FOI-R SE December 2002 ISSN Peter Alvå, Folke Andersson, Ove Steinvall. Slutrapport. Systemteknik Stockholm
|
|
|
- Alexander Engström
- för 8 år sedan
- Visningar:
Transkript
1 FOI-R SE December 2002 ISSN $QYlQGDUUDSSRUW Peter Alvå, Folke Andersson, Ove Steinvall /HGQLQJRFKVW\UQLQJDY VDPYHUNDQGHURERWDU Slutrapport Systemteknik Stockholm

2 TOTALFÖRSVARETS FORSKNINGSINSTITUT Systemteknik Stockholm FOI-R SE December 2002 ISSN $QYlQGDUUDSSRUW Peter Alvå, Folke Andersson, Ove Steinvall /HGQLQJRFKVW\UQLQJDY VDPYHUNDQGHURERWDU Slutrapport

3 8WJLYDUH 5DSSRUWQXPPHU,651.ODVVLILFHULQJ Totalförsvarets Forskningsinstitut - FOI FOI-R SE Användarrapport Systemteknik Stockholm ) UIDWWDUHUHGDNW U Peter Alvå Folke Andersson Ove Steinvall 5DSSRUWHQVWLWHO Ledning och styrning av samverkande robotar - Slutrapport )RUVNQLQJVRPUnGH 5. Bekämpning 0nQDGnU December HUNVDPKHWVJUHQ 3URMHNWQXPPHU E Uppdragsfinansierad verksamhet 'HORPUnGH 51 VVS med styrda vapen 3URMHNWOHGDUH Peter Alvå *RGNlQGDY Monica Dahlén 8SSGUDJVJLYDUHNXQGEHWHFNQLQJ FM 7HNQLVNWRFKHOOHUYHWHQVNDSOLJWDQVYDULJ Martin Hagström 6DPPDQIDWWQLQJK JVWRUG Ett system av flygande robotar där robotarna kan utbyta information med varandra öppnar för nya möjligheter, till exempel samverkan för att underlätta målidentifiering och målval. Robotsystemets förmåga ökar ytterligare om det dessutom kan kommunicera med ett yttre ledningsnätverk. Rapporten beskriver spelkort för ett attackrobotsystem med laser- och radiolänk för informationsutbyte och för ett UAV-system med möjlighet att samverka med robotsystemet. I ett scenario visas hur attackrobotar och UAV-systemets samordningseffekter kan utnyttjas för att uppnå taktiska fördelar. Forskningsaspekter kring autonoma styrsystem för samverkande robotar behandlas också. Ett samverkande robotsystem torde vara ett effektivt vapen mot rörliga mål på det framtida slagfältet, speciellt om spaningsuaver, attackrobotar samt ledningsnätverk kan utbyta relevant underrättelse- och mållägesinformation under såväl sök- som anfallsfas. FOI1003 Utgåva Sign On AB 1\FNHORUG Robotsystem, Scenarier, Autonomitet, Samordnad styrnng, Ledning, Nätverk, Simulering gyuljdeleolrjudilvndxssjliwhu 6SUnN Svenska, $QWDOVLGRU 76 s 'LVWULEXWLRQHQOLJWPLVVLY 3ULV(QOLJWSULVOLVWD 6HNUHWHVV 2

4 ,VVXLQJRUJDQL]DWLRQ 5HSRUWQXPEHU,651 5HSRUWW\SH FOI Swedish Defence Research Agency FOI-R SE User report Systems Technology SE Stockholm $XWKRUVHGLWRUV Peter Alvå Folke Andersson Ove Steinvall 5HSRUWWLWOH,QWUDQVODWLRQ Collaborating missiles systems - Final report 5HVHDUFKDUHDFRGH 5. Combat 0RQWK\HDU December 2002 &XVWRPHUVFRGH 5. Contracted Research 6XEDUHDFRGH 51 Weapons and Protection 3URMHFWPDQDJHU Peter Alvå $SSURYHGE\ Monica Dahlén 6SRQVRULQJDJHQF\ Swedish armed forces 3URMHFWQR E6003 6FLHQWLILFDOO\DQGWHFKQLFDOO\UHVSRQVLEOH Martin Hagström $EVWUDFWQRWPRUHWKDQZRUGV The report gives an example of a collaborating missile system and a UAV-system and shows how these can be used to obtain better system performance in tactical situations. The report contains a brief abstract of the current research in the guidance field. A collaborating missiles system shows good potential against moving targets, particularly if the missiles can interact with the C3I system during the attack..h\zrugv Missiles systems, Scenarios, Autonomy, Co-operative control, Command & control, Network, Simulation )XUWKHUELEOLRJUDSKLFLQIRUPDWLRQ /DQJXDJH Swedish, DJHV 76 p. 3ULFHDFFWRSULFHOLVW 6HFXULW\FODVVLILFDWLRQ 3

5 4

6 5,QQHKnOOVI UWHFNQLQJ,1/('1,1* 1.1 UPPDRAGET ARBETSUPPLÄGG DELTAGARE RAPPORTDISPOSITION...9 6$09(5.$1'(52%276<67(0±'$*(167(.1,.2&+)5$07,'(16%( KOMMUNICERANDE ROBOTSYSTEM IDAG OPERATIVA KRAV PÅ FRAMTIDA ATTACKROBOTAR BEHOV AV OCH KRAV PÅ TERRÄNGDATABAS <67(063(/ BÄRROBOTSYSTEMET TAURUS TRANSPORTER SUBROBOTSYSTEMET EURAAS ÖVRIGA LASTALTERNATIV TILL TAURUS TRANSPORTER $6±0RGXODULVHUDW2EHYDNDW1lWELOGDQGH0DUNVHQVRUVV\VWHP 6.$9$7±6XSHUNDYLWHUDQGHNRUWKnOOVWRUSHG $)250,1±$YVWnQGVYHUNDQGHIRUGRQVPLQV\VWHP 6L[SDFNEDFN 3.4 SPANINGSUAV-SYSTEMET CASTOR...18 /$6(5%$6(5$'5( ,.$7, ALLMÄN BESKRIVNING PRESTANDA TEKNISKA DATA UTVECKLINGSLÄGET...25 '/$6(55$'$5 5.1 MOTIV FÖR 3 D LASERRADAR TEKNIKLÄGET &(1$5,2±52%27$77$&.0270(.$1,6(5$'),(1'( 6.1 KRIGSUTBROTTET UNDERRÄTTELSEINHÄMTNING ROBOTINSATS KOMMENTARER TILL SCENARIOT...48 /('1,1*66<67(0)g56$09(5.$1'(52%27$5 $/*25,70(5)g56$09(5.$1$//0b17 67<51,1*)g50$;,0$/,1)250$7, DECENTRALISERAD STYRNING AV SAMVERKANDE ROBOTAR MED HJÄLP AV REINFORCEMENT LEARNING CENTRALISERAD STYRNING DECENTRALISERAD STYRNING DISTRIBUERAD OPTIMERING GENOM PARAMETERSÖKNING I POLICYRUMMET FORTSATT ARBETE HJXODWRUPHGIOHUDDEVWUDNWLRQVQLYnHU.RPPXQLNDWLRQPHOODQDJHQWHU 9.6 RELEVANT ARBETE <51,1*$952%27*5833(50('327(17,$/)b/7
250,1±$YVWnQGVYHUNDQGHIRUGRQVPLQV\VWHP 6L[SDFNEDFN 3.4 SPANINGSUAV-SYSTEMET CASTOR...18 /$6(5%$6(5$'5(752.20081,.$7,21 4.1 ALLMÄN BESKRIVNING...21 4.2 PRESTANDA.")
7 6 6,08/(5,1*602'(//,5$09(5.(7)/$0( FLAMES UTFÖRT ARBETE RELATERAT TILL FLAMES FORTSATT ARBETE ,',*$5($5%(7( 12.1 SYSTEMSTUDIER AV FIBEROPTISKT STYRDA ROBOTAR BANOPTIMERING FÖR MULTIPLA ROBOTAR SENSORDATAFUSION PLANERING AV ROBOTBANOR FÖR SYNKRONISERING I MÅLOMRÅDET SIMULERINGSMILJÖ FÖR SAMVERKANDE ROBOTAR - ROSA /876$76(5 )2576$77$5%(7( 5()(5(16(5

8 7,QOHGQLQJ Ett system av flygande robotar, där robotarna kan utbyta information med varandra, öppnar för nya möjligheter. Till exempel kan robotarna samverka för att underlätta målidentifiering och målval. Tekniken har i tidigare projekt studerats för ett system av fiberoptiskt styrda robotar [1, 2, 3], där styrningen sker från en gemensam dator i eldenheten med möjlighet till fullständigt informationsutbyte mellan de ingående robotarna under ledning och övervakning av en operatör. I detta projekt har vi studerat ett robotsystem som utnyttjar en radio- eller laserlänk för dataöverföring mellan robotarna, där endast ett begränsat informationsutbyte kan ske. 8SSGUDJHW Projektet 6W\UQLQJ DY VDPYHUNDQGH URERWDU skall enligt uppdraget från Försvarsmakten behandla följande frågeställning: Hur kan verkan mot olika typer av mål förbättras genom att utnyttja samverkande robotar? Hur kan information från underrättelse- och ledningssystem användas för vapenstyrning? Projektets mål har varit att utveckla teknik och metoder för samordnad (autonom) styrning av flera samverkande robotar. Projektet har vidareutvecklat ett koncept för samverkande robotsystem där en trådlös kommunikationslänk mellan robotarna utnyttjas. Projektet har också gett en ökad kompetens framför allt inom området autonom styrning, som också kommer till nytta i flera andra tillämpningar. $UEHWVXSSOlJJ Arbetet i projektet har bedrivits på fyra fronter: Systemstudier drivs för att belysa taktiska möjligheter med samverkande robotsystem. Grundläggande forskning på optimala styrprinciper för samordnad styrning utförs för att lösa några utvalda problem, samt för att bygga upp en kunskapsbas inom området autonoma system. Simuleringsstöd för tekniska och taktiska simuleringar utvecklas. Försöksplattform för autonom styrning utvecklas. Verksamheterna kompletterar varandra. Systemstudierna belyser vilka forskningsområden som är kritiska för en realisering av samverkande robotsystem. Forskningen på optimala styrprinciper, å andra sidan, ger ett underlag för att beskriva de tekniska aspekterna av systemstudien. Simuleringsstöd utnyttjas både vid utvecklingen av nya styrprinciper och vid
![Tekniken har i tidigare projekt studerats för ett system av fiberoptiskt styrda robotar [1, 2, 3], där styrningen sker från en gemensam dator i eldenheten med möjlighet till fullständigt](/docs-images/44/1816553/images/page_8.jpg "informationsutbyte mellan de ingående robotarna under ledning och övervakning av en operatör.")
9 8 systemstudier. Försöksplattformen ger en möjlighet att testa robustheten hos styrprinciper när verkligheten behagar hålla examen. Den ger också värdefull kunskap om svårigheten med och kostnaden för att implementera ny teknik. %HVOXWVXQGHUODJ 6SHONRUW.XQVNDSVEDV 1\DVW\USULQFLSHU 6SHONRUW8*9V\VWHP 'HPRQVWUDWLRQHU Resultat Resultat Resultat 6\VWHPVWXGLHU Förmågebehov Tekniska möjligheter )RUVNQLQJSn VW\USULQFLSHU Styralgoritmer Realiserbarhet ) UV NV SODWWIRUP FLAMES ROSA 6LPXOHULQJV PRGXOHU Resultat 6LPXOHULQJVVW G )LJXU3URMHNWHWVYHUNVDPKHWHU Resultatet av systemstudierna riktar sig direkt mot kundens (Försvarsmaktens) behov genom att ge beslutsunderlag för fortsatt forskning om samverkande robotsystem, samt för planering av framtida vapensystem och analys av framtida hotbild. De spelkort som produceras kan utnyttjas i andra verksamheter, t.ex. i FoRMA-studien som exempel på PE-system. Resultatet av forskningsverksamheten kommer också Försvarsmakten till godo genom att den kunskapsuppbyggnad om autonoma system som sker kan utnyttjas för kommande studier. Framtagna autonoma styrprinciper kan i ett längre perspektiv komma till nytta i framtida svenska vapensystem, men utgör också en viktig grund för internationella kontakter inom området autonomitet. Arbetet med simuleringsverktyg ger också resultat i form av robotsimuleringsmoduler som kan, liksom spelkorten, utnyttjas av andra studier. Försöksplattformen, som utvecklas i samarbete med flera projekt på Institutionen för Flyg och Autonoma system, kan också bli ett värdefullt verktyg för forskningen på andra institutioner och avdelningar inom FOI.
LJXU3URMHNWHWVYHUNVDPKHWHU Resultatet av systemstudierna riktar sig direkt mot kundens (Försvarsmaktens) behov genom att ge")
10 9 'HOWDJDUH I projektet har följande personer vid FOI deltagit: Peter Alvå, Flyg och Autonoma System (Projektledare) Antonios Fokas, Flyg och Autonoma System (Bitr. projektledare) Birgitta Stridh, Flyg och Autonoma System (Sekreterare) Folke Andersson, Flyg och Autonoma System Åke Arvidsson, Flyg och Autonoma System Lars Forssell, Flyg och Autonoma System Leif Hagstedt, Flyg och Autonoma System Johan Hamberg, Flyg och Autonoma System Anders Lennartsson, Flyg och Autonoma System Erik Marits, Flyg och Autonoma System Daniel Skoogh, Flyg och Autonoma System Dag Wallström, Flyg och Autonoma System Andreas Alm, Flyg och Autonoma System (Examensarbetare) Daniel Martin, Flyg och Autonoma System (Examensarbetare) Martin Eklöf, Systemmodellering Johan Pelo, Systemmodellering Jenny Ulriksson, Systemmodellering Martin Jerberyd, Systemmodellering (Examensarbetare) Johan Schubert, Data- och Informationsfusion Åke Wernersson, Data- och Informationsfusion Ove Steinvall, Lasersystem Staffan Gadd, Radarsensorer Från Försvarsmakten, projekt ArtDemo, har följande personer medverkat: Joakim Nyman, Artreg Lennart Lindquist, MTK Bidrag till rapporten har lämnats av, förutom av författarna, Antonios Fokas, Johan Hamberg och Dag Wallström. 5DSSRUWGLVSRVLWLRQ Huvuddelen av rapporten redovisar resultatet av den systemstudie som genomförts under hösten 2002, en studie som har varit en vidareutveckling av tidigare studier i projektet 2000 och 2001 [4, 5]. För att rapporten skall kunna läsas fristående har en hel del resultat från dessa studier också tagits med. Rapporten är också en slutrapport från projektet Styrning av Samverkande robotar och redovisar därför en sammanfattning av de frågor som har behandlats och de resultat som har uppnåtts. Rapporten inleds i kapitel 2 med en diskussion om dagens teknikläge och framtidens operativa krav på robotsystem. Därefter presenteras i kapitel 3 de spelkort som använts i studien, för
 Daniel Martin, Flyg och Autonoma System (Examensarbetare) Martin Eklöf, Systemmodellering Johan Pelo,")
11 10 robotsystem och viktiga delkomponenter såväl som för andra system med vilka robotarna kan samverka. Spelkorten utnyttjas sedan i kapitel 4 i ett scenario för att demonstrera vilka nya förmågor som kan erhållas med samverkande robotsystem. Laserbaserad retrokommunikation samt 3D laserradar är två viktiga systemkomponenter som utnyttjats i spelkorten och i scenariot. En teknisk beskrivning av dessa ges i kapitel 4 och 5. Samverkande robotar är också en viktig systemkomponent i ett framtida Nätverksbaserat försvar. I kapitel 7 diskuteras robotarnas koppling till Nätverket och deras möjligheter att såväl utnyttja detta som att bidra till detsamma. Projektets huvudinriktning är forskning på algoritmer för samordnad styrning. Detta arbete presenteras i kapitel 8-10, först en diskussion om olika aspekter kring styralgoritmer för samverkande robotsystem och därefter en sammanfattning av aktuell verksamhet i projektet. En simuleringsmiljö har utvecklats i projektet för att utnyttjas dels för arbetet med styralgoritmer och dels för att med taktiska simuleringar stödja systemstudier och systemvärderingar. Denna simuleringsmiljö presenteras i kapitel 11. Kapitel 12 innehåller en sammanfattning av några resultat från ett tidigare projekt, Fiberoptiskt styrda robotar. Många av dessa resultat har kunnat utnyttjas i projektet Styrning av samverkande robotar. Vi avslutar rapporten med några sammanfattande slutsatser (kapitel 13), samt en presentation av ett kommande projekt, Samverkande robotar i nätverk, där detta projekts resultat kommer att tillvaratas och vidareutvecklas (kapitel 14).

12 11 6DPYHUNDQGHURERWV\VWHP±GDJHQVWHNQLNRFKIUDP WLGHQVEHKRY.RPPXQLFHUDQGHURERWV\VWHPLGDJ Det finns idag inga robotsystem som samverkar annat än på en mycket låg nivå, t.ex. kommunikation mellan robot och skytt. Några exempel på sådana system är: Rbs23 Bamse där roboten leds in mot målet av en eldledningsradar monterad på lavetten, det vill säga ett enkelriktat och kontinuerligt informationsflöde. Den ryska jaktroboten AA-10 ALAMO, där roboten skjuts mot en punkt och där dess målsökare har möjlighet att låsa på målet. Kommunikation sker endast för att uppdatera roboten om eventuella förändringar i måluppträdandet, det vill säga ett enkelriktat och behovsstyrt informationsflöde. Då AA-10:s målsökare är semiaktiv är roboten även efter mållåsning beroende av radarbelysning från det skjutande flygplanet. Den amerikanska luftvärnsroboten PATRIOT som styrs från en markstation, men även utrustats med en målsökare. Målsökarens information sänds ner till markstationen, där den tillsammans med mål- och robotdata uppmätt av eldledningsradarn används för att beräkna styrkommandon, som sedan sänds till roboten, det vill säga ett kontinuerligt dubbelriktat informationsflöde. Den huvudsakligen i Tyskland utvecklade roboten POLYPHEM som styrs via optofiber. Styrkommandon beräknas av skytten utifrån information från robotens målsökare, även här ett kontinuerligt dubbelriktat informationsflöde. POLYPHEM-systemet är också intressant med hänsyn till att dess robotar har en gemensam länk till/från avfyrningsenheten/operatören och att systemet relativt lätt torde kunna modifieras för att uppträda utifrån principer för delad information. LOCAAS är ett amerikanskt turbojetmotordrivet subrobotsystem som i huvudsak är avsett för att inom en given yta självständigt söka efter, identifiera och bekämpa vissa typer av flyttbara eller rörliga mål. LOCAAS-roboten är ursprungligen inte framtagen att utnyttjas för en inbördes samverkan mellan flera individer, men studier för samverkande robotsystem pågår inom ramen för en vidareutveckling av LOCAAS-systemet, där robotar utrustade med laserlänk är tänkta att utgöra agenter. 2SHUDWLYDNUDYSnIUDPWLGDDWWDFNURERWDU Framtidens markstrid bedöms ställa nya, hårda krav på attackrobotsystem. Exempel på sådana är (ej i prioritetsordning!) förmåga att bekämpa tidskritiska mål (luftvärn, artilleri, stridsfordon etc.), förmåga till kostnadseffektiv bekämpning med god yttäckningsförmåga,

13 12 förmåga att genom autonomt låghöjdsuppträdande reducera risken för upptäckt och bekämpning, förmåga till måldiskriminering, träffpunktsoptimering och bekämpningsoptimering, förmåga till graderad verkan och begränsning av oönskade sidoeffekter, förmåga till bekämpning av flera mål per insats, förmåga till hög funktionssannolikhet oberoende av väder och belysningsförhållanden, förmåga till optimal och effektiv insats (varje robot träffar ett mål), förmåga att samla in och kommunicera omvärldsinformation för uppdatering av exempelvis syntetiska omgivningar, förmåga att kommunicera relevant underlag för verkansutvärdering, förmåga att hantera situationer med avsiktlig störning och/eller vilseledning. Ovanstående krav bedöms kunna lösas av ett system bestående av en flygburen bärrobot som avsöndrar ett antal subrobotar, vilka därefter autonomt avsöker ett större område och kommunicerar med såväl bärrobot som varandra för att uppnå optimal verkan och verkansverifiering. Låghöjdsuppträdande ( meter) medger oftast en tillfredsställande meteorologisk sikt för målupptäckt med medförda sensorsystem och möjliggör samtidigt ett uppträdande som reducerar bekämpningsrisken. En avancerad sensor i subrobotarna som utnyttjar aktiv/passiv detektion såväl inom det optiska- som inom RF-området skapar förutsättningar att åstadkomma ett kompakt system för automatisk måligenkänning. Hög upplösning i tre dimensioner ger möjligheter till träffpunktsoptimering och att åstadkomma tillräcklig verkan med begränsad sprängkraft. Samverkan mellan subrobotar med attackfunktion ökar förmågan till upptäckt, lokalisering, identifiering och bekämpning av prioriterade mål, samt möjliggör en mellan subrobotarna inbördes optimal målfördelning. %HKRYDYRFKNUDYSnWHUUlQJGDWDEDV Den geografiska informationen spelar en viktig roll för all militär verksamhet. Utveckling och användning av geografiska informationssystem (GIS) är mycket snabb och den höga utvecklingstakten på datorsidan underlättar införandet av mycket kraftfulla system. Vid tillämpning på ett system av autonomt uppträdande och samverkande flygande robotar med spanings- /attackfunktion kan digitala geografiska data utnyttjas för att, med utgångspunkt från systemspecifika krav hos såväl de egna systemen som motståndarens, analysera hur en kombination av olika kriterier påverkar möjligheterna till ett eget optimalt uppträdande i ett stridsområde. Exempel på kriterier kan vara optiska siktförhållanden, maskvinklar som förhindrar insyn/utblick, elektromagnetisk vågutbredning, öppen eller skylande terräng, transportvägar, framkomlighet. Under förutsättning att det autonomt verkande robotsystemet ges tillgång till ett högupplöst och systemanpassat GIS-underlag bedöms detta i hög grad öka systemets förutsättningar att, i

14 en dynamisk stridsmiljö och i nära realtid, såväl analysera som bedöma det egna systemets handlingsmöjligheter utgående från motståndarens handlingsmöjligheter och hans sannolika handlande under inverkan av terrängfaktorer. 13

15 14 6\VWHPVSHONRUW Nedan beskrivs ett antal systemspelkort som tillsammans utgör exempel på hur ett konceptuellt system för samverkande robotar kan vara uppbyggt. Spelkorten bör såväl enskilt som tillsammans betraktas som exempel på ett fiktivt totalsystem där de ingående enheterna representerar olika delfunktioner. Systemspelkorten beskriver bland annat en bärrobot (TAURUS Transporter) vilken kan förses med ett antal olika lastalternativ. Det för studien mest intressanta lastalternativet utgörs av åtta stycken turbojetmotordrivna subrobotar (EURAAS). När dessa avsöndrats från bärroboten kan de kommunicera såväl inbördes som med i området förekommande bärrobotar, spaningsuaver (CASTOR) och andra kommunikationsnoder i Nätverket. Spelkorten beskriver inget i sinnevärlden idag förekommande totalsystem utan baseras på en tänkbar och möjlig vidareutveckling av olika delsystem vilka kan spåras tillbaka i den pågående tekniska evolutionsprocessen. I kapitel 4 ges exempel på några av de taktiska fördelar som kan erhållas med detta koncept vid ett samordnat anfall mot ett antal olika typer av rörliga markmål. Två viktiga delkomponenter i spelkorten är Laserbaserad retrokommunikation och 3 D laserradar. En utförligare teknisk presentation av dessa följer i kapitel 4 respektive kapitel 5. %luurerwv\vwhphw 7$85867UDQVSRUWHU Som bärrobot har här en utvecklad variant av TAURUS-systemet (KEPD 350) kommit till användning, benämnd "TAURUS Transporter", med bland annat nedanstående fyra lastalternativ. MOMAS (12 st.) EURAAS (8 st.) SKAVAT (2 st.) AFORMIN (4 st.) I studien har vi framför allt utnyttjat det andra lastalternativet, åtta stycken subrobotar av typ EURAAS. Systemkombinationen kan utnyttjas för insats mot såväl fordon som fartygsmål samt RF-emitterande måltyper, t.ex. spanings- eller eldledningsradar. TAURUS Transporter kan bäras, transporteras och avfyras från en flygande vapenbärare exempelvis JAS 39 Gripen, alternativt förses med startraketer som medger utskjutning från en fordonsmonterad marklavett (jfr NEMESIS-projektet). TAURUS Transporter räckvidd överensstämmer i princip med KEPD 350, men vid beräkning av total systemräckvidd bör hänsyn tas till subrobotarnas uppträdande efter det att dessa avsöndrats från bäraren. TAURUS Transporter målsökarsystem utgörs av en IR-målsökare integrerad med en laserradar, där de två funktionerna utnyttjar en gemensam apertur. För samband med omvärl-
.")
16 15 den utnyttjas huvudsakligen ett speciellt laserlänksystem och som reservalternativ en RF-länk när den optiska länkens prestanda begränsas av nedsatt sikt. $QP Laserlänksystemet medger frisiktskommunikation och ett ömsesidigt informationsutbyte med såväl extremt hög bandbredd som hög länksäkerhet och utgående från siktstatistik oftast med en god tillgänglighet. 'DWDRFKSUHVWDQGD(Endast för studien relevanta storheter redovisas här.) Marschfart, anflygningsfas: 850 km/h (240 m/s) Marschfart, UAV-mod : 540 km/h (150 m/s) Anflygningshöjd: c:a 30 m över underliggande terräng Minsta svängradie: 150 m (sustained turn) vid farten 150 m/s /DVHUUDGDU Lasertyp Diodpumpad YAG eller fiberbaserad laser Våglängd 1,06 alt.1,5 µm Lasereffekt (medeleffekt) 0-25 W Pulslängd 1-3 ns Pulsenergi µj Avsökning Parallellscan + möjlighet till pekning, zoommod. Scanner Galvanometerstyrd spegel+vätskekristall för finavsökning i zoommod över målkandidat Scannerfrekvens spegel 80 Hz Finavsökning i zoommod 10x10 m 2 med en uppdatering av 25 Hz. Lasermottagare 5 cm mottagaröppning Detektorarray, 10 element,5&&'vhqvru Täckning TV/CCD (färg) Täckning IR: Vinkelupplösning: Teknik IR Temperaturupplösning 3RVLWLRQHULQJ.RPPXQLNDWLRQ Huvudalternativ Reservalternativ 1 x0,75-14 x10 2 x1,5-20 x15 0,1 mrad Okyld bolometertyp, kameravikt 1-2 kg < 100 mk GPS, alt. Terrnav utnyttjande lasermätt topografi Laserlänk (balanserat system eftersom målsensorerna är optiska) RF länk (p.g.a. röjnings och störrisk)
 Marschfart, anflygningsfas: 850 km/h (240 m/s) Marschfart, UAV-mod : 540 km/h (150 m/s) Anflygningshöjd: c:a 30 m över underliggande terräng Minsta svängradie: 150 m (sustained turn) vid farten 150")
17 16 /DVHUNRPPXQLNDWLRQVOlQN Lasereffekt Lasertyp Laserlob Lasermottagare Optik Detektor 1-10 W Laserdiodarray 160 x30 Hemosfärisk, 3 cm i diameter Fotodiod Anm. Eftersom det troligen är viktigt med full duplex mellan robotarna har de var sin sändare och mottagare. Robotarna kan förses med retromodulator som tillåter att de om de laserbelyses t.ex. från marken, kan modulera tillbaka en reflekterad stråle med den information som de har lagrat eller just för tillfället samlar in. 6XEURERWV\VWHPHW (85$$6 EURAAS (EURopean Autonomous Attack System) är ett turbojetmotordrivet subrobotsystem vilket försetts med ett målsökarsystem av laserradartyp som med hjälp av en avancerad målsökaralgoritm, i kombination med ett medfört målbibliotek, vid bekämpningstillfället väljer en måltypsrelaterad stridsdelsmod. För att roboten även skall kunna komma till användning mot emitterande RF-mål har målsökaren försetts med integrerad anordning vars mottagarantenner utgörs av alternativt: Farkostintegrerade konforma antenner. Tre kring målsökaraperturen. med 120 inbördes vinkelförskjutning, framåtriktade antennspröt för fasjämförande inmätning av inkommande RF-signaler, jfr RAM (Rolling Airframe Missile). Ett fraktalt antennsystem" med möjlighet till fasjämförande inmätning inom ett brett frekvensområde. Upp till åtta stycken EURAAS kan bäras av en TAURUS Transporter. )DUNRVWGDWD Längd: Spännvidd: Startvikt : Stridsdelsvikt: 0,8 m 1,0 m (utfällda vingar) 45 kg 7 kg )DUNRVWSUHVWDQGD Flyghastighet: Flyghöjd: Max flygtid: Minsta svängradie: 540 km/h (150 m/s) m 20 min (motsvarande 120km flygsträcka) 150 m (sustained turn) vid farten 150 m/s

18 17 /DVHU,5&&'V\VWHP Stråkbredd: Avsökning: Måldetektion: Måligenkänning: Signalbehandling ATR: Lagring av terrängdata Verkansutvärdering (BDA): Flyghöjdsberoende (ung. lika med flyghöjd) Framför farkosten (upp till 1000 m) eller rakt under IR/CCD alternativt laser eller kombination I huvudsak laser (3-D) med stöd av IR/CCD (ATR=Aut. Target recognition) Storleksmätning (till 0,1 meter noggr.), Orientering, särdragsextraktion, 3-D modellmatchning i medfört målbibliotek För senare användning i uppdaterade högupplösta (10 cm) terrängdatabaser över stridsfältet. Länkas via laser alt. RF-länk till fpl/hkp/uav i området eller till markstation. Sensordata länkas via UAVer till ledningssystemet..rppxqlndwlrq Laserlänk Samverkan: några 10-tal robotar Max samverkansavstånd 5-8 km, väder- och terrängberoende Kommunikationsinnehåll ID varje rb, position, detekterade måltyper, målposition, verkansverifiering, lagrade terrängdata i batchsändning. 6WULGVGHO Av multifunktionstyp med tre olika verkansformer, mot aktivt pansar respektive bepansrade mål och mjuka mål: stretching rod, slug, och splitter. gyuljdodvwdowhuqdwlywloo7dxuxv7udqvsruwhu 020$6±0RGXODULVHUDW2EHYDNDW1lWELOGDQGH0DUNVHQVRUVV\VWHP MOMAS är en marksensor av multifunktionstyp avsedd för luftlandsättning. Ett stort antal sensorer sprids ut ur bäraren och faller/styrs med hjälp av GPS till av bäraren utpekade platser. Därefter upprättas automatiskt kontakt med varje MOMAS inom räckvidd och därigenom utgör varje MOMAS en nod i ett marksensornät. Kommunikation mellan marksensorerna sker med frekvenshoppande högfrekvensradio i likhet med den kommersiella standarden Bluetooth. Varje MOMAS är utrustad med både en riktningskänslig akustisk sensor och en vibrationssensor. Vidare är varje MOMAS utrustad med en optisk retromodulator för laserlänkkommunikation med externa agenter såsom bäraren eller UAVer. Upp till tolv stycken MOMAS kan bäras av en TAURUS Transporter. 6.$9$7±6XSHUNDYLWHUDQGHNRUWKnOOVWRUSHG SKAVAT är en, i sökfasen elmotordriven och under anfallsfasen raketdriven, superkaviterande optofiberstyrd korthållstorped i 150 kg-klassen som efter fällning från TAURUS
, Orientering, särdragsextraktion, 3-D modellmatchning i medfört målbibliotek För senare användning i uppdaterade högupplösta (10 cm) terrängdatabaser över stridsfältet. Länkas via laser alt.")
19 18 Transporter (JAS 39 Gripen) fallskärmsbromsas före medieväxling samt på vattenytan kvarlämnar en antennboj avsedd för länkförbindelse med övriga substridsdelar och operatör. Denna antennboj är utrustad med samma kommunikationssystem som bäraren men kommunicerar med torpeden via en optisk fiber. Upp till två stycken SKAVAT kan bäras av en TAURUS Transporter. $)250,1±$YVWnQGVYHUNDQGHIRUGRQVPLQV\VWHP 6L[SDFNEDFN AFORMIN är ett avståndsverkande fordonsminsystem som förpackats i en sixpackback. Varje sixpackback är försedd med en GPS-styrd glidfallskärm. Beroende på vald fällhöjd kan minsystemets täckningsområde varieras. Sixpackbacken landar i närheten av ett område som skall bevakas och skjuter sedan in marksensorer till området. Marksensorerna är av samma typ som MOMAS men saknar radiolänk, dessa kommunicerar med sixpackbacken via fiber för att inte röja sig. När ett fordon kommer in i bevakningsområdet lobbar sixpackbacken in målsökande stridsdelar i riktning mot målet. Sixpackbacken är utrustad med samma kommunikationssystem som bäraren för att rapportera läge och status. Upp till fyra stycken AFORMIN kan bäras av en TAURUS Transporter. 6SDQLQJV8$9V\VWHPHW &$6725 CASTOR är en kolvmotordriven spaningsuav som baseras på en tänkbar vidareutveckling och anpassning av UAV-systemet SEASCAN A/B [6]. Valet av SEASCAN som utgångspunkt för en tänkbar vidareutveckling mot ett förbandssatt system i tidsperspektivet har skett mot bakgrund av dels systemets relativa litenhet, dels dess möjligheter att operera under mycket långa aktionstider. Till detta kan läggas två jämförelsevis okomplicerade startmetoder i kombination med en enkel och innovativ metod för återfångst av UAVn efter fullgjort uppdrag. Sammantaget innebär dessa faktorer att UAV-systemet relativt enkelt bedöms kunna transporteras och operera från dels plattformar av typ (hemvärnsmannens/-kvinnans) personbil med takräcksmonterad startlavett och återfångstanordning, dels (Marinens eller Kustbevakningens) fartyg eller båtar (t.ex. Stridsbåt 90). De sistnämnda måste dock utöver fångstanordningen förses med en inte alltför utrymmeskrävande pneumatisk katapult av teleskoptyp. CASTOR-systemet är i första hand avsett som ett enskilt uppträdande spaningsuav-system men kan vid behov även samverka med en eller flera identiska UAV-individer, i svärm eller flock för att lösa spaningsuppgifter över hav eller mot mål i underliggande terräng. Laserlänken medger även att CASTOR kan ingå som en icke stridsdelsbärande flockmedlem tillsammans med länkbärande EURAAS-robotar Ännu ett tänkbart exempel/scenario är att utnyttja ett antal CASTOR som en flygande kedja av relästationer för att därigenom skapa en möjlighet att med extrem bandbredd och länksäkerhet upprätta samband, samt utöva direkt verksamhetsledning, över långa avstånd. 2SWLRQ. Vid diskussion med företrädare för Hägglunds Vehicle pekade vi på möjligheten att ett framtida enhetsfordon av SEP-typ (Skyddad Enhets Plattform), som utrustats med såväl katapult som fångstanordning samt en kassett innehållande 9-12 stycken UAVer av CASTOR-typ, därmed skulle kunna utgöra ett exempel på en markrörlig basresurs för systemet.

20 19 2SWLRQ Mot bakgrund av att CASTOR-systemets begränsade fartresurser men, från flera utgångspunkter, fördelaktig långa aktionstid ställs vi inför problemet att över stora avstånd snabbt komma fram till och påbörja verksamhet i spaningsområdet. En möjlig lösning syns därför vara att CASTOR med hopfällda vingar förpackas i en speciell UAV-kapsel avsedd att hängas i en yttre vapenbalk på ett stridsflygplan. Därigenom skulle en eller flera CASTOR snabbt kunna flygtransporteras till och fällas över ett insatsområde. Efter fällning bromsas respektive kapsel med hjälp av en fallskärm till en lämplig fart där CASTOR frigörs, fäller ut vingarna, startar motorn och påbörjar tilldelat uppdrag. Efter fullgjort uppdrag återvänder CASTOR med distansekonomisk fart till utgångsbasen alternativt till någon annan av operatören vald landningsplats. )DUNRVWGDWD Spännvidd: 3,1 m Längd: 1,2 m Vingyta: 0,75 m 2 Framkantpilvinkel: 23 Kroppsdiameter: 0,2 m Max lastförmåga: 7,5 kg (inkluderar nyttolasten sensor- och sambandsystem plus bränsle). Anm. Viktförhållandet mellan nyttolast och bränsle påverkar väsentligen uttagbar aktionstid. Transportförpackning: (L x B x H) = 2,0 x 0,5 x 0,4 m (= Motsvarar ett kassettutrymme vid transport i ett specialfordon avsett för att operera med ett antal UA- Ver). Energiförsörjning: 70 W startgenerator plus en batterienhet som i samband med en avsiktligt tyst glidflykt kan strömförsörja de för uppgiftens lösande väsentliga systemen och därefter medge återstart av drivmotorn. )DUNRVWSUHVWDQGD Fartintervall: km/h ( m/s) Max flyghöjd: 5 km Stighastighet: 5 m/s Glidtal: 1:25 Minsta svängradie: 30 m (sustained turn) vid farten 40 m/s Aktionstid: > 15 h

21 20 6HQVRUV\VWHP $OW IR/CCD sensor Täckning TV/CCD (färg) Täckning IR: Vinkelupplösning: Teknik IR Temperaturupplösning 1 x0,75-14 x10 2 x1,5-20 x15 0,1 mrad Okyld bolometertyp, kameravikt 1-2 kg < 100 mk $OW QinetiQ s VLADIMIR (Very Large Array Demonstration Imager for InfraRed) [7] Den engelska forskningsorganisationen QinetiQ utvecklar för närvarande ett intressant gimbalupphängt IR-kamerasystem med dubbla bildfält, avsett att ingå som bildsensor i UAVsystemet OBSERVER. IR-kameran är försett med två parallellt riktade linssystem med olika brännvidd, samt två okylda detektorarrayer. Ett chopper-system växlar mellan arrayerna och de två bilderna sänds växelvis till en mottagare där de genom överlagring och bildbehandling presenteras på en bildskärm på sådant sätt att bildens centrala delar har en högre upplösning än dess periferi. 3RVLWLRQHULQJ GPS, alt. Terrnav utnyttjande lasermätt topografi.rppxqlndwlrq Huvudalternativ Reservalternativ /DVHUNRPPXQLNDWLRQVOlQN Lasereffekt Lasertyp Laserlob Lasermottagare Optik Detektor Laserlänk (balanserat system eftersom målsensorerna är optiska) RF länk (p.g.a. röjnings och störrisk) 1-10 W Laserdiodarray 160 x30 grader Hemosfärisk, 3 cm i diameter Fotodiod Anm. Eftersom det troligen är viktigt med full duplex mellan robotarna har de var sin sändare och mottagare. UAVerna kan förses med retromodulator som tillåter att de om de laserbelyses t.ex. från marken, kan modulera tillbaka en reflekterad stråle med den information som de har lagrat eller just för tillfället samlar in.
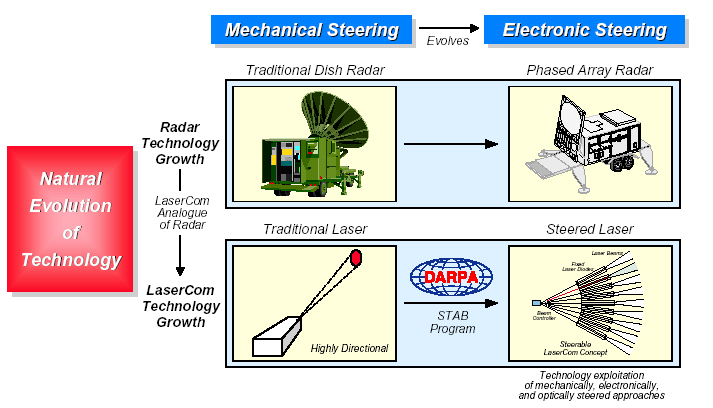
22 21 /DVHUEDVHUDGUHWURNRPPXQLNDWLRQ $OOPlQEHVNULYQLQJ Kommunikationssystem kommer att ha en central roll i det nätverksbaserade försvaret (NBF). En dimensionerande del kommer att vara möjligheten att tillhandahålla taktiska kommunikationslänkar med höga krav på kapacitet, tillgänglighet, robusthet samt smygegenskaper. Detta kommer att kräva kommunikationstekniker som ligger i teknologisk framkant och som kan kombineras i nätverk. Laserkommunikation är en systemkomponent som innehåller fördelar som t.ex.: Mycket höga datatakter Mycket hög störtålighet Mycket goda smygegenskaper. Laserbaserad retrokommunikation erbjuder en attraktiv utformning av laserkommunikationslänkar. Principen framgår av figur 1. En kontinuerlig laser belyser en retroreflektor (t.ex. hörnkub eller trafikreflex) där det reflekterade ljuset moduleras genom att någon yta i reflektorn ändrar sin transmission eller reflektion. Med hjälp av en elektrisk insignal styr man modulationen av det reflekterade ljuset. En tänkbar modulationsteknologi kan baseras på halvledarkomponenter (s.k. kvantbrunnsstrukturer) där den teoretiskt möjliga bandbredden kan vara upp emot 1 Gbit/s eller andra tekniker som vätskekristaller (bandbredd upp till 100 kbit/s). )LJXU3ULQFLSHQI UUHWURNRPPXQLNDWLRQ
23 22 Några fördelar med retrokommunikation relativt konventionella laserlänkar är: Endast en sändar/mottagarmodul med tillhörande tracker. Enklare länketablering. Retromodulatorn kan göras mycket kompakt och effektsnål (< 10 g, < 100 mw). Potential för tillverkning av ett mycket billigt system som lämpar sig väl för UAV, bojar m.m. samt även för den enskilde soldaten. Modulatorenheten kan även användas för bruten siktlinje (i reläfunktion) så att flera mottagare kan observera samma UAV eller samma punkt på en vägg t.ex. för att få information. Systemet kan kombineras med icke-mekanisk strålavsökning och stabilisering som ytterligare kan användas för att förbättra systemprestanda b.la. m.a.p. länkens tillgänglighet (adaptiv optik m.m.). Retrokommunikation kan med fördel integreras i andra laser- och EO system t.ex. optikspanare, DIRCM ( Directed Infrared Countermeasures ), siktessystem, attackpodar etc. Det man tar till vara är befintliga lasermottagare, följesystem, IR kameror etc. som tillåter snabb inriktning av den belysande lasern samt mottagning av den reflekterade modulerade strålen. I en enklare form kan retromodulatorn användas för IK. För att säkerställa att retroreflektorn är dold för obehöriga kan man tänka sig att den är försedd med något lock som tas bort efter mottagning av viss kod som sänds antingen med radio eller med laser. Man kan även ha tillämpningar där den är optiskt öppen med där den belysande laser ger autencitet samt kommando över vad som skall sändas, t.ex. lagrade data, realtidsdata etc. Man kan också tänka sig en enklare retromottagare där en modulator placeras i fokalplanet efter en lins. Med hjälp av retroreflexen kan information överföras. Här används en modulator med liten area (< 1mm 2 ), vilket tillåter mycket höga överföringshastigheter (Gbit/s). Tillämpningen är en stationär (t.ex. tillfälligt utplacerad) retromottagare. Nackdelen med en fokalplansreflektor är det smala synfältet, vilket kräver hög peknoggrannhet hos sändar/mottagarenheten. Ny teknik för icke-mekanisk strålstyrning (t.ex. med optiskt fasmodulerande arrayer) kan medge avsökning och strålstabilisering med hög precision, vilket reducerar lasereffekt behovet. 3UHVWDQGD Räckvidd För ett kvalificerat system med kapacitet motsvarande avsnitt 4.3 nedan (1 W laser, stråldivergens 1 mrad.) erhålls följande räckvidder:
24 23 Visuell sikt Räckvidd mot retrolänk (dag+sol, natt) 3 km 3.8 km, 4.5 km 5 km 5,5 km, 7 km 10 km 8 km, 10 km 20 km 11 km, 17 km 50 km 16 km, 21 km 7DEHOO5lFNYLGGI UNYDOLILFHUDGUHWUROlQN För andra system kan man skala räckvidder enligt nedanstående diagram. Faktorn F=1 har satts för ovanstående data och F<1 anger motsvarande faktorförsämring och F>1 förbättring. F är proportionell mot lasereffekt, lasermottagarens area, laserreflektorns storlek, samt omvänt proportionell mot utgående och reflekterad stråles divergens i kvadrat etc. 5lFNYLGGNP615 G% lFNYLGGUHWUROlQN LVXHOOVLNW9NP F=1 F=0,1 F=0,01 F=0,001 F=10 F=100 )LJXU5lFNYLGGVGLDJUDPI UUHWUROlQNVRPIXQNWLRQDYYLVXHOOVLNW)DNWRUQ) PHGGDWD HQOLJWHNQLVNDGDWDQHGDQ)DQJHUVlPUHRFK)!ElWWUHSUHVWDQGD Överföringshastighet Upp till 1 Gbit/s i framtiden, idag 10 Mb/s. BER < 10-5 Länketablering Den belysande lasern inriktas med hjälp av annan information t.ex. via visuell, IR eller radarinformation. Man kan tänka sig olika nivåer för inriktningen: Manuell inriktning, typ kikare för korthållskommunikation (1-3 km) Lasern sammonteras med existerande siktesplattform och följning sker via TV/IRtracker. Exempel från fartyg till UAV.
25 24 Lasern har en egen avsökning inom ett smalt (upp till 1-2 grader) synfält anvisat av TV/IR eller radar. Lasern söker och låser automatiskt mot reflektorn. I detta fall kan ny teknik för icke-mekanisk strålstyrning bli intressant (se nedan). Lasern sammonteras med ett lasersystem med egen förmåga till spaning och länketablering genom detektion av retroreflex, t.ex. DIRCM samt flygburen djupsonderande laser typ Hawk-Eye. Tid för länketablering (efter målinvisning) < 1 sekund. 7HNQLVNDGDWD Nedanstående tabell ger tekniska data för en tänkt retrolänk. För beteckningar hänvisas till laser/optroniklitteraturen. 3DUDPHWHU 9lUGH 3DUDPHWHU 9lUGH Lasereffekt [W] 1 Bandbredd Bw [Hz] 1,0 x 10-9 Stråldivergens [mrad] 1 NEP [W/Hz 1/2 ] 0,19 x Pekjitter [mrad] 0,33 6,00833 x 10-9 NEP det Sändaraperturdiam- [m] 0,03 FOV m -[mrad] 2 Våglängd [µm] 0,8 λ (filter)-[nm] 1 Mottagardiameter- [m] 0,1 H λ [W/sr/nm] 0-sol Retrodiameter [m] 0,1 Resp [A/W]) 0,4 Retrovinkel [mrad] 0,03 Mgain-detektor 135 Optikförlust 0,5 K eff -detektor 0,005 Vis sikt V-km Var. F-detektor 2, DEHOO7HNQLVNDGDWDI UWlQNWUHWUROlQN Vikt och volym Retromodulator < 10 gram, elektrisk effekt < 100 mw. Flera retromodulatorer kan behövas för att täcka större delen av hemisfären samt reducera inflytande av scintillationer (fading) p.g.a. turbulens i atmosfären. Lasersändare/lasermottagare: Manuell inriktning, diodlaser samt detektor som byggs in i handhållen kikare. Laserns uteffekt c:a mw. Totalvikt kikare < 1-2 kg. Laser i siktesplattform med länkavstånd upp till km. Lasereffekt 1-10 W. Laserenhet/mottagare 1-2 liter, 2-3 kg. Lasersändare inmonterad i DIRCM eller andra lasersystem-samutnyttjad mottagare/laser < 1 kg. Prisuppskattning Retromodulatorenhet: Laser/mottagarenhet: < 10 kkr vid utveckling av många enheter. 300 kkr exklusive följesystem.
26 25 8WYHFNOLQJVOlJHW Retrokommunikation NRL har visat retrokommunikation i systemtillämpning för UAV(se bilder nedan). FOI/Acreo/CTH tar fram en teknisk demonstrator inom fotonikprogrammet. Sverige har f.n. så vitt vi vet världsrekord i hastighet (17 Mbit/s) och kontrast hos modulatorn. 5HWURNRPPXQLNDWLRQ GHPR LLQWHUQDWLRQHOOWVDPDUEHWH 1DYDO5HVHDUFK/DEV15/IlOWI UV N 1-1/2 meter UAV med monterad retromodulatormatris (fem element) fungerar som fyr för följning samt dataöverföring. 5HWURPRGXODWRU )/&WHNQLN DWWVlWWDSnERMWLOOKDYV)2, %UDJJQ 04:L %UDJJ *D$ VXEVWUDW e )LJXU8WYHFNOLQJDYNRPSRQHQWHURFKGHPRDYUHWURNRPYLG15/RFK)2,VDPW$FUHR
27 26 Icke mekanisk strålstyrning. Icke mekanisk strålstyrning via optisk fasstyrning motiveras bl.a. av: Inga rörliga delar Låg vikt och volym Generering av multipla strålar Snabba (1 µs möjligt) Låg effektförbrukning. Optisk fasstyrda arrayer har många användningsområden, bl.a. adaptiv optik, multipel strålgenerering, elektronisk fokusering etc. Jämför mikrovågsteknik med digitala gruppantenner. 6/0 JHQHULVNWHNQRORJLVRPNDQDQYlQGDVWLOOP\FNHW $QGUDDQYlQGQLQJVRPUnGHQ 6WUnOVW\UQLQJVWUnOIRUPQLQJ 2SWLVND LQWHUFRQQHFWV 'LJLWDOKRORJUDIL $GDSWLYRSWLN [ /&6/0 SLVWRQJ VSHJODU FDHOHPHQW )LJXU gyhuvw)2,vwunovw\uqlqjvh[shulphqwxqghudqgudvwunovw\uqlqjvhqkhwhuphg6/0 WHNQLNI UVWUnOSHNQLQJRFKVWUnOI UElWWULQJNDQlYHQDQYlQGDVI UI UElWWULQJDY XSSO VQLQJLSDVVLYDV\VWHP
28 27 )LJXU5D\WKHRQNRQFHSWI
29 28
30 29 '/DVHUUDGDU 0RWLYI U'ODVHUUDGDU Ett problem med passiva optiska sensorer för måligenkänning är att bakgrundssignatur och klotter varierar, vilket gör att sensorn blir känslig för atmosfärseffekter (vind, temperatur) och skillnader beroende på solens läge. IR-sensorer ger fördelar i mörker men är begränsade avseende upplösning över längre avstånd (>3 km), då stor optik krävs (>20 cm) tillsammans med många pixlar (hög pixelnoggrannhet) i fokalplanet. Passiva optiska sensorer är också relativt enkla att störa ut med lasrar och andra ljuskällor. Användandet av laserbaserade sensorer kan röja användaren, men rätt avpassad belysning (låg kontinuerlig effekt koherent teknik; hög tillfällig effekt enskilda pulser) kan denna risk reduceras. Sensorn är också svårare att störa ut då sensorelementen endast behöver vara aktiverade/exponerade under belysningen. I offensiva tillämpningar uppvägs röjningsrisk av stora fördelar som t.ex. penetration av vegetation, kamouflage, erhållandet av avståndsinformation, 3D-avbildning, vibrationssignaturer, m.m. Aktiv hyperspektral information (färg på natten) + 3 D är speciellt intressant vid användning i mörker. En laserradar kan avbilda omgivningen med cm upplösning vilket leder till helt nya förmågor. Vi skall kommentera några av dessa som är relevanta för UAV. $XWRPDWLVNPnOLJHQNlQQLQJ Som en tumregel krävs 200 pixlar över målet och cm avtåndsupplösning i längsled samt 40 cm tvärupplösning för robust ID [9]. Beroende på använd mottagaroptik och laserprestanda kan detta realiseras ut till km om så är nödvändigt. Följande egenskaper gör 3 D avbildning attraktiv för ATR. Målets storlek och avståndsinnehåll är robust signatur till skillnad mot termisk IR eller TV-system som är beroende av sol/skugga etc. Man erhåller målets aspekt vilket snabbt reducerar korrelationsproblemet mot målbiblioteket. Robust mot existerande motmedel. Processering är robust en av de få tekniker som visat sig fungera i reella tillämpningar [10]. Template matchning samt fingeravtryck mäter karakteristiska måldimensioner ned till cmnivå. 1\DDQGUDI UPnJRUPHG'DYELOGQLQJXSSO VQLQJFP Ger hotriktning till fordon, LV etc. Tillåter detektion samt igenkänning av svåra mål under vegetation, i skugga, bakom rök och eld etc. Lämplig för skillnadsdetektion som spaningsform.
31 30 Underlättar styrning och navigering speciellt lågflygning i terräng och bebyggelse. Förstärkt syn (augmented vision) innebär att man överlagra andra data till den scen som en aktiv eller passiv sensor för tillfället betraktar. Ett konkret exempel kan t.ex. vara en UAV som kan se i nedsatt sikt, även på längre håll, genom att dess FLIR eller TV bild överlagras en syntetisk 3 D scen där stationära eller rörliga mål erhållna från andra sensorer kan markeras. 3 D informationen kan införas från en databas eller ev. införas on line från en laserradar från samma plattform eller en framförvarande plattform. Ökar drastiskt möjligheten att agera i realistiska högupplösta syntetiska omgivningar som kan användas för noggrann uppdragsplanering. Tillåter noggrann målinmätning och styrning mot en optimal träffpunkt på målet, antingen via semiaktiv laserpekning eller laserledstrålestyrning alternativt via 3 D sensor i målsökaren. För mindre synfält kan FLASH 3 D fokalplanearray (FPA) ge full 3 D bild på någon ns alltså inga hårda krav på bildstabilisering p.g.a. plattformsvibration. )LJXU+ JXSSO VW'ELOGDYVWULGVYDJQ 7HNQLNOlJHW En översikt av teknik för laserbaserad 3 D avbildning är under utgivande [11]. 6FDQQDQGHV\VWHP Scannande laserradar finns i ett stort antal konfigurationer för civil terrängkartering. Kompakta militära versioner finns bl.a. i LOCAAS samt i ett antal andra projekt för UAV och robottillämpningar. Ett flertal system för civil kartering finns på marknaden, och intresset ökar. Den laserpulsenergi som krävs för att få markekon från några hundra meters höjd ligger för en typisk mottagarstorlek (5-10 cm) kring 10 µj. Från detta kan vi uppskatta den nödvändiga medellasereffekten för att uppnå en viss sonderingstäthet, säg 16 punkter per m 2, och viss avsökningshastighet. Vi antar att vi har ett stråk som är 0.7 x flyghöjden. För 100 km 2 /h och 16 punkter/m 2 krävs c:a 1 W i lasereffekt, en relativt blygsam siffra. Från 300 meters höjd motsvarar detta en flyghastighet på 132 m/s (475 km/h).
32 31 )LJXU([HPSHOSnHQW\SLVNFLYLOWHUUlQJNDUWHULQJVODVHU6\VWHPPHGODVHUSXOVIUHNYHQVHU XSSHPRWN+]ILQQVSnPDUNQDGHQ%LOG2SWHFK,QF.DQDGD )LJXU 6\QWHWLVNY\L'JHQHUHUDGPHGKMlOSDYIO\JEXUHQVFDQQDQGHODVHUUDGDU7RS (\HRFKGDWDIXVLRQPHGIRWRJUDIL%LOG±)2,/DVHUV\VWHP I Figur 5.2 visas ett exempel på ett kommersiellt laserscansystem och i Figur 5.3 exempel på en högupplöst (c:a cm) syntetisk omgivning av Kvarn utanför Linköping. Omgivningen är uppbyggd från laseravståndsdata och en matchad textur från ett flygfoto samt vissa digitalfoton. ''DYELOGQLQJXWDQVFDQQLQJ Tidstyrda bildförstärkarrör används för att uppnå bl.a. långräckviddig måligenkänning. Principen brukar benämnas grindad avbildning (gated viewing, GV) Genom att glida med kort grindlucka kan man generera 3 D avbildning av målet. Det finns numera rör som är känsliga för den ögonsäkra laservåglängden 1.5 µm. För 2 D avbildning kommer räckvidden att begränsas av visuell sikt, laserpulsenergi, mottagarstorlek och mottagarkänslighet. Typiskt kan räckvidder upp till dubbla siktavståndet uppnås. En passiv CCD sensor registrerar kontrast och har en räckvidd som begränsas av visuell sikt. I ett tidsgrindat system är det den inherenta mål-bakgrundskontrasten som är relevant eftersom kontrastförlust p.g.a. atmosfären grindas bort.
33 32 Förmåga att se in i terrängen med grindad avbildning illustreras i Figur 5.4. Här ser vi hur grindluckan successivt flyttas in mot skogsdungen och avslöjar mål inne i dungen (terrängbil). Dessutom visas hur ett fordon bakom ett kamouflagenät avslöjas bl.a. genom de starka reflexer som de släckta strålkastarna ger upphov till. )LJXU%LOGHUPHGHWW*9V\VWHP%LOG)2,>@ Ett antal successiva grinluckor användas för att bygga upp en 3 D bild som underlättar för automatisk måligenkänning. Det krävs c:a 200 pixlar på målet och 15 cm avståndsupplösning för att nå goda resultat med ATR utnyttjande 3 D [12]. I Figur 5.5 nedan illustreras hur detta kan se ut med ett exempel från ett GV försök från Älvdalen. 7 km Bibliotek-högupplöst Sampla ned Matcha mot mätt )LJXU gyhuvwwyhqy\ YHUbOYGDOHQPHGPnOLWHUUlQJHQ,H[HPSOHWYLVDVKXUHQ WHUUlQJELOHIWHUYLVVELOGEHKDQGOLQJNDQVHVDYHQRSHUDW U1RWHUDSHUVRQHQ LQQHLELOHQ(Q,5NDPHUDPHGVDPPDRSWLNVWRUOHNVNXOOHLQWHKDNXQQDWJHGHQQD XSSO VQLQJ
34 33 På sikt kommer 2 D avbildning med grindad teknik att ersättas av full 3 D avbildning. En intensiv utveckling av 3 D avkännande arrayer pågår bl.a. i USA och är under uppstart i Europa. I kommande FOI rapport [11] har prestanda för en 3 D FPA array beräknats byggande på resultat från laboratorieprototyper främst från USA. Principen för 3 D array visas i Figur 5.8. Exempel på utförande visas i Figur 5.9. Receiver Focal Plane Array (M x N Detectors) Laser Laser Flash Illuminated Area Receiver Single Pixel FOV Array Outp ut Processor ATR Receiver Total FOV (N x N Pixels) )LJXU3ULQFLSHQI U'DYELOGQLQJPHGDYVWnQGVDYNlQQDQGHIRNDOSODQHDUUD\' )3$ELOG5D\WKHRQ>@ )LJXU([HPSHOSnHQ')3$EDVHUDGSnVNDYDODQFKHIRWRGLRGPDUWLV$3')LJXUHQ YLVDUHQDUUD\IUnQ/LQFROQ/DERUDWRULHV>@


35 34 7UXFK EHKLQGWUHHV )LJXU%LOGHUIUnQ79&&'WYVDPWHQ')3$DUUD\WK1RWHUDKXULSULQFLSHWWHQGD ODVHUVNRWWNDQJHHQ'ELOGVRPNDQURWHUDVRFKOlWWDYVO MDUIRUGRQHQEDNRPEX VNDJHW) UYLGDUHGLVNXVVLRQVHWH[WHQQHGDQ I Figur 5.8 visas ett exempel från passiva och aktiva bilder från Lincoln Lab 9. Den visar t.v. CCD och t.h. en avståndsbild med färgkodar avstånd. Notera hur avståndsbilden kan roteras och avslöja de båda fordonen bakom buskaget. I TV-CCD bilden är bara det ena fordonet synligt. Notera även hur mycket känsligare man kan göra laserdetektorarrayen visavi TV CCD:n som använder dagsljus. Genom tidsstyrd förstärkning kan APD-arrayen göra så känslig att man kan räkna fotoner i varje pixel. Parametern N pe refererar till antal fotoelektroner/pixel/frame. Bilderna motsvars av en sammanlagring av 200 frames. För CCD:n erhålles en godtagbar bild ned till N pe IRWRQHUPHGDQODVHUELOGHQlUIXOOWDQYlQGEDUQHG till N pe IRWRQHU Utveckling av 3 D FPA pågår på flera företag och lab i USA. I Europa har utvecklingen just startat. Låt oss ge några exempel på vad som är möjligt med 3 D FPA. Figur 5.9 ger en vision av ett sammanbundet nät av högflygande radar-uav med GV för målidentifiering på långa håll samt när-uav för målidentifiering, eldledning, följning och verkansverifiering. Samverkan kan även tänkas ske med marksensornät.
36 35 UAV-svärmar-laserkom-laserr +marksensornät Optisk kommmunikation IR/GV 3 D laserr Marksensor )LJXU(WWWlQNEDUW8$9NRQFHSWPHGK JWIO\JDQGH8$9XWUXVWDGPHGOnJIUHNYHQVUDGDU VRPORNDOLVHUDUSRWHQWLHOODPnORFKVPn8$9PHG,5RFKODVHUUDGDUVRPPnOLGHQ WLILHUDUHOGOHGHURFKXWI UYHUNDQVYHULILHULQJ Med en högupplösande laserradar kan UAVn filtrera bort skylande träd och buskage och frilägga mål genom att utnyttja 3 D filtreringsmetoder. I Figur 5.10 visas ett simulerat exempel och i Figur 5.11 och Figur 5.12 exempel från riktiga data upptagna på FOI med scannande laserradarsystem. )LJXU7YHQVLPXOHUDGDYVWnQGVELOGIUnQHQ8$9EDVHUDGODVHUUDGDU7K9LVDVKXU GHQILOWUHULQJVDOJRULWPVRPXWYHFNODWVYLG)2,ODVHUV\VWHPNDQDQYlQGDVI UDWW WDERUW YHJHWDWLRQ
2, PHG VFDQQDQGH ODVHUUDGDU,/5,6 '")
37 36 3 D laserradar ser allt )LJXU 6HNYHQV DY ' ODVHUUDGDUELOGHU IUnQ ROLND Y\HU JHU P MOLJKHW DW VH YDG VRP EHILQQHU XQGHU GHQ WlWD GXQJHQ JHQRP DWW NRPELQHUD PXOWLSOD Y\HU %LOG )2, PHG VFDQQDQGH ODVHUUDGDU,/5,6 ' 2SWHF
 återfinnes i en nyligen publicerad FOI rapport som även jämför lasersensorer, passiva EO sensorer och lågfrekvent radar.")

38 37 )LJXU ([HPSHOSn'GDWDIUnQ7RS(\HRFK,/5,6'LOOXVWUHUDQGHKXUHQ8$9NDQ IO\JD YHUPHGHQODVHUUDGDUI UHWWGHOVNDUWHUDWHUUlQJPHQlYHQDWWXSSWlFND PnO'DWD)2,IUnQ7 QQHUVM En genomgång av laserradarteknik för UAV m.a.p. på vegetationskartering [15] (även relevant för måligenkänning) återfinnes i en nyligen publicerad FOI rapport som även jämför lasersensorer, passiva EO sensorer och lågfrekvent radar. Teknik för 3 D FPA har nyligen börjat demonstreras för vegetationspenetrerande laser radar via multipla vyer, se Figur I detta exempel har man råkar använda grön laser i taktiska tillämpningar kommer 1.06 eller 1.56 µm förmodligen att användas. )LJXU([HPSHOSnPnOXQGHUWUlGGHWHNWLRQPHG')3$WHNQLNgYHUVWVFHQRFK V\VWHPSDUDPHWUDUXQGHUIUnQYlQVWHUWLOOK JHUNRQVHNXWLYDODVHUVNRWWPHGWLOO K UDQGHELOGHULPLWWHQI UVWHNRVRPJHUWRSSHQSnWUlGNURQRUQDRFKWYVLVWD HNRWVRPV\QOLJJ UELOHQXQGUHGHQWlWDYHJHWDWLRQHQ)UnQ*HOEDUWHWD>@
Jaktrobot RB27 och RB28 Falcon
 Sida 1(5) RB27/RB28 RB27 Operativ tidsperiod /===============================/==================/ ------- -------- -------- -------- -------- -------- -------- -------- -------- -------- --------- --------
Sida 1(5) RB27/RB28 RB27 Operativ tidsperiod /===============================/==================/ ------- -------- -------- -------- -------- -------- -------- -------- -------- -------- --------- --------
Martin Eklöf, Johan Pelo, Jenny Ulriksson, Dag Wallström
 TOTALFÖRSVARETS FORSKNINGSINSTITUT Systemteknik 172 90 Stockholm FOI-R--0322--SE December 2001 ISSN 1650-1942 $QYlQGDUUDSSRUW Martin Eklöf, Johan Pelo, Jenny Ulriksson, Dag Wallström 6W\UQLQJDYVDPYHUNDQGHURERWV\VWHP
TOTALFÖRSVARETS FORSKNINGSINSTITUT Systemteknik 172 90 Stockholm FOI-R--0322--SE December 2001 ISSN 1650-1942 $QYlQGDUUDSSRUW Martin Eklöf, Johan Pelo, Jenny Ulriksson, Dag Wallström 6W\UQLQJDYVDPYHUNDQGHURERWV\VWHP
Arboga Robotmuseum RB27/RB28
 Sida 1(5) Operativ tidsperiod RB27/RB28 RB27 /----------------------/----------/ -- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- 1950 1960 1970 1980 1990 2000 Robot RB27 och RB28 tillhör den amerikanska
Sida 1(5) Operativ tidsperiod RB27/RB28 RB27 /----------------------/----------/ -- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- 1950 1960 1970 1980 1990 2000 Robot RB27 och RB28 tillhör den amerikanska
med anledning av skr. 2017/18:290 Anskaffning av medelräckviddigt luftvärn
 Kommittémotion SD Motion till riksdagen 2018/19:59 av Roger Richtoff m.fl. (SD) med anledning av skr. 2017/18:290 Anskaffning av medelräckviddigt luftvärn Förslag till riksdagsbeslut 1. Riksdagen ställer
Kommittémotion SD Motion till riksdagen 2018/19:59 av Roger Richtoff m.fl. (SD) med anledning av skr. 2017/18:290 Anskaffning av medelräckviddigt luftvärn Förslag till riksdagsbeslut 1. Riksdagen ställer
Rapportering som krävs utöver LIPS-dokumenten: poster föredrag där projektets genomförande och resultat beskrivs hemsida som beskriver projektet
 Sida 1 Projektnamn Utveckling och implementering av regulator för styrning av gimbalmonterade sensorer i UAV:er Beställare Jon Kronander (ISY - Reglerteknik) Projektledare Student Projektbeslut Morgan
Sida 1 Projektnamn Utveckling och implementering av regulator för styrning av gimbalmonterade sensorer i UAV:er Beställare Jon Kronander (ISY - Reglerteknik) Projektledare Student Projektbeslut Morgan
FMV. Marinens utveckling
 FMV Marinens utveckling Marina förutsättningar Niklas Gustafsson/Försvarsmakten Marinens utveckling Med anledning av den aktuella försvarsdebatten känns det angeläget att beskriva marinens uppgifter och
FMV Marinens utveckling Marina förutsättningar Niklas Gustafsson/Försvarsmakten Marinens utveckling Med anledning av den aktuella försvarsdebatten känns det angeläget att beskriva marinens uppgifter och
Framtidens sportflygplan. En studie av möjliga koncept med grön framdrivning. Patrick Berry Fluid and Mechatronic Systems
 Framtidens sportflygplan. En studie av möjliga koncept med grön framdrivning Patrick Berry Fluid and Mechatronic Systems Inledning Nästa generations sportflygplan kommer att behöva en radikal förändring
Framtidens sportflygplan. En studie av möjliga koncept med grön framdrivning Patrick Berry Fluid and Mechatronic Systems Inledning Nästa generations sportflygplan kommer att behöva en radikal förändring
Vindkraft och Försvarets sensorer m.m.
 Vindkraft och Försvarets sensorer m.m. Per Nordlöf FM frekvenshandläggning per.nordlof@mil.se Frekvenskontoret: smo@mil.se Peter Modigh - Försvarets Bildbyrå Lasse Sjögren - Försvarets Bildbyrå Försvarets
Vindkraft och Försvarets sensorer m.m. Per Nordlöf FM frekvenshandläggning per.nordlof@mil.se Frekvenskontoret: smo@mil.se Peter Modigh - Försvarets Bildbyrå Lasse Sjögren - Försvarets Bildbyrå Försvarets
Utveckling av siktlinjesindikatorer till JA37 och JAS39
 Flygtekniska föreningens tidskrift Nr 3/2012 Utveckling av siktlinjesindikatorer till JA37 och JAS39 Göte Svedenkrans, som i år tilldelades Thulinmedaljen i silver, höll ett föredrag om utvecklingen av
Flygtekniska föreningens tidskrift Nr 3/2012 Utveckling av siktlinjesindikatorer till JA37 och JAS39 Göte Svedenkrans, som i år tilldelades Thulinmedaljen i silver, höll ett föredrag om utvecklingen av
LIPs Fredrik Ljungberg ChrKr Projektdirektiv18_ROV.doc CKr
 Fredrik Ljungberg 2018-08-28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Parter Projektets bakgrund och Remotely Operated Underwater Vehicle Fredrik Ljungberg, ISY
Fredrik Ljungberg 2018-08-28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Parter Projektets bakgrund och Remotely Operated Underwater Vehicle Fredrik Ljungberg, ISY
Sex frågor du bör ställa dig innan du väljer M2M-uppkoppling
 GUIDE Sex frågor du bör ställa dig innan du väljer M2M-uppkoppling Inom de flesta branscher utvecklas idag nya och innovativa applikationer och tjänster för att bättre kunna monitorera, analysera och styra
GUIDE Sex frågor du bör ställa dig innan du väljer M2M-uppkoppling Inom de flesta branscher utvecklas idag nya och innovativa applikationer och tjänster för att bättre kunna monitorera, analysera och styra
Larm innan inkräktaren bryter sig in! Teletec Connect AB 08-602 16 00
 Utomhusla Larm innan inkräktaren bryter sig in! 42 rm OPTEX presenterar ett brett sortiment av utomhusdetektorer, både med passiva IRdetektorer och aktiva linjedetektorer. En dröm om en perfekt larmanläggning,
Utomhusla Larm innan inkräktaren bryter sig in! 42 rm OPTEX presenterar ett brett sortiment av utomhusdetektorer, både med passiva IRdetektorer och aktiva linjedetektorer. En dröm om en perfekt larmanläggning,
Mer information om laserscanner
 Säkerhet Säkerhetslaserscanner Mer information om laserscanner Allmän information Vad är en laserscanner? En laserscanner är en optisk sensor som skannar omgivningen i två dimensioner med hjälp av infraröda
Säkerhet Säkerhetslaserscanner Mer information om laserscanner Allmän information Vad är en laserscanner? En laserscanner är en optisk sensor som skannar omgivningen i två dimensioner med hjälp av infraröda
Vinkelupplösning, exempel hålkameran. Vinkelupplösning När är två punkter upplösta? FAF260. Lars Rippe, Atomfysik/LTH 1. Böjning i en spalt
 Kursavsnitt Böjning och interferens Böjning i en spalt bsin m m 1,... 8 9 Böjning i en spalt Böjning i cirkulär öppning med diameter D Böjningsminimum då =m Första min: Dsin 1. 10 11 Vinkelupplösning,
Kursavsnitt Böjning och interferens Böjning i en spalt bsin m m 1,... 8 9 Böjning i en spalt Böjning i cirkulär öppning med diameter D Böjningsminimum då =m Första min: Dsin 1. 10 11 Vinkelupplösning,
Copyright 2001 Ulf Rääf och DataRäven Elektroteknik, All rights reserved.
 Ver 2001-03-31. Kopieringsförbud. Detta verk är skyddat av upphovsrättslagen! OBS! Kopiering i skolar enligt avtal ( UB4 ) gäller ej! Den som bryter mot lagen om upphovsrätt kan åtalas av allmän åklagare
Ver 2001-03-31. Kopieringsförbud. Detta verk är skyddat av upphovsrättslagen! OBS! Kopiering i skolar enligt avtal ( UB4 ) gäller ej! Den som bryter mot lagen om upphovsrätt kan åtalas av allmän åklagare
Laserteknologier för telekrigstillämpningar
 Laserteknologier för telekrigstillämpningar En översikt av teknikutvecklingen MARKUS HENRIKSSON, LARS SJÖQVIST FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet. Kärnverksamheten
Laserteknologier för telekrigstillämpningar En översikt av teknikutvecklingen MARKUS HENRIKSSON, LARS SJÖQVIST FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet. Kärnverksamheten
Informationsfusion - en nyckelteknologi för informationsöverlägsenhet. Per Svensson
 Informationsfusion - en nyckelteknologi för informationsöverlägsenhet Per Svensson Inst f Data- och informationsfusion Totalförsvarets forskningsinstitut Per Svensson okt. -01 1 Ledning som kommunikation:
Informationsfusion - en nyckelteknologi för informationsöverlägsenhet Per Svensson Inst f Data- och informationsfusion Totalförsvarets forskningsinstitut Per Svensson okt. -01 1 Ledning som kommunikation:
Fysik (TFYA14) Fö 5 1. Fö 5
 Fö 5 1. Fö 5") Fysik (TFYA14) Fö 5 1 Fö 5 Kap. 35 Interferens Interferens betyder samverkan och i detta fall samverkan mellan elektromagnetiska vågor. Samverkan bygger (precis som för mekaniska vågor) på superpositionsprincipen
Fysik (TFYA14) Fö 5 1 Fö 5 Kap. 35 Interferens Interferens betyder samverkan och i detta fall samverkan mellan elektromagnetiska vågor. Samverkan bygger (precis som för mekaniska vågor) på superpositionsprincipen
Civilt försvar Elförsörjningens beredskapsplanering påbörjas. Magnus Lommerdal
 Civilt försvar Elförsörjningens beredskapsplanering påbörjas Magnus Lommerdal Elförsörjningens beredskapsplanering påbörjas > Svenska kraftnäts uppdrag > Tillbakablick och förändrade förutsättningar >
Civilt försvar Elförsörjningens beredskapsplanering påbörjas Magnus Lommerdal Elförsörjningens beredskapsplanering påbörjas > Svenska kraftnäts uppdrag > Tillbakablick och förändrade förutsättningar >
Datum Kursens benämning: Grundkurs Militärteknik, Militära medel. Engelsk benämning: Basic Course Military Technology, Military means
 1 (6) Kursplan Kursens benämning: Grundkurs Militärteknik, Militära medel Engelsk benämning: Basic Course Military Technology, Military means Kurskod: 1OP418 Gäller från: Höstterminen 2016 Fastställd:
1 (6) Kursplan Kursens benämning: Grundkurs Militärteknik, Militära medel Engelsk benämning: Basic Course Military Technology, Military means Kurskod: 1OP418 Gäller från: Höstterminen 2016 Fastställd:
Blue Line-rörelsedetektorer Detektering för trygghet
 Blue Line-rörelsedetektorer Detektering för trygghet Säkerhet du kan lita på Blue Line Gen 2-rörelsedetektorer Oavsett om det är ett hem, en butik eller annat företag behöver systemen vara pålitliga. Med
Blue Line-rörelsedetektorer Detektering för trygghet Säkerhet du kan lita på Blue Line Gen 2-rörelsedetektorer Oavsett om det är ett hem, en butik eller annat företag behöver systemen vara pålitliga. Med
Föreläsning 6: Opto-komponenter
 Föreläsning 6: Opto-komponenter Opto-komponent Interaktion ljus - halvledare Fotoledare Fotodiod / Solcell Lysdiod Halvledarlaser 1 Komponentfysik - Kursöversikt Bipolära Transistorer pn-övergång: kapacitanser
Föreläsning 6: Opto-komponenter Opto-komponent Interaktion ljus - halvledare Fotoledare Fotodiod / Solcell Lysdiod Halvledarlaser 1 Komponentfysik - Kursöversikt Bipolära Transistorer pn-övergång: kapacitanser
Cargolog Impact Recorder System
 Cargolog Impact Recorder System MOBITRON Mobitron AB Box 241 561 23 Huskvarna, Sweden Tel +46 (0)36 512 25 Fax +46 (0)36 511 25 Att mäta är att veta Vi hjälper dig och dina kunder minska skador och underhållskostnader
Cargolog Impact Recorder System MOBITRON Mobitron AB Box 241 561 23 Huskvarna, Sweden Tel +46 (0)36 512 25 Fax +46 (0)36 511 25 Att mäta är att veta Vi hjälper dig och dina kunder minska skador och underhållskostnader
Områdesövervakning - Områdesövervakning inklusive kameraövervakning
 SvK4005, v3.3, 2012-08-09 VÅR BETECKNING TR09-06 DATUM 2007-04-04 TEKNISK RIKTLINJE UTGÅVA A Områdesövervakning - Områdesövervakning inklusive kameraövervakning Inledning Under senare år har elbranschen
SvK4005, v3.3, 2012-08-09 VÅR BETECKNING TR09-06 DATUM 2007-04-04 TEKNISK RIKTLINJE UTGÅVA A Områdesövervakning - Områdesövervakning inklusive kameraövervakning Inledning Under senare år har elbranschen
Störning av multisensorsystem - en förstudie
 Juni 2003 ISSN 1650-1942 Användarrapport Börje Andersson, Bengt Boberg, Göran Bolander, Anders Eneroth, Staffan Gadd, Ove Gustavsson, Nils Karlsson, Peter Klum, Claes Nelsson, Ove Steinvall, Thomas Svensson,
Juni 2003 ISSN 1650-1942 Användarrapport Börje Andersson, Bengt Boberg, Göran Bolander, Anders Eneroth, Staffan Gadd, Ove Gustavsson, Nils Karlsson, Peter Klum, Claes Nelsson, Ove Steinvall, Thomas Svensson,
Tentamen i Fotonik , kl
 FAFF25-2015-05-04 Tentamen i Fotonik - 2015-05-04, kl. 14.00-19.00 FAFF25 - Fysik för C och D, Delkurs i Fotonik Tillåtna hjälpmedel: Miniräknare, godkänd formelsamling (t ex TeFyMa), utdelat formelblad.
FAFF25-2015-05-04 Tentamen i Fotonik - 2015-05-04, kl. 14.00-19.00 FAFF25 - Fysik för C och D, Delkurs i Fotonik Tillåtna hjälpmedel: Miniräknare, godkänd formelsamling (t ex TeFyMa), utdelat formelblad.
L 200/2 Europeiska unionens officiella tidning 25.7.2013
 L 200/2 Europeiska unionens officiella tidning 25.7.2013 1. En elektronisk styrenhet för en driftsspänning av högst 1 000 V (så kallad ABS-styrenhet) som en del av det elektroniska kontrollsystemet i ett
L 200/2 Europeiska unionens officiella tidning 25.7.2013 1. En elektronisk styrenhet för en driftsspänning av högst 1 000 V (så kallad ABS-styrenhet) som en del av det elektroniska kontrollsystemet i ett
Studie av målinformationsutbyte mellan samverkande robotar i nätverk
 September 2003 ISSN 1650-1942 Metodrapport Jan Gustavsson, Nils-Uno Jonsson, Nils Karlsson, Mathias Wilow Studie av målinformationsutbyte mellan samverkande robotar i nätverk Sensorteknik Box 1165 581
September 2003 ISSN 1650-1942 Metodrapport Jan Gustavsson, Nils-Uno Jonsson, Nils Karlsson, Mathias Wilow Studie av målinformationsutbyte mellan samverkande robotar i nätverk Sensorteknik Box 1165 581
Extra övningsuppgifter
 Optiska fibrer 1. En fiber har numerisk apertur 0,12 och kärnans brytningsindex är 1,4. Kärnans diameter är 7 µm. a) Vad är mantelns brytningsindex? b) För vilka våglängder är fibern en singelmodfiber?
Optiska fibrer 1. En fiber har numerisk apertur 0,12 och kärnans brytningsindex är 1,4. Kärnans diameter är 7 µm. a) Vad är mantelns brytningsindex? b) För vilka våglängder är fibern en singelmodfiber?
NORA III, en mångkanals AESA-radar
 NORA III, en mångkanals AESA-radar Flygtekniska Föreningen, Flygteknik 2010 Michael Granström Saab AB Electronic Defence Systems NORA III Agenda Bakgrund / Syfte Operativ nytta med AESA Sammanfattning
NORA III, en mångkanals AESA-radar Flygtekniska Föreningen, Flygteknik 2010 Michael Granström Saab AB Electronic Defence Systems NORA III Agenda Bakgrund / Syfte Operativ nytta med AESA Sammanfattning
TERTEC Evolution. Den perfekta High-tech Antenn Högsta kvalitet mottagning Extrem väderbeständig Perfekt för svåra mottagningssituationer
 Den perfekta High-tech Antenn Högsta kvalitet mottagning Extrem väderbeständig Perfekt för svåra mottagningssituationer Hus antenn är speciellt utformad för hemmabruk. Den uppfyller alla krav för optimal
Den perfekta High-tech Antenn Högsta kvalitet mottagning Extrem väderbeständig Perfekt för svåra mottagningssituationer Hus antenn är speciellt utformad för hemmabruk. Den uppfyller alla krav för optimal
LIPs Isak Nielsen ChrKr Projektdirektiv13_ROV.doc CKr
 Isak Nielsen 2013/08/28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Remotely Operated Underwater Vehicle Isak Nielsen, ISY Student Micael Derelöv och Isak Nielsen
Isak Nielsen 2013/08/28 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Remotely Operated Underwater Vehicle Isak Nielsen, ISY Student Micael Derelöv och Isak Nielsen
Global Positioning System GPS i funktion
 Global Positioning System GPS i funktion Martin Åhlenius ECOP mas00001@student.mdh.se Andreas Axelsen ECOP aan00006@student.mdh.se 15 oktober 2003 i Sammanfattning Denna rapport försöker förklara funktionen
Global Positioning System GPS i funktion Martin Åhlenius ECOP mas00001@student.mdh.se Andreas Axelsen ECOP aan00006@student.mdh.se 15 oktober 2003 i Sammanfattning Denna rapport försöker förklara funktionen
λ = T 2 g/(2π) 250/6 40 m
 250/6 40 m") Problem. Utbredning av vattenvågor är komplicerad. Vågorna är inte transversella, utan vattnet rör sig i cirklar eller ellipser. Våghastigheten beror bland annat på hur djupt vattnet är. I grunt vatten
Problem. Utbredning av vattenvågor är komplicerad. Vågorna är inte transversella, utan vattnet rör sig i cirklar eller ellipser. Våghastigheten beror bland annat på hur djupt vattnet är. I grunt vatten
AALTO CONTROL -SYSTEMET
 AALTO CONTROL -SYSTEMET TRÅDLÖS, CENTRALISERAT SYSTEM FÖR FJÄRRÖVERVAKNING AV ARMATURER MED INBYGGD RESERVKRAFT TRÅDLÖS TEKNOLOGI Trådlös övervakning för nödbelysningsarmaturer, upp till 5.000 armaturer
AALTO CONTROL -SYSTEMET TRÅDLÖS, CENTRALISERAT SYSTEM FÖR FJÄRRÖVERVAKNING AV ARMATURER MED INBYGGD RESERVKRAFT TRÅDLÖS TEKNOLOGI Trådlös övervakning för nödbelysningsarmaturer, upp till 5.000 armaturer
Inbrottsdetektor. We listened to you
 Inbrottsdetektor We listened to you Avancerad teknologi, gör valet enkelt Oavsett om du väljer Passiv Infraröd (PIR), Kombi- eller Vektorteknologi, har våra rörelsedetektorer ett antal inbyggda fördelar:
Inbrottsdetektor We listened to you Avancerad teknologi, gör valet enkelt Oavsett om du väljer Passiv Infraröd (PIR), Kombi- eller Vektorteknologi, har våra rörelsedetektorer ett antal inbyggda fördelar:
Håkan Tillander - Telenor, Networks/Radio
 Störningar i 700-bandet från -sändare i Norge och Danmark 2015-09-24 Håkan Tillander - Telenor, Networks/Radio Status för 700-bandet i Norden Sverige och Finland Planerar att tilldela 700-bandet för mobila
Störningar i 700-bandet från -sändare i Norge och Danmark 2015-09-24 Håkan Tillander - Telenor, Networks/Radio Status för 700-bandet i Norden Sverige och Finland Planerar att tilldela 700-bandet för mobila
Inriktning för markstridsförbandens luftvärnsfunktion
 Sida 1 (10) Inriktning för markstridsförbandens luftvärnsfunktion Innehållsförteckning 1. Regeringsbeslut 7, 2007-12-19, Fö2006/702/EPS (slutlig), Fö2007/166/EPS m.fl. Regleringsbrev för budgetåret 2008
Sida 1 (10) Inriktning för markstridsförbandens luftvärnsfunktion Innehållsförteckning 1. Regeringsbeslut 7, 2007-12-19, Fö2006/702/EPS (slutlig), Fö2007/166/EPS m.fl. Regleringsbrev för budgetåret 2008
Strålsäkerhetsmyndighetens författningssamling
 Strålsäkerhetsmyndighetens författningssamling ISSN: 2000-0987 SSMFS 2014:4 Strålsäkerhetsmyndighetens föreskrifter och allmänna råd om laser, starka laserpekare och intensivt pulserat ljus Strålsäkerhetsmyndighetens
Strålsäkerhetsmyndighetens författningssamling ISSN: 2000-0987 SSMFS 2014:4 Strålsäkerhetsmyndighetens föreskrifter och allmänna råd om laser, starka laserpekare och intensivt pulserat ljus Strålsäkerhetsmyndighetens
LIPs Martin Lindfors ChrKr Projdir2017_sbd.doc CKr
 Martin Lindfors 2017-08-22 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Minröjningssystem Martin Lindfors, ISY Student Torbjörn Crona och Martin Lindfors Läsperiod
Martin Lindfors 2017-08-22 Sida 1 Projektnamn Beställare Projektledare Projektbeslut Projekttid Rapportering Minröjningssystem Martin Lindfors, ISY Student Torbjörn Crona och Martin Lindfors Läsperiod
Föreläsning 6: Opto-komponenter
 Föreläsning 6: Opto-komponenter Opto-komponent Interaktion ljus - halvledare Fotoledare Fotodiod / Solcell Lysdiod Halvledarlaser Dan Flavin 2014-04-02 Föreläsning 6, Komponentfysik 2014 1 Komponentfysik
Föreläsning 6: Opto-komponenter Opto-komponent Interaktion ljus - halvledare Fotoledare Fotodiod / Solcell Lysdiod Halvledarlaser Dan Flavin 2014-04-02 Föreläsning 6, Komponentfysik 2014 1 Komponentfysik
Lokalt ITinfrastrukturprogram
 Lokalt ITinfrastrukturprogram 2007 2012 BILAGA 5 Översikt av tekniska lösningar Version: 0.99 (2010-05-17) - ARBETSMATERIAL - IT-KONTORET IT-INFRASTRUKTURPLAN 2007-2012 Sida 2 av 6 ÖVERSIKT AV OLIKA TEKNIKER
Lokalt ITinfrastrukturprogram 2007 2012 BILAGA 5 Översikt av tekniska lösningar Version: 0.99 (2010-05-17) - ARBETSMATERIAL - IT-KONTORET IT-INFRASTRUKTURPLAN 2007-2012 Sida 2 av 6 ÖVERSIKT AV OLIKA TEKNIKER
Förbättrad marklägesbild med förändringsanalys av högupplösta radarsatellitbilder
 Förbättrad marklägesbild med förändringsanalys av högupplösta radarsatellitbilder DLR Fjärranalysdagarna 2009-03-10 Johan Rasmusson Informationssystem Översikt Inledning Insamling av information till marklägesbilden
Förbättrad marklägesbild med förändringsanalys av högupplösta radarsatellitbilder DLR Fjärranalysdagarna 2009-03-10 Johan Rasmusson Informationssystem Översikt Inledning Insamling av information till marklägesbilden
3D-stadsmodeller utgående från NNHlaserdata
 3D-stadsmodeller utgående från NNHlaserdata Simon Ahlberg, FORAN Remote Sensing AB Khashayar Farmanbar, Agency9 AB Sammanfattning FORAN Remote Sensing AB arbetar sedan länge med att ur laserdata ta fram
3D-stadsmodeller utgående från NNHlaserdata Simon Ahlberg, FORAN Remote Sensing AB Khashayar Farmanbar, Agency9 AB Sammanfattning FORAN Remote Sensing AB arbetar sedan länge med att ur laserdata ta fram
Datum Kursens benämning: Grundkurs Militärteknik för Officersprogrammet
 1 (5) Kursplan Kursens benämning: Grundkurs Militärteknik för Officersprogrammet Engelsk benämning: Basic Course Military Technology for the Officers' Programme Kurskod: 1OP470 Gäller från: Höstterminen
1 (5) Kursplan Kursens benämning: Grundkurs Militärteknik för Officersprogrammet Engelsk benämning: Basic Course Military Technology for the Officers' Programme Kurskod: 1OP470 Gäller från: Höstterminen
Regler för sumo under Robot-SM
 Regler för sumo under Robot-SM Uppdateringar: 2015-02-11 - Uppdaterade regler för Lego-sumo (2.9, 4), samt specning av vilka klasser som startmodul är obligatoriskt för (2.6). 2014-02-18 - Ny bild för
Regler för sumo under Robot-SM Uppdateringar: 2015-02-11 - Uppdaterade regler för Lego-sumo (2.9, 4), samt specning av vilka klasser som startmodul är obligatoriskt för (2.6). 2014-02-18 - Ny bild för
Kulor av ljus Översikt av tillämpningar och teknik för laservapen
 FOI-R--0920--SE Juni 2003 ISSN 1650-1942 Underlagsrapport Ove Steinvall, Lars Sjöqvist Kulor av ljus Översikt av tillämpningar och teknik för laservapen Sensorteknik 581 11 Linköping TOTALFÖRSVARETS FORSKNINGSINSTITUT
FOI-R--0920--SE Juni 2003 ISSN 1650-1942 Underlagsrapport Ove Steinvall, Lars Sjöqvist Kulor av ljus Översikt av tillämpningar och teknik för laservapen Sensorteknik 581 11 Linköping TOTALFÖRSVARETS FORSKNINGSINSTITUT
4 Paket- och kretskopplade nät
 4 Paket- och kretskopplade nät Kommunikationssystem 2G1501 Syftet: Syftet med detta kapitel är att förstå egenskaperna hos, och skillnaderna mellan, de tre olika kopplade nätverkstyperna kretskopplade
4 Paket- och kretskopplade nät Kommunikationssystem 2G1501 Syftet: Syftet med detta kapitel är att förstå egenskaperna hos, och skillnaderna mellan, de tre olika kopplade nätverkstyperna kretskopplade
TAKTISKA KRAV OCH MÅLSÄTTNINGAR FÖR HEMVÄRNSPLUTON / HEMVÄRNSINSATSPLUTON 1 Taktiska krav för hemvärnspluton/hemvärnsinsatspluton
 2007-11-07 HKV01 631:77504 Sida 1 (11) TAKTISKA KRAV OCH MÅLSÄTTNINGAR FÖR HEMVÄRNSPLUTON / HEMVÄRNSINSATSPLUTON 1 Taktiska krav för hemvärnspluton/hemvärnsinsatspluton 1.1 Huvuduppgifter H1 H2 H3 Bevaka
2007-11-07 HKV01 631:77504 Sida 1 (11) TAKTISKA KRAV OCH MÅLSÄTTNINGAR FÖR HEMVÄRNSPLUTON / HEMVÄRNSINSATSPLUTON 1 Taktiska krav för hemvärnspluton/hemvärnsinsatspluton 1.1 Huvuduppgifter H1 H2 H3 Bevaka
Dokumenteringar av mätningar med TLC (Thermocrome liquid crystals)
") Dokumenteringar av mätningar med TLC (Thermocrome liquid crystals) Utförda under hösten -99. KTH Energiteknik, Brinellvägen 60, klimatkammare 3 av Erik Björk Sammanfattning Mätningar utfördes med s.k.
Dokumenteringar av mätningar med TLC (Thermocrome liquid crystals) Utförda under hösten -99. KTH Energiteknik, Brinellvägen 60, klimatkammare 3 av Erik Björk Sammanfattning Mätningar utfördes med s.k.
FELSIGNALSYSTEM. TEKNISK RIKTLINJE 2006-04-13 TR02-08-2 utg E 1/11. NK, Kontrollanläggning DATUM 2006-04-13 TEKNISK RIKTLINJE UTGÅVA E
 SvK4005, v3.3, 2012-08-09 ENHET, VERKSAMHETSOMRÅDE NK, Kontrollanläggning VÅR BETECKNING TR02-08-2 DATUM 2006-04-13 TEKNISK RIKTLINJE UTGÅVA E FELSIGNALSYSTEM 1/11 Uppdateringar Utgåva Ändringsnot Datum
SvK4005, v3.3, 2012-08-09 ENHET, VERKSAMHETSOMRÅDE NK, Kontrollanläggning VÅR BETECKNING TR02-08-2 DATUM 2006-04-13 TEKNISK RIKTLINJE UTGÅVA E FELSIGNALSYSTEM 1/11 Uppdateringar Utgåva Ändringsnot Datum
Projekt 5 Michelsoninterferometer Fredrik Olsen Roger Persson
 Projekt 5 Michelsoninterferometer Fredrik Olsen Roger Persson 2007-11-01 Inledning En interferometer är ett mycket precist verktyg för att exempelvis mäta avstånd eller skillnader i våglängder. Konstruktionen
Projekt 5 Michelsoninterferometer Fredrik Olsen Roger Persson 2007-11-01 Inledning En interferometer är ett mycket precist verktyg för att exempelvis mäta avstånd eller skillnader i våglängder. Konstruktionen
Inriktning för FMG - del av CIO inriktningar för tjänster i Försvarsmaktens gemensamma informationsinfrastruktur
 Sändlista Sida 1 (5) Ert tjänsteställe, handläggare Ert datum Er beteckning Vårt tjänsteställe, handläggare Vårt föregående datum Vår föregående beteckning Inriktning för FMG - del av CIO inriktningar
Sändlista Sida 1 (5) Ert tjänsteställe, handläggare Ert datum Er beteckning Vårt tjänsteställe, handläggare Vårt föregående datum Vår föregående beteckning Inriktning för FMG - del av CIO inriktningar
Riktiga experter på IR-teknik. Stefan Sjökvist www.termisk.se
 Riktiga experter på IR-teknik Utvecklar och tillhandahåller kvalificerade produkter och tjänster inom IR-teknik och värmeöverföring. Stefan Sjökvist www.termisk.se Agenda Termisk Systemteknik Värmekameror
Riktiga experter på IR-teknik Utvecklar och tillhandahåller kvalificerade produkter och tjänster inom IR-teknik och värmeöverföring. Stefan Sjökvist www.termisk.se Agenda Termisk Systemteknik Värmekameror
adage solutions ADAGE NEREID Handburen Läsare RFID RFID-SYSTEM OCH PRODUKTER TEKNISKA DATA
 står för Radio Frequency Identifi cation och innebär en transponder (tagg). Genom vårt unika -koncept gör vi det på blir därför mycket robusta och fl exibla. Förutom serienumret -SYSTEM OCH PRODUKTER ADAGE
står för Radio Frequency Identifi cation och innebär en transponder (tagg). Genom vårt unika -koncept gör vi det på blir därför mycket robusta och fl exibla. Förutom serienumret -SYSTEM OCH PRODUKTER ADAGE
L 329/2 Europeiska unionens officiella tidning 29.11.2012
 L 329/2 Europeiska unionens officiella tidning 29.11.2012 En galvaniserad artikel bestående av en U-formad bult, gängad i båda ändar, två sexkantiga muttrar och en gjuten stålklämma med två hål för bultens
L 329/2 Europeiska unionens officiella tidning 29.11.2012 En galvaniserad artikel bestående av en U-formad bult, gängad i båda ändar, två sexkantiga muttrar och en gjuten stålklämma med två hål för bultens
Tentamen i Fotonik - 2015-08-21, kl. 08.00-13.00
 Tentamen i Fotonik - 2015-08-21, kl. 08.00-13.00 Tentamen i Fotonik 2011 08 25, kl. 08.00 13.00 FAFF25-2015-08-21 FAFF25 2011 08 25 FAFF25 2011 08 25 FAFF25 FAFF25 - Tentamen Fysik för Fysik C och i för
Tentamen i Fotonik - 2015-08-21, kl. 08.00-13.00 Tentamen i Fotonik 2011 08 25, kl. 08.00 13.00 FAFF25-2015-08-21 FAFF25 2011 08 25 FAFF25 2011 08 25 FAFF25 FAFF25 - Tentamen Fysik för Fysik C och i för
Strilanläggning 15. Selenia i Italien fick 1962 uppdraget att bygga radarn som fick beteckningen PS-15.
 212 Strilradaranläggning 15 Historik Anskaffningen av Strilradaranläggning 15 har sitt ursprung i försöken att med olika metoder (ballong, helikopter, flygplan) få en radar tillräckligt högt placerad för
212 Strilradaranläggning 15 Historik Anskaffningen av Strilradaranläggning 15 har sitt ursprung i försöken att med olika metoder (ballong, helikopter, flygplan) få en radar tillräckligt högt placerad för
FM 2 sändarna ger tillsammans med försvarets kompletteringssändare mycket bra mottagningsförhållanden för LUFOR över hela landet.
 LUFOR-Luftförsvarsorientering Genom luftförsvarsorientering erhålls underrättelser om fiendens flygverksamhet samt om verksamheten hos vårt långsamtgående flyg. Under gynnsamma förhållanden lämnar LUFOR
LUFOR-Luftförsvarsorientering Genom luftförsvarsorientering erhålls underrättelser om fiendens flygverksamhet samt om verksamheten hos vårt långsamtgående flyg. Under gynnsamma förhållanden lämnar LUFOR
e-sense Organic Plug and play
 e-sense Organic e-sense Organic Plug and play e-sense Organic är ett trådlöst styrsystem som utvecklats för arbetsplatser. Alla armaturer har en egen sensor som reagerar på närvaro och dagsljus. Varje
e-sense Organic e-sense Organic Plug and play e-sense Organic är ett trådlöst styrsystem som utvecklats för arbetsplatser. Alla armaturer har en egen sensor som reagerar på närvaro och dagsljus. Varje
Strålsäkerhetsmyndighetens författningssamling
 Strålsäkerhetsmyndighetens författningssamling ISSN: 2000-0987 SSMFS 2014:4 Strålsäkerhetsmyndighetens föreskrifter och allmänna råd om laser, starka laserpekare och intensivt pulserat ljus Konsoliderad
Strålsäkerhetsmyndighetens författningssamling ISSN: 2000-0987 SSMFS 2014:4 Strålsäkerhetsmyndighetens föreskrifter och allmänna råd om laser, starka laserpekare och intensivt pulserat ljus Konsoliderad
WALLENBERGS FYSIKPRIS 2016
 WALLENBERGS FYSIKPRIS 2016 Tävlingsuppgifter (Kvalificeringstävlingen) Riv loss detta blad och häfta ihop det med de lösta tävlingsuppgifterna. Resten av detta uppgiftshäfte får du behålla. Fyll i uppgifterna
WALLENBERGS FYSIKPRIS 2016 Tävlingsuppgifter (Kvalificeringstävlingen) Riv loss detta blad och häfta ihop det med de lösta tävlingsuppgifterna. Resten av detta uppgiftshäfte får du behålla. Fyll i uppgifterna
Bild 1. Katharina Persson och Magnus Eriksson vid Duroc Engineering AB var värdar för Laserdagen som lockade 27 deltagare.
 Laserdag hos Duroc i Luleå - Nya laserkällor och laserytbehandling i fokus av Hans Engström, Luleå tekniska universitet Det var Duroc Enginering AB i Luleå, som uteslutande arbetar med laserytbehandling,
Laserdag hos Duroc i Luleå - Nya laserkällor och laserytbehandling i fokus av Hans Engström, Luleå tekniska universitet Det var Duroc Enginering AB i Luleå, som uteslutande arbetar med laserytbehandling,
OBS: Alla mätningar och beräknade värden ska anges i SI-enheter med korrekt antal värdesiffror. Felanalys behövs endast om det anges i texten.
 Speed of light OBS: Alla mätningar och beräknade värden ska anges i SI-enheter med korrekt antal värdesiffror. Felanalys behövs endast om det anges i texten. 1.0 Inledning Experiment med en laseravståndsmätare
Speed of light OBS: Alla mätningar och beräknade värden ska anges i SI-enheter med korrekt antal värdesiffror. Felanalys behövs endast om det anges i texten. 1.0 Inledning Experiment med en laseravståndsmätare
LEDNINGS- OCH SAMBANDSSYSTEM FV-SYSTEM FRÅN PLOTTBORD TILL FV 2000
 LEDNINGS- OCH SAMBANDSSYSTEM FV-SYSTEM FRÅN PLOTTBORD TILL FV 2000 ERIK HÄGGBLAD FMV: FUNKTION FÖRETRÄDARE LUFT HISTORIA FÖRSTA SYSTEMEN BYGGDE PÅ TALRAPPORTERING OCH PLOTTBORD TELEFONNÄTETS STRUKTUR UTGJORDE
LEDNINGS- OCH SAMBANDSSYSTEM FV-SYSTEM FRÅN PLOTTBORD TILL FV 2000 ERIK HÄGGBLAD FMV: FUNKTION FÖRETRÄDARE LUFT HISTORIA FÖRSTA SYSTEMEN BYGGDE PÅ TALRAPPORTERING OCH PLOTTBORD TELEFONNÄTETS STRUKTUR UTGJORDE
Installations- och bruksanvisning
 EFP Trådlös takmonterad värmevakt med spisvakt 1-fas (E-nr 1340197) Installations- och bruksanvisning Allmänt EFP Trådlös takmonterad värmevakt med spisvakt (E-nr 1340197). Värmevakten monteras i taket
EFP Trådlös takmonterad värmevakt med spisvakt 1-fas (E-nr 1340197) Installations- och bruksanvisning Allmänt EFP Trådlös takmonterad värmevakt med spisvakt (E-nr 1340197). Värmevakten monteras i taket
BILAGA. En handmanövrerad mekanisk apparat för dosering av vätska till en behållare för titreranalys (så kallad digital titreringsapparat).
.") En handmanövrerad mekanisk apparat för dosering av vätska till en behållare för titreranalys (så kallad digital titreringsapparat). Apparaten består av en justerbar mekanisk fördelare med plats för en
En handmanövrerad mekanisk apparat för dosering av vätska till en behållare för titreranalys (så kallad digital titreringsapparat). Apparaten består av en justerbar mekanisk fördelare med plats för en
FMV. Verksamhet och behov på lång sikt Förbandsperspektiv. Håkan, Jan och Gunnar,Tjf Teknisk Chef Marina system
 FMV Verksamhet och behov på lång sikt Förbandsperspektiv Håkan, Jan och Gunnar,Tjf Teknisk Chef Marina system Skillnad mot tidigare En sammanhållen försvarslogistik Försvarsmakten som beställare och
FMV Verksamhet och behov på lång sikt Förbandsperspektiv Håkan, Jan och Gunnar,Tjf Teknisk Chef Marina system Skillnad mot tidigare En sammanhållen försvarslogistik Försvarsmakten som beställare och
Uovision 565 Black. Invisible IR MMS 8MP. GPRS Uovision blev. utsedd till bäst i test i Allt om Jakt och Vapens stora kamera test i NR4
 Uovision 565 Black Invisible IR MMS 8MP GPRS Uovision blev utsedd till bäst i test i Allt om Jakt och Vapens stora kamera test i NR4 Uovision 565 Black Invisible IR MMS 8MP GPRS Uovision blev utsedd till
Uovision 565 Black Invisible IR MMS 8MP GPRS Uovision blev utsedd till bäst i test i Allt om Jakt och Vapens stora kamera test i NR4 Uovision 565 Black Invisible IR MMS 8MP GPRS Uovision blev utsedd till
Trådlös kommunikation En introduktion av Open Systems Engineering AB
 Trådlös kommunikation En introduktion av Open Systems Engineering AB Trådlös Kommunikation Terminologi Trådlös teknologi ; för- och nackdelar Teletekniska lösningar (telefoni) WiFi lösningar Radio, företagsspecifika
Trådlös kommunikation En introduktion av Open Systems Engineering AB Trådlös Kommunikation Terminologi Trådlös teknologi ; för- och nackdelar Teletekniska lösningar (telefoni) WiFi lösningar Radio, företagsspecifika
Tentamen i Fotonik , kl
 FAFF25-2015-03-20 Tentamen i Fotonik - 2015-03-20, kl. 14.00-19.15 FAFF25 - Fysik för C och D, Delkurs i Fotonik Tillåtna hjälpmedel: Miniräknare, godkänd formelsamling (t ex TeFyMa), utdelat formelblad.
FAFF25-2015-03-20 Tentamen i Fotonik - 2015-03-20, kl. 14.00-19.15 FAFF25 - Fysik för C och D, Delkurs i Fotonik Tillåtna hjälpmedel: Miniräknare, godkänd formelsamling (t ex TeFyMa), utdelat formelblad.
Begrepp. Antipersonell mina Avståndsutlagd minering. beredskap.
 Begrepp Spärrning, blockering och förstöring av an- läggningar samt minering och utförande av hinder i terräng. Antipersonell mina Avståndsutlagd minering Beredskap Beredskapsgrad Blockering Fördröjande
Begrepp Spärrning, blockering och förstöring av an- läggningar samt minering och utförande av hinder i terräng. Antipersonell mina Avståndsutlagd minering Beredskap Beredskapsgrad Blockering Fördröjande
Tillämpning av komplext kommunikationssystem i MATLAB
 (Eller: Vilken koppling har Henrik Larsson och Carl Bildt?) 1(5) - Joel Nilsson joelni at kth.se Martin Axelsson maxels at kth.se Sammanfattning Kommunikationssystem används för att överföra information,
(Eller: Vilken koppling har Henrik Larsson och Carl Bildt?) 1(5) - Joel Nilsson joelni at kth.se Martin Axelsson maxels at kth.se Sammanfattning Kommunikationssystem används för att överföra information,
Metoder för rörelsemätning, en översikt.
 Metoder för rörelsemätning, en översikt. Metoder för mätning av rörelser kan delas in i följande grupper: 1. Mekaniska metoder. 2. Elektromagnetiska metoder. 3. Akustiska metoder. 4. Optiska metoder. Nedan
Metoder för rörelsemätning, en översikt. Metoder för mätning av rörelser kan delas in i följande grupper: 1. Mekaniska metoder. 2. Elektromagnetiska metoder. 3. Akustiska metoder. 4. Optiska metoder. Nedan
Omtentamen Meteorologi 2006-01-09 sidan 1 ( 6 ) Chalmers Institutionen för Sjöfart och Marin Teknik
 Chalmers Institutionen för Sjöfart och Marin Teknik") Omtentamen Meteorologi 2006-01-09 sidan 1 ( 6 ) 1. Svara kort men också fullständigt innebörden/betydelsen av följande ord/benämningar och hur de används/betyder inom meteorologin och till sjöss. a Isobar
Omtentamen Meteorologi 2006-01-09 sidan 1 ( 6 ) 1. Svara kort men också fullständigt innebörden/betydelsen av följande ord/benämningar och hur de används/betyder inom meteorologin och till sjöss. a Isobar
MIC Series 550 Tålig pan-tilt-zoom-kamera för utomhusbruk
 MIC Series 550 Tålig pan-tilt-zoom-kamera för utomhusbruk 2 MIC Series 550 Sätter standarden inom övervakning Tilltalande, kompakt design för diskret integrering i övervakningsmiljöer Tålig, vandalsäker
MIC Series 550 Tålig pan-tilt-zoom-kamera för utomhusbruk 2 MIC Series 550 Sätter standarden inom övervakning Tilltalande, kompakt design för diskret integrering i övervakningsmiljöer Tålig, vandalsäker
Volvo Energieffektivt fordon Fas 5 Energimyndighetens konferens Energirelaterad fordonsforskning Åke Othzén
 Volvo Energieffektivt fordon Fas 5 Energimyndighetens konferens Energirelaterad fordonsforskning 2017 Åke Othzén 2017-10-05 Projektinformation Projekttid 2011-2017 Fas 5: 2016-02-03-2017-11-01 Volvo Technology
Volvo Energieffektivt fordon Fas 5 Energimyndighetens konferens Energirelaterad fordonsforskning 2017 Åke Othzén 2017-10-05 Projektinformation Projekttid 2011-2017 Fas 5: 2016-02-03-2017-11-01 Volvo Technology
Samtidig mätning av infraröd- och radaregenskaper Beskrivning av nytt materialmätsystem vid FOI
 Samtidig mätning av infraröd- och radaregenskaper Beskrivning av nytt materialmätsystem vid FOI Jan-Olof Ousbäck, Anna Pohl, Hans Kariis FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet.
Samtidig mätning av infraröd- och radaregenskaper Beskrivning av nytt materialmätsystem vid FOI Jan-Olof Ousbäck, Anna Pohl, Hans Kariis FOI är en huvudsakligen uppdragsfinansierad myndighet under Försvarsdepartementet.
Arboga Robotmuseum Teknisk Underrättelsetjänst 2011-12-21 Antero Timofejeff Sida 1(12)
") Antero Timofejeff Sida 1(12) Föredrag om Teknisk underrättelsetjänst på Arboga Robotmuseum den 29/11 2011. Källa: Jerk Fehling och Antero Timofejeff. Årets sista föredrag på Robotmuseet samlades 25 personer
Antero Timofejeff Sida 1(12) Föredrag om Teknisk underrättelsetjänst på Arboga Robotmuseum den 29/11 2011. Källa: Jerk Fehling och Antero Timofejeff. Årets sista föredrag på Robotmuseet samlades 25 personer
Tentamen i Fotonik - 2014-04-25, kl. 08.00-13.00
 FAFF25-2014-04-25 Tentamen i Fotonik - 2014-04-25, kl. 08.00-13.00 FAFF25 - Fysik för C och D, Delkurs i Fotonik Tillåtna hjälpmedel: Miniräknare, godkänd formelsamling (t ex TeFyMa), utdelat formelblad.
FAFF25-2014-04-25 Tentamen i Fotonik - 2014-04-25, kl. 08.00-13.00 FAFF25 - Fysik för C och D, Delkurs i Fotonik Tillåtna hjälpmedel: Miniräknare, godkänd formelsamling (t ex TeFyMa), utdelat formelblad.
Tentamen i Trådlös Internet-access
 Mittuniversitetet Inst. för IT och medier, ITM Stefan Pettersson 005-08- Tentamen i Trådlös Internet-access Tid: 08.00-13.00. Hjälpmedel: Valfri miniräknare. Bifogad formelsamling. Ansvarig lärare: Stefan
Mittuniversitetet Inst. för IT och medier, ITM Stefan Pettersson 005-08- Tentamen i Trådlös Internet-access Tid: 08.00-13.00. Hjälpmedel: Valfri miniräknare. Bifogad formelsamling. Ansvarig lärare: Stefan
Bildanalys och vision Optik F Mount. F-mount. Tel: , Fax: / 7
 Bildanalys och vision Optik F Mount F-mount www.oemautomatic.se, info@aut.oem.se, Tel: 075-242 41 00, Fax: 075-242 41 19 1 / 7 Översikt F-Mount Med objektiv från Carl Zeiss erbjuder vi högupplöst bildkvalitet
Bildanalys och vision Optik F Mount F-mount www.oemautomatic.se, info@aut.oem.se, Tel: 075-242 41 00, Fax: 075-242 41 19 1 / 7 Översikt F-Mount Med objektiv från Carl Zeiss erbjuder vi högupplöst bildkvalitet
Processinriktning i ISO 9001:2015
 Processinriktning i ISO 9001:2015 Syftet med detta dokument Syftet med detta dokument är att förklara processinriktning i ISO 9001:2015. Processinriktning kan tillämpas på alla organisationer och alla
Processinriktning i ISO 9001:2015 Syftet med detta dokument Syftet med detta dokument är att förklara processinriktning i ISO 9001:2015. Processinriktning kan tillämpas på alla organisationer och alla
Varför djupare V-botten och större motor
 Varför djupare V-botten och större motor Det är ofta mycket stort avstånd mellan tillgänglig kunskap och dess tillämpning i produktion och handel. Det cirkulerar många helt ogrundade slutsatser som kan
Varför djupare V-botten och större motor Det är ofta mycket stort avstånd mellan tillgänglig kunskap och dess tillämpning i produktion och handel. Det cirkulerar många helt ogrundade slutsatser som kan
Dental digital röntgenteknik Vad ska vi tänka på?
 Odontologiska fakulteten, Tandvårdshögskolan Malmö Dental digital röntgenteknik Vad ska vi tänka på? Kristina Hellén-Halme Avdelningen för Odontologisk röntgendiagnostik, Malmö högskola 1 Skillnad mellan
Odontologiska fakulteten, Tandvårdshögskolan Malmö Dental digital röntgenteknik Vad ska vi tänka på? Kristina Hellén-Halme Avdelningen för Odontologisk röntgendiagnostik, Malmö högskola 1 Skillnad mellan
Kommittédirektiv. Forskning och utveckling på försvarsområdet. Dir. 2015:103. Beslut vid regeringssammanträde den 29 oktober 2015
 Kommittédirektiv Forskning och utveckling på försvarsområdet Dir. 2015:103 Beslut vid regeringssammanträde den 29 oktober 2015 Sammanfattning En särskild utredare ska lämna förslag till inriktningen, omfattningen
Kommittédirektiv Forskning och utveckling på försvarsområdet Dir. 2015:103 Beslut vid regeringssammanträde den 29 oktober 2015 Sammanfattning En särskild utredare ska lämna förslag till inriktningen, omfattningen
FÖRSVARSMAKTENS INTERNA BESTÄMMELSER
 FÖRSVARSMAKTENS INTERNA BESTÄMMELSER FIB 2010:2 Utkom från trycket 2010-01-21 Omtryck Föreskrifter om ändring i Försvarsmaktens interna bestämmelser (FIB 2006:2) om IT-säkerhet; beslutade den 15 januari
FÖRSVARSMAKTENS INTERNA BESTÄMMELSER FIB 2010:2 Utkom från trycket 2010-01-21 Omtryck Föreskrifter om ändring i Försvarsmaktens interna bestämmelser (FIB 2006:2) om IT-säkerhet; beslutade den 15 januari
Torbjörn Westin, Spacemetric AB Simon Ahlberg, FORAN Remote Sensing AB
 Torbjörn Westin, Spacemetric AB Simon Ahlberg, FORAN Remote Sensing AB Introduktion Korta företagspresentationer Motiv och bakgrund Bilder, ljusberoende Frikoppla laserdata från bilder Metod Laserdata,
Torbjörn Westin, Spacemetric AB Simon Ahlberg, FORAN Remote Sensing AB Introduktion Korta företagspresentationer Motiv och bakgrund Bilder, ljusberoende Frikoppla laserdata från bilder Metod Laserdata,
Serie 300. Datablad SDF00055SE Version 1.3 12/11/2013. Konventionella optiska rök- och värmedetektorer. Serie 300
 SDF00055SE Version 1.3 12/11/2013 Serie 300 Konventionella optiska rök- och värmedetektorer ED2351E Serie 300 Serie 300 Branddetektorer från Schneider-Electric har egenskaper och funktioner som tidigare
SDF00055SE Version 1.3 12/11/2013 Serie 300 Konventionella optiska rök- och värmedetektorer ED2351E Serie 300 Serie 300 Branddetektorer från Schneider-Electric har egenskaper och funktioner som tidigare
Optik. Läran om ljuset
 Optik Läran om ljuset Vad är ljus? Ljus är en form av energi. Ljus är elektromagnetisk strålning. Energi kan inte försvinna eller nyskapas. Ljuskälla Föremål som skickar ut ljus. I alla ljuskällor sker
Optik Läran om ljuset Vad är ljus? Ljus är en form av energi. Ljus är elektromagnetisk strålning. Energi kan inte försvinna eller nyskapas. Ljuskälla Föremål som skickar ut ljus. I alla ljuskällor sker
Hur studera ledning? Systemteori Ledningsprocesser Designlogik
 DOODA Hur studera ledning? Systemteori Ledningsprocesser Designlogik Ett ledningssystem är så komplext att vi inte kan studera systemet som helhet Olika metoder för olika syften Vi kommer idag endast prata
DOODA Hur studera ledning? Systemteori Ledningsprocesser Designlogik Ett ledningssystem är så komplext att vi inte kan studera systemet som helhet Olika metoder för olika syften Vi kommer idag endast prata
LIPs Daniel Axehill ChrKr Projektdirektiv_Saab_v3 CKr
 Daniel Axehill 2006-01-19 Sida 1 Projektnamn Beställare Daniel Axehill, ISY Projektledare Student Projektbeslut Torbjörn Crona, Daniel Axehill Projekttid Läsperiod 3-4, vårterminen 2006. Projektet klart
Daniel Axehill 2006-01-19 Sida 1 Projektnamn Beställare Daniel Axehill, ISY Projektledare Student Projektbeslut Torbjörn Crona, Daniel Axehill Projekttid Läsperiod 3-4, vårterminen 2006. Projektet klart
Laserkommunikation för spridning av VMS-data inom fartygsförband
 Laserkommunikation för spridning av VMS-data inom fartygsförband Per Sakari, Magnus Pettersson FOI-R--1718--SE ISSN 165-1942 Ledningssystem Användarrapport September 25 FOI är en huvudsakligen uppdragsfinansierad
Laserkommunikation för spridning av VMS-data inom fartygsförband Per Sakari, Magnus Pettersson FOI-R--1718--SE ISSN 165-1942 Ledningssystem Användarrapport September 25 FOI är en huvudsakligen uppdragsfinansierad
Automatiserad Utsättning och Upptagning av Sidomarkeringsskärmar. Förstudie
 Automatiserad Utsättning och Upptagning av Sidomarkeringsskärmar Förstudie Förord Arbete på vägarna innebär stora säkerhetsrisker för personalen som utför vägarbete. Enligt Trafikverket har 1723 trafikolyckor
Automatiserad Utsättning och Upptagning av Sidomarkeringsskärmar Förstudie Förord Arbete på vägarna innebär stora säkerhetsrisker för personalen som utför vägarbete. Enligt Trafikverket har 1723 trafikolyckor
Luftburna kommunikationsnoder
 Luftburna kommunikationsnoder i marknät SARA ÖRN TENGSTRAND Scenarioanalys mobilt kärnnät FOI-R--3861--SE ISSN 1650-1942 Februari 2014 Sara Örn Tengstrand Luftburna kommunikationsnoder i marknät Scenarioanalys
Luftburna kommunikationsnoder i marknät SARA ÖRN TENGSTRAND Scenarioanalys mobilt kärnnät FOI-R--3861--SE ISSN 1650-1942 Februari 2014 Sara Örn Tengstrand Luftburna kommunikationsnoder i marknät Scenarioanalys
4.2 Fastställ en referenslösning... 6 4.2.1 Kundvärde... 6
 Inlämning 4 IKOT Inlämningsuppgift 4 Anders Segerlund andseg@student.chalmers.se Joakim Larsson joakiml@student.chalmers.se Toni Hastenpflug tonih@student.chalmers.se Fredrik Danielsson fredani@student.chalmers.se
Inlämning 4 IKOT Inlämningsuppgift 4 Anders Segerlund andseg@student.chalmers.se Joakim Larsson joakiml@student.chalmers.se Toni Hastenpflug tonih@student.chalmers.se Fredrik Danielsson fredani@student.chalmers.se
BESLUTSSTÖD. Innehåll 1. INLEDNING. EXAMENSRAPPORT MILITÄRA LEDNINGSSYSTEM Jan Nyberg December 1997. 1.1 Bakgrund
 BESLUTSSTÖD Innehåll 1. INLEDNING...1 2. INFORMATION OCH DESS BEHANDLANDE I ETT BESLUTSSTÖD...2 3. SAMMANFATTNING...4 REFERENSER:...5 1. INLEDNING 1.1 Bakgrund Jag har valt att behandla hur vi kan gå tillväga
BESLUTSSTÖD Innehåll 1. INLEDNING...1 2. INFORMATION OCH DESS BEHANDLANDE I ETT BESLUTSSTÖD...2 3. SAMMANFATTNING...4 REFERENSER:...5 1. INLEDNING 1.1 Bakgrund Jag har valt att behandla hur vi kan gå tillväga
Teknisk presentation av VDL Mode 4 för allmänflyg
 Teknisk presentation av VDL Mode 4 för allmänflyg EGOA Enhanced General Aviation Operation by ADS-B Disposition Tjänster ADS-B FIS-B Datalänk VDL Mode 4 Utrustning Transponder/Com-radio Cockpitdisplay
Teknisk presentation av VDL Mode 4 för allmänflyg EGOA Enhanced General Aviation Operation by ADS-B Disposition Tjänster ADS-B FIS-B Datalänk VDL Mode 4 Utrustning Transponder/Com-radio Cockpitdisplay
Profilen Kommunikation för Y, Yi, D & IT
 Profilen Kommunikation för Y, Yi, D & IT Profilansvarig: Emil Björnson Docent, ISY/Kommunikationssystem www.commsys.isy.liu.se Profilansvarig: Emil Björnson Civilingenjör i Teknisk matematik, LTH, 2007
Profilen Kommunikation för Y, Yi, D & IT Profilansvarig: Emil Björnson Docent, ISY/Kommunikationssystem www.commsys.isy.liu.se Profilansvarig: Emil Björnson Civilingenjör i Teknisk matematik, LTH, 2007
UPONOR VVS GOLVVÄRME UPONOR CONTROL SYSTEM. Uponor Control System DEM Ökad komfort och mindre energiförbrukning
 UPONOR VVS GOLVVÄRME UPONOR CONTROL SYSTEM Uponor Control System DEM Ökad komfort och mindre energiförbrukning 5070 09 2009 Uponor Control System Radio Dynamic Energy Management (DEM) Uponor Control System
UPONOR VVS GOLVVÄRME UPONOR CONTROL SYSTEM Uponor Control System DEM Ökad komfort och mindre energiförbrukning 5070 09 2009 Uponor Control System Radio Dynamic Energy Management (DEM) Uponor Control System