WALL E. WALL EVADER EDI021 DIGITALA PROJEKT
|
|
|
- Sara Magnusson
- för 5 år sedan
- Visningar:
Transkript
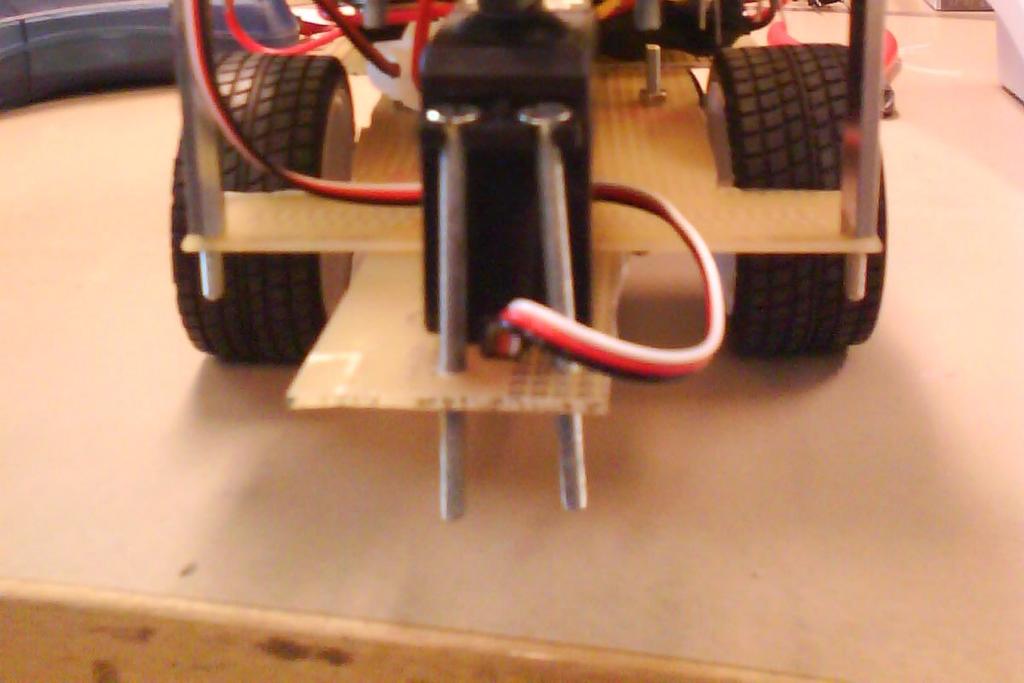
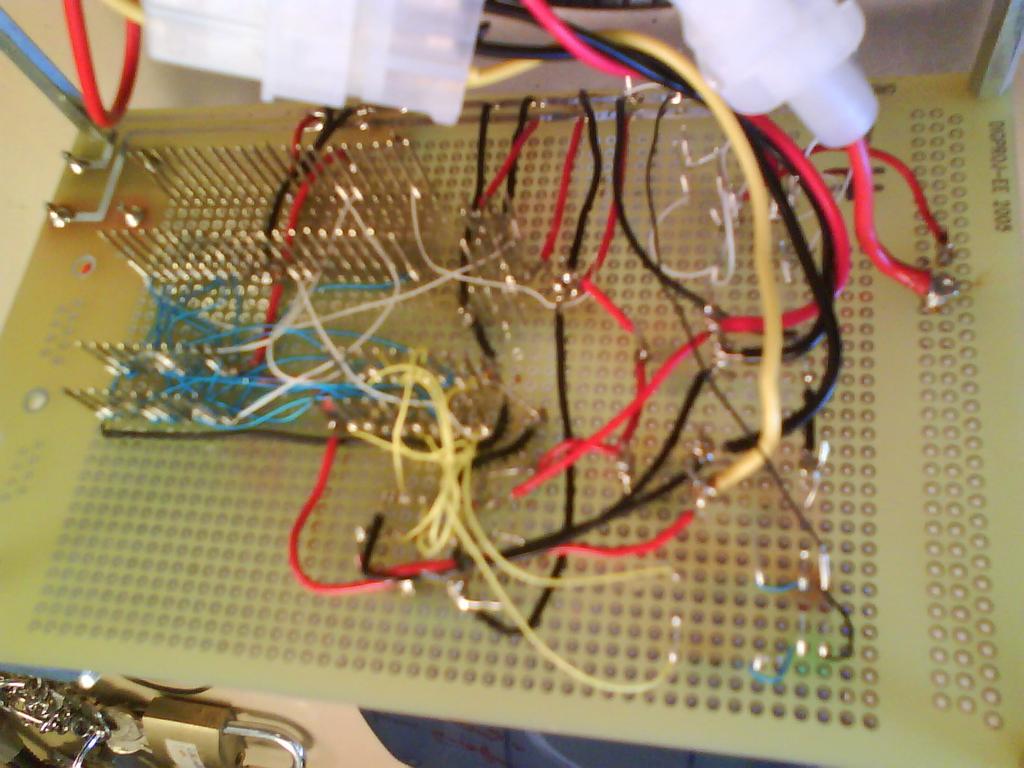
1 2009 Av: Aron Lidé dt05al1 Marie Li Korse dt05ml9 Handledare: Bertil Lindvall WALL E. WALL EVADER EDI021 DIGITALA PROJEKT Sammanfattning Den här rapporten behandlar konstruktionen av en självgående robot som klarar av att undvika objekt framför den, samt därefter välja att fortsätta höger eller vänster beroende på vilken väg som är mest lämplig. Konstruktionen är uppbyggd av microkontrollern AVR ATMega32, en analog avståndssensor, en servo samt andra passande komponenter. Rapporten innehåller bland annat specifikationer för modulen, hårdvaruinformation, implementation, kopplingsschema samt en diskussion av resultatet och eventuell vidareutveckling.
2 Innehållsförteckning Sammanfattning... 1 Inledning... 3 Arbetsmetod... 3 Kravspecifikation... 3 Den ursprungliga kravspecifikationen... 3 Den nya kravspecifikationen... 4 Komponenter... 4 Microkontroller Atmel AVR ATmega Long Distance Measuring Sensor GP2Y0A02YK... 5 Parallax Standard Servo (# )... 5 Full Bridge L Octal 3-State Noninverting D-Latch 74HC Ultra Low Dropout Regulator LP3855ET Mjukvara... 6 A/D-omvandling... 6 Timer... 7 Resultat... 7 Problem och svårigheter... 7 Lärdomar... 7 Vidareutveckling... 7 Appendix A : Figurer... 9 Appendix B: Källkod
3 Inledning Detta projekt är genomfört i kursen Digitala Projekt EDI021. En praktisk kurs som syftar till att ge elever möjlighet att designa och konstruera en prototyp av ett digitalt system. Man ges som student även en del övning i att planera sitt arbete väl och att producera ett resultat under viss tidspress. Ursprungligen var tanken att skapa en robot som kunde söka av och spara ner sin omgivning för att sedan presentera den insamlade datan på en display. Idén ansågs dock innebära för mycket arbete i relation till tiden som var rimligt att spendera på kursen och blev därför omarbetad. Konstruktionen utgår dock ifrån originalidén och är därför enkel att vidareutveckla. Arbetet med konstruktionen har gett oss en djupare förståelse för inbyggda system, hårdvara samt programmering av microkontrollers. Syftet med rapporten är att även kunna erbjuda andra den kunskap som erhållits av projektet. Arbetsmetod Eftersom ingen av oss haft särskilt stor erfarenhet av att arbeta med microkontrollers och hårdvara i största allmänhet, valde vi att arbeta på ett sätt som gjorde felsökning så enkel som möjligt. Det gick ut på att koppla in en komponent i taget, och köra ett program som var skrivit för att testa just den. Detta kom vi att ha stor nytta av i slutet av projektet när alla delar skulle integreras. Ifall det var någon komponent som inte längre fungerade som tänkt, kunde vi köra våra testfiler och jämföra med det slutgiltiga programmet. Kravspecifikation Arbetsgången som gällde i kursen var att ha höga målsättningar och väldigt optimistiska krav. Tanken var att man skulle ha något högt att sträva efter och skala ner projektet efterhand om så behövdes. Emellertid blev ändringarna i projektet så stora att kravspecifikationen gjordes om helt. Nedan presenteras därför båda kravspecifikationer. Den ursprungliga kravspecifikationen 1. Modulen ska kunna avgöra vilken yta som den befinner sig på. 2. Modulen ska klara av att avgöra och registrera utifall en yta innehåller ett hinder eller är åtkomlig. 3. Modulen ska kunna avgöra om given yta tidigare är utforskad eller inte. 4. Modulen ska kunna utforska ett område inom en given ram. 5. Ett område ska registreras som fullständigt utforskat då all åtkomlig yta inom en given ram är registrerad som hinder eller fri yta. 6. Modulen ska kunna sättas ingång, stängas av, startas/startas om, pausas, fortsättas och visa hittills registrerad omgivning Att sätta igång respektive stänga av modulen innebär att strömtillförseln sätts på respektive av. 3
4 6.2. Då modulen startas ges modulen en förutbestämd ram för vilket område som ska utforskas och en startposition. Allt område definieras som outforskat förutom ytan som täcks av modulen Då modulen pausas ska modulen stanna och utforskandet stoppas Då modulen fortsätter från pausat tillstånd ska utforskandet fortsättas Att visa omgivningen ska endast vara möjligt i pausat tillstånd. Endast en delmängd av omgivningen visas åt gången på skärmen. Användaren ska ha möjlighet att justera vilken delmängd av omgivningen visas via en knappsats. 7. Området på skärmen ska ha skiljda representationer av utforskad yta, fri yta samt hinderbelagd yta. 8. När en omgivning är fullständigt utforskad ska modulen pausas och indikera detta genom att en lysdiod slås på. 9. En yta representerar en area på 5x5 cm På skärmen ska varje yta representeras av en pixel. Den nya kravspecifikationen 1. Modulen ska kunna sättas igång och stängas av. 2. Modulen ska kunna förflytta sig framåt, samt rotera cirka 90 grader i båda horisontella riktningar. 3. Modulen ska kunna mäta avståndet till hinder inom avståndet cm i riktningarna rakt fram, åt höger samt åt vänster utifrån modulens perspektiv där rakt fram anses vara körriktningen. 4. Då modulen startas ska den köra rakt fram, till dess att ett framförliggande föremål i dess närhet registreras. 5. När ett föremål har registrerats ska modulen kontrollera avståndet till närmaste hinder åt vänster och höger, från konstruktionen sett. 6. Modulen ska efter en kontroll av avstånd åt höger och vänster, svänga åt det håll vars avstånd registrerat som längst till närmaste hinder. 7. Efter att modulen har svängt, ska samma programslinga exekveras som när den nyss har startats. 8. Konstruktionen ska hårdvarumässigt vara utformad på ett sådant sätt att den är enkel att vidareutveckla till en modul som uppfyller den ursprungliga kravspecifikationen. Komponenter De komponenter som användes för att bygga hårdvaran beskrivs ingående i denna sektion. Kopplingsschemat för hela modulen visas i Appendix, Figur 1. De komponenter som användes var: 4
5 Microkontroller Atmel AVR ATmega32 Long Distance Measuring Sensor GP2Y0A02YK Parallax Standard Servo (# ) Full Bridge L298 Octal 3-State Noninverting D-Latch 74HC373 Ultra Low Dropout Regulator LP3855ET-5.0 Två eldrivna motorer med hjul Strömbrytare Lysdioder och vanliga dioder Resistorer, kondensatorer och en spole Stödhjul Microkontroller Atmel AVR ATmega32 ATMega32:an är grundpelaren för styrningen av modulen. Det är processorn som innehåller och exekverar programkoden som bestämmer vad de olika delarna av modulen ska göra. Den har 40 pinnar att koppla in på samt många inbyggda funktioner som har varit mycket användbara i vårt arbete, bl a A/D-omvandling och klockor. Den har också pinnar avsedda för inkoppling av JTAG, som är nödvändig för att kunna överföra programkod från datorn. Long Distance Measuring Sensor GP2Y0A02YK Detta är en avståndsmätare som hela tiden ger en analog signal som skiftas beroende på avståndet mellan mätaren och det den är riktad mot. Den mäter avstånd mellan cm. Avståndsmätaren i sig var lätt att koppla in då den endast behövde matningsström (VCC och jord) och en pinne kopplad till en av pinnarna med A/D-omvandlare på microkontrollern. A/Domvandlingen i microkontrollern var då en mycket större del av problemet, som tas upp i mjukvarudelen av rapporten. Parallax Standard Servo (# ) Servomotorn användes för att ha avståndsmätaren på så att den kunde riktas i olika riktningar. Liksom med avståndsmätaren, var servomotorn lätt att koppla in, och arbetet låg än en gång i programmeringen av microkontrollern. Servon styrs utav pulser som skickas via en enda sladd som är inkopplad till microkontrollern, vilket både sparar pinnar och ger möjlighet till ett mycket högupplöst riktningsområde. För att få en stadig och enkelt programmerad styrning av servon kopplades den in på pinne PD5 (OC1A) som är en av pinnarna som är avsedda för utskickning av klocksignaler. Full Bridge L298 L298:an användes för att styra strömmatningen till motorerna till hjulen. Eftersom spänningen faller så pass mycket över microkontrollern och för att den inte skulle klara av strömflödet som 5
6 krävs för att driva motorerna igenom den kan inte motorerna kopplas direkt till microkontrollern. Strömflödet behövdes också kunna ändra riktning då motorerna skulle gå åt andra hållet när modulen skulle svänga. Kort sagt fungerar L298:an så att signalerna som skickas in på dess insignalportar skickas ut på utsignalsporterna, men med en annan matningsspänning som kopplas in på en annan pinne på komponenten. Andra pinnar användes för att sätta på och stänga av styrningen från insignalportarna. Octal 3-State Noninverting D-Latch 74HC373 Denna komponenten tar 8 insignaler och skickar vidare dem till utportarna om komponenten är aktiverad. Den var i själva verket onödig att använda med vår nuvarande design, men i vår ursprungliga ritning var den nödvändig för att kunna använda som ett mellansteg mellan microkontrollern och ouputkomponenter som skulle kopplas in på de 8 pinnarna som användes som en buss, eftersom komponenten kan aktiveras och inaktiveras vilket leder till att man kan bestämma vilken komponent som är inkopplad till bussen för tillfället. En likadan komponent har kopplats till bussen, men på andra hållet så att den fungerar som en latch för inputsignaler till microkontrollern (syns inte på kretsschemat). Den var från början avsedd till att koppla in knapparna på, men är för tillfället oanvänd, och vid möjlig enkel utbyggnad för att t ex göra modulen sladdstyrd med knappar skulle den troligen inte användas ändå då det är bättre att använda andra frigjorda pinnar. Ultra Low Dropout Regulator LP3855ET-5.0 Eftersom vi bara kunde få tag på ett batteri på 6V så var vi tvugna att använda en spänningsregulator för att minska spänningen över komponenterna, som för det mesta ska ha 5V över sig. Några resistorer och kondensatorer var nödvändiga att kopplas in för att få komponenten att fungera korrekt. Mjukvara Mjukvaran består av en enda klass som har en oändlig while-loop. Den börjar med en while-loop som skickar signaler till L298:an att aktivera strömmatningen till motorerna en väldigt kort stund och sedan läses avståndsmätaren av och kollar ifall det finns något framför modulen inom tillräckligt kort avstånd för att den ska stanna. Om det finns det lämnas while-loopen, annars fortsätter modulen att köra framåt. Sedan startas servon och pulser med rätt längd skickas ut till den för att den ska svänga till höger. Programmet pausas en stund för att låta servon hinna vrida sig till sin position innan avståndsmätaren läses av igen. Sedan görs samma sak för att kolla avståndet på vänster sida. Efter det vrids servon igen så att avståndsmätaren pekar framåt igen. Avståndsvärdena till höger och vänster jämförs och programmet går in i en sats för att svänga åt det hållet som har mest utrymme. Där ändras insignalerna till L298:an för att få ena motorn att gå baklänges, sedan skickas korta impulser till L298:an för att aktivera strömmatningen till motorerna under ett antal korta sekvenser för att få modulen att svänga. Därefter stängs servon av igen, för att spara ström, innan programmet återvänder till början av while-loopen. A/D-omvandling Koden för A/D-omvandlingen består av inställningar som skrivs till ADMUX-registret i microkontrollern. Där väljs inputpinne, vänster- eller högerjustering av de 10 bitarna som A/D- 6
7 omvandlingen ger tillbaka samt en spänningsreferens för det högsta spänningsvärdet på omvandlingsområdet (det lägsta är 0V). Den interna spänningsreferensen på 2,56V valdes för att få så stor upplösning som möjligt, eftersom den högsta spänningen avståndsmätaren ger tillbaka är 2,3V. För att starta en omvandling sätts de två första bitarna i registret ADCSRA till höga, sedan läses ADCL och ADCH av och slås ihop för att få det korrekta värdet. Timer Den svåraste biten av mjukvaran låg i att få pulserna till servon att vara korrekta. Servon styrs av en PWM-signal (Pulse Width Modulation) som är en signal med fast frekvens, men där längden förändras. Frekvensen behöver vara 50Hz, dvs att en puls var 20:e ms skickas. Vi behöver alltså sätta både när en ny puls börjar och när den slutar. Det första värdet är konstant och ändras aldrig medan det andra är det som ändras på för att styra servon. Klockan Timer1 används och dess frekvens bestäms av värdet på registret ICR1. Med hjälp av en formel i microkontrollerns datablad fastställs det att eftersom systemklockans frekvens är 8MHz, bör prescalern sättas till 8 och ICR1 till för att få en 50Hz-signal (8MHz / (2*8*10000) = 50Hz). Längden på pulsen bästäms av värdet som sätts till registret OCR1A. Vi skiftade mellan tre pulslängder för våra positioner (70 = höger, 600 = mitten, 1000 = vänster). Signalen skickas ut på pinne OC1A, vilket är den som servon är inkopplad på. Resultat Konstruktionen resulterade i en välfungerande prototyp som uppfyllde samtliga nya krav. Modulen kunde dock blivit mer stabil om mer tid lagts på finjusteringar och kalibrering. Problem och svårigheter Prototypen är inte riktigt så stabil som man hade kunnat önska. Exempelvis drar den snett åt vänster då den ska köra rakt fram och den svänger inte exakt 90 grader, det vill säga rakt åt höger eller rakt åt vänster, då den ska svänga. Vidare lyckades vi inte få servon som avståndssensorn sitter på att vrida sig till dess båda extremlägen, vilket gör att avståndsmätningen inte heller sker i helt rätt vinkel. Servon började nämligen vackla fram och tillbaka väldigt snabbt eller fastnade helt när vi valde att ha den i något extremläge. Enligt specifikationen skulle den klara av lite mer vridning än vad som utförs i dagsläget, men vi ansåg att det nästbästa var fullt dugligt också. Andra svårigheter som stöttes på under projektet var att få rätt på samtliga register som skulle aktiveras för att få timern att fungera. Även detta löste sig dock tillslut. Lärdomar Under detta projekt har vi fått lära oss mycket om hårdvara och en hel del om hur man söker effektivt bland datablad samt att förstå och ta till sig informationen de ger. Dessutom har man fått lära sig hur man programmerar en microkontroller, och med hjälp av denna styra andra komponenter. Vi har även fått erfarenhet av att planera om ett projekt för att hinna prestera ett resultat inom en viss deadline. Vidareutveckling och förbättringar 7
8 Som tidigare nämnts var konstruktionen från början tänkt kunna göra något mer än det den för tillfället klarar av. Nämligen att kartlägga området den kör på och visa upp detta på en display. Sättet för att gå till väga implementationsmässigt hade varit dela upp området som ska köras på i ett rutnät och spara undan information om varje ruta i en matris internt. Varje element i matrisen hade kunnat lagra en två bitar stor variabel där en siffra motsvarade outforskat område, en för utforskat och fritt samt en för utforskat med hinder på. Informationen hade enkelt kunnats få med hjälp av befintlig hårdvara. Däremot skulle ett externt minne krävas för att lagra matrisen om man skulle vilja ha relativt hög upplösning, då minnet i mircokontrollern inte hade räckt så långt. Vidare hade en display behövts koppla in om man skulle vilja presentera datan på ett visuellt sätt, och gärna en knappsats för att kunna välja vilket område av kartan som skulle visats. Vår konstruktion är utformad så att den nya hårdvaran som hade krävts för den här typen av vidareutveckling är enkel att göra. Outputen från processorn är nämligen kopplad via en D-latch som går att aktivera via porten chipselect. Detta innebär att man inte behöver använda fler pinnar från processorn för att koppla in en knappsats eller display, utan kan utnyttja samma pinnar som används till D-latchen. Andra sätt som konstruktionen skulle kunna vidareutvecklas på är exempelvis att fästa sensorer på undersidan av främre delen av den, så att kanter hade kunnat upptäckas. Någonting som definitivt hade kunnat förbättras, och garanterat hade behövts om konstruktionen gjorts mer komplicerad är refaktoriseringar och bättre struktur av koden. Tanken var först att få allting att fungera på enklast möjliga vis, vilket ledde till en del klipp och klistra kod. Dock valde vi att presentera den kod som faktiskt ligger på konstruktionen i dagsläget som vi till hundra procent vet fungerar. 8

9 Appendix A : Figurer Figur 1: Blockschema 9

10 10
11 Appendix B: Källkod #include <avr/io.h> #include <util/delay.h> int main(void) { int anhigh = 0; int anlow = 0; int antot = 0; int go = 1; int green = 1; int left = 0; int right = 0; int speed = 200; // set a1 to a7 to output DDRA = 0b ; // two first bits, voltage reference internal // bit 3, output bits left adjusted // the rest bits, input pin is ADC0 ADMUX = 0b ; // Prescaler N=8 then TOP(ICR1) = // Because 8MHz / (2*8*10000) = 50Hz TCCR1B = 0b ; ICR1 = 10000; //8-bit, Inverted PWM TCCR1A = 0b ; // Adjust servo to pointing forward DDRD = 0b ; OCR1A = 600; _delay_ms(2000); DDRD = 0b ; PORTD = 0b ; // set c6 and c7 to output (OE, LE for outputlatch) DDRC = 0b ; // set (pin c7)le high and (pin c6)oe low (output = input) PORTC = 0b ; // In2, In4 set to on, enable A and B on (pin A4 and A1) PORTA = 0b ; // Turn off enable A and B, wheels should stop spinning PORTA = 0b ; // drive forward until the distance sensor registers a close object ADCSRA = 0b ; PORTA = 0b ; _delay_ms(100); PORTA = 0b ; _delay_ms(400); anlow = ADCL; anhigh = ADCH; antot = anlow + 256*anhigh; while(1) { 11
12 while(go){ ADCSRA = 0b ; PORTA = 0b ; _delay_ms(speed); PORTA = 0b ; _delay_ms(400); anlow = ADCL; anhigh = ADCH; antot = anlow + 256*anhigh; if(antot > 900 && antot!= 1023){ go = 0; go = 1; PORTA = 0b ; // Start the servo DDRD = 0b ; OCR1A = 600; _delay_ms(50000); // Turn the servo right, and let the distance sensor read and // store the value OCR1A = 70; _delay_ms(50000); ADCSRA = 0b ; _delay_ms(10); anlow = ADCL; anhigh = ADCH; right = anlow + 256*anhigh; OCR1A = 600; _delay_ms(50000); // Turn the servo left, and let the distance sensor read and // store the value OCR1A = 1000; _delay_ms(50000); ADCSRA = 0b ; _delay_ms(10); anlow = ADCL; anhigh = ADCH; left = anlow + 256*anhigh; // Turn the servo straight forward OCR1A = 600; _delay_ms(50000); if(left < right) { // Turn the entire construction to the left PORTA = 0b ; for(int i = 0; i < 25; i++){ ADCSRA = 0b ; PORTA = 0b ; PORTD = 0b ; _delay_ms(speed); PORTA = 0b ; _delay_ms(400); anlow = ADCL; 12
13 anhigh = ADCH; antot = anlow + 256*anhigh; PORTD = 0b ; else { //Turn the entire construction to the right PORTA = 0b ; for(int i = 0; i < 25; i++){ ADCSRA = 0b ; PORTA = 0b ; _delay_ms(speed); PORTA = 0b ; _delay_ms(400); anlow = ADCL; anhigh = ADCH; antot = anlow + 256*anhigh; // Turn off the servo DDRD = 0b ; return 1; 13
Bilen som inte kan krocka
 Projektrapport Digitala system EITA15 Bilen som inte kan krocka Gruppmedlemmar: Oscar Skarler, Jonathan Persson, Erik Schiemann och Mohammed Abou Naasa vt 2019 Sammanfattning Inom kursen Digitala system
Projektrapport Digitala system EITA15 Bilen som inte kan krocka Gruppmedlemmar: Oscar Skarler, Jonathan Persson, Erik Schiemann och Mohammed Abou Naasa vt 2019 Sammanfattning Inom kursen Digitala system
Effektpedal för elgitarr
 EITF11 - Digitala Projekt Effektpedal för elgitarr Handledare: Bertil Lindvall Ivan Rimac (I05) Jimmy Lundberg (I08) 2011-05-10 Contents Bakgrund... 3 Kravspecifikation... 3 Kravspecifikation Effektpedal...
EITF11 - Digitala Projekt Effektpedal för elgitarr Handledare: Bertil Lindvall Ivan Rimac (I05) Jimmy Lundberg (I08) 2011-05-10 Contents Bakgrund... 3 Kravspecifikation... 3 Kravspecifikation Effektpedal...
Växtviskaren EITF11 Digitala projekt VT15, I12
 Växtviskaren EITF11DigitalaprojektVT15,I12 NathalieLiljebrunn,EbbaRiismark,AnnaNorelius LundsTekniskaHögskola Institutionenförelektro ochinformationsteknik Handledare:BertilLindvall,AndreasJohansson 2015
Växtviskaren EITF11DigitalaprojektVT15,I12 NathalieLiljebrunn,EbbaRiismark,AnnaNorelius LundsTekniskaHögskola Institutionenförelektro ochinformationsteknik Handledare:BertilLindvall,AndreasJohansson 2015
ETSA01 Digitala Projekt (I) VT- 13. Projektarbete AC- 58008. Handledare Bertil Lindvall
 VT- 13. Projektarbete AC- 58008. Handledare Bertil Lindvall") ETSA01 Digitala Projekt (I) VT- 13 Projektarbete AC- 58008 Victor Bodin Albert Strömberg Alexander Söderberg Handledare Bertil Lindvall 1 Sammanfattning Rapporten behandlar processen kopplat till konstruktionen
ETSA01 Digitala Projekt (I) VT- 13 Projektarbete AC- 58008 Victor Bodin Albert Strömberg Alexander Söderberg Handledare Bertil Lindvall 1 Sammanfattning Rapporten behandlar processen kopplat till konstruktionen
LARMANLÄGGNING. Digitala Projekt, EITF11. Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall
 LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
Digitala Projekt(EITF40) - Larm
 - Larm") Digitala Projekt(EITF40) - Larm Handledare: Bertil Lindvall Erik Oredsson, I-09 Sara Sellin, I-09 2012-05-08 1. SAMMANFATTNING I denna rapport presenteras vårt projekt att bygga ett huslarm från grunden
Digitala Projekt(EITF40) - Larm Handledare: Bertil Lindvall Erik Oredsson, I-09 Sara Sellin, I-09 2012-05-08 1. SAMMANFATTNING I denna rapport presenteras vårt projekt att bygga ett huslarm från grunden
Temperaturmätare med lagringsfunktion DIGITALA PROJEKT EITF11 GRUPP 14, ERIK ENFORS, LUDWIG ROSENDAL, CARL MIKAEL WIDMAN
 2016 Temperaturmätare med lagringsfunktion DIGITALA PROJEKT EITF11 GRUPP 14, ERIK ENFORS, LUDWIG ROSENDAL, CARL MIKAEL WIDMAN Innehållsförteckning INLEDNING... 3 KRAVSPECIFIKATION AV PROTOTYP... 3 FUNKTIONELLA
2016 Temperaturmätare med lagringsfunktion DIGITALA PROJEKT EITF11 GRUPP 14, ERIK ENFORS, LUDWIG ROSENDAL, CARL MIKAEL WIDMAN Innehållsförteckning INLEDNING... 3 KRAVSPECIFIKATION AV PROTOTYP... 3 FUNKTIONELLA
JOFEN-Prototypes. Målsökande pansarvagn. Projektarbete i Kursen EITA15. Jonatan Claesson, Olle Jonasson, Felix Rödén, Edvin Rossi & Nils Olén
 JOFEN-Prototypes Målsökande pansarvagn Projektarbete i Kursen EITA15 Jonatan Claesson, Olle Jonasson, Felix Rödén, Edvin Rossi & Nils Olén Handledare: Bertil Lindvall & Lars-Göran Larsson Abstract This
JOFEN-Prototypes Målsökande pansarvagn Projektarbete i Kursen EITA15 Jonatan Claesson, Olle Jonasson, Felix Rödén, Edvin Rossi & Nils Olén Handledare: Bertil Lindvall & Lars-Göran Larsson Abstract This
Snake. Digitala Projekt (EITF11) Fredrik Jansson, I-12 Lunds Tekniska Högskola,
 Fredrik Jansson, I-12 Lunds Tekniska Högskola,") Snake Digitala Projekt (EITF11) Fredrik Jansson, I-12 Lunds Tekniska Högskola, 2015-05-18 Oskar Petersen, I-12 Handledare: Bertil Lindvall Abstract Denna rapport beskriver ett projekt där ett klassiskt
Snake Digitala Projekt (EITF11) Fredrik Jansson, I-12 Lunds Tekniska Högskola, 2015-05-18 Oskar Petersen, I-12 Handledare: Bertil Lindvall Abstract Denna rapport beskriver ett projekt där ett klassiskt
Larmcentral. Digitala Projekt. Cecilia Olsson & Erika Björck Handledare: Bertil Lindvall LUNDS TEKNISKA HÖGSKOLA 2015-05-18
 2015 Larmcentral Digitala Projekt Cecilia Olsson & Erika Björck Handledare: Bertil Lindvall LUNDS TEKNISKA HÖGSKOLA 2015-05-18 Inledning Denna rapport är en sammanställning av projektet i kursen Digitala
2015 Larmcentral Digitala Projekt Cecilia Olsson & Erika Björck Handledare: Bertil Lindvall LUNDS TEKNISKA HÖGSKOLA 2015-05-18 Inledning Denna rapport är en sammanställning av projektet i kursen Digitala
LTH. EITF11- Digitalaprojekt. Projektrapport WEB
 EITF11- Digitalaprojekt Projektrapport 2011-05- 10 WEB Projekt utfört av Per Gifvars och Johan Linåker http://www.eit.lth.se/fileadmin/eit/courses/edi021/sammanfattning/2011/lp4/grupp3/html.html Abstract
EITF11- Digitalaprojekt Projektrapport 2011-05- 10 WEB Projekt utfört av Per Gifvars och Johan Linåker http://www.eit.lth.se/fileadmin/eit/courses/edi021/sammanfattning/2011/lp4/grupp3/html.html Abstract
Rapport. Fyra i rad-spel. Rapport Digitala Projekt EITF11 Grupp 9 Emma Rasmusson & Louise Ragnarsson Handledare: Bertil Lindvall
 Rapport Digitala Projekt EITF11 2017-05-08 Rapport Fyra i rad-spel Sammanfattning: Detta dokument beskriver arbetsprocessen i det projekt som är en del av kursen Digitala Projekt(EITF11) vid Lunds Tekniska
Rapport Digitala Projekt EITF11 2017-05-08 Rapport Fyra i rad-spel Sammanfattning: Detta dokument beskriver arbetsprocessen i det projekt som är en del av kursen Digitala Projekt(EITF11) vid Lunds Tekniska
TEMPERATURMÄTARE MED GRAFRITARE
 LUNDS TEKNISKA HÖGSKOLA TEMPERATURMÄTARE MED GRAFRITARE Grupp 6 Jesper Henrikson & Viktor Sköld Handledare: Bertil Lindvall 1 Innehållsförteckning Innehållsförteckning 2 Inledning 3 Kravspecifikation 4
LUNDS TEKNISKA HÖGSKOLA TEMPERATURMÄTARE MED GRAFRITARE Grupp 6 Jesper Henrikson & Viktor Sköld Handledare: Bertil Lindvall 1 Innehållsförteckning Innehållsförteckning 2 Inledning 3 Kravspecifikation 4
Konstruktion av en radiostyrd legobil. Digitala projekt av Arbon Vata Leonardo Vukmanovic Amid Bhatia
 Konstruktion av en radiostyrd legobil Digitala projekt av Arbon Vata Leonardo Vukmanovic Amid Bhatia 1 1.Innehållsförtäckning Rapport Radiostyrd LEGO bil...1 1. Innehållsförtäckning...2 2.0 Inledning...3
Konstruktion av en radiostyrd legobil Digitala projekt av Arbon Vata Leonardo Vukmanovic Amid Bhatia 1 1.Innehållsförtäckning Rapport Radiostyrd LEGO bil...1 1. Innehållsförtäckning...2 2.0 Inledning...3
Digitala projekt - Radiostyrd bil
 Digitala projekt - Radiostyrd bil Handledare: Bertil Lindvall Johan Lennartsson e02jle David Thomasson e02dt Magnus Lisborg e02mls Innehållsförteckning 1. Inledning.3 2. Målsättning med projektet.......3
Digitala projekt - Radiostyrd bil Handledare: Bertil Lindvall Johan Lennartsson e02jle David Thomasson e02dt Magnus Lisborg e02mls Innehållsförteckning 1. Inledning.3 2. Målsättning med projektet.......3
Lunds Tekniska Högskola Elektro- och informationsteknik Digitala projekt (EITF11)
") Skola: Institution : Kurs : Lunds Tekniska Högskola Elektro- och informationsteknik Digitala projekt (EITF11) Projekttyp : Rapportsammanfattning Handledare : Bertil Lindvall Studenter : Datum : 2015-05-11
Skola: Institution : Kurs : Lunds Tekniska Högskola Elektro- och informationsteknik Digitala projekt (EITF11) Projekttyp : Rapportsammanfattning Handledare : Bertil Lindvall Studenter : Datum : 2015-05-11
Digitala Projekt(EITF40) - Larm
 - Larm") Digitala Projekt(EITF40) - Larm Handledare: Bertil Lindvall Kristoffer Sätermark, dt08ks6 Magnus Johansson, dt08mj9 Innehåll 1 Introduktion 1 2 Kravspec 1 3 Hårdvara 2 3.1 knappsats och decoder........................
Digitala Projekt(EITF40) - Larm Handledare: Bertil Lindvall Kristoffer Sätermark, dt08ks6 Magnus Johansson, dt08mj9 Innehåll 1 Introduktion 1 2 Kravspec 1 3 Hårdvara 2 3.1 knappsats och decoder........................
Rapport Digitala Projekt EITF11 Grupp 4 Axel Sundberg, Jakob Wennerström Gille Handledare: Bertil Lindvall
 Sammanfattning I denna rapport behandlas ett projekt inom kursen Digitala Projekt, EITF11, vid Lunds Tekniska högskola. Syftet med projektet är att konstruera en enkel digital prototyp samt programmera
Sammanfattning I denna rapport behandlas ett projekt inom kursen Digitala Projekt, EITF11, vid Lunds Tekniska högskola. Syftet med projektet är att konstruera en enkel digital prototyp samt programmera
Innehållsförteckning. Figur- och tabellförteckning. Figure 1 Blockschema över hårdvaran...4 Figure 2 Blockschema över programet...
 Abstract Syftet var att konstruera en väder station som håller koll på temperaturen. Huvudfunktionen var att få en grafisk visning av temperaturen över ett visst tidsintervall eftersom vi valde den grafiska
Abstract Syftet var att konstruera en väder station som håller koll på temperaturen. Huvudfunktionen var att få en grafisk visning av temperaturen över ett visst tidsintervall eftersom vi valde den grafiska
LARMANLÄGGNING. Digitala Projekt, EITF11. Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall
 LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
LARMANLÄGGNING Digitala Projekt, EITF11 Oskar von Knorring Emin Karimov Henrik Akej Handledare: Bertil Lindvall 1. Sammanfattning Vi har byggt ett larm vars syfte är att användas i hemmet. Larmet använder
Digitala projekt, EDI021 Rapport Handledare: Bertil Lindvall
 Digitala projekt, EDI021 Rapport Handledare: Bertil Lindvall Zoltan Darvas (dt06zd8) Nicklas Nidhögg(dt06nn8) 2010-03-01 1 Abstract I detta project har vi skapat ett huslarm där det finns två stycken sensorer,
Digitala projekt, EDI021 Rapport Handledare: Bertil Lindvall Zoltan Darvas (dt06zd8) Nicklas Nidhögg(dt06nn8) 2010-03-01 1 Abstract I detta project har vi skapat ett huslarm där det finns två stycken sensorer,
EITF11 - Digitala projekt. Hastighetsmätare. Hugo Backmyr Mattias Karlsson
 EITF11 - Digitala projekt Hastighetsmätare Hugo Backmyr 2015-05-17 Inledning Syftet med kursen är att illustrera industriellt utvecklingsarbete. Målet med projektuppgiften är en prototyp för vidareutveckling
EITF11 - Digitala projekt Hastighetsmätare Hugo Backmyr 2015-05-17 Inledning Syftet med kursen är att illustrera industriellt utvecklingsarbete. Målet med projektuppgiften är en prototyp för vidareutveckling
Thunder s Truck projektrapport
 LTH Thunder s Truck projektrapport EITF11 Digitala projekt 2012-05-10 Abstract The goal of this project was to build a truck operated by an IP-remote. The robot is built using standard parts such as two
LTH Thunder s Truck projektrapport EITF11 Digitala projekt 2012-05-10 Abstract The goal of this project was to build a truck operated by an IP-remote. The robot is built using standard parts such as two
Feeding Daisy. EITF11 Lunds Tekniska Högskola. Grupp 12: Pontus Akervall Louise Landare Anton Schölin. En automatisk blomvattnare
 Feeding Daisy En automatisk blomvattnare EITF11 Lunds Tekniska Högskola Grupp 12: Pontus Akervall Louise Landare Anton Schölin Handledare: Bertil Lindvall Introduktion... 3 Hårdvara... 3 Processor... 3
Feeding Daisy En automatisk blomvattnare EITF11 Lunds Tekniska Högskola Grupp 12: Pontus Akervall Louise Landare Anton Schölin Handledare: Bertil Lindvall Introduktion... 3 Hårdvara... 3 Processor... 3
PlantPuppy Räddaren för den som inte kan hålla växterna vid liv
 Lunds Tekniska Högskola Elektro- och informationsteknik Digitala Projekt PlantPuppy Räddaren för den som inte kan hålla växterna vid liv Gerda Sidwall Thygesen Sofia Sundbom Zoë Wyon ine14gth@student.lu.se
Lunds Tekniska Högskola Elektro- och informationsteknik Digitala Projekt PlantPuppy Räddaren för den som inte kan hålla växterna vid liv Gerda Sidwall Thygesen Sofia Sundbom Zoë Wyon ine14gth@student.lu.se
Projektrapport - Roterande digital LED-klocka
 Projektrapport - Roterande digital LED-klocka Kurs : EITF 11 - Digitala projekt Elever : Axel Truedsson, Erik Lundström, Sara Åkerblom Handledare : Bertil Lindvall Datum : 2017-05-17 Lunds Tekniska Högskola
Projektrapport - Roterande digital LED-klocka Kurs : EITF 11 - Digitala projekt Elever : Axel Truedsson, Erik Lundström, Sara Åkerblom Handledare : Bertil Lindvall Datum : 2017-05-17 Lunds Tekniska Högskola
Pulsmätare Digitala Projekt EITF11
 Pulsmätare Digitala Projekt EITF11 Grupp 5 Sebastian Mattsson, 900611 ain09sma@student.lu.se Johannes Persson, 880823 ain09jpe@student.lu.se Handledare: Bertil Lindvall Innehållsförteckning Inledning...3
Pulsmätare Digitala Projekt EITF11 Grupp 5 Sebastian Mattsson, 900611 ain09sma@student.lu.se Johannes Persson, 880823 ain09jpe@student.lu.se Handledare: Bertil Lindvall Innehållsförteckning Inledning...3
Digitala Projekt (EITF11)
") Digitala Projekt (EITF11) Temperaturgivare med larm Handledare: Bertil Lindvall 2014-05-20 Erik Hellered, I-11 Andreas Sjöblom, I-11 Philip Dahlström, I-11 Table of Contents Inledning... 1 Kravspecifikation...
Digitala Projekt (EITF11) Temperaturgivare med larm Handledare: Bertil Lindvall 2014-05-20 Erik Hellered, I-11 Andreas Sjöblom, I-11 Philip Dahlström, I-11 Table of Contents Inledning... 1 Kravspecifikation...
DIGITALA PROJEKT Väderstation
 DIGITALA PROJEKT Väderstation Christian Lindquist, E03 Leonardo Bello, E03 Abstract Almost everybody has some kind of temperature measurement device in their home. The latest in this industry are more
DIGITALA PROJEKT Väderstation Christian Lindquist, E03 Leonardo Bello, E03 Abstract Almost everybody has some kind of temperature measurement device in their home. The latest in this industry are more
/* * dancing3.c * * Created: :53:20 * Author: digpi10 */ #include <avr/io.h> #include <avr/interrupt.h> #include <util/delay.
 /* * dancing3.c * * Created: 2016-05-19 10:53:20 * Author: digpi10 */ #include #include #include int value; //värde från AD-omvandlaren int limit = 0b0101000000;
/* * dancing3.c * * Created: 2016-05-19 10:53:20 * Author: digpi10 */ #include #include #include int value; //värde från AD-omvandlaren int limit = 0b0101000000;
Självgående fordon Rapport i kursen digitala projekt, EDI021
 Självgående fordon Rapport i kursen digitala projekt, EDI021 Nina Wirandi e04nw Mårten Kjellsson e04mk Handledare: Bertil Lindvall Mars 2010 Abstract This project was for the course Digital Systems, EDI021
Självgående fordon Rapport i kursen digitala projekt, EDI021 Nina Wirandi e04nw Mårten Kjellsson e04mk Handledare: Bertil Lindvall Mars 2010 Abstract This project was for the course Digital Systems, EDI021
RemoteBud. Inlämnas: Patrik Johnsson, e01pjo Viktor Karlsson, e01vk
 RemoteBud Inlämnas: 2005-02-01 Patrik Johnsson, e01pjo Viktor Karlsson, e01vk Abstract Skulle du också vilja styra dina lampor och rulla ner dina persienner med hjälp av din TV-fjärrkontroll? Remotebud
RemoteBud Inlämnas: 2005-02-01 Patrik Johnsson, e01pjo Viktor Karlsson, e01vk Abstract Skulle du också vilja styra dina lampor och rulla ner dina persienner med hjälp av din TV-fjärrkontroll? Remotebud
Pulsmätare med varningsindikatorer
 Pulsmätare med varningsindikatorer Elektro- och informationsteknik Projektrapport, EITF11 Digitala Projekt Charlie Hedhav Sofia Johansson Louise Olsson 2016-05-17 Abstract During the course Digitala Projekt
Pulsmätare med varningsindikatorer Elektro- och informationsteknik Projektrapport, EITF11 Digitala Projekt Charlie Hedhav Sofia Johansson Louise Olsson 2016-05-17 Abstract During the course Digitala Projekt
Digitala projekt rapport
 Digitala projekt rapport Alexander Westrup, d04aw@student.lth.se Martin Sandgren, d04ms@student.lth.se 4 december 2007 Innehåll 1 Abstract 1 2 Inledning 1 3 Arbetsgång 1 4 Hårdvara 1 4.1 Processor...............................
Digitala projekt rapport Alexander Westrup, d04aw@student.lth.se Martin Sandgren, d04ms@student.lth.se 4 december 2007 Innehåll 1 Abstract 1 2 Inledning 1 3 Arbetsgång 1 4 Hårdvara 1 4.1 Processor...............................
LOOKY LUKE. Caroline Hellström och Ville Orlander Arvola Industriell ekonomi I10. - Att välja en lyckosam väg EITF11 Digitala projekt
 LOOKY LUKE - Att välja en lyckosam väg EITF11 Digitala projekt Caroline Hellström och Ville Orlander Arvola Industriell ekonomi I10 Handledare: Bertil Lindvall 2013-05-19 Abstract This project was done
LOOKY LUKE - Att välja en lyckosam väg EITF11 Digitala projekt Caroline Hellström och Ville Orlander Arvola Industriell ekonomi I10 Handledare: Bertil Lindvall 2013-05-19 Abstract This project was done
TEMPERATUR OCH VINDMÄTARE MED HÖGTALARFUNKTION
 TEMPERATUR OCH VINDMÄTARE MED HÖGTALARFUNKTION Digitala Projekt EITF 11, 18 maj 2015 Grupp 13; Morten Rosén, Henrik Boris-Möller, Christoffer Nordberg Projekthandledare: Bertil Lindvall Innehållsförteckning
TEMPERATUR OCH VINDMÄTARE MED HÖGTALARFUNKTION Digitala Projekt EITF 11, 18 maj 2015 Grupp 13; Morten Rosén, Henrik Boris-Möller, Christoffer Nordberg Projekthandledare: Bertil Lindvall Innehållsförteckning
Mekanisk solros, Digitala projekt(edi021) Kristoer Nordvall, Stefan Windfeldt, Inlämmnad: 4 december 2006
 Kristoer Nordvall, Stefan Windfeldt, Inlämmnad: 4 december 2006") Mekanisk solros, Digitala projekt(edi021) Kristoer Nordvall, d03kn@student.lth.se Stefan Windfeldt, d03sw@student.lth.se Inlämmnad: 4 december 2006 Innehåll 1 Problembeskrivning 3 2 Teknisk beskrivning
Mekanisk solros, Digitala projekt(edi021) Kristoer Nordvall, d03kn@student.lth.se Stefan Windfeldt, d03sw@student.lth.se Inlämmnad: 4 december 2006 Innehåll 1 Problembeskrivning 3 2 Teknisk beskrivning
Digitala projekt Linjeföljande bil
 Digitala projekt Linjeföljande bil EITA15 Elektro- och informationsteknik Handledare: Bertil Lindvall Grupp 17 Hannes Adolfsson Milad Amini Albin Svärd Almir Šaran Emir Zukic EITA 15 - Digitala projekt
Digitala projekt Linjeföljande bil EITA15 Elektro- och informationsteknik Handledare: Bertil Lindvall Grupp 17 Hannes Adolfsson Milad Amini Albin Svärd Almir Šaran Emir Zukic EITA 15 - Digitala projekt
Linjeföljare Digitala projekt Johan Engström e02je Henrik Persson e02hp
 2005-12-11 Linjeföljare Digitala projekt Johan Engström e02je Henrik Persson e02hp Abstract This project is about how we built a line follower. The project-course is given by the It-institution of LTH
2005-12-11 Linjeföljare Digitala projekt Johan Engström e02je Henrik Persson e02hp Abstract This project is about how we built a line follower. The project-course is given by the It-institution of LTH
The Secure Light. Digitala Projekt EITF11. Hanna Tinglöf, I-12 Anna Horvath, I-12 Filippa Österlin, I-12. Handledare: Bertil Lindvall
 The Secure Light Digitala Projekt EITF11 Hanna Tinglöf, I-12 Anna Horvath, I-12 Filippa Österlin, I-12 Handledare: Bertil Lindvall Lunds Tekniska Högskola 2015-05-18 ABSTRACT The Secure Light is the new
The Secure Light Digitala Projekt EITF11 Hanna Tinglöf, I-12 Anna Horvath, I-12 Filippa Österlin, I-12 Handledare: Bertil Lindvall Lunds Tekniska Högskola 2015-05-18 ABSTRACT The Secure Light is the new
Enchipsdatorer med tillämpningar LABORATION 7, ROBOT
 Enchipsdatorer med tillämpningar LABORATION 7, ROBOT Laborationsansvariga: Anders Arvidsson Utskriftsdatum: 2005-05-14 Laboranter: 1 Syfte Denna laboration syftar till att introducera interrupt och watchdog
Enchipsdatorer med tillämpningar LABORATION 7, ROBOT Laborationsansvariga: Anders Arvidsson Utskriftsdatum: 2005-05-14 Laboranter: 1 Syfte Denna laboration syftar till att introducera interrupt och watchdog
Laboration 4: Knappstuds Drivrutiner för att eliminera störningar.
 ATMega16 Laborationer av Kjell 2 Rev:5 Datum: 29.09.2010 Page 1 of 7 Laboration 4: Knappstuds Drivrutiner för att eliminera störningar. Inledning: Laborationskortet EasyAVR6 har bland annat tryckknappar
ATMega16 Laborationer av Kjell 2 Rev:5 Datum: 29.09.2010 Page 1 of 7 Laboration 4: Knappstuds Drivrutiner för att eliminera störningar. Inledning: Laborationskortet EasyAVR6 har bland annat tryckknappar
The Intelligent Timer
 The Intelligent Timer Linnea Karell och Oscar Bagge, I10 Handledare: Bertil Lindvall 2013-05-20 Abstract The objective of this project was to build a prototype of a digital timer. The product design specification
The Intelligent Timer Linnea Karell och Oscar Bagge, I10 Handledare: Bertil Lindvall 2013-05-20 Abstract The objective of this project was to build a prototype of a digital timer. The product design specification
Laboration 5. Temperaturmätning med analog givare. Tekniska gränssnitt 7,5 p. Förutsättningar: Uppgift: Temperatur:+22 C
 Namn: Laborationen godkänd: Tekniska gränssnitt 7,5 p Vt 2014 Laboration 5 LTH Ingenjörshögskolan vid Campus Helsingborg Temperaturmätning med analog givare. Syftet med laborationen är att studera analog
Namn: Laborationen godkänd: Tekniska gränssnitt 7,5 p Vt 2014 Laboration 5 LTH Ingenjörshögskolan vid Campus Helsingborg Temperaturmätning med analog givare. Syftet med laborationen är att studera analog
EITF11: Bandkanon Grp 05
 EITF11: Bandkanon Grp 05 Kristofer Adolfsson John Karlsson Erik Lagerberg Handledare: Bertil Lindvall Abstract This project was planned and completed during the course EITF11 at Lund Tekniska Högskola
EITF11: Bandkanon Grp 05 Kristofer Adolfsson John Karlsson Erik Lagerberg Handledare: Bertil Lindvall Abstract This project was planned and completed during the course EITF11 at Lund Tekniska Högskola
DIGITALA PROJEKT (EITF40) Fartmätare
 Fartmätare") ELEKTRO- OCH INFORMATIONSTEKNIK DIGITALA PROJEKT (EITF40) Fartmätare Handledare: Bertil Lindvall Per Fernström, ie09pf7 Albin Nilsson, ie09an4 5/14/2012 1 Abstract The purpose behind this project is to
ELEKTRO- OCH INFORMATIONSTEKNIK DIGITALA PROJEKT (EITF40) Fartmätare Handledare: Bertil Lindvall Per Fernström, ie09pf7 Albin Nilsson, ie09an4 5/14/2012 1 Abstract The purpose behind this project is to
Projektrapport i Digitala System
 Projektrapport i Digitala System Stämapparat LTH Ingenjörshögskolan vid Campus Helsingborg Handledare: Bertil Lindvall Utförd: Vårtermin 2019 Utförd av: Markus Ljungqvist Nilsson, Gustav Wetterbrandt,
Projektrapport i Digitala System Stämapparat LTH Ingenjörshögskolan vid Campus Helsingborg Handledare: Bertil Lindvall Utförd: Vårtermin 2019 Utförd av: Markus Ljungqvist Nilsson, Gustav Wetterbrandt,
EITF40 - RFID-terminal. Joakim Marculescu (dt08jm6), Eric Johansson (dt08ej6) 2012-02-28
, Eric Johansson (dt08ej6) 2012-02-28") EITF40 - RFID-terminal Joakim Marculescu (dt08jm6), Eric Johansson (dt08ej6) 2012-02-28 Contents 1 Introduktion 3 2 Kravspecifikation 3 3 Prototypen 4 3.1 Hårdvara............................... 4 3.2
EITF40 - RFID-terminal Joakim Marculescu (dt08jm6), Eric Johansson (dt08ej6) 2012-02-28 Contents 1 Introduktion 3 2 Kravspecifikation 3 3 Prototypen 4 3.1 Hårdvara............................... 4 3.2
Micro:bit och servomotorer
 Micro:bit och servomotorer Servomotorer som beskrivs här är så kallade micro servos och har beteckningarna: FS90 FS90R En servomotor har tre kablar. En brun som kopplas till GND, en röd som är för strömförsörjning
Micro:bit och servomotorer Servomotorer som beskrivs här är så kallade micro servos och har beteckningarna: FS90 FS90R En servomotor har tre kablar. En brun som kopplas till GND, en röd som är för strömförsörjning
EITF11. WormFight. Axel Eriksson, Felix Geuken Handledare: Bertil Lindvall EITF11
 EITF11 WormFight Axel Eriksson, Felix Geuken Handledare: Bertil Lindvall EITF11 Innehåll Inledning... 3 Kravspecifikation... 3 Teori - Hårdvara... 3 Processor - AVR ATMega16... 3 Display - GDM12864C...
EITF11 WormFight Axel Eriksson, Felix Geuken Handledare: Bertil Lindvall EITF11 Innehåll Inledning... 3 Kravspecifikation... 3 Teori - Hårdvara... 3 Processor - AVR ATMega16... 3 Display - GDM12864C...
EITF11 Digitala Projekt TIC TAC TOE. Lukas Ljungblom & Johan Lyckenvik I-13 Handledare: Bertil Lindvall
 EITF11 Digitala Projekt TIC TAC TOE Lukas Ljungblom & Johan Lyckenvik I-13 Handledare: Bertil Lindvall Lunds Tekniska Högskola VT 2016 0 Sammanfattning Rapporten handlar om ett projekt i kursen EITF11
EITF11 Digitala Projekt TIC TAC TOE Lukas Ljungblom & Johan Lyckenvik I-13 Handledare: Bertil Lindvall Lunds Tekniska Högskola VT 2016 0 Sammanfattning Rapporten handlar om ett projekt i kursen EITF11
Projektrapport - Feststation
 Projektrapport - Feststation Program: Industriell Ekonomi, LTH Kurs: EITF11 Digitala projekt Elever : Simon Janzon, Ellen Peber & Love Regefalk, Handledare: Bertil Lindvall & Christoffer Cederberg Datum:
Projektrapport - Feststation Program: Industriell Ekonomi, LTH Kurs: EITF11 Digitala projekt Elever : Simon Janzon, Ellen Peber & Love Regefalk, Handledare: Bertil Lindvall & Christoffer Cederberg Datum:
Från idé till skapelse av en äkta RoomBot
 Institutionen för elektro- och informationsteknik vid LTH Från idé till skapelse av en äkta RoomBot Projektarbete i kursen EITF11 - Digitala Projekt Gustav Handmark, Claudio Gandra & Kasper Trolltoft -
Institutionen för elektro- och informationsteknik vid LTH Från idé till skapelse av en äkta RoomBot Projektarbete i kursen EITF11 - Digitala Projekt Gustav Handmark, Claudio Gandra & Kasper Trolltoft -
Ett urval D/A- och A/D-omvandlare
 Ett urval D/A- och A/D-omvandlare Om man vill ansluta en mikrodator (eller annan digital krets) till sensorer och givare så är det inga problem så länge givarna själva är digitala. Strömbrytare, reläer
Ett urval D/A- och A/D-omvandlare Om man vill ansluta en mikrodator (eller annan digital krets) till sensorer och givare så är det inga problem så länge givarna själva är digitala. Strömbrytare, reläer
Digitala projekt. Henrik Lundstedt Gustav Darpö
 Digitala projekt Henrik Lundstedt d02hl@efd.lth.se Gustav Darpö d02gd@efd.lth.se 2006-05-22 Abstract Our goal with this project was to build a robot, capable of avoiding obstacles which intersects its
Digitala projekt Henrik Lundstedt d02hl@efd.lth.se Gustav Darpö d02gd@efd.lth.se 2006-05-22 Abstract Our goal with this project was to build a robot, capable of avoiding obstacles which intersects its
High Core Remote Car X8000 Cool
 High Core Remote Car X8000 Cool Ett projekt i kursen Digitala projekt EITF11 Grupp 13 Niklas Ohlsson Anna Rengstedt Per Vingå Handledare: Bertil Lindvall Abstract: This project was made when taking the
High Core Remote Car X8000 Cool Ett projekt i kursen Digitala projekt EITF11 Grupp 13 Niklas Ohlsson Anna Rengstedt Per Vingå Handledare: Bertil Lindvall Abstract: This project was made when taking the
Innehåll. 1 Inledning 3
 Digitala projekt Tomas Bjerre D04 d04tb@student.lth.se Gustav Reiz D04 d04gr@student.lth.se Roger Schildmeijer D04 d04rp@student.lth.se 26 februari 2008 1 Innehåll 1 Inledning 3 2 Utrustning 3 2.1 ATMega16...............................
Digitala projekt Tomas Bjerre D04 d04tb@student.lth.se Gustav Reiz D04 d04gr@student.lth.se Roger Schildmeijer D04 d04rp@student.lth.se 26 februari 2008 1 Innehåll 1 Inledning 3 2 Utrustning 3 2.1 ATMega16...............................
The Phenomenal Doorbell Bilaga 2. Källkod
 The Phenomenal Doorbell Bilaga 2. Källkod #include #include #include //Variabler int flag = 0; int count = 0; int timevect[8]; int bellbutton = 0; int waitbutton
The Phenomenal Doorbell Bilaga 2. Källkod #include #include #include //Variabler int flag = 0; int count = 0; int timevect[8]; int bellbutton = 0; int waitbutton
Digitala Projekt (EITF11) Hemlarm
 Hemlarm") Digitala Projekt (EITF11) Hemlarm Karl Nordenstorm, I-12, gem12kno 2014-05-16 Handledare: Bertil Lindvall Sammanfattning Den här rapporten beskriver arbetet bakom hur en prototyp för ett hemlarm har utvecklats
Digitala Projekt (EITF11) Hemlarm Karl Nordenstorm, I-12, gem12kno 2014-05-16 Handledare: Bertil Lindvall Sammanfattning Den här rapporten beskriver arbetet bakom hur en prototyp för ett hemlarm har utvecklats
TETRIS. LTH, Campus Helsingborg EITA15 Digitala System
 TETRIS LTH, Campus Helsingborg EITA15 Digitala System Handledare: Bertil Lindvall Författare: Isak Shamun, Viktor Kulle, Mark Slipac och Dennis Järnåsen Datum: 2019-05-09 Abstract This report concerns
TETRIS LTH, Campus Helsingborg EITA15 Digitala System Handledare: Bertil Lindvall Författare: Isak Shamun, Viktor Kulle, Mark Slipac och Dennis Järnåsen Datum: 2019-05-09 Abstract This report concerns
Robotfotboll med Arduino
 Robotfotboll med Arduino Av Staffan Melin och Martin Blom Bild & form-skolan, Masthugget, Göteborg 2015 Staffan Melin, staffan.melin@oscillator.se Martin Blom, martinblomblom@hotmail.com Detta verk är
Robotfotboll med Arduino Av Staffan Melin och Martin Blom Bild & form-skolan, Masthugget, Göteborg 2015 Staffan Melin, staffan.melin@oscillator.se Martin Blom, martinblomblom@hotmail.com Detta verk är
Roboten. Sida 1 av 11
 EV3 ipad Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
EV3 ipad Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
Digitalt Projekt: Radiostyrd Bil
 Digitala Projekt EITF11 Digitalt Projekt: Radiostyrd Bil Elektro- och informationsteknik, Lunds Tekniska Högskola och Handledare: Bertil Lindvall 2015-05-20 1 Digitala Projekt EITF11 Abstract This project
Digitala Projekt EITF11 Digitalt Projekt: Radiostyrd Bil Elektro- och informationsteknik, Lunds Tekniska Högskola och Handledare: Bertil Lindvall 2015-05-20 1 Digitala Projekt EITF11 Abstract This project
AVR 3 - datorteknik. Avbrott. Digitala system 15 hp. Förberedelser
 Namn: Laborationen godkänd: Digitala system 15 hp AVR 3 - datorteknik LTH Ingenjörshögskolan vid Campus Helsingborg Avbrott. Syften med den här laborationen är att introducera avbrott. Avbrott som uppkommer
Namn: Laborationen godkänd: Digitala system 15 hp AVR 3 - datorteknik LTH Ingenjörshögskolan vid Campus Helsingborg Avbrott. Syften med den här laborationen är att introducera avbrott. Avbrott som uppkommer
EDI021 Digitala projekt. Rapport LARMSYSTEM. Utförd av: Niklas Eklund E03 David Olsson E04. Inlämnad:
 EDI021 Digitala projekt Rapport LARMSYSTEM Utförd av: Niklas Eklund E03 David Olsson E04 Handledare: Bertil Lindvall Inlämnad: 2007-12-04 1 Abstract The market for security devices, both for consumers
EDI021 Digitala projekt Rapport LARMSYSTEM Utförd av: Niklas Eklund E03 David Olsson E04 Handledare: Bertil Lindvall Inlämnad: 2007-12-04 1 Abstract The market for security devices, both for consumers
Rafiki Wa Kupanda. EITF11, Digitala projekt VT18. Linnea Håkansson, Anton Gunneberg, Ruben Schultz
 Rafiki Wa Kupanda EITF11, Digitala projekt VT18 Linnea Håkansson, Anton Gunneberg, Ruben Schultz Lunds Tekniska Högskola Institutionen för elektro- och informationsteknik Handledare: Bertil Lindvall och
Rafiki Wa Kupanda EITF11, Digitala projekt VT18 Linnea Håkansson, Anton Gunneberg, Ruben Schultz Lunds Tekniska Högskola Institutionen för elektro- och informationsteknik Handledare: Bertil Lindvall och
1 Bakgrund 4. 2 Kravspecifikation Definitioner Grundläggande krav Användarfall 5
 Larmanläggning Tor Berglund Sebastian Svensson Bromert Projektarbete inom Digitala Projekt EITF11 Institutionen för elektro- och informationsteknik Handledare: Bertil Lindvall 2017-05-20 Abstract In the
Larmanläggning Tor Berglund Sebastian Svensson Bromert Projektarbete inom Digitala Projekt EITF11 Institutionen för elektro- och informationsteknik Handledare: Bertil Lindvall 2017-05-20 Abstract In the
Projektrapport Målgång
 Projektrapport Målgång Lunds Tekniska Högskola EITF11 Digitala Projekt 2016-05-23 Grupp 3 Författare: Albert Johansson Ludvig Brisby Jeppsson Mattias Hamberg Handledare: Bertil Lindvall 1 Inledning...
Projektrapport Målgång Lunds Tekniska Högskola EITF11 Digitala Projekt 2016-05-23 Grupp 3 Författare: Albert Johansson Ludvig Brisby Jeppsson Mattias Hamberg Handledare: Bertil Lindvall 1 Inledning...
Digitalteknik: CoolRunner-II CPLD Starter Kit Med kommentarer för kursen ht 2012
 Med kommentarer för kursen ht 2012 2012 CR:1 CoolRunner-II CPLD Starter Kit är ett litet utvecklingssystem för Xilinx-kretsen XC2C256. Utvecklingskortet kommer från företaget Digilent. Vid laborationerna
Med kommentarer för kursen ht 2012 2012 CR:1 CoolRunner-II CPLD Starter Kit är ett litet utvecklingssystem för Xilinx-kretsen XC2C256. Utvecklingskortet kommer från företaget Digilent. Vid laborationerna
Rapport Digitala Projekt EITF Grupp 12 Elin Blomstergren, Victor Sundgren Handledare: Bertil Lindvall. Fyra i rad
 Fyra i rad Sammanfattning Detta dokument behandlar ett projekt genomfört i kursen Digitala Projekt vid Lunds Tekniska högskola. Syftet med det projekt som avhandlas i denna rapport var att sammanställa
Fyra i rad Sammanfattning Detta dokument behandlar ett projekt genomfört i kursen Digitala Projekt vid Lunds Tekniska högskola. Syftet med det projekt som avhandlas i denna rapport var att sammanställa
DANCING ROBOT. EITF11, Grupp 10. Kajsa Salomonsson, Hugo Hedin och Petter Mårtensson
 DANCING ROBOT EITF11, Grupp 10 Kajsa Salomonsson, Hugo Hedin och Petter Mårtensson Abstract As part of the course Digital Projects EITF11 at the Faculty of Engineering, Lund University, a prototype of
DANCING ROBOT EITF11, Grupp 10 Kajsa Salomonsson, Hugo Hedin och Petter Mårtensson Abstract As part of the course Digital Projects EITF11 at the Faculty of Engineering, Lund University, a prototype of
Avståndsmätare. Digitala System EITA Grupp 7. Abdelsalem Yabrag, Abdulhadi kikar, Fredrik Peterson, Jesper Annefors
 Avståndsmätare Digitala System EITA15 2019-05-21 Grupp 7 Abdelsalem Yabrag, Abdulhadi kikar, Fredrik Peterson, Jesper Annefors Handledare: Bertil Lindvall, Lars-Göran Larsson Abstract There are some situations
Avståndsmätare Digitala System EITA15 2019-05-21 Grupp 7 Abdelsalem Yabrag, Abdulhadi kikar, Fredrik Peterson, Jesper Annefors Handledare: Bertil Lindvall, Lars-Göran Larsson Abstract There are some situations
Digitala System Projekt - EITA15 VT *SUPER DUPER KLOCKAN*
 Digitala System Projekt - EITA15 VT - 2019 *SUPER DUPER KLOCKAN* Handledare: Bertil Lindvall Studenter: NamWan Chansaeng Janne Stojovski Joakim Svensson Daniel Löfgren Abstract The goal of this project
Digitala System Projekt - EITA15 VT - 2019 *SUPER DUPER KLOCKAN* Handledare: Bertil Lindvall Studenter: NamWan Chansaeng Janne Stojovski Joakim Svensson Daniel Löfgren Abstract The goal of this project
Liftmaestro. Lunds Tekniska Högskola Elektro- och informationsteknik. Olle Gemfors, I13 Dayanand Sagar, I13 Mattias Wendler, I13
 Lunds Tekniska Högskola Elektro- och informationsteknik Liftmaestro Olle Gemfors, I13 Dayanand Sagar, I13 Mattias Wendler, I13 Handledare: Andreas Johansson, Bertil Lindvall 2016-05-20 Projektarbete, EITF11
Lunds Tekniska Högskola Elektro- och informationsteknik Liftmaestro Olle Gemfors, I13 Dayanand Sagar, I13 Mattias Wendler, I13 Handledare: Andreas Johansson, Bertil Lindvall 2016-05-20 Projektarbete, EITF11
Musen. Författare: Joel Guedj e02jg Erik Dahlbäck e02ed. Handledare: Bertil Lindvall. Digitala Projekt SK 2005
 Musen Digitala Projekt SK 2005 Författare: e02jg e02ed Handledare: Bertil Lindvall Innehåll Innehåll... 2 Inledning... 3 Mål... 3 Överblick... 3 Planering... 4 Styrning... 4 Kaross... 4 Positionering...
Musen Digitala Projekt SK 2005 Författare: e02jg e02ed Handledare: Bertil Lindvall Innehåll Innehåll... 2 Inledning... 3 Mål... 3 Överblick... 3 Planering... 4 Styrning... 4 Kaross... 4 Positionering...
Digitalt eller Analogt
 Digitalt eller Analogt digitalt: q 0 255 q 7 q 6 q 5 q 4 q 3 q 2 q 1 q 0 1 ½ ¼ 1/8 1/16 1/32 1/64 1/128 eller analogt? q Digital style Old school Digital Analogomvandlare? b 7 b 6 b 5 b 4 b 3 b 2 b 1 b
Digitalt eller Analogt digitalt: q 0 255 q 7 q 6 q 5 q 4 q 3 q 2 q 1 q 0 1 ½ ¼ 1/8 1/16 1/32 1/64 1/128 eller analogt? q Digital style Old school Digital Analogomvandlare? b 7 b 6 b 5 b 4 b 3 b 2 b 1 b
Elektro och Informationsteknik LTH. Laboration 6 A/D- och D/A-omvandling. Elektronik för D ETIA01
 Elektro och Informationsteknik LTH Laboration 6 A/D- och D/A-omvandling Elektronik för D ETIA01 Peter Hammarberg Anders J Johansson Lund April 2008 Mål Efter laborationen skall du ha studerat följande:
Elektro och Informationsteknik LTH Laboration 6 A/D- och D/A-omvandling Elektronik för D ETIA01 Peter Hammarberg Anders J Johansson Lund April 2008 Mål Efter laborationen skall du ha studerat följande:
INNEHÅLLSFÖRTECKNING... 2 FÖRORD... 3 INLEDNING... 4 ATT ANVÄNDA MOTORERNA... 9 LOOP (UPPREPANDE) FUNKTIONEN... 10 SKAPA EN EGEN KLOSS...
 FUNKTIONEN... 10 SKAPA EN EGEN KLOSS...") GRUNDKURS INNEHÅLLSFÖRTECKNING INNEHÅLLSFÖRTECKNING... 2 FÖRORD... 3 INLEDNING... 4 SKÄRMUPPBYGGNAD... 4 ROBOT EDUCATOR... 5 PROGRAMMERINGSRUTAN... 5 KNAPPARNA OCH KLOSSARNA... 6 UPPGIFTER... 8 ATT ANVÄNDA
GRUNDKURS INNEHÅLLSFÖRTECKNING INNEHÅLLSFÖRTECKNING... 2 FÖRORD... 3 INLEDNING... 4 SKÄRMUPPBYGGNAD... 4 ROBOT EDUCATOR... 5 PROGRAMMERINGSRUTAN... 5 KNAPPARNA OCH KLOSSARNA... 6 UPPGIFTER... 8 ATT ANVÄNDA
Väderstation. Digitala Projekt EITF11 Institutionen för Elektro- och Informationsteknik Lunds Tekniska Högskola
 Väderstation Anna Kjölstad Svedu och Emma Sikander, I09 The overall purpose of this project was to gain further knowledge of the making of digital devices, including the complexity of the process as well
Väderstation Anna Kjölstad Svedu och Emma Sikander, I09 The overall purpose of this project was to gain further knowledge of the making of digital devices, including the complexity of the process as well
Rapportsammanfattning. Optima Sous Vide
 Rapportsammanfattning Optima Sous Vide Elektro- och informationsteknik, Lunds Tekniska Högskola Anton Bengtsson, Hannes Helin, Ingrid Hyltander Handledare: Bertil Lindvall 2017-05-20 Abstract The following
Rapportsammanfattning Optima Sous Vide Elektro- och informationsteknik, Lunds Tekniska Högskola Anton Bengtsson, Hannes Helin, Ingrid Hyltander Handledare: Bertil Lindvall 2017-05-20 Abstract The following
EV3 Roboten. Sida 1 av 13
 EV3 Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
EV3 Roboten Fyra output portar A,B,C och D(motorer) Fyra input portar 1,2,3 och 4 (sensorer) USB, Bluetooth, eller Wi-Fi koppling 16 MB flash minne 64 MB RAM SD Card Port: 32 GB Flera inbyggda verktyg
Servicemanual. Autonomous Pallet System 800 Prototyp. Utfärdat: 2008-05-14
 Servicemanual Autonomous Pallet System 800 Prototyp Utfärdat: 2008-05-14 Servicemanual APS800 1. NIOS II... 3 1.1 Koppla till NIOS II... 3 1.2 Kopplingar till batteri...3 1.3 Utökad spänningsgren...4 1.4
Servicemanual Autonomous Pallet System 800 Prototyp Utfärdat: 2008-05-14 Servicemanual APS800 1. NIOS II... 3 1.1 Koppla till NIOS II... 3 1.2 Kopplingar till batteri...3 1.3 Utökad spänningsgren...4 1.4
Projekt EITA15. Väckarklocka. LTH Ingenjörshögskolan vid Campus Helsingborg Datateknik
 Projekt Väckarklocka LTH Ingenjörshögskolan vid Campus Helsingborg Datateknik Grupp:, och Handledare: Bertil Lindvall och Lars Göran Larsson Kurs: EITA 15 Lunds Tekniska Högskola Datum: 2019-05-21 Sammanfattning
Projekt Väckarklocka LTH Ingenjörshögskolan vid Campus Helsingborg Datateknik Grupp:, och Handledare: Bertil Lindvall och Lars Göran Larsson Kurs: EITA 15 Lunds Tekniska Högskola Datum: 2019-05-21 Sammanfattning
Lunds Tekniska Högskola EITF11 Digitala projekt. Bandspelaren
 Lunds Tekniska Högskola EITF11 Digitala projekt Bandspelaren Johan Hansson & Cecilia Skoglund 22 maj 2017 Abstract This is a report describing the work process, hardware, software and results of a project
Lunds Tekniska Högskola EITF11 Digitala projekt Bandspelaren Johan Hansson & Cecilia Skoglund 22 maj 2017 Abstract This is a report describing the work process, hardware, software and results of a project
Projektrapport - RoboWalter
 Projektrapport - RoboWalter Projektarbete i kursen Digitala System (EITA15) vid Lunds Tekniska Högskola (LTH) Grupp 1: Angelika Larsson, Oscar Persson, Albin Andersson och Fanny Zolotarevskaia Handledare:
Projektrapport - RoboWalter Projektarbete i kursen Digitala System (EITA15) vid Lunds Tekniska Högskola (LTH) Grupp 1: Angelika Larsson, Oscar Persson, Albin Andersson och Fanny Zolotarevskaia Handledare:
LUNDS TEKNISKA HÖGSKOLA. Väderstation. Digitala Projekt, EITF11. Martin Olofsson, I08 & Fredrik Oher, I08 Vt 2012
 LUNDS TEKNISKA HÖGSKOLA Väderstation Digitala Projekt, EITF11 Martin Olofsson, I08 & Fredrik Oher, I08 Vt 2012 The aim of this course Digital Projects was to plan, construct and program an electrical device,
LUNDS TEKNISKA HÖGSKOLA Väderstation Digitala Projekt, EITF11 Martin Olofsson, I08 & Fredrik Oher, I08 Vt 2012 The aim of this course Digital Projects was to plan, construct and program an electrical device,
General Purpose registers ALU I T H S V N Z C SREG. Antag att vi behöver skriva in talet 25 till register R18
 F3 Föreläsning i Mikrodatorteknink 2006-08-29 Kärnan i microcontrollern består av ett antal register och en ALU. Till detta kommer också ett antal portar. Det finns 64 st portar. Några är anslutna mot
F3 Föreläsning i Mikrodatorteknink 2006-08-29 Kärnan i microcontrollern består av ett antal register och en ALU. Till detta kommer också ett antal portar. Det finns 64 st portar. Några är anslutna mot
#include <avr/io.h> #include <avr/interrupt.h> #include <util/delay.h> unsigned char num;
 #include #include #include unsigned char num; int count = 0; // antal i lokalen char larmtriggered = 0; //om larmet är utlöst char larmactivated = 0; //om larmet
#include #include #include unsigned char num; int count = 0; // antal i lokalen char larmtriggered = 0; //om larmet är utlöst char larmactivated = 0; //om larmet
Digital Projekt EDI 021 Konstruktion av talande nummerpresentatör VT1 2004
 Digital Projekt EDI 021 Konstruktion av talande nummerpresentatör VT1 2004 Erik Brattkull E99 Björn Hilliges E02 INLEDNING 3 Bakgrund 3 Kravspecifikation 3 GENOMFÖRANDE 4 Teoretisk modell 4 Praktisk modell
Digital Projekt EDI 021 Konstruktion av talande nummerpresentatör VT1 2004 Erik Brattkull E99 Björn Hilliges E02 INLEDNING 3 Bakgrund 3 Kravspecifikation 3 GENOMFÖRANDE 4 Teoretisk modell 4 Praktisk modell
PROJEKTTYP: Rapportsammanfattning STUDENTER: Larsson, J. ( ) och Oredsson, J. ( ) DATUM: 26 april, 2015
 och Oredsson, J. ( ) DATUM: 26 april, 2015") Rapport Aquacell SKOLA: Lunds Tekniska Högskola INSTITUTION: Elektro- och informationsteknik KURS: Digitala projekt (EITF11) KURSANSVARIG: Bertil Lindvall PROJEKTTYP: Rapportsammanfattning STUDENTER: DATUM:
Rapport Aquacell SKOLA: Lunds Tekniska Högskola INSTITUTION: Elektro- och informationsteknik KURS: Digitala projekt (EITF11) KURSANSVARIG: Bertil Lindvall PROJEKTTYP: Rapportsammanfattning STUDENTER: DATUM:
Goda råd till de som ska utföra ett liknande projekt (från KMM 2016)
") Goda råd till de som ska utföra ett liknande projekt (från KMM 2016) Snöa inte er på lösningar som kanske fungerar, eller som ni bara vill få fungera. Var realistiska och våga byt lösning om den det verkar
Goda råd till de som ska utföra ett liknande projekt (från KMM 2016) Snöa inte er på lösningar som kanske fungerar, eller som ni bara vill få fungera. Var realistiska och våga byt lösning om den det verkar
Digitalteknik: CoolRunner-II CPLD Starter Kit
 CR:1 CoolRunner-II CPLD Starter Kit är ett litet utvecklingssystem för Xilinx-kretsen XC2C256. Utvecklingskortet kommer från företaget Digilent. Vid laborationerna i digitalteknik kommer kortet att användas
CR:1 CoolRunner-II CPLD Starter Kit är ett litet utvecklingssystem för Xilinx-kretsen XC2C256. Utvecklingskortet kommer från företaget Digilent. Vid laborationerna i digitalteknik kommer kortet att användas
Disposition av prototypkort
 Mekinstruktioner Disposition av prototypkort För att undvika att prototypkortet inte får plats eller att man måste löda om en massa sladdar är det viktigt att man kollar innan att allt får plats på kortet
Mekinstruktioner Disposition av prototypkort För att undvika att prototypkortet inte får plats eller att man måste löda om en massa sladdar är det viktigt att man kollar innan att allt får plats på kortet
Accelerometer. Rikard Ekström Mattias Kindborg. Informationsteknologi Lunds Universitet
 Accelerometer Rikard Ekström Mattias Kindborg Informationsteknologi Lunds Universitet Handledare: Bertil Larsson 7 december, 4 INNEHÅLLSFÖRECKNING SEKION SIDNUMMER ABSRAC 1 INRODUKION EORI 3 ACCELEROMEERN
Accelerometer Rikard Ekström Mattias Kindborg Informationsteknologi Lunds Universitet Handledare: Bertil Larsson 7 december, 4 INNEHÅLLSFÖRECKNING SEKION SIDNUMMER ABSRAC 1 INRODUKION EORI 3 ACCELEROMEERN
Design av inbyggda system
 Design av inbyggda system Innehåll Hårdvarunära design Erfarenhet/Utmaningar värda att tänka på Avbrottsrutiner och huvudloopar hantering av gemensamma data Kopplingsschema hur och varför Designspecar
Design av inbyggda system Innehåll Hårdvarunära design Erfarenhet/Utmaningar värda att tänka på Avbrottsrutiner och huvudloopar hantering av gemensamma data Kopplingsschema hur och varför Designspecar
Design av inbyggda system
 Design av inbyggda system Innehåll Hårdvarunära design Erfarenhet värd att tänka på Avbrottsrutiner och huvudloopar hantering av gemensamma data Kopplingsschema hur och varför Designspecar bra / dåligt
Design av inbyggda system Innehåll Hårdvarunära design Erfarenhet värd att tänka på Avbrottsrutiner och huvudloopar hantering av gemensamma data Kopplingsschema hur och varför Designspecar bra / dåligt
Institutionen för informationsteknologi
 Institutionen för informationsteknologi Projektarbete Självgående robot Tomas Nilsson Fredrik Persson 2006-05-15 Abstract This report is written as a part of the course Digitala Projekt SK given at the
Institutionen för informationsteknologi Projektarbete Självgående robot Tomas Nilsson Fredrik Persson 2006-05-15 Abstract This report is written as a part of the course Digitala Projekt SK given at the
Helena Harrysson och Linnéa Wickberg
 Snake Ett klassiskt spel i ny tappning Helena Harrysson och Linnéa Wickberg 2013-05-20 Handledare Bertil Lindvall Abstract The course Digitala Projekt, EITF11, focuses on the process of constructing a
Snake Ett klassiskt spel i ny tappning Helena Harrysson och Linnéa Wickberg 2013-05-20 Handledare Bertil Lindvall Abstract The course Digitala Projekt, EITF11, focuses on the process of constructing a
Laborationskort - ML4
 microlf ML Laborationskort - ML ML är ett enkelt laborationskort avsett för inledande laborationsövningar i Datorteknik. Kortet innehåller 0 olika sektioner som enkelt kopplas samman via 0-polig flatkabel.
microlf ML Laborationskort - ML ML är ett enkelt laborationskort avsett för inledande laborationsövningar i Datorteknik. Kortet innehåller 0 olika sektioner som enkelt kopplas samman via 0-polig flatkabel.
Department of Information Technology Digitala projekt. SuperKull. Daniel Öhman Alexander Persson
 Department of Information Technology Digitala projekt SuperKull Daniel Öhman Alexander Persson Abstract The purpose of this course was to design and construct an electronic
Department of Information Technology Digitala projekt SuperKull Daniel Öhman Alexander Persson Abstract The purpose of this course was to design and construct an electronic