Studie av L2C-signalens möjlighet till ökad tillgänglighet vid GPS-baserad produktionsmätning
|
|
|
- Kerstin Sundström
- för 7 år sedan
- Visningar:
Transkript
, 15 hp Lantmäteriteknik Lantmätarprogrammet, teknisk inriktning Handledare: Mohammad Bagherbandi Examinator: Yuriy Reshetyuk")
1 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Studie av L2C-signalens möjlighet till ökad tillgänglighet vid GPS-baserad produktionsmätning Patric Törnlund & André Ångman 2016 Examensarbete, Grundnivå (kandidatexamen), 15 hp Lantmäteriteknik Lantmätarprogrammet, teknisk inriktning Handledare: Mohammad Bagherbandi Examinator: Yuriy Reshetyuk Bitr. examinator: Faramarz Nilfouroushan
2
3 Förord Detta examensarbete på kandidatnivå har utförts på uppdrag av Lantmäteriet i Gävle under våren år 2016 och avslutar vår treåriga utbildning på Lantmätarprogrammet, med teknisk inriktning, vid Högskolan i Gävle. Vi vill ge ett stort tack till våra handledare på Lantmäteriet, Lars Jämtnäs samt Kent Ohlsson, som alltid funnits tillgängliga under arbetets gång. Tack även till Stefan Öberg, Dan Norin, samt övrig personal på geodesienheten, som instruerat oss i diverse utrustning och tekniska frågor. Till sist vill vi tacka Mohammad Bagherbandi, vår handledare på Högskolan i Gävle, som hjälpt oss att komma fram med nya idéer för både genomförande och upplägg av studien. Gävle, maj 2016 Patric Törnlund & André Ångman I
4 II
5 Sammanfattning Eftersom intresset och användandet av satellitbaserad positionering ökat under de senaste åren så är det av stort intresse att utveckla och förbättra de globala navigationssystemen, samt användandet av dessa. På uppdrag av Lantmäteriet i Gävle så har i denna studie en utvärdering av L2C-signalen, som är GPS andra civila signal, genomförts för att undersöka dess möjligheter till ökad tillgänglighet samt minskade mätosäkerheter, vid mätning med nätverks-rtk. Detta inkluderar även en undersökning av hur signalen kan användas i olika fabrikat av GNSSutrustning. Fabrikaten som testats är Leica, Topcon samt Trimble, vilka kan anses täcka större delen av den svenska marknaden för RTK-utrustning. Datainsamlingen genomfördes i Mårtsbo där sju kända punkter som ingår i ett av Lantmäteriets testnät mättes in i flera omgångar för att få flera oberoende mätningar, både med och utan L2Csignalen. Samtliga punkter ligger belägna i skogsmiljö, men är av varierande svårighetsgrad. I efterbearbetningen beräknades och jämfördes dels standardosäkerheter och avvikelser mellan de två signalinställningarna, men även medeltid med erhållen fixlösning samt initialiseringstider. Testerna av implementeringen av signalen för de tre olika fabrikaten skedde på SWEPOS-driften på Lantmäteriet i Gävle, där signalförstärkare finns monterad på taket. Resultaten från fältmätningarna ger en antydan till förbättring av både tiden till fixlösning samt mätosäkerheter vid inkluderandet av L2C-signalen, framförallt vid de punkter som klassats som svårast. Resultatet uppfyller dock inte riktigt de på förhand höga förhoppningarna, som utlovats av GPS samt diverse litteratur, då signalen enligt dessa borde ha gett en förbättring även på de lättare punkterna. Signalen visade sig gå att använda i alla tre fabrikat som testats, dock på något olika sätt. Nyckelord: GNSS, GPS, L2C, Nätverks-RTK. III
6 Abstract Since applications of satellite based positioning techniques are constantly increasing, it is important to study the development of GNSS which is improving as well. National Land Survey of Sweden (NLSS) supported this study in order to evaluate the second civil signal from GPS (L2C). The idea is to investigate how using L2C increases the accessibility and accuracy in network-rtk. This also includes an evaluation of how the signal works in different brands of positioning equipment. The equipment that has been selected for this test includes models from the three most established brands in Sweden: Leica, Topcon and Trimble. The data collection was carried out in the area of Mårtsbo where seven well known points were measured, both with and without the L2C signal, for several times. All the measured points are located in forest environments, but with different levels of visibility. In the data post processing many parameters were considered for comparing the results such as: uncertainties, differences from known coordinates, time of fixed solution and initialization time. The tests of how the signal works in the three selected receiver models were carried out at the office of NLSS where a permanent reference antenna is mounted. The result of the field study indicates some improvement regarding the measurement uncertainties and time to fixed solution when including the L2C-signal, especially on those points classified as the most problematic. However, the result does not really fulfill the predicted expectations as hoped, where much bigger advantages for the L2C signal should have been shown. The signal could be used in all the three tested GNSS-equipment, despite of slightly different methods and features. Key-words: GNSS, GPS, L2C, Network-RTK. IV
7 Innehållsförteckning 1. Inledning och bakgrund Syfte och frågeställningar Avgränsningar Begrepp och teoretisk bakgrund GPS-konstellationen Block och signaler från GPS L2C-signalen SWEPOS Real-Time Kinematic Osäkerhetskällor vid GNSS-mätning Tidigare studier Nätverks-RTK Implementering av L2C-signalen Testområde Mårtsbo Punktbeskrivning Datainsamling Efterbearbetning och analys Resultat Implementering av L2C-signalen i olika roverutrustningar Leica Topcon Trimble L2C-signalen i svåra signalförhållanden Fixlösning Mätosäkerheter och avvikelser Diskussion Tänkbara anledningar till ouppnådda förväntningar Framtida studier Slutsats Referenser Bilaga A: Jonosfärsmonitorer från SWEPOS Bilaga B: Mätserier Leica Bilaga C: Mätserier Topcon Bilaga D: Mätmiljöer enligt HMK V
8
9 1. Inledning och bakgrund Användningen och utvecklingen av Global Navigation Satellite System (GNSS), som exempelvis det amerikanska Global Positioning System (GPS) och det ryska Globalnaja navigatsionnaja sputnikovaja sistema (GLONASS), har under senare år ökat. GNSS är lätt att använda och kan i många fall spara både tid och pengar jämfört med andra mer traditionella mätmetoder (Mauro, Valbuena, Manzanera & García-Abril, 2010). Som ett exempel skriver både Song, Xian, Zhang, Jiang & Zhang (2015) och Cao (2015) om ett ökat intresse för Unmanned Aerial Systems (UAS) där ett fjärrstyrt plan eller helikopter, utrustad med GNSSmottagare samt en kamera eller skanner, används för bland annat övervakning och att skapa 3D-modeller av särskilda områden. Dessa områden kan i många fall vara svårtillgängliga, eller till och med otillgängliga, för traditionella mätmetoder. Kaartinen et.al (2015) förmedlar i sin tur den möjliga användbarheten av GNSS vid skogsbruk. Att montera GNSS-mottagare, tillsammans med en del andra instrument, på skördemaskinerna ger enligt dem möjlighet att erhålla exakt data på vilka träd som skördas samt ge en tydlig bild av skogsområdets utformning. Inventeringen av skogen kan därmed underlättas och mycket av det fältarbete som krävs i dagsläget kan ersättas av denna metod. Både Kaartinen et al. (2015) och Song et al. (2015) beskriver dock problemet med GNSS försämrade pålitlighet i vissa typer av miljöer. Områden med mycket skog och bebyggelse ger ofta dålig signalstyrka samt mångreflektion av signalen, vilket leder till sämre tillgänglighet samt höga positionsosäkerheter. Problemen som dessa författare nämner ska dock till stor del kunna elimineras i och med GPS senaste modernisering och införandet av satelliter i Block IIR(M) och Block IIF. Alla dessa satelliter är kompatibla med en andra civil signal på L2-bandet (L2C) (GPS, u.å) och många förutspår att denna signal ska bidra till att öka tillgängligheten för kommersiella GPS-användare. GPS som för närvarande (mars 2016) har 31 aktiva satelliter, är det mest utvecklade GNSSsystemet och används inom flera viktiga system och applikationer, i länder över hela världen. Av de 31 satelliterna i omlopp, är just nu 19 kompatibla att sända L2C-signalen. Signalkonstellationen är dock inte komplett förrän 24 aktiva L2C-satelliter är i omloppsbana, vilket förväntas hända någon gång under 2018 (Schmidt, 2015 ; GPS, u.å). Vid full konstellation av satelliter, dvs. 24 stycken, varierar mätosäkerheten i dagsläget mellan några millimeter och tiotals meter. Fler faktorer än bara omgivning och antal satelliter påverkar dock mätosäkerheten, exempelvis om man använder enkel- eller dubbelfrekvens, kod- eller 1
10 bärvågsmätning samt tidsförloppet för själva mätningen. Mätosäkerheter på millimeternivå kan dock endast uppnås i öppna områden i dagsläget, oavsett andra faktorer (Bagrov et al., 2015; Kaartinen et al., 2015) Detta inledande kapitel beskriver dels arbetets syfte samt vilka avgränsningar som gjorts, men också olika begrepp som används inom satellitbaserad positionsbestämning. Här ges även en kortfattad förklaring av GPS-konstellationen, mätmetoder med GNSS, olika typer av GPSsignaler samt osäkerhetskällor som är viktiga att tänka på vid denna typ av mätning Syfte och frågeställningar Det huvudsakliga syftet med studien är att utvärdera om L2C-signalen, vid användande av nätverks-rtk, kan bidra till att öka tillgängligheten vid satellitbaserad produktionsmätning. Även ifall fixlösning kan erhållas enklare och på fler platser än tidigare, samt om mätosäkerheterna kan minskas. Vilka egenskaper hos L2C-signalen är det i så fall som möjliggör förbättringen? Utöver detta så ska även utrustning från olika fabrikat testas för att ge information om hur signalen kan implementeras för var och en av dessa. Frågeställningarna är således utformade som nedan: Hur kan L2C-signalen implementeras på bästa sätt för olika fabrikat av GNSSutrustning? Kommer L2C-signalen bidra till att öka tillgängligheten i signalförsvårade områden, vid produktionsmätning med nätverks-rtk, samt ge minskade mätosäkerheter? 1.2. Avgränsningar Arbetet har avgränsats till att enbart kontrollera möjligheten till implementering på tre roverutrustningar, från tre olika fabrikat; Leica, Topcon och Trimble. Enbart två av dessa fabrikat kunde användas vid de olika testerna ute i fält, Leica och Topcon. Eftersom en av dessa mottagare inte hade någon inbyggd radio så kunde mätning med enkelstations-rtk inte att utföras, utan enbart med nätverks-rtk. Vid datainsamlingen har enbart GPS-satelliter använts 2
11 för att eliminera alla onödiga variabler. Vid jämförelsen av mätosäkerheter, i samband med efterbearbetningen, har enbart koordinater i plan kontrollerats, där erhållen höjd uteslutits från beräkningarna för att ge mer tid till utvärdering av positioner i plan. Då enbart en mottagare av varje fabrikat fanns tillgänglig så blev det omöjligt att utföra mätningar med respektive utan L2C-signalen exakt samtidigt, vilket medförde att förhållandena kunde förändras något Begrepp och teoretisk bakgrund Nedan beskrivs en del begrepp som är starkt förknippade med positionsbestämning med GPS. Grundprincipen bygger dock på att signaler från GPS-satelliter, innehållande olika data, först tas emot av en GPS-mottagare. Med vetskapen om att signalen färdas med ljusets hastighet räknar mottagaren därefter ut tiden det tagit för signalen att färdas från satelliten och omvandlar den till en distans med hjälp av de data som inkluderas i signalen. Exempel på data är bland annat satellitens namn, dess exakta omloppshöjd samt aktuell tid för den inbyggda satellitklockan. En del korrektioner av distansen behöver utföras eftersom signalen påverkas på olika sätt när den färdas genom jonosfär och troposfär, vilket skapar så kallade fördröjningar av signalen. Genom att utföra korrektioner för dessa fördröjningar, för signaler från minst fyra olika satelliter (tre stycken för distans samt en för klockkorrektioner), kan som oftast mottagarens tredimensionella position fastställas med låga mätosäkerheter som följd (Kaartinen, et al., 2015;Trimble, u.å). Osäkerheterna för positionen blir lägre ju fler satelliter som mottagaren har kontakt med eftersom detta ger fler överbestämningar av positionen. Osäkerheterna beror dock även på signalernas kvalité och styrka (Radio-Electronics, u.å) GPS-konstellationen Totalt finns det (mars 2016) 31 aktiva GPS satelliter i omloppsbana runt jorden, på en höjd av ungefär km. Dock krävs endast 24 aktiva satelliter för att konstellationen ska vara komplett och fungera som utlovat. Dessa 31 är en blandning av nya och äldre satelliter som är fördelade i olika block baserat på vilken generation av satelliter de tillhör (GPS, u.å). Varje generation karaktäriseras av olika egenskaper, exempelvis vilka typer av signaler de är kapabla att sända ut. Konstellationen är ständigt under utveckling och moderniseringar sker och har skett regelbundet (Lilje, Engfeldt & Jivall, 2007). 3

12 Block och signaler från GPS I dagsläget finns enligt GPS (u.å) aktiva satelliter i tre olika block; IIR, IIR(M) och IIF. Av dessa tre är block IIR det äldsta, med satelliter uppskjutna mellan åren 1997 och 2004 i syfte att ersätta eller backa upp satelliter från de tidigare blocken II och IIA. Satelliterna i block IIR är utrustade för att sända ut både en civil C/A-kod på L1 samt en krypterad P(Y)-kod för millitärt bruk på både L1 och L2. Mellan åren 2005 och 2009 placerades nästa generation av satelliter i omloppsbana, i block IIR(M). Dessa gav, utöver IIR-blockets egenskaper, även en andra civil signal på L2 (L2C) samt en ny M-militärkod. L2C-signalen är den signal som analyseras i detta examensarbete och de förväntningarna som fanns vid uppskjutningen var bland annat att den, i kombination med L1, skulle uppnå samma låga osäkerheter som de militära signalerna. Redan 2010 började nästa generation av satelliter att skjutas upp, tillhörande det för närvarande yngsta blocket, block IIF. Förutom alla signaler från block IIR(M) så introducerades här även en tredje civil signal på L5 (L5). Syftet med denna är främst att höja tillförlitligheten för precisionskrävande transportmedel, exempelvis inom flyg, väg och järnväg, men även att i kombination med L1 och L2C öka tillförlitligheten ytterligare för civila användare. Även en ny civil signal på L1 (L1C) kommer att finnas tillgänglig efter att nästa planerade block, block GPS III, har etablerats. Planen är att dessa satelliter ska vara Figur 1. Information om Blocken i GPS-konstellationen. Hämtad , från 4
13 redo att börja skjutas upp någon gång under 2016 (GPS, u.å ; Marques, Monico & Marques, 2015). I figur 1 går att se alla olika block samt deras specifika egenskaper L2C-signalen L2C är framtagen och utvecklad med syftet att öka precisionen för kommersiella GPSanvändare. Vid mätning med L2C i kombination med L1 ska enligt Marques, et al., (2015) korrektioner för jonosfäriska fel kunna utföras, vilket bidrar till både lägre mätosäkerheter samt kortare initialiseringstid. Fram tills idag har endast militären haft tillgång till dessa typer av korrektioner genom sina krypterade P/Y-signaler. L2C sänds ut på radiofrekvensen 1227,60 MHz, också kallad L2, vilket speglas av signalens namn, där C betyder att den är till för civilt bruk (GPS, u.å.). De 19 L2C-kompatibla satelliter som finns aktiva just nu går att se i tabell 1. Tabell 1. Satelliter med möjlighet att sända ut L2C-signalen. Irving (2006) beskriver i sin artikel de fördelar som L2C-signalen har gentemot de äldre GPSsignalerna. Han påstår att L2C-signalen ger lägre mätosäkerhet, är mer robust och har snabbare signalförvärv än L1-signalen. Signalen har också högre signalstyrka vilket medför möjligheten att utföra mätningar inomhus och i försvårade signalförhållanden. Utöver detta skulle en kombination av L1 (C/A) och L2C ge ännu lägre mätosäkerheter och även ökad tillgänglighet SWEPOS SWEPOS är Sveriges nationella nät av fasta referensstationer för GNSS, med ca. 430 stationer etablerade över hela landet (år 2016). Varje station är utrustad med en mottagare som kan ta emot signaler från satelliterna och en fast dataförbindelse med driftledningscentralen på Lantmäteriet i Gävle. Referensstationerna delas in i två kategorier, klass A-stationer och klass B-stationer, där klass A är stationer med en mer stabil antennmontering än klass B (se figur 2). För klass A är antennen monterad på en isolerad betongpelare som i sin tur sitter fast i stabil berggrund. Klass B-stationer har GNSS-mottagare som är monterade på redan befintliga byggnader, vilket gör dessa mindre stabila (Swepos, u.å.a). 5
14 Figur 2. Exempel på stationer av klass A (vänster) och Klass B (Höger). Hämtad , från SWEPOS tillhandahåller data från satelliterna för två huvudsakliga mätningsmetoder. Den första är mätningar i realtid, där användaren får korrektioner direkt i mottagaren. Den andra är efterberäkning av insamlad data, där användaren lagrar data som observerats i fält och i efterhand laddar ner korrektioner för att beräkna den exakta positionen (Swepos, u.å.b) Real-Time Kinematic Real-Time Kinematic (RTK) är en geodetisk mätmetod som baseras på bärvågsmätning i realtid. Denna finns i två varianter; enkelstation och nätverksbaserad. Vid enkelstations-rtk krävs två typer av mottagare; en eller flera referensstationer samt en rörlig mottagare (rover) (Berber & Arslan, 2013). Referensstationen etableras över en sedan tidigare koordinatbestämd punkt för att få känd position och för att samla satellitobservationer. Referensstationen kommunicerar i sin tur med rovern, som även utför egna satellitobservationer. Med hjälp av informationen som referensstationen ger, kan rovern reducera inverkan från olika felkällor och därmed erhålla en position på centimeternivå. Detta förutsatt att överföringen av data mellan referensstation och rover sker tillräckligt snabbt, samt att de har kontakt med samma grupp av satelliter. Långa baslinjer mellan rover och referensstation kan leda till högre mätosäkerheter (Lantmäteriet, u.å.b). Principen vid nätverks-rtk-mätning bygger på att användaren kopplar upp sig mot ett fast nät av kommunicerande referensstationer, SWEPOS i Sverige, istället för en enkelstation som vid vanlig RTK (Lantmäteriet, u.å.c). Dessa tar hela tiden emot satellitobservationer som i sin tur skickas vidare till en driftledningscentral där korrektioner för eventuella felkällor, såsom signalstörningar i jonosfär och tropsfär samt klock- och banfel, kan utföras till förmån för användaren av tjänsten. Även här beror mätosäkerheten till viss del på avståndet till närmaste 6
15 station, varför ett så tätt nätverk som möjligt är att föredra (Berber & Arslan, 2013). En förtätning av Sveriges nationella RTK-nätverk inleddes under 2010, där målet är att det maximala avståndet mellan referensstationerna ska vara 35 km. Fördelen med nätverks-rtk är att ingen begränsning av mätområdet finns som vid RTK-mätning, där en ny referensstation behöver etableras om avståndet till den första blir för stort. Nackdelen är att uppkoppling via mobiltelefoni krävs (Lantmäteriet, u.å.c) Osäkerhetskällor vid GNSS-mätning Det finns ett antal felkällor som måste tas i beaktning vid mätning med GNSS. Dessa är uppdelade i tre kategorier enligt tabell 2. Tabell 2. Olika typer av felkällor vid GNSS-mätning. Källa: Lantmäteriet (u.å.a). Vanliga felkällor vid GNSSmätning Satellitbaserade: Mottagarbaserade: Atmosfärsbaserade: Banfel Klockfel Troposfär Klockfel Flervägsfel Jonosfär För få tillgängliga satelliter Brus i mottagaren Den största felkällan är atmosfärsfel. När signalen färdas genom jonosfären så påverkas den, beroende på utsändningsfrekvensen, av laddade partiklar som uppstår i och med solens strålning. I troposfären beror felen på vattenånga samt temperatur och varierar beroende på plats och tid (Lantmäteriet, u.å.a). Genom att utföra korrektioner för dessa fel, för signaler från minst fyra olika satelliter (tre stycken för distans samt en för klockkorrektioner), kan en position med låg osäkerhet erhållas (Kaartinen, et al., 2015). Osäkerheterna för positionen blir lägre för ju högre antal satelliter som mottagaren får kontakt med eftersom mer noggranna korrektioner då kan utföras. Mätosäkerheterna beror dock även på signalernas kvalité och styrka (Radio- Electronics, u.å). En annan stor felkälla vid GNSS-mätning är flervägsfel. Felet uppkommer då signaler från satelliterna reflekteras mot olika objekt, såsom träd eller byggnader, på vägen ner mot mottagaren. Flervägsfel medför att sträckan mellan satellit och mottagare blir för långt och ett fel i positionen erhålls. Signaler som kommer från satelliter som ligger på låga elevationer har större tendens att bidra till flervägsfel än vad signaler från höga elevationer har, eftersom de måste färdas längre genom området med störande objekt. Detta medför att det i alla mottagare 7
16 går att ställa in en elevationsgräns, i grader, där enbart satelliter högre än detta gradtal tas med i beräkningarna för att fastställa positionen (Lantmäteriet, u.å.a). Även typ av antennmodell kan påverka det erhållna resultatet. Det är stora skillnader mellan de antenner som finns idag, där alla har olika egenskaper som i sin tur lämpar sig olika bra för olika förhållanden samt vilken typ av mottagare den kombineras med (HMK-geodesi, 2015) Tidigare studier Förväntningarna på L2C-signalen är dels att den ska påverkas mindre av flervägsfel på grund av att den har en ökad våglängd jämfört med tidigare signaler, men även hjälpa till att beräkna fördröjningar av L1-signalen vid dubbelfrekvensmätning och därmed ge möjlighet att utföra korrektioner för dessa. (Chen, Won & Akos, 2014 ; O Keefe, Wang, Petovello & Gernot, 2009). Mubarak & Dempster (2010) har använt sig av L2C-signalen, tillsammans med L1-signalen, för att undersöka om möjligheten för upptäckt av ett eventuellt flervägsfel ökar. Deras resultat visade att användandet av kombinationen L1/L2C ökade chansen rejält för upptäckt, jämfört med tidigare signalkombinationer. Dock gav L1 större möjligheter att upptäcka felen, jämfört med L2C, vid enkelfrekvensmätning. Dessutom kunde användning av endast L2C ge så kallade falska alarm, alltså varna om fel utan att antydan till fel egentligen fanns, vilket blir missvisande. Cho, Park & Lee (2004) utförde tester av L2C-signalen redan innan uppskjutningen av den första kompatibla satelliten i Block IIR-M. Målet var framförallt att intyga att L2C-signalen är bättre, jämfört med L1, på att utföra korrektioner för signalfel som kan uppstå i signalförsvårande områden. Eftersom signalen inte fanns att tillgå via några satelliter så konstruerades en signalgenerator som sände ut signaler med samma specifikationer som L2Csignalen. Signalerna från denna passerade även en störningsgenerator för att simulera en situation med positionsbestämning i ett signalförsvagande område. Slutsatsen från studien blev att L2C klarade av att korrigera felen för störningarna mer effektivt än L1-signalen, vilket enligt författarna innebär goda förhoppningar inför en full konstellation av L2C satelliter. Detta intygas också av Farret, Carvalho Dos Santos & Sukeova (2007) som, genom statiskmätning i tre dagar, fått resultat som tyder på att L2C-signalen påverkas mindre av både flervägsfel och andra störningar, i signalförsvårande områden, än vad L1-signalen gör. L2C signalen ska enligt 8
17 deras studie även vara enklare att hålla kontakten med då denna signal är starkare än L1- signalen Nätverks-RTK Mårtensson, Reshetyuk & Jivall (2012) har gjort en studie om mätosäkerheter vid användandet av SWEPOS nätverks-rtk tjänst, som kan ge en uppfattning av vilka osäkerheter som kan erhållas vid mätning med nätverks-rtk i normala mätmiljöer. Resultatet i studien visar att det är möjligt att uppnå mätosäkerheter som är mindre än 10 mm i plan och mindre än 16 mm i höjd, vid mätningar som är minst en minut, dvs. 60 RTK-positioner. Pirti, Gümüs, Erkaya & Hosbas (2010) har i sin tur gjort RTK-mätningar i varierad skogsmiljö, liknande miljöerna i detta examensarbete. Deras resultat visar på att mätosäkerheterna från studien av Mårtensson et al. (2012) är svårt att uppnå i miljöer där flervägsfel är vanligt förekommande. Studien visar på att standardosäkerheter, på som bäst mm i plan och mm i höjd, går att uppnå i dessa miljöer. Pirti et al. (2010) framhäver dock att det inom en snar framtid, då konstellationerna av L2C-kompatibla satelliter, Galileo och GLONASS är fullständigt utvecklade, kommer vara möjligt att erhålla betydligt lägre mätosäkerheter i områden där flervägsfel är vanligt förekommande. 9
18 2. Metod Metoddelen i detta examensarbete är uppbyggd i tre huvudområden. Två kvantitativa delar, där den första var att undersöka hur och på vilket sätt L2C-signalen kunde implementeras i tre olika roverutrustningar för GNSS. Den andra delen bestod av att utvärdera, med hjälp av data från nätverks-rtk-mätningar, om L2C-signalen kunde öka chansen till fixlösning samt sänka mätosäkerheterna, i ett skogsområde med försämrad signalstyrka samt risk för flervägsfel. För att ytterligare styrka de resultat som erhålls i dessa två delar gjordes också en omfattande kvalitativ analys i form av litteraturstudier och utvärderingar av tidigare studier som behandlar GNSS-baserad positionsbestämning. Zheng, Wang & Nihan (2005) har i sin studie använt en liknande metod. Här testades, likt denna studie, hur mätosäkerheterna förändras i områden med lågt signalförvärv, genom att mäta in 26 punkter i sex omgångar Implementering av L2C-signalen Denna del av studien gjordes på SWEPOS driftcentral i Gävle. En fast monterad antenn på byggnaden gjorde det mjöligt att prova olika inställningar inomhus, utan att först behöva gå ut i fält. Det första som gjordes var att bekanta sig med de tre olika roverutrustningarna som tillhandahölls, se tabell 3. Tabell 3. Roverutrustningar som undersöktes under examensarbetet. Fabrikat: Antennamodell: Handenhet: Leica Leica-GS10 Leica-CS14 Topcon Topcon GR-5 Topcon Pocket 3D Trimble Trimble-R8 Trimble-TSC3 I detta första steg utvärderades de olika roverutrustningarnas möjlighet att ta emot samt använda L2C-signalen och, om de var möjligt, på vilket sätt. Det undersöktes om det finns möjlighet att själv kontrollera vilka olika typer av signaler som mottagaren skulle ta emot, samt om det gick att slå på/av trackningen av L2C-signalen på ett enkelt sätt i mottagaren. Här undersöktes även möjligheten att se hur många och vilka satelliter som sänder ut L2C-signalen och om det går att slå av enskilda satelliter. Det visade sig att det på ett av fabrikaten, Leica, inte var möjligt att utesluta signalen genom enbart inställningar i utrustningen. Därför skapades här, med hjälp av personalen på SWEPOS, två olika anslutningspunkter i SWEPOS RTK-tjänst. Den ena anslutningspunkten uteslöt helt korrigeringar för L2C-signalen, vilket gjorde det möjligt att utföra tester både med och utan L2C-signalen även med detta fabrikat. 10
19 2.2. Fältarbete och test av L2C-signalen Till det andra testet där L2C-signalens möjlighet till minskade osäkerheter samt ökad tillgänglighet i områden med sämre signalstyrka skulle utvärderas, valdes två av tre fabrikat ut. De två roverutrustningar som användes var de från Leica respektive Topcon. Anledningen till att just dessa två valdes ut var att Trimble-utrustningen inte fanns tillgänglig i början av examensarbetet. Mätningar både med och utan L2C-signalen, enligt förklaringen i tidigare stycke, gjordes för att upptäcka eventuella förbättringar vid inkluderandet av denna. Alla satelliter som inte tillhörde GPS, exempelvis GLONASS, valdes bort för att eliminera alla onödiga variabler Testområde Mårtsbo Området där mätningarna ägt rum ligger i Mårtsbo, strax söder om Gävle, där Lantmäteriet har sitt observatorium. Runt observatoriet finns ett testnät av punkter, med kända koordinater (figur 3), varav sju användes till detta arbete. Samtliga sju punkter är belägna i skogsmark, men omgivna av skog med varierande täthet. Den varierande skogstätheten gjorde det möjligt att få en bild av hur kvalitén på mätningarna förändras med omgivningens täthet. Under de fyra första dagarna var det växlande molnighet och ca. 10ºC och sista dagen regn med en temperatur på 5ºC. Jonosfärsmonitorn som tillhandahålls av SWEPOS visade på att jonosfärens påverkan av mätningarna kunde anses försumbar vid samtliga mätningstillfällen, mellan och (Se bilaga A). 11
20 Figur 3. Karta över Lantmäteriets testnät i Mårtsbo, där testerna i studien ägt rum. Punkterna A G är de punkter som mätts in i studien. Tillhandahållen av Lantmäteriet i Gävle Punktbeskrivning Antalet punkter som skulle mätas in begränsades från början till sju stycken, punkt A G i figur 3. Efter mätningarna de två första dagarna märktes tydligt att punkt A och C inte hade speciellt svåra signalförhållanden och därför uteslöts dessa under resterande mätdagar. Detta för att kunna lägga extra tid på de punkter som ansågs relevanta för studien. Nedan följer en punktbeskrivning för var och en av punkterna, i enlighet med de krav och riktlinjer som finns i HMK-Geodesi (1996). Punktbeskrivnigen kompletterades också med någon av de kategorier för lokal mätmiljö som finns stadgade i HMK-Geodesi (2015). Dessa är; lätt miljö, normal miljö, svår miljö och mycket svår miljö. Förklaring för samtliga av dessa finns i bilaga D. Utöver detta skapades också en panoramabild vid varje punkt för att illustrera omgivningen. Längst till vänster i figur 4 9 motsvarar sydöst och går sedan medsols 360º åt höger. Samtliga punkter är utformade som dubb i berg och tillhör Lantmäteriets testnät i Mårtsbo. 12
21 Punkt B: Svår miljö. Närmaste föremål är flera medelhöga träd, belägna ungefär 5 m ifrån punkten. Dålig sikt från sydöst till nordväst. Figur 4. Panoramabild över mätmiljön, tagen från punkt B. Punkt C: Normal miljö. Närmaste föremål är enstaka medelhöga träd, belägna ungefär 6 m ifrån punkten, i sydöstlig- samt nordvästlig riktning. Fri sikt i övrigt. Figur 5. Panoramabild över mätmiljön, tagen från punkt C. Punkt D: Svår miljö. Närmaste föremål är flera medelhöga träd i sydöstlig till nordvästlig riktning, ungefär 7-9 m ifrån punkten. Figur 6. Panoramabild över mätmiljön, tagen från punkt D. Punkt E: Normal miljö. Närmaste föremål är enstaka medelhöga träd, belägna ungefär 4-6 m ifrån punkten, i nordvästlig riktning. Fri sikt i övrigt. Figur 7. Panoramabild över mätmiljön, tagen från punkt E. 13
22 Punkt F: Svår miljö. Låga till medelhöga träd i nordlig till sydlig riktning, 3-6 m ifrån punkten. Relativt fri sikt i övrigt. Figur 8. Panoramabild över mätmiljön, tagen från punkt F. Punkt G: Mycket svår miljö. Höga träd i sydvästlig till sydöstlig riktning, ungefär 2-6 m från punkten. Fri sikt endast i sydlig riktning. Figur 9. Panoramabild över mätmiljön, tagen från punkt G Datainsamling Mätningarna gjordes genom fem mätserier under dagarna 13, 15, 21 och 22 april där varje punkt mättes in två gånger, en med L2C och en där L2C uteslöts, med både Leica och Topcon. Detta gav sammanlagt två observationer per punkt och utrustning, för varje mätningsdag. Eftersom endast en utrustning av varje fabrikat fanns att tillgå så var det inte möjligt att mäta både med och utan L2C-signalen samtidigt, utan mätningarna gjordes istället direkt efter varandra. Mottagaren etablerades med stativ och trefot över punkten som skulle mätas in. Därefter kopplades rovern upp mot SWEPOS, och elevationsvinkeln sattes till 13º. I fallet med Leica valdes här också vilken av de två anslutningspunkterna som skulle användas, för att kunna mäta med respektive utan L2C-signalen. Med Topcon var denna process lättare, då funktionen att slå av och på L2C finns direkt i handenheten. När utrustningarna kopplats upp startades den 900 sekunder långa nätverks-rtk-mätningen där tiden för erhållen fixlösning samt initialiseringstid noterades. Vid mätning med Leica finns Leica Geo Office (LGO) att tillgå vid efterbearbetning, där all nödvändig data och information går att erhålla i efterhand. För Topcon fanns inget program för efterbearbetning att tillgå vid detta examensarbete, varför information 14
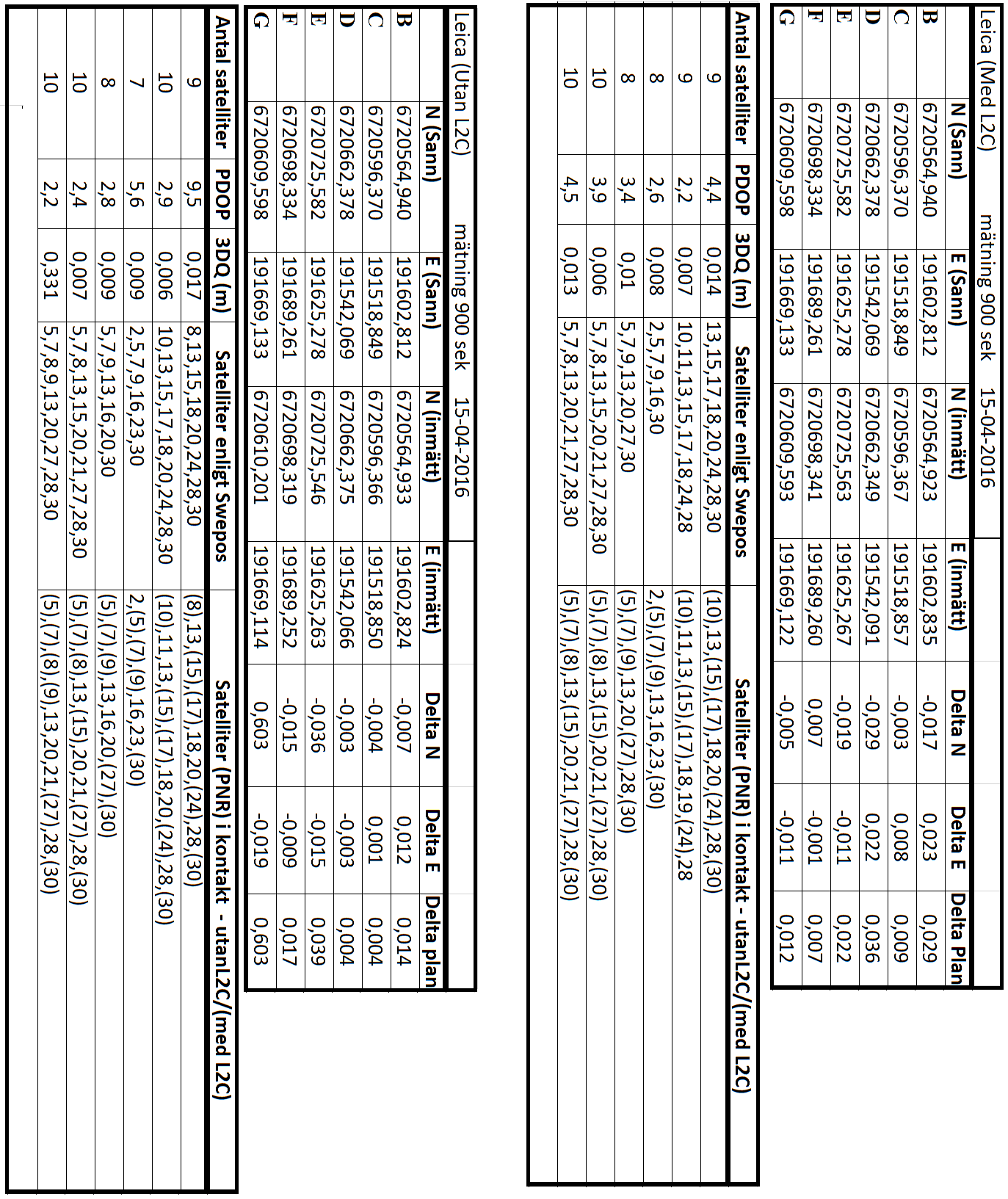
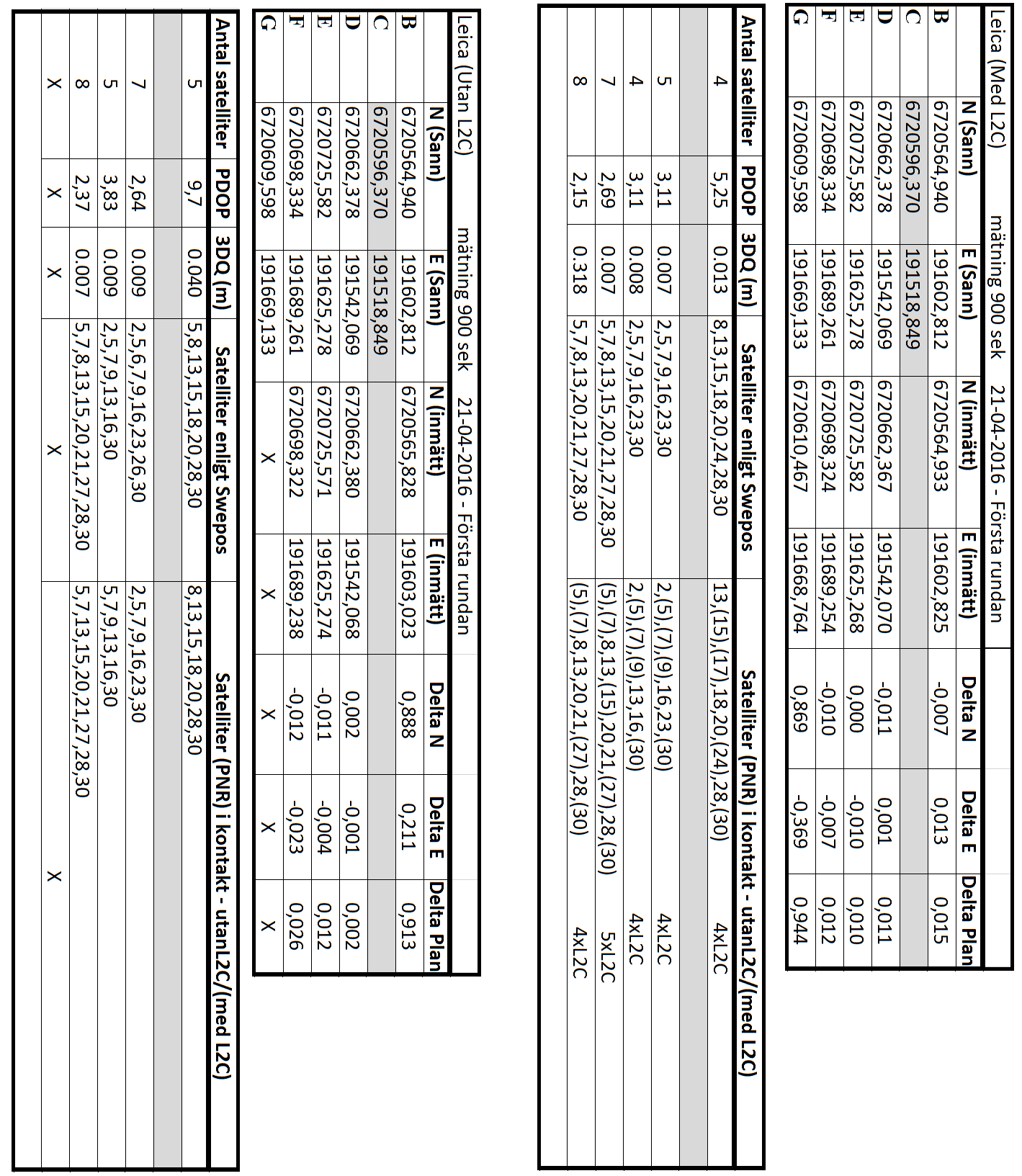
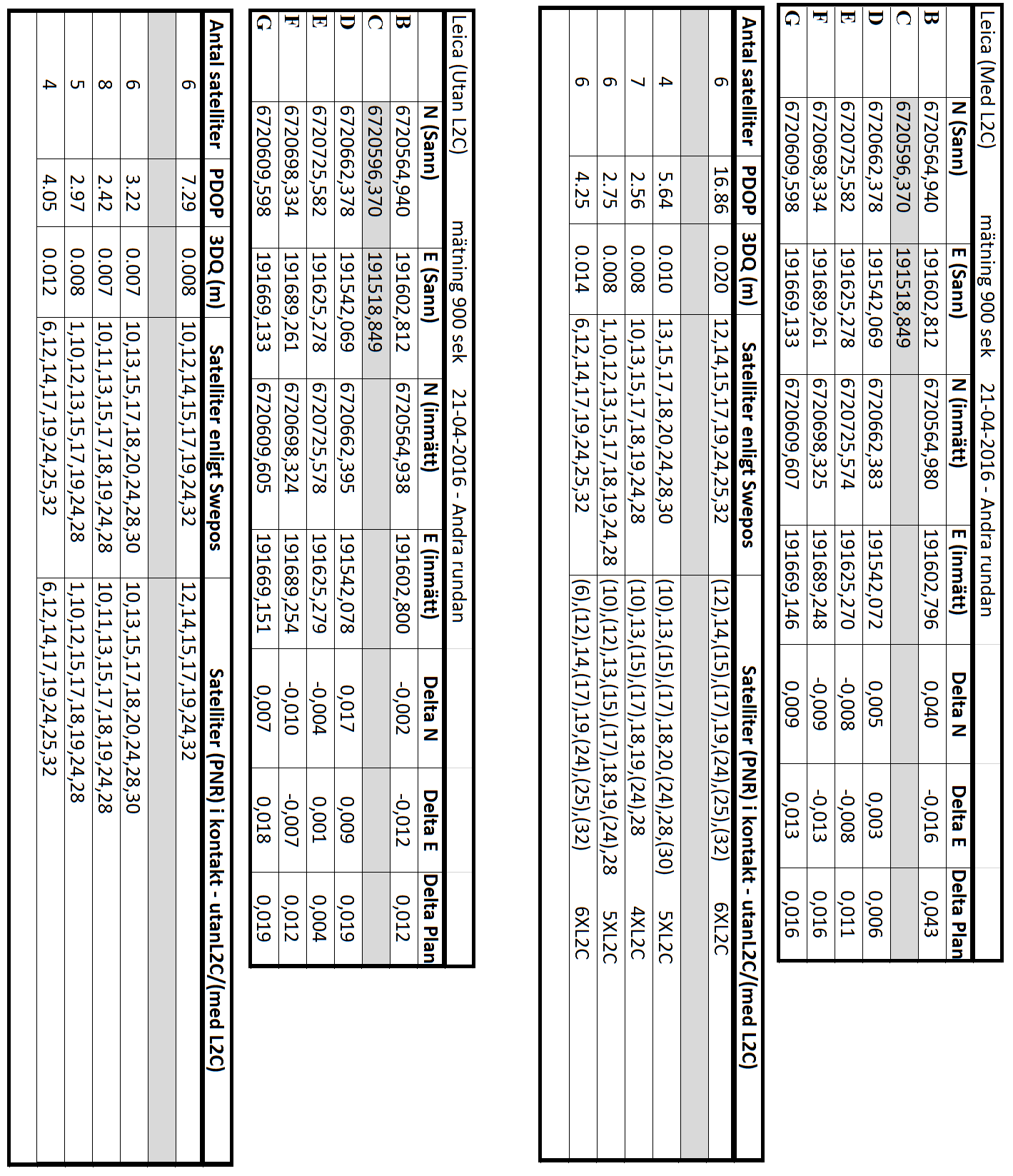
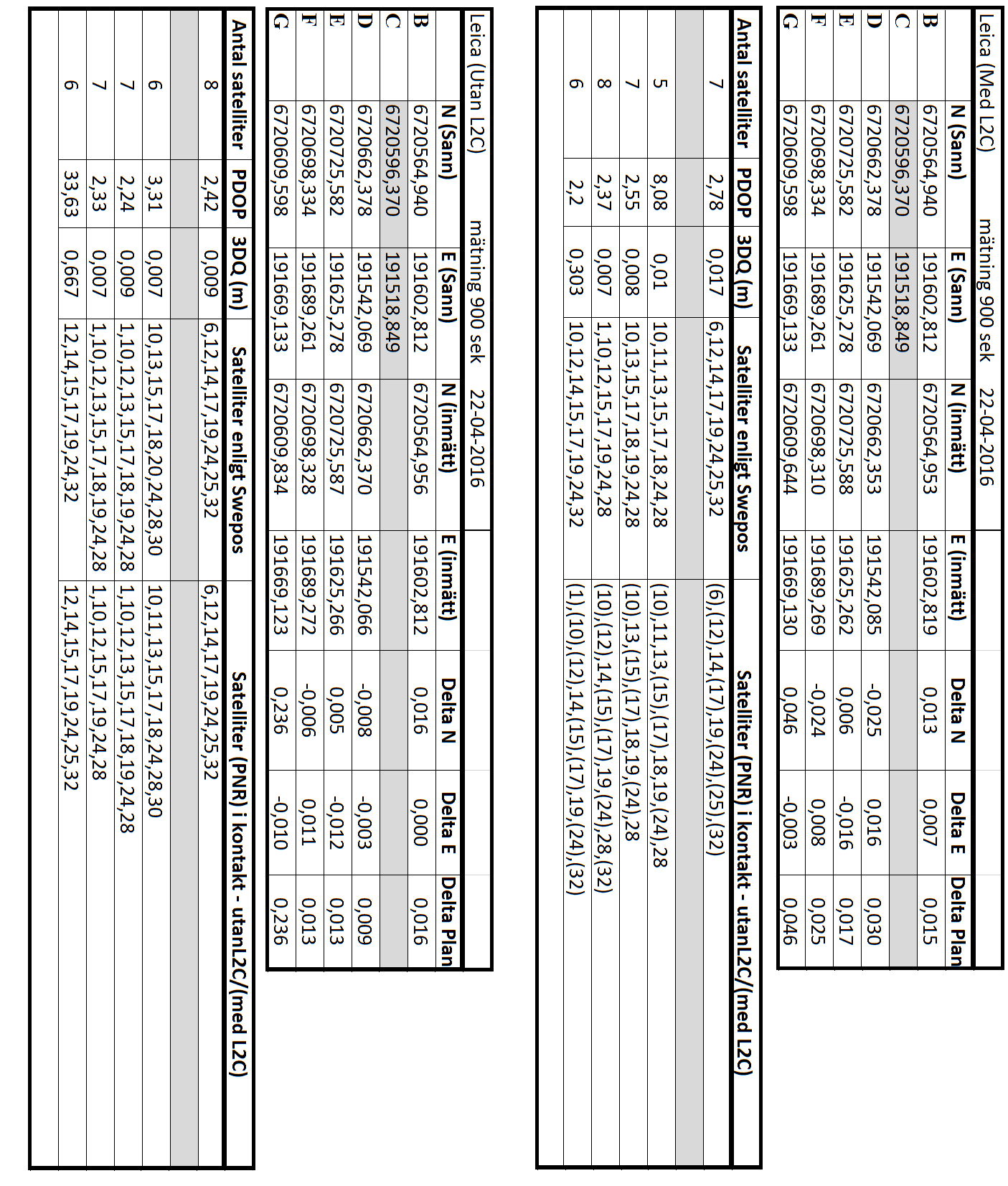
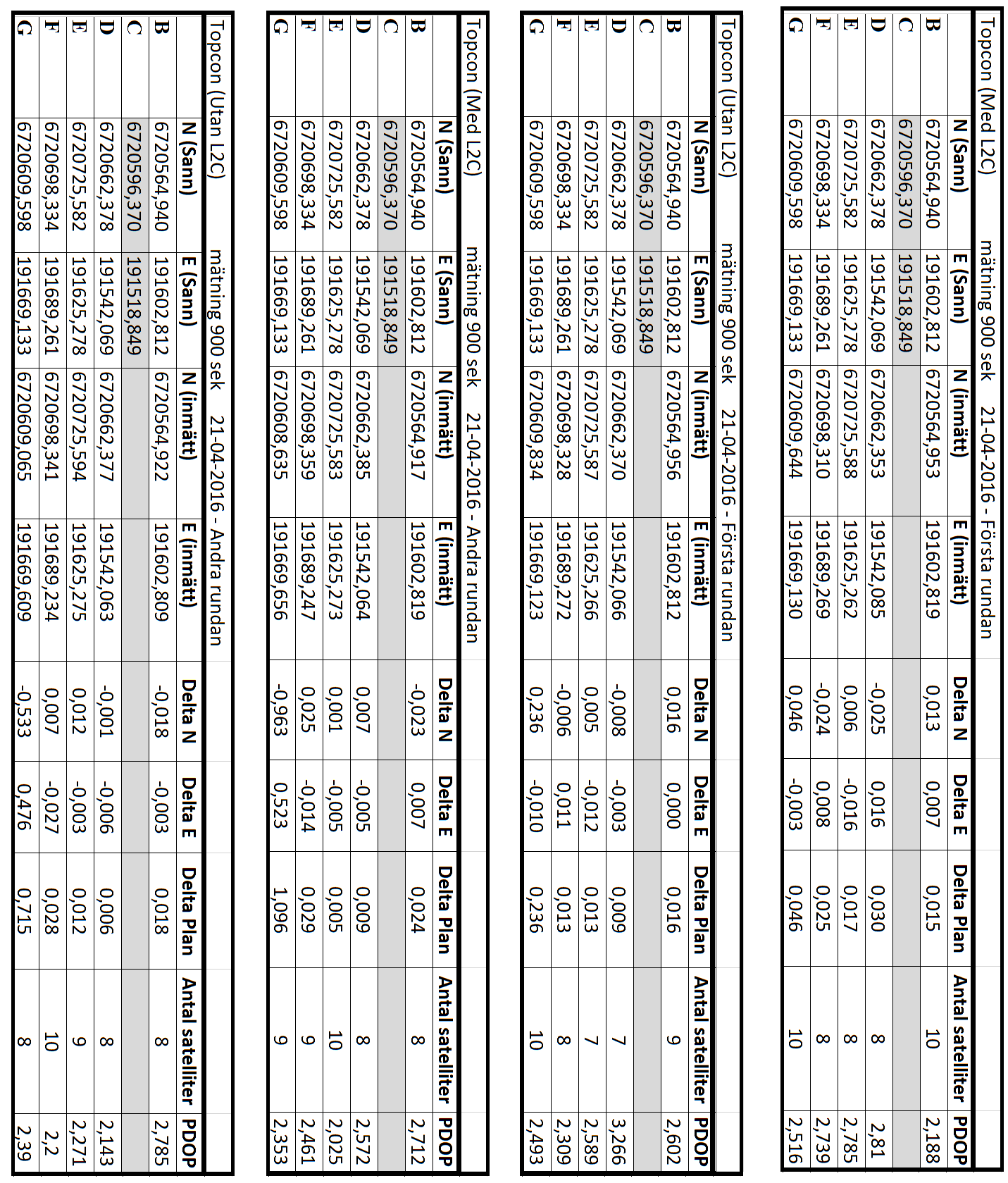
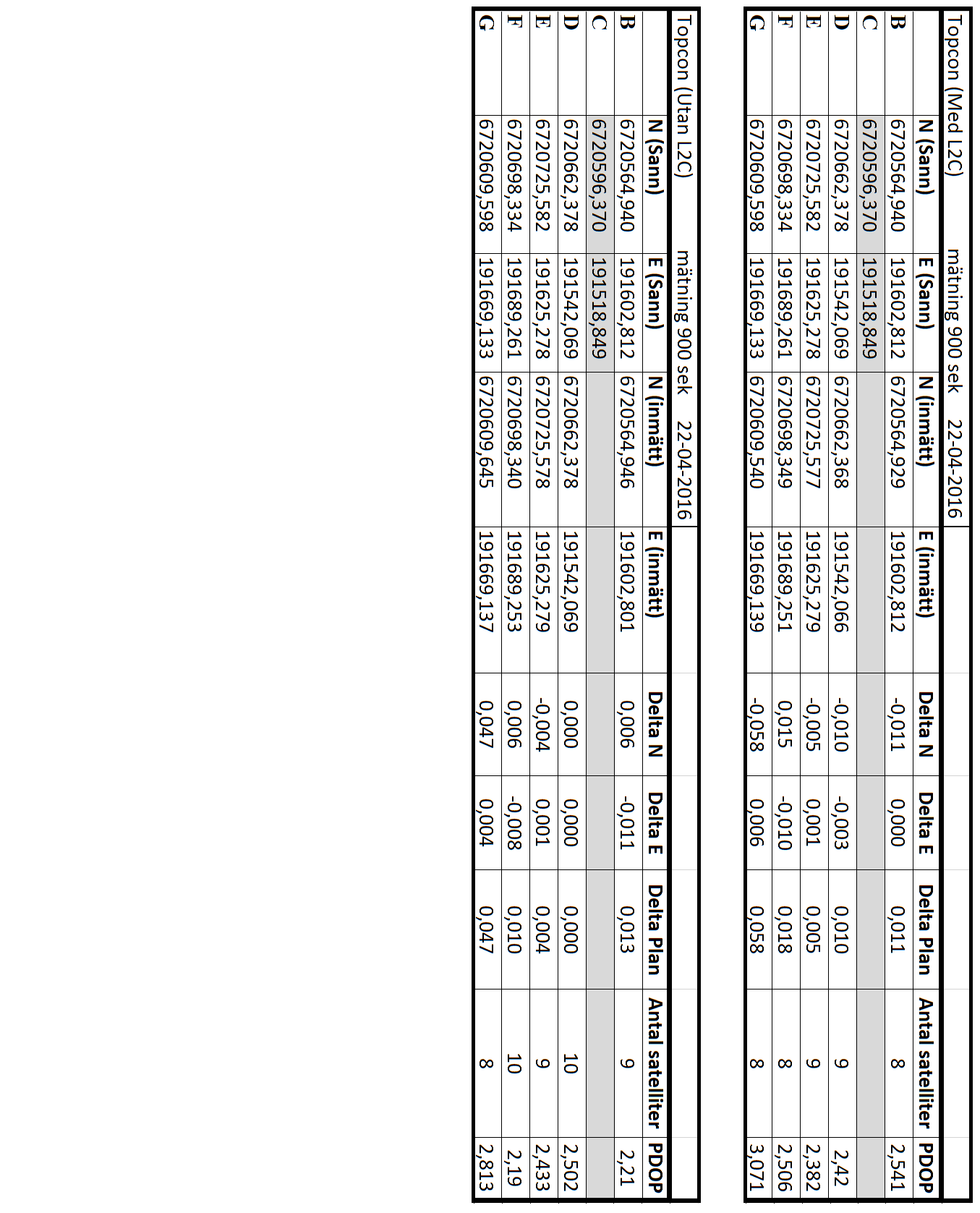
23 om satellitgeometri (PDOP), antal satelliter, samt hur många av dessa satelliter som sände ut L2C-signalen, var nödvändigt att antecknas direkt i fält Efterbearbetning och analys Efterbearbetningen av insamlad data från mätningarna med Leicas roverutrustning gjordes, som tidigare nämnt, i LGO. Där exakt information om vilka satelliter som använts, deras geometri, samt punkternas koordinater, kunde utläsas. Denna information, tillsammans med satellitinformation från SWEPOS om vilka satelliter som ska ha varit tillgängliga under mätningstillfället, samt informationen som antecknats i fält för mätningarna med Topcon, samanställdes sedan i Microsoft Excel. Då punkterna A-F sedan tidigare är kända, med koordinater i SWEREF , kunde ekvation (1.1) användas för att räkna ut avvikelsen mellan inmätta och kända koordinater, för både nordliga (N) och östliga (E) koordinater: N = N inmätt N känd E = E inmätt E känd (1.1) Medelavvikelse (m), för både N och E vid varje punkt, räknades ut enligt ekvation (1.2) och (1.3) för att sedan beräkna den radiella medelavvikelsen enligt ekvation (1.4). m N = N n (1.2) m E = E n (1.3) m NE = m N 2 + m E 2 (1.4) Även standardosäkerheten för N och E vid varje punkt räknades ut (ekvation (1.5) och (1.6)), samt den radiella standardosäkerheten enligt ekvation (1.7). u(n) = 1 n n 1 (N i=1 N i ) 2 (1.5) u(e) = 1 n (E E n 1 i=1 i ) 2 (1.6) u(ne) = u(n) 2 + u(e) 2 (1.7) 15
24 Utöver dessa beräkningar gjordes också jämförelser mellan tiden för erhållen fixlösning, PDOP, samt hur många satelliter som användes för att fastställa positionen. Även antalet L2C-satelliter jämfördes mellan mätningarna för att undersöka om antalet påverkade mätosäkerheterna samt möjligheten till fixlösning. Några signifikanstest eller liknande har inte gjorts. Inte heller har några toleranser bestämts då mätningarna skedde i områden där stora variationer är vanligt förekommande. Istället valdes att påpeka samt förtydliga att dessa mätningar har brister. 16
25 3. Resultat Nedan följer de resultat som erhållits av studien. Första delen presenterar implementeringen av L2C-signalen i de olika fabrikaten. Den andra delen består av de olika resultat som erhållits under själva fältmätningarna, både med- respektive utan L2C-signalen. Fullständiga mätdata finns att tillgå i bilagorna B (Leica) samt C (Topcon) Implementering av L2C-signalen i olika roverutrustningar Följande avsnitt beskriver på vilket sätt L2C-signalen kan användas i de tre olika roverutrustningar som har testats i examensarbetet. En kort förklaring till satellitinställningar, samt hur L2C-signalen kan implementeras, ges utifrån de tester som gjorts på Lantmäteriets kontor i Gävle Leica Den roverutrustning från Leica som har testats i detta examensarbete spårar L2C-signalen konstant från alla tillgängliga satelliter. Den går alltså inte att slå av direkt i handenheten, bekräftat av Leicas support, vilket hade underlättat undersökningen. Den enda valmöjligheten som ges beträffande spårningen av L2C-signalen är alltid trackning eller automatisk trackning. Skillnaden mellan dessa är att vid automatisk så väljer mottagaren bort de signaler som är av dålig kvalité, men vid alltid så används även signaler av lägre kvalitét. Det går heller inte att se i realtid vilka satelliter som mottagaren använder för att beräkna positionen. Dock finns den informationen att tillgå vid efterberäkningen i LGO istället Topcon I denna roverutrustning är det möjligt att använda sig av vilka signaler man vill. Här kan L2C stängas av helt direkt i fältdatorn och signalen utesluts då helt från beräkningarna av positionen. Likaså finns direktinformation att tillgå om vilka satelliter som mottagaren har kontakt med, samt använder sig av. Denna information innefattar dels vilka signaler som en specifik satellit sänder ut, men också på vilken elevationsvinkel satelliten befinner sig i förhållande till mottagaren. Möjligheten finns också att fritt utesluta en eller flera satelliter från positionsbestämningen. 17
26 3.1.3 Trimble I den utvärderade utrustningen från Trimble går det att slå av och på L2C-trackningen genom att skapa olika mätprofiler. Olika signal- och satellitinställningar kan göras vid skapandet av dessa. I det aktuella jobbet kan man sedan skifta mellan olika profiler och på så sätt mellan olika inställningar. Nackdelen med detta, jämfört med exempelvis hur Topcon fungerar, är att överblicken av vilka inställningar som är aktuella försvagas då man måste in i mätprofilen för att se inställningarna som satts för denna. Därför är det viktigt att hålla reda på vilka inställningar som satts för varje mätprofil, alternativt ge mätprofilerna namn som är lättolkade och informativa. Liksom för Topcon, finns det här möjlighet att utesluta en specifik satellit direkt i handenheten L2C-signalen i svåra signalförhållanden Här presenteras resultaten från mätningarna i området kring Mårtsbo där punkter med varierande omgivningstäthet har mätts in under fem dagar. De två främsta parametrarna som undersökts är huruvida det är lättare att erhålla samt bibehålla fixlösning, och därmed öka tillgängligheten, vid inkluderandet av L2C-signalen, samt om mätosäkerheterna blir lägre. Resultaten skiljer sig en del från förväntningarna som fanns innan studien. Inkluderandet av L2C-signalen gav inte några tydliga tecken på varken minskad mätosäkerhet eller ökad möjlighet till fixlösning. Tendenser till förbättring finns i vissa fall, vid en del mätningar på några punkter, men i en del andra mätningar har signalen gett sämre resultat än när man exkluderat den Fixlösning De presenterade resultaten för erhållen fixlösning skiljer sig en del mellan de två roverutrustningarna eftersom att fabrikaten visade sig fungera olika i fält. I figur 10 visas den tid det tog i snitt för Leicas roverutrustning att erhålla fixlösning på varje punkt, baserat på antal sekunder från mätningens start. För Topcon (figur 11) presenteras istället den totala tiden, av den 900 sekunder långa mätningen, som mottagaren lyckades erhålla fixlösning. De beräknade värdena är i båda fall ett beräknat medelvärde från fem mätningar. 18
27 Tid (s) Tid (s) Leica - Tid till fixlösning Med L2C Utan L2C B D E F G Punkt nr. Figur 10. Diagram över medeltiden till fixlösning på varje punkt, för mätningar med Leica. Vid punkt E erhöll mätningarna med L2C fixlösning direkt och syns därför inte. 900 Topcon - Tid med fixlösning Med L2C Utan L2C B D E F G Punkt nr. Figur 11. Diagram över medeltiden med erhållen fixlösning på varje punkt, för mätningar med Topcon. 19
28 Mätosäkerheter och avvikelser De resultat som presenteras nedan baseras på fem mätningar vid varje punkt med utrustning från Leica respektive Topcon. I diagramen i figur 12 och 13 presenteras den radiella avvikelsen för de två utrustningarna. Figur 12. Diagram över de radiella medelavvikelserna vid varje punkt, för mätningar med Leica. Figur 13. Diagram över de radiella medelavvikelserna för varje punkt, givna av mätningar med Topcon. En sammanställning av standardosäkerheterna för varje punkt, med och utan L2C, presenteras i figur 14 för Leica och i figur 15 för Topcon. Samtliga standardosäkerheter baseras på fem mätningar. Figur 14. Diagram över de radiella standardosäkerheterna vid varje punkt, för mätningar med Leica. 20
29 Antan satelliter Figur 15. Diagram över de radiella standardosäkerheterna vid varje punkt, för mätningar med Topcon. En annan viktig parameterer att ta hänsyn till under mätningarna var om mätosäkerheter, avvikelser samt möjlighet till fixlösning berodde på antalet L2C-kompatibla satelliter som mottagaren hade kontakt med vid själva mätningstillfället. I diagrammen i figur 16 till 20 visas förhållandet mellan det totala antalet satelliter och L2C-kompatibla satelliter, för alla fem mätningar vid samtliga punkter. I figurerna går även att utläsa, och jämföra, den radiella avvikelsen för varje mätning vid samma punkter. I figur 23 syns att vid mätning nr. 3 så erhölls ingen lösning utan L2C, varför denna markerats grått och uteslutits från övriga beräkningar. 12 Punkt B - Satellitinformation, Leica Antal L2C-satelliter Totalt antal satelliter Mätning nr. Figur 16. Satellitinformation för mätningar vid punkt B med Leica 21
30 Antal satelliter Antal satelliter Punkt D - Satellitinformation, Leica Mätning nr. Antal L2C-satelliter Totalt antal satelliter Figur 17. Satellitinformation för mätningar vid punkt B med Leica 12 Punkt E - Satellitinformation, Leica Antal L2C-satelliter Totalt antal satelliter Mätning nr. Figur 18. Satellitinformation för mätningar vid punkt B med Leica 22
31 Antal satelliter Antal satelliter Punkt F - Satellitinformation, Leica Antal L2C-satelliter Totalt antal satelliter Mätning nr. Figur 19. Satellitinformation för mätningar vid punkt B med Leica Punkt G - Satellitinformation, Leica Antal L2C-satelliter Totalt antal satelliter Mätning nr. Figur 20. Satellitinformation för mätningar vid punkt B med Leica 23
32 Figur 21. Radiella avvikelser vid punkt B, för mätningar med Leica. Figur 22. Radiella avvikelser vid punkt B, för mätningar med Topcon. Figur 23. Radiella avvikelser vid punkt G, för mätningar med Leica. Gråmarkerad stapel innebär att ingen lösning kunde erhållas. Figur 24. Radiella avvikelser vid punkt G, för mätningar med Topcon. 24
33 4. Diskussion Här diskuteras de resultat som erhållits genom studien, samt tänkbara orsaker till de resultat som är avvikande. Här diskuteras även studiens upplägg samt tankar inför framtida studier Mätosäkerhet samt möjlighet till fixlösning I figur 10 visas tiden till erhållen fixlösning med Leica, medan figur 11 visar den totala tiden med fixlösning för Topcon. Att inte de två diagrammen, för Leica och Topcon respektive, presenterar exakt samma typ av resultat beror på att de två fabrikaten visade sig fungera olika i fält med avseende på vad som visas på handenheten i realtid. Topcon tenderade även till att växla mer mellan fix- och flytlösning än vad Leica gjorde. När Leica väl lyckades erhålla fixlösning höll den oftast hela mätningen ut. Det man kan se från resultatet som redovisas i dessa figurer är att Leica presterar bättre med L2C, jämfört med utan, på tre av fem punkter. Topcon presterar bara bättre med L2C på två av fem punkter, vilket gör att fördelen med signalen inte blir helt tydlig. Figurerna 12 och 13 visar de radiella medelavvikelserna, för både Topcon och Leica. Det som går att se är att mindre avvikelser ofta kan erhållas vid inkluderandet av L2Csignalen. Vid punkt D, för mätningar med Topcon, är avvikelsen avsevärt mycket mindre med L2C-signalen inkluderad. För Leica är det tydligast vid punkt B och G. Både Topcon och Leica presterar även bättre med L2C vid punkt E, även om skillnaden där är mindre. När båda inställningarna (med och utan L2C) gav små avvikelser (exempelvis vid punkt F), alltså ett förhållandevis bra resultat, har inget mönster gått att utläsa som skulle vara till fördel för L2C-signalen. Ofta har i dessa fall den minsta avvikelsen uppstått vid mätningen utan L2C, även om det inte skiljer mycket mellan dem. Det som går att utläsa är dock att användandet av L2C generellt gav betydligt mindre avvikelser på en av de punkter som klassats som svårast, punkt G. Speciellt tydligt är det för mätningar med Leica där L2C-signalen presterar bättre vid samtliga fem mätningar, enligt diagrammet i figur 23, jämfört med mätningarna utan L2C. För Topcon blir det inte lika tydligt. Det går att se i diagrammet i figur 24 att både vid mätning 2 och 3 blev avvikelserna mycket mindre med L2C-signalen. Dock så blev avvikelsen relativt mycket större med L2C än utan vid mätning 4, även om avvikelsen var stor även utan L2C. Från diagrammet i figur 22, alltså från punkt B, presterar dock Topcon bättre med L2C på fyra av fem mätningar. 25
34 Leica på samma punkt, figur 21, presterar bättre i två av fem mätningar, varav mätning nummer tre är mycket bättre. Vidare gav både Leica och Topcon lägre radiella standardosäkerheter med L2C på tre av fem punkter, enligt figur 14 och 15. Anmärkningsvärt är att Leica och Topcon ofta presterar olika om man ser till de radiella medelavvikelserna samt standardosäkerheterna, enligt figur Diagrammen i figur 16 till 20, visar satellitförhållandena vid mätningarna, och ansågs därför viktiga att analysera. Det går dock inte att se ett tydligt samband mellan antalet L2C-kompatibla satelliter och resultaten. Vissa mätningar med 4-5 L2C-satelliter vid en punkt, gav mindre avvikelser jämfört med mätningar av samma punkt där mottagaren haft kontakt med 6-7 L2C-satelliter, och tvärtom vid andra punkter och mätningar. Resultatet visar på att L2C-signalens förbättring är tydligast på de svåraste punkterna, B och G, samt även på punkt D som även den är en relativt svår punkt. Detta beror troligtvis på att L2C har en högre signalstyrka och därför kan tränga igenom trädkronor och andra hinder enklare. Dessutom är den bättre på att korrigera för flervägsfel, som är vanligt förekommande i miljöer som liknar de runt ovan nämnda punkter. I resultatet valdes att inte utesluta några mätningar på grund av för stora avvikelser, även om de låg över normala toleranser inom produktionsmätning. Detta för att resultatet inte skulle bli missvisande. Syftet var att testa om inkluderandet av L2C-signalen skulle visa på någon förbättring jämfört med mätningar utan denna. Då kan även en mätning med höga mätosäkerheter vara en förbättring, så länge samma mätning utan L2C ger en ännu högre mätosäkerhet. Mätning nr. 3 vid punkt G för Leica (figur 20) är dock ett undantag eftersom denna inte lyckades erhålla någon lösning alls och därmed ingen position Tänkbara anledningar till ouppnådda förväntningar Resultaten från studien visar på att det finns tendenser till att L2C-signalen ökar tillgängligheten samt sänker mätosäkerheterna i signalförsvårade miljöer. Dock inte i den utsträckning som från början förutspåddes. Mycket av den litteratur som analyserats under studien gav förhoppningar som signalen inte visade sig leva upp till fullständigt. Det finns flera tänkbara anledningar till detta, vilka diskuteras i detta avsnitt. 26
35 Tidigare i rapporten beskrivs det, bland annat av O Keefe, et al. (2009), att L2C-signalens främsta egenskap är att den kan korrigera för de jonosfäriska felen på ett bättre sätt än de tidigare signalerna, detta framförallt vid dubbelfrekvensmätning. Under de fem dagar som mätningarna gjordes, visade SWEPOS jonosfärsmonititor (bilaga A) på att jonosfärens påverkan på mätningarna kunde anses försumbar. Med detta menas att jonosfären inte påverkar mätosäkerheterna eller möjligheten att erhålla fixlösning märkbart. Hade mätningarna istället gjorts under dagar då de jonosfäriska förhållandena varit sämre, kunde resultatet möjligen blivit annorlunda. Då hade det, på ett helt annat sätt, varit möjligt att utvärdera denna egenskap hos signalen. Den andra tänkbara anledningen till varför resultaten inte blev som väntat, stöds också av en annan studie som gjorts av Farret et al. (2007). I deras studie visar författarna på att en för dåligt uppdaterad programvara i mottagarna kan bidra till att resultaten inte blir lika bra som man på förhand hade hoppats. Trots att deras studie gjordes för snart 10 år sedan så finns det anledning att tro att detta skulle kunna påverka resultaten även i detta examensarbete. Främst eftersom det inte har varit möjligt att mäta med L2C-signalen innan relativt nyligen. Eftersom satellitkonstellationen för L2C-signalen inte är komplett ännu, kanske inte programvarorna som finns tillgängliga i dagsläget är tillräckligt utvecklade för att erhålla ett fullgott resultat. Även antenntypen är en viktig parameter att ta i beaktning när man utför alla typer av GNSS-mätningar. I detta examensarbete testades enbart två olika typer av roverutrustningar, dvs. enbart två antennmodeller. För att få ett bredare resultat hade exempelvis fyra roverutrustningar med två olika antennmodeller från varje fabrikat, kunnat användas för att ge ett bredare resultat. På så sätt hade man även kunnat undersöka om olika typer av antenner är bättre på att ta emot och korrigera för felen när L2C-signalen används. Då det i denna studie enbart fanns tillgång till en roverutrustning av varje fabrikat så uppkom ett problem, som också det kan ha viss inverkan på det erhållna resultatet. När mätningarna med respektive utan L2C-signalen måste göras efter varandra, och inte parallellt, hinner satellitförhållandena ändras under tiden för den första mätningen. Dessa förändringar, såsom att en eller flera satelliter försvinner ur täckningsområdet, kan påverka resultatet eftersom mätningarna inte har samma förutsättningar. Tillgång till flera 27
36 roverutrustningar av samma typ hade kunnat eliminera detta och gett ett mer trovärdigt resultat. Mätning med nätverks-rtk är bra i många lägen. Det finns dock enligt en studie av Fredriksson & Olsson (2015) några få problem med denna metod i vissa mätförhållanden, speciellt då kontakten med närmaste referenssation blir dålig. Mätningar med hjälp av enkelstations-rtk hade därför varit ett intressant komplement till nätverks-rtkmätningarna, men på grund av tidsbrist kunde detta inte utföras under denna studie. Varierad längd på mätningarna kan vara en ytterligare aspekt att ha i beaktning. Enligt Mårtensson et al. (2012) så räcker mätningar under 60 s för att erhålla tillräckligt låga mätosäkerheter, med nätverks-rtk, för många projekt inom GNSS-baserad mätning. Eftersom mätningarna i detta examensarbete skedde i mer svårtillgängliga miljöer än i deras studie, så valdes mätningarna att göras längre. Detta för att kunna utvärdera hur parametrar, såsom möjlighet till fixlösning och minskade mätosäkerheter, förändras under mätningens gång. Den sista, men kanske den största, tänkbara orsaken till varför resultaten inte uppfyllde förväntningarna, är att det idag inte finns en full konstellation av satelliter som sänder ut L2C-signalen. I nuläget finns det endast 19 satelliter som är kompatibla med L2Csignalen vilket gör att systemet inte är helt världstäckande. Det syns tydligt på fältmätningarna som är gjorda i denna studie att antalet L2C-satelliter som används för att beräkna positionen varierar under dagen. Ett stabilt antal satelliter som är kompatibla med L2C-signalen skulle kunna ge ett mer pålitligt och bra resultat. Denna teori stöds av Effigis (2015), där GNSS-analytikern Daniel Macias Valadez säger följande om GPS modernisering: Even though the L2C signal looks promising, we still have to wait a few years before being able to take advantage of it. As of July 2015, out of 30 operational satellites, only 15 transmit L2C. Det bör även tilläggas att fler studier innan denna fått bristfälliga resultat med L2Csignalen, framförallt vid enkelfrekvensmätning. Exempelvis kommer Qaisar & Dempster (2008) i sin studie fram till att L1-signalen har lättare att erhålla en bättre lösning än L2Csignalen i signalsvaga områden. En teori utifrån detta skulle kunna vara att om mottagaren vid dubbelfrekvensmätning ibland tappar kontakten med L1-signalen men samtidigt lyckas bibehålla denna med L2C-signalen, så skulle detta eventuellt kunna leda till en 28
37 försämrad beräkning av distansen mellan mottagaren och satelliten. Detta skulle i så fall kunna påverka hela positioneringen negativt, speciellt om det sker för flera satelliter under samma mätning Framtida studier Under studien har en del idéer och tankar som kan vara bra att ha i åtanke vid framtida studier uppkommit. Det viktigaste är att göra tester då konstellationen är komplett, alltså med minst 24 L2C-kompatibla satelliter. Inte förrän då kan man säkert veta hur pass stor förbättring som signalen kan bidra med. Vid testerna kan det även vara bra att testa flera olika mätlängder samt metoder, exempelvis statisk mätning och enkelstations-rtk. Detta för att få en bättre överblick av i vilka olika situationer som L2C kan tillämpas bäst. Att göra fler mätningar för varje punkt skulle också ge starkare bevis för signalens funktion statistiskt. Hur signalen presterar vid enkelfrekvensmätning jämfört med L1 och den tidigare L2-signalen kan även det vara intressant att utvärdera. 29
38 5. Slutsats I detta examensarbete utvärderades L2C-signalens möjlighet till ökad tillgänglighet i signalförsvårande områden, samt hur den kan implementeras i tre olika fabrikat av GNSSutrustningar från Leica, Topcon och Trimble. Studien visade att L2C-signalen kan användas i alla tre av de testade roverutrustningarna. Dock kunde den inte väljas bort i direkt Leicas utrustning, så som den kunde för Topcon och Trimble. Vid mätningarna i fält kunde konstateras en stor fördel för Leica vid inkluderandet av L2C-signalen, åtminstone på de svåraste punkterna, G och B. Här syns det tydligt att den radiella medelavvikelsen är mycket lägre för mätningarna med L2C. Dock blir det inte lika tydligt för varje mätning enskilt, då resultatet trots allt är ganska varierande. Topcon har presterat betydligt bättre med L2C-signalen på punkt D. Utifrån detta ger L2C-signalen en antydan till förbättring vid mätning med nätverks- RTK i signalförsvårande miljöer, speciellt vid punkter där mätsvårigheten är som störst. Dock borde konstellationen färdigställas och testas ytterligare innan signalens fördelar kan konstateras helt. 30
39 Referenser Bagrov, A. V., Leonov, V. A., Mitkin, A. S., Nasyrov, A. F., Ponomarenko, A. D., Pichkhadze, K. M., & Sysoev, V. K. (2015). Single-satellite global positioning system. Acta Astronautica, 117, Doi: /j.actaastro Berber, M. & Arslan, N. (2013). Network RTK: A case study in Florida. Measurements, 46(8), Doi: /j.measurement Cao, Y. (2015). UAV circumnavigating an unknown target under a GPS-denied environment with range-only measurements. Automatica, 55, Doi: /j.automatica Chen, Q., Won, D., & Akos, D. (2014). Snow depth sensing using the GPS L2C signal with a dipole antenna. EURASIP Journal on Advances in Signal Processing, 2014(1), 106. Doi: / Cho, D, J., Park, C & Lee, S, J. (2004). An assisted GPS acquisition method using L2 Civil signal in weak signal environment. Journal of global positioning systems, 2004(3), Effigis. (2015). State of the GNSS Part 1:GPS modernization. Hämtad , från Farret, J. C., Carvalho Dos Santos, M. & Sukeova, L. (2009). Initial L2C multipath and noise performance analysis from real data. Boletim de Ciências Geodésicas, 15(3). Fredriksson, A. & Olsson, M. (2015). Jämförelse av höjdmätning med olika GNSSmottagare i SWEPOS Nätverks-RTK-tjänst (LMV-rapport 2015:1). Gävle: Lantmäteriet. Hämtad , från GPS. (u.å). New Civil Signals. Hämtad , från 31
40 HMK-Geodesi. (1996). Markering. Handbok i mät och kartfrågor. Hämtad , från HMK-Geodesi. (2015). GNSS baserad mätning. Handbok i mät och kartfrågor. Hämtad Irving, L. (2006). Benefits of the new GPS Civil signal The L2C Study. Inside GNSS, 2006(Juli/Augusti). Hämtad , från Kaartinen, H., Hyyppä, J., Vastaranta, M., Kukko, A., Jaakkola, A., Yu, X., Hyyppä, H. (2015). Accuracy of Kinematic Positioning Using Global Satellite Navigation Systems under Forest Canopies. Forests, 6(9), Doi: /f , från Lantmäteriet. (u.å,a). Felkällor vid GNSS-mätning. Hämtad , från matning/gps-och-satellitpositionering/metoder-for-gnss-matning/felkallor-vid- GNSS-matning/ Lantmäteriet. (u.å,b). RTK. Hämtad , från Lantmäteriet. (u.å.c). Nätverks-RTK. Hämtad , från Lilje, C., Engfeldt, A. & Jivall, C. (2007). Introduktion till GNSS (LMV-rapport 2007:11). Gävle: Lantmäteriet. Hämtad från 32
41 Marques, H. A. S., Monico, J. F. G. & Marques, H. A. (2015). Performance of the L2C civil GPS signal under various ionospheric scintillation effects. GPS Soulutions, 10291, Doi: /s Mauro, F., Valbuena, R., Manzanera, J. A. & García-Abril, A. (2011). Influence of Global Navigation Satellite System errors in positioning inventory plots for tree-height distribution studies. Canadian Journal of Forest Research, 41(1), Doi: /X Mubarak, O. M. & Dempster, A. G. (2010). Analysis of early late phase in single-and dual-frequency GPS receivers for multipath detection. GPS Solutions, 14(4), Doi: /s z Mårtensson, S.-G., Reshetyuk, Y. & Jivall, L. (2012) Measurment uncertainty in network RTK GNSS-based positioning of a terrestrial laser scanner. Journal of Applied Geodesy, 6(1), Doi: /jag O Keefe, K., Wang, D., Petovello, M. G., & Gernot, C. (2009, September 22-25). Benefit of Partial L2C Availability for Correcting Ionospheric Errors for Standalone GPS. Presenterat vid Proceedings of ION GNSS 2009: Session E4, Savannah, GA. Pirti, A., Gümüs, K., Erkaya, H & Hosbas, R, A. (2010). Evaluating repeatability of RTK GPS/GLONASS near/under forest environment. Croatian journal of forest engineering. 31(1), Qaisar, S, U & Dempster, A, G. (2008). Cross-correlation performance comparison of L1 & L2C GPS codes for weak signal acquisition. Proc. Int.Sym. on GPS/GNSS, Nov Radio-Electronics. (u.å). GPS Accuracy, Errors & Precision. Hämtad , från Schmidt, G. T. (2015). Navigation sensors and systems in GNSS degraded and denied environments. Chinese Journal of Aeronautics, 28(1), Doi: /j.cja
42 Song, Y., Xian, B., Zhang, Y., Jiang, X., & Zhang, X. (2015). Towards autonomous control of quadrotor unmanned aerial vehicles in a GPS-denied urban area via laser ranger finder. Optik - International Journal for Light and Electron Optics, 126(23), Doi: SWEPOS. (u.å.a). Om SWEPOS-stationerna. Hämtad , från SWEPOS. (u.å.b). Produktblad SWEPOS-tjänster. Hämtad , från Trimble. (u.å). Trimble GPS tutorial. Hämtad , från Zheng. J., Wang. Y. & Nihan, N. L. (2005). Quantitative evaluation of GPS performance under forest canopies. Proceedings IEEE Networking, Sensing and Control, doi: /icnsc
: Torsdag 21/4-2016 (Svealand): Fredag 22/4-2016")
43 Bilaga A: Jonosfärsmonitorer från SWEPOS Onsdag 13/ (Svealand): Fredag 15/ (Svealand): Torsdag 21/ (Svealand): Fredag 22/ (Svealand): 35

44 Bilaga B: Mätserier Leica 36
45 37
46 38
47 39
48 40

49 Bilaga C: Mätserier Topcon 41
50 42
51 43
Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst
 Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst I denna checklista redovisas en del allmänna råd angående hur nätverks-rtk-tekniken bör användas för att uppnå ett tillfredställande
Appendix 3 Checklista för höjdmätning mot SWEPOS Nätverks- RTK-tjänst I denna checklista redovisas en del allmänna råd angående hur nätverks-rtk-tekniken bör användas för att uppnå ett tillfredställande
Lantmäteriets testmätningar med RTK och Galileo i SWEPOS fram till januari 2017
 PM 2017-01-24 Lantmäteriets test med RTK och Galileo i SWEPOS fram till januari 2017 STEFAN ÖBERG, DAN NORIN, FREDRIK STEDT Sammanfattning SWEPOS Nätverks-RTK-tjänst har under många år använt kombinationen
PM 2017-01-24 Lantmäteriets test med RTK och Galileo i SWEPOS fram till januari 2017 STEFAN ÖBERG, DAN NORIN, FREDRIK STEDT Sammanfattning SWEPOS Nätverks-RTK-tjänst har under många år använt kombinationen
GPS del 2. Sadegh Jamali
 GPS del 2 Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 GPS-mätmetoder Absolut positionering (en
GPS del 2 Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 GPS-mätmetoder Absolut positionering (en
GNSS-mätning vid olika tidpunkter
 GNSS-mätning vid olika tidpunkter En studie om osäkerhet GNSS-measurements at different times A study of uncertainty Johan Törnvall Fakulteten för hälsa, natur- och teknikvetenskap Program: Mät- och kartteknikprogrammet
GNSS-mätning vid olika tidpunkter En studie om osäkerhet GNSS-measurements at different times A study of uncertainty Johan Törnvall Fakulteten för hälsa, natur- och teknikvetenskap Program: Mät- och kartteknikprogrammet
GNSS-status och Galileoanvändning
 GNSS-status och Galileoanvändning vid nätverks-rtk Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Stefan Öberg Lantmäteriet, stefan.oberg@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
GNSS-status och Galileoanvändning vid nätverks-rtk Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Stefan Öberg Lantmäteriet, stefan.oberg@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
GPS del 2. Sadegh Jamali. kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, och Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH)
; Lars Ollvik och Sven Agardh (LTH)") GPS del 2 Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, och Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Satellit positionering typer Absolut positionering (en
GPS del 2 Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, och Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Satellit positionering typer Absolut positionering (en
Introduktion till GNSS
 Introduktion till GNSS Christina Lilje SWEPOS-seminariet 16 oktober 2007 Gävle Satellitsystem GNSS - Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering och positionsbestämning
Introduktion till GNSS Christina Lilje SWEPOS-seminariet 16 oktober 2007 Gävle Satellitsystem GNSS - Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering och positionsbestämning
Bilaga 1: GPS-teknik, en liten ordlista
 Bilaga 1: GPS-teknik, en liten ordlista SATELLITSYSTEM GPS Global Positioning System. Amerikanskt satellitbaserat navigationssystem uppbyggt av USA:s försvarsmakt. Systemet är globalt täckande och används
Bilaga 1: GPS-teknik, en liten ordlista SATELLITSYSTEM GPS Global Positioning System. Amerikanskt satellitbaserat navigationssystem uppbyggt av USA:s försvarsmakt. Systemet är globalt täckande och används
Forskning GNSS. Grundkonfigurationen av GPS består av 24 satelliter men idag cirkulerar närmare 30 satelliter runt jordklotet
 Forskning GNSS GNSS (Global Navigation Satellite Systems) är samlingsnamnet för globala satellitbaserade system för navigation, positionsbestämning och tidsöverföring. Det mest kända och använda systemet
Forskning GNSS GNSS (Global Navigation Satellite Systems) är samlingsnamnet för globala satellitbaserade system för navigation, positionsbestämning och tidsöverföring. Det mest kända och använda systemet
Global Positionering System (GPS)
") Global Positionering System (GPS) Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder
Global Positionering System (GPS) Sadegh Jamali Baserat på material från: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder
Jämförelse av höjdmätning med olika GNSS-mottagare i SWEPOS nätverks-rtk-tjänst
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Jämförelse av höjdmätning med olika GNSS-mottagare i SWEPOS nätverks-rtk-tjänst Annika Fredriksson & Madeleine
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Jämförelse av höjdmätning med olika GNSS-mottagare i SWEPOS nätverks-rtk-tjänst Annika Fredriksson & Madeleine
Global Positionering System (GPS)
") Global Positionering System (GPS) Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder i lantmäteri
Global Positionering System (GPS) Sadegh Jamali kredit: Mohammad Bagherbandi, Stig-Göran Mårtensson, Faramarz Nilfouroushan (HIG); Lars Ollvik och Sven Agardh (LTH) 1 Traditionella metoder i lantmäteri
EXAMENSARBETE. Totalstation jämförd med mmgps. David Olsson. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Totalstation jämförd med mmgps David Olsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Totalstation jämförd med mmgps
EXAMENSARBETE Totalstation jämförd med mmgps David Olsson Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Totalstation jämförd med mmgps
Galileos påverkan vid Nätverks-RTK satellitpositionering i svåra miljöer
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan vid Nätverks-RTK satellitpositionering i svåra miljöer Stefan Johansson & Petter Tysk 2017
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan vid Nätverks-RTK satellitpositionering i svåra miljöer Stefan Johansson & Petter Tysk 2017
Galileos påverkan på snabb statisk mätning vid korta baslinjer
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan på snabb statisk mätning vid korta baslinjer Per Eklund & Elias Olofsson 2018 Examensarbete,
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Galileos påverkan på snabb statisk mätning vid korta baslinjer Per Eklund & Elias Olofsson 2018 Examensarbete,
Undersökning av nätverks-rtk-meddelande tillsammans med olika GNSS-mottagare
 Undersökning av nätverks-rtk-meddelande tillsammans med olika GNSS-mottagare vid nätverks-rtk-mätning i SWEPOS -nät av fasta referensstationer Rebecka Lundell 2012 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik
Undersökning av nätverks-rtk-meddelande tillsammans med olika GNSS-mottagare vid nätverks-rtk-mätning i SWEPOS -nät av fasta referensstationer Rebecka Lundell 2012 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik
Undersökning av mätosäkerheten i det förtätade SWEPOS -nätet i Stockholmsområdet
 Undersökning av mätosäkerheten i det förtätade SWEPOS -nätet i Stockholmsområdet vid mätning med nätverks-rtk Jakob Jansson 2011 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik Lantmätarprogrammet
Undersökning av mätosäkerheten i det förtätade SWEPOS -nätet i Stockholmsområdet vid mätning med nätverks-rtk Jakob Jansson 2011 Examensarbete, kandidatnivå, 15 hp Lantmäteriteknik Lantmätarprogrammet
EXAMENSARBETE. Val av mätinstrument. Eli Ellvall Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Val av mätinstrument Eli Ellvall 2015 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser ( Val av mätinstrument Eli Ellvall
EXAMENSARBETE Val av mätinstrument Eli Ellvall 2015 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser ( Val av mätinstrument Eli Ellvall
Jämförelse av höjdmätning med olika GNSSmottagare. SWEPOS Nätverks-RTKtjänst
 Lantmäterirapport 2015:1 Rapportserie: Geodesi och Geografiska informationssystem Jämförelse av höjdmätning med olika GNSSmottagare i SWEPOS Nätverks-RTKtjänst Examensarbete av Annika Fredriksson & Madeleine
Lantmäterirapport 2015:1 Rapportserie: Geodesi och Geografiska informationssystem Jämförelse av höjdmätning med olika GNSSmottagare i SWEPOS Nätverks-RTKtjänst Examensarbete av Annika Fredriksson & Madeleine
Undersökning av mätosäkerheten i det förtätade SWEPOS-nätet i Stockholmsområdet
 LMV-Rapport 2011:2 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av mätosäkerheten i det förtätade SWEPOS-nätet i Stockholmsområdet vid mätning med nätverks-rtk Examensarbete av
LMV-Rapport 2011:2 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av mätosäkerheten i det förtätade SWEPOS-nätet i Stockholmsområdet vid mätning med nätverks-rtk Examensarbete av
Undersökning av. tillsammans med olika GNSSmottagare
 Lantmäterirapport 2012:3 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av nätverks-rtkmeddelande tillsammans med olika GNSSmottagare vid nätverks-rtk-mätning i SWEPOS nät av fasta
Lantmäterirapport 2012:3 Rapportserie: Geodesi och Geografiska informationssystem Undersökning av nätverks-rtkmeddelande tillsammans med olika GNSSmottagare vid nätverks-rtk-mätning i SWEPOS nät av fasta
Global Positioning System GPS i funktion
 Global Positioning System GPS i funktion Martin Åhlenius ECOP mas00001@student.mdh.se Andreas Axelsen ECOP aan00006@student.mdh.se 15 oktober 2003 i Sammanfattning Denna rapport försöker förklara funktionen
Global Positioning System GPS i funktion Martin Åhlenius ECOP mas00001@student.mdh.se Andreas Axelsen ECOP aan00006@student.mdh.se 15 oktober 2003 i Sammanfattning Denna rapport försöker förklara funktionen
Global Positioning System GPS
 Global Positioning System GPS (Navstar 2) Mahtab Nasiri mni03001@student.mdh.se CIDEV 2 Handledare: Gordana Dodig Grnkovic Västerås 2004-10-18 Sammanfattning Syftet med denna rapport är att ge en grundläggande
Global Positioning System GPS (Navstar 2) Mahtab Nasiri mni03001@student.mdh.se CIDEV 2 Handledare: Gordana Dodig Grnkovic Västerås 2004-10-18 Sammanfattning Syftet med denna rapport är att ge en grundläggande
Vilka konsekvenser kan solstormar. Lund 21 maj 2012. Gunnar Hedling och Peter Wiklund gunnar.hedling@lm.se Ragne Emardsson och Per Jarlemark SP
 Vilka konsekvenser kan solstormar ha för GNSS-användningen? Seminariedag Solstormar I samhället Lund 21 maj 2012 Gunnar Hedling och Peter Wiklund gunnar.hedling@lm.se Ragne Emardsson och Per Jarlemark
Vilka konsekvenser kan solstormar ha för GNSS-användningen? Seminariedag Solstormar I samhället Lund 21 maj 2012 Gunnar Hedling och Peter Wiklund gunnar.hedling@lm.se Ragne Emardsson och Per Jarlemark
Vad är god kvalitet vid mätning med GNSS/RTK?
 Vad är god kvalitet vid mätning med GNSS/RTK? MBK-dag, 4 november 2015 Lars Jämtnäs Enheten för geodetisk infrastruktur lars.jamtnas@lm.se Att bedöma kvalitet vid realtidsmätning Finns det något att jämföra
Vad är god kvalitet vid mätning med GNSS/RTK? MBK-dag, 4 november 2015 Lars Jämtnäs Enheten för geodetisk infrastruktur lars.jamtnas@lm.se Att bedöma kvalitet vid realtidsmätning Finns det något att jämföra
SWEPOS status och utveckling
 SWEPOS status och utveckling MBK temadag Rankhyttan 2015-11-04 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se SWEPOS Nationellt nät av fasta referensstationer för GNSS som är en
SWEPOS status och utveckling MBK temadag Rankhyttan 2015-11-04 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se SWEPOS Nationellt nät av fasta referensstationer för GNSS som är en
Studie av mätosäkerhet och tidskorrelationer vid mätning med. SWEPOS 35 km-nät
 Lantmäterirapport 2014:5 Rapportserie: Geodesi och Geografiska informationssystem Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i SWEPOS 35 km-nät Examensarbete av Kent Ohlsson
Lantmäterirapport 2014:5 Rapportserie: Geodesi och Geografiska informationssystem Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i SWEPOS 35 km-nät Examensarbete av Kent Ohlsson
Förord. Gävle, april 2007
 LMV -Rapport 27:1 Rapportserie: Geodesi och Geografiska informationssystem En nä tverks-rtk - jä mfö relse mellan GP S och GP S/GLO N A SS Exam ensarbete av Fredrik Johnsson och Mattias W allerström G
LMV -Rapport 27:1 Rapportserie: Geodesi och Geografiska informationssystem En nä tverks-rtk - jä mfö relse mellan GP S och GP S/GLO N A SS Exam ensarbete av Fredrik Johnsson och Mattias W allerström G
En osäkerhetsundersökning av GNSS-mottagare
 En osäkerhetsundersökning av GNSS-mottagare An investigation of GNSS receiver uncertainty Jonas Törnqvist Fakultet: Fakulteten för hälsa, natur och teknikvetenskap Program: Mät- och kartteknikprogrammet
En osäkerhetsundersökning av GNSS-mottagare An investigation of GNSS receiver uncertainty Jonas Törnqvist Fakultet: Fakulteten för hälsa, natur och teknikvetenskap Program: Mät- och kartteknikprogrammet
Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik
 Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik I checklistan redovisas hur GNSS-tekniken bör användas vid klassisk statisk stomnätsmätning. Syftet
Appendix 1 - Checklista för etablering av punkter i RH 2000 genom stomnätsmätning med statisk GNSSteknik I checklistan redovisas hur GNSS-tekniken bör användas vid klassisk statisk stomnätsmätning. Syftet
Grundläggande teori om GNSS
 Grundläggande teori om GNSS Termen satellitmätning refererar till alla metoder som använder satelliter som referenspunkter för positionsbestämning. Idag (2010) finns det två fungerande satellitbaserade
Grundläggande teori om GNSS Termen satellitmätning refererar till alla metoder som använder satelliter som referenspunkter för positionsbestämning. Idag (2010) finns det två fungerande satellitbaserade
Trimtec.se - Auktoriserad Trimble dealer för hela Sverige
 Trimtec.se - Auktoriserad Trimble dealer för hela Sverige Auktoriserad Trimble återförsäljare Service Support Utbildning Uthyrning Försäljning Gatewing Vad vi kan erbjuda! Skanning Tillbehör Service Survey
Trimtec.se - Auktoriserad Trimble dealer för hela Sverige Auktoriserad Trimble återförsäljare Service Support Utbildning Uthyrning Försäljning Gatewing Vad vi kan erbjuda! Skanning Tillbehör Service Survey
Projektmodell med kunskapshantering anpassad för Svenska Mässan Koncernen
 Examensarbete Projektmodell med kunskapshantering anpassad för Svenska Mässan Koncernen Malin Carlström, Sandra Mårtensson 2010-05-21 Ämne: Informationslogistik Nivå: Kandidat Kurskod: 2IL00E Projektmodell
Examensarbete Projektmodell med kunskapshantering anpassad för Svenska Mässan Koncernen Malin Carlström, Sandra Mårtensson 2010-05-21 Ämne: Informationslogistik Nivå: Kandidat Kurskod: 2IL00E Projektmodell
Galileos utveckling till att bli en del av praktisk GNSSanvändning
 2018-03-09 PM Artikel publicerad i Sveriges Kart- & Mätningstekniska Förenings (SKMF:s) tidskrift Sinus, nr 1 2018, sid 26 28 Galileos utveckling till att bli en del av praktisk GNSSanvändning DAN NORIN
2018-03-09 PM Artikel publicerad i Sveriges Kart- & Mätningstekniska Förenings (SKMF:s) tidskrift Sinus, nr 1 2018, sid 26 28 Galileos utveckling till att bli en del av praktisk GNSSanvändning DAN NORIN
Test av GNSSmottagare. DataGrid
 LMV-Rapport 2010:7 Rapportserie: Geodesi och Geografiska informationssystem Test av GNSSmottagare från DataGrid Examensarbete av Jonas Lord Gävle 2010 L A N T M Ä T E R I E T Copyright 2010-08-16 Författare
LMV-Rapport 2010:7 Rapportserie: Geodesi och Geografiska informationssystem Test av GNSSmottagare från DataGrid Examensarbete av Jonas Lord Gävle 2010 L A N T M Ä T E R I E T Copyright 2010-08-16 Författare
Att ta fram en restfelsmodell
 L A N T M Ä T E R I E T Lantmäteriverket Informationsförsörjning BYTE AV REFERENSSYSTEM 1 (17) Geodetiska utvecklingsenheten SWEREF 99 Tina Kempe, Géza Lohász 2011-01-27 Ver. 3.2 Att ta fram en restfelsmodell
L A N T M Ä T E R I E T Lantmäteriverket Informationsförsörjning BYTE AV REFERENSSYSTEM 1 (17) Geodetiska utvecklingsenheten SWEREF 99 Tina Kempe, Géza Lohász 2011-01-27 Ver. 3.2 Att ta fram en restfelsmodell
Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning
 Fakulteten för humaniora och samhällsvetenskap Naturgeografi Magnus Wallsten Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning Comparison
Fakulteten för humaniora och samhällsvetenskap Naturgeografi Magnus Wallsten Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning Comparison
Utvärdering av olika metoder för stationsetablering med n-rtk
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Utvärdering av olika metoder för stationsetablering med n-rtk Vilhelm Svensson & Fredrik Tobler 2018 Examensarbete,
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Utvärdering av olika metoder för stationsetablering med n-rtk Vilhelm Svensson & Fredrik Tobler 2018 Examensarbete,
 LMV -Rapport 27:8 Rapportserie: Geodesi och Geografiska informationssystem Jä mfö relse av distrib u tionskanaler fö r projektanpassad nä tverks-rtk Exam ensarbete av D aniel H alvardsson & Joakim Johansson
LMV -Rapport 27:8 Rapportserie: Geodesi och Geografiska informationssystem Jä mfö relse av distrib u tionskanaler fö r projektanpassad nä tverks-rtk Exam ensarbete av D aniel H alvardsson & Joakim Johansson
Radio-ockultation med GNSS för atmosfärsmätningar
 Radio-ockultation med GNSS för atmosfärsmätningar Rymdforum 9-10 mars 2015 Joel Rasch Molflow Innehåll Radio-ockultation, kort historik Radio-ockultation med GNSS Dagens satelliter Användningsområden 2
Radio-ockultation med GNSS för atmosfärsmätningar Rymdforum 9-10 mars 2015 Joel Rasch Molflow Innehåll Radio-ockultation, kort historik Radio-ockultation med GNSS Dagens satelliter Användningsområden 2
SWEPOS. Studiebesök från SAMGIS Västernorrland Peter Wiklund Lantmäteriet, Geodetisk infrastruktur
 SWEPOS Studiebesök från SAMGIS Västernorrland 2016-02-24 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se Geodetisk infrastruktur Vår vision är att tillgodose samhällets behov av
SWEPOS Studiebesök från SAMGIS Västernorrland 2016-02-24 Peter Wiklund Lantmäteriet, Geodetisk infrastruktur peter.wiklund@lm.se Geodetisk infrastruktur Vår vision är att tillgodose samhällets behov av
Fördröjning och bortfall av nätverkskorrektioner
 Fördröjning och bortfall av nätverkskorrektioner osäkerhetskällor för nätverks-rtk? Lena Morén och Matilda Stenbacka 2013 Examensarbete, Grundnivå (kandidatexamen), 15 hp Lantmäteriteknik Lantmätarprogrammet.
Fördröjning och bortfall av nätverkskorrektioner osäkerhetskällor för nätverks-rtk? Lena Morén och Matilda Stenbacka 2013 Examensarbete, Grundnivå (kandidatexamen), 15 hp Lantmäteriteknik Lantmätarprogrammet.
Realtidsuppdaterad fristation
 Precisionsanalys Januari 2009 Milan Horemuz Kungliga Tekniska högskolan, Institution för transporter och samhällsekonomi Avdelningen för Geodesi Teknikringen 72, SE 100 44 Stockholm e-post: horemuz@kth.se
Precisionsanalys Januari 2009 Milan Horemuz Kungliga Tekniska högskolan, Institution för transporter och samhällsekonomi Avdelningen för Geodesi Teknikringen 72, SE 100 44 Stockholm e-post: horemuz@kth.se
Position Nokia N76-1
 Nokia N76-1 2007 Nokia. Alla rättigheter förbehållna. Nokia, Nokia Connecting People, Nseries och N76 är registrerade varumärken som tillhör Nokia Corporation. Andra produkt- och företagsnamn som det hänvisats
Nokia N76-1 2007 Nokia. Alla rättigheter förbehållna. Nokia, Nokia Connecting People, Nseries och N76 är registrerade varumärken som tillhör Nokia Corporation. Andra produkt- och företagsnamn som det hänvisats
En noggrannhetsjämförelse. Nätverks-RTK och Nätverks-DGPS
 LMV-Rapport 25:3 Rapportserie: Geodesi och Geografiska informationssystem En noggrannhetsjämförelse mellan Nätverks-RTK och Nätverks-DGPS Magnus Ahrenberg & Andreas Olofsson Examensarbete Gävle 25 L A
LMV-Rapport 25:3 Rapportserie: Geodesi och Geografiska informationssystem En noggrannhetsjämförelse mellan Nätverks-RTK och Nätverks-DGPS Magnus Ahrenberg & Andreas Olofsson Examensarbete Gävle 25 L A
Hur används GNSS-tekniken idag och i framtiden. GIS-Samverkan Dalarna Falun 14 mars 2018 Kent Ohlsson
 Hur används GNSS-tekniken idag och i framtiden GIS-Samverkan Dalarna Falun 14 mars 2018 Kent Ohlsson Vad är GNSS? GNSS Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering
Hur används GNSS-tekniken idag och i framtiden GIS-Samverkan Dalarna Falun 14 mars 2018 Kent Ohlsson Vad är GNSS? GNSS Global Navigation Satellite Systems Samlingsnamn för satellitsystem för navigering
GPS. Robin Rikberg 30029. 16 februari 2009
 GPS Robin Rikberg 30029 16 februari 2009 Innehåll 1 Inledning 1 2 Satellitnavigeringens historia och framtid 1 2.1 Transit.............................. 1 2.2 GPS............................... 1 2.3 GLONASS...........................
GPS Robin Rikberg 30029 16 februari 2009 Innehåll 1 Inledning 1 2 Satellitnavigeringens historia och framtid 1 2.1 Transit.............................. 1 2.2 GPS............................... 1 2.3 GLONASS...........................
Underlag till metodbeskrivning RUFRIS
 Uppdragsnr: 10141701 1 (7) PM Underlag till metodbeskrivning RUFRIS Upprättad av: Johan Vium Andersson, WSP Samhällsbyggnad 2011-11-09 WSP Samhällsbyggnad 121 88 Stockholm-Globen Besök: Arenavägen 7 Tel:
Uppdragsnr: 10141701 1 (7) PM Underlag till metodbeskrivning RUFRIS Upprättad av: Johan Vium Andersson, WSP Samhällsbyggnad 2011-11-09 WSP Samhällsbyggnad 121 88 Stockholm-Globen Besök: Arenavägen 7 Tel:
Metodbeskrivning RUFRIS
 Metodbeskrivning RUFRIS Dokumenttitel: Underlag till metodbeskrivning RUFRIS Skapat av: Johan Vium Andersson Dokumentdatum: 2012-03-16 Dokumenttyp: Rapport Publikationsnummer 2012:210 Version: 1,0 Publiceringsdatum:
Metodbeskrivning RUFRIS Dokumenttitel: Underlag till metodbeskrivning RUFRIS Skapat av: Johan Vium Andersson Dokumentdatum: 2012-03-16 Dokumenttyp: Rapport Publikationsnummer 2012:210 Version: 1,0 Publiceringsdatum:
Förväntad mätosäkerhet vid realtidsuppdaterad fri stationsetablering
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Förväntad mätosäkerhet vid realtidsuppdaterad fri stationsetablering En jämförelsestudie av olika fabrikat Daniel
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Förväntad mätosäkerhet vid realtidsuppdaterad fri stationsetablering En jämförelsestudie av olika fabrikat Daniel
Utvärdering av olika metoder för stationsetablering
 Lantmäterirapport 2018:3 Rapportserie: Geodesi och Geografiska informationssystem Utvärdering av olika metoder för stationsetablering med nätverks-rtk Examensarbete av Vilhelm Svensson & Fredrik Tobler
Lantmäterirapport 2018:3 Rapportserie: Geodesi och Geografiska informationssystem Utvärdering av olika metoder för stationsetablering med nätverks-rtk Examensarbete av Vilhelm Svensson & Fredrik Tobler
Jämförelse av olika GNSS-mottagare
 Jämförelse av olika GNSS-mottagare Mätnoggrannhet i plan och höjd vid användande av nätverks-rtk Comparing GNSS Receivers Horizontal and Vertical Accuracy using Network RTK Andreas Larsson och Patrik Söder
Jämförelse av olika GNSS-mottagare Mätnoggrannhet i plan och höjd vid användande av nätverks-rtk Comparing GNSS Receivers Horizontal and Vertical Accuracy using Network RTK Andreas Larsson och Patrik Söder
Framtida satellitsystem och signaler - fördelar och utmaningar
 Framtida satellitsystem och signaler - fördelar och utmaningar G P S Jan Johansson Rymd och geovetenskap med Onsala rymdobservatorium, Chalmers tekniska högskola & SP Sveriges tekniska forskningsinstitut
Framtida satellitsystem och signaler - fördelar och utmaningar G P S Jan Johansson Rymd och geovetenskap med Onsala rymdobservatorium, Chalmers tekniska högskola & SP Sveriges tekniska forskningsinstitut
Faktorer som påverkar osäkerhet hos digitala terrängmodeller från UASdata
 Faktorer som påverkar osäkerhet hos digitala terrängmodeller från UASdata 2014-11-24 Yuriy Reshetyuk Stig-Göran Mårtensson Faktorer Matchningsalgoritmer Osäkerhet hos DTM Osäkerhet hos yttre orienteringsparametrar
Faktorer som påverkar osäkerhet hos digitala terrängmodeller från UASdata 2014-11-24 Yuriy Reshetyuk Stig-Göran Mårtensson Faktorer Matchningsalgoritmer Osäkerhet hos DTM Osäkerhet hos yttre orienteringsparametrar
Förord. Gävle, juni 2008
 LMV -Rapport 2008:4 R a p p ortserie: G eod esi och G eogra fisk a inform a tionssystem K o m m u n ik a tio n sa ltern a tiv fö r n ä tverk s-r TK virtuell referensstation kontra nätverksm eddelande Exam
LMV -Rapport 2008:4 R a p p ortserie: G eod esi och G eogra fisk a inform a tionssystem K o m m u n ik a tio n sa ltern a tiv fö r n ä tverk s-r TK virtuell referensstation kontra nätverksm eddelande Exam
4/29/2011. Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl maj, 2011.
 FÖRSÄTTSBLAD 4/29/2011 Institutionen för Geo- och Ekosystemvetenskaper Institutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 2 maj, 2011. Besvara frågor till
FÖRSÄTTSBLAD 4/29/2011 Institutionen för Geo- och Ekosystemvetenskaper Institutionen för Teknik och Samhälle Frågor för tentamen EXTA50 Samhällsmätning, 9 hp, kl. 8-13 2 maj, 2011. Besvara frågor till
1 Tekniska förutsättningar; geodetiska referenssystem
 BILAGA 1 Bilaga till Rapporten Koordinatbestämda gränser, 2017-03-27, Dnr 508-2017/939 1 Tekniska förutsättningar; geodetiska referenssystem Grunden för den geodetiska infrastrukturen utgörs av referenssystemen,
BILAGA 1 Bilaga till Rapporten Koordinatbestämda gränser, 2017-03-27, Dnr 508-2017/939 1 Tekniska förutsättningar; geodetiska referenssystem Grunden för den geodetiska infrastrukturen utgörs av referenssystemen,
Syns du, finns du? Examensarbete 15 hp kandidatnivå Medie- och kommunikationsvetenskap
 Examensarbete 15 hp kandidatnivå Medie- och kommunikationsvetenskap Syns du, finns du? - En studie över användningen av SEO, PPC och sociala medier som strategiska kommunikationsverktyg i svenska företag
Examensarbete 15 hp kandidatnivå Medie- och kommunikationsvetenskap Syns du, finns du? - En studie över användningen av SEO, PPC och sociala medier som strategiska kommunikationsverktyg i svenska företag
RUFRIS vs Trepunktsmetoden
 RUFRIS vs Trepunktsmetoden - en jämförelse vid etablering av nya utgångspunkter Sara Dannberg Maria Norrman Institutionen för ingenjörsvetenskap Lantmäteriingenjörsprogrammet EXC575 2014-06-04 Sammanfattning
RUFRIS vs Trepunktsmetoden - en jämförelse vid etablering av nya utgångspunkter Sara Dannberg Maria Norrman Institutionen för ingenjörsvetenskap Lantmäteriingenjörsprogrammet EXC575 2014-06-04 Sammanfattning
En nätverks-rtk-jämförelse mellan GPS och GPS/GLONASS
 INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ En nätverks-rtk-jämförelse mellan GPS och GPS/GLONASS Fredrik Johnsson och Mattias Wallerström April 27 C-uppsats 1p i Geomatik Geomatikprogrammet Examinator: Stig-Göran
INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ En nätverks-rtk-jämförelse mellan GPS och GPS/GLONASS Fredrik Johnsson och Mattias Wallerström April 27 C-uppsats 1p i Geomatik Geomatikprogrammet Examinator: Stig-Göran
Inmätning av dold punkt
 Inmätning av dold punkt En jämförelse mellan mätmetoderna RUFRIS, dubbla avstånd och ortogonal inmätning Measuring of hidden points A comparison of the measure methods RUFRIS, Two distances and Backwards
Inmätning av dold punkt En jämförelse mellan mätmetoderna RUFRIS, dubbla avstånd och ortogonal inmätning Measuring of hidden points A comparison of the measure methods RUFRIS, Two distances and Backwards
MÄTNINGAR INFÖR BYTE AV REFERENSSYSTEM I PLAN I OCKELBO KOMMUN
 INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ MÄTNINGAR INFÖR BYTE AV REFERENSSYSTEM I PLAN I OCKELBO KOMMUN Johanna Eriksson och Isak Svärd Juni 2009 Examensarbete 15 hp B-nivå Geomatik Geomatikprogrammet
INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ MÄTNINGAR INFÖR BYTE AV REFERENSSYSTEM I PLAN I OCKELBO KOMMUN Johanna Eriksson och Isak Svärd Juni 2009 Examensarbete 15 hp B-nivå Geomatik Geomatikprogrammet
Kommunikationsalternativ för nätverks-rtk - virtuell referensstation kontra nätverksmeddelande
 INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ Kommunikationsalternativ för nätverks-rtk - virtuell referensstation kontra nätverksmeddelande Daniel Johansson Sören Persson Juni 2008 Examensarbete C-nivå, 15
INSTITUTIONEN FÖR TEKNIK OCH BYGGD MILJÖ Kommunikationsalternativ för nätverks-rtk - virtuell referensstation kontra nätverksmeddelande Daniel Johansson Sören Persson Juni 2008 Examensarbete C-nivå, 15
HMK. Geodesi: GNSS-baserad mätning. handbok i mät- och kartfrågor
 HMK handbok i mät- och kartfrågor Geodesi: GNSS-baserad mätning Arbetsdokument juli 2015 Förord juli 2015 HMK-Geodesi arbetsdokument 2015 består av fyra dokument som tillsammans utgör HMK-Geodesi. Dokumentet
HMK handbok i mät- och kartfrågor Geodesi: GNSS-baserad mätning Arbetsdokument juli 2015 Förord juli 2015 HMK-Geodesi arbetsdokument 2015 består av fyra dokument som tillsammans utgör HMK-Geodesi. Dokumentet
HMK. Remissversion. Geodesi: GNSS-baserad detaljmätning. handbok i mät- och kartfrågor
 HMK handbok i mät- och kartfrågor Remissversion Geodesi: GNSS-baserad detaljmätning 2015 Förord november 2015 Remissversionen baseras på arbetsdokumentet HMK-Geodesi: GNSS-baserad mätning som publicerades
HMK handbok i mät- och kartfrågor Remissversion Geodesi: GNSS-baserad detaljmätning 2015 Förord november 2015 Remissversionen baseras på arbetsdokumentet HMK-Geodesi: GNSS-baserad mätning som publicerades
Strategi för datadistribution
 Uppdragsnr: 10141701 1 (8) PM Strategi för datadistribution Upprättad av: Helena von Malmborg, WSP Samhällsbyggnad Sara Hederos, WSP Samhällsbyggnad Stockholm 2011-11-21 WSP Samhällsbyggnad 121 88 Stockholm-Globen
Uppdragsnr: 10141701 1 (8) PM Strategi för datadistribution Upprättad av: Helena von Malmborg, WSP Samhällsbyggnad Sara Hederos, WSP Samhällsbyggnad Stockholm 2011-11-21 WSP Samhällsbyggnad 121 88 Stockholm-Globen
Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i Swepos 35 km-nät
 Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i Swepos 35 km-nät Kent Ohlsson Master of Science Thesis in Geodesy No. 3132 TRITA-GIT EX 14-008 School of Architecture and the
Studie av mätosäkerhet och tidskorrelationer vid mätning med nätverks-rtk i Swepos 35 km-nät Kent Ohlsson Master of Science Thesis in Geodesy No. 3132 TRITA-GIT EX 14-008 School of Architecture and the
RAPPORT. Höjdmätning med RUFRIS
 RAPPORT Höjdmätning med RUFRIS Trafikverket Postadress: Rödavägen 1, 781 89 Borlänge E-post: trafikverket@trafikverket.se Telefon: 0771-921 921 TMALL 0004 Rapport generell v 2.0 Dokumenttitel: Höjdmätning
RAPPORT Höjdmätning med RUFRIS Trafikverket Postadress: Rödavägen 1, 781 89 Borlänge E-post: trafikverket@trafikverket.se Telefon: 0771-921 921 TMALL 0004 Rapport generell v 2.0 Dokumenttitel: Höjdmätning
Förtätning av nätverks-rtk i nordvästra Skåne
 STADSBYGGNADSFÖRVALTNINGEN STADSMILJÖ KART OCH MÄT Förtätning av nätverks-rtk i nordvästra Skåne 2017-11-10 Sida 1 Swepos nätverks-rtk referensstationer Nationellt nät av fasta referensstationer för GNSS
STADSBYGGNADSFÖRVALTNINGEN STADSMILJÖ KART OCH MÄT Förtätning av nätverks-rtk i nordvästra Skåne 2017-11-10 Sida 1 Swepos nätverks-rtk referensstationer Nationellt nät av fasta referensstationer för GNSS
Metoder för att etablera fri station
 Metoder för att etablera fri station En jämförelsestudie av GNSS-etableringar och traditionell etablering Methods to establish free station A comparison study of GNSS-establishment and traditional establishment
Metoder för att etablera fri station En jämförelsestudie av GNSS-etableringar och traditionell etablering Methods to establish free station A comparison study of GNSS-establishment and traditional establishment
Förord. Östersund, oktober 2007 Ida Magni
 LMV -Rapport 2007:9 Kan Nätverks-D G P S b id ra till att effektivisera natu rreservatsm ätning en u tvärd ering av m ätno g g rannh et o ch använd arasp ekter Exam ensarbete av Ida Magni G ävle 2007 L
LMV -Rapport 2007:9 Kan Nätverks-D G P S b id ra till att effektivisera natu rreservatsm ätning en u tvärd ering av m ätno g g rannh et o ch använd arasp ekter Exam ensarbete av Ida Magni G ävle 2007 L
Praktisk GNSS-mätning. Tips och tricks Ronny Andersson, Metria
 Praktisk GNSS-mätning Tips och tricks Ronny Andersson, Metria Vem är då jag? Ronny Andersson Jobbar som teknisk lantmätare på Metrias geodesienhet i Gävle. Mätansvarig i många olika typer av uppdrag och
Praktisk GNSS-mätning Tips och tricks Ronny Andersson, Metria Vem är då jag? Ronny Andersson Jobbar som teknisk lantmätare på Metrias geodesienhet i Gävle. Mätansvarig i många olika typer av uppdrag och
EXAMENSARBETE. En jämförelse mellan traditionell RTK och nätverks-rtk på uppdrag av Skellefteå kommuns lantmäteriavdelning. Jon Söderqvist 2013
 EXAMENSARBETE En jämförelse mellan traditionell RTK och nätverks-rtk på uppdrag av Skellefteå kommuns lantmäteriavdelning Jon Söderqvist 2013 Civilingenjörsexamen Väg- och vattenbyggnadsteknik Luleå tekniska
EXAMENSARBETE En jämförelse mellan traditionell RTK och nätverks-rtk på uppdrag av Skellefteå kommuns lantmäteriavdelning Jon Söderqvist 2013 Civilingenjörsexamen Väg- och vattenbyggnadsteknik Luleå tekniska
Självkörande bilar. Alvin Karlsson TE14A 9/3-2015
 Självkörande bilar Alvin Karlsson TE14A 9/3-2015 Abstract This report is about driverless cars and if they would make the traffic safer in the future. Google is currently working on their driverless car
Självkörande bilar Alvin Karlsson TE14A 9/3-2015 Abstract This report is about driverless cars and if they would make the traffic safer in the future. Google is currently working on their driverless car
Geodetisk infrastruktur för projekt i Göteborgsområdet
 Geodetisk infrastruktur för projekt i Göteborgsområdet Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Dan Norin Lantmäteriet, dan.norin@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
Geodetisk infrastruktur för projekt i Göteborgsområdet Geodesidagarna 2019 Göteborg, 5 7 februari 2019 Dan Norin Lantmäteriet, dan.norin@lm.se Lantmäteriet Geodetisk infrastruktur Del av Geodatadivisionen
Felsökning av kommunikation mellan DLS och GPS mottagare.
 Felsökning av kommunikation mellan DLS och GPS mottagare. 1. Anslut GPS mottagaren till datorn med en kommunikationskabel. Starta sedan både GPS och datorn. En förutsättning för att kunna presentera positionen
Felsökning av kommunikation mellan DLS och GPS mottagare. 1. Anslut GPS mottagaren till datorn med en kommunikationskabel. Starta sedan både GPS och datorn. En förutsättning för att kunna presentera positionen
Realtidsmätning inom fastighetsbildning med Precise Point Positioning (PPP) Victor Kvarnström & Jessica Wallerström 2016-06-04
 Victor Kvarnström & Jessica Wallerström 2016-06-04") Realtidsmätning inom fastighetsbildning med Precise Point Positioning (PPP) Victor Kvarnström & Jessica Wallerström 2016-06-04 Examensarbete, 15 hp Lantmäteriteknik Lantmäteriingenjörsprogrammet, Högskolan
Realtidsmätning inom fastighetsbildning med Precise Point Positioning (PPP) Victor Kvarnström & Jessica Wallerström 2016-06-04 Examensarbete, 15 hp Lantmäteriteknik Lantmäteriingenjörsprogrammet, Högskolan
Att mäta med kvalitet. Nya avtal för digital registerkarta Lycksele, Kent Ohlsson
 Att mäta med kvalitet Nya avtal för digital registerkarta Lycksele, 2018-04-18 Kent Ohlsson I det här passet går vi igenom följande: Begreppen kvalitet och god mätsed HMK Handbok i mät- och kartfrågor
Att mäta med kvalitet Nya avtal för digital registerkarta Lycksele, 2018-04-18 Kent Ohlsson I det här passet går vi igenom följande: Begreppen kvalitet och god mätsed HMK Handbok i mät- och kartfrågor
Test av kinematisk Precise Point Positioning i realtid
 AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Test av kinematisk Precise Point Positioning i realtid Fredrik Jonsson & Rickard Jäderberg 2015 Examensarbete,
AKADEMIN FÖR TEKNIK OCH MILJÖ Avdelningen för industriell utveckling, IT och samhällsbyggnad Test av kinematisk Precise Point Positioning i realtid Fredrik Jonsson & Rickard Jäderberg 2015 Examensarbete,
GPS GPS. Classical navigation. A. Einstein. Global Positioning System Started in 1978 Operational in ETI Föreläsning 1
 GPS GPS Global Positioning System Started in 1978 Operational in 1993 2011-02-22 ETI 125 - Föreläsning 1 2011-02-22 ETI 125 - Föreläsning 2 A. Einstein Classical navigation 2011-02-22 ETI 125 - Föreläsning
GPS GPS Global Positioning System Started in 1978 Operational in 1993 2011-02-22 ETI 125 - Föreläsning 1 2011-02-22 ETI 125 - Föreläsning 2 A. Einstein Classical navigation 2011-02-22 ETI 125 - Föreläsning
Differentiell GPS för rörelsemätning av betongdammar
 Differentiell GPS för rörelsemätning av betongdammar Kraftindustrins Betongdag 2015 2015-04-23 1 Resultat från doktorandprojekt 2006 Tillståndskontroll av betongdammar genom instrumentering för automatisk
Differentiell GPS för rörelsemätning av betongdammar Kraftindustrins Betongdag 2015 2015-04-23 1 Resultat från doktorandprojekt 2006 Tillståndskontroll av betongdammar genom instrumentering för automatisk
Realtidsuppdaterad fristation
 Realtidsuppdaterad fristation Tillförlitlighetsanalys Juni 2011 Milan Horemuz Kungliga Tekniska högskolan, Institution för Samhällsplanering och miljö Avdelningen för Geodesi Teknikringen 72, SE 100 44
Realtidsuppdaterad fristation Tillförlitlighetsanalys Juni 2011 Milan Horemuz Kungliga Tekniska högskolan, Institution för Samhällsplanering och miljö Avdelningen för Geodesi Teknikringen 72, SE 100 44
Ökat personligt engagemang En studie om coachande förhållningssätt
 Lärarutbildningen Fakulteten för lärande och samhälle Individ och samhälle Uppsats 7,5 högskolepoäng Ökat personligt engagemang En studie om coachande förhållningssätt Increased personal involvement A
Lärarutbildningen Fakulteten för lärande och samhälle Individ och samhälle Uppsats 7,5 högskolepoäng Ökat personligt engagemang En studie om coachande förhållningssätt Increased personal involvement A
MätKart 12 Luleå. Positionering och GPS utrustningar ProLocate KartSmart. Aris Kolovos
 MätKart 12 Luleå Positionering och GPS utrustningar ProLocate KartSmart Aris Kolovos Redan de gamla greker tog hjälp av solen på dagen och stjärnorna på natten för att navigera. Navigation Idag tar vi
MätKart 12 Luleå Positionering och GPS utrustningar ProLocate KartSmart Aris Kolovos Redan de gamla greker tog hjälp av solen på dagen och stjärnorna på natten för att navigera. Navigation Idag tar vi
Byte av höjdsystem i en kommun
 L A N T M Ä T E R I E T Lantmäteriet Informationsförsörjning BYTE AV REFERENSSYSTEM 1 (7) Geodesienheten RH 2000 Per-Anders Olsson Linda Alm 2012-04-02 2014-05-14 Byte av höjdsystem i en kommun Inledning
L A N T M Ä T E R I E T Lantmäteriet Informationsförsörjning BYTE AV REFERENSSYSTEM 1 (7) Geodesienheten RH 2000 Per-Anders Olsson Linda Alm 2012-04-02 2014-05-14 Byte av höjdsystem i en kommun Inledning
Nätverks-RTK i produktionstest under ett år för positionsbestämning med centimeternoggrannhet i östra Svealand/Götaland
 Förslag Projektförslag för POSITION STOCKHOLM MÄLAREN - 2 2001-07-17 Nätverks-RTK i produktionstest under ett år för positionsbestämning med centimeternoggrannhet i östra Svealand/Götaland Sammanfattning
Förslag Projektförslag för POSITION STOCKHOLM MÄLAREN - 2 2001-07-17 Nätverks-RTK i produktionstest under ett år för positionsbestämning med centimeternoggrannhet i östra Svealand/Götaland Sammanfattning
Collaborative Product Development:
 Collaborative Product Development: a Purchasing Strategy for Small Industrialized House-building Companies Opponent: Erik Sandberg, LiU Institutionen för ekonomisk och industriell utveckling Vad är egentligen
Collaborative Product Development: a Purchasing Strategy for Small Industrialized House-building Companies Opponent: Erik Sandberg, LiU Institutionen för ekonomisk och industriell utveckling Vad är egentligen
Geoteknisk utredning Råda 1:9
 MARKTEKNISK UNDERSÖKNINGSRAPPORT (MUR) GEOTEKNIK BERGTEKNIK Härryda kommun Geoteknisk utredning Råda 1:9 Göteborg 2016-04-21, rev 2016-05-19 \\ramse\pub\got1\sgt\2016\1320020399\3_teknik\g\dokument\beskrivningar\extrengranskning
MARKTEKNISK UNDERSÖKNINGSRAPPORT (MUR) GEOTEKNIK BERGTEKNIK Härryda kommun Geoteknisk utredning Råda 1:9 Göteborg 2016-04-21, rev 2016-05-19 \\ramse\pub\got1\sgt\2016\1320020399\3_teknik\g\dokument\beskrivningar\extrengranskning
Stiftelsen Allmänna Barnhuset KARLSTADS UNIVERSITET
 Stiftelsen Allmänna Barnhuset KARLSTADS UNIVERSITET National Swedish parental studies using the same methodology have been performed in 1980, 2000, 2006 and 2011 (current study). In 1980 and 2000 the studies
Stiftelsen Allmänna Barnhuset KARLSTADS UNIVERSITET National Swedish parental studies using the same methodology have been performed in 1980, 2000, 2006 and 2011 (current study). In 1980 and 2000 the studies
Effekterna av en solär EMP ur ett civilt perspektiv
 Effekterna av en solär EMP ur ett civilt perspektiv 2018-01-30 Kristoffer Hultgren Behöver vi bry oss om rymden? Källa: Met Office 8:00 Satellit-TV försvann Utrikeskorrespondensen försvann Realtidsinfo
Effekterna av en solär EMP ur ett civilt perspektiv 2018-01-30 Kristoffer Hultgren Behöver vi bry oss om rymden? Källa: Met Office 8:00 Satellit-TV försvann Utrikeskorrespondensen försvann Realtidsinfo
Obemannade flygplan. Namn: Hampus Hägg. Datum: 2015-03-02. Klass: TE14B. Gruppmedlemmar: Gustav, Emilia, Henric och Didrik
 Namn: Hampus Hägg Obemannade flygplan Datum: 2015-03-02 Klass: TE14B Gruppmedlemmar: Gustav, Emilia, Henric och Didrik Handledare: David, Björn och Jimmy Abstract In this task I ve been focusing on unmanned
Namn: Hampus Hägg Obemannade flygplan Datum: 2015-03-02 Klass: TE14B Gruppmedlemmar: Gustav, Emilia, Henric och Didrik Handledare: David, Björn och Jimmy Abstract In this task I ve been focusing on unmanned
Jämförelse av enkelstations-rtk och nätverks-rtk i Lantmäteriets testnät
 LMV-Rapport 23:2 Jämförelse av enkelstations-rtk och nätverks-rtk i Lantmäteriets testnät Albert Jonsson & Anders Nordling Gävle 23 Copyright 24-5-24 Författare Albert Jonsson & Anders Nordling Typografi
LMV-Rapport 23:2 Jämförelse av enkelstations-rtk och nätverks-rtk i Lantmäteriets testnät Albert Jonsson & Anders Nordling Gävle 23 Copyright 24-5-24 Författare Albert Jonsson & Anders Nordling Typografi
Utvärdering av personlarm med GPS
 Utvärdering av personlarm med GPS Förutsättningar: EmCom har fått i uppdrag att utvärdera och analysera batteriprestandan hos två personlarm av olika fabrikat genom att ansluta dessa till vårt system och
Utvärdering av personlarm med GPS Förutsättningar: EmCom har fått i uppdrag att utvärdera och analysera batteriprestandan hos två personlarm av olika fabrikat genom att ansluta dessa till vårt system och
EXAMENSARBETE. Terrängmodellering. Martin Ström. Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Martin Ström Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Martin Ström Förord Som en del i utbildningen Bygg och Anläggning
EXAMENSARBETE Martin Ström Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Martin Ström Förord Som en del i utbildningen Bygg och Anläggning
DEN VERKLIGA VERKLIGHETEN - Lantmäteriet och rymden - Rymdforum 2015 Jörgen Hartnor
 DEN VERKLIGA VERKLIGHETEN - Lantmäteriet och rymden - Rymdforum 2015 Jörgen Hartnor Innehåll Satellitbildsdatabasen Saccess & GSD-Marktäckedata (Corine Land Cover) Geodetiska referenssystem och positioneringstjänster
DEN VERKLIGA VERKLIGHETEN - Lantmäteriet och rymden - Rymdforum 2015 Jörgen Hartnor Innehåll Satellitbildsdatabasen Saccess & GSD-Marktäckedata (Corine Land Cover) Geodetiska referenssystem och positioneringstjänster
1. Situationer när korrigering är nödvändig
 1. Situationer när korrigering är nödvändig Aktuell position ska korrigeras när: Du byter däck (utför automatisk korrigering). (Avståndskorrigering). Aktuell position bör korrigeras när: Fordonets positionsmärke
1. Situationer när korrigering är nödvändig Aktuell position ska korrigeras när: Du byter däck (utför automatisk korrigering). (Avståndskorrigering). Aktuell position bör korrigeras när: Fordonets positionsmärke
Konfigurering av nätverksanslutning i TSC2
 Konfigurering av nätverksanslutning i TSC2 För att kunna få tillgång till korrektioner från SWEPOS via GPRS behöver du en nätverksanslutning. Denna gör du genom att trycka på Windows symbolen uppe till
Konfigurering av nätverksanslutning i TSC2 För att kunna få tillgång till korrektioner från SWEPOS via GPRS behöver du en nätverksanslutning. Denna gör du genom att trycka på Windows symbolen uppe till
EXAMENSARBETE. Användning av maskinstyrning och avprickningsplan. Lisette Tillberg Högskoleexamen Bygg och anläggning
 EXAMENSARBETE Användning av maskinstyrning och avprickningsplan 2013 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Förord I utbildningen
EXAMENSARBETE Användning av maskinstyrning och avprickningsplan 2013 Högskoleexamen Bygg och anläggning Luleå tekniska universitet Institutionen för samhällsbyggnad och naturresurser Förord I utbildningen