Enchipsdatorer med tillämpningar LABORATION 7, ROBOT
|
|
|
- Inga Fredriksson
- för 9 år sedan
- Visningar:
Transkript
1 Enchipsdatorer med tillämpningar LABORATION 7, ROBOT Laborationsansvariga: Anders Arvidsson Utskriftsdatum: Laboranter:

2 1 Syfte Denna laboration syftar till att introducera interrupt och watchdog i PIC-processorern. Även processorn PIC16F877 kommer att presenteras. (877:an ingår inte i tentan, men många delar gemensamma med 84:an). Efter laborationen förväntas studenten bl a kunna konfigurera interrupt för att åstadkomma en exakt timing. Förutom de nya momenten som nämnts ovan ska laborationen ge studenten möjlighet att ganska fritt öva olika moment. Försök därför välja en lösning där sådant du tycker är besvärligt och vill öva mer på ingår. På tentamen förväntas du kunna skriva små program för båda processorena och använda de flesta tekniker om gåtts igenom i kursen. Laborationen ger också möjlighet att t ex testa att använda EEPROM dataminne för att spela in ett rörelseschema (avancerad uppgift ). Till tentan förväntas studenten kunna använda samtliga delar av 84:an och 705:an m h a datablad vilka bifogas som hjälpmedel. Repetera gärna 705:an genom att t ex lägga till en funktion i en tidigare lab. Då detta är sista laborationen testas studentens förmåga att lösa ett praktiskt problem med enchipsdatorn. Förutom en del restriktioner får studenten fritt strukturera uppgiften och välja lösning. 2 Genomförande Hela laborationen utförs i MPLAB. Datablad mm finns på kursens hemsida. Laborationen är uppbyggd som en mindre projektuppgift där lösning kan väljas ganska fritt, förutsatt att vissa grundkriterier uppfylls. Det är ytterst lämpligt att åtminstone ha ritat schema för maskinvaran och flödesschema för programvaran före laborationstillfället. Kopplingen byggs på labdäck GL-24 eller de röda kopplingsdäcken. Till roboten ansluts endast logiksignalerna till servona (M1 M4) och jord. Roboten drivs med en egen transformator så +5V i kopplingsplinten på roboten är en utgång! Denna ska ej användas! Redovisning sker genom att laboranten visar upp resultatet för laborationsansvarig. Koderna sparas i filer med namnen lab7_namn1_namn2.705 respektive lab7_namn1_namn2.asm. Skriv även fullständiga namn i filerna. Filerna kopieras till laborationsansvariges diskett vid redovisning. Om laborationen inte godkänns senast veckan efter tentaveckan lämnar gruppen istället in en skriftlig rapport med koder och kommentarer enligt labrapportmall. Det ska även finnas text som beskriver uppgift och tankegång, samt ett schema som besktiver kopplingen. Koderna (med namn enligt ovan) ska även skickas till laborationsansvarig med e-post. 2

3 3 PIC16F :an innehåller allt som finns i F84an, men utöver det också en mängd andra periferienheter och register. Det man behöver tänka på när man lägger in kod och funktioner från 84:an i 877:n är främst att register och dataminne kan ligga på andra adresser. RAM är också fördelat på flera banker så bankbitarna måste vara rätt satta när man accessar en variabel. Dessutom måste A/Domvandlaren konfigureras även om PORTA ska användas som en digital port. 3.1 Databladet Plocka fram databladet för 877:an, antingen i pärmen eller på kursens hemsida. Skumma igenom första sidan så du får en grov uppfattning om processorn. Studera även blockschemat ca sex sidor längre bak. (Observera att det finns ett schema även för andra varianter.) Hur mycket programminne, dataminne och EEPROM har 877:an? Ögna igenom beskrivningen av pinnarna och bläddra vidare till Data Memory Orgaisation. Läs på om bankbitarna och studera sedan Register File Map. På vilken adress börjar dataminnet (GPR)? 3.2 Exempelprogram På kurshemsidan finns ett exempelprogram för 877an. Spara detta i en lämplig mapp och skapa ett nytt projekt i MPLAB. Testa att programmet går kompilera. Studera sedan beskrivningen längst upp i koden så du ser vad programmet gör. Kolla också igenom koden så du ser hur uppgiften är implementerad. Vad programmet har för praktisk funktion blir tydligare i nästa avsnitt. Tanken är att programmet ska vara så skrivet att du inte behöver kunna mycket om 877:an för att t ex kunna använda A/D-omvandlarrutinen i ett helt annat sammanhang. Vid programmering av chippet används nedanstående inställningar. 3

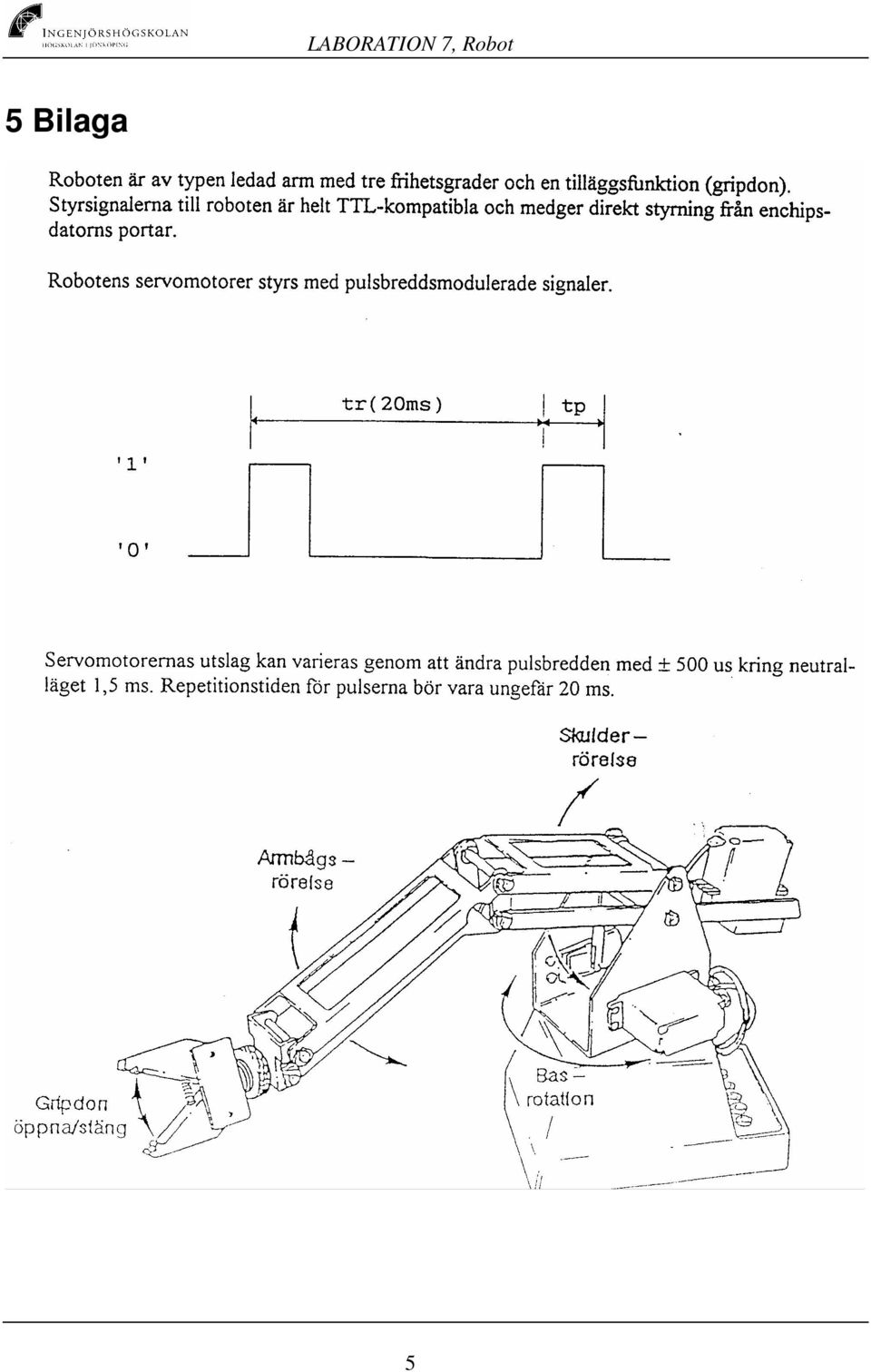
4 4 Robot LABORATION 7, Robot En robotarm ska styras med hjälp av pulser till ett servo. Pulserna ska genereras med 20 ms mellanrum och vara 1 2 ms långa. Se i bilagan hur detta påverkar respektive robotarms läge. En operatör ska med två joystickar kunna styra robotarmen till önskat läge och t ex kunna flytta ett mindre föremål mellan olika platser. (Varje joystick innehåller två potentiometrar.) 4.1 Konstruktionsbeskrivning Att skapa pulser med varierande varaktighet med jämna mellanrum kan vara ganska bevärligt i en processor med bara en timer. 84:an ska därför kompletteras med en 877:a som läser in och behandlar information om robotarmens position, samt genererar periodtiderna. Var 5:e ms skickar denna processor information om respektive robotarmens önskade läge till PIC-processorn, som genererar en puls till rätt servo med lämplig längd. Varje servo kommer alltså pulsas var 20:e ms Kriterier Användargränssnittet består av joystick, potentiometer eller knappar. PIC-processorn ska generera servopulsen (1-2 ms) i en interruptrutin som aktiveras av 877:an. PIC-processorn använder alltså extern pinne som interruptkälla. Watchdog (i PIC) ska vara aktiv och får inte resettas av interruptrutinen. Robotarmens läge ska kunna bestämmas med en upplösning av minst 80 steg. 877:an ska ges någon ny funktion jämfört med exempelprogrammet, t ex en lysdiod som visar när en A/D-ingång passerat ett visst värde, men testa gärna något mer. Tillägg och ändringar ska beskrivas i programkoden på avsedd plats Konstruktionstips Då 84:an har lite begränsat med I/O kan 7 bitar räcka för att föra över positionen från 877:an. Man kan även låta 877:an räkna om värdet före överföring till något som passar 84:ans timer. Tänk på att 877:an har dubbla Vdd/Vss. Avkoppla dessa med 100 nf och dubbelkolla att processorn inte sätts i ett steg fel! Blockera raderna i däcket ovan och under processorn så går den inte sätta fel. Glöm inte att konfigurera om TRIS-registren om du behöver några fler ingångar på 877:an. 4.2 Genomförande Bestäm vilka funktioner din robot ska ha och rita ett schema med de komponenter som kommer att krävas. Framförallt sammankopplingen av processorerna måste vara med. Rita ett flödesschema eller motsvarande för varje processor innan kodning sker. Efter simulering ska pulsen verifieras med oscilloskop innan robotarmen styrs, då servot som driver robotarmen kan ta skada av alltför felaktiga styrsignaler. Bygg programmen så att du kan testa så mycket som möjligt individuellt, annars blir avlusningen mycket besvärlig. En potentiometer kan anslutas som spänningsdelare i däcket för att testa A/D-omvandlingen innan joysticken ansluts. 84:an kan börja med att endast ta hand om kanal 0 och styra ett servo (var 20:e ms). 4

5 5 Bilaga 5
6 6

Enchipsdatorer med tillämpningar LABORATION 6, ROBOT
 Enchipsdatorer med tillämpningar LABORATION 6, ROBOT Laborationsansvariga: Tomas Bengtsson, Rickard Holsmark Utskriftsdatum: 2006-05-02 Laboranter: 1 Syfte Syftet med laborationen är att studenterna på
Enchipsdatorer med tillämpningar LABORATION 6, ROBOT Laborationsansvariga: Tomas Bengtsson, Rickard Holsmark Utskriftsdatum: 2006-05-02 Laboranter: 1 Syfte Syftet med laborationen är att studenterna på
Systemkonstruktion SERIEKOMMUNIKATION
 Systemkonstruktion SERIEKOMMUNIKATION Laborationsansvariga: Anders Arvidsson Utskriftsdatum: 2005-04-26 Syfte Laborationen syftar till att ge studenten tillfälle att närmare bekanta sig med RS-232-protokollet,
Systemkonstruktion SERIEKOMMUNIKATION Laborationsansvariga: Anders Arvidsson Utskriftsdatum: 2005-04-26 Syfte Laborationen syftar till att ge studenten tillfälle att närmare bekanta sig med RS-232-protokollet,
LABORATION PIC-PROGRAMMERARE
 Laborationsansvarig: Examinator: Anders Arvidsson Bengt Magnhagen Utskriftsdatum: 1998-02-13 Laborant: Godkänd den: / - Sign: Abstract This hands-on session aims at giving the student a useful PIC16x84
Laborationsansvarig: Examinator: Anders Arvidsson Bengt Magnhagen Utskriftsdatum: 1998-02-13 Laborant: Godkänd den: / - Sign: Abstract This hands-on session aims at giving the student a useful PIC16x84
PC-teknik, 5 p LABORATION ASSEMBLERINTRODUKTION
 PC-teknik, 5 p LABORATION ASSEMBLERINTRODUKTION Laborationsansvarig: Anders Arvidsson Utskriftsdatum: 2005-08-31 Laborant(er): 1 Syfte Laborationen ska ge studenten möjlighet att genom assemblerinlägg
PC-teknik, 5 p LABORATION ASSEMBLERINTRODUKTION Laborationsansvarig: Anders Arvidsson Utskriftsdatum: 2005-08-31 Laborant(er): 1 Syfte Laborationen ska ge studenten möjlighet att genom assemblerinlägg
Systemkonstruktion LABORATION REALTIDSPROGRAMMERING
 Systemkonstruktion LABORATION REALTIDSPROGRAMMERING Laborationsansvariga: Anders Arvidsson, Björn Lundblad Utskriftsdatum: 2002-10-31 Laboranter: 1 Syfte Denna laboration syftar till att öva användningen
Systemkonstruktion LABORATION REALTIDSPROGRAMMERING Laborationsansvariga: Anders Arvidsson, Björn Lundblad Utskriftsdatum: 2002-10-31 Laboranter: 1 Syfte Denna laboration syftar till att öva användningen
INGENJÖRSHÖGSKOLAN INGENJÖRSHÖGSKOLAN
 Dagens föreläsning Inbyggnadsprocessorer - och programmering ❾ Översikt PIC-processorn ❿ Familj ❿ Flash / EPROM ❿ Introduktion: 16F84 ❾ ❿ Harvard / von Neumann ❿ CISC / RISC ❿ Pipelining ❾ Programmering
Dagens föreläsning Inbyggnadsprocessorer - och programmering ❾ Översikt PIC-processorn ❿ Familj ❿ Flash / EPROM ❿ Introduktion: 16F84 ❾ ❿ Harvard / von Neumann ❿ CISC / RISC ❿ Pipelining ❾ Programmering
Föreläsningsanteckningar till Konstruktionsmetoder 981027
 Föreläsningsanteckningar till Konstruktionsmetoder 981027 Jämförelse mellan 68705P3 och 16F84 externt MC68705P3 PIC16F84 I/O 20 13 Kapsling 28-pin DIL 18-pin DIL Drivförmåga på pinnar PortB 10mA Sink,
Föreläsningsanteckningar till Konstruktionsmetoder 981027 Jämförelse mellan 68705P3 och 16F84 externt MC68705P3 PIC16F84 I/O 20 13 Kapsling 28-pin DIL 18-pin DIL Drivförmåga på pinnar PortB 10mA Sink,
Systemkonstruktion LABORATION LOGIK
 Systemkonstruktion LABORATION LOGIK Laborationsansvarig: Anders Arvidsson Utskriftsdatum: 2005-04-26 Syfte Denna laboration syftar till att visa några av logikkretsarnas analoga egenskaper. Genom att experimentera
Systemkonstruktion LABORATION LOGIK Laborationsansvarig: Anders Arvidsson Utskriftsdatum: 2005-04-26 Syfte Denna laboration syftar till att visa några av logikkretsarnas analoga egenskaper. Genom att experimentera
AVR 3 - datorteknik. Avbrott. Digitala system 15 hp. Förberedelser
 Namn: Laborationen godkänd: Digitala system 15 hp AVR 3 - datorteknik LTH Ingenjörshögskolan vid Campus Helsingborg Avbrott. Syften med den här laborationen är att introducera avbrott. Avbrott som uppkommer
Namn: Laborationen godkänd: Digitala system 15 hp AVR 3 - datorteknik LTH Ingenjörshögskolan vid Campus Helsingborg Avbrott. Syften med den här laborationen är att introducera avbrott. Avbrott som uppkommer
William Sandqvist william@kth.se
 Komparatorn en 1 bits AD-omvandlare En komparator är en känslig förstärkare för skillnaden mellan spänningarna på ingångarna. Minsta lilla positiv skillnad gör att utgången hamnar på (1) eller vid negativ
Komparatorn en 1 bits AD-omvandlare En komparator är en känslig förstärkare för skillnaden mellan spänningarna på ingångarna. Minsta lilla positiv skillnad gör att utgången hamnar på (1) eller vid negativ
'HOWHQWDPHQ 6\VWHPNRQVWUXNWLRQ
 'HOWHQWDPHQ 6\VWHPNRQVWUXNWLRQ / VQLQJDURFKNRPPHQWDUHU Program: Elektroteknik, mikrodatorsystem Datum: 99-11-02 Tid: 8:00-9:30 Lokal E448 Hjälpmedel: Bilagor: Examinator: Miniräknare, linjal Datablad för
'HOWHQWDPHQ 6\VWHPNRQVWUXNWLRQ / VQLQJDURFKNRPPHQWDUHU Program: Elektroteknik, mikrodatorsystem Datum: 99-11-02 Tid: 8:00-9:30 Lokal E448 Hjälpmedel: Bilagor: Examinator: Miniräknare, linjal Datablad för
Laborationshandledning
 Laborationshandledning Utbildning: ED Ämne: TNE094 Digitalteknik och konstruktion Laborationens nummer och titel: Nr 5 Del A: Schmittrigger Del B: Analys av sekvensnät Laborant: E-mail: Medlaboranters
Laborationshandledning Utbildning: ED Ämne: TNE094 Digitalteknik och konstruktion Laborationens nummer och titel: Nr 5 Del A: Schmittrigger Del B: Analys av sekvensnät Laborant: E-mail: Medlaboranters
Tentamen i Digitalteknik 5p
 Dan Weinehall Håkan Joëlson 007-0-09 ELEA5 Tentamen i Digitalteknik 5p Datum: 007-0-09 Tid: 09:00-5:00 Sal: Hjälpmedel: VHDL-kompendierna: Grunderna i VHDL, Strukturell VHDL och testbädd Labinstruktioner
Dan Weinehall Håkan Joëlson 007-0-09 ELEA5 Tentamen i Digitalteknik 5p Datum: 007-0-09 Tid: 09:00-5:00 Sal: Hjälpmedel: VHDL-kompendierna: Grunderna i VHDL, Strukturell VHDL och testbädd Labinstruktioner
Provmoment: Ladokkod: Tentamen ges för: Tentamen TE111B El3. Namn: Personnummer: Tentamensdatum: 20120410 Tid: 14:00-18:00.
 Mikrodatorteknik Provmoment: Ladokkod: Tentamen ges för: Tentamen TE111B El3 7,5 högskolepoäng Namn: Personnummer: Tentamensdatum: 20120410 Tid: 14:00-18:00 Hjälpmedel: Totalt antal poäng på tentamen:
Mikrodatorteknik Provmoment: Ladokkod: Tentamen ges för: Tentamen TE111B El3 7,5 högskolepoäng Namn: Personnummer: Tentamensdatum: 20120410 Tid: 14:00-18:00 Hjälpmedel: Totalt antal poäng på tentamen:
(2B1560, 6B2911) HT08
 HT08") Royal Institute of Technology, KTH, Kista School of Information and Communication Technology, ICT Department of Electronics, Computer and Software, ECS Digital Design, IE1204 (2B1560, 6B2911) HT08 OBS!
Royal Institute of Technology, KTH, Kista School of Information and Communication Technology, ICT Department of Electronics, Computer and Software, ECS Digital Design, IE1204 (2B1560, 6B2911) HT08 OBS!
Mekanisk solros, Digitala projekt(edi021) Kristoer Nordvall, Stefan Windfeldt, Inlämmnad: 4 december 2006
 Kristoer Nordvall, Stefan Windfeldt, Inlämmnad: 4 december 2006") Mekanisk solros, Digitala projekt(edi021) Kristoer Nordvall, d03kn@student.lth.se Stefan Windfeldt, d03sw@student.lth.se Inlämmnad: 4 december 2006 Innehåll 1 Problembeskrivning 3 2 Teknisk beskrivning
Mekanisk solros, Digitala projekt(edi021) Kristoer Nordvall, d03kn@student.lth.se Stefan Windfeldt, d03sw@student.lth.se Inlämmnad: 4 december 2006 Innehåll 1 Problembeskrivning 3 2 Teknisk beskrivning
Laborationshandledning för mätteknik
 Laborationshandledning för mätteknik - digitalteknik och konstruktion TNE094 LABORATION 2 Laborant: E-post: Kommentarer från lärare: Institutionen för Teknik och Naturvetenskap Campus Norrköping, augusti
Laborationshandledning för mätteknik - digitalteknik och konstruktion TNE094 LABORATION 2 Laborant: E-post: Kommentarer från lärare: Institutionen för Teknik och Naturvetenskap Campus Norrköping, augusti
Laborationshandledning
 Laborationshandledning Utbildning: ED Ämne: TNGE11 Digitalteknik Laborationens nummer och titel: Nr 5 Del A: Schmittrigger Del B: Analys av sekvensnät Laborant: E-mail: Medlaboranters namn: Handledarens
Laborationshandledning Utbildning: ED Ämne: TNGE11 Digitalteknik Laborationens nummer och titel: Nr 5 Del A: Schmittrigger Del B: Analys av sekvensnät Laborant: E-mail: Medlaboranters namn: Handledarens
DIGITAL ELEKTRONIK. Laboration DE3 VHDL 1. Namn... Personnummer... Epost-adress... Datum för inlämning...
 UMEÅ UNIVERSITET Tillämpad fysik och elektronik 2014 John Berge et al. DIGITAL ELEKTRONIK Laboration DE3 VHDL 1 Namn... Personnummer... Epost-adress... Datum för inlämning... Introduktion Syftet med denna
UMEÅ UNIVERSITET Tillämpad fysik och elektronik 2014 John Berge et al. DIGITAL ELEKTRONIK Laboration DE3 VHDL 1 Namn... Personnummer... Epost-adress... Datum för inlämning... Introduktion Syftet med denna
SKAPA DET FÖRSTA PROJEKTET I mikrobasic PRO for AVR
 SKAPA DET FÖRSTA PROJEKTET I mikrobasic PRO for AVR 2 Projekt mikrobasic PRO for AVR organiserar applikationer som projekt vilka består av en enda projektfil (med filändelsen.mbpav) och en eller flera
SKAPA DET FÖRSTA PROJEKTET I mikrobasic PRO for AVR 2 Projekt mikrobasic PRO for AVR organiserar applikationer som projekt vilka består av en enda projektfil (med filändelsen.mbpav) och en eller flera
OMRON. PLC till PLC kommunikation (CP1L-E) Ethernet. 22 april 2014 OMRON Corporation
 Ethernet. 22 april 2014 OMRON Corporation") Ethernet 22 april 2014 OMRON Corporation 2/16 Läs detta innan du bläddrar vidare OMRON Denna bok är avsedd som ett tillägg till de ursprungliga manualerna för Omrons produkter. Använd den som en hjälp
Ethernet 22 april 2014 OMRON Corporation 2/16 Läs detta innan du bläddrar vidare OMRON Denna bok är avsedd som ett tillägg till de ursprungliga manualerna för Omrons produkter. Använd den som en hjälp
Ansvarig lärare: Olof Andersson, Telefon 021-101314 (besöker skrivsalen)
") MÄLRLENS HÖGSKOL Institutionen för elektroteknik Tentamen Mikrodatorteknik T3760 atum 2005-10-28 Tid 08.30 12.30 nsvarig lärare: Olof ndersson, Telefon 021-101314 (besöker skrivsalen) Om du klarat samtliga
MÄLRLENS HÖGSKOL Institutionen för elektroteknik Tentamen Mikrodatorteknik T3760 atum 2005-10-28 Tid 08.30 12.30 nsvarig lärare: Olof ndersson, Telefon 021-101314 (besöker skrivsalen) Om du klarat samtliga
LABORATION. Datorteknik Y
 LABORATION Datorteknik Y Avbrottsprogrammering på Darma Version 4.03 Februari 2019 (OA, KP) Namn och personnummer Godkänd 1 1 Inledning Syftet med laborationen är först att ge övning i avbrottsprogrammering
LABORATION Datorteknik Y Avbrottsprogrammering på Darma Version 4.03 Februari 2019 (OA, KP) Namn och personnummer Godkänd 1 1 Inledning Syftet med laborationen är först att ge övning i avbrottsprogrammering
SKAPA DET FÖRSTA PROJEKTET I mikrobasic PRO for PIC
 SKAPA DET FÖRSTA PROJEKTET I mikrobasic PRO for PIC TILL VÅRA VÄRDEFULLA KUNDER Jag vill framföra mitt tack till er för att ni är intresserade av våra produkter och för att ni har förtroende för MikroElektronika.
SKAPA DET FÖRSTA PROJEKTET I mikrobasic PRO for PIC TILL VÅRA VÄRDEFULLA KUNDER Jag vill framföra mitt tack till er för att ni är intresserade av våra produkter och för att ni har förtroende för MikroElektronika.
Digitala projekt rapport
 Digitala projekt rapport Alexander Westrup, d04aw@student.lth.se Martin Sandgren, d04ms@student.lth.se 4 december 2007 Innehåll 1 Abstract 1 2 Inledning 1 3 Arbetsgång 1 4 Hårdvara 1 4.1 Processor...............................
Digitala projekt rapport Alexander Westrup, d04aw@student.lth.se Martin Sandgren, d04ms@student.lth.se 4 december 2007 Innehåll 1 Abstract 1 2 Inledning 1 3 Arbetsgång 1 4 Hårdvara 1 4.1 Processor...............................
Laborationshandledning för mätteknik
 Laborationshandledning för mätteknik - digitalteknik och konstruktion TNE094 LABORATION 1 Laborant: E-post: Kommentarer från lärare: Institutionen för Teknik och Naturvetenskap Campus Norrköping, augusti
Laborationshandledning för mätteknik - digitalteknik och konstruktion TNE094 LABORATION 1 Laborant: E-post: Kommentarer från lärare: Institutionen för Teknik och Naturvetenskap Campus Norrköping, augusti
Datakommunikation med IR-ljus.
 Datakommunikation med -ljus. I den här uppgiften skall du kommunicera med hjälp av infrarött () ljus. Du skall kunna sända tecken från tangentbordet samt ta emot tecken och visa dem på skärmen. Genom att
Datakommunikation med -ljus. I den här uppgiften skall du kommunicera med hjälp av infrarött () ljus. Du skall kunna sända tecken från tangentbordet samt ta emot tecken och visa dem på skärmen. Genom att
LABORATIONSINSTRUKTION
 Högskolan Dalarna Institutionen för Elektroteknik LABORATION LABORATIONSINSTRUKTION LOG/iC, PLD, kombinatorik, sekvensnät KURS Digitalteknik LAB NR 6 INNEHÅLL. Inledning 2. Prioritetskodare 3. Elektronisk
Högskolan Dalarna Institutionen för Elektroteknik LABORATION LABORATIONSINSTRUKTION LOG/iC, PLD, kombinatorik, sekvensnät KURS Digitalteknik LAB NR 6 INNEHÅLL. Inledning 2. Prioritetskodare 3. Elektronisk
LABORATIONSINSTRUKTION
 Högskolan Dalarna Elektroteknik LABORATION LABORATIONSINSTRUKTION PLC-styrning av ett minimalt parkeringsgarage KURS El- och styrteknik för tekniker ET 1015 INNEHÅLL LAB NR 4 Ver 1.0 1. Inledning 2. Laborationskortet
Högskolan Dalarna Elektroteknik LABORATION LABORATIONSINSTRUKTION PLC-styrning av ett minimalt parkeringsgarage KURS El- och styrteknik för tekniker ET 1015 INNEHÅLL LAB NR 4 Ver 1.0 1. Inledning 2. Laborationskortet
Datorprojekt, del 1. Digitala system 15 p
 Namn: Laborationen godkänd: Digitala system 15 p L T H I n g e n j ö r s h ö g s k o l a n v i d C a m p u s H e l s i n g b o r g Datorprojekt, del 1 Projektet består i att skapa en klocka där tiden visas
Namn: Laborationen godkänd: Digitala system 15 p L T H I n g e n j ö r s h ö g s k o l a n v i d C a m p u s H e l s i n g b o r g Datorprojekt, del 1 Projektet består i att skapa en klocka där tiden visas
Experiment med schmittrigger
 dlab00a Experiment med schmittrigger Namn Datum Handledarens sign. Varför denna laboration? Schmittriggern är en mycket användbar koppling inom såväl analog- som digitaltekniken. Ofta används den för att
dlab00a Experiment med schmittrigger Namn Datum Handledarens sign. Varför denna laboration? Schmittriggern är en mycket användbar koppling inom såväl analog- som digitaltekniken. Ofta används den för att
DIGITALTEKNIK I. Laboration DE1. Kombinatoriska nät och kretsar
 UMEÅ UNIVERSITET Tillämpad fysik och elektronik Digitalteknik Björne Lindberg/Håkan Joëlson John Berge 2013 DIGITALTEKNIK I Laboration DE1 Kombinatoriska nät och kretsar Namn... Personnummer... Epost-adress...
UMEÅ UNIVERSITET Tillämpad fysik och elektronik Digitalteknik Björne Lindberg/Håkan Joëlson John Berge 2013 DIGITALTEKNIK I Laboration DE1 Kombinatoriska nät och kretsar Namn... Personnummer... Epost-adress...
Tentamen den 21 oktober TEL102 Inledande elektronik och mätteknik. TEL108 Introduktion till EDI-programmet. Del 1
 Karlstads universitet / lektroteknik / TL108 / Tentamen 021021 / BHä & PRö 1 (1) Tentamen den 21 oktober 2002 TL102 Inledande elektronik och mätteknik TL108 Introduktion till DI-programmet Del 1 xaminator:
Karlstads universitet / lektroteknik / TL108 / Tentamen 021021 / BHä & PRö 1 (1) Tentamen den 21 oktober 2002 TL102 Inledande elektronik och mätteknik TL108 Introduktion till DI-programmet Del 1 xaminator:
Tentamen Enchipsdatorer med tillämpningar. Lösningar och kommentarer
 Tentamen Enchipsdatorer med tillämpningar Lösningar och kommentarer Program: Elektroteknik Datum: 04-01-09 Tid: 08:00-13:00 Lokal: E103 Hjälpmedel: Linjal, miniräknare, Datablad: MC60705 och PIC16F84 (Utdelas
Tentamen Enchipsdatorer med tillämpningar Lösningar och kommentarer Program: Elektroteknik Datum: 04-01-09 Tid: 08:00-13:00 Lokal: E103 Hjälpmedel: Linjal, miniräknare, Datablad: MC60705 och PIC16F84 (Utdelas
Elektro och Informationsteknik LTH. Laboration 6 A/D- och D/A-omvandling. Elektronik för D ETIA01
 Elektro och Informationsteknik LTH Laboration 6 A/D- och D/A-omvandling Elektronik för D ETIA01 Peter Hammarberg Anders J Johansson Lund April 2008 Mål Efter laborationen skall du ha studerat följande:
Elektro och Informationsteknik LTH Laboration 6 A/D- och D/A-omvandling Elektronik för D ETIA01 Peter Hammarberg Anders J Johansson Lund April 2008 Mål Efter laborationen skall du ha studerat följande:
Rapport Digitala Projekt EITF11 Grupp 4 Axel Sundberg, Jakob Wennerström Gille Handledare: Bertil Lindvall
 Sammanfattning I denna rapport behandlas ett projekt inom kursen Digitala Projekt, EITF11, vid Lunds Tekniska högskola. Syftet med projektet är att konstruera en enkel digital prototyp samt programmera
Sammanfattning I denna rapport behandlas ett projekt inom kursen Digitala Projekt, EITF11, vid Lunds Tekniska högskola. Syftet med projektet är att konstruera en enkel digital prototyp samt programmera
Q64AD, Q68ADV/ADI, analoga ingångsmoduler KI00105E
 1 Funktion och användningsområde Q64AD och Q68ADV/ADI omvandlar analoga ström- eller spänningssignaler till digitala värden. 2 Om Kom-igång dokumentet Detta Kom-igång-dokument skall ej ses som en fullständig
1 Funktion och användningsområde Q64AD och Q68ADV/ADI omvandlar analoga ström- eller spänningssignaler till digitala värden. 2 Om Kom-igång dokumentet Detta Kom-igång-dokument skall ej ses som en fullständig
Schemaunderlag för Programmering, grundkurs (TDDB18)
") Allmänt Schemaunderlag för Programmering, grundkurs (TDDB18) Under VT1 håller jag (Torbjörn) tre kurser. Detta gör att det inte är lätt att få till ett optimalt schema för er studenter (tyvärr). En variant
Allmänt Schemaunderlag för Programmering, grundkurs (TDDB18) Under VT1 håller jag (Torbjörn) tre kurser. Detta gör att det inte är lätt att få till ett optimalt schema för er studenter (tyvärr). En variant
HF0010. Introduktionskurs i datateknik 1,5 hp
 HF0010 Introduktionskurs i datateknik 1,5 hp Välkommna - till KTH, Haninge, Datateknik, kursen och till första steget mot att bli programmerare! Er lärare och kursansvarig: Nicklas Brandefelt, bfelt@kth.se
HF0010 Introduktionskurs i datateknik 1,5 hp Välkommna - till KTH, Haninge, Datateknik, kursen och till första steget mot att bli programmerare! Er lärare och kursansvarig: Nicklas Brandefelt, bfelt@kth.se
RemoteBud. Inlämnas: Patrik Johnsson, e01pjo Viktor Karlsson, e01vk
 RemoteBud Inlämnas: 2005-02-01 Patrik Johnsson, e01pjo Viktor Karlsson, e01vk Abstract Skulle du också vilja styra dina lampor och rulla ner dina persienner med hjälp av din TV-fjärrkontroll? Remotebud
RemoteBud Inlämnas: 2005-02-01 Patrik Johnsson, e01pjo Viktor Karlsson, e01vk Abstract Skulle du också vilja styra dina lampor och rulla ner dina persienner med hjälp av din TV-fjärrkontroll? Remotebud
Laborationshandledning
 Laborationshandledning Utbildning: ED Ämne: TNE094 Digitalteknik och konstruktion Laborationens nummer och titel: Nr 3 Kombinatoriska nät Laborant: E-mail: Medlaboranters namn: Handledarens namn: Kommentarer
Laborationshandledning Utbildning: ED Ämne: TNE094 Digitalteknik och konstruktion Laborationens nummer och titel: Nr 3 Kombinatoriska nät Laborant: E-mail: Medlaboranters namn: Handledarens namn: Kommentarer
A-del motsvarande KS1
 MÄLARDALENS HÖGSKOLA Institutionen för elektroteknik Tentamen Mikrodatorteknik CT3760 Datum 2005-10-28 Tid 08.30 12.30 Svar till A- och B-del A-del motsvarande KS1 Uppgift A1. Vad blir resultatet då instruktionen
MÄLARDALENS HÖGSKOLA Institutionen för elektroteknik Tentamen Mikrodatorteknik CT3760 Datum 2005-10-28 Tid 08.30 12.30 Svar till A- och B-del A-del motsvarande KS1 Uppgift A1. Vad blir resultatet då instruktionen
Teori Se din kursbok under avsnitt PID-reglering, Ziegler-Nichols metod och olinjära system (avsnitt 7.7 i Modern Reglerteknik av Bertil Thomas).
.") 03-10-14/TFE CJ, BT, BaE, SG Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet PID - NIVÅREGLERING AV TANK Målsättning Målet med denna laboration
03-10-14/TFE CJ, BT, BaE, SG Laboration i kurs Tillämpad reglerteknik Institutionen för tillämpad fysik och elektronik Umeå universitet PID - NIVÅREGLERING AV TANK Målsättning Målet med denna laboration
Office 365 Kompetens 2014 / MB
 Innehåll Inledning / Inställningar... 2 Inloggning...2 Koppling av mobiltelefonen / pekplatta till systemet...2 Tema...2 E-post... 2 E-post inställningar (signatur)...2 E-posthistorik samt sökning...3
Innehåll Inledning / Inställningar... 2 Inloggning...2 Koppling av mobiltelefonen / pekplatta till systemet...2 Tema...2 E-post... 2 E-post inställningar (signatur)...2 E-posthistorik samt sökning...3
TENTAMEN Datorteknik (DO2005) D1/E1/Mek1/Ö1
 D1/E1/Mek1/Ö1") Halmstad University School of Information Science, Computer and Electrical Engineering Tomas Nordström, CC-lab TENTAMEN Datorteknik (DO2005) D1/E1/Mek1/Ö1 Datum: 2012-05- 23 Tid och plats: 9:00 13:00 i
Halmstad University School of Information Science, Computer and Electrical Engineering Tomas Nordström, CC-lab TENTAMEN Datorteknik (DO2005) D1/E1/Mek1/Ö1 Datum: 2012-05- 23 Tid och plats: 9:00 13:00 i
Besvara de elektroniska frågorna (se kurshemsidan). Läs kapitel i kursbok
. Läs kapitel i kursbok") Namn: Laborationen godkänd: Laboration 2. Cacheminne Laborationens syfte I laborationen ska du bekanta dig med cacheminnen. Genom laborationen fås kunskap om hur cacheminnen är konstruerade och hur de
Namn: Laborationen godkänd: Laboration 2. Cacheminne Laborationens syfte I laborationen ska du bekanta dig med cacheminnen. Genom laborationen fås kunskap om hur cacheminnen är konstruerade och hur de
LABORATIONSINSTRUKTION
 Högskolan Dalarna Elektroteknik LABORATION LABORATIONSINSTRUKTION KURS ET1001 Styrteknik LAB NR PLC 5 INNEHÅLL 1. Inledning 2. Laborationskortet i styrteknik 3. Laborationsuppgifter NAMN KOMMENTARER PROGRAM/KURS
Högskolan Dalarna Elektroteknik LABORATION LABORATIONSINSTRUKTION KURS ET1001 Styrteknik LAB NR PLC 5 INNEHÅLL 1. Inledning 2. Laborationskortet i styrteknik 3. Laborationsuppgifter NAMN KOMMENTARER PROGRAM/KURS
Lunds Universitet LTH Ingenjörshögskolan IDa1, IEa1 Helsingborg. Laboration nr 4 i digitala system ht-15. Ett sekvensnät. grupp. namn.
 Lunds Universitet LTH Ingenjörshögskolan IDa1, IEa1 Helsingborg Laboration nr 4 i digitala system ht-15 Ett sekvensnät.. grupp.. namn. godkänd Laborationens syfte: att ge grundläggande kunskaper i att
Lunds Universitet LTH Ingenjörshögskolan IDa1, IEa1 Helsingborg Laboration nr 4 i digitala system ht-15 Ett sekvensnät.. grupp.. namn. godkänd Laborationens syfte: att ge grundläggande kunskaper i att
TENTAMEN. Datorteknik. D1/E1/Mek1/Ö Hjälpmedel: Häfte "ARM-instruktioner", A4-format, 17 sidor. Maxpoäng:
 TENTAMEN D1/E1/Mek1/Ö1 1400-1800 Hjälpmedel: Häfte "ARM-instruktioner", A4-format, 17 sidor Maxpoäng: Betyg 3 Betyg 4 Betyg 5 60p 24p 36p 48p Frågor under tentamen: Börje Delistrand tel. +46702986358 Bilaga
TENTAMEN D1/E1/Mek1/Ö1 1400-1800 Hjälpmedel: Häfte "ARM-instruktioner", A4-format, 17 sidor Maxpoäng: Betyg 3 Betyg 4 Betyg 5 60p 24p 36p 48p Frågor under tentamen: Börje Delistrand tel. +46702986358 Bilaga
Labrapport: Programmering i NXC Programmera LEGO Maindstorm med NXC
 KTH ICT Labrapport: Programmering i NXC Programmera LEGO Maindstorm med NXC Jonathan Kindfält 23/08-2012 E-post (kindfalt@kth.se) Introduktionskurs i datateknik II1310 Sammanfattning Denna rapport behandlar
KTH ICT Labrapport: Programmering i NXC Programmera LEGO Maindstorm med NXC Jonathan Kindfält 23/08-2012 E-post (kindfalt@kth.se) Introduktionskurs i datateknik II1310 Sammanfattning Denna rapport behandlar
Laboration D184. ELEKTRONIK Digitalteknik. Sekvensnät beskrivna med VHDL och realiserade med PLD
 UMEÅ UNIVERSITET Tillämpad fysik och elektronik Digitalteknik Lars Wållberg/Dan Weinehall/ Håkan Joëlson 2010-05-06 v 1.7 ELEKTRONIK Digitalteknik Laboration D184 Sekvensnät beskrivna med VHDL och realiserade
UMEÅ UNIVERSITET Tillämpad fysik och elektronik Digitalteknik Lars Wållberg/Dan Weinehall/ Håkan Joëlson 2010-05-06 v 1.7 ELEKTRONIK Digitalteknik Laboration D184 Sekvensnät beskrivna med VHDL och realiserade
D/A- och A/D-omvandlarmodul MOD687-31
 D/A- och A/D-omvandlarmodul MOD687-31 Allmänt Modulen är helt självförsörjande, det enda du behöver för att komma igång är en 9VAC väggtransformator som du kopplar till jacket J2. När du så småningom vill
D/A- och A/D-omvandlarmodul MOD687-31 Allmänt Modulen är helt självförsörjande, det enda du behöver för att komma igång är en 9VAC väggtransformator som du kopplar till jacket J2. När du så småningom vill
Objektorienterad Programmering (TDDC77)
") Objektorienterad Programmering (TDDC77) Föreläsning I: kursinfo, att programmera datorer, första programmet Ahmed Rezine IDA, Linköpings Universitet Hösttermin 2015 Outline Hemsida Organization Examination
Objektorienterad Programmering (TDDC77) Föreläsning I: kursinfo, att programmera datorer, första programmet Ahmed Rezine IDA, Linköpings Universitet Hösttermin 2015 Outline Hemsida Organization Examination
Tentamen PC-teknik 5 p Lösningar och kommentarer
 Tentamen PC-teknik 5 p Lösningar och kommentarer Program: Di2, Em3, Et3 Datum: 04-08-10 Tid: 13:30-18:30 Lokal E171 Hjälpmedel: Linjal, miniräknare, Instruktionsrepertoar för 8086 (utdelas), Lathund, Pacific
Tentamen PC-teknik 5 p Lösningar och kommentarer Program: Di2, Em3, Et3 Datum: 04-08-10 Tid: 13:30-18:30 Lokal E171 Hjälpmedel: Linjal, miniräknare, Instruktionsrepertoar för 8086 (utdelas), Lathund, Pacific
Laboration 4: Knappstuds Drivrutiner för att eliminera störningar.
 ATMega16 Laborationer av Kjell 2 Rev:5 Datum: 29.09.2010 Page 1 of 7 Laboration 4: Knappstuds Drivrutiner för att eliminera störningar. Inledning: Laborationskortet EasyAVR6 har bland annat tryckknappar
ATMega16 Laborationer av Kjell 2 Rev:5 Datum: 29.09.2010 Page 1 of 7 Laboration 4: Knappstuds Drivrutiner för att eliminera störningar. Inledning: Laborationskortet EasyAVR6 har bland annat tryckknappar
DIGITALTEKNIK. Laboration D164. Logiska funktioner med mikroprocessor Kombinatoriska funktioner med PIC16F84 Sekvensfunktioner med PIC16F84
 UMEÅ UNIVERSITET Tillämpad fysik och elektronik Digitalteknik Björne Lindberg Håkan Joëlson 2007-11-22 v 2.3 DIGITALTEKNIK Laboration D164 Logiska funktioner med mikroprocessor Kombinatoriska funktioner
UMEÅ UNIVERSITET Tillämpad fysik och elektronik Digitalteknik Björne Lindberg Håkan Joëlson 2007-11-22 v 2.3 DIGITALTEKNIK Laboration D164 Logiska funktioner med mikroprocessor Kombinatoriska funktioner
3-veckorskontroll i itslearning
 3-veckorskontroll i itslearning Funktionen fungerar inte i Internet Explorer, använd Firefox, Chrome eller Safari Detta är en funktion som är framtagen för att kunna effektivisera och underlätta arbetet
3-veckorskontroll i itslearning Funktionen fungerar inte i Internet Explorer, använd Firefox, Chrome eller Safari Detta är en funktion som är framtagen för att kunna effektivisera och underlätta arbetet
Design av inbyggda system
 Design av inbyggda system Innehåll Hårdvarunära design Erfarenhet värd att tänka på Avbrottsrutiner och huvudloopar hantering av gemensamma data Kopplingsschema hur och varför Designspecar bra / dåligt
Design av inbyggda system Innehåll Hårdvarunära design Erfarenhet värd att tänka på Avbrottsrutiner och huvudloopar hantering av gemensamma data Kopplingsschema hur och varför Designspecar bra / dåligt
Realtidsprogrammering. En introduktion Implementering (med exempel från PIC)
") Realtidsprogrammering En introduktion Implementering (med exempel från PIC) Utan timing Periodtid varierar beroende på funktionernas exekveringstid. Specificera endast maxtid ( Worst case) och eventuellt
Realtidsprogrammering En introduktion Implementering (med exempel från PIC) Utan timing Periodtid varierar beroende på funktionernas exekveringstid. Specificera endast maxtid ( Worst case) och eventuellt
Att läsa en manual. Exempel Timern ECT_16B8C. Läs den allmänna beskrivningen (Overview) Vi ser att grundfunktionen är en räknare med prescaler
 Vi ser att grundfunktionen är en räknare med prescaler") Att läsa en manual Exempel Timern ECT_16B8C Läs den allmänna beskrivningen (Overview) Vi ser att grundfunktionen är en räknare med prescaler 1 Läs om speciella egenskaper (Features) I övrigt har vi Input
Att läsa en manual Exempel Timern ECT_16B8C Läs den allmänna beskrivningen (Overview) Vi ser att grundfunktionen är en räknare med prescaler 1 Läs om speciella egenskaper (Features) I övrigt har vi Input
Du har följande material: 1 Kopplingsdäck 2 LM339 4 komparatorer i vardera kapsel. ( ELFA art.nr datablad finns )
") Projektuppgift Digital elektronik CEL08 Syfte: Det här lilla projektet har som syfte att visa hur man kan konverterar en analog signal till en digital. Här visas endast en metod, flash-omvandlare. Uppgift:
Projektuppgift Digital elektronik CEL08 Syfte: Det här lilla projektet har som syfte att visa hur man kan konverterar en analog signal till en digital. Här visas endast en metod, flash-omvandlare. Uppgift:
Innehåll i detta dokument
 Läs igenom hela dokumentet innan du startar. Kopiera över allt på CD-skivan till din hårddisk. Din dator kommer behöva startas om en gång vid installationen av CodeSys. Du måste ha rättigheter att installera
Läs igenom hela dokumentet innan du startar. Kopiera över allt på CD-skivan till din hårddisk. Din dator kommer behöva startas om en gång vid installationen av CodeSys. Du måste ha rättigheter att installera
Office 365 MB. Innehåll. Inledning / Inställningar... 2. Outlook (e-post)... 2. Kalender... 3. Personer (kontakter)... 5 OneDrive molnet... 5.
... 2. Kalender... 3. Personer (kontakter)... 5 OneDrive molnet... 5.") Innehåll Inledning / Inställningar... 2 Inloggning...2 Koppling av mobiltelefonen / pekplatta till systemet...2 Ladda Office 365 till egen dator...2 Tema...2 Outlook (e-post)... 2 E-post inställningar...2
Innehåll Inledning / Inställningar... 2 Inloggning...2 Koppling av mobiltelefonen / pekplatta till systemet...2 Ladda Office 365 till egen dator...2 Tema...2 Outlook (e-post)... 2 E-post inställningar...2
Snake. Digitala Projekt (EITF11) Fredrik Jansson, I-12 Lunds Tekniska Högskola,
 Fredrik Jansson, I-12 Lunds Tekniska Högskola,") Snake Digitala Projekt (EITF11) Fredrik Jansson, I-12 Lunds Tekniska Högskola, 2015-05-18 Oskar Petersen, I-12 Handledare: Bertil Lindvall Abstract Denna rapport beskriver ett projekt där ett klassiskt
Snake Digitala Projekt (EITF11) Fredrik Jansson, I-12 Lunds Tekniska Högskola, 2015-05-18 Oskar Petersen, I-12 Handledare: Bertil Lindvall Abstract Denna rapport beskriver ett projekt där ett klassiskt
Systemkonstruktion LABORATION SWITCHAGGREGAT. Utskriftsdatum:
 Systemkonstruktion LABORATION SWITCHAGGREGAT Laborationsansvariga: Anders Arvidsson Utskriftsdatum: 2005-04-26 Syfte Denna laboration syftar till att bekanta sig med en typ av switchaggregat, boost-regulatorn.
Systemkonstruktion LABORATION SWITCHAGGREGAT Laborationsansvariga: Anders Arvidsson Utskriftsdatum: 2005-04-26 Syfte Denna laboration syftar till att bekanta sig med en typ av switchaggregat, boost-regulatorn.
Digitalteknik: CoolRunner-II CPLD Starter Kit Med kommentarer för kursen ht 2012
 Med kommentarer för kursen ht 2012 2012 CR:1 CoolRunner-II CPLD Starter Kit är ett litet utvecklingssystem för Xilinx-kretsen XC2C256. Utvecklingskortet kommer från företaget Digilent. Vid laborationerna
Med kommentarer för kursen ht 2012 2012 CR:1 CoolRunner-II CPLD Starter Kit är ett litet utvecklingssystem för Xilinx-kretsen XC2C256. Utvecklingskortet kommer från företaget Digilent. Vid laborationerna
4 Laboration 4. Brus och termo-emk
 4 Laboration 4. Brus och termoemk 4.1 Laborationens syfte Detektera signaler i brus: Detektera periodisk (sinusformad) signal med hjälp av medelvärdesbildning. Detektera transient (nästan i alla fall)
4 Laboration 4. Brus och termoemk 4.1 Laborationens syfte Detektera signaler i brus: Detektera periodisk (sinusformad) signal med hjälp av medelvärdesbildning. Detektera transient (nästan i alla fall)
Automation Laboration: Överföring över PROFIBUS
 Automation Laboration: Överföring över PROFIBUS Inledning Sedan slutet av 80-talet har kommunikationssystemet PROFIBUS utvecklats och ökat i användning inom industrin. PROFIBUS utgör ett exempel på ett
Automation Laboration: Överföring över PROFIBUS Inledning Sedan slutet av 80-talet har kommunikationssystemet PROFIBUS utvecklats och ökat i användning inom industrin. PROFIBUS utgör ett exempel på ett
DIGITALTEKNIK I. Laboration DE2. Sekvensnät och sekvenskretsar
 UMEÅ UNIVERSITET Tillämpad fysik och elektronik Digitalteknik Håkan Joëlson, John Berge 203 DIGITALTEKNIK I Laboration DE2 Sekvensnät och sekvenskretsar Namn... Personnummer... Epost-adress... Datum för
UMEÅ UNIVERSITET Tillämpad fysik och elektronik Digitalteknik Håkan Joëlson, John Berge 203 DIGITALTEKNIK I Laboration DE2 Sekvensnät och sekvenskretsar Namn... Personnummer... Epost-adress... Datum för
Temperaturmätare med lagringsfunktion DIGITALA PROJEKT EITF11 GRUPP 14, ERIK ENFORS, LUDWIG ROSENDAL, CARL MIKAEL WIDMAN
 2016 Temperaturmätare med lagringsfunktion DIGITALA PROJEKT EITF11 GRUPP 14, ERIK ENFORS, LUDWIG ROSENDAL, CARL MIKAEL WIDMAN Innehållsförteckning INLEDNING... 3 KRAVSPECIFIKATION AV PROTOTYP... 3 FUNKTIONELLA
2016 Temperaturmätare med lagringsfunktion DIGITALA PROJEKT EITF11 GRUPP 14, ERIK ENFORS, LUDWIG ROSENDAL, CARL MIKAEL WIDMAN Innehållsförteckning INLEDNING... 3 KRAVSPECIFIKATION AV PROTOTYP... 3 FUNKTIONELLA
PIC-projekt: Kodlås till dörr
 Institutionen för industriell IT IT-universitetet Kista PIC-projekt: Kodlås till dörr Lars Viebke M3Mb l.viebke@telia.com Kurs: Maskinnära programmering 6B3285, PRO1 2p Lärare: William Sandquist Datum:
Institutionen för industriell IT IT-universitetet Kista PIC-projekt: Kodlås till dörr Lars Viebke M3Mb l.viebke@telia.com Kurs: Maskinnära programmering 6B3285, PRO1 2p Lärare: William Sandquist Datum:
TDDC30 Programmering i Java, Datastrukturer och Algoritmer Lektion 5. Laboration 4 Lådplanering Exempel på grafik, ett avancerat program Frågor
 TDDC30 Programmering i Java, Datastrukturer och Algoritmer Lektion 5 Laboration 4 Lådplanering Exempel på grafik, ett avancerat program Frågor 1 Laboration 4 - Introduktion Syfte: Öva på självständig problemlösning
TDDC30 Programmering i Java, Datastrukturer och Algoritmer Lektion 5 Laboration 4 Lådplanering Exempel på grafik, ett avancerat program Frågor 1 Laboration 4 - Introduktion Syfte: Öva på självständig problemlösning
Design av inbyggda system
 Design av inbyggda system Innehåll Hårdvarunära design Erfarenhet/Utmaningar värda att tänka på Avbrottsrutiner och huvudloopar hantering av gemensamma data Kopplingsschema hur och varför Designspecar
Design av inbyggda system Innehåll Hårdvarunära design Erfarenhet/Utmaningar värda att tänka på Avbrottsrutiner och huvudloopar hantering av gemensamma data Kopplingsschema hur och varför Designspecar
Laboration 1: Styrning av lysdioder med en spänning
 TSTE20 Elektronik Laboration 1: Styrning av lysdioder med en spänning v0.3 Kent Palmkvist, ISY, LiU Laboranter Namn Personnummer Godkänd Översikt I denna labroation ska en enkel Analog till Digital (A/D)
TSTE20 Elektronik Laboration 1: Styrning av lysdioder med en spänning v0.3 Kent Palmkvist, ISY, LiU Laboranter Namn Personnummer Godkänd Översikt I denna labroation ska en enkel Analog till Digital (A/D)
Datorteknik TSIU02 Kursinformation
 Datorteknik TSIU02 Kursinformation Michael Josefsson 24 maj 2018 1.1 Allmänt Kursen handlar om praktisk datorteknik på en grundläggande nivå. Programmerar man på en ännu lägre nivå är man processorkonstruktör!
Datorteknik TSIU02 Kursinformation Michael Josefsson 24 maj 2018 1.1 Allmänt Kursen handlar om praktisk datorteknik på en grundläggande nivå. Programmerar man på en ännu lägre nivå är man processorkonstruktör!
Anders Arvidsson 2005-04-26 ROBOTBESKRIVNING. Roboten på bilden är extrautrustad
 Anders Arvidsson 2005-04-26 ROBOTBESKRIVNING Roboten på bilden är extrautrustad Abstract This document describes the robot which is used in the third years applied courses at Ingenjörshögskolan i Jönköping.
Anders Arvidsson 2005-04-26 ROBOTBESKRIVNING Roboten på bilden är extrautrustad Abstract This document describes the robot which is used in the third years applied courses at Ingenjörshögskolan i Jönköping.
Ellära. Laboration 2 Mätning och simulering av likströmsnät (Thevenin-ekvivalent)
") Ellära. Laboration 2 Mätning och simulering av likströmsnät (Thevenin-ekvivalent) Labhäftet underskrivet av läraren gäller som kvitto för labben. Varje laborant måste ha ett eget labhäfte med ifyllda förberedelseuppgifter
Ellära. Laboration 2 Mätning och simulering av likströmsnät (Thevenin-ekvivalent) Labhäftet underskrivet av läraren gäller som kvitto för labben. Varje laborant måste ha ett eget labhäfte med ifyllda förberedelseuppgifter
Högskolan i Halmstad Digital- och Mikrodatorteknik 7.5p. Lista på registeruppsättningen i PIC16F877A Datablad TTL-kretsar 74-serien
 DIGITAL- OCH MIKRODATORTEKNIK, U2 09.00 13.00 Tillåtna hjälpmedel: Instruktionslista PIC16F877A Lista på registeruppsättningen i PIC16F877A Datablad TTL-kretsar 74-serien Fullständiga lösningar skall inlämnas.
DIGITAL- OCH MIKRODATORTEKNIK, U2 09.00 13.00 Tillåtna hjälpmedel: Instruktionslista PIC16F877A Lista på registeruppsättningen i PIC16F877A Datablad TTL-kretsar 74-serien Fullständiga lösningar skall inlämnas.
Applikationsexempel Timer med tryckknapp
 Applikationsexempel Timer med tryckknapp Document title Document Identity 4655_024_01 Valid for IMSE WebMaster Pro Firmare version 1.09 or higher Date 08-04-14 Webpages version 1.09 or higher Abelko Innovation
Applikationsexempel Timer med tryckknapp Document title Document Identity 4655_024_01 Valid for IMSE WebMaster Pro Firmare version 1.09 or higher Date 08-04-14 Webpages version 1.09 or higher Abelko Innovation
Processprogrammering och operativsystem Introduktion. Kursinformation. Varför operativsystem?
 Processprogrammering och operativsystem Introduktion Kursinformation. Varför operativsystem? Resurser Kurshemsidan http://www.ida.liu.se/~tdiu16/ Litteratur Operating system concepts (dinosaur book) by
Processprogrammering och operativsystem Introduktion Kursinformation. Varför operativsystem? Resurser Kurshemsidan http://www.ida.liu.se/~tdiu16/ Litteratur Operating system concepts (dinosaur book) by
Kursplanering för Mikrodatorteknik 4p/5p
 Kursplanering för Mikrodatorteknik 4p/5p Kursansvarig: Benny Thörnberg Tel: 060-148917 E-post: benny.thornberg@miun.se Kurslitteratur: Rune Körnefors, Mikrodatorer bit för bit, ISBN 91-44-30862-0 Introduktion
Kursplanering för Mikrodatorteknik 4p/5p Kursansvarig: Benny Thörnberg Tel: 060-148917 E-post: benny.thornberg@miun.se Kurslitteratur: Rune Körnefors, Mikrodatorer bit för bit, ISBN 91-44-30862-0 Introduktion
Datorteknik. Den digitala automaten. En dator måste kunna räkna! Register och bussanslutning
 Den digitala automaten Vägen från digitaltekniken till det kompletta styrsystemet Lund University, Sweden Insignaler Sekvensnät Utsignaler Kan vi betrakta insignalmönstret som en instruktion och det som
Den digitala automaten Vägen från digitaltekniken till det kompletta styrsystemet Lund University, Sweden Insignaler Sekvensnät Utsignaler Kan vi betrakta insignalmönstret som en instruktion och det som
Projektlaboration 4, synkronisering av klockan
 Namn: Laborationen godkänd: Digitala system 15 p L T H I n g e n j ö r s h ö g s k o l a n v i d C a m p u s H e l s i n g b o r g Datorprojekt, del 4 Projektlaboration 4, synkronisering av klockan Asynkron
Namn: Laborationen godkänd: Digitala system 15 p L T H I n g e n j ö r s h ö g s k o l a n v i d C a m p u s H e l s i n g b o r g Datorprojekt, del 4 Projektlaboration 4, synkronisering av klockan Asynkron
Studentmanual. 2013-08-09 (Bb Learn 9.1.13) iktsupport@oru.se
 iktsupport@oru.se") Studentmanual Inledning... 1 Krav på dator och rekommenderade webbläsare... 1 Support och stöd... 1 Översikt... 1 Logga in i Blackboard... 1 Navigeringsmenyn... 2 Fliken Min Blackboard... 2 Struktur inne
Studentmanual Inledning... 1 Krav på dator och rekommenderade webbläsare... 1 Support och stöd... 1 Översikt... 1 Logga in i Blackboard... 1 Navigeringsmenyn... 2 Fliken Min Blackboard... 2 Struktur inne
LABORATIONER I STYRTEKNIK. Grundläggande PLC- programmering
 1 LABORATIONER I STYRTEKNIK LABORATION : Grundläggande PLC- programmering 2 Övning 1. Rita ur reläschemat nedan ett ladderschema i GX IEC Developer. Kör programmet och prova funktionen med hjälp av ingångssimulatorn.
1 LABORATIONER I STYRTEKNIK LABORATION : Grundläggande PLC- programmering 2 Övning 1. Rita ur reläschemat nedan ett ladderschema i GX IEC Developer. Kör programmet och prova funktionen med hjälp av ingångssimulatorn.
Design vid utveckling av inbyggda system
 Design vid utveckling av inbyggda system Föreläsning i KMM, 2013-10-11 Innehåll Hårdvarunära design Avbrottsrutiner och huvudloopar Kopplingsschema Designspec Dagens föreläsning Hårdvarunära design - värt
Design vid utveckling av inbyggda system Föreläsning i KMM, 2013-10-11 Innehåll Hårdvarunära design Avbrottsrutiner och huvudloopar Kopplingsschema Designspec Dagens föreläsning Hårdvarunära design - värt
PNSPO! Tips! CP1W-AD och DA. 14 mars 2012 OMRON Corporation
 PNSPO! Tips! CP1W-AD och DA 14 mars 2012 OMRON Corporation 2/28 Läs detta innan du bläddrar vidare PNSPO! Denna bok är avsedd som ett tillägg till de ursprungliga manualerna för OMRONs produkter. Använd
PNSPO! Tips! CP1W-AD och DA 14 mars 2012 OMRON Corporation 2/28 Läs detta innan du bläddrar vidare PNSPO! Denna bok är avsedd som ett tillägg till de ursprungliga manualerna för OMRONs produkter. Använd
Verktygen i Fronter, för lärare
 Verktygen i Fronter, för lärare Denna manual beskriver hur man använder verktygen i Fronter och skapar innehållet, t ex nyheter, mappar och forum. Rev 2014-07-07 1 Innehållsförteckning Hitta mitt kursrum...
Verktygen i Fronter, för lärare Denna manual beskriver hur man använder verktygen i Fronter och skapar innehållet, t ex nyheter, mappar och forum. Rev 2014-07-07 1 Innehållsförteckning Hitta mitt kursrum...
Rullningslisten. Klicka på rullningslistpilar (pil upp eller pil ner) 1 för att förflytta dig i önskad riktning, en liten bit i taget.
 1 för att förflytta dig i önskad riktning, en liten bit i taget.") Rullningslisten Om informationen i fönstret inte ryms på skärmen skapas automatiskt en rullningslist i fönstrets högra kant. Med rullningslisterna kan du snabbt och enkelt flytta dig i fönstret 1 Klicka
Rullningslisten Om informationen i fönstret inte ryms på skärmen skapas automatiskt en rullningslist i fönstrets högra kant. Med rullningslisterna kan du snabbt och enkelt flytta dig i fönstret 1 Klicka
Datorteknik. Den digitala automaten. En dator måste kunna räkna! Register och bussanslutning
 Den digitala automaten Vägen från digitaltekniken till det kompletta styrsystemet Lund University, Sweden Insignaler Sekvensnät Utsignaler Kan vi betrakta insignalmönstret som en instruktion och det som
Den digitala automaten Vägen från digitaltekniken till det kompletta styrsystemet Lund University, Sweden Insignaler Sekvensnät Utsignaler Kan vi betrakta insignalmönstret som en instruktion och det som
Datorsystemteknik DAV A14 Föreläsning 1
 Innehåll Datorsystemteknik DAV A14 Föreläsning 1 Kursinformation Introduktion till datorsystem Programmeringsmodellen Större delen av materialet framtaget av :Jan Eric Larsson, Mats Brorsson och Mirec
Innehåll Datorsystemteknik DAV A14 Föreläsning 1 Kursinformation Introduktion till datorsystem Programmeringsmodellen Större delen av materialet framtaget av :Jan Eric Larsson, Mats Brorsson och Mirec
LABORATION. Datorteknik Y
 LABORATION Datorteknik Y Avbrottsprogrammering på Darma Version 4.02 Februari 2018 (OA, KP) Namn och personnummer Godkänd 1 1 Inledning Syftet med laborationen är först att ge övning i avbrottsprogrammering
LABORATION Datorteknik Y Avbrottsprogrammering på Darma Version 4.02 Februari 2018 (OA, KP) Namn och personnummer Godkänd 1 1 Inledning Syftet med laborationen är först att ge övning i avbrottsprogrammering
Programmering av NXT Lego- robot Labbrapport för programmering av en Lego- robot
 KUNGLIGA TEKNISKA HÖGSKOLAN Programmering av NXT Lego- robot Labbrapport för programmering av en Lego- robot Josef Karlsson Malik 2015-09- 02 jkmalik@kth.se Introduktionskurs i datateknik (II0310) Sammanfattning
KUNGLIGA TEKNISKA HÖGSKOLAN Programmering av NXT Lego- robot Labbrapport för programmering av en Lego- robot Josef Karlsson Malik 2015-09- 02 jkmalik@kth.se Introduktionskurs i datateknik (II0310) Sammanfattning
Innehållsförteckning. Figur- och tabellförteckning. Figure 1 Blockschema över hårdvaran...4 Figure 2 Blockschema över programet...
 Abstract Syftet var att konstruera en väder station som håller koll på temperaturen. Huvudfunktionen var att få en grafisk visning av temperaturen över ett visst tidsintervall eftersom vi valde den grafiska
Abstract Syftet var att konstruera en väder station som håller koll på temperaturen. Huvudfunktionen var att få en grafisk visning av temperaturen över ett visst tidsintervall eftersom vi valde den grafiska
PROJEKT LJUD. KOPIERINGSUNDERLAG Martin Blom Skavnes, Staffan Melin och Natur & Kultur Programmera i teknik ISBN
 PROJEKT LJUD PROJEKT LJUD s 1 I det här projektet ska du koppla en krets som innehåller en högtalare och skriva ett program som får högtalaren att spela toner och melodier. Materiel Arduino dator kopplingsdäck
PROJEKT LJUD PROJEKT LJUD s 1 I det här projektet ska du koppla en krets som innehåller en högtalare och skriva ett program som får högtalaren att spela toner och melodier. Materiel Arduino dator kopplingsdäck
Introduktion till E-block och Flowcode
 Introduktion till E-block och Flowcode Vad är E-blocks? E-blocks är små kretskort som innehåller block av elektronik som man vanligtvis kan hitta elektroniska eller inbyggda system Det finns över 50 olika
Introduktion till E-block och Flowcode Vad är E-blocks? E-blocks är små kretskort som innehåller block av elektronik som man vanligtvis kan hitta elektroniska eller inbyggda system Det finns över 50 olika
Sammanfattning av hantering av redovisning av uppgift U1
 Sammanfattning av hantering av redovisning av uppgift U1 Hur du redovisar Hur svar ges Hur eventuell komplettering sker Hur restuppgifter hanteras Hur registrering av resultat görs 1M321 Webbteknik 1,
Sammanfattning av hantering av redovisning av uppgift U1 Hur du redovisar Hur svar ges Hur eventuell komplettering sker Hur restuppgifter hanteras Hur registrering av resultat görs 1M321 Webbteknik 1,
Datorteknik 1 (AVR 1)
") Namn: Laborationen godkänd: Digitala system 15 hp Datorteknik 1 (AVR 1) LTH Ingenjörshögskolan vid Campus Helsingborg Introduktion till datorteknikutrustningen. Laborationens syfte. Syftet med laborationen
Namn: Laborationen godkänd: Digitala system 15 hp Datorteknik 1 (AVR 1) LTH Ingenjörshögskolan vid Campus Helsingborg Introduktion till datorteknikutrustningen. Laborationens syfte. Syftet med laborationen
Robotfotboll med Arduino
 Robotfotboll med Arduino Av Staffan Melin och Martin Blom Bild & form-skolan, Masthugget, Göteborg 2015 Staffan Melin, staffan.melin@oscillator.se Martin Blom, martinblomblom@hotmail.com Detta verk är
Robotfotboll med Arduino Av Staffan Melin och Martin Blom Bild & form-skolan, Masthugget, Göteborg 2015 Staffan Melin, staffan.melin@oscillator.se Martin Blom, martinblomblom@hotmail.com Detta verk är
Inlämningsverktyget i Fronter för lärare
 Inlämningsverktyget i Fronter för lärare I inlämningsverktyget kan du enkelt se vem som lämnat in ett arbete, när och vad studenterna har lämnat in. Kursdeltagarna kan få påminnelser om sista inlämningsdag.
Inlämningsverktyget i Fronter för lärare I inlämningsverktyget kan du enkelt se vem som lämnat in ett arbete, när och vad studenterna har lämnat in. Kursdeltagarna kan få påminnelser om sista inlämningsdag.