HMK. Kontroll av läges- osäkerheten i laserdata. Teknisk rapport 2014:1. Clas-Göran Persson, Helén Rost & Thomas Lithén. handbok i mät- och kartfrågor
|
|
|
- Ulf Vikström
- för 8 år sedan
- Visningar:
Transkript
1 HMK handbok i mät- och kartfrågor Teknisk rapport 2014:1 Kontroll av läges- osäkerheten i laserdata Clas-Göran Persson, Helén Rost & Thomas Lithén
2
3 Sammanfattning Denna PM innehåller en analys av lägesosäkerheten i laserdata. Den avser primärt osäkerheten i höjd, som ter sig särskilt viktig i samband med digitala höjdmodeller etc. Behandlingen av lägesosäkerheten i plan är mer pragmatisk. Innehållet har stämts av mot den norska produktspecifikationen Produktspesifikasjon, Nasjonal modell for høydedata fra laserskanning (FKB-Laser) men avviker något från denna. Argumenten för att delvis gå en egen väg redovisas. Analysen kompletteras med en simuleringsstudie och en empirisk studie av den hittillsvarande produktionen av den nya nationella höjdmodellen. PM:en ingår i skriftserien Tekniska Rapporter inom arbetet med HMK (Handbok i mät- och kartfrågor). Där publiceras successivt analyser, bakgrundsfakta, referensmaterial etc., vilket förhoppningsvis ökar förståelsen och gör det möjligt att gå mer rakt på sak i de regelrätta handbokstexterna. Key words: laser data, uncertainty in measurement. Författarnas kontaktuppgifter Clas-Göran Persson Kungliga Tekniska Högskolan (KTH) Drottning Kristinas väg 30 SE Stockholm och Lantmäteriet SE Gävle clas-goran.persson@lm.se Helen Rost Blom Sweden AB Hammarbacken 6B SE Sollentuna helen.rost@blomasa.com Thomas Lithén Lantmäteriet SE Gävle thomas.lithen@lm.se HMK Teknisk rapport 2014:1 3 (27)
4 Innehållsförteckning 1 Introduktion Norska produktspecifikationen för höjddata från laserskanning Analys... 9 Kontrollens placering i produktionsprocessen... 9 Signifikans... 9 Lägesosäkerhet i höjd: Standardavvikelse, skift, RMS Off-set i plan Toleranser GNSS/RTK som inmätningsmetod för stöd- och kontrollpunkter Förslag Text till HMK-Laserdata 2014, avsnitt 2.3.3: Lägesosäkerhet Kompletterande text till HMK-Laserdata 2014, avsnitt 3.2: Signalering och inmätning av markstöd Justerad och delvis ny text i HMK-Laserdata 2014, bilaga A.3.2: Produkt och metadata Referenser Bilaga: Lägesosäkerheten i NNH Projektvisa RMS i plan och höjd Relationen mellan RMS i plan och höjd Skift i höjd per projekt Totalt RMS vs. individuella RMS-värden en simuleringsstudie Sammanfattning toleranser/gränsvärden HMK Teknisk rapport 2014:1 4 (27)
5 1 Introduktion Denna PM innehåller en analys av lägesosäkerheten i laserdata. Den avser primärt osäkerheten i höjd, som ter sig särskilt viktig i samband med digitala höjdmodeller etc. Behandlingen av lägesosäkerheten i plan är mer pragmatisk. Inom fotogrammetrin används terrestert inmätta stödpunkter för den absoluta orienteringen av flygbilder/stereomodeller och kontrollpunkter för att säkerställa att denna anpassning till aktuellt referenssystem gäller för hela projektområdet, även mellan stödpunkterna. Vid laserskanning baseras stödet/kontrollen i stället på punktsvärmar av terrestert inmätta punkter. I höjd placeras dessa i form av tämligen regelbundna punktgitter på plana, hårdgjorda ytor (se Figur 1 samt Exempel 1). De benämns stödytor eller kontrollytor. 6 Stödyta i höjd 4 2 meter meter Figur 1. Exempel på en stödyta i höjd för den nationella höjdmodellen. För stöd/kontroll i plan används i stället stödobjekt eller kontrollobjekt som har en tydlig tre-dimensionell relief, t.ex. diken och hustak. I båda fallen görs en jämförelse mellan dessa ytor/objekt och motsvarande delar i laserdata en matchning för vilken det finns flera olika metoder. Avvikelserna utgör sedan underlag för den fortsatta hanteringen. I de fall vi samtidigt behöver referera till stödytor och stödobjekt eller kontrollytor och kontrollobjekt återgår vi för enkelhets skull till de etablerade termerna stödpunkter respektive kontrollpunkter; ytor och objekt byggs ju trots allt upp av just punkter. HMK Teknisk rapport 2014:1 5 (27)
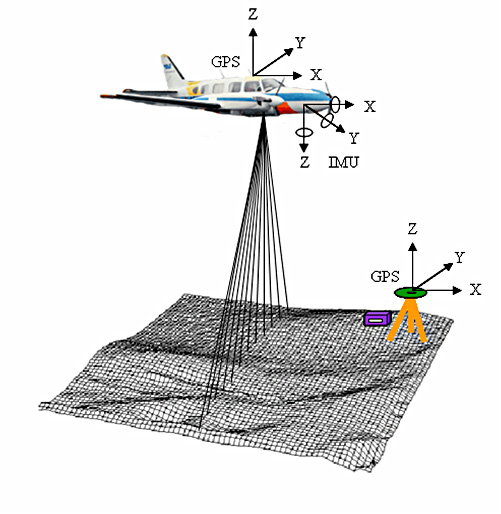
6 Det finns två dominerande, geometriska felkällor i laserdata: brus och georeferering. Georefereringen sker med GNSS/INS och förbättras med stråkutjämning och inpassning mot stöd. Det finns i princip två sätt utvärdera lägesosäkerheten i laserdata: 1. Jämförelse mot kända kontrollpunkter, se Figur Analys av stråköverlapp (oftast efter stråkutjämning), se Figur 3. Figur 2. Laserdata i tvärsnitt utgörs av den blå taggiga linjen. Gränsvärdena representeras av de raka strecken. Röda trianglar är stödpunkter för inpassning, gula trianglar kontrollpunkter för utvärdering. Taggigheten i figur 2 avspeglar bruset i data. Att linjen böljar upp och ner har flera orsaker, men beror främst på driften i GNSS/INS. Figur 3. Tvärsnitt över laserstråk i olika färger med överlapp. Gliporna mellan de olikfärgade stråken härrör från fel i georefereringen. Inom varje stråk syns bruset i laserdata som en spridning av punktsvärmen. I detta exempel ligger bruset inom ett stråk på ca 0.03 m och avståndet mellan stråken på ca 0.05 m. I Figur 3 visas verkliga data. Bruset syns som en spridning av laserpunktsvärmen inom varje stråk och positioneringsfelen syns som en off-set i höjd mellan stråken. En del av de systematiska felen i GNSS-/tröghetsmätningarna modelleras och korrigeras för vid en stråkutjämning, men det kommer alltid att finnas en del av dessa fel kvar i slutprodukten. Det betyder att väntevärdet inte alltid ligger på noll i kontrollpunkterna, se Figur 4. HMK Teknisk rapport 2014:1 6 (27)
7 Normalfördelning Verklig fördelning Figur 4. Normalfördelning vs. verklig fördelning för laserdata. Det innebär i sin tur att en strikt hantering enligt normalfördelningen inte låter sig göras, utan det blir nödvändigt med mer förnufts- och erfarenhetsmässiga toleransnivåer. I Sverige sker vanligen ingen specificering av brus-nivån i produkten från beställarens sida. Om en kund ber om laserdata specificeras snarast att avvikelserna i kontrollpunkterna ska ligga under en viss nivå. I den norska specifikationen för höjddata från laserskanning (se nästa kapitel) finns dock en sådan reglering. Utgångspunkten för oss är denna specifikation samt den hypotes som tagits fram i arbetet med remissversionen av HMK-Laserdata 2014, se utdrag i Tabell 1. Parametrar Standardosäkerhet i höjd på plana och väldefinierade ytor (mm) Standardosäkerhet i plan på väldefinierade objekt (mm) Tabell 1. Standardosäkerhet per standardnivå för luftburen laserskanning. (Remissversionen av HMK-Laserdata 2014.) Tabell 1 ska alltså ses som en startpunkt för vår analys, som vi håller fast vid om inget nytt kommer fram. HMK Teknisk rapport 2014:1 7 (27)
8 2 Norska produktspecifikationen för höjddata från laserskanning Ett utdrag ur Produktspesifikasjon, Nasjonal modell for høydedata fra laserskanning (FKB-Laser) redovisas nedan. Vad gäller mätosäkerhet regleras - lägesosäkerhet i höjd, som standardavvikelse och systematisk avvikelse (skift) - lägesosäkerhet i plan, som systematisk avvikelse (off-set). Merknader: (0) Tallet referer til harde veldefinerte flater, for eksempel veg eller parkeringsplass. I områder med vegetasjon på terrengoverflaten kan stedfestingsnøyaktigheten være noe dårligere. (1) Laserdataene skal ha en jevn og homogen stedfestingsnøyaktighet i høyde. Kvalitetsmålet for høydenøyaktighet er systematisk avvik. Ved kontroll av høydenøyaktigheten skal man benytte kontrollflater som ligger jevnt utover prosjektområdet. Kontrollflatene kan for eksempel være på 20*20 meter og skal ligge på harde, veldefinerte horisontale flater (maks helling 10 %), for eksempel veg eller parkeringsplass. (2) Laserdataene skal ha en jevn og homogen stedfestingsnøyaktighet i grunnriss. Kvalitetsmålet for grunnrissnøyaktighet er systematisk avvik. Kravet er basert på erfaringer fra Sverige der har man erfart at grunnrissnøyaktigheten er 3 ganger dårligere enn høydenøyaktigheten. Dette lar seg lettest måle i knekklinjer som for eksempel mønelinjer og takkanter. (3) Innen enhver 1 km x1 km rute, skal ikke mer enn 2 prosent av punktene være feilklassifisert. - Kravet til korrekt klassifisering gjelder for alle klasser - Eksempel: Innenfor enhver 1km x 1km rute kan maksimalt 2 % av støy-punktene (klasse 7) være feilklassifisert, hvor prosenten beregnes ut i fra korrekt antall støypunkt. HMK Teknisk rapport 2014:1 8 (27)
9 3 Analys Kontrollens placering i produktionsprocessen - HMK-toleranserna avser kontroll av levererad slutprodukt, efter stråkutjämning och inpassning i givet referenssystem med hjälp av stödpunkter i plan och höjd. Hanteringen av stödpunkterna varierar mellan olika utförare. Det gör det svårt att hitta något annat sätt att styra på än genom kontroll av slutprodukten. Dessutom finns det som redan beskrivits andra sätt att staga upp modellen, t.ex. jämförelser mellan överlappande stråk och jämförelser mellan enskilda stråk och medelvärdet över projektområdet. När uppstagningen väl är gjord spelar de ursprungliga differenserna mindre roll. - Utföraren förväntas dock ha ett eget kvalitetssystem som kontrollerar de initiala avvikelserna i stödpunkterna, och dessas fortsatta hantering. Men detta betraktas som en del av produktionsprocessen. Signifikans En kontroll- eller stödpunkt kan vara inmätt med olika metoder. Varje mätmetod har olika felkällor, som bidrar till avvikelserna mellan dessa punkter och laserdata. - I HMK förordas att kontrollmetodens standardosäkerhet ska vara max 1/3 av den standardosäkerhet som specificerats för laserdata. 0.1 GNSS observations 0.08 Deviations from mean [m] Observation # Figur 5. Variationer i positioner från nätverks-rtk över tiden. En vanlig inmätningsmetod är nätverks-rtk. Den metodens standardosäkerhet brukar anges som 15 mm i plan och ca. 25 mm i höjd. Men den angivelsen ska ses över tiden för korta tidsintervall kan variationerna te sig systematiska, se Figur 5. HMK Teknisk rapport 2014:1 9 (27)
10 Eftersom inmätningen av stöd-/kontrollpunkter genomförs förhållandevis snabbt kan man alltså få en närmast systematisk avvikelse. En annan kvalitetsaspekt är punktkonfigurationen. Vissa konfigurationer påverkas mycket av bruset i laserdata, andra påverkas mycket av informationsinnehållet (eller möjligheten att hitta stödet- /kontrollen). Exempel 1: Stöd- och kontrollytor i höjd utformas (som redan nämnts) med hjälp av ett antal punkter som representerar en plan, öppen yta t.ex. 6x6 punkter i ett rutnät, se Figur 1. Punkterna ska ligga så långt ifrån varandra att nya laserpunkter utnyttjas i jämförelsen med varje rutnätspunkt. Ofta tillämpas triangulering som interpolationsmetod och då kommer de tre närmaste laserpunkterna att användas för att interpolera fram en höjd i laserdata för just den rutnätspunkten. Se Figur 6. Figur 6. Interpolation av ett höjdvärde görs med hjälp av triangulering utifrån laserpunkterna. RMS(dH)-värdet kommer att påverkas av bruset i laserdata när denna trianguleringsmetod används. Om man istället beräknar ett planets ekvation från en stor mängd laserpunkter, och använder detta plan för jämförelse, så kommer t.ex. ett RMS-värde inte att påverkas i lika hög grad av bruset i laserdata. Bruset filtreras nämligen till stor del bort i minstakvadratanpassningen av planet. Den senare metoden kräver dock en mycket mer avancerad hantering av data och dessutom ett stort antal beslut som, i viss mån, bör grundas på vetskapen om stöd-/kontrollytans egenskaper. Oftast har man ju inte en helt plan yta utan en böljande yta som varierar i skiftande grad. Sammantaget ter det sig lämpligast att använda RMS som kriterium för avvikelsen. Den storheten innehåller både bruset och ett ev. systematiskt skift utan att gradera vilket som dominerar. Totaleffekten är mest intressant eftersom orsaken till avvikelsen kan variera; den kan bero på laserdata, terrestra data, matchningsmetoden eller mest realistiskt kombinationer av dessa felkällor. HMK Teknisk rapport 2014:1 10 (27)
11 Lägesosäkerhet i höjd: Standardavvikelse, skift, RMS Sammantaget och mer stringent matematiskt får vi: - Standardavvikelsen s (i höjd, inom kontrollytan) avspeglar bruset i markklassade punkter med ett visst tillskott av GNSS/INS-fel, eftersom ytorna ibland kommer från fler än ett stråk. - Medelavvikelsen x (kontrollytans genomsnittliga skift) avspeglar framför allt driften i GNSS/INS. - RMS-värdet avspeglar totaleffekten av brus och drift inom kontrollytan. Följande samband gäller: (n 1) RMS 2 n = s 2 (n 1 ) + x 2 n RMS 2 = s 2 + x 2 n dvs. approximativt, för någorlunda stora n (antalet punkter i ytan) RMS = s + x RMS-värdet innefattar alltså både medelskift och brus. Man kan ha noll i brus och ett tydligt skift, och få samma RMS som när man har ett högt brus och litet medelskift. - Denna härledning stärker vårt tidigare val av RMS som kvalitetsmått vid kontroll av laserdata i höjdled. Exempel 2: Anta att standardosäkerheten är satt till 100 mm i höjd A 100 mm brus och 50 mm i skift ger RMS-värdet ca 110 mm och medelavvikelsen 50 mm. B 70 mm brus och 70 mm i skift ger RMS-värdet ca 100 mm och medelavvikelsen 70 mm. C 90 mm brus och 30 mm i skift ger RMS-värdet ca 95 mm och medelavvikelsen 30 mm. D 40 mm brus och 80 mm i skift ger RMS-värdet ca 90 mm och medelavvikelsen 80 mm. Om RMS-gränsen är satt till t.ex. 100 mm skulle B, C och D vara OK. Om man också satte en gräns på medelavvikelsen (skiftet) på, säg, 50 mm skulle endast C vara OK. Stödytorna (passpunkterna) är delvis korrelerade med stråkutjämningen, och kan därför ge en för låg skattning av lägesosäkerheten. Men de måste placeras ganska regelbundet inom projektarean, vilket innebär att de inte alltid blir helt idealiska till sin utformning. Å andra sidan kan de oberoende kontrollytorna väljas mer fritt, med en mer ändamålsenlig placering och utformning. Så i båda fallen blir kanske resultatet vad gäller lägesosäkerheten väl optimistiskt, särskilt som det normalt avser plana, hårdgjorda ytor. Men de bör kunna regleras med samma tolerans. HMK Teknisk rapport 2014:1 11 (27)
12 Den norska specifikationen i kapitel 2 reglerar både standardavvikelse och skift. Totaleffekten, uttryckt i RMS, redovisas i Tabell 2. Deras sätt att ställa krav på skiftet blir alltså även det ungefär samma sak som att ställa krav på RMS. Tabell 2. Totaleffekten uttryckt i RMS av att reglera standardavvikelse och skift var för sig. Jfr. tabellen i kapitel 2. Enhet: mm. Laser 10 Laser 20 Laser 50 Standardavvikelse Skift RMS Off-set i plan Det är alltid svårare att hitta stöd- och kontrollpunkter för laserdata i plan än i höjd, speciellt för höga flyghöjder. Om det inte finns några skarpa objekt så är det även svårt att utvärdera mätosäkerheten i plan. Det är som att matcha två diffusa digitala bilder och ändå få sub-pixel-precision i matchningen. I plan blir det mer fråga om att hitta en referenspunkt, medan det i höjd blir en slags medelvärdesbildning utifrån flera punkter. Exempel 3: Ett stöd- eller kontrollobjekt i plan representeras av en taknock, se Figur 7. I detta fall kan taknocken modelleras i laserdata genom att hitta två plan i punktsvärmen på ett sadeltak och sedan beräkna planens skärningslinje. Då används en mängd laserpunkter för bestämning av planens ekvation. Beroende på antalet punkter, bruset i punkterna och takytans lutning så har bestämningen av taknockens läge i laserdata en viss osäkerhet. Figur 7. Laserpunkter klassade som hus för identifiering av kontrollobjekt i plan. HMK Teknisk rapport 2014:1 12 (27)
13 Om många laserpunkter använts för bestämning av tak-planen så kommer RMS-värdena (beräknade ur de, dn, dh) inte att påverkas nämnvärt av bruset i laserdata. Exempel 4: Ett stöd- eller kontrollobjekt i plan representeras av en terrängprofil. Här påverkas resultatet av jämförelsen mellan laserdata och stödeller kontrollobjektet mycket av profilens form. En profil i flack terräng ger mycket större osäkerhet än en i varierande terräng. Terrängvariationerna måste också matcha punkttätheten så att de inte är för små för att fångas upp i laserdata. En uppmätt off-set (dh, dn, dh) påverkas här av informationsinnehållet i profilen. Om terrängprofilen är tillräckligt lång påverkas resultatet inte av bruset i laserdata. - Ett mer realistiskt mått på avvikelsen i plan är därför off-set, dvs. den radiella avvikelsen för respektive objekt. - Tidiga empiriska resultat har pekat mot att standardosäkerheten för off-set i plan bör sättas ca 3 gånger standardosäkerheten (RMS) i höjd. Detsamma gäller därför för motsvarande toleranser. I bilagan till denna rapport analyseras lägesosäkerheten i drygt 300 projekt från produktionen av den nationella höjdmodellen (f.d. NNH). Denna analys indikerar att för den upplösning som där tillämpas, ungefär 1 så ligger kvoten mellan standardosäkerheterna i plan och höjd snarare på ungefär 5. Trafikverket har och andra sidan en tradition att inom deras primära tillämpningsområde, 3 använda en plantolerans som är 2 gånger höjdtoleransen. Summa summarum så är en rimlig slutsats att: - standardosäkerheten i plan är större än standardosäkerheten i höjd - förhållandet/kvoten ligger i intervallet 2-5, beroende på standardnivå. Ytterligare studier krävs för att bekräfta att kvoten ökar med minskad upplösning, och att den alltså inte är konstant. Detta antagande ter sig ändå rätt rimligt också om man betänker att brusnivån avseende höjdkomponenten inte ökar nämnvärt med flyghöjden liksom felen i GNSS-lösningen. Däremot ökar effekten av ett fel i tröghetsmätningen linjärt med flyghöjden, och är antagligen det största bidraget till planfel i laserpunktmolnet. Det blir också svårare och svårare att urskilja objekt i punktmolnet ju färre laserpunkter det finns, dvs. från högre flyghöjd. HMK Teknisk rapport 2014:1 13 (27)
14 Alltför hårda toleranser i detta fall alltför liten faktor ökar risken att felaktigt förkasta ett projekt som egentligen har en kvalitet som uppfyller specificerade krav ( fel av första slaget vid hypotesprövning). Toleranser Sammantaget bedömer vi - att den nationella höjdmodellen håller en högre kvalitet i höjd än vad som rimligen krävs inom standardnivå 1 - att vi därför ligger kvar med standardosäkerheten 100 mm och faktorn 3 mellan plan och höjd i standardnivå 1 (se Tabell 1) - att vi tillämpar faktorn 3 även i standardnivå 2, men anpassar oss något till Trafikverkets normer och sätter denna faktor till 2,5 för standardnivå 3. De matematiska förhållandena mellan standardosäkerheterna och toleranserna, i plan och höjd, i Tabell 5 bedöms dock vara generellt tillämpbara. Det ger de förhållanden som redovisas i Tabell 3. Tabell 3. Förslag till gränsvärden/toleranser för genomsnittliga och enskilda RMS i förhållande till projektets specificerade standardosäkerhet. Specificerad standardosäkerhet står på första raden, jfr. Tabell 1. Tumregeln för genomsnittligt RMS ges av rad 2 och en tumregel för toleransen för enskilda RMS av rad 3. Höjd (mm) Plan (mm) Slutproduktens standardosäkerhet Gränsvärde, genomsnittliga RMS i kontroll-/stödpunkter för hela projektet (tumregel) Tolerans, enskilda RMS i kontroll- /stödpunkter (tumregel) Relationerna mellan de olika storheterna i tabellen framgår tydligare av förslaget i kapitel 4, där de anges explicit i Tabell A.3.2 (enligt beteckningen i HMK-Laserdata 2014). HMK Teknisk rapport 2014:1 14 (27)
15 GNSS/RTK som inmätningsmetod för stöd- och kontrollpunkter Nätverks-RTK mot SWEPOS är den mest rationella metoden för att mäta in stöd- och kontrollpunkter vid laserskanning. Men med den låga mätosäkerhet som laserskanning ger i dag så börjar vi nu närma oss gränsen för vad denna GNSS-teknik klarar av, åtminstone i höjd. Så det är höjdkomponenten som är viktigast att analysera. Målsättningen är att kontrollmetodens standardosäkerhet är 1/3 av laserskanningens standardosäkerhet. I standardnivå 1 är laserskanningens antagna standardosäkerhet på 100 mm i höjd är ungefär 3 gånger nätverks-rtk-teknikens värde på mm (se HMK-ReGe, Bilaga B.1). Dvs. precis på gränsen. Hur blir det då vid laserskanning i standardnivåerna 2 och 3, när vi kommer ned på ungefär samma mätosäkerhetsnivå som nätverks- RTK mot SWEPOS ger i sin vanligaste tappning? Här finns flera alternativ som sänker mätosäkerheten: - Mäta in flera punkter i varje stöd-/kontrollyta på samma sätt som i det nationella höjdmodellsprojektet. Det kan fungera i standardnivå 2, men Nätverks-RTK mot SWEPOS är inte lämplig för standardnivå 3. Där får man i stället överväga att - gå över till projektanpassad nätverks-rtk (se HMK-ReGe 2013 avsnitt samt Bilaga B.1); det ger ungefär en halvering av standardosäkerheten i höjd - tillämpa RUFRIS (se HMK-ReGe 2013 avsnitt 2.3 samt Bilaga B.1); det sänker standardosäkerheten ytterligare, ned mot några millimeter, om systemet dessutom är projektanpassat. En alternativ åtgärd är naturligtvis att byta till en annan inmätningsmetod, t.ex. precisionsavvägning som är ytterst noggrann men inte särskilt kostnadseffektiv. Dessutom måste då planläget bestämmas på något annat sätt i alla fall. En empirisk studie av de olika alternativen vore önskvärd för att kunna ge tydligare råd beträffande kontrollmätning i dessa sammanhang. Här behövs sannolikt precisionsavvägning som facit. HMK Teknisk rapport 2014:1 15 (27)
16 4 Förslag I detta kapitel redovisas de delar från denna studie som föreslås ingå i HMK-Laserdata OBS: Hänvisningar, avsnitts- och figur-/tabellnummer avser beteckningar i HMK-Laserdata Föreliggande tekniska rapport har där benämningen referens [3]. Text till HMK-Laserdata 2014, avsnitt 2.3.3: Lägesosäkerhet Rekommendation a) Beställaren ställer krav på lägesosäkerhet Krav på lägesosäkerhet avser standardosäkerhet i höjd och plan för öppna plana hårdgjorda ytor respektive tydligt identifierbara objekt mätta i punktmolnet efter stråkutjämning och inpassning på stöd. Observera att standardosäkerheten i höjd kan bli avsevärt högre på andra typer av ytor, exempelvis lutande ytor och ytor med vegetation. Läs mer i referens [1] och [2] för att få en uppskattning av vilken standardosäkerhet i höjd som kan förväntas utanför öppna plana hårdgjorda ytor. Krav på lägesosäkerhet ställs utifrån kraven för användningen av den beställda produkten. Följande tumregler gäller för standardnivå 1, 2 respektive 3: - Krav på standardosäkerheten i höjd bör inte överstiga 100, 50 respektive 20 mm på öppna plana hårdgjorda ytor. - Krav på standardosäkerheten i plan bör inte överstiga standardosäkerheten i höjd med mer än en faktor 2-3 beroende på standardnivå. Det är möjligt att uppnå en lägre standardosäkerhet i höjd än tumreglerna ovan. Vid hårda krav på standardosäkerheten i höjd för standardnivå 1 och 2 kan faktorn för standardosäkerhet i plan behöva höjas upp till 5, läs mer i referens [3] <detta dokument>. Hårdare krav på standardosäkerheten i höjd påverkar kravställningen på stödpunkter, efterbearbetning med mera liksom kostnaden för uppdraget. Laser- och bilddatainsamling kan göras vid samma insamlingstillfälle för att erhålla låg lägesosäkerhet i både plan och höjd samtidigt. Än så länge är detta vanligast för standardnivå 3. Det förekommer också, exempelvis vid inventering, höga krav på tolkbarhet medan lägesosäkerheten är mindre viktig. I sådana fall kan kraven på lägesosäkerhet minskas jämfört med tumreglerna. HMK Teknisk rapport 2014:1 16 (27)
17 Kompletterande text till HMK-Laserdata 2014, avsnitt 3.2: Signalering och inmätning av markstöd Med den låga mätosäkerhet som laserskanning ger i dag börjar vi närma oss gränsen för vad Nätverks-RTK mot SWEPOS klarar av i höjd för standardnivå 1 och 2, om målsättningen är att kontrollmetodens standardosäkerhet är 1/3 av laserskanningens. Standardosäkerheten i bestämningen av ytan minskar med antalet kontrollpunkter även om det finns en korrelation mellan mätningarna, eftersom punkterna ligger så tätt och eftersom inmätningen sker under en kort tidsperiod. Antingen mäts ett flertal punkter i varje stöd-/kontrollyta, läs mer i referens [3] <detta dokument>, eller så väljs annan metod enligt HMK-ReGe 2013, bilaga B.1. Nätverks-RTK mot SWEPOS är inte lämplig för standardnivå 3 eller vid särskilda krav på lägesosäkerhet i standardnivå 2. Justerad och delvis ny text i HMK-Laserdata 2014, bilaga A.3.2: Produkt och metadata c.1) Kontroll med hjälp av kontrollytor/objekt på öppna ytor Objekten kan vara signalerade eller naturliga. För att undvika inverkan av klassning och punkttäthet placeras de på väldefinierade ytor i öppen terräng. Kontrollen kommer därför att ge en realistisk bild av lägesosäkerheten på öppna väldefinierade ytor men en optimistisk bild av lägesosäkerheten på områden med vegetation, stora lutningar mm. Kontrollen sker genom jämförelse mellan laserpunktmolnet, efter beräkning enligt avsnitt <i HMK-Laserdata 2014>, och ytor- /objekt med kända positioner. För denna kontroll används: - Stödytor/stödobjekt som har lägesbestämts för att passa in laserdata mot överordnat referenssystem. Utförs av leverantören och resultatet redovisas i produktionsdokumentationen, se Bilaga A.1.3 <i HMK-Laserdata 2014>. - Oberoende kontrollytor/kontrollobjekt, som mäts in separat och fördelas jämnt över projektområdet. Beställaren avgör vem som utför kontrollen i egen regi eller som ett tilläggsuppdrag till leverantören. I praktiken kan även andra konfigurationer komma ifråga. Exempelvis kan brunnslock och streckmålningar i vägbanan mätas in i såväl höjd som plan (alla fyra hörnen på ett målat streck). Orsaken kan vara att sådana inmätningar behövs i andra sammanhang, för andra ändamål eller för att åstadkomma kombinerade produkter, där laserdata bara är en av flera datakällor. Det bör dock gå att tilllämpa beskrivet förfarande även i dessa sammanhang. HMK Teknisk rapport 2014:1 17 (27)
18 - RMS används som kvalitetsmått vid kontroll av laserdata i höjdled. Off-set, radiellt, används som kvalitetsmått vid kontroll av laserdata i plan. Tumregler för toleranser för enskilda ytor/objekt redovisas i Tabell A.3.2 <i HMK-Laserdata 2014>. Där finns även tumregler för genomsnittliga RMS i plan och höjd. Värdena utgår från att jämförelseytorna/-objekten är utformade på det sätt som beskrivs i avsnitt <i HMK-Laserdata 2014>. Totalt för hela projektet beräknas även medelskiften i höjd, Northing och Easting samt totalt, radiellt off-set i plan. För dessa storheter ger HMK för tillfället inga toleranser, men de ska redovisas för att ge möjlighet till en kvalitativ granskning av helheten. Dessutom är det naturligtvis möjligt för varje beställare att ställa egna krav på dessa storheter. Läs mer om tumreglerna, toleranser med mera i referens [3] <detta dokument>. - RMS-värden beräknas enligt: RMS höjd = n i= 1 H n 2 i RMS plan = n n 2 2 Ni + Ei i= 1 i= 1 där avser avvikelsen mellan lasermätningen och inmätningen av jämförelseobjektet och n är antalet punkter. - Medelskift, i höjd ( H ) och plan ( N, E ), beräknas som: 1 n Hi n i= 1 H = 1 n Ni n i= 1 N = - Radiellt off-set i plan beräknas som: R= N 2 + E 2 (totalt) n 1 n Ei n i= 1 E= R = N + E 2 2 i i i (enskilt objekt) Figur. Principiell placering av stöd, kontroller och tvärstråk i ett skanningsområde på 25x50 km i NNH. HMK Teknisk rapport 2014:1 18 (27)
19 Tabell A.3.2 <i HMK-Laserdata 2014>. Formler avseende gränsvärden- /toleranser för genomsnittliga och enskilda RMS i förhållande till projektets specificerade standardosäkerhet. Höjd (mm) Plan (mm) Slutproduktens standardosäkerhet Sh1 (100) Sh2 (50) Sh3 (20) Sp1=3*Sh1 (300) Sp2=3*Sh2 (150) Sp3=2,5*Sh3 (50) Gränsvärde, genomsnittliga RMS i kontroll-/stödpunkter för hela projektet (tumregel) 1,6*Sh1 (160) 1,6*Sh2 (80) 1,6*Sh3 (30) 1,6*Sp1 (480) 1,6*Sp2 (240) 1,6*Sp3 (80) Tolerans, enskilda RMS i kontroll-/stödpunkter (tumregel) 2*Sh1 (200) 2*Sh2 (100) 2*Sh3 (40) 2*Sp1 (600) 2*Sp2 (300) 2*Sp3 (100) Inom parantes i tabellen framgår faktiska värden på standarosäkerhet från Tabell 2.3 <i HMK-Laserdata 2014> samt beräknade värden för gränsvärden/toleranser. Exempel: Följande exempel kommer från NNH-projektet, läs mer i referens [3] <denna rapport>. Jämförelsen avser dels separata/oberoende kontrollpunkter, dels kontroll mot stödpunkterna efter stråkutjämning och inpassning mot stöd. Exemplet avser att illustrera hur de olika lägesosäkerhetsparametrarna tas fram. Jämförelse mellan laserdata och kontrollytor i höjd. Yta Medelavvikelse (skift) [m] StdAvv. (brus) [m] RMS [m] 09P01_501H P01_502H P01_503H P01_504H P01_505H P01_506H P01_507H P01_508H P01_509H Totalt (medel) (RMS) (genomsnitt) HMK Teknisk rapport 2014:1 19 (27)
20 Jämförelse mellan laserdata och stödytor i höjd. Yta Medelavvikelse (skift) [m] StdAvv. (brus) [m] RMS [m] 09P01_001H P01_002H P01_003H P01_004H P01_005H P01_006H Totalt (medel) (RMS) (genomsnitt) Jämförelse mellan laserdata och kontrollobjekt i plan. Objekt dnorthing (skift) [m] deasting (skift) [m] dplan (radiellt off-set) [m] 09p01_501P p01_504P p01_505P p01_506P p02_507P p02_508P p02_509P Totalt (medelskift) (RMS) (medelskift) (RMS) (RMS, radiellt medel-offset) Jämförelse mellan laserdata och stödobjekt i plan. Objekt dnorthing (skift) [m] deasting (skift) [m] dplan (radiellt offset) [m] 09p01_001p p01_002p p01_003p p01_005p p01_006p Totalt (medelskift) (RMS) (medelskift) (RMS) (RMS, radiellt medel-offset) HMK Teknisk rapport 2014:1 20 (27)
21 Slutsats Punkttätheten var specificerad till 0.5 punkter per kvm, vilket motsvarar ett punktavstånd på ca 1,5 meter i genomsnitt. Om vi därför hänför projektet till 1 så skulle toleranserna för enskilda värden, enligt tabell A.3.2 ovan, bli: - RMS i höjd: max 200 mm på varje yta. - Off-set i plan: max 600 mm för varje objekt. En jämförelse med de gulmarkerade värdena i tabellerna visar att aktuella ytor/objekt klarar kraven i samtliga fall. Låt oss även titta på medelskift och genomsnittliga RMS-värden Sammanställning av samtliga ytor/objekt (enhet: meter). Höjd, totalt för alla ytor (15 st.) (medelskift H) (RMS) (StdAvv H) (genomsnittligt RMS-höjd) Plan, totalt för alla objekt (12 st.) (medelskift N) (RMS) (medelskift E) (RMS) (radiellt off-set) (genomsnittligt RMS-plan) Ur detta kan vi utläsa att projektet totalt sett ligger väl centrerat, utan nämnvärda skift i vare sig höjd (0.003) eller plan (0.021 radiellt), samt att genomsnittliga RMS ligger väl under tumregelns värden både i höjd (0.048 vs ) och plan (0.161 vs ). Även om det inte finns regelrätta toleranser för dessa storheter så ger de som synes tilläggsinformation, som kan vara av betydelse för helhetsbedömningen. HMK Teknisk rapport 2014:1 21 (27)
22 5 Referenser [1] Dan Klang & Helén Burman (2006): En ny svensk höjdmodell laserskanning, testprojekt Falun. Lantmäteriet, Sverige. LMV-rapport 2006:3. [2] Andreas Rönnberg (2011): Höjdmodellens noggrannhet. Lantmäteriet, Sverige. Intern PM - Ny Nationell Höjdmodell, [3] Patric Jansson & Clas-Göran Persson (2013): The effect of correlation on uncertainty estimates with GPS examples. Journal of Geodetic Science, KTH. Volume 3, June [4] Statens kartverk, Norge (2013) Produktspesifikasjon Nasjonal modell for høydedata fra laserskanning (FKB-Laser), Versjon 2.0, HMK Teknisk rapport 2014:1 22 (27)
23 Bilaga: Lägesosäkerheten i NNH Följande analys bygger på 324 skanningsområden från produktionen av den nationella höjdmodellen (f.d. NNH). Olika aspekter på lägesosäkerheten studeras. Vi analyserar avvikelserna i stöd- och kontrollpunkter efter stråkutjämning och annan anpassning till det överordnade referenssystemet. Det huvudsakliga verktyget är RMS (root mean square), dvs: RMS höjd = n i= 1 H n 2 i RMS plan = n n 2 2 Ni + Ei i= 1 i= 1 n där avser skillnaden mellan lasermätningen och inmätningen av jämförelseobjektet och n är antalet punkter. Projektvisa RMS i plan och höjd Med projekt avser vi här mätning inom ett skanningsområde, som är 25x50 km. Genomsnittliga värden för de projektvisa RMS i plan är m för stödobjekt och m för kontrollobjekt (265 mm i medeltal). De empiriska, två-sidiga, 95 %-iga konfidensintervallen är [ ] m för stöd- och [ ] m för kontrollobjekt. Ensidiga 95 %- intervall är m för stöd- och m för kontrollobjekt eller som avrundat genomsnitt m. Genomsnittliga värden för de projektvisa RMS i höjd är m för stödytor och m för kontrollytor (50 mm i medeltal). Det empiriska, två-sidiga, 95 %-iga konfidensintervallet är ungefär [ ] m för både stöd- och kontrollytor. Ett ensidigt 95 %-intervall är m, eller avrundat m. Utifrån dessa RMS-skattningar får vi att standardosäkerheten i plan alltså är ca. 5 gånger standardosäkerheten i höjd. En tidig tumregel, som hittills har applicerats, är att denna faktor i stället är ca. 3. För NNH verkar alltså kvoten mellan standardosäkerheten i plan och höjd vara större än vad tumregeln anger. Ett annat sätt att skatta denna faktor redovisas i nästa avsnitt, och förhållandet mellan genomsnittliga och individuella RMS-värden (inom en stöd- eller kontrollyta) redovisas i en därpå följande simuleringsstudie. HMK Teknisk rapport 2014:1 23 (27)
24 Relationen mellan RMS i plan och höjd I denna delanalys skattar vi direkt medelvärdet av faktorn mellan standardosäkerhet i plan och höjd, genom att beräkna medeltalet av kvoten mellan RMS i plan och höjd för de 324 projekten. Vi får då följande medeltal: 5.33 för stödpunkter (standardavvikelse 2.0) och 5.23 för kontrollpunkter (standardavvikelse 2.2), dvs i genomsnitt. Det stämmer bra med föregående avsnitt. Ett 95 %-igt konfidensintervall för denna kvot är (empiriskt) [ ] för stödpunkter och [ ] för kontrollpunkter. Dvs. kvoten för NNH mellan standardosäkerheten i plan och höjd ligger i intervallet Även det ger fog för att öka tumregelns faktor 3. Skift i höjd per projekt Genomsnittsavvikelsen i höjd inom ett projekt efter stråkutjämning etc. ges av följande RMS-värden: m för stöd- och m för kontrollytor. Ungefärliga toleranser enligt 2-sigmaprincipen för kvarstående höjdavvikelser (medelskiftet) skulle alltså bli ± 8 mm för stödytor och ± 40 mm för kontrollytor, om man antar ett normalfördelningstänkande. Motsvarande empiriska intervall är ±5 mm resp. ±40 mm, så låt oss anta de avrundade toleranserna ± 10 mm resp. ± 40 mm Totalt RMS vs. individuella RMS-värden en simuleringsstudie Den tidigare, empiriska analysen kompletteras här med en simuleringsstudie a la Monte Carlo. Avsikten är att ge en tumregel för hur genomsnittligt, totalt RMS-värde förhåller sig till de individuella RMS-värdena inom det projekt som det har beräknats ur. Det kan t.ex. ge tumregler för hur stora de genomsnittliga RMS-värdena bör vara i förhållande till de individuella eller tvärtom. Utgångspunkten är hanteringen av stöd och kontroll i höjd. En anpassning har gjorts så gott det går till NNH, t.ex. vad gäller antal punkter inom en stöd-/kontrollyta och antalet stöd-/kontrollytor totalt för projektet. Kvoten mellan det största individuella RMS-värdet och det genomsnittliga RMS-värdet beräknas i varje simulering, dvs. max(rms ) / RMS i Det gav medeltalet 0.85, dvs. det största enskilda värdet är igenomsnitt 1 / gånger medeltalet, dvs. ca 18 % större. Nu är ju inte medeltalet särskilt bra som mått bättre då att tänka i termer av konfidensintervall även här. medel HMK Teknisk rapport 2014:1 24 (27)
25 Ett ensidigt 95 %-igt konfidensintervall för kvoten blir (empiriskt) 08,. dvs. sannolikheten är bara 5 % att ett individuellt RMS-värde är mer än 1/ 08. = 125. (dvs. 25 %) större än det genomsnittliga RMS-värdet. Utifrån detta kan vi skatta toleranser för enskilda RMS-värden (inom en stöd-/kontrollyta) från de genomsnittliga toleranserna Då får vi följande ensidiga, 95 %-iga intervall (toleranser): - Plan: m (0.371 gånger 1.25) för stöd- och m (0.412 gånger 1.25) för kontrollobjekt. Säg m i genomsnitt. - Höjd: m (ungefär gånger 1.25) för bägge kategorierna. Sammanfattning toleranser/gränsvärden Hur bör då en kontrollapparat baserad på vår analys formuleras? Sammanfattningsvis verkar följande värden rimliga: - Toleransen för enskilda RMS i höjd, inom en kontrollyta, kan sättas till 100 mm. - Toleransen för enskilda off-set i plan, inom ett kontrollobjekt, kan sättas till 500 mm (5 gånger höjdtoleransen). - Gränsvärdet för det genomsnittliga RMS i höjd, inom ett projekt, kan sättas till 80 mm (ca. 0.8 gånger toleransen för enskilda RMS). - Gränsvärdet för genomsnittlig off-set i plan, inom ett projekt, kan sättas till 400 mm (5 gånger föregående tolerans). - Gränsvärdet för genomsnittliga höjdavvikelser (medelskiftet), inom ett projekt, kan sättas till ± 10 mm för stödpunkter och ± 40 mm för kontrollpunkter. Observera att vi här inte lägger ett förslag att ändra toleranserna för det nationella höjdmodellsprojektet. Syftet är bara att presentera toleranser som harmonierar med riktiga data, dvs. snarast en efterhandskaraktäristik av lasermätningarna. Och en begränsning är naturligtvis att underlaget ligger på en övergripande projektnivå, vilket inte gör det möjligt att direkt studera egenskaper som ligger på detaljnivå, t.ex. enskilda kontrollytor etc. (Ett mindre exempel på detaljnivå ingår dock i förslaget i kapitel 4.) Då är då frågan hur väl dessa toleranser/gränsvärden stämmer med verkligheten. I Tabell 4 redovisas resultatet av mätningen för den nationella höjdmodellen som naturligtvis är korrelerad med toleranserna, eftersom den har utgjort underlag för att ta fram dessa. HMK Teknisk rapport 2014:1 25 (27)
26 Som synes ligger förkastningsnivån på knappt 5 %, som var den avsedda nivån. Konstruktionen verkar alltså fungera särskilt för de oberoende kontrollytorna/-objekten. Tabell 4. Jämförelse mellan framtagna gränsvärden/toleranser och produktionen av den nationella höjdmodellen. Andelen i % som överskrider gränsen. Höjd Plan Stödytor Stödobjekt Kontrollytor Kontrollobjekt Genomsnittliga RMS/off-set Genomsnittliga höjdavvikelser (medelskift) 3% 4% 2% 6% 1 % 5 % - - Till vilken standardosäkerhet ska man då hänföra toleranserna, dvs. vilken standardosäkerhet för slutprodukten motsvaras av toleransvärdena? Vi räknar ju baklänges här. Det finns flera motkandidater till att använda själva toleranserna som mått på slutproduktens lägesosäkerhet: - toleransen för enskilda RMS i höjd, inom en kontrollyta, är 100 mm; motsvarar väntevärdet 65 mm för tillhörande standardosäkerhet - toleransen för enskilda off-set i plan, inom ett kontrollobjekt, är 500 mm; motsvarar väntevärdet 330 mm för tillhörande standardosäkerhet eller - gränsvärdet för det genomsnittliga RMS i höjd, inom ett projekt, är 80 mm; motsvarar väntevärdet 50 mm för tillhörande standardosäkerhet - gränsvärdet för genomsnittligt off-set i plan, inom ett projekt, är 400 mm; motsvarar väntevärdet 265 mm för tillhörande standardosäkerhet. Dvs. ska standardosäkerheten i höjd sättas till 50, 65, 80 eller 100 mm, och den i plan till 265, 330, 400 eller 500 mm? Den intuitiva tolkningen är att genomsnittligt RMS i kontrollpunkterna är den standardosäkerhet som man kan förvänta sig av slutprodukten för andra hårdgjorda ytor, som inte är kontrollpunkter. Avrundat sätter vi därför slutproduktens standardosäkerhet till 50 mm i höjd och 250 mm i plan i denna studie. Motsvarande gräns- HMK Teknisk rapport 2014:1 26 (27)
27 värden för genomsnittliga RMS/off-set är 80 mm i höjd och 400 mm i plan, men de betraktar vi mest som tumregler för dessa översiktliga indikatorer. Däremot är toleranserna för enskilda RMS/off-set 100 resp. 500 mm mer konstruktiva som kontrollmetoder eftersom de anger var problemen finns; den informationen får man inte ur de genomsnittliga värdena. Vi får sammanfattningsvis de värden som anges i Tabell 5. Tabell 5. Gränsvärden/toleranser i förhållande till specificerad standardosäkerhet. Höjd (mm) Plan (mm) Specificerad standardosäkerhet för slutprodukten Gränsvärde för genomsnittliga RMS i kontroll-/stödpunkter för hela projektet (tumregel) Tolerans för enskilda RMS i kontroll-/stödpunkter x50 = x250 = 400 2x50 = 100 2x250 = 500 Varför kan man då inte använda specificerad standardosäkerhet för slutprodukten som tolerans? Dvs. 50 mm i höjd och 250 mm i plan. I Tabell 6 redovisas den andel av skanningsområdena som skulle ha underkänts om standardosäkerheterna hade använts som toleranser. Jämför med Tabell 4 många områden skulle underkännas i onödan! Tabell 6. Mängden underkända skanningsområden om standardosäkerheterna används som toleranser för kontrollpunkterna. Andelen i % som överskrider gränsen. Kontrollytor i höjd Kontrollobjekt i plan Genomsnittliga RMS/off-set Genomsnittliga höjdavvikelser 46% 50% 30% - HMK Teknisk rapport 2014:1 27 (27)
Statistisk acceptanskontroll
 Publikation 1994:41 Statistisk acceptanskontroll BILAGA 1 Exempel på kontrollförfaranden Metodbeskrivning 908:1994 B1 Exempel på kontrollförfaranden... 5 B1.1 Nivåkontroll av terrassyta, exempel... 5 B1.1.1
Publikation 1994:41 Statistisk acceptanskontroll BILAGA 1 Exempel på kontrollförfaranden Metodbeskrivning 908:1994 B1 Exempel på kontrollförfaranden... 5 B1.1 Nivåkontroll av terrassyta, exempel... 5 B1.1.1
Test av kranspetsvågar i virkesfordon
 Datum 2016-02-18 Författare Sven Gustafsson Test av kranspetsvågar i virkesfordon WWW.SDC.SE P o s t a d r e s s : 8 5 1 8 3 S u n d s v a l l B e s ö k s a d r e s s : S k e p p a r p l a t s e n 1 T
Datum 2016-02-18 Författare Sven Gustafsson Test av kranspetsvågar i virkesfordon WWW.SDC.SE P o s t a d r e s s : 8 5 1 8 3 S u n d s v a l l B e s ö k s a d r e s s : S k e p p a r p l a t s e n 1 T
Att göra investeringskalkyler med hjälp av
 MIO040 Industriell ekonomi FK 2013-02-21 Inst. för Teknisk ekonomi och Logistik Mona Becker Att göra investeringskalkyler med hjälp av Microsoft Excel 2007 Förord Föreliggande PM behandlar hur man gör
MIO040 Industriell ekonomi FK 2013-02-21 Inst. för Teknisk ekonomi och Logistik Mona Becker Att göra investeringskalkyler med hjälp av Microsoft Excel 2007 Förord Föreliggande PM behandlar hur man gör
HMK. Geodesi: Teknisk specifikation och metodval. handbok i mät- och kartfrågor
 HMK handbok i mät- och kartfrågor Geodesi: Teknisk specifikation och metodval Arbetsdokument juli 2015 Förord juli 2015 HMK-Geodesi arbetsdokument 2015 består av fyra dokument som tillsammans utgör HMK-Geodesi.
HMK handbok i mät- och kartfrågor Geodesi: Teknisk specifikation och metodval Arbetsdokument juli 2015 Förord juli 2015 HMK-Geodesi arbetsdokument 2015 består av fyra dokument som tillsammans utgör HMK-Geodesi.
http://www.leidenhed.se Senaste revideringen av kapitlet gjordes 2014-05-08, efter att ett fel upptäckts.
 Dokumentet är från sajtsidan Matematik: som ingår i min sajt: http://www.leidenhed.se/matte.html http://www.leidenhed.se Minst och störst Senaste revideringen av kapitlet gjordes 2014-05-08, efter att
Dokumentet är från sajtsidan Matematik: som ingår i min sajt: http://www.leidenhed.se/matte.html http://www.leidenhed.se Minst och störst Senaste revideringen av kapitlet gjordes 2014-05-08, efter att
HMK. Lägesosäkerhet vid fotogrammetrisk detaljmätning i 3D. Clas-Göran Persson. Teknisk rapport 2013:3. handbok i mät- och kartfrågor
 HMK handbok i mät- och kartfrågor Lägesosäkerhet vid fotogrammetrisk detaljmätning i 3D Clas-Göran Persson Teknisk rapport 2013:3 Förord/Sammanfattning Denna rapport innehåller en analys av examensarbetet
HMK handbok i mät- och kartfrågor Lägesosäkerhet vid fotogrammetrisk detaljmätning i 3D Clas-Göran Persson Teknisk rapport 2013:3 Förord/Sammanfattning Denna rapport innehåller en analys av examensarbetet
Algoritm för uppskattning av den maximala effekten i eldistributionsnät med avseende på Nätnyttomodellens sammanlagringsfunktion
 Algoritm för uppskattning av den maximala effekten i eldistributionsnät med avseende på Nätnyttomodellens sammanlagringsfunktion Carl Johan Wallnerström December 2005 Kungliga Tekniska Högskolan (KTH),
Algoritm för uppskattning av den maximala effekten i eldistributionsnät med avseende på Nätnyttomodellens sammanlagringsfunktion Carl Johan Wallnerström December 2005 Kungliga Tekniska Högskolan (KTH),
Bilaga 4.1 Uppskattning av antalet erforderliga provpunkter och analyser vid detaljundersökningen. Bakgrund. Metod. Konfidensintervallens utveckling
 1 (17) Bilaga 4.1 Uppskattning av antalet erforderliga provpunkter och analyser vid detaljundersökningen Nedanstående material utgick från resultatet av förundersökningen och har legat till grund för dimensioneringen
1 (17) Bilaga 4.1 Uppskattning av antalet erforderliga provpunkter och analyser vid detaljundersökningen Nedanstående material utgick från resultatet av förundersökningen och har legat till grund för dimensioneringen
HMK. HMK-Geodesi Workshop. 17 juni 2013 GRUPPDISKUSSION GRUPP 2. HMK Geodesi, Workshop KTH 2013-06-17. - en handbok i mät- och kartfrågor
 HMK - en handbok i mät- och kartfrågor HMK-Geodesi Workshop 17 juni 2013 GRUPPDISKUSSION GRUPP 2 HMK Geodesi, Workshop KTH 2013-06-17 Diskussion 1 - Struktur och kärndokument Struktur: Synpunkter på strukturen
HMK - en handbok i mät- och kartfrågor HMK-Geodesi Workshop 17 juni 2013 GRUPPDISKUSSION GRUPP 2 HMK Geodesi, Workshop KTH 2013-06-17 Diskussion 1 - Struktur och kärndokument Struktur: Synpunkter på strukturen
Tentamen i Statistik, STA A13 Deltentamen 2, 5p 24 januari 2004, kl. 09.00-13.00
 Karlstads universitet Institutionen för informationsteknologi Avdelningen för statistik Tentamen i Statistik, STA A13 Deltentamen, 5p 4 januari 004, kl. 09.00-13.00 Tillåtna hjälpmedel: Ansvarig lärare:
Karlstads universitet Institutionen för informationsteknologi Avdelningen för statistik Tentamen i Statistik, STA A13 Deltentamen, 5p 4 januari 004, kl. 09.00-13.00 Tillåtna hjälpmedel: Ansvarig lärare:
2011 Studsvik AB PANORAMA-BILDTAGNING. Tony Björkman
 2011 Studsvik AB Tony Björkman PANORAMA-BILDTAGNING Filminspelning och visuell inspektion är två beprövade metoder för avsyning av bränslestavar. Ett nytt sätt att avsyna är att skapa panoramabilder vilket
2011 Studsvik AB Tony Björkman PANORAMA-BILDTAGNING Filminspelning och visuell inspektion är två beprövade metoder för avsyning av bränslestavar. Ett nytt sätt att avsyna är att skapa panoramabilder vilket
Dekomponering av löneskillnader
 Lönebildningsrapporten 2013 133 FÖRDJUPNING Dekomponering av löneskillnader Den här fördjupningen ger en detaljerad beskrivning av dekomponeringen av skillnader i genomsnittlig lön. Först beskrivs metoden
Lönebildningsrapporten 2013 133 FÖRDJUPNING Dekomponering av löneskillnader Den här fördjupningen ger en detaljerad beskrivning av dekomponeringen av skillnader i genomsnittlig lön. Först beskrivs metoden
En ideal op-förstärkare har oändlig inimedans, noll utimpedans och oändlig förstärkning.
 F5 LE1460 Analog elektronik 2005-11-23 kl 08.15 12.00 Alfa En ideal op-förstärkare har oändlig inimedans, noll utimpedans och oändlig förstärkning. ( Impedans är inte samma sak som resistans. Impedans
F5 LE1460 Analog elektronik 2005-11-23 kl 08.15 12.00 Alfa En ideal op-förstärkare har oändlig inimedans, noll utimpedans och oändlig förstärkning. ( Impedans är inte samma sak som resistans. Impedans
Kurvlängd och geometri på en sfärisk yta
 325 Kurvlängd och geometri på en sfärisk yta Peter Sjögren Göteborgs Universitet 1. Inledning. Geometrin på en sfärisk yta liknar planets geometri, med flera intressanta skillnader. Som vi skall se nedan,
325 Kurvlängd och geometri på en sfärisk yta Peter Sjögren Göteborgs Universitet 1. Inledning. Geometrin på en sfärisk yta liknar planets geometri, med flera intressanta skillnader. Som vi skall se nedan,
BIOSTATISTISK GRUNDKURS, MASB11 ÖVNING 8 (2016-05-02) OCH INFÖR ÖVNING 9 (2016-05-09)
 OCH INFÖR ÖVNING 9 (2016-05-09)") LUNDS UNIVERSITET, MATEMATIKCENTRUM, MATEMATISK STATISTIK BIOSTATISTISK GRUNDKURS, MASB11 ÖVNING 8 (2016-05-02) OCH INFÖR ÖVNING 9 (2016-05-09) Aktuella avsnitt i boken är Kapitel 7. Lektionens mål: Du
LUNDS UNIVERSITET, MATEMATIKCENTRUM, MATEMATISK STATISTIK BIOSTATISTISK GRUNDKURS, MASB11 ÖVNING 8 (2016-05-02) OCH INFÖR ÖVNING 9 (2016-05-09) Aktuella avsnitt i boken är Kapitel 7. Lektionens mål: Du
Följa upp, utvärdera och förbättra
 Kapitel 3 Följa upp, utvärdera och förbättra Det tredje steget i tillsynsprocessen är att följa upp och utvärdera tillsynsverksamheten och det fjärde steget är förbättringar. I detta kapitel beskrivs båda
Kapitel 3 Följa upp, utvärdera och förbättra Det tredje steget i tillsynsprocessen är att följa upp och utvärdera tillsynsverksamheten och det fjärde steget är förbättringar. I detta kapitel beskrivs båda
Statistik och epidemiologi T5
 Statistik och epidemiologi T5 Anna Axmon Biostatistiker Yrkes- och miljömedicin Dagens föreläsning Fördjupning av hypotesprövning Repetition av p-värde och konfidensintervall Tester för ytterligare situationer
Statistik och epidemiologi T5 Anna Axmon Biostatistiker Yrkes- och miljömedicin Dagens föreläsning Fördjupning av hypotesprövning Repetition av p-värde och konfidensintervall Tester för ytterligare situationer
k x om 0 x 1, f X (x) = 0 annars. Om Du inte klarar (i)-delen, så får konstanten k ingå i svaret. (5 p)
 = 0 annars. Om Du inte klarar (i)-delen, så får konstanten k ingå i svaret. (5 p)") Avd. Matematisk statistik TENTAMEN I SF1901 SANNOLIKHETSLÄRA OCH STATISTIK MÅNDAGEN DEN 17 AUGUSTI 2009 KL 08.00 13.00. Examinator: Gunnar Englund, tel. 790 74 16. Tillåtna hjälpmedel: Formel- och tabellsamling
Avd. Matematisk statistik TENTAMEN I SF1901 SANNOLIKHETSLÄRA OCH STATISTIK MÅNDAGEN DEN 17 AUGUSTI 2009 KL 08.00 13.00. Examinator: Gunnar Englund, tel. 790 74 16. Tillåtna hjälpmedel: Formel- och tabellsamling
Avd. Matematisk statistik
 Avd. Matematisk statistik TENTAMEN I SF1902 SANNOLIKHETSTEORI OCH STATISTIK, TORSDAGEN DEN 23:E MAJ 2013 KL 14.00 19.00. Kursledare och examinator : Björn-Olof Skytt Tillåtna hjälpmedel: miniräknare, lathund
Avd. Matematisk statistik TENTAMEN I SF1902 SANNOLIKHETSTEORI OCH STATISTIK, TORSDAGEN DEN 23:E MAJ 2013 KL 14.00 19.00. Kursledare och examinator : Björn-Olof Skytt Tillåtna hjälpmedel: miniräknare, lathund
HMK. HMK-Geodesi Workshop. 17 juni 2013 GRUPPDISKUSSION GRUPP 3. HMK Geodesi, Workshop KTH 2013-06-17. - en handbok i mät- och kartfrågor
 HMK - en handbok i mät- och kartfrågor HMK-Geodesi Workshop 17 juni 2013 GRUPPDISKUSSION GRUPP 3 HMK Geodesi, Workshop KTH 2013-06-17 Diskussion 1 - Struktur och kärndokument Struktur: Synpunkter på strukturen
HMK - en handbok i mät- och kartfrågor HMK-Geodesi Workshop 17 juni 2013 GRUPPDISKUSSION GRUPP 3 HMK Geodesi, Workshop KTH 2013-06-17 Diskussion 1 - Struktur och kärndokument Struktur: Synpunkter på strukturen
F14 Repetition. Måns Thulin. Uppsala universitet thulin@math.uu.se. Statistik för ingenjörer 6/3 2013 1/15
 1/15 F14 Repetition Måns Thulin Uppsala universitet thulin@math.uu.se Statistik för ingenjörer 6/3 2013 2/15 Dagens föreläsning Tentamensinformation Exempel på tentaproblem På kurshemsidan finns sex gamla
1/15 F14 Repetition Måns Thulin Uppsala universitet thulin@math.uu.se Statistik för ingenjörer 6/3 2013 2/15 Dagens föreläsning Tentamensinformation Exempel på tentaproblem På kurshemsidan finns sex gamla
SÅ VITT VI VET - Om färg, ljus och rum
 SÅ VITT VI VET - Om färg, ljus och rum BILAGA 1 PILOTSTUDIER I BESKUGGNINGSLÅDAN I våra pilotstudier använde vi den beskuggningslåda som nyttjats inom projektet Gråfärger och rumsupplevelse. 1 Beskuggningslådan
SÅ VITT VI VET - Om färg, ljus och rum BILAGA 1 PILOTSTUDIER I BESKUGGNINGSLÅDAN I våra pilotstudier använde vi den beskuggningslåda som nyttjats inom projektet Gråfärger och rumsupplevelse. 1 Beskuggningslådan
2010-09-13 Resultatnivåns beroende av ålder och kön analys av svensk veteranfriidrott med fokus på löpgrenar
 1 2010-09-13 Resultatnivåns beroende av ålder och kön analys av svensk veteranfriidrott med fokus på löpgrenar av Sven Gärderud, Carl-Erik Särndal och Ivar Söderlind Sammanfattning I denna rapport använder
1 2010-09-13 Resultatnivåns beroende av ålder och kön analys av svensk veteranfriidrott med fokus på löpgrenar av Sven Gärderud, Carl-Erik Särndal och Ivar Söderlind Sammanfattning I denna rapport använder
Nyttiga verktyg vid kalkning? ph okalk Alk okalk ph
 Nyttiga verktyg vid kalkning? ph okalk Alk okalk ph Nyttiga verktyg vid kalkning Till vad kan dom användas? Hur används dom? Kan man lita på dem? Kan dom göras säkrare? Okalkat ph (ph okalk ) Bedöma om
Nyttiga verktyg vid kalkning? ph okalk Alk okalk ph Nyttiga verktyg vid kalkning Till vad kan dom användas? Hur används dom? Kan man lita på dem? Kan dom göras säkrare? Okalkat ph (ph okalk ) Bedöma om
Effektivare avel för jaktegenskaper hos engelsk setter
 Effektivare avel för jaktegenskaper hos engelsk setter av Per Arvelius En hunduppfödare strävar efter att välja de avelsdjur som nedärver önsvärda egenskaper till valparna. Eftersom många egenskaper påverkas
Effektivare avel för jaktegenskaper hos engelsk setter av Per Arvelius En hunduppfödare strävar efter att välja de avelsdjur som nedärver önsvärda egenskaper till valparna. Eftersom många egenskaper påverkas
MSG830 Statistisk analys och experimentplanering - Lösningar
 MSG830 Statistisk analys och experimentplanering - Lösningar Tentamen 15 Januari 2015, 8:30-12:30 Examinator: Staan Nilsson, telefon 073 5599 736, kommer till tentamenslokalen 9:30 och 11:30 Tillåtna hjälpmedel:
MSG830 Statistisk analys och experimentplanering - Lösningar Tentamen 15 Januari 2015, 8:30-12:30 Examinator: Staan Nilsson, telefon 073 5599 736, kommer till tentamenslokalen 9:30 och 11:30 Tillåtna hjälpmedel:
Att arbeta med öppna uppgifter
 Modul: Samband och förändring Del: 1 Öppna uppgifter Att arbeta med öppna uppgifter Ingemar Holgersson, Högskolan Kristianstad Kursplanen i matematik betonar att undervisningen ska leda till att eleverna
Modul: Samband och förändring Del: 1 Öppna uppgifter Att arbeta med öppna uppgifter Ingemar Holgersson, Högskolan Kristianstad Kursplanen i matematik betonar att undervisningen ska leda till att eleverna
Forskning GNSS. Grundkonfigurationen av GPS består av 24 satelliter men idag cirkulerar närmare 30 satelliter runt jordklotet
 Forskning GNSS GNSS (Global Navigation Satellite Systems) är samlingsnamnet för globala satellitbaserade system för navigation, positionsbestämning och tidsöverföring. Det mest kända och använda systemet
Forskning GNSS GNSS (Global Navigation Satellite Systems) är samlingsnamnet för globala satellitbaserade system för navigation, positionsbestämning och tidsöverföring. Det mest kända och använda systemet
TB DEL II BILAGA 3.1 UTREDNING - MÖJLIGHET ATT LÄMNA SID
 TB DEL II BILAGA 3.1 UTREDNING - MÖJLIGHET ATT LÄMNA SID UTREDNING 2011-04-20 01.00 D 2011-006261 2(14) 1 SAMMANFATTNING... 3 2 BEGREPPET - ATT LÄMNA SID... 3 3 ATT LÄMNA SID VID EN BULLERNIVÅ 70 DB(A)
TB DEL II BILAGA 3.1 UTREDNING - MÖJLIGHET ATT LÄMNA SID UTREDNING 2011-04-20 01.00 D 2011-006261 2(14) 1 SAMMANFATTNING... 3 2 BEGREPPET - ATT LÄMNA SID... 3 3 ATT LÄMNA SID VID EN BULLERNIVÅ 70 DB(A)
DE FYRA RÄKNESÄTTEN (SID. 11) MA1C: AVRUNDNING
 MA1C: AVRUNDNING") DE FYRA RÄKNESÄTTEN (SID. 11) 1. Benämn med korrekt terminologi talen som: adderas. subtraheras. multipliceras. divideras.. Addera 10 och. Dividera sedan med. Subtrahera 10 och. Multiplicera sedan med..
DE FYRA RÄKNESÄTTEN (SID. 11) 1. Benämn med korrekt terminologi talen som: adderas. subtraheras. multipliceras. divideras.. Addera 10 och. Dividera sedan med. Subtrahera 10 och. Multiplicera sedan med..
Beskrivande statistik Kapitel 19. (totalt 12 sidor)
") Beskrivande statistik Kapitel 19. (totalt 12 sidor) För att åskådliggöra insamlat material från en undersökning används mått, tabeller och diagram vid sammanställningen. Det är därför viktigt med en grundläggande
Beskrivande statistik Kapitel 19. (totalt 12 sidor) För att åskådliggöra insamlat material från en undersökning används mått, tabeller och diagram vid sammanställningen. Det är därför viktigt med en grundläggande
9-1 Koordinatsystem och funktioner. Namn:
 9- Koordinatsystem och funktioner. Namn: Inledning I det här kapitlet skall du lära dig vad ett koordinatsystem är och vilka egenskaper det har. I ett koordinatsystem kan man representera matematiska funktioner
9- Koordinatsystem och funktioner. Namn: Inledning I det här kapitlet skall du lära dig vad ett koordinatsystem är och vilka egenskaper det har. I ett koordinatsystem kan man representera matematiska funktioner
MÄTNING AV BRÄNSLEVED VID ENA ENERGI AB I ENKÖPING Mats Nylinder och Hans Fryk
 Results esearch 9 Research results from the Department of Forest Products at the University of Agricultural Sciences, Uppsala, Sweden www.slu.se/skogensprodukter MÄTNING AV BRÄNSLEVED VID ENA ENERGI AB
Results esearch 9 Research results from the Department of Forest Products at the University of Agricultural Sciences, Uppsala, Sweden www.slu.se/skogensprodukter MÄTNING AV BRÄNSLEVED VID ENA ENERGI AB
ARIMA del 2. Patrik Zetterberg. 19 december 2012
 Föreläsning 8 ARIMA del 2 Patrik Zetterberg 19 december 2012 1 / 28 Undersöker funktionerna ρ k och ρ kk Hittills har vi bara sett hur autokorrelationen och partiella autokorrelationen ser ut matematiskt
Föreläsning 8 ARIMA del 2 Patrik Zetterberg 19 december 2012 1 / 28 Undersöker funktionerna ρ k och ρ kk Hittills har vi bara sett hur autokorrelationen och partiella autokorrelationen ser ut matematiskt
LABORATION ENELEKTRONSPEKTRA
 LABORATION ENELEKTRONSPEKTRA Syfte och mål Uppgiften i denna laboration är att studera atomspektra från väte och natrium i det synliga våglängdsområdet och att med hjälp av uppmätta våglängder från spektrallinjerna
LABORATION ENELEKTRONSPEKTRA Syfte och mål Uppgiften i denna laboration är att studera atomspektra från väte och natrium i det synliga våglängdsområdet och att med hjälp av uppmätta våglängder från spektrallinjerna
PM NÄTAVGIFTER Sammanfattning.
 PM NÄTAVGIFTER Uppdragsansvarig Anna Werner Mobil +46 (0)768184915 Fax +46 105050010 anna.werner@afconsult.com Datum Referens 2013-12-10 587822-2 (2a) Villaägarna Jakob Eliasson jakob.eliasson@villaagarna.se
PM NÄTAVGIFTER Uppdragsansvarig Anna Werner Mobil +46 (0)768184915 Fax +46 105050010 anna.werner@afconsult.com Datum Referens 2013-12-10 587822-2 (2a) Villaägarna Jakob Eliasson jakob.eliasson@villaagarna.se
ANDREAS REJBRAND 2014-04-25 Matematik http://www.rejbrand.se. Numeriska serier. Andreas Rejbrand, april 2014 1/29
 Numeriska serier Andreas Rejbrand, april 2014 1/29 1 Inledning Författarens erfarenhet säger att momentet med numeriska serier är ganska svårt för många studenter i inledande matematikkurser på högskolenivå.
Numeriska serier Andreas Rejbrand, april 2014 1/29 1 Inledning Författarens erfarenhet säger att momentet med numeriska serier är ganska svårt för många studenter i inledande matematikkurser på högskolenivå.
Bruksanvisning. Instrumentdetaljer
 4a 5 4b 14 A 9 1 13 2 3a 12 11 7 6 15 8 B C D E 3a F 1. 2. G 10 3. 7 H I K s L M S Bruksanvisning STABILA-rotationslasern är en enkel användbar rotationslaser för vågrät och lodrät avvägning. Den är självavvägande
4a 5 4b 14 A 9 1 13 2 3a 12 11 7 6 15 8 B C D E 3a F 1. 2. G 10 3. 7 H I K s L M S Bruksanvisning STABILA-rotationslasern är en enkel användbar rotationslaser för vågrät och lodrät avvägning. Den är självavvägande
MATEMATIK. Ämnets syfte
 MATEMATIK Matematiken har en flertusenårig historia med bidrag från många kulturer. Den utvecklas, såväl ur praktiska behov som ur människans nyfikenhet och lust att utforska matematiken som sådan. Kommunikation
MATEMATIK Matematiken har en flertusenårig historia med bidrag från många kulturer. Den utvecklas, såväl ur praktiska behov som ur människans nyfikenhet och lust att utforska matematiken som sådan. Kommunikation
BASFYSIK BFN 120. Laborationsuppgifter med läge, hastighet och acceleration. Epost. Namn. Lärares kommentar
 BASFYSIK BFN 120 Galileo Galilei, italiensk naturforskare (1564 1642) Laborationsuppgifter med läge, hastighet och acceleration Namn Epost Lärares kommentar Institutionen för teknik och naturvetenskap
BASFYSIK BFN 120 Galileo Galilei, italiensk naturforskare (1564 1642) Laborationsuppgifter med läge, hastighet och acceleration Namn Epost Lärares kommentar Institutionen för teknik och naturvetenskap
Tomträttsindexet i KPI: förslag om ny beräkningsmetod
 STATISTISKA CENTRALBYRÅN PM 1(7) Tomträttsindexet i KPI: förslag om ny beräkningsmetod Enhetens förslag. Enheten för prisstatistik föreslår att en ny beräkningsmetod införs för tomträttsindexet så snart
STATISTISKA CENTRALBYRÅN PM 1(7) Tomträttsindexet i KPI: förslag om ny beräkningsmetod Enhetens förslag. Enheten för prisstatistik föreslår att en ny beräkningsmetod införs för tomträttsindexet så snart
Sofia Malm, 151013 Artikeln får fritt publiceras av ras- och specialklubbar på webbplats eller i tidning
 Sofia Malm, 151013 Artikeln får fritt publiceras av ras- och specialklubbar på webbplats eller i tidning Index för bättre ledhälsa nu för fler raser! I januari 2016 införs index för, och i vissa raser
Sofia Malm, 151013 Artikeln får fritt publiceras av ras- och specialklubbar på webbplats eller i tidning Index för bättre ledhälsa nu för fler raser! I januari 2016 införs index för, och i vissa raser
Till dig som driver företag
 Till dig som driver företag Underlag för att arbeta med pilotsatsningen Finansiering av strategi för immateriella tillgångar för små och medelstora företag Framtagning av strategi för affärsstrategisk
Till dig som driver företag Underlag för att arbeta med pilotsatsningen Finansiering av strategi för immateriella tillgångar för små och medelstora företag Framtagning av strategi för affärsstrategisk
TATA42: Föreläsning 10 Serier ( generaliserade summor )
") TATA42: Föreläsning 0 Serier ( generaliserade summor ) Johan Thim 5 maj 205 En funktion s: N R brukar kallas talföljd, och vi skriver ofta s n i stället för s(n). Detta innebär alltså att för varje heltal
TATA42: Föreläsning 0 Serier ( generaliserade summor ) Johan Thim 5 maj 205 En funktion s: N R brukar kallas talföljd, och vi skriver ofta s n i stället för s(n). Detta innebär alltså att för varje heltal
INSTRUKTION Specifikation E modul.doc
 1 (13) Syfte Detta är en instruktion för hur det är tänkt att specifikationen ska fyllas i vid beställning av en E modul. Förhoppningen är dock att specifikationsmallen är självinstruerande så att detta
1 (13) Syfte Detta är en instruktion för hur det är tänkt att specifikationen ska fyllas i vid beställning av en E modul. Förhoppningen är dock att specifikationsmallen är självinstruerande så att detta
Repetitionsuppgifter i Matematik inför Basår. Matematiska institutionen Linköpings universitet 2014
 Repetitionsuppgifter i Matematik inför Basår Matematiska institutionen Linköpings universitet 04 Innehåll De fyra räknesätten Potenser och rötter 7 Algebra 0 4 Funktioner 7 Logaritmer 9 6 Facit 0 Repetitionsuppgifter
Repetitionsuppgifter i Matematik inför Basår Matematiska institutionen Linköpings universitet 04 Innehåll De fyra räknesätten Potenser och rötter 7 Algebra 0 4 Funktioner 7 Logaritmer 9 6 Facit 0 Repetitionsuppgifter
PM Riksläger 2016 Allmän information Kontrol markering: Kontrol Definition: Kartritare: Banläggare: Observera!
 PM Riksläger 2016 Allmän information Kontrollmarkering: Vid varje kontroll sitter en orange/vitt snitsel med kodsiffra (se bild). Kontroll Definition: Kontrolldefinition finns tryckt på kartan. Kartritare:
PM Riksläger 2016 Allmän information Kontrollmarkering: Vid varje kontroll sitter en orange/vitt snitsel med kodsiffra (se bild). Kontroll Definition: Kontrolldefinition finns tryckt på kartan. Kartritare:
Ickelinjära ekvationer
 Löpsedel: Icke-linjära ekvationer Ickelinjära ekvationer Beräkningsvetenskap I Varför är det svårt att lösa icke-linjära ekvationer? Iterativa metoder Bisektion/intervallhalvering Newton-Raphsons metod
Löpsedel: Icke-linjära ekvationer Ickelinjära ekvationer Beräkningsvetenskap I Varför är det svårt att lösa icke-linjära ekvationer? Iterativa metoder Bisektion/intervallhalvering Newton-Raphsons metod
Misslyckade angrepp av granbarkborrar - Slutrapport
 Misslyckade angrepp av granbarkborrar - Slutrapport Niklas Björklund & Bo Långström Institutionen för Ekologi, SLU. Bakgrund En pilotstudie år 2008 visade att misslyckade angrepp av granbarkborre förekommer
Misslyckade angrepp av granbarkborrar - Slutrapport Niklas Björklund & Bo Långström Institutionen för Ekologi, SLU. Bakgrund En pilotstudie år 2008 visade att misslyckade angrepp av granbarkborre förekommer
Praktisk GNSS-mätning. Tips och tricks Ronny Andersson, Metria
 Praktisk GNSS-mätning Tips och tricks Ronny Andersson, Metria Vem är då jag? Ronny Andersson Jobbar som teknisk lantmätare på Metrias geodesienhet i Gävle. Mätansvarig i många olika typer av uppdrag och
Praktisk GNSS-mätning Tips och tricks Ronny Andersson, Metria Vem är då jag? Ronny Andersson Jobbar som teknisk lantmätare på Metrias geodesienhet i Gävle. Mätansvarig i många olika typer av uppdrag och
Vid köp av fem eller fler kartor ges 10 SEK rabatt per karta. Övningarna sitter ute:
 Allmän information om träningsövningarna i Sälen 2016 Kontrollmarkering: Vid varje kontroll sitter en orange/vitt snitsel med kodsiffra. Kontroll Definition: Kontrolldefinition finns tryckt på kartan.
Allmän information om träningsövningarna i Sälen 2016 Kontrollmarkering: Vid varje kontroll sitter en orange/vitt snitsel med kodsiffra. Kontroll Definition: Kontrolldefinition finns tryckt på kartan.
Föreläsning 3.1: Datastrukturer, en översikt
 Föreläsning.: Datastrukturer, en översikt Hittills har vi i kursen lagt mycket fokus på algoritmiskt tänkande. Vi har inte egentligen ägna så mycket uppmärksamhet åt det andra som datorprogram också består,
Föreläsning.: Datastrukturer, en översikt Hittills har vi i kursen lagt mycket fokus på algoritmiskt tänkande. Vi har inte egentligen ägna så mycket uppmärksamhet åt det andra som datorprogram också består,
Tentamen i Matematisk statistik Kurskod S0001M
 Tentamen i Matematisk statistik Kurskod S0001M Poäng totalt för del 1: 25 (8 uppgifter) Tentamensdatum 2012-01-13 Poäng totalt för del 2: 30 (3 uppgifter) Skrivtid 09.00 14.00 Lärare: Adam Jonsson, Ove
Tentamen i Matematisk statistik Kurskod S0001M Poäng totalt för del 1: 25 (8 uppgifter) Tentamensdatum 2012-01-13 Poäng totalt för del 2: 30 (3 uppgifter) Skrivtid 09.00 14.00 Lärare: Adam Jonsson, Ove
a) Anpassa en trinomial responsmodell med övriga relevanta variabler som (icketransformerade)
 Anpassa en trinomial responsmodell med övriga relevanta variabler som (icketransformerade)") 5:1 Studien ifråga, High School and beyond, går ut på att hitta ett samband mellan vilken typ av program generellt, praktiskt eller akademiskt som studenter väljer baserat på olika faktorer kön, ras, socioekonomisk
5:1 Studien ifråga, High School and beyond, går ut på att hitta ett samband mellan vilken typ av program generellt, praktiskt eller akademiskt som studenter väljer baserat på olika faktorer kön, ras, socioekonomisk
Signalanalys med snabb Fouriertransform
 Laboration i Fourieranalys, MVE030 Signalanalys med snabb Fouriertransform Den här laborationen har två syften: dels att visa lite på hur den snabba Fouriertransformen fungerar, och lite om vad man bör
Laboration i Fourieranalys, MVE030 Signalanalys med snabb Fouriertransform Den här laborationen har två syften: dels att visa lite på hur den snabba Fouriertransformen fungerar, och lite om vad man bör
Tentamen i Statistik, STA A10 och STA A13 (9 poäng) 23 februari 2004, klockan 8.15-13.15
 23 februari 2004, klockan 8.15-13.15") Karlstads universitet Institutionen för informationsteknologi Avdelningen för Statistik Tentamen i Statistik, STA A och STA A3 (9 poäng) 3 februari 4, klockan 85-35 Tillåtna hjälpmedel: Bifogad formelsamling
Karlstads universitet Institutionen för informationsteknologi Avdelningen för Statistik Tentamen i Statistik, STA A och STA A3 (9 poäng) 3 februari 4, klockan 85-35 Tillåtna hjälpmedel: Bifogad formelsamling
2014:2 RIKSFÖRENINGEN FÖR LÄRARNA I MATEMATIK, NATURVETENSKAP OCH TEKNIK
 ISSN 1402-0041 Utdrag ur 2014:2 RIKSFÖRENINGEN FÖR LÄRARNA I MATEMATIK, NATURVETENSKAP OCH TEKNIK Filip, Gustav, Tove och några klasskamrater från årskurs 5 på Byskolan i Södra Sandby arbetar med friktion
ISSN 1402-0041 Utdrag ur 2014:2 RIKSFÖRENINGEN FÖR LÄRARNA I MATEMATIK, NATURVETENSKAP OCH TEKNIK Filip, Gustav, Tove och några klasskamrater från årskurs 5 på Byskolan i Södra Sandby arbetar med friktion
Uppgift 1. Deskripitiv statistik. Lön
 Uppgift 1 Deskripitiv statistik Lön Variabeln Lön är en kvotvariabel, även om vi knappast kommer att uppleva några negativa värden. Det är sannolikt vår intressantaste variabel i undersökningen, och mot
Uppgift 1 Deskripitiv statistik Lön Variabeln Lön är en kvotvariabel, även om vi knappast kommer att uppleva några negativa värden. Det är sannolikt vår intressantaste variabel i undersökningen, och mot
Ubåtsnytt nr 7. 12-stegs behandling i kommunal och privat verksamhet. Kerstin och Bengt-Åke Armelius
 215-11-3 Ubåtsnytt nr 7 12-stegs behandling i kommunal och privat verksamhet. Vad tycker klienter och handläggare och hur går det för klienterna? I detta nummer beskrivs skillnader mellan 12-stegs behandling
215-11-3 Ubåtsnytt nr 7 12-stegs behandling i kommunal och privat verksamhet. Vad tycker klienter och handläggare och hur går det för klienterna? I detta nummer beskrivs skillnader mellan 12-stegs behandling
Facit till Några extra uppgifter inför tentan Matematik Baskurs. x 2 x 3 1 2.
 KTH Matematik Lars Filipsson Facit till Några extra uppgifter inför tentan Matematik Baskurs 1. Låt f(x) = ln 2x + 4x 2 + 9 + ln 2x 4x 2 + 9. Bestäm definitionsmängd och värdemängd till f och rita kurvan
KTH Matematik Lars Filipsson Facit till Några extra uppgifter inför tentan Matematik Baskurs 1. Låt f(x) = ln 2x + 4x 2 + 9 + ln 2x 4x 2 + 9. Bestäm definitionsmängd och värdemängd till f och rita kurvan
Bonusmaterial till Lära och undervisa matematik från förskoleklass till åk 6. Ledning för att lösa problemen i Övningar för kapitel 5, sid 138-144
 Bonusmaterial till Lära och undervisa matematik från förskoleklass till åk 6 Ledning för att lösa problemen i Övningar för kapitel 5, sid 138-144 Avsikten med de ledtrådar som ges nedan är att peka på
Bonusmaterial till Lära och undervisa matematik från förskoleklass till åk 6 Ledning för att lösa problemen i Övningar för kapitel 5, sid 138-144 Avsikten med de ledtrådar som ges nedan är att peka på
Lennart Carleson. KTH och Uppsala universitet
 46 Om +x Lennart Carleson KTH och Uppsala universitet Vi börjar med att försöka uppskatta ovanstående integral, som vi kallar I, numeriskt. Vi delar in intervallet (, ) i n lika delar med delningspunkterna
46 Om +x Lennart Carleson KTH och Uppsala universitet Vi börjar med att försöka uppskatta ovanstående integral, som vi kallar I, numeriskt. Vi delar in intervallet (, ) i n lika delar med delningspunkterna
LYFTIS lyft teknikämnet i skolan. Ett material för struktur i utveckling av skolans teknikämne.
 LYFTIS lyft teknikämnet i skolan Ett material för struktur i utveckling av skolans teknikämne. Cecilia Zachrisson, tekniklärare Gröndalskolan, Nynäshamns kommun: En F-9 skola Jag är ensam tekniklärare
LYFTIS lyft teknikämnet i skolan Ett material för struktur i utveckling av skolans teknikämne. Cecilia Zachrisson, tekniklärare Gröndalskolan, Nynäshamns kommun: En F-9 skola Jag är ensam tekniklärare
Concept Selection Chaper 7
 Akademin för Innovation, Design och Teknik Concept Selection Chaper 7 KPP306 Produkt och processutveckling Grupp 2 Johannes Carlem Daniel Nordin Tommie Olsson 2012 02 28 Handledare: Rolf Lövgren Inledning
Akademin för Innovation, Design och Teknik Concept Selection Chaper 7 KPP306 Produkt och processutveckling Grupp 2 Johannes Carlem Daniel Nordin Tommie Olsson 2012 02 28 Handledare: Rolf Lövgren Inledning
Optiska ytor Vad händer med ljusstrålarna när de träffar en gränsyta mellan två olika material?
 1 Föreläsning 2 Optiska ytor Vad händer med ljusstrålarna när de träffar en gränsyta mellan två olika material? Strålen in mot ytan kallas infallande ljus och den andra strålen på samma sida är reflekterat
1 Föreläsning 2 Optiska ytor Vad händer med ljusstrålarna när de träffar en gränsyta mellan två olika material? Strålen in mot ytan kallas infallande ljus och den andra strålen på samma sida är reflekterat
Observationer rörande omvandling av digitala yttäckande vektordata till rasterformat.
 GeoDataEnheten Kulturgeografiska Institutionen 106 91 Stockhlm Observationer rörande omvandling av digitala yttäckande vektordata till rasterformat. 1993 Stefan Ene INNEHÅLL Inledning Omvandling av koordinatsatta
GeoDataEnheten Kulturgeografiska Institutionen 106 91 Stockhlm Observationer rörande omvandling av digitala yttäckande vektordata till rasterformat. 1993 Stefan Ene INNEHÅLL Inledning Omvandling av koordinatsatta
Lektionsanteckningar 2: Matematikrepetition, tabeller och diagram
 Lektionsanteckningar 2: Matematikrepetition, tabeller och diagram 2.1 Grundläggande matematik 2.1.1 Potensfunktioner xmxn xm n x x x x 3 4 34 7 x x m n x mn x x 4 3 x4 3 x1 x x n 1 x n x 3 1 x 3 x0 1 1
Lektionsanteckningar 2: Matematikrepetition, tabeller och diagram 2.1 Grundläggande matematik 2.1.1 Potensfunktioner xmxn xm n x x x x 3 4 34 7 x x m n x mn x x 4 3 x4 3 x1 x x n 1 x n x 3 1 x 3 x0 1 1
RISKBEDÖMNING STORA BRÅTA, LERUM
 repo001.docx 2012-03-2914 UPPDRAGSNUMMER 1340010000 EN KVALITATIV RISKBEDÖMNING MED AVSEEENDE PÅ TRANSPORTER AV FARLIGT GODS INFÖR PLANERAD ETABLERING AV BOSTÄDER I STORA BRÅTA, LERUMS KOMMUN Sweco Environment
repo001.docx 2012-03-2914 UPPDRAGSNUMMER 1340010000 EN KVALITATIV RISKBEDÖMNING MED AVSEEENDE PÅ TRANSPORTER AV FARLIGT GODS INFÖR PLANERAD ETABLERING AV BOSTÄDER I STORA BRÅTA, LERUMS KOMMUN Sweco Environment
2014-09-16 KARTLÄGGNING AV MATEMATIKLÄRARES UTBILDNINGSBAKGRUND
 2014-09-16 KARTLÄGGNING AV MATEMATIKLÄRARES UTBILDNINGSBAKGRUND GENOMFÖRD VÅREN 2014 INOM RAMEN FÖR SKL MATEMATIK PISA 2015 2 (15) Innehållsförteckning Försättsblad sid 1 Innehållsförteckning sid 2 Sammanfattning
2014-09-16 KARTLÄGGNING AV MATEMATIKLÄRARES UTBILDNINGSBAKGRUND GENOMFÖRD VÅREN 2014 INOM RAMEN FÖR SKL MATEMATIK PISA 2015 2 (15) Innehållsförteckning Försättsblad sid 1 Innehållsförteckning sid 2 Sammanfattning
Lektion 1: Fördelningar och deskriptiv analys
 Density Lektion 1: Fördelningar och deskriptiv analys 1.,3 Uniform; Lower=1; Upper=6,3,2,2,1,, 1 2 3 X 4 6 7 Figuren ovan visar täthetsfunktionen för en likformig fördelning. Kurvan antar värdet.2 över
Density Lektion 1: Fördelningar och deskriptiv analys 1.,3 Uniform; Lower=1; Upper=6,3,2,2,1,, 1 2 3 X 4 6 7 Figuren ovan visar täthetsfunktionen för en likformig fördelning. Kurvan antar värdet.2 över
HMK. Remissversion. Terrester laserskanning. handbok i mät- och kartfrågor
 HMK handbok i mät- och kartfrågor Remissversion Terrester laserskanning 2015 Innehållsförteckning 1 Inledning... 4 2 Teknisk specifikation... 6 2.1 Allmän beskrivning... 6 2.2 Specifikation av arbetets
HMK handbok i mät- och kartfrågor Remissversion Terrester laserskanning 2015 Innehållsförteckning 1 Inledning... 4 2 Teknisk specifikation... 6 2.1 Allmän beskrivning... 6 2.2 Specifikation av arbetets
Utvändig färgsättning. Hur du lyckas med färgsättning av ditt hus.
 Utvändig färgsättning Hur du lyckas med färgsättning av ditt hus. Att färgsätta ditt eget hus är en både rolig och utmanande uppgift. Låt processen få ta den tid som krävs. Prova olika förslag och låt
Utvändig färgsättning Hur du lyckas med färgsättning av ditt hus. Att färgsätta ditt eget hus är en både rolig och utmanande uppgift. Låt processen få ta den tid som krävs. Prova olika förslag och låt
tidskrift för politisk filosofi nr 2 2006 årgång 10
 tidskrift för politisk filosofi nr 2 2006 årgång 10 Bokförlaget thales lönediskriminering och jämförbarhet av olika arbeten? en diskussion av fem argument för icke-jämförbarhet Stig Blomskog 1. Inledning
tidskrift för politisk filosofi nr 2 2006 årgång 10 Bokförlaget thales lönediskriminering och jämförbarhet av olika arbeten? en diskussion av fem argument för icke-jämförbarhet Stig Blomskog 1. Inledning
Öppna bilden C:\Photoshop5-kurs\Bananer 96ppi.psd. Aktivera verktyget Färgpyts i verktygslådan.
 140 Målnings- och redigeringsverktyg 3 Fyllningsverktyg Ofta vill man fylla ett helt område med en viss färg, ett visst mönster eller en övertoning mellan flera färger. Detta kan åstadkommas på några olika
140 Målnings- och redigeringsverktyg 3 Fyllningsverktyg Ofta vill man fylla ett helt område med en viss färg, ett visst mönster eller en övertoning mellan flera färger. Detta kan åstadkommas på några olika
Konsekvenser för Sverige av EU-kommissionens förslag på klimat-och energipolitiskt ramverk
 PM Nr 24, 2014 Konsekvenser för Sverige av EU-kommissionens förslag på klimat-och energipolitiskt ramverk Miljöekonomiska enheten 2014-01-31 Konjunkturinstitutet Dnr 4.2-2-3-2014 Konsekvenser för Sverige
PM Nr 24, 2014 Konsekvenser för Sverige av EU-kommissionens förslag på klimat-och energipolitiskt ramverk Miljöekonomiska enheten 2014-01-31 Konjunkturinstitutet Dnr 4.2-2-3-2014 Konsekvenser för Sverige
Inom fastigheten Lillhällom planeras för utbyggnad av det befintliga äldreboendet som finns inom fastigheten idag.
 REV 2014-04-22 Bakgrund Inom fastigheten Lillhällom planeras för utbyggnad av det befintliga äldreboendet som finns inom fastigheten idag. I dag är ca 35 % av fastighetens area hårdgjord, d.v.s. består
REV 2014-04-22 Bakgrund Inom fastigheten Lillhällom planeras för utbyggnad av det befintliga äldreboendet som finns inom fastigheten idag. I dag är ca 35 % av fastighetens area hårdgjord, d.v.s. består
T-test, Korrelation och Konfidensintervall med SPSS Kimmo Sorjonen
 T-test, Korrelation och Konfidensintervall med SPSS Kimmo Sorjonen 1. One-Sample T-Test 1.1 När? Denna analys kan utföras om man vill ta reda på om en populations medelvärde på en viss variabel kan antas
T-test, Korrelation och Konfidensintervall med SPSS Kimmo Sorjonen 1. One-Sample T-Test 1.1 När? Denna analys kan utföras om man vill ta reda på om en populations medelvärde på en viss variabel kan antas
Förhandling - praktiska tips och råd
 Förhandling - praktiska tips och råd Tänk på att informationen i detta material inte har uppdaterats sedan januari 2014. Aktuella lagar (inklusive beloppsgränser) har förändrats sedan dess och praxis på
Förhandling - praktiska tips och råd Tänk på att informationen i detta material inte har uppdaterats sedan januari 2014. Aktuella lagar (inklusive beloppsgränser) har förändrats sedan dess och praxis på
Slutliga normvärden för elnätsanläggningar i första tillsynsperioden 2012-2015
 2011:02 Slutliga normvärden för elnätsanläggningar i första tillsynsperioden 2012-2015 Inledning I enlighet med 9 förordningen (2010:304) om fastställande av intäktsram enligt ellagen (1997:857) ska elnätsföretagen
2011:02 Slutliga normvärden för elnätsanläggningar i första tillsynsperioden 2012-2015 Inledning I enlighet med 9 förordningen (2010:304) om fastställande av intäktsram enligt ellagen (1997:857) ska elnätsföretagen
Tentamen i Sannolikhetslära och statistik (lärarprogrammet) 12 februari 2011
 12 februari 2011") STOCKHOLMS UNIVERSITET MATEMATISK STATISTIK Louise af Klintberg Lösningar Tentamen i Sannolikhetslära och statistik (lärarprogrammet) 12 februari 2011 Uppgift 1 a) För att få hög validitet borde mätningarna
STOCKHOLMS UNIVERSITET MATEMATISK STATISTIK Louise af Klintberg Lösningar Tentamen i Sannolikhetslära och statistik (lärarprogrammet) 12 februari 2011 Uppgift 1 a) För att få hög validitet borde mätningarna
Studerandes sysselsättning 2015. YH-studerande som examinerades 2014
 Studerandes sysselsättning 2015 YH-studerande som examinerades 2014 Förord Utbildningar inom yrkeshögskolan ska tillgodose arbetslivets behov av kvalificerad arbetskraft. Det är därför angeläget att följa
Studerandes sysselsättning 2015 YH-studerande som examinerades 2014 Förord Utbildningar inom yrkeshögskolan ska tillgodose arbetslivets behov av kvalificerad arbetskraft. Det är därför angeläget att följa
BANBESÖKSRAPPORT Bolidens GK 2015-09-08
 BANBESÖKSRAPPORT 2015-09-08 Närvarande: Tomas Svahn Karl-Åke Johansson Boel Sandström Bankonsulent SGF Syfte med besöket Banbesök där vi resonerade kring gjorda skötselåtgärder under säsongen, samt undertecknad
BANBESÖKSRAPPORT 2015-09-08 Närvarande: Tomas Svahn Karl-Åke Johansson Boel Sandström Bankonsulent SGF Syfte med besöket Banbesök där vi resonerade kring gjorda skötselåtgärder under säsongen, samt undertecknad
Vägars och gators utformning
 Vägars och gators utformning E XEMPEL SAMLING VÄGMÄRK EN DEL 1 Tr af ik ve r ke t s p u b lik a tio n 20 12 : 20 0 A n lä g g nin g s s t y r nin g Titel: Vägars och gators utformning. Exempelsamling vägmärken,
Vägars och gators utformning E XEMPEL SAMLING VÄGMÄRK EN DEL 1 Tr af ik ve r ke t s p u b lik a tio n 20 12 : 20 0 A n lä g g nin g s s t y r nin g Titel: Vägars och gators utformning. Exempelsamling vägmärken,
Kontroll av variation i återväxttaxering i samband med kalibrering P5/7
 PM 1(19) Datum 2013-03-05 Enheten för geografisk information Lennart Svensson lennart.svensson@skogsstyrelsen.se Tfn 26131 Kontroll av variation i återväxttaxering i samband med kalibrering P5/7 Innehåll
PM 1(19) Datum 2013-03-05 Enheten för geografisk information Lennart Svensson lennart.svensson@skogsstyrelsen.se Tfn 26131 Kontroll av variation i återväxttaxering i samband med kalibrering P5/7 Innehåll
Tentamen'i'TMA321'Matematisk'Statistik,'Chalmers'Tekniska'Högskola.''
 Tentamen'i'TMA321'Matematisk'Statistik,'Chalmers'Tekniska'Högskola.'' Hjälpmedel:'Valfri'räknare,'egenhändigt'handskriven'formelsamling'(4''A4Esidor'på'2'blad)' och'till'skrivningen'medhörande'tabeller.''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''
Tentamen'i'TMA321'Matematisk'Statistik,'Chalmers'Tekniska'Högskola.'' Hjälpmedel:'Valfri'räknare,'egenhändigt'handskriven'formelsamling'(4''A4Esidor'på'2'blad)' och'till'skrivningen'medhörande'tabeller.''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''
Tentamen STA A10 och STA A13, 9 poäng 19 januari 2006, kl. 8.15-13.15
 Tentamen STA A10 och STA A13, 9 poäng 19 januari 2006, kl. 8.15-13.15 Tillåtna hjälpmedel: Ansvarig lärare: Räknedosa, bifogade formel- och tabellsamlingar, vilka skall returneras. Christian Tallberg Telnr:
Tentamen STA A10 och STA A13, 9 poäng 19 januari 2006, kl. 8.15-13.15 Tillåtna hjälpmedel: Ansvarig lärare: Räknedosa, bifogade formel- och tabellsamlingar, vilka skall returneras. Christian Tallberg Telnr:
Linjär regressionsanalys. Wieland Wermke
 + Linjär regressionsanalys Wieland Wermke + Regressionsanalys n Analys av samband mellan variabler (x,y) n Ökad kunskap om x (oberoende variabel) leder till ökad kunskap om y (beroende variabel) n Utifrån
+ Linjär regressionsanalys Wieland Wermke + Regressionsanalys n Analys av samband mellan variabler (x,y) n Ökad kunskap om x (oberoende variabel) leder till ökad kunskap om y (beroende variabel) n Utifrån
Utdrag ur protokoll vid sammanträde 2014-05-27
 1 LAGRÅDET Utdrag ur protokoll vid sammanträde 2014-05-27 Närvarande: F.d. justitieråden Susanne Billum och Severin Blomstrand samt justitierådet Kristina Ståhl. Tydlig prisuppgift vid taxiresor Enligt
1 LAGRÅDET Utdrag ur protokoll vid sammanträde 2014-05-27 Närvarande: F.d. justitieråden Susanne Billum och Severin Blomstrand samt justitierådet Kristina Ståhl. Tydlig prisuppgift vid taxiresor Enligt
Bedöma elevers förmågor i muntlig uppgift
 BEDÖMNINGSSTÖD I MATEMATIK Bedöma elevers förmågor i muntlig uppgift Innehåll Syftet med materialet sid. 2 Bedömning av muntliga prestationer i matematik sid. 2 Olika typer av bedömningssituationer sid.
BEDÖMNINGSSTÖD I MATEMATIK Bedöma elevers förmågor i muntlig uppgift Innehåll Syftet med materialet sid. 2 Bedömning av muntliga prestationer i matematik sid. 2 Olika typer av bedömningssituationer sid.
ELMIA 24-26 APRIL JÖNKÖPING 2015 24 26 APRIL 2015 JÖNKÖPING SE TILL ATT SYNAS! Reklamexponering under Elmia Vårsalong. http://www.elmia.
 ELMIA 24-26 APRIL JÖNKÖPING 2015 24 26 APRIL 2015 JÖNKÖPING SE TILL ATT SYNAS! Reklamexponering under Elmia Vårsalong http://www.elmia.se/polymer Se till att du syns! Mässan är ett fantastiskt forum för
ELMIA 24-26 APRIL JÖNKÖPING 2015 24 26 APRIL 2015 JÖNKÖPING SE TILL ATT SYNAS! Reklamexponering under Elmia Vårsalong http://www.elmia.se/polymer Se till att du syns! Mässan är ett fantastiskt forum för
Möjlig uppdatering av NVDB:s geometrier
 RAPPORT 9A Möjlig uppdatering av NVDB:s geometrier Jämförelse mellan NVDB och mobil laserskanning från ANDA Del av FoU-projektet Infrastruktur i 3D i samarbete mellan Innovation Norge, Trafikverket och
RAPPORT 9A Möjlig uppdatering av NVDB:s geometrier Jämförelse mellan NVDB och mobil laserskanning från ANDA Del av FoU-projektet Infrastruktur i 3D i samarbete mellan Innovation Norge, Trafikverket och
Diskret matematik: Övningstentamen 4
 Diskret matematik: Övningstentamen 22. Beskriv alla relationer, som är såväl ekvivalensrelationer som partiella ordningar. Är någon välbekant relation sådan? 23. Ange alla heltalslösningar till ekvationen
Diskret matematik: Övningstentamen 22. Beskriv alla relationer, som är såväl ekvivalensrelationer som partiella ordningar. Är någon välbekant relation sådan? 23. Ange alla heltalslösningar till ekvationen
Växtplanktonsamhället i Ivösjön mellan 1977 och 2007
 Växtplanktonsamhället i Ivösjön mellan 1977 och 2007 Susanne Gustafsson Limnolog Lunds universitet Bild 1. En kiselalg, av släktet bandkisel, har dominerat Ivösjöns växtplanktonsamhälle i 25 av de undersökta
Växtplanktonsamhället i Ivösjön mellan 1977 och 2007 Susanne Gustafsson Limnolog Lunds universitet Bild 1. En kiselalg, av släktet bandkisel, har dominerat Ivösjöns växtplanktonsamhälle i 25 av de undersökta
Valideringen har även på en övergripande nivå sett över ruttvalen i bilvägnätet.
 M4Traffic har fått i uppdrag av Trafikverket i Region Mälardalen att delta i arbetet med att validera ny basprognos avseende 2014 för region SAMM (exklusive Stockholm) och SYDOST (Östergötland) som ska
M4Traffic har fått i uppdrag av Trafikverket i Region Mälardalen att delta i arbetet med att validera ny basprognos avseende 2014 för region SAMM (exklusive Stockholm) och SYDOST (Östergötland) som ska
Uppdragsledare: Sophie Cronquist Sida: 1 av 12 2015-02-10 2015-02-23. Datum: Rev: Upprättad av: Sophie Cronquist Granskad av: Fredrik Johnson
 PM angående utbyggnad av befintlig parkering för detaljplan Ändring av detaljplan för fastigheten Uddared 1:63 m fl, Oscarshöjd, Lerums kommun, Västra Götalands län. Uppdragsledare: Sophie Cronquist Sida:
PM angående utbyggnad av befintlig parkering för detaljplan Ändring av detaljplan för fastigheten Uddared 1:63 m fl, Oscarshöjd, Lerums kommun, Västra Götalands län. Uppdragsledare: Sophie Cronquist Sida:
Konsoliderad version av. Styrelsens för ackreditering och teknisk kontroll (SWEDAC) föreskrifter och allmänna råd (STAFS 2006:10) om automatiska vågar
 föreskrifter och allmänna råd (STAFS 2006:10) om automatiska vågar") Konsoliderad version av Styrelsens för ackreditering och teknisk kontroll (SWEDAC) föreskrifter och allmänna råd (STAFS 2006:10) om automatiska vågar Ändring införd t.o.m. STAFS 2011:25 Tillämpningsområde
Konsoliderad version av Styrelsens för ackreditering och teknisk kontroll (SWEDAC) föreskrifter och allmänna råd (STAFS 2006:10) om automatiska vågar Ändring införd t.o.m. STAFS 2011:25 Tillämpningsområde
Skolkvalitetsmätning 2004
 Skolkvalitetsmätning 2004 Vara kommun Februari 2004 ARS P0504 Bastugatan 2. Box 38027. S-100 64 Stockholm Tel 08-462 95 05. Fax 08-462 95 20 e-mail: info@ars.se www.ars.se 1 INLEDNING 1.1 Bakgrund och
Skolkvalitetsmätning 2004 Vara kommun Februari 2004 ARS P0504 Bastugatan 2. Box 38027. S-100 64 Stockholm Tel 08-462 95 05. Fax 08-462 95 20 e-mail: info@ars.se www.ars.se 1 INLEDNING 1.1 Bakgrund och
Med publiken i blickfånget
 Med publiken i blickfånget Tidningsredaktioners arbete med publikundersökningar under 1930-1980-tal Ulrika Andersson 1 Författare: Ulrika Andersson Författaren Foto: JMG, Göteborgs universitet Tryck: Vulkan
Med publiken i blickfånget Tidningsredaktioners arbete med publikundersökningar under 1930-1980-tal Ulrika Andersson 1 Författare: Ulrika Andersson Författaren Foto: JMG, Göteborgs universitet Tryck: Vulkan
Avlösning som anhörigstöd
 Avlösning som anhörigstöd Viktiga faktorer som styr när anhöriga ska ta beslut om avlösning Pia Rylander och 2015-05-13 Arbetet har genomförts med hjälp av Utvärderingsverkstaden på FoU Sjuhärad Innehåll
Avlösning som anhörigstöd Viktiga faktorer som styr när anhöriga ska ta beslut om avlösning Pia Rylander och 2015-05-13 Arbetet har genomförts med hjälp av Utvärderingsverkstaden på FoU Sjuhärad Innehåll