EL1000/1120/1110 Reglerteknik AK
|
|
|
- Rasmus Eriksson
- för 8 år sedan
- Visningar:
Transkript

1 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 6: Kompensering (forts.), robusthet och känslighet

2 Kursinfo: Extra material Introduktion till Laplacetransformen: 4e9/laplace3.pdf Extra material om Nyquistkriteriet: 6/Nyquistkriteriet.pdf Repetition av komplexa tal: 012/komplexatal.pdf

3 Kursinfo: Lab2 Lab2 betydligt mer krävande än Lab1. Noggranna förberedelser nödvändiga 1. Gör förberedelseuppgifter i labpek 2. Gå in på Bilda och testa så du kan lösa övningsskrivningarna För att få göra Lab2 krävs att du klarar minst 4 av 5 slumpade frågor från övningsskrivningarna (på c:a 5 minuter, utan hjälpmedel)

4 Kursinfo: Lab3 Anmälningssystemet till Lab3 under bilda.kth.se är aktiverat Denna labb ska redovisas i par! Se till så du anmäler dig till samma tillfälle som din labbpartner Ingen partner för Lab3? Använd kurshemsidan på KTH Social för att hittar partner!

5 Kursinfo: Tentan Meddelande från Hanna: Nu ligger anmälan för tentamen uppe på "Mina sidor". Det gäller den ordinarie tentan för Reglerteknik AK nu i period 2 och omtentan för period 1. Ni får välja vilket utav dessa tentamenstillfällen ni vill men det är endast tillåtet att anmäla sig till ett tillfälle.


 i Pasadena, Kalifornien, under sommaren 2015.")
6 SURF-student på Caltech? Summer Undergraduate Research Fellowships Vill du prova på att forska? Är du intresserad av reglerteknik? Är du ambitiös och initiativrik? Har du inget inplanerat nästa sommar? Är du nyfiken på Kalifornien? Systembiologi Regulatordesign Vi på avdelningen för reglerteknik vid skolan för elektro- och systemteknik har möjlighet att skicka 1-2 teknologer till California Institute of Technology ( i Pasadena, Kalifornien, under sommaren Verifierbara styrsystem Vi söker teknologer på KTH som är intresserade av forskning inom regler- och systemteknik, och vill spendera 10 veckor i en forskargrupp av högsta internationella klass. Anmäl intresse senast den 26 november Intresserad eller vill veta mer? Kontakta Henrik Sandberg (hsan@kth.se) people.kth.se/~hsan/surf.html
 i Pasadena, Kalifornien, under sommaren 2015.")
7 Dagens program Stabilitetsmarginaler, specifikation av prestanda i tids- och frekvensplanet (repetition, slides) Kompensering (forts., slides) Icke-minfassystem (tavlan) Robusthet Stabilitet trots modellfel (tavlan) Känslighet Reglerprestanda trots störningar (tavlan)
 Känslighet Reglerprestanda trots störningar")
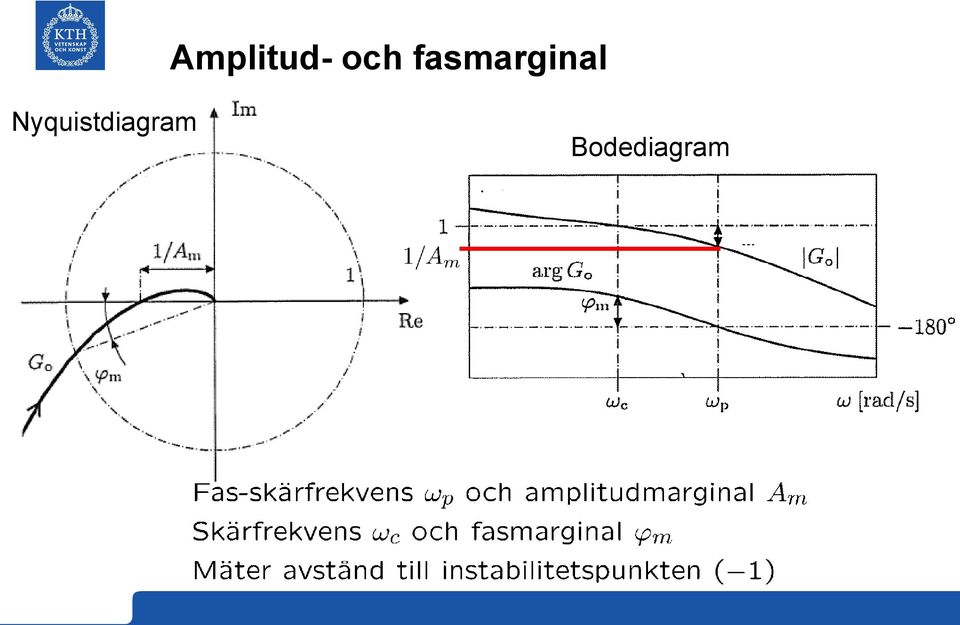
8 Amplitud- och fasmarginal Nyquistdiagram Bodediagram
9 Specifikationer för slutna systemet I tidsplanet: Snabbhet Dämpning Statiskt fel

10 Specifikationer för slutna systemet I frekvensplanet Snabbhet: Bandbredd Dämpning: Resonanstopp Statiskt fel:

11 Motsvarande specifikationer för öppna systemet I frekvensplanet Snabbhet: Skärfrekvens Dämpning: Fasmarginal Statiskt förstärkning:

12 Specifikationer för kompensering av Krav på: I. Snabbhet II. Dämpning III. Statiskt fel (stegsvar) III. I. II.
 III.")
13 Kompensering Typisk kompenseringslänk: Idé: Använd för att forma kretsförstärkningen så att den uppfyller krav på: Skärfrekvens Fasmarginal Statiskt förstärkning OBS! ger PID-regulator

14 I+II: Kompensering med PD-länk Fördel: positivt fasbidrag (faslyft) Nackdel: Stor förstärkning vid höga frekvenser

15 Maximalt faslyft beror på 1. Bestäm så att fasökning blir tillräckligt stor 2. Bestäm så att 3. Bestäm så att

16 Exempel (I+II): PD-länk Specifikation: Gör slutna systemet dubbelt så snabbt och bibehåll dämpning Översatt på öppna systemet: Dubbla och bibehåll

17 Att välj en PD-länk 1. vid. vid. Öka fasen med 2. 3.

18 Exempel (I+II): Validering Specifikation: Gör slutna systemet dubbelt så snabbt och bibehåll dämpning Översatt på öppna systemet: Dubbla och bibehåll

19 III: Kompensering med lag-länk Fördel: Ger stor lågfrekvent förstärkning. Minskar statiskt fel med ungefär (se övning för exakt analys) Nackdel: Minskar fasmarginalen. Välj tillräckligt stort (tumregel: Välj så minskar fasen med )
 Nackdel: Minskar fasmarginalen.")
20 Icke-minfassystem (Nytt för idag) Anta stabil och Minfassystem: systemets asymptotiska fas proportionell mot asymptotiska amplitudkurvans lutning i log-log-diagram Icke-minfassystem: Icke-minfas orsakas av nollställen i komplexa högra halvplanet (HHP) och tidsfördröjningar
")
21 Betydelse av nollställe för stegsvar
22 Betydelse av nollställe för stegsvar Begynnelsevärdesteoremet ger: Nollställe i HHP Stegsvar går initialt åt fel håll
23 Quiz
24 Quiz
25 Quiz
EL1000/1120 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 6: Kompensering (forts.), robusthet och känslighet Kursinfo: Lab2 Lab2 betydligt mer krävande än Lab1. Noggranna förberedelser
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 6: Kompensering (forts.), robusthet och känslighet Kursinfo: Lab2 Lab2 betydligt mer krävande än Lab1. Noggranna förberedelser
EL1010 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1010 Reglerteknik AK Föreläsning 6: Kompensering (forts.), robusthet och känslighet Kursinfo Repetition av komplexa tal: https://www.kth.se/social/upload/4fce1a4df276543a98000012/
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1010 Reglerteknik AK Föreläsning 6: Kompensering (forts.), robusthet och känslighet Kursinfo Repetition av komplexa tal: https://www.kth.se/social/upload/4fce1a4df276543a98000012/
EL1000/1120/1110 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 12: Sammanfattning Kursinfo: Resterande räknestugor 141208, 10-12 Q24 141210, 10-12 L21 141215, 10-12 Q34 141215, 13-15 Q11
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 12: Sammanfattning Kursinfo: Resterande räknestugor 141208, 10-12 Q24 141210, 10-12 L21 141215, 10-12 Q34 141215, 13-15 Q11
Reglerteknik AK, Period 2, 2013 Föreläsning 6. Jonas Mårtensson, kursansvarig
 Reglerteknik AK, Period 2, 213 Föreläsning 6 Jonas Mårtensson, kursansvarig Senaste två föreläsningarna Frekvensbeskrivning, Bodediagram Stabilitetsmarginaler Specifikationer (tids-/frekvensplan, slutna/öppna
Reglerteknik AK, Period 2, 213 Föreläsning 6 Jonas Mårtensson, kursansvarig Senaste två föreläsningarna Frekvensbeskrivning, Bodediagram Stabilitetsmarginaler Specifikationer (tids-/frekvensplan, slutna/öppna
EL1000/1120 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Tentamen Ordinarie tentamenstillfälle är fredagen den 15/1 kl.14.00-19.00 Obligatorisk föranmälan
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Tentamen Ordinarie tentamenstillfälle är fredagen den 15/1 kl.14.00-19.00 Obligatorisk föranmälan
EL1000/1120 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 10: Regulatorstrukturer Tips inför Lab2 och Lab3 Förstärkning anges ofta i decibel (db) i Matlab: Flera av övningarna är till stor
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Föreläsning 10: Regulatorstrukturer Tips inför Lab2 och Lab3 Förstärkning anges ofta i decibel (db) i Matlab: Flera av övningarna är till stor
EL1010 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1010 Reglerteknik AK Föreläsning 10: Regulatorstrukturer Kursinfo: Tentamen EL1010 Ordinarie tentamenstillfälle EL1010 är måndagen den 16/1 kl. 8.00-13.00 Obligatorisk
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1010 Reglerteknik AK Föreläsning 10: Regulatorstrukturer Kursinfo: Tentamen EL1010 Ordinarie tentamenstillfälle EL1010 är måndagen den 16/1 kl. 8.00-13.00 Obligatorisk
Nyquistkriteriet, kretsformning
 Sammanfattning från föreläsning 5 2 Reglerteknik I: Föreläsning 6 Nyquistkriteriet, kretsformning Fredrik Lindsten fredrik.lindsten@it.uu.se Kontor 2236, ITC Hus 2, Systemteknik Institutionen för informationsteknologi
Sammanfattning från föreläsning 5 2 Reglerteknik I: Föreläsning 6 Nyquistkriteriet, kretsformning Fredrik Lindsten fredrik.lindsten@it.uu.se Kontor 2236, ITC Hus 2, Systemteknik Institutionen för informationsteknologi
TSIU61: Reglerteknik. Sammanfattning från föreläsning 5 (2/4) Stabilitet Specifikationer med frekvensbeskrivning
 Stabilitet Specifikationer med frekvensbeskrivning") TSIU6 Föreläsning 6 Gustaf Hendeby HT 206 / 7 Innehåll föreläsning 6 TSIU6: Reglerteknik Föreläsning 6 Stabilitet Specifikationer med frekvensbeskrivning Gustaf Hendeby ˆ Sammanfattning av föreläsning
TSIU6 Föreläsning 6 Gustaf Hendeby HT 206 / 7 Innehåll föreläsning 6 TSIU6: Reglerteknik Föreläsning 6 Stabilitet Specifikationer med frekvensbeskrivning Gustaf Hendeby ˆ Sammanfattning av föreläsning
Kretsformning och känslighet
 Innehåll föreläsning 7 2 Reglerteknik, föreläsning 7 Kretsformning och känslighet Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Innehåll föreläsning 7 2 Reglerteknik, föreläsning 7 Kretsformning och känslighet Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Välkomna till TSRT19 Reglerteknik M Föreläsning 8
 Välkomna till TSRT19 Reglerteknik M Föreläsning 8 Sammanfattning av föreläsning 7 Kretsformning Lead-lag design Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet) Sammanfattning av förra
Välkomna till TSRT19 Reglerteknik M Föreläsning 8 Sammanfattning av föreläsning 7 Kretsformning Lead-lag design Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet) Sammanfattning av förra
Välkomna till TSRT19 Reglerteknik Föreläsning 7
 Välkomna till TSRT19 Reglerteknik Föreläsning 7 Sammanfattning av föreläsning 6 Kretsformning Lead-lag design Labförberedande exempel Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet)
Välkomna till TSRT19 Reglerteknik Föreläsning 7 Sammanfattning av föreläsning 6 Kretsformning Lead-lag design Labförberedande exempel Instabila nollställen och tidsfördröjning (tolkning i frekvensplanet)
EL1000/1120/1110 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Administration För frågor kring Bilda, labbanmälan, kurshemsida, etc.: kontakta Anneli Ström
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Föreläsning 11: Implementering Kursinfo: Administration För frågor kring Bilda, labbanmälan, kurshemsida, etc.: kontakta Anneli Ström
Föreläsning 3. Reglerteknik AK. c Bo Wahlberg. 9 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 3 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 9 september 2013 Introduktion Förra gången: PID-reglering Dagens program: Stabilitet Rotort
Föreläsning 3 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 9 september 2013 Introduktion Förra gången: PID-reglering Dagens program: Stabilitet Rotort
TSIU61: Reglerteknik. Regulatorsyntes mha bodediagram (1/4) Känslighet Robusthet. Sammanfattning av föreläsning 7
 Känslighet Robusthet. Sammanfattning av föreläsning 7") TSIU6 Föreläsning 8 Gustaf Hendeby HT 207 / 8 Innehåll föreläsning 8 TSIU6: Reglerteknik Föreläsning 8 Känslighet Robusthet Gustaf Hendeby ˆ Sammanfattning av föreläsning 7 ˆ Känslighet mot störningar
TSIU6 Föreläsning 8 Gustaf Hendeby HT 207 / 8 Innehåll föreläsning 8 TSIU6: Reglerteknik Föreläsning 8 Känslighet Robusthet Gustaf Hendeby ˆ Sammanfattning av föreläsning 7 ˆ Känslighet mot störningar
TSRT91 Reglerteknik: Föreläsning 9
 TSRT91 Reglerteknik: Föreläsning 9 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 20 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT91 Reglerteknik: Föreläsning 9 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 20 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Reglerteknik AK. Tentamen 24 oktober 2016 kl 8-13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 24 oktober 26 kl 8-3 Poängberäkning och betygsättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Nyquistkriteriet. Henrik Sandberg. Extra material till Reglerteknik AK 19 maj 2014
 Nyquistkriteriet Henrik Sandberg Extra material till Reglerteknik AK 19 maj 2014 Upplägg Harry Nyquist Frekvensanalys i sluten loop Nyquistkriteriet Exempel Argumentvariationsprincipen Harry Nyquist (1889-1976)
Nyquistkriteriet Henrik Sandberg Extra material till Reglerteknik AK 19 maj 2014 Upplägg Harry Nyquist Frekvensanalys i sluten loop Nyquistkriteriet Exempel Argumentvariationsprincipen Harry Nyquist (1889-1976)
Reglerteknik 6. Kapitel 10. Köp bok och övningshäfte på kårbokhandeln. William Sandqvist william@kth.se
 Reglerteknik 6 Kapitel Köp bok och övningshäfte på kårbokhandeln Föreläsning 6 kap Reglersystemets egenskaper Stabilitet är den viktigaste egenskapen. Ett ostabilt system är oanvändbart. Stabilitet är
Reglerteknik 6 Kapitel Köp bok och övningshäfte på kårbokhandeln Föreläsning 6 kap Reglersystemets egenskaper Stabilitet är den viktigaste egenskapen. Ett ostabilt system är oanvändbart. Stabilitet är
Välkomna till TSRT19 Reglerteknik Föreläsning 6. Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 6 Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden! Sammanfattning av förra föreläsningen 2 G(s) Sinus in (i stabilt system) ger sinus
Välkomna till TSRT19 Reglerteknik Föreläsning 6 Sammanfattning av föreläsning 5 Lite mer om Bodediagram Den röda tråden! Sammanfattning av förra föreläsningen 2 G(s) Sinus in (i stabilt system) ger sinus
Frekvensbeskrivning, Bodediagram
 Innehåll föreläsning 5 Reglerteknik I: Föreläsning 5 Frekvensbeskrivning, Bodediagram Fredrik Lindsten fredrik.lindsten@it.uu.se Kontor 2236, ITC Hus 2, Systemteknik Institutionen för informationsteknologi
Innehåll föreläsning 5 Reglerteknik I: Föreläsning 5 Frekvensbeskrivning, Bodediagram Fredrik Lindsten fredrik.lindsten@it.uu.se Kontor 2236, ITC Hus 2, Systemteknik Institutionen för informationsteknologi
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen , kl
 REGLERTEKNIK KTH REGLERTEKNIK AK EL/EL/EL2 Tentamen 2 2 4, kl. 4. 9. Hjälpmedel: Kursboken i glerteknik AK (Glad, Ljung: glerteknik eller motsvarande) räknetabeller, formelsamlingar och räknedosa. Observeraattövningsmaterial
REGLERTEKNIK KTH REGLERTEKNIK AK EL/EL/EL2 Tentamen 2 2 4, kl. 4. 9. Hjälpmedel: Kursboken i glerteknik AK (Glad, Ljung: glerteknik eller motsvarande) räknetabeller, formelsamlingar och räknedosa. Observeraattövningsmaterial
TSRT91 Reglerteknik: Föreläsning 5
 TSRT9 Reglerteknik: Föreläsning 5 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar / 23 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT9 Reglerteknik: Föreläsning 5 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar / 23 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Övningar i Reglerteknik
 Övningar i Reglerteknik Stabilitet hos återkopplade system Ett system är stabilt om utsignalen alltid är begränsad om insignalen är begränsad. Linjära tidsinvarianta system är stabila precis då alla poler
Övningar i Reglerteknik Stabilitet hos återkopplade system Ett system är stabilt om utsignalen alltid är begränsad om insignalen är begränsad. Linjära tidsinvarianta system är stabila precis då alla poler
EL1000/1120/1110 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120/1110 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
Välkomna till TSRT19 Reglerteknik Föreläsning 8. Sammanfattning av föreläsning 7 Framkoppling Den röda tråden!
 Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
Välkomna till TSRT19 Reglerteknik Föreläsning 8 Sammanfattning av föreläsning 7 Framkoppling Den röda tråden! Sammanfattning föreläsning 8 2 Σ F(s) Lead-lag design: Givet ett Bode-diagram för ett öppet
1RT490 Reglerteknik I 5hp Tentamen: Del A Tid: Torsdag 15 december 2016, kl
 Tentamenskod Klockslag för inlämning Utbildningsprogram Bordnummer 1RT490 Reglerteknik I 5hp Tentamen: Del A Tid: Torsdag 15 december 2016, kl. 8.00-11.00 Plats: Fyrislundsgatan 80, sal 1 Ansvarig lärare:
Tentamenskod Klockslag för inlämning Utbildningsprogram Bordnummer 1RT490 Reglerteknik I 5hp Tentamen: Del A Tid: Torsdag 15 december 2016, kl. 8.00-11.00 Plats: Fyrislundsgatan 80, sal 1 Ansvarig lärare:
Reglerteknik AK, Period 2, 2013 Föreläsning 12. Jonas Mårtensson, kursansvarig
 Reglerteknik AK, Period 2, 213 Föreläsning 12 Jonas Mårtensson, kursansvarig Sammanfattning Systembeskrivning Reglerproblemet Modellering Specifikationer Analysverktyg Reglerstrukturer Syntesmetoder Implementering
Reglerteknik AK, Period 2, 213 Föreläsning 12 Jonas Mårtensson, kursansvarig Sammanfattning Systembeskrivning Reglerproblemet Modellering Specifikationer Analysverktyg Reglerstrukturer Syntesmetoder Implementering
Frekvensbeskrivning, Bodediagram
 Innehåll föreläsning 5 Reglerteknik, föreläsning 5 Frekvensbeskrivning, Bodediagram Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Innehåll föreläsning 5 Reglerteknik, föreläsning 5 Frekvensbeskrivning, Bodediagram Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Fredrik Lindsten Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
") Innehåll föreläsning 12 2 Reglerteknik, föreläsning 12 Sammanfattning av kursen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Innehåll föreläsning 12 2 Reglerteknik, föreläsning 12 Sammanfattning av kursen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY) 1. Sammanfattning
Lead-lag-reglering. Fundera på till den här föreläsningen. Fasavancerande (lead-) länk. Ex. P-regulator. Vi vill ha en regulator som uppfyller:
 länk. Ex. P-regulator. Vi vill ha en regulator som uppfyller:") TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby Sammanfattning av föreläsning 6 Regulatorsyntes
TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby Sammanfattning av föreläsning 6 Regulatorsyntes
TSIU61: Reglerteknik. Lead-lag-regulatorn. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 ˆ Sammanfattning av
TSIU61: Reglerteknik Föreläsning 7 Lead-lag-regulatorn Tidsfördröjning Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 7 Gustaf Hendeby HT1 2017 1 / 24 Innehåll föreläsning 7 ˆ Sammanfattning av
Frekvenssvaret är utsignalen då insginalen är en sinusvåg med frekvens ω och amplitud A,
 Övning 8 Introduktion Varmt välkomna till åttonde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Frekvenssvar Frekvenssvaret är utsignalen då insginalen är en sinusvåg med frekvens
Övning 8 Introduktion Varmt välkomna till åttonde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Frekvenssvar Frekvenssvaret är utsignalen då insginalen är en sinusvåg med frekvens
TSIU61: Reglerteknik. Sammanfattning av kursen. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 12 Sammanfattning av kursen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 12 Gustaf Hendeby HT1 2017 1 / 56 Innehåll föreläsning 12: 1. Reglerproblemet 2. Modellbygge
TSIU61: Reglerteknik Föreläsning 12 Sammanfattning av kursen Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 12 Gustaf Hendeby HT1 2017 1 / 56 Innehåll föreläsning 12: 1. Reglerproblemet 2. Modellbygge
A
 Lunds Universitet LTH Ingenjorshogskolan i Helsingborg Tentamen i Reglerteknik 2008{05{29. Ett system beskrivs av foljande in-utsignalsamband: dar u(t) ar insignal och y(t) utsignal. d 2 y dt 2 + dy du
Lunds Universitet LTH Ingenjorshogskolan i Helsingborg Tentamen i Reglerteknik 2008{05{29. Ett system beskrivs av foljande in-utsignalsamband: dar u(t) ar insignal och y(t) utsignal. d 2 y dt 2 + dy du
TSIU61: Reglerteknik. Frekvensbeskrivning Bodediagram. Gustaf Hendeby.
 TSIU61: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 5 Gustaf Hendeby HT1 2017 1 / 1 Innehåll föreläsning 5 ˆ Sammanfattning av föreläsning
TSIU61: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby gustaf.hendeby@liu.se TSIU61 Föreläsning 5 Gustaf Hendeby HT1 2017 1 / 1 Innehåll föreläsning 5 ˆ Sammanfattning av föreläsning
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Kortfattade lösningsförslag till tentamen 2015 04 08, kl. 8.00 13.00
 REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL0 Kortfattade lösningsförslag till tentamen 05 04 08, kl. 8.00 3.00. (a) Signalen u har vinkelfrekvens ω = 0. rad/s, och vi läser av G(i0.) 35 och arg G(i0.)
REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL0 Kortfattade lösningsförslag till tentamen 05 04 08, kl. 8.00 3.00. (a) Signalen u har vinkelfrekvens ω = 0. rad/s, och vi läser av G(i0.) 35 och arg G(i0.)
Reglerteknik AK, FRT010
 Institutionen för REGLERTEKNIK Reglerteknik AK, FRT Tentamen januari 27 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Institutionen för REGLERTEKNIK Reglerteknik AK, FRT Tentamen januari 27 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt
Reglerteknik AK. Tentamen 9 maj 2015 kl 08 13
 Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 9 maj 5 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt 5 poäng.
Institutionen för REGLERTEKNIK Reglerteknik AK Tentamen 9 maj 5 kl 8 3 Poängberäkning och betygssättning Lösningar och svar till alla uppgifter skall vara klart motiverade. Tentamen omfattar totalt 5 poäng.
TSRT91 Reglerteknik: Föreläsning 2
 Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar / TSRT9 Reglerteknik: Föreläsning 2 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
EL1000/1120/1110 Reglerteknik AK
 EL1000/1120/1110 Reglerteknik AK Kursansvarig: Henrik Sandberg hsan@kth.se Reglerteknik EES Osquldas v. 10 Dagens program: Kursinformation Reglerteknik konsten att styra Inledande exempel och begrepp Kursinformation
EL1000/1120/1110 Reglerteknik AK Kursansvarig: Henrik Sandberg hsan@kth.se Reglerteknik EES Osquldas v. 10 Dagens program: Kursinformation Reglerteknik konsten att styra Inledande exempel och begrepp Kursinformation
1RT490 Reglerteknik I 5hp Tentamen: Del A Tid: Onsdag 22 augusti 2018, kl
 Tentamenskod Klockslag för inlämning Utbildningsprogram Bordnummer RT490 Reglerteknik I 5hp Tentamen: Del A Tid: Onsdag 22 augusti 208, kl. 4.00-7.00 Plats: Bergsbrunnagatan 5, sal Ansvarig lärare: Hans
Tentamenskod Klockslag för inlämning Utbildningsprogram Bordnummer RT490 Reglerteknik I 5hp Tentamen: Del A Tid: Onsdag 22 augusti 208, kl. 4.00-7.00 Plats: Bergsbrunnagatan 5, sal Ansvarig lärare: Hans
REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL En tillståndsmodell ges t.ex. av den styrbara kanoniska formen: s 2 +4s +1.
 REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL20 Lösningsförslag till tentamen 2009 2 5, kl. 4.00 9.00. (a) Laplacetransform av () ger s 2 Y (s)+4sy (s)+y (s) =U(s), och överföringsfunktionen blir G(s)
REGLERTEKNIK KTH REGLERTEKNIK AK EL000/EL0/EL20 Lösningsförslag till tentamen 2009 2 5, kl. 4.00 9.00. (a) Laplacetransform av () ger s 2 Y (s)+4sy (s)+y (s) =U(s), och överföringsfunktionen blir G(s)
Föreläsning 1 Reglerteknik AK
 Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
Föreläsning 1 Reglerteknik AK c Bo Wahlberg Avdelningen för Reglerteknik, KTH 29 augusti, 2016 2 Introduktion Example (Temperaturreglering) Hur reglerar vi temperaturen i ett hus? u Modell: Betrakta en
TSIU61: Reglerteknik. de(t) dt + K D. Sammanfattning från föreläsning 4 (2/3) Frekvensbeskrivning. ˆ Bodediagram. Proportionell }{{} Integrerande
 dt + K D. Sammanfattning från föreläsning 4 (2/3) Frekvensbeskrivning. ˆ Bodediagram. Proportionell }{{} Integrerande") TSIU6 Föreläsning 5 Gustaf Hendeby HT 207 / 25 Innehåll föreläsning 5 TSIU6: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby ˆ Sammanfattning av föreläsning 4 ˆ Introduktion till
TSIU6 Föreläsning 5 Gustaf Hendeby HT 207 / 25 Innehåll föreläsning 5 TSIU6: Reglerteknik Föreläsning 5 Frekvensbeskrivning Bodediagram Gustaf Hendeby ˆ Sammanfattning av föreläsning 4 ˆ Introduktion till
TENTAMEN I REGLERTEKNIK
 TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
TENTAMEN I REGLERTEKNIK TID: 29-6-4, kl 4.-9. KURS: TSRT9 PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Johan Löfberg, tel 7-339 BESÖKER SALEN: 5., 7.3 KURSADMINISTRATÖR: Ninna Stensgård,
REGLERTEKNIK KTH. REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen , kl
 REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2009 12 15, kl. 14.00 19.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
REGLERTEKNIK KTH REGLERTEKNIK AK EL1000/EL1110/EL1120 Tentamen 2009 12 15, kl. 14.00 19.00 Hjälpmedel: Kursboken i Reglerteknik AK (Glad, Ljung: Reglerteknik eller motsvarande) räknetabeller, formelsamlingar
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2015-06-08 Sal (1) TER 2, TER 3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 2015-06-08 Sal (1) TER 2, TER 3 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in
TENTAMEN I TSRT91 REGLERTEKNIK
 SAL: TER3 TENTAMEN I TSRT9 REGLERTEKNIK TID: 28-4-3 kl. 4: 9: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 7-69294 BESÖKER SALEN: cirka
SAL: TER3 TENTAMEN I TSRT9 REGLERTEKNIK TID: 28-4-3 kl. 4: 9: KURS: TSRT9 Reglerteknik PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 5 ANSVARIG LÄRARE: Martin Enqvist, tel. 7-69294 BESÖKER SALEN: cirka
EL1000/1120 Reglerteknik AK
 KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
KTH ROYAL INSTITUTE OF TECHNOLOGY EL1000/1120 Reglerteknik AK Henrik Sandberg (hsan@kth.se) Reglerteknik EES Osquldas väg 10, plan 6 Dagens program Kursinformation Reglerteknik konsten att styra Inledande
Specifikationer i frekvensplanet ( )
") Föreläsning 7-8 Specifikationer i frekvensplanet (5.2-5.3) Återkopplat system: Enligt tidigare gäller att där och Y (s) =G C (s)r(s) G C (s) = G O(s) 1+G O (s) G O (s) =F (s)g(s) är det öppna systemet
Föreläsning 7-8 Specifikationer i frekvensplanet (5.2-5.3) Återkopplat system: Enligt tidigare gäller att där och Y (s) =G C (s)r(s) G C (s) = G O(s) 1+G O (s) G O (s) =F (s)g(s) är det öppna systemet
Välkomna till TSRT19 Reglerteknik Föreläsning 5. Sammanfattning av föreläsning 4 Frekvensanalys Bodediagram
 Välkomna till TSRT19 Reglerteknik Föreläsning 5 Sammanfattning av föreläsning 4 Frekvensanalys Bodediagram Sammanfattning av förra föreläsningen 2 Givet ett polpolynom med en varierande parameter, och
Välkomna till TSRT19 Reglerteknik Föreläsning 5 Sammanfattning av föreläsning 4 Frekvensanalys Bodediagram Sammanfattning av förra föreläsningen 2 Givet ett polpolynom med en varierande parameter, och
Välkomna till TSRT19 Reglerteknik M Föreläsning 7. Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet
 Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
Välkomna till TSRT19 Reglerteknik M Föreläsning 7 Framkoppling Koppling mellan öppna systemets Bodediagram och slutna systemets stabilitet Framkoppling 2 Anledningen till att vi pratar om framkoppling
TSRT91 Reglerteknik: Föreläsning 4
 TSRT91 Reglerteknik: Föreläsning 4 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 16 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT91 Reglerteknik: Föreläsning 4 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 16 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Formelsamling i Reglerteknik
 Formelsamling i Reglerteknik Laplacetransformation Antag att f : IR IR är en styckvis kontinuerlig funktion. Laplacetransformen av f definieras av Slutvärdesteoremet F(s) = L(f)(s) = 0 e st f(t)dt lim
Formelsamling i Reglerteknik Laplacetransformation Antag att f : IR IR är en styckvis kontinuerlig funktion. Laplacetransformen av f definieras av Slutvärdesteoremet F(s) = L(f)(s) = 0 e st f(t)dt lim
TENTAMEN I REGLERTEKNIK Y/D
 TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
TENTAMEN I REGLERTEKNIK Y/D SAL: TER3 TID: 8 augusti 8, klockan 8-3 KURS: TSRT, Reglerteknik Y/D PROVKOD: TEN INSTITUTION: ISY ANTAL UPPGIFTER: 6 ANTAL SIDOR PÅ TENTAMEN (INKLUSIVE FÖRSÄTTSBLAD): 6 ANSVARIG
Figure 1: Blockdiagram. V (s) + G C (s)y ref (s) 1 + G O (s)
 + G C (s)y ref (s) 1 + G O (s)") Övning 9 Introduktion Varmt välkomna till nionde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Känslighetsfunktionen y ref + e u F (s) G(s) v + + y Figure : Blockdiagram Känslighetsfunktionen
Övning 9 Introduktion Varmt välkomna till nionde övningen i Reglerteknik AK! Håkan Terelius hakante@kth.se Repetition Känslighetsfunktionen y ref + e u F (s) G(s) v + + y Figure : Blockdiagram Känslighetsfunktionen
Laplacetransform, poler och nollställen
 Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Innehåll föreläsning 2 2 Reglerteknik, föreläsning 2 Laplacetransform, poler och nollställen Fredrik Lindsten fredrik.lindsten@liu.se Kontor 2A:521, Hus B, Reglerteknik Institutionen för systemteknik (ISY)
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-- Sal () T,T2,KÅRA (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-- Sal () T,T2,KÅRA (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Föreläsning 2. Reglerteknik AK. c Bo Wahlberg. 3 september Avdelningen för reglerteknik Skolan för elektro- och systemteknik
 Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
Föreläsning 2 Reglerteknik AK c Bo Wahlberg Avdelningen för reglerteknik Skolan för elektro- och systemteknik 3 september 2013 Introduktion Förra gången: Dynamiska system = Differentialekvationer Återkoppling
TSRT91 Reglerteknik: Föreläsning 12
 TSRT91 Reglerteknik: Föreläsning 12 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 15 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TSRT91 Reglerteknik: Föreläsning 12 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Föreläsningar 1 / 15 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Välkomna till TSRT19 Reglerteknik M Föreläsning 9
 Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning föreläsning 8 2 F(s) Lead-lag design:
Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning föreläsning 8 2 F(s) Lead-lag design:
TENTAMEN Reglerteknik 3p, X3
 OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 3p. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
OBS: Kontrollera att du har fått rätt tentamen! Denna tentamen gäller i första hand för Reglerteknik 3p. På sista sidan av tentamen finns ett försättsblad, som ska fyllas i och lämnas in tillsammans med
TENTAMEN: DEL B Reglerteknik I 5hp
 TENTAMEN: DEL B Reglerteknik I 5hp Tid: Fredag 4 mars 204, kl. 3.00-6.00 Plats: Magistern Ansvarig lärare: Hans Norlander, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl 4.30. Tillåtna hjälpmedel:
TENTAMEN: DEL B Reglerteknik I 5hp Tid: Fredag 4 mars 204, kl. 3.00-6.00 Plats: Magistern Ansvarig lärare: Hans Norlander, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl 4.30. Tillåtna hjälpmedel:
TENTAMEN: DEL B Reglerteknik I 5hp
 TENTAMEN: DEL B Reglerteknik I 5hp Tid: Fredag 8 mars 0, kl. 4.00-9.00 Plats: Gimogatan 4 sal Ansvarig lärare: Hans Norlander, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl 5.30 och kl 7.30.
TENTAMEN: DEL B Reglerteknik I 5hp Tid: Fredag 8 mars 0, kl. 4.00-9.00 Plats: Gimogatan 4 sal Ansvarig lärare: Hans Norlander, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl 5.30 och kl 7.30.
Reglerteknik, TSIU 61
 Reglerteknik, TSIU 61 Föreläsning 7 Regulatorkonstruktion i Bodediagram Reglerteknik, ISY, Linköpings Universitet Innehåll 2(18) 1. Sammanfattning av föreläsning 6 2. Hur ställer man in en PID-regulator
Reglerteknik, TSIU 61 Föreläsning 7 Regulatorkonstruktion i Bodediagram Reglerteknik, ISY, Linköpings Universitet Innehåll 2(18) 1. Sammanfattning av föreläsning 6 2. Hur ställer man in en PID-regulator
TSRT91 Reglerteknik: Föreläsning 11
 Föreläsningar / 5 TSRT9 Reglerteknik: Föreläsning Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar / 5 TSRT9 Reglerteknik: Föreläsning Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
TENTAMEN I REGLERTEKNIK Y TSRT12 för Y3 och D3. Lycka till!
 TENTAMEN I REGLERTEKNIK Y TSRT2 för Y3 och D3 TID: 7 mars 25, klockan 4-9. ANSVARIGA LÄRARE: Mikael Norrlöf, tel 28 27 4, Anna Hagenblad, tel 28 44 74 TILLÅTNA HJÄLPMEDEL: Läroboken Glad-Ljung: Reglerteknik,
TENTAMEN I REGLERTEKNIK Y TSRT2 för Y3 och D3 TID: 7 mars 25, klockan 4-9. ANSVARIGA LÄRARE: Mikael Norrlöf, tel 28 27 4, Anna Hagenblad, tel 28 44 74 TILLÅTNA HJÄLPMEDEL: Läroboken Glad-Ljung: Reglerteknik,
Reglerteknik, TSIU 61
 Reglerteknik, TSIU 61 Föreläsning 8 Störningar, modellfel och svårstyrda system Reglerteknik, ISY, Linköpings Universitet Innehåll 2(15) 1. Sammanfattning av föreläsning 7 2. Känslighet mot störningar
Reglerteknik, TSIU 61 Föreläsning 8 Störningar, modellfel och svårstyrda system Reglerteknik, ISY, Linköpings Universitet Innehåll 2(15) 1. Sammanfattning av föreläsning 7 2. Känslighet mot störningar
Figur 2: Bodediagrammets amplitudkurva i uppgift 1d
 Lösningsförslag till tentamen i Reglerteknik Y (för Y och D) (TSRT) 008-06-0. (a) Vi har systemet G(s) (s3)(s) samt insignalen u(t) sin(t). Systemet är stabilt ty det har sina poler i s 3 samt s. Vi kan
Lösningsförslag till tentamen i Reglerteknik Y (för Y och D) (TSRT) 008-06-0. (a) Vi har systemet G(s) (s3)(s) samt insignalen u(t) sin(t). Systemet är stabilt ty det har sina poler i s 3 samt s. Vi kan
1RT490 Reglerteknik I 5hp Tentamen: Del B
 RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Tisdag 23 oktober 208, kl. 4.00-7.00 Plats: Polacksbackens skrivsal Ansvarig lärare: Hans Rosth, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl
RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Tisdag 23 oktober 208, kl. 4.00-7.00 Plats: Polacksbackens skrivsal Ansvarig lärare: Hans Rosth, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl
TENTAMEN: DEL B Reglerteknik I 5hp
 TENTAMEN: DEL B Reglerteknik I 5hp Tid: Fredag 25 oktober 2013, kl. 13.00-16.00 Plats: Magistern Ansvarig lärare: Hans Norlander, tel. 018-4713070. Hans kommer och svarar på frågor ungefär kl 14.30. Tillåtna
TENTAMEN: DEL B Reglerteknik I 5hp Tid: Fredag 25 oktober 2013, kl. 13.00-16.00 Plats: Magistern Ansvarig lärare: Hans Norlander, tel. 018-4713070. Hans kommer och svarar på frågor ungefär kl 14.30. Tillåtna
Lösningsförslag till tentamen i Reglerteknik Y/D (TSRT12)
") Lösningsförslag till tentamen i Reglerteknik Y/D (TSRT) 0-03-8. (a) Nolställen: - (roten till (s + ) 0 ) Poler: -, -3 (rötterna till (s + )(s + 3) 0) Eftersom alla poler har strikt negativ realdel är systemet
Lösningsförslag till tentamen i Reglerteknik Y/D (TSRT) 0-03-8. (a) Nolställen: - (roten till (s + ) 0 ) Poler: -, -3 (rötterna till (s + )(s + 3) 0) Eftersom alla poler har strikt negativ realdel är systemet
Välkomna till Reglerteknik Föreläsning 2
 Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
Välkomna till Reglerteknik Föreläsning 2 Sammanfattning av föreläsning 1 Lösningar till differentialekvationer Karakteristiska ekvationen Laplacetransformer Överföringsfunktioner Poler Stegsvarsspecifikationer
1RT490 Reglerteknik I 5hp Tentamen: Del B
 RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Fredag 9 mars 208, kl. 4.00-7.00 Plats: BMC B:3 Ansvarig lärare: Hans Rosth, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl 5.30. Tillåtna hjälpmedel:
RT490 Reglerteknik I 5hp Tentamen: Del B Tid: Fredag 9 mars 208, kl. 4.00-7.00 Plats: BMC B:3 Ansvarig lärare: Hans Rosth, tel. 08-473070. Hans kommer och svarar på frågor ungefär kl 5.30. Tillåtna hjälpmedel:
Försättsblad till skriftlig tentamen vid Linköpings universitet
 Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-6-7 Sal () TER2 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Försättsblad till skriftlig tentamen vid Linköpings universitet Datum för tentamen 23-6-7 Sal () TER2 (Om tentan går i flera salar ska du bifoga ett försättsblad till varje sal och ringa in vilken sal
Reglerteknik M3. Inlämningsuppgift 3. Lp II, 2006. Namn:... Personnr:... Namn:... Personnr:...
 Reglerteknik M3 Inlämningsuppgift 3 Lp II, 006 Namn:... Personnr:... Namn:... Personnr:... Uppskattad tid, per person, för att lösa inlämningsuppgiften:... Godkänd Datum:... Signatur:... Påskriften av
Reglerteknik M3 Inlämningsuppgift 3 Lp II, 006 Namn:... Personnr:... Namn:... Personnr:... Uppskattad tid, per person, för att lösa inlämningsuppgiften:... Godkänd Datum:... Signatur:... Påskriften av
TSRT91 Reglerteknik: Föreläsning 4
 Föreläsningar 1 / 16 TSRT91 glerteknik: Föreläsning 4 Martin Enqvist glerteknik Institutionen för systemteknik Linköpings universitet 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Föreläsningar 1 / 16 TSRT91 glerteknik: Föreläsning 4 Martin Enqvist glerteknik Institutionen för systemteknik Linköpings universitet 1 Inledning, grundläggande begrepp. 2 Matematiska modeller. Stabilitet.
Välkomna till TSRT19 Reglerteknik M Föreläsning 9
 Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning av förra föreläsningen H(s) W(s) 2 R(s)
Välkomna till TSRT19 Reglerteknik M Föreläsning 9 Sammanfattning av föreläsning 8 Prestandabegränsningar Robusthet Mer generell återkopplingsstruktur Sammanfattning av förra föreläsningen H(s) W(s) 2 R(s)
TSIU61: Reglerteknik. Reglerproblemet. Innehåll föreläsning 12: 1. Reglerproblemet: Ex design av farthållare. Sammanfattning av kursen
 TSIU6: Reglerteknik Föreläsning 2 Sammanfattning av kursen gustaf.hendeby@liu.se TSIU6 Föreläsning 2 / 56 Innehåll föreläsning 2:. Reglerproblemet 2. Modellbygge ˆ Fysikalisk modell ˆ Identifiering (t
TSIU6: Reglerteknik Föreläsning 2 Sammanfattning av kursen gustaf.hendeby@liu.se TSIU6 Föreläsning 2 / 56 Innehåll föreläsning 2:. Reglerproblemet 2. Modellbygge ˆ Fysikalisk modell ˆ Identifiering (t
Reglerteknik ES3, W3, EI3, period 2, ht 2007 Preliminär undervisningsplan
 1 Uppsala universitet, Institutionen för informationsteknologi Avdelningen för systemteknik Torsten Söderström October 29, 2007 Reglerteknik ES3, W3, EI3, period 2, ht 2007 Preliminär undervisningsplan
1 Uppsala universitet, Institutionen för informationsteknologi Avdelningen för systemteknik Torsten Söderström October 29, 2007 Reglerteknik ES3, W3, EI3, period 2, ht 2007 Preliminär undervisningsplan
8.2.2 Bodediagram System av första ordningen K =, antages K > 0
 8. Frekvensanalys 8.2 Grafiska representationer av frekvenssvaret 8.2.2 Bodediagram System av första ordningen K G ( s) =, antages K > 0 Ts + A R ( ω) = G( jω) = K + ( ωt ) ϕ( ω) = arg G( jω) = arctan(
8. Frekvensanalys 8.2 Grafiska representationer av frekvenssvaret 8.2.2 Bodediagram System av första ordningen K G ( s) =, antages K > 0 Ts + A R ( ω) = G( jω) = K + ( ωt ) ϕ( ω) = arg G( jω) = arctan(
Överföringsfunktioner, blockscheman och analys av reglersystem
 Övning 3 i Mät- & Reglerteknik 2 (M112602, 3sp), MT-3, 2013. Överföringsfunktioner, blockscheman och analys av reglersystem Som ett led i att utveckla en autopilot för ett flygplan har man bestämt följande
Övning 3 i Mät- & Reglerteknik 2 (M112602, 3sp), MT-3, 2013. Överföringsfunktioner, blockscheman och analys av reglersystem Som ett led i att utveckla en autopilot för ett flygplan har man bestämt följande
REGLERTEKNIK I BERÄKNINGSLABORATION 2
 UPPSALA UNIVERSITET Systemteknik/IT-institutionen HN 0608, 1001 REGLERTEKNIK I BERÄKNINGSLABORATION 2 1. Bode och Nyquistdiagram och stabilitetsmarginaler 2. Systemdynamik, stabilitet och rotort Förberedelseuppgifter:
UPPSALA UNIVERSITET Systemteknik/IT-institutionen HN 0608, 1001 REGLERTEKNIK I BERÄKNINGSLABORATION 2 1. Bode och Nyquistdiagram och stabilitetsmarginaler 2. Systemdynamik, stabilitet och rotort Förberedelseuppgifter:
TSRT91 Reglerteknik: Föreläsning 1
 TSRT91 Reglerteknik: Föreläsning 1 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Diverse 1 / 27 Föreläsare och examinator: Martin Enqvist Lektionsassistent: Angela Fontan
TSRT91 Reglerteknik: Föreläsning 1 Martin Enqvist Reglerteknik Institutionen för systemteknik Linköpings universitet Diverse 1 / 27 Föreläsare och examinator: Martin Enqvist Lektionsassistent: Angela Fontan
TSRT91 Reglerteknik: Föreläsning 1
 1 / 27 Diverse TSRT91 Reglerteknik: Föreläsning 1 Föreläsare och examinator: Martin Enqvist Martin Enqvist Lektionsassistent: Yuxin Zhao Kursrum i Lisam Reglerteknik Institutionen för systemteknik Linköpings
1 / 27 Diverse TSRT91 Reglerteknik: Föreläsning 1 Föreläsare och examinator: Martin Enqvist Martin Enqvist Lektionsassistent: Yuxin Zhao Kursrum i Lisam Reglerteknik Institutionen för systemteknik Linköpings
För ett andra ordningens system utan nollställen, där överföringsfunktionen är. ω 2 0 s 2 + 2ζω 0 s + ω0
 Övning 5 Introduktion Varmt välkomna till femte övningen i glerteknik AK! Håkan Terelius hakante@kth.se petition lativ dämpning För ett andra ordningens system utan nollställen, där överföringsfunktionen
Övning 5 Introduktion Varmt välkomna till femte övningen i glerteknik AK! Håkan Terelius hakante@kth.se petition lativ dämpning För ett andra ordningens system utan nollställen, där överföringsfunktionen