STATISTISK ANALYS AV VARIATIONER I DATA FRÅN FLYGBUREN LASERSKANNING FÖR SKOGLIG INVENTERING FILIPPA ANDERÉN CENTRUM SCIENTIARUM MATHEMATICARUM
|
|
|
- Göran Bengtsson
- för 8 år sedan
- Visningar:
Transkript
1 STATISTISK ANALYS AV VARIATIONER I DATA FRÅN FLYGBUREN LASERSKANNING FÖR SKOGLIG INVENTERING FILIPPA ANDERÉN Examensarbete 212:E29 Matematikcentrum Matematisk statistik CENTRUM SCIENTIARUM MATHEMATICARUM

2 Förord Denna studie är ett examensarbete som avslutar min utbildning till civilingenjör i teknisk matematik vid Lunds Tekniska Högskola, LTH. Studien omfattar 3 hp och har skrivits för Sweco Position i Malmö, med förankring på institutionen för matematisk statistik, LTH. Jag vill passa på att rikta ett stort tack till Ulf Månsson, min handledare på Sweco, för samordning av kontakter och material så väl som allmän handledning under arbetets gång. Dessutom vill jag tacka min examinator och handledare, Johan Lindström, för vägledning och mycket värdefulla kommentarer på den matematiska delen av studien. Sist men inte minst vill jag rikta ett stort tack till Martin Sjödin, Blom Sweden, för hans engagemang och delgivande av kunskap inom laserskanning och skogliga beräkningar. 2

3 Sammanfattning På uppdrag av regeringen beslutades 27 att en ny nationell höjdmodell, NNH, ska upprättas av Lantmäteriet. Höjdmodellen ska baseras på data som samlats in genom ygburen laserskanning. Förutom höjdmodellen nns stor potential för laserdatan i andra sammanhang, däribland skoglig inventering. Den vanligaste metoden för att använda laserskanning som datafångst för inventering av skog är så kallad areal-baserad, där skogliga variabler från laserdatan passas till fältmätt data genom t.ex. regression. Utgångspunkten för denna studie är de skogliga variablerna som går att skatta från laserdata från insamlingen till NNH. I första delen av studien utreds robustheten i de skogliga variablerna med avseende på olika skannersystem och/eller ygriktning. Jämförelser mellan överlappande ygningar visar att det förekommer vissa systematiska skillnader i data från Leicas respektive Optechs system i vegetationskvot, dvs andelen laserträffar ovan 2 meter över marken, och olika höjdpercentiler av laserträar högre än 2 meter. Baserat på alla returer skattas vegetationskvoten ca, 1, 15 enheter högre om Optechs system används i jämförelse med Leicas. Om bara första returer tas med i jämförelsen försvinner väsentligen denna åtskillnad. Vad gäller höjdpercentilerna blir skattningarna istället större då Leicas system används, ca, 5 meter, i jämförelse med Optechs system. De systematiska skillnaderna försvinner inte då endast första returer tas med. Mellan två skanningar utförda med olika ygriktningar men med samma system hittas inga systematiska skillnader i varken vegetationskvot eller höjdpercentiler. I den andra delen av studien konstrueras en modell för eekten av ökad skannervinkel på vegetationskvoten, då Leicas system används. Överlag verkar en ökad skannervinkel ge en ökad vegetationskvot, dock skiljer sig sambanden avsevärt mellan testområdena. För vissa områden visas signikanta samband, där en skannervinkel på 2 grader vid tät skog skulle ge en ökad vegetationskvot på upp emot, 1, 2 enheter. För andra områden nns inget som tyder på en ökad vegetationskvot som följd av en större skannervinkel. 3

4 Abstract In 27, the swedish government decided to let the authority of land survey produce an updated height surface model with higher resolution. The data collection for the modelling is performed with airborne laser scanning, which in this form can be used in several other applications. One of these additional applications for the laser data is inventory of forest. The method most frequently used for this purpose is so called area-based, where variables from the laser data is tted to eld samples from the forest to predict values for the entire stand. The rst part contains an investigation of the robustness of frequently used laser variables for this application. By comparing four dierent datasets (two dierent scanning systems, each system with two separate ying directions) from the same area, the mean dierence and variance is studied. The result show that data from Optech gives estimates of the vegetation ratio, i.e. the proportion of laser hits above 2 metres from the ground, ca, 1, 15 units higher than data from Leica when all returns are included. When only rst returns are included, this distinction disappear. Concerning another important laser data variable, dierent percentiles of the height of the laser hits above 2 metres, the data from Leica gives estimations ca, 5 metres higher than Optech for all returns. These distinctions does not disappear when only rst returns are included. No systematical dierences is observed for data from dierent scanning directions. In the second part of the study, a model is constructed to describe the eect of a higher vegetation ratio as a result of an increased scanning angle. The result diers extensively between studied test areas. For some areas, the correlation is signicant, whereas for other areas, no signicant correlation is shown. 4

5 Innehåll 1 Inledning Bakgrund Ny Nationell Höjdmodell (NNH) Flygburen laserskanning Frågeställningar och mål Avgränsningar Skogliga skattningar från laserdata Areal-baserade skattningar med regressionsanalys Vegetationskvot Höjdpercentiler Laserskanning av skog Data 12 4 Metod Markmodell Testområden Systematiska skillnader och vinkelberoende Analys och resultat Vegetationskvot Percentiler Täthetsfunktion Modellering av vinkelberoende Slutsatser och diskussion 27 Referenser 29 A Ordlista 32 B FME 33 C Testområden 35 5

6 1 Inledning 1.1 Bakgrund I regeringens klimat- och sårbarhetsanalys från 27 utreddes behovet av en förbättrad nationell höjdmodell. Dagens aktuella modell har ett uppskattat medelfel i höjdled på 2, 5 m i ett grid med 5 meters upplösning (Regeringen, 27). Efter regeringens utredning ck Lantmäteriet i uppdrag att göra en ny heltäckande höjdmodell över Sveriges yta - Ny Nationell Höjdmodell (NNH). Behovet av den nya höjdmodellen är stort för användare i många olika sammanhang. Kraven varierar beroende på användningsområde, men den ständiga tekniska utvecklingen ställer ökade krav på höjdmodellens noggrannhet. Exempel på användning är automatisk produktion av ortofoton 1 som uteslutande sker med hjälp av digitala höjdmodeller (Lantmäteriet, 212b) Ny Nationell Höjdmodell (NNH) Kraven på NNH är ett medelfel i höjdled bättre än, 5 meter för ett grid på 2, 5 meter. Datainsamlingen inleddes år 29 och sker genom ygburen laserskanning, se avsnitt I skrivande stund är insamlingen till hälften färdigställd och beräknas vara klar under 213. På lantmäteriets hemsida läggs information fortlöpande upp om vilka områden som är skannade och vilka som återstår 2. Från början ställdes kravet att hela datainsamlingen skulle utföras under samma förutsättningar för hela landet, dvs samma tidpunkt för skanningen och samma skannersystem. Under projektets gång har kraven mildrats varför södra Sverige 3 nu ska skannas under tidig vår och höst, medan övriga Sverige är utan begränsningar för tidpunkten utöver väderförhållanden, som alltid bör vara goda. Två skannersystem utgör grundkapaciteten för datainsamlingen; Leica ALS6/14 och Leica ALS5-II/69. Vid behov har ytterligare fyra andra system använts, varav två av fabrikat Optech. Datainsamlingen genomförs i första hand som underlag för den nya höjdmodellen, men det nns fördelar med tekniken som möjliggör ytterligare användningsområden. Eftersom projektet är statligt nansierat har man i möjligaste mån eftersträvat att anpassa insamlingen för övriga användare. Ett exempel är skogsinventering, som behandlas i denna studie Flygburen laserskanning Den traditionella metoden för insamling av data till höjdmodeller är ygfotogrammetri, där två eller era bilder stereomatchas för att beräkna djup i ygbilder. Laserskanning är i vissa fall ett produktions- och kostnadseektivt alternativ till stereomatchning (Lantmäteriet, 29). Skanningen utförs genom att ett laserinstrument fästs under ett ygplan eller en helikopter. Instrumentet 1 Ett ortofoto är en geometriskt korrigerad ygbild. 2 Ny Nationell Höjdmodell - Planer och utfall: 3 Område A, B och C, se gur


7 Figur 1.1: Schematisk bild över hur laserskanning går till. Bilden kommer från (Lantmäteriet, 212a). skickar med hög frekvens ut laserpulser, se schematisk bild i gur 1.1. Ljuset i lasern är från det närainfraröda våglängdsområdet och eftersom all energi kommer från lasern kan skanning utföras även på natten. Vädret när skanningen utförs bör dock vara klart eftersom moln kan störa laserns väg genom luften. Genom att mäta tiden det tar för pulsen att returneras till sensorn erhålles information om var lasern har reekterats relativt ygplanets position. Satellitpositionering (GNSS) och tröghetsnavigering används för att hålla reda på var ygplanet be- nner sig. Ju kortare avståndet mellan ygplanet och närmaste GPS på marken är, ju bättre blir positioneringen och därmed laserträarnas noggrannhet (Lantmäteriet, 29). Precisionen vid ygburen laserskanning är på punktnivå 5 cm i höjd respektive 25 cm i sidled 4. Den slutgiltiga noggrannheten på en färdig produkt är starkt beroende av vilken sorts mark som skannats. För jämna och plana ytor erhålles mycket hög noggrannhet eftersom det är lätt att interpolera mellan punkterna. För ytor med t ex låg och tät vegetation eller branta bergsväggar kan noggrannheten bli betydligt sämre (Klang and Burman, 26). 1.2 Frågeställningar och mål Eftersom datainsamlingen till NNH är anpassad för den nya höjdmodellen tillhandahålls ingen kvalitetssäkring för tillämpning i andra sammanhang. Utgångspunkten för denna studie är en s.k. areal-baserade metod för skoglig inventering där samband mellan variabler i laserdata och skogliga värden uppmätta i fält skattas genom t.ex. regressionsanalys. I denna studie analyseras endast variationer och robusthet hos variablerna för en regressionsanalys, dvs inga skattningar av de skogliga värdena slutförs. 4 Burman, H. Titel. Blom Sweden AB. Stockholm. Personligt möte
 och tröghetsnavigering används för att hålla reda på var ygplanet be- nner sig.")
8 Den övergripande frågeställningen för studien är således hur skattningarna av variablerna från laserdata varierar om samma område skannas era gånger med samma förutsättningar. I NNH har dessutom olika system använts för datainsamlingen. Ger olika system upphov till systematiska skillnader, eller kan de anses likvärdiga? Lasern sprids med en svepande rörelse över markytan och har därmed möjlighet att täcka stora områden. En ökad vinkel bör dock ge en ökad sannolikhet att träa lövverk och annan vegetation eftersom lasern färdas en längre sträcka i luften. Hur mycket påverkar en högre vinkel variablerna från laserdata? Går det att modellera vinkelberoendet för just laserdata från NNH med given punkttäthet och skannervinkel? 1.3 Avgränsningar Under analysen av olika skannersystem jämförs endast system från Leica med system från Optech. Varje tillverkare har era modeller som kan vara olika i utformning och därmed ge upphov till skillnader, men i denna studie har skillnad endast gjorts mellan tillverkarna. Testområdena som använts i studien är inte kontrollerade mot skogsbruksplaner eller i fält. I avsnittet om modellering av vinkelberoende hade möjligen vissa skillnader mellan testområdena kunnat förklaras med olika skogstyper. Någon sådan information fanns inte att tillgå och har därför inte använts i studien. Klassning av marken har gjorts separat för varje dataset för att analysen ska bli så lik realistiska skogliga beräkningar som möjligt. Om olika markmodeller används kan detta eventuellt ge utslag i analysen på andra parametrar. Detta har inte analyserats vidare. I huvudsak har studien riktats in på att jämföra olika dataset för att leta efter systematiska skillnader och trender. Ibland har försök gjorts att förklara vad skillnaderna beror på genom enkla fysikaliska resonemang. Det förekommer dock inga djupare analyser av laserfysik eller skanningstekniker. 2 Skogliga skattningar från laserdata Det nns väsentligen tre metoder för skogsinventering baserade på laserdata varav två är beprövade i forsknings- och kommersiella sammanhang (Naesset, 212). Den första metoden är så kallad single-tree-baserad och kräver en hög punkttäthet i laserdata. Vid en sådan skanning kan varje träd enskilt analyseras eftersom den höga punkttätheten gör att man kan urskilja form och utseende på varje enskilt träd. Single-tree kräver en punkttäthet i storleksordningen 5-1 punkter per kvadratmeter (Naesset, 212). Den andra metoden, så kallad semisingle-tree, liknar single-tree men en korrigering görs med fältmätt data efter en indelning av beståndet i mindre, homogena ytor. Indelningen görs för att optimera platserna för provtagning (Breidenbach et al., 21). Den tredje metoden är så kallad areal-baserad och kräver betydligt lägre punkttäthet. Denna metod 8

9 är den mest använda kommersiellt och är väldokumenterad i forskningssammanhang. Vid en areal-baserad inventering erhålles ingen information om enskilda träd utan endast ett medelvärde för hela beståndet. Laserdata från NNH har punkttätheter på ca, 5 1 punkt per kvadratmeter och lämpar sig bäst för areal-baserade metoder. Det nns tre alternativ inom areal-baserade metoder som används för att skatta värden för hela beståndet; regression, k-msn och bayesiansk (Naesset, 212). I denna studie fokuseras på regressionsanalys för areal-baserade skattningar, nedan följer en mer ingående beskrivning av denna metod. 2.1 Areal-baserade skattningar med regressionsanalys Låt säga att det är av intresse att skatta massaslutenheten 5 i ett skogsbestånd. Om laserdata nns att tillgå kan en areal-baserad skattning genomföras. Inledningsvis mäts ett godtyckligt antal, n, provytor i fält upp som representerar beståndet väl. Massaslutenheten mäts manuellt för varje provyta. Värdet för varje provyta läggs i en vektor, Y, av längd n och kallas responsvariabel i linjär regression. Vidare försöker man hitta samband mellan responsvariabeln och information som kan hämtas från laserdatan, de förklarande variablerna. För varje provyta räknas k variabler ut från laserdatan som kan beskriva trädens massaslutenhet. Exempelvis kan trädens höjd och täthet ha betydelse, se underrubriker för utförligare beskrivning av vanligt förekommande variabler. Efter lokalisering av de fältmätta provytorna i laserdatan räknas alla k variabler ut för de n olika provytorna och läggs i matrisen X, dvs en matris av storlek n k. Vi söker därefter B för att hitta ett samband mellan responsvariabeln och de förklarande variablerna. Sambandet ges av där Y = XB + ɛ, Y = y 1 y 2. y n, 1 x 1, 1 x 1, 2 x 1, k 1 x 2, 1 x 2, 2 x 2, k X = 1 x 3, 1 x 3, 2 x 3, k x n, 2 x n, 2 x n, k, 5 Massaslutenhet betyder volym i förhållande till beståndets teoretiskt maximala produktionsförmåga (Jonsson, 1914). 9
.")
10 B = och ɛ N(, Iσ 2 ). B skattas med LS enligt Blom and Holmquist (1998) och ges av 6 B = ( X T X ) 1 X T Y. β β 1 β 2. β k För att skatta massaslutenheten för hela beståndet beräknas slutligen X- variablerna ur laserdatan för hela beståndet. Med hjälp av B erhålles således en skattning av hela beståndets massaslutenhet utan att behöva mäta allting för hand. Två grupper av förklarande variabler, som är vanligt förekommande i sammanhanget, har valts ut för analys, se t ex (Naesset, 22) och (Holmgren, 24) för mer ingående beskrivning på regressionsanalys för skogliga skattningar. I denna studie slutförs inte regressionen för de skogliga skattningarna, utan variationer i variablerna som ligger till grund för regressionen analyseras. Nedan beskrivs de variabler som använts Vegetationskvot För att uppskatta skogens täthet används andelen laserträar i vegetationen relativt marken som ett mått. Vanligen används andelen punkter ovanför någon gräns, t ex 2 meter över markytan. Gränsen införs dels för att försäkra sig om att laserträar på marken som förblivit oklassade inte räknas som träar i träden. Dels vill man utesluta stenar och låg vegetation från att räknas som skog, se t ex (Naesset, 1997) och (Nilsson, 1996) Höjdpercentiler Trädens höjd i ett bestånd är en viktig faktor i de esta skogliga sammanhang. Genom att analysera olika percentiler av höjderna kan man dels få en uppfattning om hur höga träden är, och dels om hur grenarna är distribuerade över trädets höjd. I denna studie används bara laserträar högre än 2 meter för percentilberäkningar, men i vissa fall kan tänkas att alla träar tas med. 2.2 Laserskanning av skog Utöver de vanliga felkällorna som beror på ojämn markyta, bör man vara extra uppmärksam när skog skannas. Nedan följer en beskrivning av faktorer som kan ha betydelse för skillnader i resultaten. 6 Om bruset är normalfördelat är ML-skattningen identisk. 1
 och (Holmgren, 24) för mer ingående beskrivning på regressionsanalys")
, men andra användare bör vara mer försiktiga (Lantmäteriet, 211).")
11 Det föreligger vissa skillnader mellan de olika systemen som används för datainsamlingen till NNH. Dessa har inte avgörande betydelse för höjdmodellen(rönnberg, 211), men andra användare bör vara mer försiktiga (Lantmäteriet, 211). En skillnad är skanningsmönstret, dvs distributionen av laserpulserna på marken (Petrie, 211), se gur 2.1. Leicas system ger en betydligt högre täthet ute i kanterna, där skannervinkeln är som störst. För registrering av returnerande ljus används i Leicas system s.k. automatic gain control (AGC) (Rost, 212). AGC används för att registrera er multipla returer genom att automatiskt justera förstärkningen av det inkommande ljuset (Vain, 21). Om energin i det inkommande ljuset är över den maximala nivån som kan registreras minskas förstärkningen och vice versa. Energin som registreras är beroende av reektiviteten hos marken som skannas. En tredje egenskap hos Leicas system är att styrkan i laserpulsen som sänds ut är starkare. I praktiken innebär detta att en högre pulsfrekvens görs möjlig eftersom lasern kräver tid att bygga upp energi mellan pulsarna (Rost, 212). Figur 2.1: Till vänster syns en schematisk bild över skanningsmönster från Optech och till höger från Leica. Bilden är hämtad från Petrie (211). Om lasern träar exempelvis tunnare löv kan multipla returer uppkomma, dvs en del av pulsen returneras när den träar objektet och resten fortsätter genom lövet och träar istället något annat under lövet. Träyta, dvs utbredningen på pulsen när den träar marken, är stor; max 1 meter i diameter för NNH. Multipla returer kan därmed också registreras när lasern delvis träar något och den andra delen fortsätter. Sensorn på ygplanet registrerar kontinuerligt ljus i samma våglängdsband (nära-infraröda) som laser sänts ut med. När en retur registreras syns en topp i vågformen som räknas om till tiden det tog för ljuset att återvända. Om multipla returer har uppkommit syns alltså era toppar i det registrerade ljuset. I specikationen för NNH anges att minst tre returpulser ska kunna registreras av sensorn i terräng bevuxen med vegetation 7. Glesare vegetation ger upphov till färre multipla returer. Eftersom Leicas system har starkare laser ökar sannolikheten för att penetrera löv och därmed registrerar er multipla returer. För kartläggning av markytan är detta en fördel då er markpunkter antagligen kommer att registreras. Användandet av AGC bidrar till att returer med svagt ljus, ex mörka ytor, ges möjlighet att registreras (Vain et al., 21), dock gör detta reglage att registrerad intensitet inte direkt kan 7 Fråga 11: 11
 (Rost, 212).")
12 jämföras mellan olika områden, där alltså förstärkningen är olika. Information om hur stor förstärkningen varit under skanningen sparas, så efter en kalibrering ges möjlighet att jämföra intensiteter mellan laserträarna (Vain, 21). Med öppningsvinkel eller skannervinkel avses vinkeln mellan lodlinjen och laserns väg i luften. Vissa system kan skanna upp till en absolut vinkel på 4 o (Lantmäteriet, 29). I specikationen för NNH anges en högsta tillåten absolut vinkel på 2 o8. Denna inställning är en avvägning mellan noggrannhet och eektivitet. För jämna ytor utan störande objekt bör höga skannervinklar inte ha någon betydelse, men är skog eller andra höga objekt i vägen får man vara mer försiktig. Med en stor skannervinkel kan täta träd eller andra täckande objekt stå i vägen och luckor kan uppstå i punkttäckningen på markytan. En ökad skannervinkel bör också leda till en ökad sannolikhet att träa lövverket eftersom lasern färdas en längre sträcka i luften. Eekten av detta bör vara en överskattning av vegetationskvoten. Samtidigt vill man eftersträva eektivitet i datainsamlingen och ju större svepbredd som används desto färre ygstråk behövs. Av praktiska skäl skannas inte alla områden med samma ygriktning, avvikelser sker främst längs kusten. I NNH skannas marken antingen nordsydlig respektive östvästlig riktning, vilket möjligen kan ge eekter i laserdatan. Exempelvis kan man tänka sig att löv riktar in sig i solens riktning, vilket rimligen också bör öka sannolikheten för laserträar i lövverket. 3 Data I en leverans av NNH-data från Lantmäteriet tillhandahålls två produkter; dels höjddata i rasterformat och dels punktmoln med data från laserskanningen. Höjddata är ett raster som beskriver markens höjd i ett 2 meter grid med en uppskattad noggrannhet på, 5 meter i höjdled. Punktmolnet ska ha en minsta täthet på.5 1 pkt /m 2, men tack vare multipla returer erhålles ofta en betydligt högre punkttäthet än så. I denna studie har endast punktmolnen använts för analys. Inför NNH delades Sveriges yta in i 9 produktionsområden (A-I), se gur 3.1. Varje produktionsområde är därefter indelade i 3 5 skanningsområden. Varje skanningsområde är typiskt en stående rektangel om 5 km 25 km. Runt Sveriges kust och i ränderna mellan produktionsområdena är skanningsområdena anpassade efter behov och kan då anta andra former. Varje skanningsområde delas sedan in i rutor om 2, 5 km 2, 5 km, vilket är formatet för leverans, se gur 3.1. Inom ett skanningsområde ska samma system för skanning användas och målsättningen är att skanningen ska ske under så kort tid som möjligt, i regel under ca en vecka. Dock är skanningen väderberoende, varför perioden kan variera från en månad till i extrema fall mycket längre tid 9. Om fel upptäcks i ett senare skede kan hela skanningsområden dessutom behöva skannas om. 8 Fråga 11:


13 Figur 3.1: NNH's leveransformat De esta skanningsområdena är skannade i ca 2 parallella ygstråk i nordsydlig riktning. I fortsättningen kallas ett sådant ygstråk N-S. Varje skanningsområde har utöver parallellstråken i regel även tre ygstråk som är skannade i östvästlig riktning, hädanefter kallade V-Ö. Dessa nns vanligen högst upp, längst ned och någonstans i mitten (placeringen kan variera) i skanningsområdet. I gur 3.2 visas punkttäckningen för ett helt skanningsområde, där tvärstråken blir tydliga. I gur 3.3 syns ett exempel på hur ett punktmoln kan se ut, visualiserat i olika vyer. Förutom 3D-bilden som ett punktmoln möjliggör ges även information om varje enskild laserträ. Varje punkt har en SWEREF 99 TM och en z -koordinat (x, y)-koordinat som ges i formatet som anges i RH2. Dessutom lagras följande information i varje punkt (Lantmäteriet, 212c): Klasstillhörighet (mark, vatten eller oklassi cerad) Id som anger vilket ygstråk punkten tillhör Om laserpulsen givit upphov till multipla returer anges vilken i ordningen punkten är Skannervinkel Intensitet från laserreturen 4 Metod 4.1 Markmodell Koordinatsystemet för NNH i höjdled anges i RH2, där nollnivån de nieras 1. Eftersom marken därför inte har höjden av Normaal Amsterdams Peil (NAP) måste höjden för laserreturerna som trä at vegetationen räknas ut relativt

14 Figur 3.2: Täckningen av ygstråken i ett skanningsområde. Blå fält representerar högre täthet och gröna fält lägre täthet. De blå smala strecken i vertikelled betyder att där nns överlapp mellan ygstråken. Svarta områden representerar utebliven punkttäckning vilket kan uppkomma vid sjöar, där returer sällan registreras. markens höjd i det angivna koordinatsystemet. För att avgöra avståndet mellan marken och varje punkt används en modell av marken som referens. En markmodell är ju huvudanledningen för datainsamlingen i NNH, och ett alternativ hade varit att direkt använda höjdmodellen som referenspunkt. Eftersom studien går ut på att jämföra två olika dataset utformades ett mer trovärdigt alternativ där en separat markmodell skapas för varje dataset. Genom att utgå från de markklassade punkterna från punktmolnet interpolerades en markyta med hjälp av programvaran FME. Höjden för varje punkt har därefter, separat för de olika dataseten, räknats om som höjden relativt markmodellerna. I bilaga B beskrivs arbetet i FME. Eftersom markmodellen är en interpolation mellan markpunktern är det inte ovanligt att låga punkter får en negativ höjd om den avviker från de omkringliggande punkterna. I skogliga sammanhang är man inte intresserad av lägre vegetation utan skiljer endast på laserträar i träden respektive annat. När variablerna från laserdata räknas ut, se avsnitt 2.1, används därför en höjdgräns på 2 meter. Detta exkluderar punkterna med negativ höjd, vilket följaktligen inte utgör något problem. 4.2 Testområden Utgångspunkten för val av testområden är att området ska ha skannats era gånger, vilket är aktuellt längs med kanterna i ett skanningsområde samt i överlapp mellan ygstråk, se gur 3.2. Sidoövertäckningen mellan alla ygstråk ska överlappa varandra med minst 2 meter 11 vilket möjliggör val av testområde. Dels nns överlapp inom ett skanningsområde, där möjlighet ges att jämfö- 11 Fråga 11, 14


15 Figur 3.3: Laserpunktmoln i NNH's leveransformat, 2, 5 km 2, 5 km, visualiserat i programvaran FugroViewer. Rektangeln i det vänstra hörnet är testområde 5, se avsnitt 4.2 och bilaga C. Färgkodningen är baserad på höjd. 15


16 Figur 3.4: Till vänster i guren syns punktmolnet från gur 3.3 inzoomat över en mindre yta. Nere till höger i guren syns en 3D-vy, där det går att urskilja träd i punktmolnet. För dessa är färgkodningen baserad på höjd. Över till höger syns en prolvy där formen på två träd blir tydligare. Färgkodningen representerar markpunkter respektive oklassade punkter. 16

17 ra skanningar mellan parallellstråk där samma system har använts. Dessutom innehåller varje skanningsområde tre tvärstråk, där jämförelse kan göras mellan skanningar med hela skalan av skannervinklar, men återigen med samma system. Dels nns också överlapp mellan angränsande skanningsområden, som inte innefattas av kravet att samma system måste användas. Strategin för att välja ut testområden har varit att välja områden längs kortsidorna där överlapp nns mellan parallellstråk och tvärstråk för skanningen inom skanningsområdet, men dessutom parallellstråk och tvärstråk från sidoövertäckning från angränsande skanningsområde. Resultatet av ett sådant område är att fyra skanningar erhålles, där de första två är skannade med ett system och de andra två med det andra. Testområdena, totalt 18 stycken, har valts ut efter att punktmolnen visualiserats i programvaran FugroViewer. Denna programvara gör det möjligt att titta på laserdatan i 3D med olika färgläggningsverktyg och prolvyer. Områdena innehåller vad som ansetts vara relativt tät och homogen skog. I vissa fall innehåller testområdena mindre stigar vilket varit svårt att undvika. Alla testområden är rektangulära och har storlekar mellan ca 1 meter i minsta sida till ca 72 meter i längsta sida. Figur 3.3 visar ett exempel på ett testområde visualiserat i FugroViewer. I bilaga C visas placering och koordinater för samtliga testområden. Eftersom testområdena är varierande i storlek och ganska få till antalet delas för vissa delar av analysen varje testområde in i kvadrater om ca 2 m 2 m. Kvadraterna kallas i fortsättningen testrutor. 4.3 Systematiska skillnader och vinkelberoende I den inledande delen av analysen klipptes testområdena ut ur laserdatan. För var och en av de fyra dataseten gjordes en markmodell som användes för att räkna ut varje laserträs avstånd till markytan. För att kunna jämföra de olika testområdena för de olika skanningstillfällena räknades sedan de förklarande variablerna ut dels för testrutorna och dels för testområdena för samtliga dataset. Eftersom varje testområde är skannat fyra gånger kan både skillnad i skannersystem och ygriktning analyseras över samma område. Dessutom ges möjlighet att undersöka om höga skannervinklar kan ge ökad vegetationskvot eller höjdpercentiler eftersom både låga och höga skannervinklar nns med i testområdena. 5 Analys och resultat 5.1 Vegetationskvot För att få en första uppfattning om hur stor skillnad ygriktning och användande av olika skannersystem ger upphov till räknas vegetationskvot ut för alla testrutor inom ett testområde för var och en av de fyra dataseten. Eftersom testområdena inte är helt homogena, dvs vegetationskvoten varierar mellan test- 17

18 områdena inom samma testområde, jämförs dataseten lättare om medelvärdet mellan de fyra skanningarnas vegetationskvot dras bort från varje serie. I - gur 5.1 syns avvikelserna från medelvärdet för testområde 2, se bilaga C. I den övre bilden syns tydligt en systematisk skillnad då olika system använts. Däremot är skillnaderna avsevärt mindre då samma system använts. Utöver medelskillnaden ges dessutom en uppfattning om hur stor variansen kan vara, dvs hur stora avvikelser som rimligen kan förväntas för enheter om 2m 2m. I den undre bilden är bara första returer analyserade, och den tydliga systematiska skillnaden är borta. Till vänster i bilden skönjas Leica N-S avvika lite med en lägre vegetationskvot. Någonstans i mitten syns Optech N-S eventuellt ligga lite under de övriga. Vegkvot(i,k) mean(vegkvot(i,:)) Vegkvot(i,k) mean(vegkvot(i,:)) Skillnader i vegetationskvot m kvadrat Leica N S Skillnader i vegetationskvot, bara första returer Leica V Ö.1 Optech N S Optech V Ö m kvadrat Figur 5.1: Avvikelser från medelvärde i vegetationskvot för fyra olika dataset. Varje stjärna och färg motsvarar en testruta och skanning. Övre: Alla returer. Undre: Endast första returer. Anledningen till den anmärkningsvärda iakttagelsen om en så pass tydlig systematisk skillnad mellan de olika systemen när alla returer analyseras tros ha förklaringen i skillnaden i intensitet hos lasern. Leicas system har en starkare laser vilket bör öka sannolikheten för multipla returer och därmed öka sannolikheten att träa marken istället för lövverket. En ökad andel markträar innebär att vegetationskvoten minskar i förhållande till då Optechs system används, vilket skulle förklara resultaten. När istället endast första returer analyseras spelar styrkan i lasern ingen roll, eftersom de extra multipla returerna inte tas med. De små avvikelserna i den undre bilden, gur 5.1, är svåra att binda till någon fysikalisk förklaring. Det är välkänt att små avvikelser kan uppkomma vid olika väderförhållanden, t ex vind och luftfuktighet. I denna studie är testområdena utvalda så att skanningstillfällena ska ligga nära varandra i tid, i gur

19 kommer skanningarna från hösten och skillnaden mellan dem är 2 6 veckor. Det är därmed inte heller omöjligt att små förändringar i skogen kan ha skett mellan de olika tidpunkterna, även om ingen av testområdena i denna studie är skannade under vegetationssäsong. Det ovan analyserade testområdet representerar samtlig testdata väl, även om vissa skillnader i storlek förekommer. I gur 5.2 nns ett sammanfattande diagram över medelskillnader mellan dels olika skannersystem, och dels olika ygriktningar för samma system. Vad som observerades för ett enskilt testområde i analysen ovan verkar vara representativt för alla testområden. Den tredje och fjärde lådan visar att Optechs system systematiskt skattar vegetationskvoten högre än Leicas. Medelskillnaden är i storleksordningen, 1, 15 enheter, vilket kan anses relativt stort eftersom vegetationskvot är en andel och antar värden mellan och 1. Dessutom visar sig iakttagelsen om att endast första returer tar bort denna systematiska skillnad också vara representativ för alla områden. Sjunde och åttonde lådan visar visserligen på något större varians än skillnaden mellan olika ygriktningar, men de stora systematiska avvikelserna är borta. Sammanfattning för medelskillnader i vegetationskvot för alla testområden Enhet vegetationskvot Flygriktn, L Flygriktn, O Skanner, N S Skanner, V Ö L, första O, första N S, första V Ö, första Figur 5.2: Sammanfattande statistik för samtliga testområden. Första lådan representerar skillnaden mellan att yga N-S och V-Ö för Leicas skannersystem, andra lådan motsvarande för Optech. Ett positivt värde betyder en högre vegetationskvot för ygning N-S och motsvarande negativt värde en högre vegetationskvot för ygning V-Ö. Med tredje och fjärde lådan visas medelskillnader mellan olika skannrar, vardera med olika ygriktningar. Ett positivt värde betyder en högre vegetationskvot för Leicas skannersystem och motsvarande ett negativt värde en högre vegetationskvot för Optechs. De fyra sista lådorna representerar samma som de första fyra, fast endast första returer. 19

20 5.2 Percentiler För att få en känsla för storleksordningen på skillnaderna i höjdpercentiler mellan dataseten har samma analys gjorts med testområdet som för vegetationskvot ovan. I gur 5.3 syns en bild över de fyra dataseten med avvikelser från medelvärde i varje testruta för percentil 4 och 95 med alla respektive endast första returer. Serierna ser ut att vara skiktade i två lager vilket innebär systematiska skillnader mellan de olika skannersystemen för både percentil 4 och 95. Till skillnad från vegetationskvoterna försvinner inte skillnaderna när endast första returer tas med och det är svårt att avgöra om skillnaderna ökar eller minskar. Resonemanget om Leicas starkare laser som lättare går igenom löven håller därmed inte i detta fall för att förklara skillnaderna. Perc4(i,k) mean(perc4(i,:)) Perc4(i,k) mean(perc4(i,:)) Skillnader i höjdpercentil 4, alla returer m kvadrat Skillnader i höjdpercentil 4, bara första returer Perc95(i,k) mean(perc95(i,:)) Perc95(i,k) mean(perc95(i,:)) Leica N S 2 Leica V Ö Optech 35 N S 2m kvadrat Optech V Ö Skillnader i höjdpercentil 95, alla returer m kvadrat Skillnader i höjdpercentil 95, bara första returer m kvadrat Figur 5.3: Avvikelser från medelvärde i percentil 4 och 95 för fyra olika dataset. Varje stjärna och färg motsvarar en testruta och skanning. Överst: Alla returer. Underst: Endast första returer. För att få en helhetsbild över hur dessa systematiska skillnader ser ut överlag har sammanfattande statistik gjorts även för percentilvariablerna. I gur 5.4 syns låddiagram över percentilerna 2, 4, 6, 8, 9, 95 samt 99. Bilderna visar att Leicas system systematiskt skattar högre värden för percentilerna än Optech och att eekten inte försvinner om man endast analyserar första returer. Storleksordningen på skillnaderna är ca, 5 meter för samtliga percentiler. 2

21 Sammanfattning för medelskillnader i percentil 2 för alla testområden. 2.5 Sammanfattning för medelskillnader i percentil 4 för alla testområden Fl.rikt, L Fl.rikt, OSk., N SSk., V Ö L, f.r O, f.r N S, f.r V Ö, f.r Fl.rikt, L Fl.rikt, OSk., N SSk., V Ö L, f.r O, f.r N S, f.r V Ö, f.r Sammanfattning för medelskillnader i percentil 8 för alla testområden. Sammanfattning för medelskillnader i percentil 9 för alla testområden Fl.rikt, L Fl.rikt, OSk., N SSk., V Ö L, f.r O, f.r N S, f.r V Ö, f.r Fl.rikt, L Fl.rikt, OSk., N SSk., V Ö L, f.r O, f.r N S, f.r V Ö, f.r Sammanfattning för medelskillnader i percentil 95 för alla testområden Fl.rikt, L Fl.rikt, OSk., N SSk., V Ö L, f.r O, f.r N S, f.r V Ö, f.r Sammanfattning för medelskillnader i percentil 99 för alla testområden Fl.rikt, L Fl.rikt, OSk., N SSk., V Ö L, f.r O, f.r N S, f.r V Ö, f.r Figur 5.4: Sammanfattande statistik för samtliga testområden. De två första lådorna i varje bild representerar ygriktning för Leica respektive Optech. Positivt värde betyder högre percentil för N-S och negativt värde betyder högre percentil för V-Ö. Tredje och fjärde lådan i varje bild representerar skillnader mellan skannersystem. Positivt värde betyder högre percentil för Leica och motsvarande negativt värde betyder högre percentil för Optech. De fyra sista lådorna i varje bild representerar samma sak, fast endast första returer. Motsvarande gur för percentil 6 följer samma mönster. 21
22 .1 Täthetsfkn, alla returer.9 Täthetsfkn, bara första returer.9.8 Leica N S Leica V Ö Optech N S Optech V Ö Gräns VK 2m Sannolikhet Sannolikhet Höjd över marken (meter) Höjd över marken (meter) Figur 5.5: Skattade täthetsfunktioner av testområde 2 för fyra olika skanningar. Bilden till vänster innehåller alla returer och bilden till höger endast första returer. 5.3 Täthetsfunktion För att få en överblick över hur resultaten i vegetationskvot och percentiler uppstår användes MatLab's funktion ksdensity för att skatta täthetsfunktionen för laserträarnas höjd över markytan. I gur 5.5 syns täthetsfunktionen för de fyra skanningarna av testområde 2, se bilaga C. Till vänster i båda bilderna nns en spets vilken motsvarar sannolikheten att träa mark och låg vegetation. Till höger syns en större båge, där toppens läge i x-led markerar var de esta laserträarna i trädens lövverk hamnat, dvs på ca 15 meter. Den röda linjen i - guren markerar gränsen 2 meter över markytan, och massan till höger om linjen motsvarar vegetationskvoten. I den vänstra bilden är alla returer inkluderade medan den högra endast innehåller första returer. I den vänstra bilden syns det tydligt att de två skanningarna med Optech får betydligt högre sannolikhet att träa vegetationen i träden eftersom bågen till höger är högre för dessa skanningar. Följaktligen är spetsen till vänster lägre vilket innebär lägre sannolikhet att få markträar. Detta är förklaringen till varför Optechs skannrar får högre värden på vegetationskvoten än Leicas skannrar. I den högra bilden syns också att när endast första returer tas med i analysen försvinner denna eekt och alla fyra täthetsfunktioner blir mer lika. I tabell 1 syns värden på vegetationskvoten för de fyra skanningarna med alla respektive endast första returer. I detta testområde är skillnaden ca, 2 enheter när olika skannrar används och alla returer tas med. 22
23 Skanning Vegetationskvot, alla returer Vegetationskvot, endast första returer Leica N-S, 643, 818 Leica V-Ö, 629, 827 Optech N-S, 825, 814 Optech V-Ö, 825, 825 Tabell 1: Tabell över vegetationskvoter efter skanning av testområde 2. Datan är från fyra skanningar med alla respektive endast första returer. 5.4 Modellering av vinkelberoende Tidigt i studien misstänktes att höga skannervinklar på något sätt skulle ge utslag i data. I gur 5.8 visas beroendet mellan dierens i vegetationskvot och skannervinkel. Trots en hög varians syns tydligt en positiv trend mellan absolut skannervinkel och en ökad vegetationskvot. Ett försök har gjorts att modellera vinkelberoendet för samtliga testområden med linjär regression. Med utgångspunkt i beteckningarna från avsnitt 2.1, motsvaras responsvariabeln av dierens i vegetationskvot och de förklarande variablerna av skannervinkeln. Eftersom skogens täthet kan tänkas ge ökade vinkeleekter har medelvärdet mellan skanningarna för varje ruta dessutom tagits med i modellen y i = β + β 1 θ 1, i V K i + β 2 θ 2, i V K i, där y i är dierensen i vegetationskvot för testruta i, β k är regressionsparametrarna, θ k, i är medelvärdet av alla laserträars skannervinkel i testruta i med system k samt V K i är medelvärdet för de båda skannrarnas vegetationskvot för testruta i. Eftersom medelskillnader mellan samma instrument, men framförallt mellan olika instrument verkar föreligga tas β med i modellen för att låta olika skannrar vid skannervinkel kunna vara annat än noll. Endast data från Leicas skannersystem har analyserats. MatLab's funktion regress har använts för att skatta parametrarna β k. I gur 5.7 syns skattningar med intervall för parametrarna β 1 och β 2. De esta skattningarna är positiva och intervallen täcker för de esta testområden inte noll. Det nns därmed fog för att påstå att en ökad skannervinkel ger upphov till en ökad vegetationskvot. Dock stämmer skattningarna från olika testområden dåligt överens med varandra, vilket gör det svårt att hitta något allmänt samband. Vissa testområden visar tydligt signikanta vinkelberoenden medan andra inte visar tecken på något beroende alls. Värt att notera är att testområdena endast är utvalda efter en visuell analys av punktmolnen, och ingen information om träslag, ålder osv nns därmed att jämföra med. Intuitivt kan man tänka sig att exempelvis indelningen lövträd respektive barrträd skulle kunna ge skillnad, men några kluster i skattningarna som skulle bekräfta detta är svåra att identiera. 23
24 Differens vegetationskvot Differens vegetationskvot Skannervinkel Leica N S Skannervinkel Leica V Ö Differens vegetationskvot Differens vegetationskvot Skannervinkel Optech N S Skannervinkel Optech V Ö Figure 5.6: I bilderna visas beroende mellan skannervinkel och dierens i vegetationskvot. Den övre bilden till vänster innehåller vinklar från Leica N-S varför en ökad absolut vinkel ger högre dierens i vegetationskvot. Motsvarande gäller den övre bilden till höger som innehåller vinklar från Leica V-Ö, där en ökad absolut vinkel ger lägre dierens i vegetationskvot. I de undre bilderna visas motsvarande testområde fast för skanningar från Optech. 24
25 .15 Skattade intervall för regressionskoefficient i vinkelberoende. β för Leica N S Testområde β för Leica V Ö Testområde Figur 5.7: Skattningar med 95-procentigt kondensintervall för parametrarna i regressionsanalysen. Den övre bilden representerar skannervinkel från Leica N-S och den undre Leica V-Ö. Även andra modeller med er parametrar och andra förklarande variabler har testats. En modell utan medelvärde för vegetationskvot gav signikanta β j, men bättre resultat fås om de tas med. Dessutom testades y i = β + θ 1, i ( β1 V K i + β 2 ) + θ2, i ( β3 V K i + β 4 ) för att låta skannervinkeln ha en egen parameter utan inverkan från medelvärde i vegetationskvot. Denna modell gav inga signikanta β (utom intercepten, dvs β ) och förkastades därmed. För att få en uppfattning om vilka konsekvenser vinkelberoendet skulle få, uttryckt i vegetationskvot, har ett diagram skapats för att illustrera sambandet. I gur 5.8 kan avläsas hur stor ökning av vegetationskvoten en given skannervinkel skulle ge för de olika skattningarna. Eftersom skattningen av β skilde sig så mycket mellan de 18 testområdena nns alla med i guren. Dessutom nns medelvärdet för vegetationskvoten med i modellen varför två olika alternativ på vegetationskvoter också nns med. Spridningen är som sagt mycket stor mellan testområdena varför också konsekvensen av dem varierar mycket. Om man endast tittar på de röda linjerna, dvs för vegetationskvot på ca, 9, ger den lägsta skattningen på β väldigt liten inverkan. Däremot, för det mest extrema fallet ger en skannervinkel på 2 grader en ökad vegetationskvot med, 17 enheter. Notera att detta scenario inte är ett extremt fall i ett intervall, utan bästa skattningen av β för ett av testområdena Testområde 5, som också är exemplet i början av detta avsnitt. 25
26 Skattat samband mellan skannervinkel och ökning av vegetationskvot för alla testområden..18 Vegetationskvot:,5.16 Vegetationskvot:,9.14 Ökning vegetationskvot Skannervinkel Skattat samband mellan skannervinkel och ökning av vegetationskvot för alla testområden..16 Vegetationskvot:,5 Vegetationskvot:, Ökning vegetationskvot Skannervinkel Figur 5.8: Samband mellan skannervinkel och ökad vegetationskvot. Röda linjer motsvarar ökningen för de 18 testområdenas skattningar för vegetationskvoten,9. De blåa linjerna motsvarar ökningen vid vegetationskvoten,5. Den övre bilden representerar skattningarna från26 skanning N-S och den undre bilden V-Ö. Båda skanningarna är utförda med Leicas system.
27 6 Slutsatser och diskussion Eftersom data till denna studie kommer från NNH, vars datainsamling är anpassat efter annat ändamål än vad som analyseras i denna studie, måste man vara medveten om begränsningarna. En lägre punkttäthet ger naturligtvis större varians på skattningarna och i slutändan lägre noggrannhet på de skogliga skattningarna. Att variansen är stor medför att man inte kan vara lika säker på medelskillnader som uppträder i jämförelserna. I fallet med vegetationskvot försvann skillnaderna mellan instrumenten då endast första returer analyseras. Denna iakttagelse bör öka tillförlitligheten i påståendet att Optechs skannersystem skattar vegetationskvot högre än Leicas eftersom fenomenet möjligen har en fysikalisk förklaring i skillnad i intensitet hos lasern. Däremot bör man vara mer försiktig med att dra slutsatser angående iakttagelsen med skillnaderna i höjdpercentilerna, där den fysikaliska förklaringen för författaren fortfarande är okänd. Innan någon fysikalisk förklaring tillkännages utesluts inte möjligheten att något blivit fel i modelleringen eller analysen som kan vara orsaken till skillnaden. En möjlighet till stor felkälla nns i modelleringen av marken. Inom ramen för denna studie fanns inte utrymme att jämföra de olika markmodellerna för olika dataset eller säkerställa noggrannhet och utreda felkällor. Rönnberg (211) har skrivit ett PM där två markmodeller baserade på olika skanningar med olika skannrar jämförs. I allmänhet uppvisar de båda skanningarna likvärdiga resulterande markmodeller även om vissa lokala avvikelser inte är ovanliga. I regel förklaras de största avvikelserna med ojämna markytor eller låg tät vegetation som felaktigt klassats som mark. Skogsområden är ett vanligt exempel för då markmodellen kan få sämre noggrannhet, varför denna studie kan ha påverkats negativt av osäkerheten i markmodellen. Dessutom har programvaran FME direkt använts för att skapa markmodeller utifrån de markklassade punkterna. En ytterligare felkälla i detta är att en omklassning av laserpunkterna har gjorts utan kvalitetssäkring från Lantmäteriet som annars tillhandahålls. Detta för att tvärstråken som använts för överlapp till en början inte var klassicerade. Å ena sidan kan man förmoda att inga systematiska skillnader bör uppstå av den typen av felkällor, utan bara högre varians. Å andra sidan gäller detta skillnader mellan olika skannrar, där möjligen olika egenskaper kan vara orsaken till systematiska fel i just markmodellen. Utredning av markmodellering av detta slag samt fysikaliska förklaringar till resultaten lämnas till vidare studier. En stor generalisering som gjorts i studien gäller sammanslagningen av olika modeller av skannersystem inom samma fabrikat. Begränsningen till skogsområden med överlapp av både tvärstråk och angränsande skanningsområde med lämpligt system är anledningen till att denna generalisering gjorts. Jämförelse mellan olika modeller av samma fabrikat lämnas till vidare studier. Höjden vid positionen i x-led för det lokala minimum mellan spetsen och bågen har en låg sannolikhet och motsvarar antagligen glappet mellan vegetationen på marken och vegetationen i träden. För många testområden ser detta lokala minimum ut att vara förskjutet något till höger om gränsen för 2 meter. Optimalt hade varit om denna gräns dragits precis genom det lokala minimat. 27
28 Man ska dock vara väl medveten om att täthetsfunktionen är skattad och utjämnad med hjälp av funktionen ksdensity. Ett histogram visar mer sanningsenligt hur fördelningen ser ut, men där är istället svårt att utläsa vad som skiljer dem åt på grund av oregelbundenheten. 28
29 Referenser Blom, G., Holmquist, B., Statistikteori med tillämpningar, Bok B, 3rd Edition. Studentlitteratur AB. Breidenbach, J., Næsset, E., Lien, V., Gobakken, T., Solberg, S., 21. Prediction of species specific forest inventory attributes using a nonparametric semi-individual tree crown approach based on fused airborne laser scanning and multispectral data. Remote Sensing of Environment 114 (4), Holmgren, J., 24. Prediction of tree height, basal area and stem volume in forest stands using airborne laser scanning. Scandinavian Journal of Forest Research 19:6, Jonsson, T., Om bonitering av skogsmark. Skogsvårdsföreningens tidskrift tolfte årgången, Klang, D., Burman, H., 26. En ny svensk höjdmodell. laserskanning, testprojekt falun. Tech. rep., Lantmäteriet, Digpro AB, lmv-rapport 26:3, Lantmäteriet. ISSN Lantmäteriet, juli 29. Infoblad 14: Flygburen laserskanning. Ny nationell höjdmodell - Nyhetsbrev, rapporter och informationsblad. URL geodesi_gps_och_detaljmatning/nytt_referenssytem/ Infoblad/info_blad-14.pdf Lantmäteriet, 211. Erfarenheter och praktiska råd vid användning av nnh (bilaga till produktbeskrivning: Laserdata). URL http: // geografisk_info/hojdinfo/211/pm_metadatabilaga.pdf Lantmäteriet, 212a. URL geodesi_gps_och_detaljmatning/nytt_referenssytem/ Infoblad/info_blad-14.pdf Lantmäteriet, 212b. Infoblad 13: Ny nationell höjdmodell. Ny nationell höjdmodell - Nyhetsbrev, rapporter och informationsblad. 29
30 URL geodesi_gps_och_detaljmatning/nytt_referenssytem/ Infoblad/info_blad-13.pdf Lantmäteriet, april 212c. Produktbeskrivning: Laserdata. URL http: // geografisk_info/hojdinfo/prod-beskrivn/laserdat.pdf Naesset, E., Determination of mean tree height of forest stands using airborne laser scanner data. ISPRS Journal of Photogrammetry & Remote Sensing 52, Naesset, E., 22. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sensing of Environment 8:1, Naesset, E., 212. Anvendelse av laserscanning i skogbruksplanleggingen - hvor står vi og hvor går vi: noen tanker om situasjonen i norden. Seminarium. URL presentationer/212/skogsgis212_naesset1.pdf Nilsson, M., Estimation of tree heights and stand volume using an airborne lidar system. Remote Sensing of Environment 56:1, 17. Petrie, G., 211. Airborne topographic laser scanners. Geoinformatics 1, Regeringen, 27. Sverige inför klimatförändringarna - hot och möjligheter. URL s http: // Rönnberg, A., Pm - jämförelse av överlappande höjdmodeller. URL och_geografisk_info/hojdinfo/veckorapport_nnh.pdf Rost, H., mars-juli 212. Personligt möte och mailkonversation. Vain, A., 21. Calibration of airborne laser scanning intensity data. ISSN: X 86 (39), Department of Geomatics, Estonian University of Life Sciences. 3
31 Vain, A., Yu, X., Kaasalainen, S., Hyyppä, J., 21. Correcting airborne laser scanning intensity data for automatic gain control effect. IEEE Geoscience and remote sensing letters 7:3,
32 A Ordlista NNH Ny Nationell Höjdmodell Raster Bild uppbyggd av en matris, där varje pixel motsvaras av ett element i matrisen Produktionsområde (A-I) Indelningen av Sverige för datainsamlingen för NNH Skanningsområde Indelningen av varje produktionområde i NNH Testområde Rektangel för analys. Skannat fyra gånger, 2 gånger med system från Leica samt 2 gånger med system från Optech. Testruta Testområdena delas in i kvadrater om 2 m 2 m, varje sådan ruta kallas testruta. Leica N-S Skannat med system från Leica med ygriktning norr till söder eller omvänt söder till norr. Leica V-Ö Skannat med system från Leica med ygriktning väster till öster eller omvänt öster till väster. Optech N-S Skannat med system från Optech med ygriktning norr till söder eller omvänt söder till norr. Optech V-Ö Skannat med system från Optech med ygriktning väster till öster eller omvänt öster till väster. 32
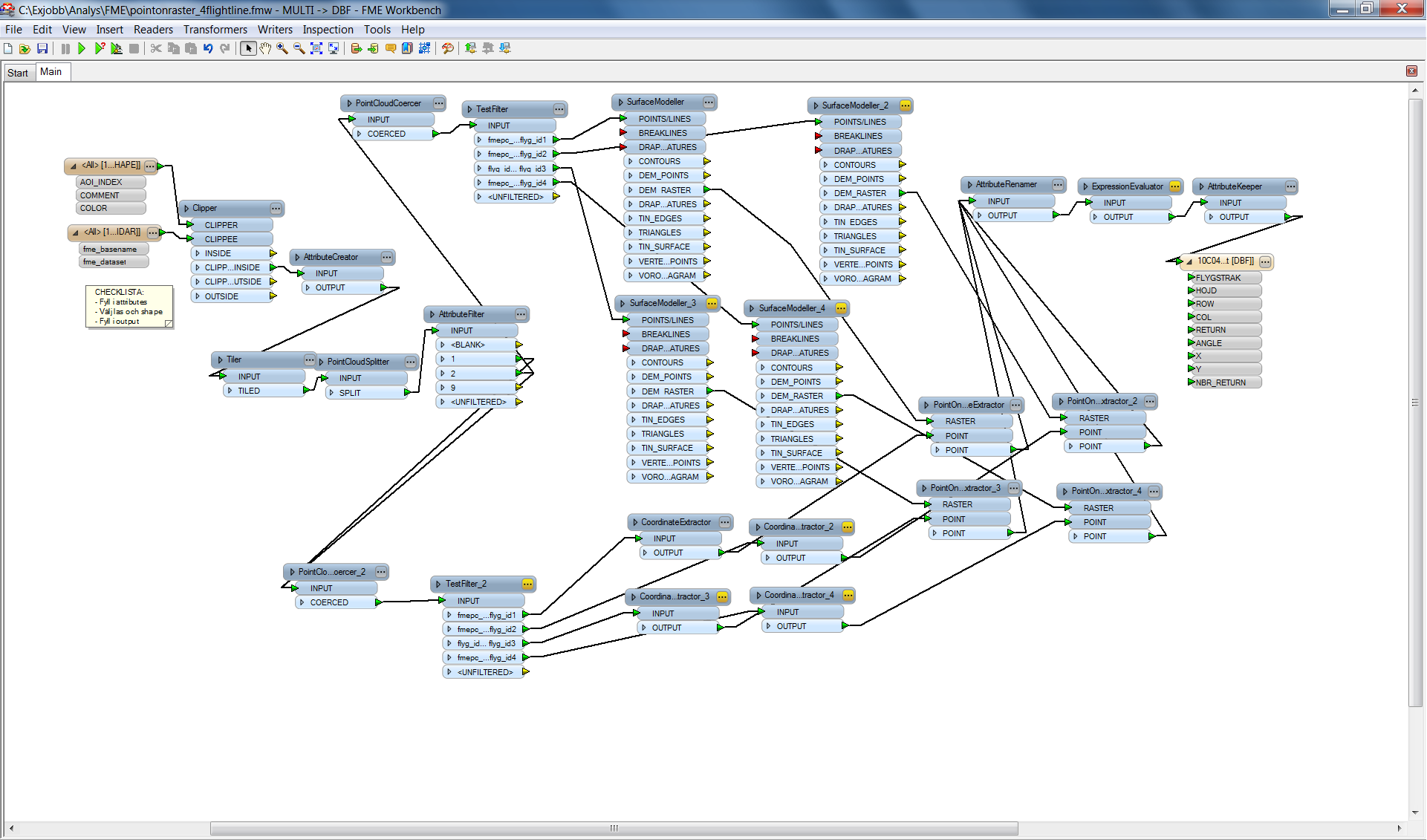
33 B FME Programvaran FME har använts för att ordna data inför analysen, som mestadels gjorts i MatLab. I guren nedan visas ett workspace som till att börja med läser in en shape-l och en las-l för att slutligen skriva till en dbf-l som senare läses in i MatLab. Shape-len skapades tidigare genom att manuellt rita ut kvadrater i programvaran FugroViewer. FME klipper ut punktmolnet i las-len som specicerats av shape-len för att sedan separera punkterna efter klasstillhörighet som tillhandahållits av Lantmäteriet. De punkter som klassicerats som markpunkter skapar FME en markmodell i form av ett raster. Varje punkts höjd beräknas sedan med markmodellen som referenspunkt. Därefter skrivs information om varje punkt vidare till en dbf-l med tillhörande användbara attribut. 33
34 34
1 (9) Version 1.0 ERFARENHETER OCH PRAKTISKA RÅD VID ANVÄNDNING AV NNH (BILAGA TILL PRODUKTBESKRIVNING)
 Version 1.0 ERFARENHETER OCH PRAKTISKA RÅD VID ANVÄNDNING AV NNH (BILAGA TILL PRODUKTBESKRIVNING)") L A N T M Ä T E R I E T 1 (9) ERFARENHETER OCH PRAKTISKA RÅD VID ANVÄNDNING AV NNH (BILAGA TILL PRODUKTBESKRIVNING) 2011-11-04 Version 1.0 Bakgrund Lantmäteriets laserskanning av landet resulterar i en
L A N T M Ä T E R I E T 1 (9) ERFARENHETER OCH PRAKTISKA RÅD VID ANVÄNDNING AV NNH (BILAGA TILL PRODUKTBESKRIVNING) 2011-11-04 Version 1.0 Bakgrund Lantmäteriets laserskanning av landet resulterar i en
1(7) Dokumentversion: 1.1. Produktbeskrivning: Laserdata Skog
 Dokumentversion: 1.1. Produktbeskrivning: Laserdata Skog") 1(7) Datum: 2019-05-28 Dokumentversion: 1.1 Produktbeskrivning: Laserdata Skog LANTMÄTERIET 2019-05-28 2 (7) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
1(7) Datum: 2019-05-28 Dokumentversion: 1.1 Produktbeskrivning: Laserdata Skog LANTMÄTERIET 2019-05-28 2 (7) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
Jämförelse av överlappande höjdmodeller
 L A N T M Ä T E R I E T 1 (10) PM Jämförelse av överlappande höjdmodeller 2011-07-01 Dnr Jämförelse av överlappande höjdmodeller Bakgrund Vid uppbyggnaden av Ny nationell höjdmodell kommer laserskanningen
L A N T M Ä T E R I E T 1 (10) PM Jämförelse av överlappande höjdmodeller 2011-07-01 Dnr Jämförelse av överlappande höjdmodeller Bakgrund Vid uppbyggnaden av Ny nationell höjdmodell kommer laserskanningen
1(8) Dokumentversion: 1.0. Produktbeskrivning: Laserdata Skog
 Dokumentversion: 1.0. Produktbeskrivning: Laserdata Skog") 1(8) Datum: 2018-09-21 Dokumentversion: 1.0 Produktbeskrivning: Laserdata Skog LANTMÄTERIET 2018-09-11 2 (8) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
1(8) Datum: 2018-09-21 Dokumentversion: 1.0 Produktbeskrivning: Laserdata Skog LANTMÄTERIET 2018-09-11 2 (8) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
Ny Nationell Höjdmodell (NNH)
") Ny Nationell Höjdmodell (NNH) Gunnar Lysell, Vattenstämman 2012-05-15 gunnar.lysell@lm.se Klimat- och sårbarhetsutredningen Utredningen, SOU 2007:60, föreslog att: Lantmäteriet bör få resurser för att
Ny Nationell Höjdmodell (NNH) Gunnar Lysell, Vattenstämman 2012-05-15 gunnar.lysell@lm.se Klimat- och sårbarhetsutredningen Utredningen, SOU 2007:60, föreslog att: Lantmäteriet bör få resurser för att
Ny Nationell Höjdmodell (NNH)
") Ny Nationell Höjdmodell (NNH) Laserskanning (LiDAR) Aerial photo 3D-model of same area Graphics: DN/Stefan Rothmaier Den Nya Nationella Höjdmodellen (NNH) Framställs med hjälp av laserskanning Ger ett
Ny Nationell Höjdmodell (NNH) Laserskanning (LiDAR) Aerial photo 3D-model of same area Graphics: DN/Stefan Rothmaier Den Nya Nationella Höjdmodellen (NNH) Framställs med hjälp av laserskanning Ger ett
Laserskanning. Lars Harrie, Lunds universitet. Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet
 Laserskanning Lars Harrie, Lunds universitet Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet Innehåll 1. Introduktion 2. Grundläggande teknik för flygburen laserskanning 3. Data från flygburen
Laserskanning Lars Harrie, Lunds universitet Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet Innehåll 1. Introduktion 2. Grundläggande teknik för flygburen laserskanning 3. Data från flygburen
Laserskanning för bättre beslut i skogsbruket - nu eller i framtiden?
 Laserskanning för bättre beslut i skogsbruket - nu eller i framtiden? Johan Holmgren SkogsGIS 9-10 april 2014 Foto: Lee Shand Laserskanner: TopEye, BLOM Vilken information kan vi få? http://commons.wikimedia.org/wiki/file:airborne_laser_scanning_discrete_echo_and_full_waveform_signal_comparison.svg
Laserskanning för bättre beslut i skogsbruket - nu eller i framtiden? Johan Holmgren SkogsGIS 9-10 april 2014 Foto: Lee Shand Laserskanner: TopEye, BLOM Vilken information kan vi få? http://commons.wikimedia.org/wiki/file:airborne_laser_scanning_discrete_echo_and_full_waveform_signal_comparison.svg
Produktbeskrivning: Höjdmodell Visning
 1(11) D atum: D ok umentversion: A vser tjänstens gränssnittsversion: 2014-12-12 1.0 1.0 Produktbeskrivning: Höjdmodell Visning Förändringsförteckning Innehållsförteckning 1 Allmän beskrivning... 2 1.1
1(11) D atum: D ok umentversion: A vser tjänstens gränssnittsversion: 2014-12-12 1.0 1.0 Produktbeskrivning: Höjdmodell Visning Förändringsförteckning Innehållsförteckning 1 Allmän beskrivning... 2 1.1
Laserskanning. Lars Harrie, Lunds universitet. Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet
 Laserskanning Lars Harrie, Lunds universitet Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet 1. Introduktion Innehåll 2. Grundläggande teknik för flygburen laserskanning 3. Data från flygburen
Laserskanning Lars Harrie, Lunds universitet Flera bilder har tagits fram av Gunnar Lysell, Lantmäteriet 1. Introduktion Innehåll 2. Grundläggande teknik för flygburen laserskanning 3. Data från flygburen
Skogliga skattningar med 3D data från flygbilder - Framtiden efter NNH
 Skogliga skattningar med 3D data från flygbilder - Framtiden efter NNH Doktorandprojekt finansierat av Kempestiftelserna och Skogssällskapet Innehåll Introduktion digital fotogrammetri Överblick av doktorandprojektet
Skogliga skattningar med 3D data från flygbilder - Framtiden efter NNH Doktorandprojekt finansierat av Kempestiftelserna och Skogssällskapet Innehåll Introduktion digital fotogrammetri Överblick av doktorandprojektet
Från laserdata till kvalitetsäkrad höjdmodell. Christofer Grandin. christofer.grandin@blomasa.com
 Från laserdata till kvalitetsäkrad höjdmodell Christofer Grandin christofer.grandin@blomasa.com Blom i Europa Blom-kontor (22st, ca 1 000 anställda ) Länder med Blom Pictometry snedbilder Från laserdata
Från laserdata till kvalitetsäkrad höjdmodell Christofer Grandin christofer.grandin@blomasa.com Blom i Europa Blom-kontor (22st, ca 1 000 anställda ) Länder med Blom Pictometry snedbilder Från laserdata
1(10) Dokumentversion: 2.5. Produktbeskrivning: Laserdata NH
 Dokumentversion: 2.5. Produktbeskrivning: Laserdata NH") 1(10) Datum: 2018-11-22 Dokumentversion: 2.5 Produktbeskrivning: Laserdata NH LANTMÄTERIET 2018-11-22 2 (10) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
1(10) Datum: 2018-11-22 Dokumentversion: 2.5 Produktbeskrivning: Laserdata NH LANTMÄTERIET 2018-11-22 2 (10) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
Ny nationell höjdmodell (NNH) Gävle kommun - användarerfarenheter
 Gävle kommun - användarerfarenheter") 2011-09-20 Ny nationell höjdmodell (NNH) Gävle kommun - användarerfarenheter Ungefär 1/3 av Gävles yta har skannats och materialet levererades i januari 2011. Innehåll: o Projekt - Nya nivåkurvor till
2011-09-20 Ny nationell höjdmodell (NNH) Gävle kommun - användarerfarenheter Ungefär 1/3 av Gävles yta har skannats och materialet levererades i januari 2011. Innehåll: o Projekt - Nya nivåkurvor till
1(10) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: Produktbeskrivning: Höjdmodell Visning
 Datum: Dokumentversion: Avser tjänstens gränssnittsversion: Produktbeskrivning: Höjdmodell Visning") 1(10) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: 2016-12-01 1.1 1.0.1 Produktbeskrivning: Höjdmodell Visning LANTMÄTERIET 2016-12-01 2 (10) Innehållsförteckning 1 Allmän beskrivning...
1(10) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: 2016-12-01 1.1 1.0.1 Produktbeskrivning: Höjdmodell Visning LANTMÄTERIET 2016-12-01 2 (10) Innehållsförteckning 1 Allmän beskrivning...
Ny nationell höjdmodell
 Ny nationell höjdmodell Ny Nationell Höjdmodell (NNH) Var står vi nu (september 2011)? Aktuellt produktionsläge Höstens skanning Skanning under 2012 och framåt Vägen från skanning till färdiga data Noggrannhet
Ny nationell höjdmodell Ny Nationell Höjdmodell (NNH) Var står vi nu (september 2011)? Aktuellt produktionsläge Höstens skanning Skanning under 2012 och framåt Vägen från skanning till färdiga data Noggrannhet
Ny Nationell Höjdmodell
 Ny Nationell Höjdmodell Janos Böhm Anpassning till ett förändrat klimat 2010-04-21/22 Malmö Ny nationell höjdmodell Klimat- och sårbarhetsutredningen föreslår i sitt betänkande (SOU 2007:60) att Lantmäteriet
Ny Nationell Höjdmodell Janos Böhm Anpassning till ett förändrat klimat 2010-04-21/22 Malmö Ny nationell höjdmodell Klimat- och sårbarhetsutredningen föreslår i sitt betänkande (SOU 2007:60) att Lantmäteriet
Laserskanning och orienteringskartritning
 Laserskanning och orienteringskartritning SOFT:s kartritningskurs 29 juni 1 juli 2011 i Sälen Gunnar Lysell, SOFT & Lantmäteriet gunnar.lysell@lm.se GeoXD AB Det aktuella läget»traditionella analoga flygbilder
Laserskanning och orienteringskartritning SOFT:s kartritningskurs 29 juni 1 juli 2011 i Sälen Gunnar Lysell, SOFT & Lantmäteriet gunnar.lysell@lm.se GeoXD AB Det aktuella läget»traditionella analoga flygbilder
Metodik för skattning av skogliga variabler
 Metodik för skattning av skogliga variabler Jonas Jonzén Forskningsingenjör SLU Swedish University of Agricultural Sciences Forest Remote Sensing Skattade variabler Pixelstorlek 12.5 x 12.5 m Variabel
Metodik för skattning av skogliga variabler Jonas Jonzén Forskningsingenjör SLU Swedish University of Agricultural Sciences Forest Remote Sensing Skattade variabler Pixelstorlek 12.5 x 12.5 m Variabel
Kvalitetskontroll laserscanning Göta- och Nordre älvs dalgångar
 Kvalitetskontroll laserscanning Göta- och Nordre älvs dalgångar Scanning utförd maj 2006 Mats Nyborg 2006-11-16 VATTENFALL POWER CONSULTANT Dokumenttyp Dokumentidentitet Rev. nr. Rapportdatum Uppdragsnummer
Kvalitetskontroll laserscanning Göta- och Nordre älvs dalgångar Scanning utförd maj 2006 Mats Nyborg 2006-11-16 VATTENFALL POWER CONSULTANT Dokumenttyp Dokumentidentitet Rev. nr. Rapportdatum Uppdragsnummer
Höga vattenflöden/las-data/kris-gis. Mora Ulf Henriksson, Falu kn Lars Robertsson, Borlänge kn
 Höga vattenflöden/las-data/kris-gis Mora 2016-03-10 Ulf Henriksson, Falu kn Lars Robertsson, Borlänge kn Fakta om laserskanning NNH, Ny Nationell Höjdmodell Laserskanning utförs från flygplan och ger laserdata
Höga vattenflöden/las-data/kris-gis Mora 2016-03-10 Ulf Henriksson, Falu kn Lars Robertsson, Borlänge kn Fakta om laserskanning NNH, Ny Nationell Höjdmodell Laserskanning utförs från flygplan och ger laserdata
Lantmäteriets Nationella Höjdmodell
 Lantmäteriets Nationella Höjdmodell Uppbyggnad Produkter Användning Nya tjänster Kristina.kallur.jaderkvist@lm.se Klimat- och sårbarhetsutredningen Utredningen, SOU 2007:60, föreslog att: Lantmäteriet
Lantmäteriets Nationella Höjdmodell Uppbyggnad Produkter Användning Nya tjänster Kristina.kallur.jaderkvist@lm.se Klimat- och sårbarhetsutredningen Utredningen, SOU 2007:60, föreslog att: Lantmäteriet
Hur kan skogsbruket utnyttja laserscanningen som Lantmäteriet genomför över hela Sverige?
 Hur kan skogsbruket utnyttja laserscanningen som Lantmäteriet genomför över hela Sverige? Patrik Olsson och Lars Björk Enheten för Geografisk Information Patrik.olsson@skogsstyrelsen.se Lars.bjork@skogsstyrelsen.se
Hur kan skogsbruket utnyttja laserscanningen som Lantmäteriet genomför över hela Sverige? Patrik Olsson och Lars Björk Enheten för Geografisk Information Patrik.olsson@skogsstyrelsen.se Lars.bjork@skogsstyrelsen.se
Metodik för skattning av skogliga variabler
 Metodik för skattning av skogliga variabler Nils Lindgren Forskningsingenjör SLU Swedish University of Agricultural Sciences Forest Remote Sensing Skattade variabler Pixelstorlek 12.5 x 12.5 m Variabel
Metodik för skattning av skogliga variabler Nils Lindgren Forskningsingenjör SLU Swedish University of Agricultural Sciences Forest Remote Sensing Skattade variabler Pixelstorlek 12.5 x 12.5 m Variabel
NNH-data för 3Dvisualisering
 NNH-data för 3Dvisualisering av byggnader med FME FME World Tour 2016 lars.robertsson@borlange.se Hörsalen 10:00-10:30 Fakta om laserskanning NNH, Ny Nationell Höjdmodell Laserskanning utförs från flygplan
NNH-data för 3Dvisualisering av byggnader med FME FME World Tour 2016 lars.robertsson@borlange.se Hörsalen 10:00-10:30 Fakta om laserskanning NNH, Ny Nationell Höjdmodell Laserskanning utförs från flygplan
Sänkningen av parasitnivåerna i blodet
 4.1 Oberoende (x-axeln) Kön Kön Längd Ålder Dos Dos C max Parasitnivå i blodet Beroende (y-axeln) Längd Vikt Vikt Vikt C max Sänkningen av parasitnivåerna i blodet Sänkningen av parasitnivåerna i blodet
4.1 Oberoende (x-axeln) Kön Kön Längd Ålder Dos Dos C max Parasitnivå i blodet Beroende (y-axeln) Längd Vikt Vikt Vikt C max Sänkningen av parasitnivåerna i blodet Sänkningen av parasitnivåerna i blodet
Laserskanning Nya möjligheter för skogsbruket. Swedish University of Agricultural Sciences Forest Remote Sensing
 Laserskanning Nya möjligheter för skogsbruket Regeringsuppdrag under 3 år Totalt ca 20 MSEK till Skogsstyrelsens förvaltningsanslag för utveckling av förbättrade skogliga skattningar från laserdata Medlen
Laserskanning Nya möjligheter för skogsbruket Regeringsuppdrag under 3 år Totalt ca 20 MSEK till Skogsstyrelsens förvaltningsanslag för utveckling av förbättrade skogliga skattningar från laserdata Medlen
3D-stadsmodeller utgående från NNHlaserdata
 3D-stadsmodeller utgående från NNHlaserdata Simon Ahlberg, FORAN Remote Sensing AB Khashayar Farmanbar, Agency9 AB Sammanfattning FORAN Remote Sensing AB arbetar sedan länge med att ur laserdata ta fram
3D-stadsmodeller utgående från NNHlaserdata Simon Ahlberg, FORAN Remote Sensing AB Khashayar Farmanbar, Agency9 AB Sammanfattning FORAN Remote Sensing AB arbetar sedan länge med att ur laserdata ta fram
Skogliga grunddata produktbeskrivning. Innehållsförteckning 1(5)
") 1 1(5) Datum 2018-01-22 Skogliga grunddata produktbeskrivning Dokumentversion 1.0 Innehållsförteckning Skogliga grunddata produktbeskrivning... 1 Allmän beskrivning... 2 Innehåll... 2 Geografisk täckning...
1 1(5) Datum 2018-01-22 Skogliga grunddata produktbeskrivning Dokumentversion 1.0 Innehållsförteckning Skogliga grunddata produktbeskrivning... 1 Allmän beskrivning... 2 Innehåll... 2 Geografisk täckning...
Högskoleprovet Kvantitativ del
 Högskoleprovet Kvantitativ del Här följer anvisningar till de kvantitativa delproven XYZ, KVA, NOG och DTK. Provhäftet innehåller 40 uppgifter och den totala provtiden är 55 minuter. Ägna inte för lång
Högskoleprovet Kvantitativ del Här följer anvisningar till de kvantitativa delproven XYZ, KVA, NOG och DTK. Provhäftet innehåller 40 uppgifter och den totala provtiden är 55 minuter. Ägna inte för lång
Björnstammens storlek i Sverige 2008 länsvisa uppskattningar och trender Rapport 2009 2 från det Skandinaviska björnprojektet
 Björnstammens storlek i Sverige 2008 länsvisa uppskattningar och trender Rapport 2009 2 från det Skandinaviska björnprojektet Jonas Kindberg, Jon E. Swenson och Göran Ericsson Introduktion Björnen tillhör
Björnstammens storlek i Sverige 2008 länsvisa uppskattningar och trender Rapport 2009 2 från det Skandinaviska björnprojektet Jonas Kindberg, Jon E. Swenson och Göran Ericsson Introduktion Björnen tillhör
1(12) Dokumentversion: 2.4. Produktbeskrivning: Laserdata NH
 Dokumentversion: 2.4. Produktbeskrivning: Laserdata NH") 1(12) Datum: 2018-03-05 Dokumentversion: 2.4 Produktbeskrivning: Laserdata NH LANTMÄTERIET 2018-03-05 2 (12) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
1(12) Datum: 2018-03-05 Dokumentversion: 2.4 Produktbeskrivning: Laserdata NH LANTMÄTERIET 2018-03-05 2 (12) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
GSD-Höjddata, grid 50+ nh
 1(5) Datum: Dokumentversion: 2016-12-01 1.1 Produktbeskrivning: GSD-Höjddata, grid 50+ nh LANTMÄTERIET 2016-12-01 2 (5) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
1(5) Datum: Dokumentversion: 2016-12-01 1.1 Produktbeskrivning: GSD-Höjddata, grid 50+ nh LANTMÄTERIET 2016-12-01 2 (5) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
SF1905 Sannolikhetsteori och statistik: Lab 2 ht 2011
 Avd. Matematisk statistik Tobias Rydén 2011-09-30 SF1905 Sannolikhetsteori och statistik: Lab 2 ht 2011 Förberedelser. Innan du går till laborationen, läs igenom den här handledningen. Repetera också i
Avd. Matematisk statistik Tobias Rydén 2011-09-30 SF1905 Sannolikhetsteori och statistik: Lab 2 ht 2011 Förberedelser. Innan du går till laborationen, läs igenom den här handledningen. Repetera också i
Förädlade produkter från NNH-data. Christofer Grandin
 Förädlade produkter från NNH-data Christofer Grandin Förädlade produkter från NNH Laserpunkter Mark - Grid, TIN - Lutningsindex, skuggning, relief, höjdkurvor - Brytlinjer Byggnader / Infrastruktur - Byggnader
Förädlade produkter från NNH-data Christofer Grandin Förädlade produkter från NNH Laserpunkter Mark - Grid, TIN - Lutningsindex, skuggning, relief, höjdkurvor - Brytlinjer Byggnader / Infrastruktur - Byggnader
Geodata och tjänster från Lantmäteriet som ingår i FUK 25 nov 2014 Lunds universitet
 Geodata och tjänster från Lantmäteriet som ingår i FUK 25 nov 2014 Lunds universitet Julie Mostert Innehåll Lantmäteriets Geodata som ingår i FUK Geodata för nedladdning Geodatatjänster Övrigt av intresse
Geodata och tjänster från Lantmäteriet som ingår i FUK 25 nov 2014 Lunds universitet Julie Mostert Innehåll Lantmäteriets Geodata som ingår i FUK Geodata för nedladdning Geodatatjänster Övrigt av intresse
LMA201/LMA521: Faktorförsök
 Föreläsning 1 Innehåll Försöksplanering Faktorförsök med två nivåer Skattning av eekterna. Diagram för huvudeekter Diagram för samspelseekter Paretodiagram Den här veckan kommer tillägnas faktorförsök.
Föreläsning 1 Innehåll Försöksplanering Faktorförsök med två nivåer Skattning av eekterna. Diagram för huvudeekter Diagram för samspelseekter Paretodiagram Den här veckan kommer tillägnas faktorförsök.
Laboration 2: Styrkefunktion samt Regression
 Lunds Tekniska Högskola Matematikcentrum Matematisk statistik Laboration 2 Styrkefunktion & Regression FMSF70&MASB02, HT19 Laboration 2: Styrkefunktion samt Regression Syfte Styrkefunktion Syftet med dagens
Lunds Tekniska Högskola Matematikcentrum Matematisk statistik Laboration 2 Styrkefunktion & Regression FMSF70&MASB02, HT19 Laboration 2: Styrkefunktion samt Regression Syfte Styrkefunktion Syftet med dagens
1. Lära sig plotta en beroende variabel mot en oberoende variabel. 2. Lära sig skatta en enkel linjär regressionsmodell
 Datorövning 1 Regressions- och tidsserieanalys Syfte 1. Lära sig plotta en beroende variabel mot en oberoende variabel 2. Lära sig skatta en enkel linjär regressionsmodell 3. Lära sig beräkna en skattning
Datorövning 1 Regressions- och tidsserieanalys Syfte 1. Lära sig plotta en beroende variabel mot en oberoende variabel 2. Lära sig skatta en enkel linjär regressionsmodell 3. Lära sig beräkna en skattning
Texturerade 3D-modeller
 Texturerade 3D-modeller från flygbilder och gatubilder Helén Rost Caroline Ivarsson (examensarbete 2014) Bakgrund 3D-modeller används idag allt oftare för att Visualisera Planera Utvärdera Kommunicera
Texturerade 3D-modeller från flygbilder och gatubilder Helén Rost Caroline Ivarsson (examensarbete 2014) Bakgrund 3D-modeller används idag allt oftare för att Visualisera Planera Utvärdera Kommunicera
Hur man arbetar med OL Laser
 Hur man arbetar med OL Laser - Kortfattad handledning för nybörjare - 1. Att arbeta med OL Laser Det här dokumentet är en kortfattad beskrivning av hur man arbetar med programmet OL Laser för att skapa
Hur man arbetar med OL Laser - Kortfattad handledning för nybörjare - 1. Att arbeta med OL Laser Det här dokumentet är en kortfattad beskrivning av hur man arbetar med programmet OL Laser för att skapa
Föreläsning 12: Regression
 Föreläsning 12: Regression Matematisk statistik David Bolin Chalmers University of Technology Maj 15, 2014 Binomialfördelningen Låt X Bin(n, p). Vi observerar x och vill ha information om p. p = x/n är
Föreläsning 12: Regression Matematisk statistik David Bolin Chalmers University of Technology Maj 15, 2014 Binomialfördelningen Låt X Bin(n, p). Vi observerar x och vill ha information om p. p = x/n är
Möjlig uppdatering av NVDB:s geometrier
 RAPPORT 9A Möjlig uppdatering av NVDB:s geometrier Jämförelse mellan NVDB och mobil laserskanning från ANDA Del av FoU-projektet Infrastruktur i 3D i samarbete mellan Innovation Norge, Trafikverket och
RAPPORT 9A Möjlig uppdatering av NVDB:s geometrier Jämförelse mellan NVDB och mobil laserskanning från ANDA Del av FoU-projektet Infrastruktur i 3D i samarbete mellan Innovation Norge, Trafikverket och
SKOGLIGA TILLÄMPNINGAR
 STUDIEAVSNITT 3 SKOGLIGA TILLÄMPNINGAR I detta avsnitt ska vi titta på några av de skogliga tillämpningar på geometri som finns. SKOGSKARTAN EN MODELL AV VERKLIGHETEN Arbetar man i skogen klarar man sig
STUDIEAVSNITT 3 SKOGLIGA TILLÄMPNINGAR I detta avsnitt ska vi titta på några av de skogliga tillämpningar på geometri som finns. SKOGSKARTAN EN MODELL AV VERKLIGHETEN Arbetar man i skogen klarar man sig
λ = T 2 g/(2π) 250/6 40 m
 250/6 40 m") Problem. Utbredning av vattenvågor är komplicerad. Vågorna är inte transversella, utan vattnet rör sig i cirklar eller ellipser. Våghastigheten beror bland annat på hur djupt vattnet är. I grunt vatten
Problem. Utbredning av vattenvågor är komplicerad. Vågorna är inte transversella, utan vattnet rör sig i cirklar eller ellipser. Våghastigheten beror bland annat på hur djupt vattnet är. I grunt vatten
FÅ FRAM INDATA. När inga data finns!? Beslutsfattarens dilemma är att det är svårt att spå! Särskilt om framtiden!
 FÅ FRAM INDATA När inga data finns!? Beslutsfattarens dilemma är att det är svårt att spå! Särskilt om framtiden! (Falstaff Fakir) Svårigheter att få fram bra information - en liten konversation Ge mig
FÅ FRAM INDATA När inga data finns!? Beslutsfattarens dilemma är att det är svårt att spå! Särskilt om framtiden! (Falstaff Fakir) Svårigheter att få fram bra information - en liten konversation Ge mig
Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning
 Fakulteten för humaniora och samhällsvetenskap Naturgeografi Magnus Wallsten Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning Comparison
Fakulteten för humaniora och samhällsvetenskap Naturgeografi Magnus Wallsten Jämförelse mellan volymberäkning baserad på flygfotografering och volymberäkning baserad på traditionell inmätning Comparison
Högskoleprovet Kvantitativ del
 Högskoleprovet Kvantitativ del Här följer anvisningar till de kvantitativa delproven XYZ, KVA, NOG och DTK. Provhäftet innehåller 40 uppgifter och den totala provtiden är 55 minuter. XYZ Matematisk problemlösning
Högskoleprovet Kvantitativ del Här följer anvisningar till de kvantitativa delproven XYZ, KVA, NOG och DTK. Provhäftet innehåller 40 uppgifter och den totala provtiden är 55 minuter. XYZ Matematisk problemlösning
Matematisk statistik kompletterande projekt, FMSF25 Övning om regression
 Lunds tekniska högskola, Matematikcentrum, Matematisk statistik Matematisk statistik kompletterande projekt, FMSF Övning om regression Denna övningslapp behandlar regression och är tänkt som förberedelse
Lunds tekniska högskola, Matematikcentrum, Matematisk statistik Matematisk statistik kompletterande projekt, FMSF Övning om regression Denna övningslapp behandlar regression och är tänkt som förberedelse
Produktbeskrivning: Historiska ortofoton
 L A N T M Ä T E R I E T 1(12) Datum: Dokumentversion: 2012-12-04 1.1 Produktbeskrivning: Historiska ortofoton Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
L A N T M Ä T E R I E T 1(12) Datum: Dokumentversion: 2012-12-04 1.1 Produktbeskrivning: Historiska ortofoton Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
2. Lära sig skatta en multipel linjär regressionsmodell samt plotta variablerna. 4. Lära sig skatta en linjär regressionsmodell med interaktionstermer
 Datorövning 2 Regressions- och tidsserieanalys Syfte 1. Lära sig skapa en korrelationsmatris 2. Lära sig skatta en multipel linjär regressionsmodell samt plotta variablerna mot varandra 3. Lära sig beräkna
Datorövning 2 Regressions- och tidsserieanalys Syfte 1. Lära sig skapa en korrelationsmatris 2. Lära sig skatta en multipel linjär regressionsmodell samt plotta variablerna mot varandra 3. Lära sig beräkna
Beställning av laserdata från Lantmäteriets skanning
 Beställning av laserdata från Lantmäteriets skanning I takt med att landet täcks av laserdata ur Lantmäteriets rikstäckande skanning så kommer dessa data att utgöra en viktig informationskälla för många
Beställning av laserdata från Lantmäteriets skanning I takt med att landet täcks av laserdata ur Lantmäteriets rikstäckande skanning så kommer dessa data att utgöra en viktig informationskälla för många
2. 1 L ä n g d, o m k r e t s o c h a r e a
 2. 1 L ä n g d, o m k r e t s o c h a r e a Ett plan är en yta som inte är buktig och som är obegränsad åt alla håll. På ett plan kan man rita en linje som är rak (rät). En linje är obegränsad åt båda
2. 1 L ä n g d, o m k r e t s o c h a r e a Ett plan är en yta som inte är buktig och som är obegränsad åt alla håll. På ett plan kan man rita en linje som är rak (rät). En linje är obegränsad åt båda
F8 Skattningar. Måns Thulin. Uppsala universitet Statistik för ingenjörer 14/ /17
 1/17 F8 Skattningar Måns Thulin Uppsala universitet thulin@math.uu.se Statistik för ingenjörer 14/2 2013 Inledande exempel: kullager Antag att diametern på kullager av en viss typ är normalfördelad N(µ,
1/17 F8 Skattningar Måns Thulin Uppsala universitet thulin@math.uu.se Statistik för ingenjörer 14/2 2013 Inledande exempel: kullager Antag att diametern på kullager av en viss typ är normalfördelad N(µ,
Skogliga grunddata. Produktkatalog för öppna geodata inom geodatasamverkan
 Skogliga grunddata Produktkatalog för öppna geodata inom geodatasamverkan Kartprodukter - skog VOL = Volym i m3sk/ha HGV = Grundytevägd medelhöjd i dm GY = Grundyta i m2/ha DGV = Grundytevägd medeldiameter
Skogliga grunddata Produktkatalog för öppna geodata inom geodatasamverkan Kartprodukter - skog VOL = Volym i m3sk/ha HGV = Grundytevägd medelhöjd i dm GY = Grundyta i m2/ha DGV = Grundytevägd medeldiameter
Mätning av fokallängd hos okänd lins
 Mätning av fokallängd hos okänd lins Syfte Labbens syfte är i första hand att lära sig hantera mätfel och uppnå god noggrannhet, även med systematiska fel. I andra hand är syftet att hantera linser och
Mätning av fokallängd hos okänd lins Syfte Labbens syfte är i första hand att lära sig hantera mätfel och uppnå god noggrannhet, även med systematiska fel. I andra hand är syftet att hantera linser och
Metodik för skattning av skogliga variabler
 Metodik för skattning av skogliga variabler Jonas Jonzén Forskningsingenjör SLU Swedish University of Agricultural Sciences Skattade variabler Pixelstorlek 12.5 x 12.5 m Variabel Beskrivning Enhet HGV
Metodik för skattning av skogliga variabler Jonas Jonzén Forskningsingenjör SLU Swedish University of Agricultural Sciences Skattade variabler Pixelstorlek 12.5 x 12.5 m Variabel Beskrivning Enhet HGV
GSD-Höjddata, grid 2+
 1(9) Datum: Dokumentversion: 2018-11-22 2.4 Produktbeskrivning: GSD-Höjddata, grid 2+ LANTMÄTERIET 2018-11-22 2 (9) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
1(9) Datum: Dokumentversion: 2018-11-22 2.4 Produktbeskrivning: GSD-Höjddata, grid 2+ LANTMÄTERIET 2018-11-22 2 (9) Innehållsförteckning 1 Allmän beskrivning... 3 1.1 Innehåll... 3 1.2 Geografisk täckning...
Introduktion. Konfidensintervall. Parade observationer Sammanfattning Minitab. Oberoende stickprov. Konfidensintervall. Minitab
 Uppfödning av kyckling och fiskleveroljor Statistiska jämförelser: parvisa observationer och oberoende stickprov Matematik och statistik för biologer, 10 hp Fredrik Jonsson vt 2012 Fiskleverolja tillsätts
Uppfödning av kyckling och fiskleveroljor Statistiska jämförelser: parvisa observationer och oberoende stickprov Matematik och statistik för biologer, 10 hp Fredrik Jonsson vt 2012 Fiskleverolja tillsätts
Två innebörder av begreppet statistik. Grundläggande tankegångar i statistik. Vad är ett stickprov? Stickprov och urval
 Två innebörder av begreppet statistik Grundläggande tankegångar i statistik Matematik och statistik för biologer, 10 hp Informationshantering. Insamling, ordningsskapande, presentation och grundläggande
Två innebörder av begreppet statistik Grundläggande tankegångar i statistik Matematik och statistik för biologer, 10 hp Informationshantering. Insamling, ordningsskapande, presentation och grundläggande
Laserdata till Orienteringskartor
 2011-05-15 Laserdata till Orienteringskartor Jerker Boman, Gävle Orienterings Klubb Sammanfattning Gävle Orienterings Klubb beslutade tidigt att undersöka hur Laserdata från NNH projektet skulle kunna
2011-05-15 Laserdata till Orienteringskartor Jerker Boman, Gävle Orienterings Klubb Sammanfattning Gävle Orienterings Klubb beslutade tidigt att undersöka hur Laserdata från NNH projektet skulle kunna
2 Dataanalys och beskrivande statistik
 2 Dataanalys och beskrivande statistik Vad är data, och vad är statistik? Data är en samling fakta ur vilken man kan erhålla information. Statistik är vetenskapen (vissa skulle kalla det konst) om att
2 Dataanalys och beskrivande statistik Vad är data, och vad är statistik? Data är en samling fakta ur vilken man kan erhålla information. Statistik är vetenskapen (vissa skulle kalla det konst) om att
Manual för beräkningsverktyget Räkna med rotröta
 Manual för beräkningsverktyget Räkna med rotröta Verktyget Räkna med rotröta hjälper dig att beräkna rotrötan i ett granbestånd i två steg. I det första steget räknar du ut den förväntade genomsnittliga
Manual för beräkningsverktyget Räkna med rotröta Verktyget Räkna med rotröta hjälper dig att beräkna rotrötan i ett granbestånd i två steg. I det första steget räknar du ut den förväntade genomsnittliga
Uppsala i 4D användning av geodataunderlag från laserskanning
 Uppsala i 4D användning av geodataunderlag från laserskanning En presentation i samarbete mellan Johan Olofsson, Uppsala kommun & Simon Ahlberg, FORAN Remote Sensing AB Presentation av Uppsala i 4D Tekniken
Uppsala i 4D användning av geodataunderlag från laserskanning En presentation i samarbete mellan Johan Olofsson, Uppsala kommun & Simon Ahlberg, FORAN Remote Sensing AB Presentation av Uppsala i 4D Tekniken
Hur du laddar ner skogliga grunddata samt information om kartprodukterna
 Hur du laddar ner skogliga grunddata samt information om kartprodukterna Sidan 2: Kartprodukter Sidan 3: Tidplan Sidan 4: Fler laserkartor Sidan 5: Kanaler för distribution Sidan 6-11: Ladda ner data via
Hur du laddar ner skogliga grunddata samt information om kartprodukterna Sidan 2: Kartprodukter Sidan 3: Tidplan Sidan 4: Fler laserkartor Sidan 5: Kanaler för distribution Sidan 6-11: Ladda ner data via
Kvalitetsbeskrivning laserdata
 LANTMÄTERIET 2019-05-28 1 (21) Datum: 2019-05-28 Dokumentversion: 1.0 Kvalitetsbeskrivning laserdata LANTMÄTERIET 2019-05-28 2 (21) Innehållsförteckning 1. Inledning 3 2. Generellt om kvaliteten 3 3. Datafångst
LANTMÄTERIET 2019-05-28 1 (21) Datum: 2019-05-28 Dokumentversion: 1.0 Kvalitetsbeskrivning laserdata LANTMÄTERIET 2019-05-28 2 (21) Innehållsförteckning 1. Inledning 3 2. Generellt om kvaliteten 3 3. Datafångst
Statistiska Institutionen Gebrenegus Ghilagaber (docent)
") Statistiska Institutionen Gebrenegus Ghilagaber (docent) Lösningsförslag till skriftlig tentamen i FINANSIELL STATISTIK, grundnivå, 7,5 hp, VT09. Onsdagen 3 juni 2009-1 Sannolkhetslära Mobiltelefoner tillverkas
Statistiska Institutionen Gebrenegus Ghilagaber (docent) Lösningsförslag till skriftlig tentamen i FINANSIELL STATISTIK, grundnivå, 7,5 hp, VT09. Onsdagen 3 juni 2009-1 Sannolkhetslära Mobiltelefoner tillverkas
Högskoleprovet Kvantitativ del
 Högskoleprovet Kvantitativ del Här följer anvisningar till de kvantitativa delproven XYZ, KVA, NOG och DTK. Provhäftet innehåller 40 uppgifter och den totala provtiden är 55 minuter. XYZ Matematisk problemlösning
Högskoleprovet Kvantitativ del Här följer anvisningar till de kvantitativa delproven XYZ, KVA, NOG och DTK. Provhäftet innehåller 40 uppgifter och den totala provtiden är 55 minuter. XYZ Matematisk problemlösning
SCA Skog. Hur har SCA Skog utnyttjat det unika tillfället som Lantmäteriets rikstäckande laserskanningen erbjuder?
 SCA Skog Hur har SCA Skog utnyttjat det unika tillfället som Lantmäteriets rikstäckande laserskanningen erbjuder? Inledning Klimat- och sårbarhetsutredningen (SOU 2007:60) Kartlägga samhällets sårbarhet
SCA Skog Hur har SCA Skog utnyttjat det unika tillfället som Lantmäteriets rikstäckande laserskanningen erbjuder? Inledning Klimat- och sårbarhetsutredningen (SOU 2007:60) Kartlägga samhällets sårbarhet
BIOSTATISTISK GRUNDKURS, MASB11 ÖVNING 6 (2015-04-22) OCH INFÖR ÖVNING 7 (2015-04-29)
 OCH INFÖR ÖVNING 7 (2015-04-29)") LUNDS UNIVERSITET, MATEMATIKCENTRUM, MATEMATISK STATISTIK BIOSTATISTISK GRUNDKURS, MASB11 ÖVNING 6 (2015-04-22) OCH INFÖR ÖVNING 7 (2015-04-29) Aktuella avsnitt i boken: Kap 61 65 Lektionens mål: Du ska
LUNDS UNIVERSITET, MATEMATIKCENTRUM, MATEMATISK STATISTIK BIOSTATISTISK GRUNDKURS, MASB11 ÖVNING 6 (2015-04-22) OCH INFÖR ÖVNING 7 (2015-04-29) Aktuella avsnitt i boken: Kap 61 65 Lektionens mål: Du ska
Metod och teori. Statistik för naturvetare Umeå universitet
 Statistik för naturvetare -6-8 Metod och teori Uppgift Uppgiften är att undersöka hur hjärtfrekvensen hos en person påverkas av dennes kroppstemperatur. Detta görs genom enkel linjär regression. Låt signifikansnivån
Statistik för naturvetare -6-8 Metod och teori Uppgift Uppgiften är att undersöka hur hjärtfrekvensen hos en person påverkas av dennes kroppstemperatur. Detta görs genom enkel linjär regression. Låt signifikansnivån
Skogliga grunddata. Produktkatalog för öppna geodata
 Skogliga grunddata Produktkatalog för öppna geodata Kartprodukter - skog VOL = Volym i m3sk/ha HGV = Grundytevägd medelhöjd i dm GY = Grundyta i m2/ha DGV = Grundytevägd medeldiameter i cm BIO = Biomassa
Skogliga grunddata Produktkatalog för öppna geodata Kartprodukter - skog VOL = Volym i m3sk/ha HGV = Grundytevägd medelhöjd i dm GY = Grundyta i m2/ha DGV = Grundytevägd medeldiameter i cm BIO = Biomassa
Laboration 5: Regressionsanalys. 1 Förberedelseuppgifter. 2 Enkel linjär regression DATORLABORATION 5 MATEMATISK STATISTIK FÖR I, FMS 012, HT-08
 LUNDS TEKNISKA HÖGSKOLA MATEMATIKCENTRUM MATEMATISK STATISTIK Laboration 5: Regressionsanalys DATORLABORATION 5 MATEMATISK STATISTIK FÖR I, FMS 012, HT-08 Syftet med den här laborationen är att du skall
LUNDS TEKNISKA HÖGSKOLA MATEMATIKCENTRUM MATEMATISK STATISTIK Laboration 5: Regressionsanalys DATORLABORATION 5 MATEMATISK STATISTIK FÖR I, FMS 012, HT-08 Syftet med den här laborationen är att du skall
F3 Introduktion Stickprov
 Utrotningshotad tandnoting i arktiska vatten Inferens om väntevärde baserat på medelvärde och standardavvikelse Matematik och statistik för biologer, 10 hp Tandnoting är en torskliknande fisk som lever
Utrotningshotad tandnoting i arktiska vatten Inferens om väntevärde baserat på medelvärde och standardavvikelse Matematik och statistik för biologer, 10 hp Tandnoting är en torskliknande fisk som lever
Prediktera. Statistik för modellval och prediktion. Trend? - Syrehalt beroende på kovariater. Sambands- och trendanalys
 Statistik för modellval och prediktion att beskriva, förklara och förutsäga Georg Lindgren Prediktera Matematisk statistik, Lunds universitet stik för modellval och prediktion p.1/28 Statistik för modellval
Statistik för modellval och prediktion att beskriva, förklara och förutsäga Georg Lindgren Prediktera Matematisk statistik, Lunds universitet stik för modellval och prediktion p.1/28 Statistik för modellval
Upprepade mönster (fortsättning från del 1)
") Modul: Algebra Del 2: Resonemangsförmåga Upprepade mönster (fortsättning från del 1) Anna-Lena Ekdahl och Robert Gunnarsson, Högskolan i Jönköping Ett viktigt syfte med att arbeta med upprepade mönster
Modul: Algebra Del 2: Resonemangsförmåga Upprepade mönster (fortsättning från del 1) Anna-Lena Ekdahl och Robert Gunnarsson, Högskolan i Jönköping Ett viktigt syfte med att arbeta med upprepade mönster
1. Compute the following matrix: (2 p) 2. Compute the determinant of the following matrix: (2 p)
 2. Compute the determinant of the following matrix: (2 p)") UMEÅ UNIVERSITY Department of Mathematics and Mathematical Statistics Pre-exam in mathematics Linear algebra 2012-02-07 1. Compute the following matrix: (2 p 3 1 2 3 2 2 7 ( 4 3 5 2 2. Compute the determinant
UMEÅ UNIVERSITY Department of Mathematics and Mathematical Statistics Pre-exam in mathematics Linear algebra 2012-02-07 1. Compute the following matrix: (2 p 3 1 2 3 2 2 7 ( 4 3 5 2 2. Compute the determinant
Kartritarutbildning Sälen 2011-06-29 2011-07-01 Övningar. Dokumenttyp Instruktion Område Övningar
 Kartritarutbildning Sälen 2011-06-29 2011-07-01 Jerker Boman/+46 (0)+46 (0)26 546321 2011-06-28 1 (22) Innehållsförteckning Övning 1 Installera OL Laser 3 Ladda ner installationsfiler... 3 Installera OL
Kartritarutbildning Sälen 2011-06-29 2011-07-01 Jerker Boman/+46 (0)+46 (0)26 546321 2011-06-28 1 (22) Innehållsförteckning Övning 1 Installera OL Laser 3 Ladda ner installationsfiler... 3 Installera OL
Delprov A Muntligt delprov
 Delprov A Muntligt delprov Äp6Ma15 Delprov A 15 Beskrivning av delprov A, muntligt delprov Det muntliga delprovet kan genomföras fr.o.m. vecka 11 och resten av vårterminen. Det muntliga delprovet handlar
Delprov A Muntligt delprov Äp6Ma15 Delprov A 15 Beskrivning av delprov A, muntligt delprov Det muntliga delprovet kan genomföras fr.o.m. vecka 11 och resten av vårterminen. Det muntliga delprovet handlar
Institutionen för matematik och datavetenskap Karlstads universitet. GeoGebra. ett digitalt verktyg för framtidens matematikundervisning
 Karlstads GeoGebrainstitut Institutionen för matematik och datavetenskap Karlstads universitet Mats Brunström Maria Fahlgren GeoGebra ett digitalt verktyg för framtidens matematikundervisning Invigning
Karlstads GeoGebrainstitut Institutionen för matematik och datavetenskap Karlstads universitet Mats Brunström Maria Fahlgren GeoGebra ett digitalt verktyg för framtidens matematikundervisning Invigning
Solpotentialstudier Hur?
 Solpotentialstudier Hur? Verktyg, metoder och dataunderlag Mats Elfström / mats.elfstrom@giskraft.com Potentialuppskattning i byggd miljö Olika verktyg Olika typer av data Rumslig analys Summering Vidare
Solpotentialstudier Hur? Verktyg, metoder och dataunderlag Mats Elfström / mats.elfstrom@giskraft.com Potentialuppskattning i byggd miljö Olika verktyg Olika typer av data Rumslig analys Summering Vidare
Torbjörn Westin, Spacemetric AB Simon Ahlberg, FORAN Remote Sensing AB
 Torbjörn Westin, Spacemetric AB Simon Ahlberg, FORAN Remote Sensing AB Introduktion Korta företagspresentationer Motiv och bakgrund Bilder, ljusberoende Frikoppla laserdata från bilder Metod Laserdata,
Torbjörn Westin, Spacemetric AB Simon Ahlberg, FORAN Remote Sensing AB Introduktion Korta företagspresentationer Motiv och bakgrund Bilder, ljusberoende Frikoppla laserdata från bilder Metod Laserdata,
Arbeta med normalfördelningar
 Arbeta med normalfördelningar I en större undersökning om hur kvinnors längd gjorde man undersökning hos kvinnor i ett viss åldersintervall. Man drog sedan ett slumpmässigt urval på 2000 kvinnor och resultatet
Arbeta med normalfördelningar I en större undersökning om hur kvinnors längd gjorde man undersökning hos kvinnor i ett viss åldersintervall. Man drog sedan ett slumpmässigt urval på 2000 kvinnor och resultatet
1(9) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: Produktbeskrivning: Höjdmodell Visning
 Datum: Dokumentversion: Avser tjänstens gränssnittsversion: Produktbeskrivning: Höjdmodell Visning") 1(9) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: 2018-11-22 1.2 1.1.0 Produktbeskrivning: Höjdmodell Visning LANTMÄTERIET 2018-11-22 2 (9) Innehållsförteckning 1 Allmän beskrivning... 3
1(9) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: 2018-11-22 1.2 1.1.0 Produktbeskrivning: Höjdmodell Visning LANTMÄTERIET 2018-11-22 2 (9) Innehållsförteckning 1 Allmän beskrivning... 3
Högskoleprovet Kvantitativ del
 Högskoleprovet Kvantitativ del Här följer anvisningar till de kvantitativa delproven XYZ, KVA, NOG och DTK. Provhäftet innehåller 40 uppgifter och den totala provtiden är 55 minuter. Ägna inte för lång
Högskoleprovet Kvantitativ del Här följer anvisningar till de kvantitativa delproven XYZ, KVA, NOG och DTK. Provhäftet innehåller 40 uppgifter och den totala provtiden är 55 minuter. Ägna inte för lång
Introduktion till statistik för statsvetare
 Stockholms universitet November 2011 Data på annat sätt - I Stolpdiagram Data på annat sätt - II Histogram För kvalitativa data som nominal- och ordinaldata infördes stapeldiagram. För kvantitativa data
Stockholms universitet November 2011 Data på annat sätt - I Stolpdiagram Data på annat sätt - II Histogram För kvalitativa data som nominal- och ordinaldata infördes stapeldiagram. För kvantitativa data
Vad kan fjärranalystekniken bidra med?
 Vad kan fjärranalystekniken bidra med? Håkan Olsson Institutionen för skoglig resurshushållning Avdelningen för skoglig fjärranalys e-post: hakan.olsson@slu.se Från rymden till marken via flyg och UAV
Vad kan fjärranalystekniken bidra med? Håkan Olsson Institutionen för skoglig resurshushållning Avdelningen för skoglig fjärranalys e-post: hakan.olsson@slu.se Från rymden till marken via flyg och UAV
Föreläsning 7. Statistikens grunder.
 Föreläsning 7. Statistikens grunder. Jesper Rydén Matematiska institutionen, Uppsala universitet jesper.ryden@math.uu.se 1MS008, 1MS777 vt 2016 Föreläsningens innehåll Översikt, dagens föreläsning: Inledande
Föreläsning 7. Statistikens grunder. Jesper Rydén Matematiska institutionen, Uppsala universitet jesper.ryden@math.uu.se 1MS008, 1MS777 vt 2016 Föreläsningens innehåll Översikt, dagens föreläsning: Inledande
P Kontroll och inmätning av diken i potentiella utströmningsområden i Laxemar. Valideringstest av ythydrologisk modellering
 P-05-238 Kontroll och inmätning av diken i potentiella utströmningsområden i Laxemar Valideringstest av ythydrologisk modellering Emma Bosson, Sten Berglund Svensk Kärnbränslehantering AB September 2005
P-05-238 Kontroll och inmätning av diken i potentiella utströmningsområden i Laxemar Valideringstest av ythydrologisk modellering Emma Bosson, Sten Berglund Svensk Kärnbränslehantering AB September 2005
Hur ser skogsnäringen på ökande mängder av satellitdata? Erik Willén
 Hur ser skogsnäringen på ökande mängder av satellitdata? Erik Willén Skogforsk skall tillföra svenskt skogsbruk tillämpbara kunskaper, tjänster och produkter som bidrar till ett lönsamt, hållbart bruk
Hur ser skogsnäringen på ökande mängder av satellitdata? Erik Willén Skogforsk skall tillföra svenskt skogsbruk tillämpbara kunskaper, tjänster och produkter som bidrar till ett lönsamt, hållbart bruk
1(9) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: Produktbeskrivning: Höjdmodell Visning
 Datum: Dokumentversion: Avser tjänstens gränssnittsversion: Produktbeskrivning: Höjdmodell Visning") 1(9) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: 2019-01-28 1.3 1.1.0 Produktbeskrivning: Höjdmodell Visning LANTMÄTERIET 2019-01-28 2 (9) Innehållsförteckning 1 Allmän beskrivning... 3
1(9) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: 2019-01-28 1.3 1.1.0 Produktbeskrivning: Höjdmodell Visning LANTMÄTERIET 2019-01-28 2 (9) Innehållsförteckning 1 Allmän beskrivning... 3
Grundläggande matematisk statistik
 Grundläggande matematisk statistik Linjär Regression Uwe Menzel, 2018 uwe.menzel@slu.se; uwe.menzel@matstat.de www.matstat.de Linjär Regression y i y 5 y 3 mätvärden x i, y i y 1 x 1 x 2 x 3 x 4 x 6 x
Grundläggande matematisk statistik Linjär Regression Uwe Menzel, 2018 uwe.menzel@slu.se; uwe.menzel@matstat.de www.matstat.de Linjär Regression y i y 5 y 3 mätvärden x i, y i y 1 x 1 x 2 x 3 x 4 x 6 x
Demonstration av storskalig kartering av virkesförråd med radarinterferometri
 Demonstration av storskalig kartering av virkesförråd med radarinterferometri Maciej Soja, Lars Ulander Chalmers tekniska högskola, Göteborg Johan Fransson, Mats Nilsson, Henrik Persson Sveriges lantbruksuniversitet,
Demonstration av storskalig kartering av virkesförråd med radarinterferometri Maciej Soja, Lars Ulander Chalmers tekniska högskola, Göteborg Johan Fransson, Mats Nilsson, Henrik Persson Sveriges lantbruksuniversitet,
Betrakta kopparutbytet från malm från en viss gruva. För att kontrollera detta tar man ut n =16 prover och mäter kopparhalten i dessa.
 Betrakta kopparutbytet från malm från en viss gruva. Anta att budgeten för utbytet är beräknad på att kopparhalten ligger på 70 %. För att kontrollera detta tar man ut n =16 prover och mäter kopparhalten
Betrakta kopparutbytet från malm från en viss gruva. Anta att budgeten för utbytet är beräknad på att kopparhalten ligger på 70 %. För att kontrollera detta tar man ut n =16 prover och mäter kopparhalten
1 Förberedelseuppgifter
 LUNDS TEKNISKA HÖGSKOLA MATEMATIKCENTRUM MATEMATISK STATISTIK LABORATION 2 MATEMATISK STATISTIK FÖR B, K, N, BME OCH KEMISTER; FMS086 & MASB02 Syfte: Syftet med dagens laborationen är att du skall: bli
LUNDS TEKNISKA HÖGSKOLA MATEMATIKCENTRUM MATEMATISK STATISTIK LABORATION 2 MATEMATISK STATISTIK FÖR B, K, N, BME OCH KEMISTER; FMS086 & MASB02 Syfte: Syftet med dagens laborationen är att du skall: bli
Distribution av skogliga grunddata. Swedish University of Agricultural Sciences Forest Remote Sensing
 Distribution av skogliga grunddata Grundprodukter Produkter Spridningskanaler Producent Tidplan Visningstjänst Nedladdningsbart Trädhöjdsraster Ja Nej Upphandlat Tillgängligt* Virkesförråd Ja Ja SLU Tillgängligt*
Distribution av skogliga grunddata Grundprodukter Produkter Spridningskanaler Producent Tidplan Visningstjänst Nedladdningsbart Trädhöjdsraster Ja Nej Upphandlat Tillgängligt* Virkesförråd Ja Ja SLU Tillgängligt*
13.1 Matematisk statistik
 13.1 Matematisk statistik 13.1.1 Grundläggande begrepp I den här föreläsningen kommer vi att definiera och exemplifiera ett antal begrepp som sedan kommer att följa oss genom hela kursen. Det är därför
13.1 Matematisk statistik 13.1.1 Grundläggande begrepp I den här föreläsningen kommer vi att definiera och exemplifiera ett antal begrepp som sedan kommer att följa oss genom hela kursen. Det är därför
DOKUMENTATION AV METOD
 DOKUMENTATION AV METOD UPPDRAG MSB_NNH+ VERSION 1.2 DATUM UPPDRAGSNUMMER 6605212000 GIS-analys: Ta fram utbredningsskikt för olika höjder över havet från Nationell höjdmodell (ASCII-grid) 1 (11) S w e
DOKUMENTATION AV METOD UPPDRAG MSB_NNH+ VERSION 1.2 DATUM UPPDRAGSNUMMER 6605212000 GIS-analys: Ta fram utbredningsskikt för olika höjder över havet från Nationell höjdmodell (ASCII-grid) 1 (11) S w e
1(9) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: Produktbeskrivning: Höjdmodell Visning
 Datum: Dokumentversion: Avser tjänstens gränssnittsversion: Produktbeskrivning: Höjdmodell Visning") 1(9) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: 2019-05-28 1.4 1.1.0 Produktbeskrivning: Höjdmodell Visning LANTMÄTERIET 2019-05-28 2 (9) Innehållsförteckning 1 Allmän beskrivning... 3
1(9) Datum: Dokumentversion: Avser tjänstens gränssnittsversion: 2019-05-28 1.4 1.1.0 Produktbeskrivning: Höjdmodell Visning LANTMÄTERIET 2019-05-28 2 (9) Innehållsförteckning 1 Allmän beskrivning... 3
Uppgift 1. Produktmomentkorrelationskoefficienten
 Uppgift 1 Produktmomentkorrelationskoefficienten Både Vikt och Längd är variabler på kvotskalan och således kvantitativa variabler. Det innebär att vi inte har så stor nytta av korstabeller om vi vill
Uppgift 1 Produktmomentkorrelationskoefficienten Både Vikt och Längd är variabler på kvotskalan och således kvantitativa variabler. Det innebär att vi inte har så stor nytta av korstabeller om vi vill