samband med en kalibrering av en färdskrivare tillverkad enligt bilaga 1C till Kommissionens genomförandeförordning (EU) 2016/799 måste funktionen av dess
KONTROLL AV DSRC I SMARTA FÄRDSKRIVARE 1(16) I samband med en kalibrering av en färdskrivare tillverkad enligt bilaga 1C till Kommissionens genomförandeförordning (EU) 2016/799 måste funktionen av dess
Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst
 Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst I denna checklista redovisas en del allmänna råd angående hur nätverks-rtk-tekniken bör användas för att uppnå ett tillfredställande
Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst I denna checklista redovisas en del allmänna råd angående hur nätverks-rtk-tekniken bör användas för att uppnå ett tillfredställande
DIGITAL KOMMUNIKATION MOT MASKINSTYRDA ANLÄGGNINGSMASKINER SBUF Projekt nr 11918
 DIGITAL KOMMUNIKATION MOT MASKINSTYRDA ANLÄGGNINGSMASKINER SBUF Projekt nr 11918 En principskiss på ett anläggningsprojekt med guidade och styrda maskiner som får sin position via GPSsystem men som även
DIGITAL KOMMUNIKATION MOT MASKINSTYRDA ANLÄGGNINGSMASKINER SBUF Projekt nr 11918 En principskiss på ett anläggningsprojekt med guidade och styrda maskiner som får sin position via GPSsystem men som även
SNABBGUIDE för Leica Geosystems 3D/GPS grävsystem. Snabbguide-3D_MCP80_2018.indd :18:59
 SNABBGUIDE för Leica Geosystems 3D/GPS grävsystem Snabbguide-3D_MCP80_2018.indd 1 2018-05-15 13:18:59 SKOPKALIBRERING: Översikt Justering av skopans inmätning/kalibrering bör underhållas allt eftersom
SNABBGUIDE för Leica Geosystems 3D/GPS grävsystem Snabbguide-3D_MCP80_2018.indd 1 2018-05-15 13:18:59 SKOPKALIBRERING: Översikt Justering av skopans inmätning/kalibrering bör underhållas allt eftersom
HANDBOK för dig som ska installera optofiber ansluten till Härjedalens kommuns byanät.
 HANDBOK för dig som ska installera optofiber ansluten till Härjedalens kommuns byanät. Innehållsförteckning Fakta om din fiberkabel sid 2 Steg för steg sid 3 Installationsanvisningar sid 3-4 Inför anslutningen
HANDBOK för dig som ska installera optofiber ansluten till Härjedalens kommuns byanät. Innehållsförteckning Fakta om din fiberkabel sid 2 Steg för steg sid 3 Installationsanvisningar sid 3-4 Inför anslutningen
EXAMENSARBETE. Satellitguidning av grävmaskiner
 EXAMENSARBETE 2008:229 CIV Satellitguidning av grävmaskiner En utvärdering av systemets effekter Henric Jonsson Luleå tekniska universitet Civilingenjörsprogrammet Väg- och vattenbyggnadsteknik Institutionen
EXAMENSARBETE 2008:229 CIV Satellitguidning av grävmaskiner En utvärdering av systemets effekter Henric Jonsson Luleå tekniska universitet Civilingenjörsprogrammet Väg- och vattenbyggnadsteknik Institutionen
Dammhöjning säkerställer fortsatt gruvdrift Hans Häggström Vattenkraftens FoU-dagar maj Stockholm, KTH
 Dammhöjning säkerställer fortsatt gruvdrift Hans Häggström Vattenkraftens FoU-dagar 13-14 maj Stockholm, KTH 1 Disposition Boliden Mineral AB Bolidenområdet Anrikningssand, sandmagasin och gruvdammar Hötjärnsmagasinet
Dammhöjning säkerställer fortsatt gruvdrift Hans Häggström Vattenkraftens FoU-dagar 13-14 maj Stockholm, KTH 1 Disposition Boliden Mineral AB Bolidenområdet Anrikningssand, sandmagasin och gruvdammar Hötjärnsmagasinet
Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning
 Fakulteten för humaniora och samhällsvetenskap Naturgeografi Magnus Wallsten Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning Comparison
Fakulteten för humaniora och samhällsvetenskap Naturgeografi Magnus Wallsten Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning Comparison
Global Positioning System GPS i funktion
 Global Positioning System GPS i funktion Martin Åhlenius ECOP mas00001@student.mdh.se Andreas Axelsen ECOP aan00006@student.mdh.se 15 oktober 2003 i Sammanfattning Denna rapport försöker förklara funktionen
Global Positioning System GPS i funktion Martin Åhlenius ECOP mas00001@student.mdh.se Andreas Axelsen ECOP aan00006@student.mdh.se 15 oktober 2003 i Sammanfattning Denna rapport försöker förklara funktionen
Maskinstyrning på småskaliga markentreprenader
 Maskinstyrning på småskaliga markentreprenader Examensarbete inom högskoleingenjörsprogrammet Byggingenjör MALIN BERNDTSSON Institutionen för bygg- och miljöteknik Avdelningen geologi och teknik Gruppen
Maskinstyrning på småskaliga markentreprenader Examensarbete inom högskoleingenjörsprogrammet Byggingenjör MALIN BERNDTSSON Institutionen för bygg- och miljöteknik Avdelningen geologi och teknik Gruppen
PROFILMÄTNINGAR VID YSTAD SANDSKOG OCH LÖDERUPS STRANDBAND
 Varbergsgatan B 65 GÖTEBORG Tel -7655 Fax -7799 PROFILMÄTNINGAR VID YSTAD SANDSKOG OCH LÖDERUPS STRANDBAD PROFILMÄTNINGAR VID YSTAD SANDSKOG OCH LÖDERUPS STRANDBAND U55656 Göteborg 6-8 Marin Miljöanalys
Varbergsgatan B 65 GÖTEBORG Tel -7655 Fax -7799 PROFILMÄTNINGAR VID YSTAD SANDSKOG OCH LÖDERUPS STRANDBAD PROFILMÄTNINGAR VID YSTAD SANDSKOG OCH LÖDERUPS STRANDBAND U55656 Göteborg 6-8 Marin Miljöanalys
Differentiell GPS för rörelsemätning av betongdammar
 Differentiell GPS för rörelsemätning av betongdammar Kraftindustrins Betongdag 2015 2015-04-23 1 Resultat från doktorandprojekt 2006 Tillståndskontroll av betongdammar genom instrumentering för automatisk
Differentiell GPS för rörelsemätning av betongdammar Kraftindustrins Betongdag 2015 2015-04-23 1 Resultat från doktorandprojekt 2006 Tillståndskontroll av betongdammar genom instrumentering för automatisk
Bilaga 1: GPS-teknik, en liten ordlista
 Bilaga 1: GPS-teknik, en liten ordlista SATELLITSYSTEM GPS Global Positioning System. Amerikanskt satellitbaserat navigationssystem uppbyggt av USA:s försvarsmakt. Systemet är globalt täckande och används
Bilaga 1: GPS-teknik, en liten ordlista SATELLITSYSTEM GPS Global Positioning System. Amerikanskt satellitbaserat navigationssystem uppbyggt av USA:s försvarsmakt. Systemet är globalt täckande och används
Alla vardagar 06:00-17:00. Scanlaser Support-Center. Personlig support när du behöver det.
 Scanlaser Support-Center LULEÅ 0771-93 20 00 SKELLEFTEÅ Personlig support när du behöver det. SUNDSVALL/TIMRÅ BOLLNÄS AVESTA Alla vardagar 06:00-17:00 BULLAREN GÖTEBORG ÖREBRO SOLLENTUNA/STOCKHOLM LINKÖPING
Scanlaser Support-Center LULEÅ 0771-93 20 00 SKELLEFTEÅ Personlig support när du behöver det. SUNDSVALL/TIMRÅ BOLLNÄS AVESTA Alla vardagar 06:00-17:00 BULLAREN GÖTEBORG ÖREBRO SOLLENTUNA/STOCKHOLM LINKÖPING
Maskinguidning på webben - nästa steg. Tomas Sandström
 Maskinguidning på webben - nästa steg Tomas Sandström Maskinguidning Maskinguidningens akilleshäl Maskinguidning 1.0 Idag sker en projektering av många olika parter som levererar en PDF-fil för att få
Maskinguidning på webben - nästa steg Tomas Sandström Maskinguidning Maskinguidningens akilleshäl Maskinguidning 1.0 Idag sker en projektering av många olika parter som levererar en PDF-fil för att få
Utbildningsplan Bygg och anläggning för läsåret 2008/2009. Utbildningsplanen är reviderad 2007-11-08 av Ordförande teknisk fakultetsnämnd.
 Utbildningsplan Bygg och anläggning för läsåret 2008/2009 Works Management in Civil Engineering Utbildningsplanen är reviderad 2007-11-08 av Ordförande teknisk fakultetsnämnd. Antagen V09 Denna utbildningsplan
Utbildningsplan Bygg och anläggning för läsåret 2008/2009 Works Management in Civil Engineering Utbildningsplanen är reviderad 2007-11-08 av Ordförande teknisk fakultetsnämnd. Antagen V09 Denna utbildningsplan
Radio-ockultation med GNSS för atmosfärsmätningar
 Radio-ockultation med GNSS för atmosfärsmätningar Rymdforum 9-10 mars 2015 Joel Rasch Molflow Innehåll Radio-ockultation, kort historik Radio-ockultation med GNSS Dagens satelliter Användningsområden 2
Radio-ockultation med GNSS för atmosfärsmätningar Rymdforum 9-10 mars 2015 Joel Rasch Molflow Innehåll Radio-ockultation, kort historik Radio-ockultation med GNSS Dagens satelliter Användningsområden 2
1. Använda denna bruksanvisning
 1. Använda denna bruksanvisning Sektionsrubrik Ett nummer och en rubrik finns för varje sektion. Avsnittsrubrik Varje avsnitt har en rubrik. Åtgärdsnamn Varje åtgärd har ett namn. Specifikt åtgärdsnamn
1. Använda denna bruksanvisning Sektionsrubrik Ett nummer och en rubrik finns för varje sektion. Avsnittsrubrik Varje avsnitt har en rubrik. Åtgärdsnamn Varje åtgärd har ett namn. Specifikt åtgärdsnamn
Kvalitetskontroll laserscanning Göta- och Nordre älvs dalgångar
 Kvalitetskontroll laserscanning Göta- och Nordre älvs dalgångar Scanning utförd maj 2006 Mats Nyborg 2006-11-16 VATTENFALL POWER CONSULTANT Dokumenttyp Dokumentidentitet Rev. nr. Rapportdatum Uppdragsnummer
Kvalitetskontroll laserscanning Göta- och Nordre älvs dalgångar Scanning utförd maj 2006 Mats Nyborg 2006-11-16 VATTENFALL POWER CONSULTANT Dokumenttyp Dokumentidentitet Rev. nr. Rapportdatum Uppdragsnummer
Trimble GCSFlex Grade Control System. Du gräver mer noggrant rätt och slätt
 Trimble GCSFlex Grade Control System Du gräver mer noggrant rätt och slätt Med GCSFlex ökar din komkurrenskraft På YouTube finns instruktionsfilmer och där kan du också se vad andra ntreprenörer tycker
Trimble GCSFlex Grade Control System Du gräver mer noggrant rätt och slätt Med GCSFlex ökar din komkurrenskraft På YouTube finns instruktionsfilmer och där kan du också se vad andra ntreprenörer tycker
Vi finns där vi behövs:
 Vi finns där vi behövs: Mer än 25 års erfarenhet inom maskinstyrning gör Scanlaser till ett tryggt val! Med en rikstäckande organisation finns vi där vi behövs för personlig service och support. Scanlaser
Vi finns där vi behövs: Mer än 25 års erfarenhet inom maskinstyrning gör Scanlaser till ett tryggt val! Med en rikstäckande organisation finns vi där vi behövs för personlig service och support. Scanlaser
CDS-012-P GEODYNAMIK. GPS-option för CDS CDS-012-P /S, 0401
 GPS-option för CDS CDS-012-P CDS-012-P /S, 0401 GEODYNAMIK Innehåll CDS med GPS-positionering - CDS-P... 1 Allmänt... 1 Inställningar... 2 Vältdata... 2 Referenslinje... 3 Registrering... 3 Resultatpresentation...
GPS-option för CDS CDS-012-P CDS-012-P /S, 0401 GEODYNAMIK Innehåll CDS med GPS-positionering - CDS-P... 1 Allmänt... 1 Inställningar... 2 Vältdata... 2 Referenslinje... 3 Registrering... 3 Resultatpresentation...
För den som vill läsa mer kan följande rekommenderas: Skogsbränslehantering en arbetsmiljöhandledning (2012) Arbetsmiljöfaktorer i
 Arbetsmiljöfaktorer i") 1 För den som vill läsa mer kan följande rekommenderas: Skogsbränslehantering en arbetsmiljöhandledning (2012) Arbetsmiljöfaktorer i skogsenergibranschen Fallstudier med fokus på buller, vibrationer och
1 För den som vill läsa mer kan följande rekommenderas: Skogsbränslehantering en arbetsmiljöhandledning (2012) Arbetsmiljöfaktorer i skogsenergibranschen Fallstudier med fokus på buller, vibrationer och
MOBILA ARBETSMASKINER
 MOBILA ARBETSMASKINER Ämnet mobila arbetsmaskiner behandlar olika typer av jordförflyttande och lyftande anläggningsmaskiner, deras utrustning samt hur de hanteras vid olika typer av anläggningsarbete.
MOBILA ARBETSMASKINER Ämnet mobila arbetsmaskiner behandlar olika typer av jordförflyttande och lyftande anläggningsmaskiner, deras utrustning samt hur de hanteras vid olika typer av anläggningsarbete.
TECKENFÖRKLARING - för bättre förståelse av dikningsföretagens förrättningsakter
 TECKENFÖRKLARING - för bättre förståelse av dikningsföretagens förrättningsakter Här ges förklaringar till en del tecken som använts i kartor över dikningsföretag. Sättet att arbeta har varit förvånansvärt
TECKENFÖRKLARING - för bättre förståelse av dikningsföretagens förrättningsakter Här ges förklaringar till en del tecken som använts i kartor över dikningsföretag. Sättet att arbeta har varit förvånansvärt
MASKINSTYRNINGSSYSTEM FRÅN TRIMBLE
 Produktivitet enligt Trimble: Fortare färdig med färre maskiner. Produktivitet är... Planering med program som optimerar transportvägarna för minimerad projekteringstid och -kostnad. Konstruktion med program
Produktivitet enligt Trimble: Fortare färdig med färre maskiner. Produktivitet är... Planering med program som optimerar transportvägarna för minimerad projekteringstid och -kostnad. Konstruktion med program
Upptäck Skogsvinge SKOGSVINGE ÄR EN PRODUKT FRÅN SCA SKOG
 Upptäck Skogsvinge SKOGSVINGE ÄR EN PRODUKT FRÅN SCA SKOG I generationer har vi sett skogen på samma sätt. Tills idag. nu revolutionerar vi metoden för att överblicka din skog. Med verktyget Skogsvinge
Upptäck Skogsvinge SKOGSVINGE ÄR EN PRODUKT FRÅN SCA SKOG I generationer har vi sett skogen på samma sätt. Tills idag. nu revolutionerar vi metoden för att överblicka din skog. Med verktyget Skogsvinge
Effektiv pistning och snöläggning via GPS-mätning
 Effektiv pistning och snöläggning via GPS-mätning 2017-05-05 Åre Snökonferens Per Granås, Sälen Per Granås - Affärsområdeschef lift SkiStar, Sälen samt olika projekt inom Skistar - Snönörd sedan 80 talet
Effektiv pistning och snöläggning via GPS-mätning 2017-05-05 Åre Snökonferens Per Granås, Sälen Per Granås - Affärsområdeschef lift SkiStar, Sälen samt olika projekt inom Skistar - Snönörd sedan 80 talet
PRODUKTINFORMATION HJULHESTEN. Utgåva
 PRODUKTINFORMATION HJULHESTEN Utgåva 2018-01-01 1 PRODUKTINFORMATION Hjulhesten - den smidiga skogsmaskinen Har du saknat en maskin för skogsbruket som verkligen är utvecklad för framkomlighet, kapacitet
PRODUKTINFORMATION HJULHESTEN Utgåva 2018-01-01 1 PRODUKTINFORMATION Hjulhesten - den smidiga skogsmaskinen Har du saknat en maskin för skogsbruket som verkligen är utvecklad för framkomlighet, kapacitet
Utvärdering av personlarm med GPS
 Utvärdering av personlarm med GPS Förutsättningar: EmCom har fått i uppdrag att utvärdera och analysera batteriprestandan hos två personlarm av olika fabrikat genom att ansluta dessa till vårt system och
Utvärdering av personlarm med GPS Förutsättningar: EmCom har fått i uppdrag att utvärdera och analysera batteriprestandan hos två personlarm av olika fabrikat genom att ansluta dessa till vårt system och
Orientera med Gammelstads IF
 Orientera med Gammelstads IF Namn:. 1 Kartans tecken och färger grop åker sjö skog brant Dra ett streck mellan färg och karttecken 2 Karttecken på karta 1 Hitta karttecken och ringa in dem på kartan och
Orientera med Gammelstads IF Namn:. 1 Kartans tecken och färger grop åker sjö skog brant Dra ett streck mellan färg och karttecken 2 Karttecken på karta 1 Hitta karttecken och ringa in dem på kartan och
Provgrävning Omgivningskontroll och vibrationer 2015-05-05 13U22742
 Provgrävning Omgivningskontroll och vibrationer 215-5-5 13U22742 Strandbodgatan 1, Uppsala. Hornsgatan 174, Stockholm. Växel 1-211 8. bjerking.se Sida 1 (1) Provgrävning Uppdragsnamn Humanistiska teatern
Provgrävning Omgivningskontroll och vibrationer 215-5-5 13U22742 Strandbodgatan 1, Uppsala. Hornsgatan 174, Stockholm. Växel 1-211 8. bjerking.se Sida 1 (1) Provgrävning Uppdragsnamn Humanistiska teatern
Statistisk acceptanskontroll
 Publikation 1994:41 Statistisk acceptanskontroll BILAGA 1 Exempel på kontrollförfaranden Metodbeskrivning 908:1994 B1 Exempel på kontrollförfaranden... 5 B1.1 Nivåkontroll av terrassyta, exempel... 5 B1.1.1
Publikation 1994:41 Statistisk acceptanskontroll BILAGA 1 Exempel på kontrollförfaranden Metodbeskrivning 908:1994 B1 Exempel på kontrollförfaranden... 5 B1.1 Nivåkontroll av terrassyta, exempel... 5 B1.1.1
PRODUKTINFORMATION HJULHÄSTEN. Utgåva
 PRODUKTINFORMATION HJULHÄSTEN Utgåva 2018-01-01 1 PRODUKTINFORMATION Hjulhästen - den smidiga skogsmaskinen Har du saknat en maskin för skogsbruket som verkligen är utvecklad för framkomlighet, kapacitet
PRODUKTINFORMATION HJULHÄSTEN Utgåva 2018-01-01 1 PRODUKTINFORMATION Hjulhästen - den smidiga skogsmaskinen Har du saknat en maskin för skogsbruket som verkligen är utvecklad för framkomlighet, kapacitet
X-Route Användarmanual Innehåll
 X-Route Användarmanual Innehåll Innehåll och Produktspecifikation... 2 X-Route Elektronisk Körjournal Produktspecifikation... 2 Kom igång med X-Route Elektronisk Körjournal... 3 För in Mjukvarunyckel...
X-Route Användarmanual Innehåll Innehåll och Produktspecifikation... 2 X-Route Elektronisk Körjournal Produktspecifikation... 2 Kom igång med X-Route Elektronisk Körjournal... 3 För in Mjukvarunyckel...
Uppdrag för LEGO projektet Hitta en vattensamling på Mars
 LEGO projekt Projektets mål är att ni gruppvis skall öva på att genomföra ett projekt. Vi använder programmet LabVIEW för att ni redan nu skall bli bekant med dess grunder till hjälp i kommande kurser.
LEGO projekt Projektets mål är att ni gruppvis skall öva på att genomföra ett projekt. Vi använder programmet LabVIEW för att ni redan nu skall bli bekant med dess grunder till hjälp i kommande kurser.
Montering av antenn Leica GeoPro Antenna
 Montering och anvisningar se även den Engelska manualen i USB minnet filen User Manual Ti5 V100R002 E01 Som passar ihop med Version 1.1.3 av Hexagon Ti5 Montering av antenn Leica GeoPro Antenna 78531.
Montering och anvisningar se även den Engelska manualen i USB minnet filen User Manual Ti5 V100R002 E01 Som passar ihop med Version 1.1.3 av Hexagon Ti5 Montering av antenn Leica GeoPro Antenna 78531.
PATENTBESVÄRSRÄTTENS DOM
 1 (14) Mål nr 12-161 PATENTBESVÄRSRÄTTENS DOM meddelad i Stockholm den 30 november 2015 Klagande Caterpillar Trimble Control Technologies LLC 5475 Kellenburger Road, 45424-1099 Dayton, Ohio, USA Ombud:
1 (14) Mål nr 12-161 PATENTBESVÄRSRÄTTENS DOM meddelad i Stockholm den 30 november 2015 Klagande Caterpillar Trimble Control Technologies LLC 5475 Kellenburger Road, 45424-1099 Dayton, Ohio, USA Ombud:
Innehåll. Bestämning av ojämnheter VV Publ. nr 2001:29 och tvärfall med rätskiva VVMB 107
 Bestämning av ojämnheter VV Publ. nr 2001:29 1 Innehåll 1 Orientering... 3 2 Sammanfattning... 3 3 Utrustning... 3 4 Utförande... 4 4.1 Fördelning av stickprovets kontrollpunkter... 4 4.2 Utsättning av
Bestämning av ojämnheter VV Publ. nr 2001:29 1 Innehåll 1 Orientering... 3 2 Sammanfattning... 3 3 Utrustning... 3 4 Utförande... 4 4.1 Fördelning av stickprovets kontrollpunkter... 4 4.2 Utsättning av
Mätning av W-värde i Bromsprovare med MKII enhet
 Mätning av W-värde i Bromsprovare med MKII enhet Beskrivning av processen runt uppmätning av W-värde i bromsprovare sid 2 Metod för uppmätning av W-värde i bromsprovare sid 3 Kalibreringsmetod för W i
Mätning av W-värde i Bromsprovare med MKII enhet Beskrivning av processen runt uppmätning av W-värde i bromsprovare sid 2 Metod för uppmätning av W-värde i bromsprovare sid 3 Kalibreringsmetod för W i
Lantmäteriets testmätningar med RTK och Galileo i SWEPOS fram till januari 2017
 PM 2017-01-24 Lantmäteriets test med RTK och Galileo i SWEPOS fram till januari 2017 STEFAN ÖBERG, DAN NORIN, FREDRIK STEDT Sammanfattning SWEPOS Nätverks-RTK-tjänst har under många år använt kombinationen
PM 2017-01-24 Lantmäteriets test med RTK och Galileo i SWEPOS fram till januari 2017 STEFAN ÖBERG, DAN NORIN, FREDRIK STEDT Sammanfattning SWEPOS Nätverks-RTK-tjänst har under många år använt kombinationen
Trimble GCSFlex Grade Control System. Du gräver mer noggrant rätt och slätt
 Trimble GCSFlex Grade Control System Du gräver mer noggrant rätt och slätt Med GCSFlex ökar din komkurrenskraft och du kan vara din egen mättekniker Trimble GCSFlex Grade Control System Trimble GCSFlex
Trimble GCSFlex Grade Control System Du gräver mer noggrant rätt och slätt Med GCSFlex ökar din komkurrenskraft och du kan vara din egen mättekniker Trimble GCSFlex Grade Control System Trimble GCSFlex
Utveckling inom maskinguidning för anläggningsarbeten LARS JOHANSSON AND. Examensarbete inom högskoleingenjörsprogrammet Byggingenjör
 Utveckling inom maskinguidning för anläggningsarbeten Examensarbete inom högskoleingenjörsprogrammet Byggingenjör LARS JOHANSSON AND Institutionen för bygg- och miljöteknik CHALMERS TEKNISKA HÖGSKOLA Göteborg
Utveckling inom maskinguidning för anläggningsarbeten Examensarbete inom högskoleingenjörsprogrammet Byggingenjör LARS JOHANSSON AND Institutionen för bygg- och miljöteknik CHALMERS TEKNISKA HÖGSKOLA Göteborg
Orientera med Gammelstads IF
 Orientera med Gammelstads IF FACIT 1 Kartans tecken och färger grop åker sjö skog brant Dra ett streck mellan färg och karttecken 2 Karttecken på karta 1 Hitta karttecken och ringa in dem på kartan 3 Karttecken
Orientera med Gammelstads IF FACIT 1 Kartans tecken och färger grop åker sjö skog brant Dra ett streck mellan färg och karttecken 2 Karttecken på karta 1 Hitta karttecken och ringa in dem på kartan 3 Karttecken
Utvärdering av maskinstyrning
 Utvärdering av maskinstyrning Tommy Åbacka Examensarbete för ingenjörs (YH)-examen Utbildningsprogrammet för lantmäteriteknik Vasa 2011 EXAMENSARBETE Författare: Tommy Åbacka Utbildningsprogram och ort:
Utvärdering av maskinstyrning Tommy Åbacka Examensarbete för ingenjörs (YH)-examen Utbildningsprogrammet för lantmäteriteknik Vasa 2011 EXAMENSARBETE Författare: Tommy Åbacka Utbildningsprogram och ort:
Användarhandbok för Nokia Trådlös GPS-modul LD-3W 9246490/1
 Användarhandbok för Nokia Trådlös GPS-modul LD-3W 9246490/1 KONFORMITETSDEKLARATION Vi, NOKIA CORPORATION, tillkännager under vårt ensamma ansvar att produkten LD-3W uppfyller villkoren i följande EUdirektiv:
Användarhandbok för Nokia Trådlös GPS-modul LD-3W 9246490/1 KONFORMITETSDEKLARATION Vi, NOKIA CORPORATION, tillkännager under vårt ensamma ansvar att produkten LD-3W uppfyller villkoren i följande EUdirektiv:
Installation CFX-750 EZ-Steer
 Installation CFX-750 EZ-Steer Manual ID Install-EZ-3x Rev dat. 2011-05-24 DataVäxt AB Tel: 0514-650200 www.datavaxt.se Hedåkers Säteri 3 Fax: 0514-650201 info@datavaxt.se 467 95 Grästorp 2 Installation
Installation CFX-750 EZ-Steer Manual ID Install-EZ-3x Rev dat. 2011-05-24 DataVäxt AB Tel: 0514-650200 www.datavaxt.se Hedåkers Säteri 3 Fax: 0514-650201 info@datavaxt.se 467 95 Grästorp 2 Installation
Realtidsuppdaterad fristation
 Precisionsanalys Januari 2009 Milan Horemuz Kungliga Tekniska högskolan, Institution för transporter och samhällsekonomi Avdelningen för Geodesi Teknikringen 72, SE 100 44 Stockholm e-post: horemuz@kth.se
Precisionsanalys Januari 2009 Milan Horemuz Kungliga Tekniska högskolan, Institution för transporter och samhällsekonomi Avdelningen för Geodesi Teknikringen 72, SE 100 44 Stockholm e-post: horemuz@kth.se
EXAMENSARBETE. Ventilationskarta, Björkdals underjordsgruva. Mattias Holmgren. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Ventilationskarta, Björkdals underjordsgruva Mattias Holmgren Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Ventilationskarta
EXAMENSARBETE Ventilationskarta, Björkdals underjordsgruva Mattias Holmgren Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Ventilationskarta
Utbildningsplan Bygg och anläggning för läsåret 2013/2014. Higher Education Diploma Programme in Works Management in Civil Engineering
 Utbildningsplan Bygg och anläggning för läsåret 2013/2014 Denna Higher Education Diploma Programme in Works Management in Civil Engineering Utbildningsplanen är reviderad 2012-11-07 av Chef utbildnings-
Utbildningsplan Bygg och anläggning för läsåret 2013/2014 Denna Higher Education Diploma Programme in Works Management in Civil Engineering Utbildningsplanen är reviderad 2012-11-07 av Chef utbildnings-
Extern industribullerutredning Åsbymon 2:39, Eskilstuna Bullerutredning i tillståndsansökan för deponi
 PM01 Handläggare Kaj Erik Piippo Telefon +46105056069 Mobil +46730277049 E-post kaj.piippo@afconsult.com Beställare Eskilstuna kommun KLK / Fastighet och exploatering 631 86 Eskilstuna Att: Joakim Persson
PM01 Handläggare Kaj Erik Piippo Telefon +46105056069 Mobil +46730277049 E-post kaj.piippo@afconsult.com Beställare Eskilstuna kommun KLK / Fastighet och exploatering 631 86 Eskilstuna Att: Joakim Persson
Dynapac Dokumentationssystem. Jordpackning
 Dynapac Dokumentationssystem Jordpackning Dynapac Dokumentationssystem Dynapacs erfarenhet av yttäckande packningskontroll sträcker sig tillbaka till sent 70-tal. Vi har sedan dess erbjudit våra kunder
Dynapac Dokumentationssystem Jordpackning Dynapac Dokumentationssystem Dynapacs erfarenhet av yttäckande packningskontroll sträcker sig tillbaka till sent 70-tal. Vi har sedan dess erbjudit våra kunder
NYHET : Mars 2011 Nya Stealth har 10Hz mottagare Stealth GPS-3X har USB för lättare överföring mellan dator och Laptimer
 Stealth GPS-3X 10Hz NYHET : Mars 2011 Nya Stealth har 10Hz mottagare Stealth GPS-3X har USB för lättare överföring mellan dator och Laptimer NYHET Nya Siliconknappar som gör det mycket lättare att använda
Stealth GPS-3X 10Hz NYHET : Mars 2011 Nya Stealth har 10Hz mottagare Stealth GPS-3X har USB för lättare överföring mellan dator och Laptimer NYHET Nya Siliconknappar som gör det mycket lättare att använda
Redskap. Volvo Kompaktgrävare Aggressive Cut-Skopor
 Redskap Volvo Kompaktgrävare Aggressive Cut-Skopor Perfekt passform. Vi introducerar det nya sortimentet kompaktgrävskopor från Volvo. Dessa hållbara redskap är utformade för att prestera i perfekt harmoni
Redskap Volvo Kompaktgrävare Aggressive Cut-Skopor Perfekt passform. Vi introducerar det nya sortimentet kompaktgrävskopor från Volvo. Dessa hållbara redskap är utformade för att prestera i perfekt harmoni
S T Y R A UPPGIFTERNA. Teknik åk 9, ht 18. Programmera i scratch, visa upp Delta vid programmeringsbesök på Kulla senare i höst
 S T Y R A Teknik åk 9, ht 18 v. 37 Programmering i scratch v. 38 Tyskgruppen gör detta på torsdagslektionen och franskgruppen gör detta på fransklektionerna den 25/9 och 2/10. 1. Fortsätt programmera i
S T Y R A Teknik åk 9, ht 18 v. 37 Programmering i scratch v. 38 Tyskgruppen gör detta på torsdagslektionen och franskgruppen gör detta på fransklektionerna den 25/9 och 2/10. 1. Fortsätt programmera i
LEICA MOJOMINI MANUAL FÄLTGUIDE. SKEPPSTA MASKIN AB Täby Skeppsta 336 705 94 Örebro. tfn: 019-228005 sales@oilpress.com
 Hemsida\LEICA MOJOMINI MANUAL FÄLTGUIDE SMAB.doc Sidan 1 av 21 LEICA MOJOMINI MANUAL FÄLTGUIDE SKEPPSTA MASKIN AB Täby Skeppsta 336 705 94 Örebro tfn: 019-228005 sales@oilpress.com Hemsida: http://www.gpsjordbruk.se
Hemsida\LEICA MOJOMINI MANUAL FÄLTGUIDE SMAB.doc Sidan 1 av 21 LEICA MOJOMINI MANUAL FÄLTGUIDE SKEPPSTA MASKIN AB Täby Skeppsta 336 705 94 Örebro tfn: 019-228005 sales@oilpress.com Hemsida: http://www.gpsjordbruk.se
Bredband för gör-det-självare. eller. Själv är bäste dräng. eller. Hur man själv kan skapa ett konkurrenskraftigt nätverk
 Bredband för gör-det-självare eller Själv är bäste dräng eller Hur man själv kan skapa ett konkurrenskraftigt nätverk Daniel Elvin och Sven Karlsson HSBs Brf Fagotten i Lund Vad har vi gjort? Vi ville
Bredband för gör-det-självare eller Själv är bäste dräng eller Hur man själv kan skapa ett konkurrenskraftigt nätverk Daniel Elvin och Sven Karlsson HSBs Brf Fagotten i Lund Vad har vi gjort? Vi ville
Kurs i hagastängning/gärdesgårdsbygge på Jamtli 8-9 okt Anna Hansen och Terese Olofsson
 Kurs i hagastängning/gärdesgårdsbygge på Jamtli 8-9 okt 2011 Anna Hansen och Terese Olofsson Kursen inleddes med att Jamtlis byggnadsantikvarie Olof Edin berättade lite kort historik kring gärdesgårdsbygge.
Kurs i hagastängning/gärdesgårdsbygge på Jamtli 8-9 okt 2011 Anna Hansen och Terese Olofsson Kursen inleddes med att Jamtlis byggnadsantikvarie Olof Edin berättade lite kort historik kring gärdesgårdsbygge.
0,22 m. 45 cm. 56 cm. 153 cm 115 cm. 204 cm. 52 cm. 38 cm. 93 cm 22 cm. 140 cm 93 cm. 325 cm

Lathund GeoROG maskinstyrning Grävare och Leica GPS
 Lathund GeoROG maskinstyrning Grävare och Leica GPS Huvudmenyn 8. Versionsinfo. Tryck på Linux-pingvinen för utförlig information om vilka versioner av operativsystemet och programvaran du har. Knappar
Lathund GeoROG maskinstyrning Grävare och Leica GPS Huvudmenyn 8. Versionsinfo. Tryck på Linux-pingvinen för utförlig information om vilka versioner av operativsystemet och programvaran du har. Knappar
DeLaval mixrar Kraftfulla, effektiva, robusta och pålitliga
 DeLaval mixrar Kraftfulla, effektiva, robusta och pålitliga Stationära mixrar bättre mixning, bättre foder En foderrådgivares rekommendationer kan ofta vara mycket detaljerade och exakta. Men med en stationär
DeLaval mixrar Kraftfulla, effektiva, robusta och pålitliga Stationära mixrar bättre mixning, bättre foder En foderrådgivares rekommendationer kan ofta vara mycket detaljerade och exakta. Men med en stationär
Användarhan dbok. Areaberäknare INNEHÅLLSFÖRTECKNING TOC. Handbok versionsnr. SV 2-1 Programvara versionsnr. 3.0 Kongskilde
 Användarhan dbok Areaberäknare Handbok versionsnr. SV 2-1 Programvara versionsnr. 3.0 Kongskilde INNEHÅLLSÖRTECKNING TOC 1. Översikt av areaberäkningsfunktion Areaberäknaren innehåller både en partiell
Användarhan dbok Areaberäknare Handbok versionsnr. SV 2-1 Programvara versionsnr. 3.0 Kongskilde INNEHÅLLSÖRTECKNING TOC 1. Översikt av areaberäkningsfunktion Areaberäknaren innehåller både en partiell